Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
PLANEJAMENTO DE CAMINHO LIVRE DE COLISÃO PARA ROBÔ SCARA EM AMBIENTE
MONITORADO POR SENSOR DE IMAGEM
NÍCOLAS S. PEREIRA, JOSÉ L. N. DA SILVA, GEORGE A. P. THÉ
Centro de Referência em Automação e Robótica, Depto. de Engenharia de Teleinformática, Universidade
Federal do Ceará
Campus do Pici, Bloco 725, 60.455-970, Fortaleza, CE, BRASIL
E-mails: [email protected], [email protected], [email protected]
Abstract In this work, the problem of free collision path planning for a SCARA manipulator inside of a space monitored by a
low resolution image industrial sensor is considered. It is presented the applied methodology, where the systems integration exposes a solution for the problem presented taking into account the entire structure of the robot.
Keywords Path planning, Digital image processing, SCARA, Systems integration.
Resumo Neste trabalho, considera-se o problema de planejamento de caminhos livres de colisão para um manipulador
SCARA que se encontra em um espaço monitorado por um sensor industrial de imagens de baixa resolução. É apresentada a
metodologia aplicada, onde a partir da integração de sistemas é exposta uma solução para o problema formulado levando em
conta toda a estrutura do robô.
Palavras-chave Planejamento de caminhos, Processamento digital de imagens, SCARA, Integração de sistemas.
1
Na literatura há duas abordagens principais para
este problema (Spong, 2006): o algoritmo de campos
de potenciais artificiais e os métodos de roadmaps
probabilísticos, onde a primeira abordagem é
utilizada neste trabalho.
O presente trabalho se encontra neste contexto, a
apresentação e descrição de uma solução para o
problema de prevenção de colisões de um robô
SCARA, mediante o uso de uma câmera industrial.
Comparado a outros trabalhos da literatura, aqui
consideramos colisões com toda a cadeia articulada
do robô. Os resultados apresentados se referem à
abordagem do problema no plano cartesiano, apenas.
Este artigo está organizado como segue. Seção 2
trata da formulação do problema o qual o trabalho se
propõe a desenvolver uma solução. Seção 3 apresenta
o dispositivo utilizado para aquisição de imagens.
Seção 4 descreve a metodologia desenvolvida para
resolução do problema, explicitando a teoria na qual
a solução se baseia. Seção 5 apresenta os resultados
obtidos para um cenário tal qual o formulado na
seção 2. Na seção 6 apresenta-se a conclusão do
artigo e menções para possíveis trabalhos futuros.
Introdução
O uso de robôs em tarefas de manipulação tem
crescido sensivelmente no contexto de produção
industrial, nos últimos anos. Este problema é
especialmente desafiador porque a identificação e
localização dos obstáculos implica o uso de técnicas
de processamento mais sofisticadas, de fato, não é
raro que se utilize de técnicas de decisão para o
reconhecimento de obstáculos, que podem até mesmo
estar em movimento na cena.
Uma questão neste contexto é a necessidade de
se transformar a informação de localização do
obstáculo na cena, levando-a do domínio de pontos
do espaço cartesiano em pontos do espaço de
configurações do robô. Isto se consegue mediante
cálculo de cinemática inversa do robô em questão,
para cada ponto da superfície do obstáculo, gerando
o chamado espaço de configurações de obstáculos ou
QO. A prevenção de uma colisão é, portanto, uma
estratégia que impeça o robô de atingir alguma
configuração constante em QO. A complexidade e o
esforço computacional para gerar o QO de uma dada
cena crescem se não apenas o end-effector, mas toda
a cadeia articulada do robô tiver que ser protegida de
colisões. Como mencionado em (Spong, 2006), a
complexidade vem do fato de que o tamanho da
representação do espaço de configurações tende a
crescer exponencialmente com o número de graus de
liberdade.
Naturalmente, se o problema de prevenção de
colisão considerar as três dimensões cartesianas na
descrição do robô e dos objetos da cena, a solução de
obtenção QO ganha em sofisticação, em comparação
com a uma representação 2D, mas isto ocorre ao
custo do aumento de esforço comoputacional.
2 Formulação do problema
Considere a situação de um ambiente monitorado
por um sensor de imagens que mede distâncias e
neste ambiente um robô do tipo SCARA deverá
partir de uma posição inicial fixa e atingir um ponto
específico no espaço, desviando de obstáculos
presentes no ambiente monitorado.
