Apostila de Fı́sica
Mecânica Newtoniana
Versão 0.0
1a Formulação
Eder Terceiro
13 de março de 2013
2
Sumário
1
Introdução
1.1 Mecânica . . . . . . . . . . . . . . . . .
1.2 Sistema Internacional de Unidades . .
1.2.1 Sistema de Unidades . . . . .
1.3 Exemplo: Transformação de unidades
1.4 Exercı́cios . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
9
10
10
11
13
13
2 Sistema cartesiano
15
2.1 Vetores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2 Componentes de um vetor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3 Exercı́cios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3 Composição de vetores
25
3.1 Método da Poligonal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.1.1 Cálculo das componentes dos vetores . . . . . . . . . . . . . . . . . . . . . . . 26
3
4
SUMÁRIO
3.2
Exercı́cios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Álgebra Vetorial
4.1 Vetores EM Rn . . . . . . . . . . . . . .
4.2 Operação com Vetores . . . . . . . . . . .
4.2.1 Adição de Vetores . . . . . . . . . .
4.2.2 Multiplicação por escalar . . . . .
4.3 Produto Escalar . . . . . . . . . . . . . .
4.3.1 Propriedades Do Produto Escalar
4.3.2 Exercı́cios . . . . . . . . . . . . .
4.3.3 Significado geométrico . . . . . .
4.4 Vetor Unitário numa direção dada . . . .
4.5 Exercı́cios . . . . . . . . . . . . . . . . .
4.6 Produto Vetorial . . . . . . . . . . . . .
4.6.1 Propriedades do Produto Vetorial
4.6.2 Exercı́cios . . . . . . . . . . . . .
4.6.3 Significado geométrico . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
30
35
35
35
36
36
37
39
40
40
41
42
43
44
45
47
5 Estática
55
5.1 Exercı́cios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
6 Movimento unidimensional de ponto material
69
6.1 Sistema De Coordenadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6.2 Definições Elementares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6.3 Deslocamento, velocidade média e aceleração . . . . . . . . . . . . . . . . . . . . . . . 72
SUMÁRIO
5
6.4
74
7
Exercı́cios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Cinemática
77
7.1 Movimento Retilı́neo Uniforme MRU . . . . . . . . . . . . . . . . . . . . . . . . . . 78
7.2 Exercı́cios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
8 Movimento Retilı́neo Uniformemente Variado
83
8.1 Exercı́cios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
9
Exercı́cios de Cinemática
10 Introdução a dinâmica
10.1 As leis de Newton . . . . . . . . . . . . . . . . . . . . . . .
10.1.1 Primeira Lei de Newton - Lei de Inércia . . . . . . .
10.1.2 Segunda Lei de Newton - A resultante das forças . .
10.1.3 Terceira Lei de Newton Princı́pio de Ação e Reação .
10.1.4 Discussão das três leis . . . . . . . . . . . . . . . .
10.2 Noções de força, peso e queda livre. As Leis de Newton. . .
10.3 Casos especiais . . . . . . . . . . . . . . . . . . . . . . . . .
10.3.1 Força Peso . . . . . . . . . . . . . . . . . . . . . . . .
10.3.2 Força de Atrito . . . . . . . . . . . . . . . . . . . .
10.4 Sistemas de Múltiplos Corpos . . . . . . . . . . . . . . . . .
10.5 Plano Inclinado sem atrito . . . . . . . . . . . . . . . . . .
10.6 Plano Inclinado com atrito . . . . . . . . . . . . . . . . . .
91
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
99
99
100
100
102
103
106
107
107
108
113
118
121
6
SUMÁRIO
11 Lista de Dinâmica
129
11.0.1 Dinâmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
12 Energia
12.1 Trabalho de uma força . . . . . . . . .
12.1.1 Definição . . . . . . . . . . . .
12.2 Unidade . . . . . . . . . . . . . . . .
12.3 Gráfico . . . . . . . . . . . . . . . . .
12.4 Método de Análise . . . . . . . . . . .
12.5 Aplicação 1 . . . . . . . . . . . . . . .
12.6 Aplicação 2 . . . . . . . . . . . . . . .
12.7 Casos tı́picos . . . . . . . . . . . . . .
12.7.1 Força Peso . . . . . . . . . . .
12.7.2 Força da mola . . . . . . . . .
12.7.3 Força de atrito . . . . . . . . .
12.8 Exercı́cios . . . . . . . . . . . . . . . .
12.9 Energia Cinética de um ponto material
12.9.1 Definição . . . . . . . . . . . .
12.9.2 Unidade . . . . . . . . . . . . .
12.9.3 Princı́pio do trabalho e energia
12.10Exercı́cios . . . . . . . . . . . . . . . .
12.11Potência . . . . . . . . . . . . . . . .
12.11.1 Definição . . . . . . . . . . . .
12.11.2 Unidade . . . . . . . . . . . . .
12.12Exercı́cios . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
145
145
145
148
148
149
149
152
159
159
159
160
161
164
164
165
166
166
170
170
171
171
Capı́tulo 1
Introdução
A Fı́sica estuda as relações fundamentais entre os constituintes da matéria.
Na Mecânica, o objetivo é determinar as relações do movimento com suas causas e efeitos. A fı́sica
busca as propriedades ou grandezas associadas aos corpos pertinentes ao fenômeno.
Aplica se o método cientı́fico que é composto basicamente das etapas
1. (a) observação
(b) abstração
(c) experimentação
7
8
1.1
CAPÍTULO 1.
INTRODUÇÃO
Mecânica
Toda grandeza fı́sica é uma caracterı́stica que pode ser definida e medida para obter as relações das
variáveis de interesse no problema tratado.
Medir significa comparar com um padrão previamente estabelecido. Vários sistemas foram estabelecidos durante a história. Imposições técnicas e históricas obrigam nos dias atuais a utilização de um
sistema originado junto com a Revolução Francesa e baseado nos múltiplos e submúltiplos decimais
das unidades originais.
1.2
Sistema Internacional de Unidades
O Sistema Internacional de Unidades estabelece sete unidades básicas correspondentes as magnitudes
das seguintes grandezas: massa, tempo, corrente elétrica, temperatura, quantidade de matéria e
intensidade luminosa. Suas unidades são conhecidas, respectivamente, por: metro, o kilograma, o
segundo, o ampère, o kelvin, o mol e candela.
Para as unidades de base adotadas pela Conferencia General de Pesos e Medidas, são estabelecidas
as seguintes definições:
Unidade de comprimento
O metro é o comprimento da distância percorrida pela luz no vácuo, durante um intervalo de 1/299
792 458 do segundo.
Unidade de massa
O quilograma é igual à massa do protótipo internacional do quilograma.
Unidade de tempo
1.2. SISTEMA INTERNACIONAL DE UNIDADES
9
O segundo é a duração de 9 192 631 770 perı́odos da radiação correspondente à transição entre os
dois nı́veis hiperfinos do estado fundamental do átomo de césio 133.
A tabela indica algumas unidades fundamentais e respectivos sı́mbolos:
Grandeza
Comprimento
Massa
Tempo
1.2.1
Unidade
Nome
metro
kilogramo
segundo
Sı́mbolo
m
kg
s
Sistema de Unidades
A partir das unidades básicas e suplementares pode-se derivar outras; algumas de estas tem nome
próprio, como se mostra na tabela seguinte:
Unidades derivadas que não tem nome próprio
Grandeza
Velocidade
Aceleração
Vazão
sı́mbolo unidades
v
ms-1
a
ms-2
m3s-1
Unidades derivadas que tem nome próprio
10
CAPÍTULO 1.
Grandeza
INTRODUÇÃO
Sistema Interna- sı́mbolo unidades
cional
Newton
N
kg ms−2
Joule
J
kg
m2 s−2
Watt
W
kg
m2 s−3
Força
Energia
Potência
Muitas medidas exigem subunidades que normalmente são indicadas por prefixos relativos a fração
da unidade principal:
fração
sı́mbolo
nome
1.3
10− 6
10−3 Unidade
mental
µ
m
Micro mili
Funda-
103
106
k
Kilo
M
Mega
Exemplo: Transformação de unidades
Um carro de F1 tem velocidade média de 180 km/h. ou
180 km
180 103 m
180 · 1000 m
m
=
=
= 50
1 h
1 3600s
1 · 3600 s
s
. Ou seja a cada segundo o carro anda 50m.
1.4. EXERCÍCIOS
1.4
Exercı́cios
1. Faça as seguintes transformações
(a) 50 km para cm
(b) 5 cm para m
(c) 50 cm para km
2. Faça as seguintes transformações
(a) 72 km/h para m/s
(b) 25 m/s para km/h
(c) 300.000km/s para km/h
3. Faça as seguintes transformações
(a) 100 kg para g
(b) 25 Tonelada para kg
(c) 250 g para kg
11
12
CAPÍTULO 1.
INTRODUÇÃO
Capı́tulo 2
Sistema cartesiano
A necessidade de localizar objetos para a descrição de certa situação impõe o surgimento de vários
tipos de sistema. O mais conhecido é o Sistema Cartesiano. É um procedimento matemático simples
é para um ponto genérico P = (x, y, z)
O sistema tridimensional é o conjunto de todos os ternos ordenados (x,y,z), com esta ordem
devendo ser obedecida para não haver confusão, fig. 1. Reduções para sistema bidimensionais e
unidimensionais são óbvias, com a simples retirada da coordenada desconsiderada.
com x indicando o deslocamento na direção do eixo OX
y indicando o deslocamento na direção do eixo OY
z indicando o deslocamento na direção do eixo OZ
13
14
CAPÍTULO 2. SISTEMA CARTESIANO
Figura 2.1: Sistema cartesiano î, ĵ, k̂
2.1
Vetores
Uma grandeza fı́sica é vetorial quando necessitarmos de 3 informações para caracterizá-la: módulo
ou intensidade, direção e sentido.
A representação gráfica de um vetor é dada por, fig. 1b :
Uma grandeza vetorial tı́pica é o deslocamento, pois é necessário determina quanto deslocou-se
para que direção e em que sentido (indo ou vindo)
Assim o problema inicial de vetores é como obter sua combinação ou adição para visualizar o
valor resultante de cada um dos componentes. Vários casos podem ficar relacionados em grupos bem
definidos. E algumas das caracterı́sticas dos vetores devem ser melhor exploradas para o completo
entendimento.
2.2. COMPONENTES DE UM VETOR
Figura 2.2: Representação gráfica de um vetor
2.2
Componentes de um vetor
Notação vetorial
~ ~
X,Y dois vetores quaisquer
~
X intensidade ou módulo do vetor
Caso 1 Vetores na mesma direção
A adição de vetores que tenham mesma direção pode ser realizada facilmente, fig. 2, pois:
1. Vetores tem mesmo sentido
~ =X
~ + Y~ = X + Y , os módulos são somados.
Z
15
16
CAPÍTULO 2. SISTEMA CARTESIANO
Figura 2.3: Vetores alinhados
2. os vetores tem sentido contrário
~ =X
~ + Y~ = X − Y , os módulos são subtraidos.
Z
Caso 2 Vetores em direção distinta
Considere a situação da figura 12.3. Obviamente não podemos fazer a composição dos dois vetores,
pois apresentam-se em direções distintas.
A idéia é realizar transformações para obter componentes na mesma situação. Para isso considere
a situação com apenas um vetor como indicado na figura 3.
Considerando o sistema cartesiano, poderı́amos representar a parte do vetor projetada no eixo X
e a outra projeção no eixo Y, fig. 3. Através das definições trigonométricas podemos estabelecer.
As componentes verticais e horizontais do vetor v são dadas por:
vx = v cos θ na horizontal
vy = vsinθ na vertical
2.2. COMPONENTES DE UM VETOR
17
Figura 2.4: Vetores não alinhados
E realizando este processo para cada um dos vetores, obterı́amos vetores em duas direções preferenciais: a horizontal e vertical. Com esses vetores parciais poderı́amos realizar a soma de vetores
como no caso de vetores de mesma direção.
