Aula 02
Propriedades geométricas de figuras planas:
Momento Estático; Momento de Inércia; Módulo de
Resistência e Raio de Giração
1. Momento Estático
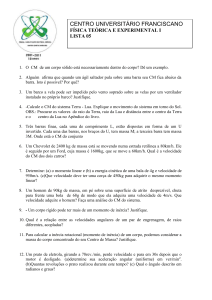
Considere uma superfície plana de área A e dois eixos ortogonais x e y
de seu plano, como mostra a figura abaixo. Seja dA um elemento diferencial de
área da superfície, o qual está genericamente posicionado com relação ao
sistema de referência adotado.
Figura 1: Elemento de área dA numa área plana A.
Define-se o momento estático de um elemento de área dA com relação
aos eixos x e y, respectivamente, como:
Por sua vez, o momento estático ou momento de primeira ordem da área
A com relação aos eixos x e y são obtidos somando-se a contribuição dos
momentos estáticos de cada elemento diferencial dA da seção. Logo, os
momentos estáticos são dados pelas seguintes integrais:
Supondo-se que as dimensões da seção estejam indicadas em cm, a
unidade dos momentos estáticos Msx e Msy são cm3.
2. Centro de Gravidade
Se um corpo for dividido em partículas mínimas, estas ficam sujeitas à
ação da gravidade, isto é, em todas estas partículas está aplicada uma força
vertical atuando de cima para baixo. A resultante de todas estas forças verticais
e paralelas entre si, constitui o peso do corpo.
Mesmo mudando a posição do corpo aplicando-lhe uma rotação, ele
permanecerá sempre sujeito à ação da gravidade. Isto significa que as forças
verticais girarão em relação ao corpo, mas continuarão sempre paralelas e
verticais. O ponto onde se cruzam as resultantes dessas forças paralelas,
qualquer que seja a posição do corpo, chama-se Centro de Gravidade (CG).
Portanto, a atração exercida pela Terra sobre um corpo rígido pode ser
representada por uma única força P. Esta força, chamada peso do corpo, é
aplicada no seu baricentro, ou centro de gravidade (CG). O centro de gravidade
pode localizar-se dentro ou fora da superfície.
O centro de gravidade de uma
superfície plana é, por definição, o ponto
de coordenadas:
Centro de Gravidade de um objeto com área A
Em alguns casos, a localização do CG pode ser feita a partir de
propriedades de simetria da figura plana.
Quando a área tiver um eixo de simetria, o CG necessariamente estará
localizado sobre este eixo.
Quando houverem dois eixos de simetria, o CG localiza-se na
intersecção dos dois.
2.1
Centro de Gravidade de uma Área Composta
Muitas vezes, uma área pode ser dividida em várias partes. Conhecendo
a posição do CG de cada uma das partes podemos determinar o CG da área
total através de:
𝑥𝐶𝐺 =
∑𝑁
𝑖=1 𝑥𝑖 𝐴𝑖
∑𝑁
𝑖=1 𝐴𝑖
, 𝑦𝐶𝐺 =
∑𝑁
𝑖=1 𝑦𝑖 𝐴𝑖
∑𝑁
𝑖=1 𝐴𝑖
.
Os termos dentro da somatória representam as posições dos CGs de
cada área composta e o denominador representa a soma das áreas de cada
parte, ou a área total.
Atenção, se houver um furo ou uma região geométrica onde não exista
material, estes devem ser incluídos como uma parte composta adicional, mas
com área negativa.
Exemplo 01 transversal.
Determinar as coordenadas
̅𝑒𝒚
̅
𝒙
do centroide da seção
̅𝑒𝒚
̅ do centroide da superfície plana
Exemplo 2: Determinar as coordenadas 𝒙
ilustrada a seguir:
3.
Inércia x Momento de Inércia
A inércia é a propriedade da matéria que faz com que esta resista a
qualquer mudança em seu movimento, seja de direção ou de velocidade.
Esta propriedade descreve-se com precisão na primeira lei do movimento
do cientista britânico Isaac Newton, que diz o seguinte: “um objeto em repouso
tende a permanecer em repouso, e um objeto em movimento tende a
continuar movendo-se em linha reta, a não ser que atue sobre ele uma força
externa”.