A ideia consiste em se utilizar das imagens
provenientes do sensor para realizar o planejamento
3946
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
de caminho para o manipulador sem que haja colisão
da sua estrutura com os obstáculos.
devido a forma circular proporcionar uma redução da
possibilidade de mínimos locais (Volpe, 1990).
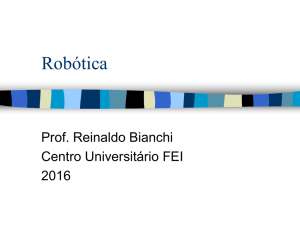
A partir da figura 2 serão demonstradas técnicas
de PDI com a finalidade de se obter o mapeamento
dos obstáculos.
3 Sensor de imagens
O sensor PMD 03D200 é uma câmera de
medição de distância utilizada em ambientes
industriais. Ele contém uma matriz de 64x50 pixels e
é capaz de prover imagens de baixa resolução de
intensidade de luminosidade ou de distância. Para
este trabalho são utilizadas imagens de distância por
não apresentar a mesma dependência do material das
superfícies monitoradas.
A medição de distância do sensor é baseada no
princípio de tempo de voo onde é calculado o tempo
que um feixe de luz gasta para atingir a superfície
monitorada e retornar ao dispositivo.
Figura 2: Imagem de distância obtida do sensor
(ampliada em duas vezes para melhor visualização).
4.1.1 Limiarização
A limiarização é uma das técnicas utilizadas para
se realizar uma segmentação numa imagem, onde
segmentação pode ser definida como a subdivisão de
uma imagem em regiões ou objetos que a compõem
(Gonzalez, 2009). Para o problema em questão, a
segmentação é utilizada para dividir a imagem em
obstáculo e fundo, a partir dos níveis de cinza
presentes na imagem.
De maneira geral, seleciona-se um valor de
referência de tom de cinza e a partir deste referencial
se impõe que valores de cinza superiores são
considerados obstáculo (recebem o valor 255,
apresentando a cor branca) e valores de cinza
inferiores ao referencial são considerados fundo
(recebem o valor de 0, apresentando a cor preta).
Considerando
que
os
cenários
não
necessariamente serão os mesmos, uma escolha
manual de valor de referência não é adequada, pois
para diferentes situações podem ser necessários
diferentes valores de referência, impossibilitando a
análise automática com resultado ótimo. Visando esta
solução mais global, que se adeque melhor a
diferentes tipos de cenários, é utilizado o método de
Otsu (Otsu, 1979), que é uma abordagem ótima no
sentido de que maximiza a variância entre as classes
distintas (Gonzalez, 2009).
Aplicando o método de Otsu na figura 2, obtémse o resultado visualizado pela figura 3.
Figura 1: Sensor industrial de imagens PMD
O3D200.
4 Metodologia
A metodologia apresentada é dividida em duas
partes onde a primeira responsável pelo
processamento digital de imagem (PDI), englobando
desde a obtenção da imagem do sensor até o
mapeamento dos obstáculos na cena e a segunda
parte sendo aquela responsável pelo processamento
do mapeamento dos obstáculos com intuito de
obtenção do caminho livre de colisão.
4.1 Processamento digital de imagens
O processamento digital de imagens é utilizado
como um conjunto de tratamentos realizados na
imagem vinda do sensor com o intuito de extrair
informações referentes aos obstáculos presentes na
cena em questão. As saídas que se deseja obter
através deste PDI é a posição de centro de cada
obstáculo no espaço cartesiano e valores de raio para
cada obstáculo, permitindo que estes possam ser
inteiramente representados por circunferências que os
circunscrevem. É preferível a circunferência que
circunscreve o obstáculo ao contorno deste próprio
3947
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
Figura 3: Imagem segmentada após utilização do
método de Otsu (ampliada em duas vezes para
melhor visualização).
Figura 5: Resultado da subtração da figura 3 e a sua
imagem erodida a partir do elemento estruturante
representado na figura 4.
Apesar de inúmeros os métodos disponíveis para
extração de fronteiras, considerando que a imagem
utilizada já se encontra binarizada, este método
apresenta resultados precisos junto de um baixo custo
computacional.
4.1.2 Erosão e extração de fronteiras
Elementos estruturantes (ES) são pequenos
conjuntos ou subimagens usadas para examinar uma
imagem buscando propriedades de interesse
(Gonzalez, 2009). Estes elementos são amplamente
empregados no processamento morfológico de
imagens para formular operações, como a erosão, por
exemplo.