Exemplo
Representar graficamente os vetores:
1. v1: módulo 9 cm; direção de 45◦ em relação a horizontal
2. v2: módulo 5 cm ; direção de 90◦ em relação a horizontal
18
CAPÍTULO 2. SISTEMA CARTESIANO
Figura 2.5: Componentes de um vetor
3. v3: módulo 2 cm; direção de 0◦ em relação a horizontal.
O sentido fica determinado pois todos os vetores tem começo na origem do sistema cartesiano.
Solução:
Primeiro estabelece-se o sistema cartesiano
2.3
Exercı́cios
1. Representar graficamente os vetores:
(a) v1: módulo 5 cm; direção de 60◦ em relação a horizontal (em sentido anti horário)
2.3. EXERCÍCIOS
19
Figura 2.6: Representação cartesiana
20
CAPÍTULO 2. SISTEMA CARTESIANO
(b) v2: módulo 9 cm ; direção de 45◦ em relação a horizontal (em sentido anti horário)
(c) v3: módulo 3 cm; direção de 30◦ em relação a horizontal. (em sentido anti horário)
2. Representar graficamente os vetores
(a) v1: módulo 3 cm; direção de 120◦ em relação a horizontal (em sentido anti horário)
(b) v2: módulo 5 cm ; direção de 90◦ em relação a horizontal (em sentido anti horário)
(c) v3: módulo 3 cm; direção de 30◦ em relação a horizontal. (em sentido anti horário)
3. Representar graficamente os vetores
(a) v1: módulo 2 cm; direção de 250◦ em relação a horizontal (em sentido anti horário)
(b) v2: módulo 4 cm ; direção de 120◦ em relação a horizontal (em sentido anti horário)
(c) v3: módulo 6 cm; direção de 60◦ em relação a horizontal. (em sentido anti horário)
4. Representar graficamente os vetores
(a) v1: módulo 6 cm; direção de 330◦ em relação a horizontal (em sentido anti horário)
(b) v2: módulo 4 cm ; direção de 270◦ em relação a horizontal (em sentido anti horário)
(c) v3: módulo 2 cm; direção de 170◦ em relação a horizontal. (em sentido anti horário)
Capı́tulo 3
Composição de vetores
Significa que a partir de uma série de vetores queremos obter um vetor que faça a representação de
todos os vetores envolvidos. Pense como várias pessoas puxando um objeto para distintas direções.
Queremos determinar que força (módulo, direção e sentido) uma única pessoa deveria realizar para
substituir todas as pessoas iniciais. Para entender o processo uma análise gráfica é útil:
3.1
Método da Poligonal
Quando houver mais de dois vetores, podemos determinar graficamente a resultante através do
seguinte método:
Escolhemos um vetor qualquer.
Deslocamos os outros vetores de tal modo que o inı́cio do vetor se encaixará no final do último
21
22
CAPÍTULO 3. COMPOSIÇÃO DE VETORES
vetor deslocado. Veja a ilustração 1:
3.1.1
Cálculo das componentes dos vetores
Para obter a resultante dois vetores quaisquer faremos uma combinação das duas idéias: a obtenção
das componentes horizontal e vertical e a adição de vetores de mesma direção.
Como exemplo considere a situação abaixo, figura 1b:
Componentes horizontais.
v1x = v1 cos θ
v2x = v2 cos β
Componentes verticais.
v1y = v1 sinθ
v2y = v2 sinβ
Adicionamos vetorialmente as componentes encontradas, encontrando as resultantes horizontais
e verticais.
vx = v1x + v2x = v1 cos θ + v2 cos β, pois tem o mesmo sentido.
vy = v1y − v2y = v1 sinθ − v2 sinβ, pois tem sentido contrário.
Determinação do vetor resultante
3.1. MÉTODO DA POLIGONAL
Figura 3.1: Método da Poligonal
23
24
CAPÍTULO 3. COMPOSIÇÃO DE VETORES
Figura 3.2: Cálculo das componentes dos vetores
3.2. EXERCÍCIOS
25
Figura 3.3: Determinação do vetor resultante
Usamos as relações métricas (Pitágoras) e trigonométricas (tangente) para determinar o finalmente
o vetor resultante, figura 2.
vr =
q
vx2 + vy2
θ = arctan
v y
vx
Obs.:O ângulo é determinado a partir da horizontal e no sentido contrário ao movimento dos ponteiros
de um relógio. Assim o sentido será implicitamente indicado.
3.2
Exercı́cios
1. Calcule graficamente a resultante dos vetores:
(a) Figura 12.3
26
CAPÍTULO 3. COMPOSIÇÃO DE VETORES
Figura 3.4: Exercı́cio 12.3
3.2. EXERCÍCIOS
27
(b) Figura 3
Figura 3.5: Exercı́cio 3
2. As projeções de um vetor sobre os eixos 0x e 0y valem respectivamente 3cm e 4cm. Achar o
módulo desse vetor e sua direção, determinando o ângulo que forma com Ox.
3. Qual o módulo de um vetor cujas projeções sobre 0x e 0y valem 6 e 15 respectivamente?
28
CAPÍTULO 3. COMPOSIÇÃO DE VETORES
4. Dados os vetores abaixo, caracterizados pelo módulo e pelo ângulo que formam com Ox, determinar a resultante dos vetores. Verificar graficamente a solução, fig. 4.
(a) v1: módulo 5 cm; direção de 60◦ em relação a horizontal (em sentido anti horário)
(b) v2: módulo 9 cm ; direção de 45◦ em relação a horizontal (em sentido anti horário)
(c) v3: módulo 3 cm; direção de 30◦ em relação a horizontal. (em sentido anti horário)
Figura 3.6: Exercı́cio 4
3.2. EXERCÍCIOS
29
5. Dados os vetores abaixo, caracterizados pelo módulo e pelo ângulo que formam com Ox, determinar a resultante dos vetores. Verificar graficamente a solução. Representar graficamente
os vetores, fig. 5
(a) v1: módulo 3 cm; direção de 120◦ em relação a horizontal (em sentido anti horário)
(b) v2: módulo 5 cm ; direção de 90◦ em relação a horizontal (em sentido anti horário)
(c) v3: módulo 3 cm; direção de 30◦ em relação a horizontal. (em sentido anti horário)
30
CAPÍTULO 3. COMPOSIÇÃO DE VETORES
Figura 3.7: Exercı́cio 5
Capı́tulo 4
Álgebra Vetorial
4.1
Vetores EM Rn
Há uma extensão natural dos conceitos, notações e operações definidas para o espaço Rn.
4.2
Operação com Vetores
31
32
CAPÍTULO 4. ÁLGEBRA VETORIAL
4.2.1
Adição de Vetores
Dados u = (u1 , u2 , u3 , · · · , un ) e ~v = (v1 , v2 , v3 , · · · , vn ), de Rn , a soma s = u + v, tal que
s = (u1 + v1 , u2 + v2 , u3 + v3 , · · · , un + vn )
A adição de vetores goza das seguintes propriedades:
1. ~u + ~v = ~v + ~u
2. (~u + ~v ) + w
~ = ~u + (~v + w)
~
3. ~0 = (0, 0, 0, · · · , 0), tal que ~0 + ~v = ~v + ~0 = ~v .
4. ~v + −~v = −~v + ~v = ~0.
4.2.2
Multiplicação por escalar
Dados ~v = (v1 , v2 , v3 , · · · , vn ) ∈ Rn e o escalar r ∈ R . O produto do escalar r pelo vetor v, é o
resultado
r~v = (rv1 , rv2 , rv3 , · · · , rvn )
A multiplicação de um escalar por um vetor goza das propriedades:
1.
r~v = ~v r
2. r(~u + ~v ) = r~u + r~v
3.
(r + s)~v = r~v + s~v .
4.3.
PRODUTO ESCALAR
4.
(rs)~v = r(s~v )
5.
0~v = ~0
6.
−1~v = −~v
7.
4.3
33
r~v é paralelo a ~v
Produto Escalar
Dados ~u = (x1 , y1 , z1 ) e ~v = (x2 , y2 , z2 ) dois vetores, com um ângulo θ entre si.
Figura 4.1: Produto Escalar
O produto escalar de ~u por ~v , simbolizado por ~u · ~v , é definido por:
~u · ~v = |~u| · |~v |.cosθ
34
CAPÍTULO 4. ÁLGEBRA VETORIAL
Na forma de coordenadas
~u · ~v = x1 · x2 + y1 · y2 + z1 · z2
É usado em muitas situações fı́sicas, como por exemplo o trabalho, definido como o produto da
força pelo deslocamento. Força e deslocamento são duas grandezas vetoriais e levam a noção de
trabalho, uma grandeza escalar.
Exemplo
Calcule o produto escalar para
1. ~u = (2, 3, 4) ~v = (−1, 3, 5)
2. ~u = (2, −1, 1) e ~v = (5, 2, −1)
4.3.
PRODUTO ESCALAR
4.3.1
Propriedades Do Produto Escalar
Para o produto escalar valem as propriedades:
1. ~u · ~v = ~v · ~u
2. ~u · (~v + w)
~ = ~u · ~v + ~u · w
~
3. ~u · ~v = 0 ⇔ ~u⊥~v
4. s(~u · ~v ) = (s~u) · ~u
4.3.2
Exercı́cios
1. Dado os vetores ~u = 3î − 2ĵ + 5k̂ , ~v = −5î + 6ĵ − 3k̂ e w
~ = −1î + 2ĵ − 3k̂, calcule:
(a) ~u · ~v
(b) w
~ · u~
(c) 3~u · 2w
~
(d) (2~u − 1~v ) · (5w)
~
(e) (~u + ~v ) · (w
~ + 5~u)
(f) ~u · (~v − (~u · ~v )w)
~
35
36
CAPÍTULO 4. ÁLGEBRA VETORIAL
Figura 4.2: Interpretação do Produto Escalar
4.3.3
Significado geométrico
Pode ser dada uma interpretação geométrica para o produto escalar, ~u · ~v | , através da figura.
Os vetores ~u, ~v mantêm entre si um ângulo θ indicada pela própria definição de produto escalar
~u · ~v = |~u||~v | cos(θ)
A interpretação fica claro quando observa-se:
~u · ~u = |~u| |~u| cos(θ)
|
{z
}
~u · ~v = |~v |proj~v ~u
Assim o produto escalar determina o tamanho da projeção de um vetor sobre outro.
4.4.
4.4
VETOR UNITÁRIO NUMA DIREÇÃO DADA
37
Vetor Unitário numa direção dada
Um vetor unitário é dado por w
~ = |w|.ŵ, ou seja,
ŵ =
w
~
|w|
Exemplo: Para w
~ = (3, 4, −12) , calcular ŵ
Vetores unitários coincidem suas direções com as direções positivas dos eixos cartesianos para
formar uma base.
4.5
Exercı́cios
1. Escreva o vetor unitário na direção de:
(a) (3, 4, 5)
(b) (-8, 6, 0)
(c) (1, 2, 3)
(d) (-3, 2, -4)
~ + 2v,
~ se ~u = 3î − 2ĵ + 5k̂ e
2. Determine o vetor w
~ e seu correspondente unitário tal que w
~ = 3u
~v = −5î + 6ĵ − 3k̂
3. Calcule o módulo de ~u + ~v , se:
38
CAPÍTULO 4. ÁLGEBRA VETORIAL
(a) se ~u = 3î − 2ĵ + 5k̂ e ~v = −5î + 6ĵ − 3k̂
(b) se ~u = 1î − 4ĵ + 3k̂ e ~v = −3î + 2ĵ − k̂
(c) se ~u = 1î − 1ĵ + k̂ e ~v = −3î + 2ĵ − k̂
4. Calcule o vetor unitário do exercı́cio anterior.
4.6
Produto Vetorial
Produto vetorial é a multiplicação de dois vetores, com um vetor como resultado. O produto vetorial
de u por v é indicado por ~u × ~v
Figura 4.3: Produto Vetorial
4.6.