Qualquer corpo que gira ao redor de um eixo apresenta inércia à rotação,
isto é, uma resistência a mudar sua velocidade de rotação e a direção de seu
eixo de giro.
A inércia de um objeto à rotação está determinada por seu momento
de inércia, que não é mais que a resistência que um corpo em rotação opõe
à mudança de sua velocidade de giro.
Enquanto a inércia se aplica ao movimento linear, o momento de inércia
aplica-se à rotação. A inércia pode ser pensada como uma nova definição da
massa, pois o Momento de Inercia também depende da distribuição de massa
em um objeto. Quanto mais longe está a massa do centro de rotação, maior
é o momento de inércia.
O momento de inércia de um objeto depende de sua massa e da
distância da massa ao eixo de rotação. Este momento não é uma quantidade
única e fixa, pois ao rotacionar o objeto em torno de um eixo diferente, terá um
momento de inércia diferente, já que a distribuição de sua massa em relação ao
novo eixo é normalmente diferente. Para mudar a velocidade de giro de um
objeto com elevado momento de inércia, precisa-se de uma força maior do que
um objeto que tenha um baixo momento de inércia.
Para sistemas discretos este momento de inércia expressa-se como:
O momento de inércia nos diz como a massa do corpo, que
está rodando, está distribuída em torno do eixo de rotação.
3.1 Momento de Inércia de uma Superfície Plana.
O momento de inércia é uma característica geométrica importantíssima
no dimensionamento dos elementos de construção (vigas, colunas, etc), pois
fornece através de valores numéricos, uma noção de resistência da peça.
Quanto maior for o momento de inércia da secção transversal de uma peça,
maior será a resistência da peça. A figura abaixo ilustra bem o conceito de
momento de inércia de um elemento de construção.
A unidade do Momento de Inércia no Sistema Internacional é dada em
metros a quarta no SI: m4
Os momentos de inércia de uma superfície plana qualquer podem ser
calculados em relação a quaisquer eixos de referência x e y.
A figura abaixo ilustra dois exemplos de sistemas de eixos x e y de
referência para os quais os momentos de inércia podem ser verificados.
Tabela: Momento de Inércia em relação aos Eixos Centroidais de algumas
superfícies planas de geometrias simples.
3.2 Teorema dos Eixos Paralelos
Os momentos de inércia ( Ix e Iy ) em relação a qualquer eixo de
referência x e y de uma superfície plana qualquer são determinadas pelas
seguintes equações:
Para aplicar as equações acima é necessário dividir a superfície plana
qualquer em n superfícies planas de geometria simples conforme ilustram as
figuras abaixo:
Exemplo 3 : Determine o momento de inércia da seção com relação aos eixos
y e z como mostrado na figura abaixo:
Importante: O momento de inércia representa a resistência de uma seção
transversal em girar em torno de um eixo. Portanto, a seção acima gira mais
facilmente em torno do eixo y que do eixo z.
4. O Módulo de Resistência à Flexão
Representa em termos numéricos como determinado tipo de seção reage
ao esforço, ou seja, representa à resistência da seção em relação ao esforço de
flexão. Para cada tipo de seção transversal estudada tem-se uma equação
diferente para se calcular o valor de Wf. e é expresso como:
Wf = If / y
onde;
If => Momento de Inércia à flexão da seção transversal (mm4)
y => Distância da linha neutra à fibra externa (mm)
Tabela - Módulo de resistência à flexão em relação
Exemplo : Determinar o módulo de flexão para uma barra de seção retangular
de 3 x 8 cm, para a) b=3 cm e b) b=8 cm
5. Raio de giração
É definido como sendo a raiz quadrada da relação entre o momento de
inércia e a área da superfície. A unidade do raio de giração é o comprimento. O
raio de giração é utilizado para o estudo da flambagem.
Exemplo: A figura representa a seção transversal de uma viga “T”. Para a
figura, determinar:
a) o Centro de Gravidade;
b) o Momento de Inercia em relação ao eixo x;
c) os Módulos Resistentes superior e inferior;
d) o Raio de Giração.