Com A e B como conjuntos de Z², a erosão de A
por B, indicada por AΘB é definida como:
(1)
AB {z | ( B) A}
4.1.3 Extração de componentes conexos
A extração de componentes conexos de uma
imagem binária é essencial para muitas aplicações
automáticas de análise de imagem (Gonzalez, 2009).
A ideia por trás do método, é selecionar pixels
referentes ao conjunto dos obstáculos e através de
morfologia, descrever o objeto que representa todos
os pixels com conectividade.
Desta forma, é possível determinar quantos
objetos estão presentes numa cena e quais pixels são
referentes a cada objeto.
z
A equação (1) indica que a erosão de A por B é
o conjunto de todos os pontos z de forma que B,
transladado por z, está contido em A (Gonzalez,
2009). Na discussão apresentada, o conjunto B é
considerado um elemento estruturante.
Ao se realizar erosão na figura 3, utilizando
como elemento estruturante o conjunto apresentado
na figura 4, o efeito obtido na imagem resultante é
equivalente a remoção dos pixels de fronteira dos
objetos presentes na figura 3. Efetuando uma
subtração entre as figuras 3 e sua respectiva imagem
erodida o efeito obtido é o apresentado pela figura 5.
4.1.4 Circunscrição de obstáculo
A circunscrição do obstáculo é obtida calculando
os valores de centro e raio da circunferência que irá
circunscrever o obstáculo.
A partir de uma média aritmética das
coordenadas x e y dos pixels de fronteira dos
obstáculos, apresentados na figura 5, são obtidas as
posições dos pixels referentes aos centros de cada
obstáculo.
Utilizando os pixels de centro de cada obstáculo
e realizando um cálculo de distância entre estes e
cada pixel de fronteira dos obstáculos, obtém-se a
maior distância entre o centro e a fronteira do
obstáculo, que é o valor utilizado como raio da
circunferência que o engloba.
A figura 6 mostra o resultado que se obtém ao se
calcular os centros e raios para cada obstáculo.
Figura 4: Elemento estruturante utilizado na erosão.
3948
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
conseguir realizar um mapeamento de um ponto no
espeço cartesiano a partir de uma entrada
representada como um conjunto de articulações,
ângulos das junções do manipulador.
Os quatro parâmetros citados são: comprimento
do elo (representado pela letra ‘a’), ângulo de torção
do elo (representado pela letra ‘α’), deslocamento ou
offset do elo (representado pela ‘d’) e ângulo de
junção (representado pela letra ‘θ’) (Spong, 2006).
Os parâmetros de DH levantados para o robô
associado neste trabalho são apresentados na tabela
1.
Tabela 1: Parâmetros de DH para o manipulador.
Figura 6: Obstáculos circunscritos.
Eixo
A partir das técnicas apresentadas, obtém-se o
mapeamento dos obstáculos, assim como sua
circunscrição, a partir das imagens vindas do sensor.
O manipulador utilizado como referência para
este trabalho é um SCARA.
θ(°)
d(cm)
0
1
0
0
0
2
a1
0
0
3
4.2 Planejamento de caminho sem colisão
α(°)
a(cm)
-
1
2
a2
0
0
0
Onde a1 possui 34.8 cm e a2 possui 28.4 cm.
A partir da tabela 1, é possível definir a
transformação, representada por T, que mapeia o
conjunto de ângulos das articulações no espaço
cartesiano, assim como mostra a equação 2:
(2)
P(x, y) T{Q( , )}
1
2
Como resultado do mapeamento, tem-se as
equações representadas por (3) e (4) para x e y,
respectivamente, a partir dos ângulos 1 e 2 :
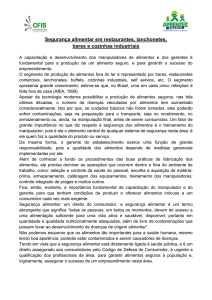
Figura 7: Manipulador SCARA utilizado como
referência.
Como formulado anteriormente, a situação que
se busca analisar é aquela onde os obstáculos
atrapalhem o deslocamento das duas junções de
rotação do manipulador apresentado, que são
coplanares, tornando o problema uma análise de um
robô planar de dois graus de liberdade. A partir da
figura 7, pode-se ver que as dimensões dos elos
referentes as junções de rotação são de 34.8cm e 28.4
cm respectivamente.
x a2 cos(1 2 ) a1 cos(1 )
(3)
y a2 sen(1 2 ) a1sen(1 )
(4)
4.2.2 Cinemática inversa
O problema da cinemática inversa busca obter os
valores de ângulo de rotação do manipulador a partir
dos valores de posição cartesiana do atuador do
manipulador (Spong, 2006).