PRODUTO VETORIAL
39
O produto vetorial é definido por:
~u × ~v = |u|.|v|.senθ
Matricialmente pode ser calculado pelo por:
î ĵ k̂ ~u × ~v = x1 y1 z1 x2 y2 z2 Desenvolvendo
~u × ~v = (y1 · z2 − y2 · z1 )î − (x1 · z2 − y2 · z1 )ĵ + (x1 · y2 − y2 · z1 )k̂
Assim o resultado do produto vetorial é caracterizado por:
1. MÓDULO: |u|.|v|.senθ, onde θ é o ângulo formado pelos dois vetores.
2. DIREÇÃO:- perpendicular ao plano formado por u e v.
3. SENTIDO:- determinado pela regra da mão direita, formando um plano, aponta-se o primeiro
vetor com o polegar. Os demais dedos apontam o segundo vetor. A palma da mão indicará o
sentido do produto. conforme figura:
40
CAPÍTULO 4. ÁLGEBRA VETORIAL
Figura 4.4: Regra da Mão Direita
4.6.1
Propriedades do Produto Vetorial
Para o produto vetorial valem as propriedades:
1. ~u × ~v = −~v × ~u
2. ~u × ~v = 0 ⇔ ~u = r~v ⇔ ~u k ~v
3. s(~u × ~v ) = (s~u) × ~u
4. (~u × ~v ) × w
~ = −~u × (~v × w)
~
4.6.2
Exercı́cios
1. Prove com um exemplo que o produto vetorial não é comutativo e nem associativo
4.6.
PRODUTO VETORIAL
2. Dado os vetores ~u = 3î − 2ĵ + 5k̂ , ~v = −5î + 6ĵ − 3k̂ e w
~ = −1î + 2ĵ − 3k̂, calcule:
(a) ~u × w~
(b) w
~ × v~
(c) ~u × (~v + w)
~
(d) (~u × ~v ).w
~
(e) (2~u + ~v ) × 3w
~
(f) (~u + 2w)
~ × (~u − 4~v )
(g) ~u × (w
~ × ~v )
(h) (~u × ~v ) × w~
(i) (w
~ × ~u) × v~
3. Determine um vetor que seja perpendicular ao plano formado pelos vetores:
(a) ~u × w~ e (w
~ × ~u) × v~
(b) w
~ × v~ e (~u + 2w)
~ × (~u − 4~v )
(c) ~u × (~v + w)
~
e (~u × ~v ) × w~
(d) (~u × ~v ).w
~
ew
~ × v~
(e) (2~u + ~v ) × 3w
~ e ~u × w~
41
42
CAPÍTULO 4. ÁLGEBRA VETORIAL
4.6.3
Significado geométrico
Pode ser dada uma interpretação geométrica para o comprimento do produto vetorial, |~a ×~b|, através
da figura.
Figura 4.5: Interpretação do produto vetorial
Como
|~u × ~v | = |~u||~v |senθ
|~u × ~v | = |~u|h
Assim o módulo do produto vetorial dá a área do paralelogramo definido pelos vetores ~u e ~v .
Exercı́cios Extras
1. Prove que ~u · ~v = ~v · ~u e (~u · ~v ) · w
~ = ~u · (~v · w)
~
2. Prove, mediante um exemplo que o produto vetorial não é comutativo e nem associativo
4.6.
PRODUTO VETORIAL
43
3. Sejam ~u = (1, 2, 3), ~v = (−4, 2, −1)e w
~ = (1, −2, −1). Calcule:
(a) ~u · ~v
(b) ~u × w
~
(c) (~u · ~v ) · w
~
(d) ~u × (~v · w)
~
(e) (~u × ~v ) · w
~
(f) 2~u × 3w
~
(g) ~u · 2w + 3~u · 4~v
(h) ~u × (w
~ × ~v )
(i) (~u × w)
~ × ~v
(j) 2~u · 3w
~
(k) ~u · (~v · w)
~
(l) ~u × (~v · w)
~
4. Determine um vetor que seja perpendicular ao plano formado pelos vetores ~v = (3, −4, −6) e
w
~ = (8, 5, 0)
5. Calcule o módulo de (3, −4, −6) × (8, 5, 0)
6. Sabe-se que o vetor (3, 6, -7) é paralelo ao vetor (3x, y + 2, 21). Calcule os valores de x e y
44
CAPÍTULO 4. ÁLGEBRA VETORIAL
VETORES
~ = C̄ D,
~ sendo A (x,1), B(4,x+3), C(x,x+2) e D(2x,x+6).
7. Determine x para que se tenha ĀB
8. Escreva o vetor (7,-1), como a soma de dois vetores, um paralelo ao vetor (1,-1) e outro paralelo
ao vetor (1,1).
9. Dados A(-1,-1) e B(3,5), determinar C, tal que
~
~ = 1 AB
(a) AC
2
~
~ = 2 AB.
(b) AC
3
10. Dados os vetores ~a = (2, −1) e ~b = (1, 3) , determinar um vetor ~c, tal que:
(a) 23 ~c +
1
2
h
i
2(~c + ~a) − ~b =
~a+~c
2
a
(b) 4~a − 2~c = 31~b − ~c+~
2
11. Dados os vetores ~a = (−1, 1, 2) e ~b = (2, 0, 4), determine ~v , tal que:
h
i
~a−~v
2
h
i
~b
4
(a)
2~v
3
− 2 (~v + ~a) − ~b =
(b)
2
~v
3
− 2 (~v + ~a) − ~b =
a
− ~v−~
2
12. Sejam√os pontos M (1, −2, −2) e P (0, −1, 2) , determine um vetor ~v colinear à P~M e tal que
|~v | = 3.
4.6.
PRODUTO VETORIAL
45
13. Achar um vetor ~x de módulo igual a 8 e de mesmo sentido que o vetor ~v = 6î − 2ĵ + k̂.
14. Dados ~a = î + 2ĵ − 3k̂ e ~b = 2î + ĵ − k̂. Determine um versor dos vetores abaixo:
(a) ~a + ~b
(b) 2~a − 3~b
(c) 5~a + 4~b
PRODUTO ESCALAR
15. Sendo ~u = (2, 3, 1) e ~v = (1, 4, 5) . Calcular:
(a) ~u · ~v
(b) (~u − ~v )
(c) (~u + ~v )2
(d) (3~u − 2~v )2
(e) (2~u − 3~v ) · (~u + 2~v )
16. Sendo ~a = (2, −1, 1) , ~b = (1, 2, −2) e ~c = (1, −1, 1). Calcular um vetor ~v = (x, y, z) , tal que
~v · ~a= 4, ~v · ~b= –9 e ~v · ~c= 5.
17. Sejam os vetores ~a=(2,–m,–3),~b=(m+3,4–m,1)e ~c=(m,–2,7).Determinar m para que ~a·~b=(~a+~b)·~c.
18. Determinar o valor de x para que os vetores ~v1 = x~i–2~j+3~k e ~v2 =2~i–~j+2~k, sejam ortogonais.
46
CAPÍTULO 4. ÁLGEBRA VETORIAL
19. Determine um vetor unitário ortogonal aos vetores ~a=(2,6,–1) e ~b=(0,–2,1).
−
~ onde A (0,3,4) e B(m,
20. O vetor →
v = (−1, −1, −2) forma um ângulo de 600 com o vetor ĀB,
−1,2). Calcular o valor de m.
21. Decomponha o vetor ~v =(–1,2,–3) em dois vetores ~ae ~b, tais que ~a//w
~ e ~b⊥w,
~ com w=(2,1,–1).
~
PRODUTO VETORIAL
22. Dados os vetores ~u=( –1,3,2),~v =(1,5,–2) e w=(-7,3,1).
~
Calcule as coordenadas dos vetores:
(a) ~u × ~v
(b) ~v × w
~
(c) ~v × (~u × w)
~
(d) (~v × ~u) × w
~
(e) (~u + ~v ) × (vecu + w)
~
(f) (~u − w)
~ ×w
~
→
−
−
23. Determinar o vetor ~v , sabendo que ele é ortogonal ao vetor →
a =(2,−3,1) e ao vetor b =(1,−2,3)
→
−
→
−
→
−
−
e que satisfaz a seguinte condição; →
v • ( i + 2 j − 7 k ) = 10.
24. Determine um vetor unitário ortogonal aos vetores ~v1 =(–1,–1,0) e~v2 =(0,–1–1).
√
~
Dos ~u encontrados,
25. Ache ~u tal que ||~u||=3 3e ~u é ortogonal a ~v =(2,3,−1) e a w=(2,−4,6).
qual forma ângulo agudo com o vetor (1,0,0).
4.6.
PRODUTO VETORIAL
47
√
26. Sendo ~v1 =(–2,1,–1) e ~v2 =(0,y,z), calcule y e z de modo que ||~v1 ×~v2 ||= 4 3 e que o vetor
~v =~v1 ×~v2 faça ângulos congruentes com os eixos OX e OY.
27. Dados os vetores ~u=(1,−1,1) e ~v =(2,−3,4), calcular:
(a) A área do paralelogramo de determinado por ~u e ~v ;
(b) a altura do paralelogramo relativa à base definida pelo vetor ~u
28. Dados os vetores ~u=(2,1,−1) e ~v =(1,−1,α),
√ calcular o valor de α para que a área do paralelogramo determinado por ~u e ~v seja igual a 62
48
CAPÍTULO 4. ÁLGEBRA VETORIAL
Capı́tulo 5
Estática
Um ponto material está em equilı́brio, quando for nula a resultante do sistema de forças a ele aplicado.
Isso significa geometricamente que os vetores devem fechar um polı́gono
Desse modo, para o estudo do equilı́brio do ponto material, é necessário:
1. Reconhecimento das forças atuantes
2. estabelecer um sistema cartesiano ortogonal, com origem no ponto material
3. Decomposição dos vetores representativos da força
4. Impor a condição de equilibrio:
X
Fx = 0
X
Fy = 0
49
50
CAPÍTULO 5. ESTÁTICA
Figura 5.1: Condição de equilibrio
51
Figura 5.2: Condição de equilibrio
52
CAPÍTULO 5. ESTÁTICA
X
Fz = 0
Para o caso da figura 5.1, adotando como referencial um sistema cartesiano
X
Fx = F1 cos(θ) − F3 = 0
X
Fy = F1 sen(θ) − F2 = 0
Portanto
F1 sen(θ) = F2
F1 cos(θ) = F3
Dividindo uma equação pela outra:
tan(θ) =
F2
F3
ou
Usando Pitágoras:
F1 2 = F2 2 + F3 2
5.1. EXERCÍCIOS
5.1
53
Exercı́cios
1. Determine a resultante das forças:
(a) Figura 1
Figura 5.3: 1
(b) Figura 1b
(c) Figura 2
(d) Figura 12.3
2. Uma força F de intensidade de 500N é decomposta em componentes cartesianas. Se sua componente horizontal vale 285N. Calcule a componente vertical e o ângulo de inclinação da força
dada.
54
CAPÍTULO 5. ESTÁTICA
Figura 5.4: 1b
Figura 5.5: 2
5.1. EXERCÍCIOS
55
Figura 5.6: 12.3
3. Uma estaca é arrancada do solo, figura 3:
(a) Para α = 30o e P = 60N, calcule a resultante, fig. 3.
(b) Para α = 30o calcule P para que a resultante horizontal seja nula
4. Calcule a resultante :
5. Calcule as trações das três cordas na situação para um P de 150 N.
6. O esquema representa um sistema em equilı́brio, fig. 19. Dado um peso de 30N para o corpo
A, calcule o peso do corpo B.
7. No sistema em equilı́brio, fig. 7 , o peso de A é 55 N. Calcule
56
CAPÍTULO 5. ESTÁTICA
Figura 5.7: Problema 3
Figura 5.8: Problema 4
5.1. EXERCÍCIOS
57
Figura 5.9: Problema 5
Figura 5.10: Problema 19
58
CAPÍTULO 5. ESTÁTICA
(a) peso de B
(b) A intensidade da força de tração no trecho 1
Figura 5.11: Problema 7
8. A esfera de raio R e peso 80N está pendurada na parede em equilı́brio, 12.10. Determinar
(a) A intensidade da tração na corda.
(b) A intensidade da força aplicada a parede.
9. Calcule a tração em cada trecho da corda,fig. 9:
10. O sistema está em equilı́brio, 10. Calcule a relação entre as massas.
5.1. EXERCÍCIOS
59
Figura 5.12: Problema 12.10
Figura 5.13: Problema 9
60
CAPÍTULO 5. ESTÁTICA
Figura 5.14: Problema 10
Capı́tulo 6
Movimento unidimensional de ponto
material
A cinemática trata do movimento unidimensional de uma partı́cula ou ponto material. A proposição
é uma simplificação eficiente de várias situações cotidianas. Como partı́cula ou ponto material,
não se pretende reduzir o tamanho dos corpos para diminutas dimensões. Neste caso não estamos
interessados na extensão do corpo nem em possı́veis rotações. Pode-se considerar um carro como um
ponto material se deslocando...
A condição de movimento unidimensional é apenas uma facilidade para a interpretação de conceitos
que serão desenvolvidos e generalizados para um movimento no espaço. Grandezas como deslocamento, velocidade e aceleração são grandezas vetoriais que descrevem os problemas tratados.
61
62
CAPÍTULO 6. MOVIMENTO UNIDIMENSIONAL DE PONTO MATERIAL
6.1
Sistema De Coordenadas
Para o estudo do movimento de um corpo é necessário o estabelecimento de um sistema de coordenadas no qual é possı́vel obter medidas das grandezas envolvidas.
É comum adotar um sistema cartesiano. Arbitra-se um ponto como origem e qualquer outro ponto
indica a medida da distância em relação a essa origem.
6.2
Definições Elementares
Considere a situação abaixo onde a bolinha desloca se pela linha. Para cada instante dado é possı́vel
determinar a posição da bolinha em relação a uma referencia inicial.
Figura 6.1: Trajetória de um objeto
É possı́vel estabelecer a seguinte relação:
6.2.
DEFINIÇÕES ELEMENTARES
Instante Posição Descrição
t=0
origem Posição da bola no instante inicial
da observação
t = tA dA
Posição, dA, da bola no instante,
tA.
t = tB dB
Posição, dB, da bola no instante
tB,.
t = tC dC
Posição, dC, da bola no instante,
tC.
t = tD dD
Posição, dD, da bola no instante,
tD.
Como é bastante comum também pode ser usada a seguinte notação
Instante
t0 = 0
t1 =
tA
t2= tB
Posição
d = x0
dA =
x1
dB =
x2
t3 = dC =
tC
x3
t4 =tD dD =
x4
63
64
CAPÍTULO 6. MOVIMENTO UNIDIMENSIONAL DE PONTO MATERIAL
6.3
Deslocamento, velocidade média e aceleração
Para discutir os conceitos, consideremos a situação do corpo em que foi determinada sua posição em
vários instantes.
Deslocamento
É a diferença entre as posições respectivas entre os instantes ou em relação ao instante inicial.
Genericamente
∆x = x2 − x1
ou
∆x = x2 − x0
A unidade no SI: metro. Múltiplos mais comuns: centı́metro, quilometro.
Velocidade média
É a razão do deslocamento efetuado pelo intervalo de tempo requerido, ou seja:
vm =
∆x
x2 − x1
=
∆t
t2 − t1
A unidade no SI: metro/segundo (m/s). Múltiplos mais comuns: km/h, km/s.
6.3. DESLOCAMENTO, VELOCIDADE MÉDIA E ACELERAÇÃO
65
Aceleração
Mede a variação da velocidade no tempo observado:
a=
∆v
v2 − v1
=
∆t
t2 − t1
A unidade no SI: metro/segundo2 (m/s2). Múltiplos mais comuns: cm/s2.
Exemplo:
Numa corrida de fórmula 1, a volta mais rápida foi feita em 1min e 20 s, a uma velocidade média de
180 km/h. Qual o comprimento da pista?
Solução:
Dados do problema
Intervalo de tempo: 1min e 20 s = 60s+20s = 80s
velocidade média:
180
1000 m
180 · 1000 m
m
km
= 180
=
= 50
h
3600s
1 · 3600 s
s
A conversão foi necessária para manter a consistência das unidades.
Como
vm =
∆x
m
⇒ ∆x = vm ∆t = 50 · 80s = 4000m = 4km
∆t
s
Assim a pista tem 4km de extensão.
66
CAPÍTULO 6. MOVIMENTO UNIDIMENSIONAL DE PONTO MATERIAL
6.4
Exercı́cios
1. As 15h00min um caminhão inicia uma viagem no marco 120 km de uma estrada. As 16h15min
o caminhão passa pelo marco 250 km. Determine:
(a) O deslocamento do caminhão
(b) O tempo percorrido
(c) A velocidade média
2. Um nadador percorre a extensão de uma piscina de 50m em 25s. Determine a velocidade média
do nadador.
3. Um passageiro observou que o ônibus percorreu 10 km nos dez primeiros minutos e mais 9 km
nos 10 minutos seguintes. Qual a velocidade média do ônibus?
4. Uma partı́cula parte do repouso, e em 10 s, sua velocidade aumenta para 15m/s. Qual a
aceleração média da partı́cula?
5. Um motorista aumenta a velocidade de um ônibus de 60 km/h para 78 km/h em 10 s. qual é
a aceleração média do ônibus?
Capı́tulo 7
Cinemática
Estudo das trajetórias dos objetos do sistema. O objetivo é responder a basicamente duas questões:
Qual a posição de uma partı́cula em um instante qualquer?
Qual a velocidade respectiva neste instante?
Escrever as equações horárias do movimento é responder estas duas questões de forma plena.
O movimento pode ser caracterizado de diversas formas. Em cinemática, caracterizar a velocidade
é suficiente, lembrando que v = ∆s/∆té possı́vel determinar a posição da partı́cula com uma simples
transposição.
A grandeza que mede a variação da velocidade é a aceleração a = ∆v/∆t. Assim é a partir da
observação da aceleração que pode-se definir o tipo de movimento.
O resultado são equações que envolve a posição, a velocidade e a aceleração da partı́cula em instantes
particulares.
Os tipos mais comuns de movimento são:
67
68
CAPÍTULO 7.
CINEMÁTICA
1. O movimento retilı́neo uniforme, quando a aceleração do movimento é nula
2. O movimento retilı́neo uniformemente variado, quando a aceleração do movimento é constante
Todas as definições dadas se referem ao movimento em apenas uma dimensão, quando as caracterı́sticas vetoriais das grandezas envolvidas não se apresentam.
7.1
Movimento Retilı́neo Uniforme MRU
Neste tipo de movimento, a aceleração é nula. Pela definição, tem-se:
∆v
= 0 = a ⇒ ∆v = 0
∆t
ou seja a velocidade não varia, portanto v = v0
que é a velocidade inicial da partı́cula.
Ainda pela definição
v = ∆s/∆t
∆s = v∆t
s − s0 = v (t − t0 )
s = s0 + vt
pois normalmente o instante inicial é dado como zero.
Assim as equações horárias do Movimento Retilı́neo Uniforme são:
7.1.
MOVIMENTO RETILÍNEO UNIFORME MRU
a = 0
v = v0
s = s0 + vt
69
(7.1)
Exemplo
1. Dois pedestres partem de diferentes pontos. Percorrem a mesma trajetória, obedecendo as
seguintes funções, no SI: s1(t) = 10 + 4t e s2(t)= 20 +2t.
(a) Determine a posição dos dois ciclistas em t = 4s.
(b) Determine o instante de encontro.
(c) Determine a posição de encontro.
Solução
Da funções horárias dadas, basta obter a posição para t = 4s.
s1(t) = 10 + 4t
s1(t= 4s) = 10 + 4*4=10 + 16 = 26 m. A posição do primeiro ciclista.
s2(t)= 20 +2t
s2 (t= 4s) = 20 + 2*4=10 + 8 = 28 m. A posição do primeiro ciclista.
O instante de encontro é dado quando:
70
CAPÍTULO 7.
CINEMÁTICA
s1(t) = s2(t)
10 + 4t = 20 +2t
4t-2t = 20 – 10
2t = 10
t = 5s
que é o instante de encontro dos dois ciclistas.
A posição de encontro é obtida aplicando a uma das duas equações dadas o instante t = 5s. Assim
s1(t) = 10 + 4t
s1(5) = 10 + 4*5
s1(5) = 30 m
Só confirmando s2(t)= 20 +2t
s2(5)= 20 +2*5
s2(5)= 30 m
7.2
Exercı́cios
1. Dois pedestres partem de diferentes pontos. Percorrem a mesma trajetória, obedecendo as
seguintes funções, no SI: s1(t) = 20 + 4t e s2(t)= 100 +2t.
(a) Determine a posição dos dois pedestres em t = 5s
(b) Determine o instante de encontro
(c) Determine a posição de encontro.
(d) Determine a distância inicial entre os dois
7.2.
EXERCÍCIOS
71
2. Durante um nevoeiro, um navegador recebe dois sinais transmitidos simultaneamente por um
posto na costa: um através do ar e outro através da água. Entre as recepções decorre um
intervalo de tempo t = 5s. Nas condições da experiência, a velocidade do som é de 340 m/s no
ar e de 1504 m/s na água.
(a) Escreva a equação horária para os dois movimentos
(b) Determine a distância entre o barco e o posto emissor
3. Num dado instante, dois ciclistas estão distanciados 60m. Eles percorrem a mesma trajetória,
obedecendo as seguintes funções: s1 = 20 + 2t e s2 = -40 +3t.
(a) Determine o instante de encontro.
(b) Determine a posição de encontro em relação à origem
(c) Determine o instante em que o mais rápido estará 60m a frente
4. Uma partı́cula está em x = 5m, quando t = 0s; em x = -7m quando t = 6s, e em x = 2m,
quando t = 10s. Determinar a velocidade média nos intervalos
(a) De 0s a 6s
(b) De 6s a 10s
(c) De 0s a 10s
5. Um automóvel roda em linha reta com a velocidade média de 96,5 km/h durante duas horas e
meia, e depois com a velocidade média de 49,3 km/h durante uma hora e meia.
72
CAPÍTULO 7.
(a) Qual o deslocamento total durante as quatro horas.
(b) Qual a velocidade média durante toda a viagem.
CINEMÁTICA
Capı́tulo 8
Movimento Retilı́neo Uniformemente
Variado
Outro tipo de movimento bem caracterizado é o movimento retilı́neo uniformemente variado MRUV.
Neste caso a partı́cula observa uma variação de velocidade constante, o que quer dizer uma aceleração
constante.
Da mesma forma que no MRU, o objetivo é determinar a posição e velocidade da partı́cula em
qualquer instante, especificando a sua equação horária.
Da definição de aceleração
73
74
CAPÍTULO 8. MOVIMENTO RETILÍNEO UNIFORMEMENTE VARIADO
a = ∆v
∆t
∆v = a∆t
v − v0 = a (t − t0 )
v = v0 + at
Esta é a equação horária para a velocidade, com a consideração que t0 = 0, o instante inicial de
observação.