A cinemática inversa de um robô não
necessariamente possui uma única solução,
considerando que o manipulador pode adotar mais de
uma configuração para atingir o mesmo ponto no
espaço cartesiano. Neste trabalho é utilizada uma
solução geométrica para obtenção da cinemática
inversa do manipulador.
A partir da figura 8 obtém-se a seguinte relação:
4.2.1 Cinemática direta
Cinemática é a ciência do movimento de um
objeto sem levar em conta as forças que geram este
movimento (Craig, 2005). O problema da cinemática
direta é determinar a posição e orientação do atuador
de um robô, dados os valores dos ângulos das juntas
deste robô (Spong, 2006).
Para o desenvolvimento da cinemática direta
neste trabalho, será utilizado o método convencional
de Denavit-Hartenberg (DH), que se baseia em
distribuir ao longo da estrutura cinemática do
manipulador um conjunto de eixos de referência e a
partir destes eixos e 4 parâmetros específicos,
d x2 y2
Aplicando a lei dos cossenos, vê-se que:
d 2 a1 a2
2 arccos(
)
2a1a2
2
3949
2
(5)
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
Considerando a área monitorada pelo sensor de
imagem e a posição onde se encontra o manipulador,
o espaço de trabalho do manipulador foi estipulado
pelas seguintes expressões:
20 1 150
175 2 175
A figura 10 mostra o espaço de trabalho do
manipulador e quais áreas sua estrutura cinemática
permite que ele seja capaz de atingir dentro do
espaço monitorado.
Figura 8: Manipulação geométrica utilizada para
cálculo do ângulo 2 na cinemática inversa.
Espaço de trabalho do manipulador
80
40
A partir da figura 9, obtém-se as seguintes
relações:
Eixo y
a2 sen( 2 )
tan( )
a1 a2 cos( 2 )
y
tan( )
x
1
0
-40
-60
-60
-40
-20
0
20
40
60
80
Eixo x
tan( ) tan( )
1 tan( ) tan( )
num
den
20
-20
Figura 10: Espaço de trabalho do manipulador.
1 arctan
1 arctan
Espaço Monitorado
Espaço de trabalho
60
Para o robô utilizado como referência deste
trabalho, cada par de ângulos 1 e 2 é suficiente
para representar uma configuração na qual o
manipulador se encontra. O conjunto de todas as
configurações possíveis é referido como espaço de
configurações (Spong, 2006), representado por Q.
Uma colisão ocorre quando o robô entra em
contato com um obstáculo. O conjunto de todas as
configurações em que ocorre uma colisão é referido
como espaço de configurações de obstáculos (Spong,
2006), representado por QO.
Para o mapeamento de QO, são calculadas as
configurações do robô, a partir da cinemática inversa,
utilizando como entrada as coordenadas cartesianas
de cada ponto das circunferências que representam os
obstáculos. Porém com esta abordagem, é mapeado
somente o QO referente ao atuador do manipulador,
de tal forma que as colisões com a estrutura do
manipulador não estã sendo analisadas. Para que se
tenha um QO que represente por completo as
configurações de colisão, a estrutura cinemática do
manipulador é discretizada em pontos de controle,
agregando uma nova cinemática inversa para cada
ponto de controle atribuído.
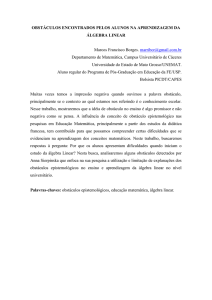
A figura 11 mostra em (a) QO calculado somente
para o atuador do manipulador (b) QO calculado para
o manipulador discretizado em 2 pontos (c) QO
calculado para o manipulador discretizado em 10
pontos.
(6)
Onde,
num (a1 a2 cos( 2 ) y xa2 sen( 2 )
den (a1 a2 cos( 2 ) x ya2 sen( 2 )
Figura 9: Manipulação geométrica utilizada para
cálculo do ângulo 1 na cinemática inversa.
4.2.3 Espaço de trabalho e cálculo de QO
O espaço de trabalho de um robô é o volume
total varrido pelo atuador do robô quando este
executa todas as suas configurações possíveis. O
espaço de trabalho é limitado pela geometria do robô,
assim como pelas limitações mecânicas das juntas
(Spong, 2006).