A obtenção da equação da posição na partı́cula envolve uma manipulação algébrica que não será
mostrada. A fórmula resultante é:
s = s0 + v0 t +
at2
2
Assim a equação horária para o MRUV é dada pelas seguintes fórmulas:
a = constante
v = v0 + at
s = s0 + v0 t +
at2
2
com
s0 posição inicial
v0 velocidade inicial
a aceleração do sistema
t tempo
Para completar essas equações, uma fórmula bastante usada é a equação de Torricelli, que relaciona as grandezas: posição, velocidade e aceleração entre si desconsiderando o tempo:
75
v 2 = v02 + 2a∆s
Exemplo
1. Um objeto realiza um MUV com equação horária s = 18 − 9t + t2 .
(a) Qual o espaço inicial, a velocidade inicial e a aceleração do movimento?
(b) Qual a equação horária da velocidade?
(c) Qual o instante em que o móvel muda de sentido?
(d) O móvel passa pela origem da trajetória?
(e) Construa o gráfico sxt e vxt
Solução
1. (a) Espaço inicial, a velocidade inicial e a aceleração do movimento
Da equação horária dada, tem-se:
s = s0 + v0 t +
at2
2
s = 18 − 9t + 1t2
2
s = 18 − 9t + 2t2
Assim s0 = 18m
v0 = −9m/s
a = 2m/s2
76
CAPÍTULO 8. MOVIMENTO RETILÍNEO UNIFORMEMENTE VARIADO
(b) A equação horária da velocidade é v = v0 + at
Assim v = −9 + 2t é a equação horária da velocidade
(c) Para móvel mudar de sentido ele deve parar e retornar pela mesma trajetória. Parar
significa ter velocidade zero. Usando assim a equação da velocidade
v = −9 + 2t
0 = −9 + 2t
2t = 9
E este t =
9
2
= 4, 5s é o instante que o móvel começa o retorno.
(d) O móvel passa pela origem da trajetória quando s = 0. usando a equação de posição,
s = 18 − 9t + 1t2
tem-se:
0 = 18 − 9t + 1t2
Usando a fórmula de Baskara para resolver esta equação, tem-se:
Logo t = 3s ou t = 6s são os instantes em que a partı́cula passa pela origem.
(e) Os gráficos
8.1.
8.1
EXERCÍCIOS
77
Exercı́cios
1. Um objeto realiza um MUV com equação horária s = 20 − 10t + 2t2 .
(a) Qual o espaço inicial, a velocidade inicial e a aceleração do movimento?
(b) Qual a equação horária da velocidade?
(c) Qual o instante em que o móvel muda de sentido?
(d) O móvel passa pela origem da trajetória?
(e) Construa o gráfico sxt e vxt
2. Um automóvel partindo do repouso acelera a 3 m/s2 constantemente.
(a) Escreva a equação da posição do automóvel
(b) Escreva a equação da velocidade do automóvel
(c) Determine o instante em que a velocidade do automóvel é de 72 km/h
(d) O móvel passa pela origem da trajetória?
(e) Construa o gráfico sxt e vxt
3. Um automóvel está parado num sinal luminoso. Quando o sinal abre, ele começa a se movimentar com aceleração constante de 4 m/s2. No mesmo instante passa por ele outro com velocidade
constante de 10m/s. Determine:
(a) Em quanto tempo, após a abertura do sinal, o primeiro carro alcança o segundo.
78
CAPÍTULO 8. MOVIMENTO RETILÍNEO UNIFORMEMENTE VARIADO
(b) Qual a distância percorrida até o encontro.
(c) A velocidade do primeiro carro no instante do encontro.
4. Um automóvel desloca-se com a velocidade de 20 m/s. A partir do instante t = 0, seu motorista
aplica os freios até o carro parar. Admitindo que a aceleração tenha módulo igual a 4 m/s2
e é constante, determine a distância percorrida pelo carro desde a aplicação dos freios até sua
parada.
Capı́tulo 9
Exercı́cios de Cinemática
1. Um corpo, caindo da nas proximidades da Terra, fica sujeito a uma aceleração de 10 m/s2. A
cada segundo acontece que:
(a) A velocidade do corpo aumenta 36 km/h
(b) O corpo percorre 100m
(c) A velocidade do corpo aumentou em 10m/s
(d) O corpo cai com a mesma velocidade
(e) A velocidade do corpo diminui 5m/s
2. Um automóvel de competição é acelerado de forma tal que sua velocidade em função do tempo
(t) é dada pela tabela.
79
80
CAPÍTULO 9.
t(s)
v(m/s)
5
20
10
50
EXERCÍCIOS DE CINEMÁTICA
15
60
(a) Calcule a aceleração média no intervalo de 5 a 10 s
(b) Calcule a aceleração média no intervalo de 10 a 15 s
(c) Calcule a aceleração média no intervalo de 5 a 15 s
3. Escreva a função horária da velocidade do MUV e esboce o gráfico de velocidade por tempo,
de um móvel com tabela horária dada por:
v(m/s) -5
t(s)
0
-3
1
-1
2
1
3
3
4
5
5
7
6
4. Um carro acelera, a partir do repouso, a 8m/s2.
(a) Qual a sua velocidade no instante t = 10s?
(b) Que distância percorreu depois de 10s?
(c) Qual a velocidade média nesse intervalo de tempo?
5. Uma partı́cula está em x = 5m, quando t = 0s; em x = -7m quando t = 6s, e em x = 2m,
quando t = 10s. Determinar a velocidade média nos intervalos
(a) De 0s a 6s
(b) De 6s a 10s
(c) De 0s a 10s
81
6. Um automóvel roda em linha reta com a velocidade média de 100 km/h durante três horas, e
depois com a velocidade média de 50 km/h durante uma hora e meia.
(a) Qual o deslocamento total durante as quatro horas.
(b) Qual a velocidade média durante toda a viagem.
7. A partir dado instante, dois ciclistas percorrem a mesma trajetória, obedecendo as seguintes
funções: s1 = 40 + 4t e s2 = −40 + 5t
(a) Determine o instante de encontro.
(b) Determine a posição de encontro em relação à origem.
(c) Calcule a velocidade média de ambos do instante inicial até o instante de encontro.
(d) Esboce o gráfico da distância entre os dois do instante inicial até o instante de encontro.
8. Um automóvel está a 30 km/h no instante t = 0 s. Ele é acelerado a razão de 180 km/h.s
(a) Qual a velocidade em t = 1 s?
(b) Qual a velocidade em t = 2 s?
(c) Qual a velocidade,em m/s, num instante qualquer?
9. A velocidade de uma partı́cula é dada na tabela abaixo:
t(s) 0
v(m/s)0
1
5
2
10
3
15
4
45
5
65
6
70
7
60
8
-30
9
-50
10
-55
11
-55
(a) Faça o gráfico de velocidade por tempo ligando os pontos com uma linha suave
82
CAPÍTULO 9.
EXERCÍCIOS DE CINEMÁTICA
(b) Indique os instantes em que a velocidade é máxima
(c) Indique os instantes em que a velocidade é mı́nima
(d) Indique os instantes em que a velocidade é nula
(e) Indique os instantes em que a velocidade é constante
(f) Indique os instantes em que a aceleração é positiva
(g) Indique os instantes em que a aceleração é negativa.
10. Um carro, partindo do repouso, num movimento com aceleração constante de 1m/s2, durante
5 segundos. Desliga-se então o motor e, devido ao atrito, o carro volta ao repouso com retardamento constante de 0,5 m/s2. Calcule:
(a) o percurso total do movimento
(b) o tempo total do movimento
11. Um objeto realiza um MUV com equação horária s = 18 − 9t + t2
(a) Qual o espaço inicial, a velocidade inicial e a aceleração do movimento?
(b) Qual a equação horária da velocidade?
(c) Qual o instante em que o móvel muda de sentido?
(d) O móvel passa pela origem da trajetória?
(e) Esboce o gráfico de espaço e velocidade.
83
12. Um móvel realiza um movimento uniformemente variado cuja função horária é dada por: s =
3 − 4t + 2t2
(a) Qual a velocidade e a aceleração média no instante t = 2s
(b) Qual o deslocamento no instante t = 2s.
(c) Qual a equação horária da velocidade?
(d) Quando o móvel passa pela origem?
(e) Qual o instante em que o móvel muda de sentido?
(f) Esboce o gráfico de espaço e velocidade.
13. Um automóvel está parado num sinal luminoso. Quando o sinal abre, ele começa a se movimentar com aceleração constante de 5 m/s2. No mesmo instante passa por ele outro com velocidade
constante de 15m/s.Determine:
(a) Em quanto tempo, após a abertura do sinal, o primeiro carro alcança o segundo.
(b) Qual a distância percorrida até o encontro.
(c) A velocidade do primeiro carro no instante do encontro.
(d) A velocidade média de ambos, da abertura do sinal até o encontro.
14. Um móvel parte do repouso com aceleração de 2 m/s2 no mesmo sentido de outro móvel de
velocidade constante de 6 m/s e distante do primeiro 8 m do primeiro. Determine:
(a) Qual tempo gasto até o encontro.
84
CAPÍTULO 9.
EXERCÍCIOS DE CINEMÁTICA
(b) Qual a distância percorrida até o encontro.
(c) A velocidade do primeiro móvel no instante do encontro.
(d) A velocidade média de ambos até o encontro.
15. Um trem de 150 m de comprimento atinge a boca de um túnel e depois de 40 s o atravessa
completamente. Sabendo que a velocidade do trem é de 72 km/h, calcule a extensão do túnel.
16. Dois pontos A e B, estão numa mesma reta e separados por uma distância d. Dois móveis
passam pelo ponto A, rumo a B, com velocidades constantes de 3m/s e 7m/s. O móvel mais
rápido leva dois segundos a menos que o mais lento para percorrer a distancia AB. Determine
a distância d.
17. Um trem sai da estação com velocidade constante de 50 km/h num percurso retı́lineo. Quanto
tempo depois de sua partida deverá sair, outro trem na mesma estação, com velocidade de 75
km/h para alcançá-lo a 120 km da estação?
18. Um veı́culo entra num túnel com velocidade de 54 km/h, deslocando num movimento uniformemente variado. Passados 10 s, o veı́culo sai com velocidade de 72 km/h. Qual o tamanho do
túnel?
19. Um trem de 100 m de comprimento, atravessa um túnel de 200m de comprimento, com MUV.
O trem entra com velocidade escalar de 14 m/s e sai completamente dele com velocidade escalar
de 26m/s. Qual o tempo de travessia do túnel?
Capı́tulo 10
Introdução a dinâmica
O estudo das causas do movimento é feito através das Leis de Newton. Tais leis relacionam as
grandezas deslocamento, velocidade e aceleração para a descrição da trajetória de uma partı́cula.
10.1
As leis de Newton
Estabelecida em três leis, com a primeira determinando um referencial em que são aplicáveis as
consequentes.
10.1.1
Primeira Lei de Newton - Lei de Inércia
Uma particula livre da ação de forças se move com velocidade constante
85
86
CAPÍTULO 10.
INTRODUÇÃO A DINÂMICA
Figura 10.1: Galileo e seus alunos, cientista foi um dos precursores da Ciência e discutiu muitas das
idéias aristotélicas
Figura 10.2: Ilustração da Primeira Lei.
10.1.
AS LEIS DE NEWTON
87
Exemplo - Um pêndulo no ônibus
Figura 10.3: Efeitos da inercia.
10.1.2
Segunda Lei de Newton - A resultante das forças
Uma particula sobre a ação de diversas forças se movimenta regida pela expressão
~ =
R
X
F~i = m~a
Relaciona as forças envolvidas e o resultado lı́quido para o movimento da partı́cula.
A resultante das forças sobre uma partı́cula é igual a massa da partı́cula multiplicada pela aceleração proveniente do sistema de forças.
88
CAPÍTULO 10.
INTRODUÇÃO A DINÂMICA
Figura 10.4: Ilustração da Segunda Lei
10.1.3
Terceira Lei de Newton Princı́pio de Ação e Reação
A toda ação corresponde uma reação de mesma intensidade e direção, mas de sentido contrário
Figura 10.5: Ilustração da Terceira Lei
10.1.
AS LEIS DE NEWTON
10.1.4
89
Discussão das três leis
Para aplicar tais leis, cada um dos sistemas deve ser isolado e tratado separadamente.
A força F é aplicada sobre os dois blocos, não há atrito com o plano horizontal. Calcule a
aceleração para o sistema
Figura 10.6: Sistema sob ação de um aforça externa
Isolando o sistema, implementação do diagrama de corpo livre
Devido a força F o corpo 2 deverá se deslocar para a esquerda. Isso só é possı́vel se o corpo 1
também se deslocar, assim o corpo 2 aplica uma ação F21 sobre o bloco 1. Pelo princı́pio de inércia,
o corpo 1 oferece uma reação ao corpo 2, F12 .
Considerando a orientação positiva como no desenho, quando forças que concordam com a
direção indicada tem sinal positiva e forças que discordam tem sinal negativa. Pode se
estabelecer as seguintes equações:
Para o corpo 1 F21 = m1 a
Para o corpo 2 F − F12 = m2 a
O próximo passo é somar as duas igualdades, obtendo:
F21 + F − F12 = m2 a + m1 a
90
CAPÍTULO 10.
INTRODUÇÃO A DINÂMICA
Figura 10.7: Diagrama de corpo livre
F + F21 − F12 = (m1 + m2 ) a
Como F21 e F12 formam um par ação e reação, isso significa que tem intensidades iguais e podem
ser cancelados. Assim:
F = (m1 + m2 ) a
E a aceleração do sistema está estabelecida.
a=
F
(m1 + m2 )
10.2.
10.2
NOÇÕES DE FORÇA, PESO E QUEDA LIVRE. AS LEIS DE NEWTON.
91
Noções de força, peso e queda livre. As Leis de Newton.
Quando levantamos ou movimentamos alguma objeto dizemos que estamos fazendo força sobre uma
objeto. Essa idéia sobre a ação que fazemos ou sofremos sobre os objetos que estão a nossa volta
também está presente no estudo de dinâmica que pretende estabelecer a relação de causa e efeito entre
os objetos de um sistema fı́sico. Adiante os objetivos da cinemática que pretende apenas estabelecer
a trajetória de um objeto em movimento, a dinâmica quer determinar a causa desse movimento para
permitir prever a trajetória em função dessa relação de causa e efeito.
É até parte do folclore a história da maça caindo na cabeça de Isaac Newton. Reza a lenda que
Newton descansava embaixo de um macieira pensando em como determinar as leis que governavam
o movimento no universo, quando uma pequena maça caiu sobre sua cabeça. Acordado dos seus
sonhos Newton percebeu que a maça caia porque a Terra atraia a maçã para o seu centro e mais
ainda a maçã também atraia a Terra na mesma intensidade.
Estava descoberta a força de atração entre os objetos, mais conhecida como força de gravidade.
Deve ficar claro que essa força é em particular a atração da Terra sobre todos os objetos ao seu redor,
e é apenas uma situação bastante familiar pois vivemos aqui. Mas essa força também aparece entre
o Sol e a Terra, com o Sol mantendo o seu domı́nio sobre a órbita da Terra devido ao seu imenso
tamanho. Assim a Terra está para a maçã que cai, assim como o Sol está para a Terra.
Há uma clara distinção entre a massa que o corpo possui, pois está lhe é inerente. E a atração
gravitacional existente entre dois objetos. Essa atração é uma força e no caso da Terra, para todos
os corpos ao seu redor, dizemos que é seu peso que é definido como: P = mg com m a massa do
objeto e g a aceleração da gravidade. O valor de g, para as situações tratadas nos problemas iniciais,
pode ser considerado constante e igual a 10 m/s2.
92
CAPÍTULO 10.
INTRODUÇÃO A DINÂMICA
Assim uma pessoa com 100 kg na Terra terá os mesmo 100 kg. No entanto seu peso será bem
diferente pois na Terra será de 1000N enquanto na Lua será de aproximadamente um sexto deste
valor. Por isso que nas imagens da Lua os astronautas conseguem pular e saltar com tanta facilidade.
A Lua exerce sobre uma atração muito menor.
10.3
Casos especiais
10.3.1
Força Peso
Simplesmente é a atraçao gravitacional que a Terra exerce sobre todos os corpos. Verifica se empiricamente que a aceleração da gravidade é uma constante, para a maioria das aplicações. Assim a
força peso é vertical, no sentido para baixo e com módulo dado por:
P~ = m~g
10.3.2
Força de Atrito
Aparece do contato entre duas superfı́cies quaisquer, microscopicamente é explicada pelas irregularidades na superfı́cie. É definida como uma fração da reação sobre o corpo.
fat ≡ µN
10.3. CASOS ESPECIAIS
93
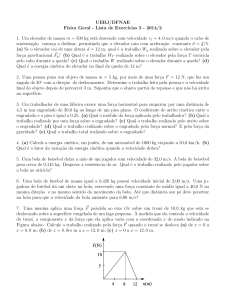
Exemplo
1. O esquema representa um conjunto de dois blocos A e B de massas mA=1 kg, mB =2 kg; no
plano horizontal há atrito com µ = 0, 3. A força F = 15 N,fig 10.3.2. Determine:
(a) A intensidade da força peso de cada bloco
(b) A intensidade da força de atrito
(c) A aceleraçã do sistema
(d) A intensidade da força que A aplica em B
(e) A intensidade da força que B aplica em A
Figura 10.8: Sistema com dois corpos
1. Solução
(a) A intensidade da força peso de cada bloco
Para cada bloco vale P = mg, portanto
PA= mA g =1 10 = 10 N
PB= mB g =2 10 = 20 N
94
CAPÍTULO 10.
INTRODUÇÃO A DINÂMICA
2. A intensidade da força de atrito
FatA= mmA g =0,3 1 10 = 3 N
FatB= mmB g =0,3 2 10 = 6 N
3. A aceleraçã do sistema
Considere o diagrama de corpo livre
Figura 10.9: Diagrama de corpo livre
Aplicando a segunda lei de Newton.
Corpo A
Na vertical PA − NA = 0 1
Na horizontal F − fat − PA − TBA = mA a 2
Corpo B
Na vertical PB − NB = 0 3
10.3. CASOS ESPECIAIS
95
Na horizontal TAB − fatB = mB a 4
Somando as equações 2 e 4 obtém-se:
F − fat PA + (TAB − TBA ) − fatB = mA a + mB a
F − fat PA − fatB = (mA + mB ) a
F − µNA − µNB = (mA + mB ) a
F − µmA g − µmB g = (mA + mB ) aF − µ (mA − mB ) g = (mA + mB ) a
Substituindo os valores
15 − 0, 3 (1 + 2) 10 = (1 + 2) a
6 = 3a
a = 2m/s2
96
CAPÍTULO 10.
INTRODUÇÃO A DINÂMICA
4. A intensidade da força que A aplica em B
Como TAB = TBA, pois este é o par ação e reação e assim podemos fazer TAB = TBA = T
5. A intensidade da força que A aplica em B
Usando a equação 4
TAB = mB a + fatB
TAB = mB a + µNB
TAB = 2 · 2 + 0.3 · 2 · 10
TAB = 10N
6. A intensidade da força que B aplica em A
Como TAB = TBA então TBA = 10 N , mas em sentido contrário
10.4. SISTEMAS DE MÚLTIPLOS CORPOS
10.4
97
Sistemas de Múltiplos Corpos
A vantagem da aplicação da Lei de Newton em sistemas de múltiplos corpos está na construção do
diagrama do corpo livre. Assim mesmo um sistema contendo inúmeros corpos pode ser resolvido, produzindo um número de equações concernentes a cada corpo considerando um sistema de coordenadas
em duas dimensões. Considere a situação dada:
Para os três corpos A, B e C com massas 7 kg e 1 kg e 3 kg respectivamente. Considerando o
fio ideal, adotando g = 10 m/s2 e admitindo um coeficiente de atrito é 0,5 para o corpo C e o plano
horizontal.
Figura 10.10: Sistema Inicial
Determine:
1. (a) A aceleração do sistema
(b) A intensidade das forças de tração nos fios
(c) A intensidade das forças nos blocos
98
CAPÍTULO 10.
INTRODUÇÃO A DINÂMICA
1. Solução
Considere o diagrama de corpo livre
Figura 10.11: diagrama de corpo livre
Aplicando a segunda lei de Newton.
Corpo A
Na vertical PA − T = mA a 1
Corpo B
Na vertical PB − NB = 0 2
Na horizontal T − T 0 = mB a 3
Corpo C
10.4. SISTEMAS DE MÚLTIPLOS CORPOS
99
Na vertical PC − NC = 0 4
Na horizontal T 0 − fat = mC a 5
Somando as equações 1, 3 e 5 obtém-se:
PA − T + T − T 0 + T 0 − fat = mA a + mB a + mC a
Cancelando os pares de ação e reação:
PA − fat = (mA + mB + mC ) a
PA − µNC = (mA + mB + mC ) a
(a) Obtendo finalmente para a aceleração do sistema
a=
mA g − µmC g
(mA + mB + mC )
Substituindo os valores
a=
7 · 10 − 0, 5 · 3 · 10
55
=
= 5m/s2
(7 + 1 + 3)
11
a = 5m/s2
100
CAPÍTULO 10.
INTRODUÇÃO A DINÂMICA
(b) A intensidade da força que A aplica em B
Usando a equação 1
T = mA a + PA
T = 7 · 5 + 7 · 10
T = 105N
(c) A intensidade da força que B aplica em C, usando 3
T 0 = T + mB a
T 0 = 105 + 1 · 5
T 0 = 110N
(d) A intensidade nos blocos, basta usar o lado direito de 1, 3 e 5.
FA = mA a = 7 · 5 = 35N
FB = mB a = 1 · 5 = 5N
FC = mC a = 3 · 5 = 15N
10.5.
PLANO INCLINADO SEM ATRITO
10.5
101
Plano Inclinado sem atrito
Para os corpos A e B com massas mA = 3 kg e mB = 7 kg. Considerando o fio ideal, adotando g =
10 m/s2 e ângulo de inclinação de 30o . Determine:
Figura 10.12: Sistema Inicial
1. (a) A aceleração do sistema
(b) A intensidade das forças de tração nos fios
(c) A intensidade das forças nos blocos
Solução
Considere o diagrama de corpo livre
Aplicando a segunda lei de Newton.
Corpo A
102
CAPÍTULO 10.
INTRODUÇÃO A DINÂMICA
Figura 10.13: diagrama de corpo livre
Na vertical PA − NA = 0 1
Na horizontal T = mA a 2
Corpo B
Perceba que o peso de B foi decomposto em duas componentes:
Paralela ao plano inclinado é Px
Perpendicular ao plano inclinado é Py
De considerações geométricas:
Px = P senα
Py = P cos α
Assim
Em Px Px − T = mB a 3
10.5.
PLANO INCLINADO SEM ATRITO
Em Py Py − NB = 0 4
Somando as equações 2 e 3 obtém-se:
Px − T + T = mA a + mB a
Cancelando os pares de ação e reação:
Psenα = (mA + mB ) a
Obtendo finalmente
a=
Psenα
mb senα
=
g
(mA + mB )
(mA + mB )
Substituindo os valores
a=
7sen30
10 = 3, 5m/s2
(3 + 7)
103
104
10.6
CAPÍTULO 10.
INTRODUÇÃO A DINÂMICA
Plano Inclinado com atrito
Para os corpos A e B e C com massas mA = 3 kg e mB = 7 kg. Considerando o fio ideal, coeficiente
de atrito de m =0,5, g = 10 m/s2 e ângulo de inclinação de 30o . Determine a aceleração do sistema
Figura 10.14: Sistema Inicial
Solução
Considere o diagrama de corpo livre
Aplicando a segunda lei de Newton.