3950
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
elo, o valor do ângulo
2
é irrelevante, sendo então
considerados todos os valores de 2 dentro do
espaço de trabalho como sendo pertencentes a QO,
para este 1 específico.
4.2.4 Planejamento de caminho por campo potencial
artificial
A ideia por trás do método de campos de
potenciais artificiais para planejamento de caminho é
tratar o robô como uma partícula no espaço de
configurações sob a influência de um campo de
potencial artificial U. O campo U é construído de tal
forma que o robô é atraído pela configuração em que
seu ponto objetivo é alcançado e repelido pelas
configurações QO (Spong, 2006).
De maneira geral, o campo U é um campo
resultante de uma adição onde uma parcela constitui
a atração e a outra parcela constitui a repulsão, tal
qual na equação 7 (Spong, 2006):
(a)
U ( ) U atr ( ) U rep ( )
(7)
A força resultante dos campos de potencial
artificiais que deve ser aplicada no robô é dada por:
F ( ) Fatr ( ) Frep ( )
Onde,
Fatr ( ) [U atr ( )]
Frep ( ) [U rep ( )]
Onde F( ) é a força resultante, Fatr( ) é a
força de atração gerada pela configuração final
desejada e Frep( ) é a resultante de forças
repulsivas geradas pelos obstáculos.
Para o campo potencial de atração, geralmente se
adotam uma das duas formas:
1. Cônico:
(b)
U atr ( ) Ka o( ) o(f )
2.
(8)
Parabolóide:
U atr ( )
1
Ka o( ) o(f )
2
2
(9)
Onde,
Ka = Constante de atração,
o( ) = Configuração atual do robô,
o( f) = Configuração final desejada.
(c)
Figura 11: Espaços de configuração de obstáculos
(QO) calculados para discretização em (a) 1 ponto
(b) 2 pontos (c) 10 pontos.
Uma escolha que consegue combinar as
vantagens de cada uma das possibilidades descritas
por (8) e (9) é definindo uma distância de referência
onde para distâncias acima desta referência o
potencial é da forma cônica e para distâncias menores
que a referência o potencial é da forma de
parabolóide.
A faixa de valores de QO similar a um retângulo,
presente nas figuras 11 (b) e (c), corresponde a
colisão dos obstáculos com o primeiro elo, indicado
na figura 9 com comprimento a1. Esta faixa de
valores de QO se apresenta desta forma devido ao
fato de que caso ocorra colisão com este primeiro
3951
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
5 Resultados
1
U atr1 ( ) dKa o( ) o(f ) d 2 Ka (10
2
Os resultados apresentados tratam de simulações
computacionais utilizando a modelagem feita para o
manipulador SCARA.
As figuras (12) e (13) mostram as etapas
desenvolvidas desde a aquisição da imagem via
sensor, até a geração do caminho para o manipulador.
)
U atr 2 ( )
1
Ka o( ) o(f )
2
2
(11)
Ou seja, para distâncias maiores que a distância
de referência, aqui indicada pela letra ‘d’, a função
do campo de atração toma a forma de (10).
Analogamente, para distâncias menores, ou iguais,
que a distância de referência a função do campo de
atração toma a forma de (11).
Consequentemente, a força de atração resultante
é apresentada:
o( ) o(f )
o( ) o(f )
(12)
Fatr 2 ( ) Ka(o( ) o(f ))
(13)
Fatr1 ( ) dKa
Onde a força de atração assume a forma de (12)
para distâcias maiores que a de referência e assume a
forma de (13) para distâncias menores, ou iguais, que
a de referência.
O campo potencial de respulsão, por sua vez,
pode ser definido como:
1 1
1
Kr
2 p(o( )) p
U rep 2 ( ) 0
U rep1 ( )
Figura 12: Imagem do cenário obtida pelo sensor.
(14)
(15)
Onde,
Kr = Constante de repulsão,
p(o( )) = Menor distância entre o( ) e todo o
QO do obstáculo específico,
p = distância de referência.
Caso a configuração do robô se encontre numa
distância menor que a referência, o campo de
repulsão assume a forma de (14). Caso contrário, os
obstáculos não influem no caminho descrito pelo
robô, pois o campo de repulsão assume a forma de
(15). Dessa forma os obstáculos só passam a influir
no planejamento do caminho do robô a partir do
momento que o robô entra numa região próxima do
obstáculo, definida pela distância de referência
representada pela letra ‘p’.