Corpo A
Na vertical PA − NA = 0 1
Na horizontal T = mA a 2
Corpo B
Perceba que o peso de B foi decomposto em duas componentes:
Paralela ao plano inclinado é Px
Perpendicular ao plano inclinado é Py
10.6.
PLANO INCLINADO COM ATRITO
Figura 10.15: diagrama de corpo livre
De considerações geométricas:
Px = P senα
Py = P cos α
Assim
Em Px Px − T − fat = mB a 3
Em Py Py − NB = 0 4
Somando as equações 2 e 3 obtém-se:
Cancelando os pares de ação e reação:
Psenα = (mA + mB ) a
Comofat = µNB = µP cos α, valor obtido pela equação 4, pode se escrever:
105
106
CAPÍTULO 10.
INTRODUÇÃO A DINÂMICA
Psenα − µP cos α = (mA + mB ) a
P (senα − µ cos α) = (mA + mB ) a
a=
P (senα − µ cos α)
(mA + mB )
Obtendo finalmente
a=
mb g (senα − µ cos α)
(mA + mB )
Substituindo os valores
a=
mb g (senα − µ cos α)
7 · 10 (sen30 − 0, 5 · cos 30)
=
= 0, 46m/s2
(mA + mB )
(3 + 7)
10.6.
PLANO INCLINADO COM ATRITO
107
Exercı́cios
1. O esquema representa um conjunto de dois blocos A e B de massas mA=1 kg, mB =2 kg; num
plano horizontal sem atrito. O sistema tem aceleração de 3m/s2, fig. 1. Determine:
Figura 10.16: Problema 1
(a) A intensidade da força F
(b) A intensidade da força que A aplica em B
(c) A intensidade da força que B aplica em A
2. O esquema representa um conjunto de dois blocos A e B de massas mA= 2 kg, mB = 4 kg;
num plano horizontal sem atrito. A força F = 25N, fig. 2. Determine:
Figura 10.17: Problema 2
(a) O valor da aceleração
108
CAPÍTULO 10.
INTRODUÇÃO A DINÂMICA
(b) A intensidade da força que A aplica em B
(c) A intensidade da força que B aplica em A
3. Um bloco de 80 kg repousa num plano horizontal, sobre ele é aplicado sobre ele uma força
F na horizontal e para a esquerda. Considerando que o coeficiente de atrito é 0,25 e o bloco
acelerado com aceleração de 2,5 m/s2. Qual a intensidade de F? Qual a intensidade da força
de atrito.
4. Para os três corpos A, B e C com massas 2 kg , 3 kg e 1 kg respectivamente. Desprezando
todos os atritos, considerando o fio ideal e adotando g = 10 m/s2. Determine:
Figura 10.18: 4
(a) A aceleração do sistema
(b) A intensidade das forças de tração nos fios
10.6.
PLANO INCLINADO COM ATRITO
109
(c) A intesidade das forças nos blocos
5. Para o sistema sem atrito, determine:
Figura 10.19: 5
(a) A aceleração dos corpos
(b) A intensidade das forças de tração nos fios
(c) A inteNsidade das forças nos blocos
Dados: mA=3 kg, mB = 5 kg, mC= 12 kg e F = 150N.
6. Repita o exercı́cio anterior considerando agora uma atrito de 0,5 entre cada bloco e o plano
horizontal
7. Para os corpos A e B e C com massas mA = 5 kg e mB = 7 kg. Considerando o fio ideal,
adotando g = 10 m/s2 e ângulo de inclinação de 45o . Determine:
(a) A aceleração do sistema
(b) A intensidade das forças de tração nos fios
110
CAPÍTULO 10.
INTRODUÇÃO A DINÂMICA
Figura 10.20: 7
8. Para os corpos A e B e C com massas mA = 4 kg e mB = 4 kg. Considerando o fio ideal,
adotando g = 10 m/s2 e ângulo de inclinação de 60o . Determine:
(a) A aceleração do sistema
(b) A intensidade das forças de tração nos fios
10.6.
PLANO INCLINADO COM ATRITO
Figura 10.21: 8
111
112
CAPÍTULO 10.
INTRODUÇÃO A DINÂMICA
Capı́tulo 11
Lista de Dinâmica
11.0.1
Dinâmica
Blocos e Fios em superfı́cie sem atrito
1. O esquema representa um conjunto de dois blocos A e B de massas mA=1 kg, mB =2 kg; num
plano horizontal sem atrito. O sistema tem aceleração de 3m/s2. Determine:
(a) A intensidade da força F
(b) A intensidade da força que A aplica em B
(c) A intensidade da força que B aplica em A
113
114
CAPÍTULO 11.
LISTA DE DINÂMICA
Figura 11.1: Problema 1
2. O esquema representa um conjunto de três blocos A, B e C de massas mA=1 kg, mB =2 kg,
mC=3 kg; num plano horizontal sem atrito. Em A é aplicada uma força de intensidade 12N.
Determine:
Figura 11.2: Problema 2
(a) A aceleração do sistema
(b) A intensidade da força que A aplica em B
(c) A intensidade da força que C aplica em B
3. O conjunto de dois blocos A e B de massas mA=2 kg, mB =4 kg; estão ligados por um fio ideal
e apoiados num plano horizontal sem atrito. O sistema é submetido a uma força de intensidade
de 12N Determine:
(a) A aceleração do sistema
115
Figura 11.3: Problema 3
(b) A intensidade da força nos blocos
(c) A intensidade da força no fio
4. Para o sistema, dados: mA=3 kg, mB = 5 kg, mC= 12 kg e F = 10N, determine:
Figura 11.4: Problema 4
(a) A aceleração dos corpos
(b) A intensidade das forças de tração nos fios
(c) A intesidade das forças nos blocos
5. Para os dois corpos A e B com massas 3 kg e 7 kg respectivamente. Desprezando todos os
atritos, considerando o fio ideal e adotando g = 10 m/s2. Determine:
(a) A aceleração do sistema
116
CAPÍTULO 11.
LISTA DE DINÂMICA
Figura 11.5: Problema 5
(b) A intensidade da força de tração no fio
(c) A intesidade das forças nos blocos
6. No exercı́cio anterior inverta os valores de massa de A e B e recalcule os itens pedidos. Aparecem
diferenças? Justifique.
7. Para o sistema, dados: mA=2 kg, mB = 3 kg, mC= 5 kg e g = 10m/s2., determine:
(a) A aceleração dos corpos
(b) A intensidade das forças de tração nos fios
(c) A intensidade das forças nos blocos
8. Para os três corpos A, B e C com massas 2 kg , 3 kg e 1 kg respectivamente. Desprezando
todos os atritos, considerando o fio ideal e adotando g = 10 m/s2. Determine:
117
Figura 11.6: Problema 7
Figura 11.7: Problema 12.10
118
CAPÍTULO 11.
LISTA DE DINÂMICA
(a) A aceleração do sistema
(b) A intensidade das forças de tração nos fios
(c) A intesidade das forças nos blocos
9. O bloco de 80 kg repousa num plano horizontal, sobre ele é aplicado sobre ele uma força F
como indicado. Considerando que o coeficiente de atrito é 0,25 e o bloco está acelerado com
aceleração de 2,5 m/s2. Qual a intensidade de F?
Figura 11.8: Problema 9
10. O esquema representa um conjunto de dois blocos A e B de massas mA = 5 kg, mB = 5 kg. O
coeficiente de atrito entre os blocos e a superfı́cie é 0,20. É aplicada uma força F de intensidade
40 N. Determine:
Figura 11.9: Problema 10
119
(a) A aceleração do sistema
(b) A intensidade da força que A aplica em B
(c) A intensidade da força que B aplica em A
(d) O valor da força de atrito em cada bloco
Figura 11.10: Problema 10
11. Dois corpos A e B de massas 3,0 kg e 6,0 kg, respectivamente, estão ligados por um fio ideal
que passa por uma polia, sem atrito. Entre o corpo A e o apoio o coeficiente de atrito é de 0,5.
Determine:
(a) A aceleração dos corpos
(b) A intensidade da força de tração no fio
(c) A intensidade da resultante em cada bloco
12. Para os dois corpos A e B com massas 3 kg e 7 kg respectivamente. Considerando o fio ideal,
adotando g = 10 m/s2 e admitindo um coeficiente de atrito é 0,1. Determine:
(a) A aceleração do sistema
120
CAPÍTULO 11.
Figura 11.11: Problema 11
Figura 11.12: Problema 12
LISTA DE DINÂMICA
121
(b) A intensidade das forças de tração nos fios
(c) As intesidades das forças nos blocos
13. Um corpo está na iminência de escorregar sobre um plano inclinado de um ângulo b com a
horizontal. Mostre, que nessas condições tgb = m, onde m é o coeficiente de atrito estático
entre o bloco e o plano inclinado.
14. No sistema os corpos A e B tem massa de 4,0 kg e 8,0 kg respectivamente. Considerando o
atrito entre o corpo A e a superfı́cie igual a 0,15 e a polia e o fio ideias. Calcule:
Figura 11.13: Problema 14
(a) A aceleração do sistema
(b) A intensidade da força sobre o corpo A
(c) A intensidade da força sobre o corpo B
122
CAPÍTULO 11.
LISTA DE DINÂMICA
Figura 11.14: Problema 15
15. No sistema a massa do corpo A é 5kg o coeficiente de atrito entre o corpo A e a superfı́cie é
0,25. Para uma aceleração do sistema igual a 3 m/s2. Determine:
(a) A massa do corpo B
(b) A tração no fio
(c) A reação do plano sobre o corpo A
(d) O valor da força de atrito
16. Dois corpos A e B de massas 5,0 kg e 10,0 kg, respectivamente, estão ligados por um fio ideal
que passa por uma polia, sem atrito. Entre o corpo A e o apoio o coeficiente de atrito é de 0,5.
Determine:
(a) A aceleração dos corpos
(b) A tração no fio
123
Figura 11.15: Problema 16
(c) A reação do plano sobre o corpo A
17. No sistema é aplicada uma força horizontal F, o coeficiente de atrito vale 0,25 e o bloco tem
massa de 2kg. Calcular:
Figura 11.16: Problema 17
(a) O valor de F para o bloco subir com aceleração igual a 1 m/s2.
124
CAPÍTULO 11.
LISTA DE DINÂMICA
(b) A reação do plano sobre o bloco
(c) O valor de F para o bloco descer com aceleração igual a 1 m/s2.
(d) A reação do plano sobre o bloco
18. No sistema o coeficiente de atrito vale 0,2 os fios e a polia são ideais; as massas de A e B são
7kg e 2 kg. Calcular:
Figura 11.17: Problema 18
(a) O valor de F para o bloco subir com aceleração igual a 1 m/s2.
(b) A reação do plano sobre o bloco
(c) O valor da força de atrito
(d) O valor de F para o bloco descer com aceleração igual a 1 m/s2.
19. Para os três corpos A, B e C com massas 5 kg , 4 kg e 1 kg respectivamente. Desprezando
todos os atritos, considerando o fio ideal e adotando g = 10 m/s2. Determine:
125
Figura 11.18: Problema 19
(a) A aceleração do sistema
(b) A intensidade das forças de tração no fio
(c) A intensidade das forças nos blocos
20. No sistema abaixo, calcular :
(a) O valor da força de atrito para manter o bloco 1 preso através do bloco 2
(b) A tração no fio nesta situação o esforço na parede na área de contato
126
CAPÍTULO 11.