Uma questão que é constantemente apontada
com relação ao planejamento de caminhos com
campo de potencial artificial é a existência de
mínimo local. A solução utilizada neste trabalho para
amenizar os problemas obtidos com mínimos locais é
presente em (Ding, 2005). Esta solução parte da
identificação do mínimo local, seguida da adição de
uma novo campo artificial que force o manipulador a
sair da configuração que confere a condição de
mínimo local. Isto é feito fazendo o manipulador
circundar algum dos obstáculos até que o robô não se
encontre mais numa configuração de mínimo local.
Figura 13: Mapeamento
obstáculos no cenário.
e
circunscrição
dos
A posição inicial adotada foi (0,63.2) e o ponto
que deseja se alcançar no espaço cartesiano foi o
ponto (13,25), como mostra a figura (14).
Espaço cartesiano
70
Ponto de partida
Ponto objetivo
Área monitorada
60
50
Eixo y
40
30
20
10
0
0
3952
10
20
Eixo x
30
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
A partir dos resultados apresentados pode-se
concluir que a integração entre tecnologias pôde ser
feita e o resultado desejado pôde ser alcançado.
Vale ressaltar que através desta análise que se
utiliza dos pontos de controle, os resultados gerados
de desvio de colisão englobam toda a estrutura do
manipulador, não só o end-effector.
Para trabalhos futuros, a partir dos tópicos
listados e integrados neste trabalho, tem-se:
planejamento de caminhos 3D em ambientes
monitorados por sensores de imagem, análises sobre
o planejamento de caminho com processamento em
tempo real.
Figura 14: Visualização do cenário com ponto de
partida e ponto objetivo.
A figura (15) mostra o QO mapeado para o
cenário proposto pela figura (12) já com ao
planejamento de caminhos desenvolvido pelo método
de campo de potencial artificial.
200
150
Configuração inicial
Configurações desejadas
Caminho por campos de potencial
Angulo 32
100
50
0
Referências Bibliográficas
-50
CRAIG, J. J. (2005). Introduction to Robotics Mechanics and Control. Third Edition. Pearson
-150
Prentice Hall.
DING,
F., JIAO, P., BIAN, X. & WANG, H. (2005).
-200
-40 -20
0
20
40
60
80 100 120 140 160 180
AUV
Local Path Planning Based on Virtual PoAngulo 31
tential
Field. Proceedings of the IEEE InternaFigura 15: Mapeamento de QO com exibição do
tional
Conference
on Mechatronics & Automacaminho percorrido da configuração inicial à
tion
Niagara
Falls.
configuração desejada.
GONZALEZ, R.C. and WOODS, R.E. (2009).
Processamento Digital de Imagens. Third
A figura (16) simula o caminho percorrido pelo
Edition. Pearson Prentice Hall.
manipulador do ponto de origem ao ponto objetivo.
KHATIB, O. (1986). Real-time obstacle avoidance
for manipulators and mobile robots. The InternaObstáculo
60
tional Journal of Robotics Research 5(1), 90–98.
Atuador
OTSU, N. (1979). A Threshold Selection Method
Ponto inicial
Ponto objetivo
50
from
Gray-Level
Histograms.
IEEE
Área Monitorada
Transactions on Systems, Man, and Cybernetics,
40
Vol. SMC-9, No. 1.
PEREIRA, J. P. P. and DA SILVA, J. P.
30
(2012).Aplicação de algoritmos genéticos ao
problema de planejamento de caminhos com a
20
abordagem de decomposição em células
convexas para o caso aproximado. Anais do XIX
10
Congresso Brasileiro de Automática.
SPONG, M. W., HUTCHINSON, S. &
0
VIDYASAGAR, (2006). Robot Modeling and
-20
-10
0
10
20
30
40
50
Control. John Wiley & Sons
VOLPE, R. and P. Khosla (1990). Manipulator conFgira 16: Caminho percorrido pelo manipulador para
trol with superquadratic artificial potential funcir do ponto inicial ao ponto objetivo.
tions: Theory and experiments. IEEE Transactions on Systems, Man, and Cybernetics 20(6),
6 Conclusão
1423–1436.
-100
Este trabalho considera o problema de
planejamento de caminho para desvio de obstáculos
de um manipulador SCARA dentro de um espaço
monitorado por um sensor industrial de imagens. A
proposta foi utilizar um conjunto de técnicas
clássicas de processamento digital de imagens e de
prevenção de colisões e integrá-las de maneira a
resolver o problema formulado.
3953