Figura 11.19: Problema 20
LISTA DE DINÂMICA
Capı́tulo 12
Energia
12.1
Trabalho de uma força
12.1.1
Definição
O trabalho é definido por:
∆U ≡ Fx · ∆s = F · ∆s · cos θ
com
∆U o trabalho realizado
F a força aplicada
Fx a força aplicada no sentido do movimento
127
128
CAPÍTULO 12.
Figura 12.1: Trabalho
ENERGIA
12.2.
UNIDADE
129
∆s o deslocamento do corpo
q ângulo entre a força aplicada e o deslocamento do móvel.
A figura expõe a situação mais geral, quando uma força aplicada faz o objeto se movimentar
numa determinada direção.
A situação mais simples ocorre quando a força aplicada é paralela ao deslocamento do corpo.
Assim q = 0 e tem se:
∆U ≡ F · ∆s · cos (0)
∆U = F · ∆s
É muito importante estabelecer corretamente o sentido dessas três grandezas: o sentido do deslocamento, o sentido da força, e o ângulo entre a força aplicada e o deslocamento ocorrido.
Uma situação interessante é quando a força é aplicada perpendicularmente ao deslocamento, neste
caso q = 90o . Usando a definição:
∆U ≡ F · ∆s · cos (90)
∆U = F · ∆s · 0
∆U = 0J
Assim quando uma força é aplicada perpendicularmente ao deslocamento ela não realiza trabalho,
independente do deslocamento ou do valor da intensidade da força aplicada.
12.2
Unidade
Como qualquer grandeza fı́sica, o trabalho também possui unidade. Ela é derivada das grandezas
que estão envolvidas na sua definição. Ou seja a unidade de trabalho é o produto das unidades de
130
CAPÍTULO 12.
ENERGIA
força e distância. Lembrar que o ângulo tem unidade, mas o cosseno é um número adimensional.
Normalmente escreve se no sistema internacional:
[∆[U ] = [F ].[∆s]
[∆[U ] = N.m
Essa nova unidade Nm foi batizada de Joule, em homenagem a James Prescout Joule.
Trocando em miúdos, quando alguém aplica uma força de 1 Newton, paralalelamente, ao movimento de um corpo que por isso se desloca 1m, essa pessoa realizou um trabalho de 1 Joule.
12.3
Gráfico
É comum o levantamento de um gráfico de força por deslocamento, como o indicado:
Neste gráfico está indicado o que ocorre com a força aplicada durante o deslocamento de um bloco
que sai da posição original e se desloca por 3 m.
O trabalho aplicado pode ser calculado simplesmente calculando a área abaixo da curva.
12.4
Método de Análise
Etapa 1 Leia o enunciado com atenção
Etapa 2 Entenda a situação exposta
Etapa 3 Identifique:
A força presente
O deslocamento ocorrido
Etapa 4 Determine o ângulo entre a força presente e o deslocamento ocorrido
12.5.
APLICAÇÃO 1
131
Etapa 5 Aplique a definição do trabalho
12.5
Aplicação 1
Uma força F aplicada a uma caixa, com q sendo 60o e intensidade de 100N, desloca a por uma
distância de 5m. Qual o trabalho realizado?
Figura 12.2: Trabalho
Esse exemplo é uma aplicação direta da definição de trabalho. Antes de qualquer coisa é necessário
estabelecer as três grandezas envolvidas: as forças aplicadas na caixa, o ângulo em relação ao deslocamento de cada uma das forças, e a distância percorrida.
Estabelecendo o diagrama de corpo livre para a situação:
Primeiro a força aplicada F foi substituı́da pelas suas componentes horizontais e verticais, pela
trigonometria temos que:
132
CAPÍTULO 12.
Figura 12.3: Trabalho
Fx = Fcos(60o ) = 100 *.5 = 50 N
Fy= Fsin(60o) = 100 *.86 = 86 N
Só com ilustração vamos calcular o trabalho de cada uma dessas componentes :
Trabalho de Fx
A intensidade é igual a 50 N, Fx = 50 N
O ângulo entre Fx e o deslocamento é igual a 0o , pois são paralelos. q = 0o
O deslocamento é igual a 5m. Ds=5m
Aplicando a definição de trabalho:
∆U ≡ Fx · ∆s · cos (0)
∆U = 50 · 5 · 1 = 250J
Ou seja o trabalho realizado na horizontal é de 250J.
ENERGIA
12.5.
APLICAÇÃO 1
133
Trabalho de Fy
A intensidade é igual a 86 N, Fx = 86N
O ângulo entre Fy e o deslocamento é igual a 90o , pois são perpendiculares. q = 90o
O deslocamento é igual a 0m, pois a caixa permanece em contato com a base. Ds=0m
Aplicando a definição de trabalho:
∆U ≡ Fy · ∆s · cos (90)
∆U = 86 · 0 · 0 = 0J
Ou seja o trabalho realizado na horizontal é de 250J.
Assim o resultado é que na situação dada o trabalho realizado é de 250J.
Esse resultado poderia ser obtido diretamente, sem a decomposição da força aplicada, neste caso,
terı́amos:
Trabalho de F
A intensidade é igual a 100 N, Fx = 100N
O ângulo entre Fy e o deslocamento é igual a 60o,conforme o esquema. q = 60o
O deslocamento é igual a 5m, pois a caixa permanece em contato com a base. Ds=5m
Aplicando a definição de trabalho:
∆U ≡ F · ∆s · cos (60)
∆U = 100 · 5 · 0.5 = 250J
Que, obviamente, é o valor obtido anteriormente. Qualquer das duas formas de solução é possı́vel.
134
12.6
CAPÍTULO 12.
ENERGIA
Aplicação 2
Considere uma caixa de 10 kg e deslocando se sobre a mesa na horizontal, o coeficiente de atrito
entre a mesa e o bloco vale 0,4. Devido a força F aplicada, a caixa tem uma aceleração de 1m/s2.
Calcule :
Figura 12.4: Trabalho Aplicação 2
1. A intensidade da força de atrito
2. A intensidade da força F
3. O trabalho da força de atrito
4. O trabalho realizado pela força F
5. O trabalho total
12.6.
APLICAÇÃO 2
135
Figura 12.5: Trabalho
Da mesma forma que na situação anterior devemos determinar primeiro as três grandezas envolvidas:
as forças aplicadas na caixa, o ângulo em relação ao deslocamento de cada uma das forças, e a
distância
percorrida. Mas para fazer isso primeiro devemos estabelecer escrever as leis de Newton para o
sistema, determinando assim as forças aplicadas.
Estabelecendo o diagrama de corpo livre para a situação:
Aplicando a 2a lei de Newton para as direções vertical e horizontal, obtemos:
Na horizontal Fx − fat = ma
Na vertical Fy + N − P = 0
Cada um dos termos pode ser substituı́do por:
136
CAPÍTULO 12.
Figura 12.6: Trabalho
Fx = F cos (θ)
Fy = F sen (θ)
fat = µN
P = mg
Assim as equações são escritas como:
F cos (θ) − µN = ma
F sen (θ) + N = mg
Determinação da força de atrito
ENERGIA
12.6.
APLICAÇÃO 2
137
Para determinar a força de atrito é necessário calcular a reação N. As duas equações acima ficam:
F cos (θ) sin (θ) − µN sin (θ) = masin (θ)
F sen (θ) cos (θ) + N cos (θ) = mg cos (θ)
Subtraindo a primeira equação da segunda, teremos:
F cos (θ) sin (θ) − µN sin (θ) = masin (θ)
N (cos (θ) + µsin (θ)) = m (g cos (θ) + asin (θ))
N=
m (g cos (θ) + asin (θ))
cos (θ) + µsin (θ)
E então a força de atrito será dada por:
fat = µN = µ
fat = µ
m (g cos (θ) + asin (θ))
cos (θ) + µsin (θ)
m (g cos (θ) + asin (θ))
cos (θ) + µsin (θ)
e está determinado o valor da força de atrito.
Determinação da força F
138
CAPÍTULO 12.
Voltando ao sistema
F cos (θ) − µN = ma
F sen (θ) + N = mg
Multiplicando a segunda equação por m e reescrevendo:
F cos (θ) − µN = ma
µF sen (θ) + µN = µmg
Somando as duas equações:
F (cos (θ) + µsen (θ)) = m (a + µg)
m(a+µg)
e o valor da força aplicada está determinado
F = cos(θ)+µsen(θ)
Numericamente obtemos:
A força de atrito vale:
fat = µ
m (g cos (θ) + asin (θ))
10 (10 cos (60) + 1sin (60))
= 0.4
= 27.72N
cos (θ) + µsin (θ)
cos (60) + 0.4sin (60)
A força aplicada é:
ENERGIA
12.6.
APLICAÇÃO 2
F =
139
m (a + µg)
10 (1 + 0.4 · 10)
=
= 59.07N
cos (θ) + µsen (θ)
cos (60) + 0.4sen (60)
Agora para calcular o trabalho é só aplicar a definição
Trabalho da força de atrito
A intensidade da força é f at = 27.72N
O ângulo é α = 180o , pois o deslocamento e a força são paralelas mas tem sentido contrário.
A distância é Deltas = 5m
Assim
∆U ≡ fat · ∆s · cos θ = 27, 72 · 5 · cos (180)
∆U = −138.6J
Trabalho da força aplicada
A intensidade da força é F= 59.07N
O ângulo é q = 60o , conforme a figura
A distância é Ds = 5 m
Assim
∆U ≡ F · ∆s · cos θ = 59.07 · 5 · cos (60)
∆U = 147.67J
Trabalho total
DUT = DUF + DUFat =147.67+(-138.6) =9.07 J
140
CAPÍTULO 12.
12.7
Casos tı́picos
12.7.1
Força Peso
O trabalho associado é dado por:
∆U = mgh
com h sendo a altura do deslocamento vertical.
Perceba que o trabalho é independente da trajetória
Figura 12.7: Trabalho
12.7.2
Força da mola
O trabalho associado é dado por:
1
∆U = kx2
2
ENERGIA
12.7.
CASOS TÍPICOS
141
com k sendo a constante de elasticidade da mola
x a deformação da mola.
Figura 12.8: Trabalho
12.7.3
Força de atrito
O trabalho associado é dado por:
∆U = −µmgd
com d o deslocamento ocorrido
m o coeficiente de atrito
142
CAPÍTULO 12.
ENERGIA
Figura 12.9: Trabalho
12.8
Exercı́cios
1. Um corpo de massa 5 kg é erguido, com velocidade escalar constante, até uma altura de 10 m,
pela ação de uma força Fo. Qual o trabalho realizado sobre o corpo :
(a) Pela força Fo
(b) Pela gravidade da Terra.
2. Calcular o trabalho realizado pela força Fx, dada pelo gráfico, que aplicada a uma partı́cula a
desloca de x = 1m até x = 4m. Figura 12.10
3. Para a força Fx, dada pelo gráfico, calcular o trabalho para a partı́cula
(a) Quando se move de x = 0m até x = 3m.
12.8. EXERCÍCIOS
143
Figura 12.10: Trabalho
(b) Quando se move de x = 3m até x = 6m.
(c) Quando se move de x = 0m até x = 6m.
4. Uma caixa de 10 kg está sobre uma mesa horizontal. O coeficiente de atrito vale 0,4. Uma força
Fx empurra a caixa por uma distância de 5m. Se a velocidade da caixa é constante, calcule:
(a) O trabalho de Fx
(b) O trabalho da força de atrito.
5. Se a caixa é impressa uma aceleração de 2 m/s2, calcule:
(a) O trabalho de Fx
144
CAPÍTULO 12.
ENERGIA
Figura 12.11: Trabalho
(b) O trabalho da força de atrito.
12.9
Energia Cinética de um ponto material
A energia cinética está relacionada a velocidade do ponto material
12.9.1
Definição
Voltando à situação inicial, quando foi definido o trabalho realizado pela força, percebe-se que enquanto a força estiver sendo aplicada haverá sempre uma aceleração não nula e por conseguinte a
12.9. ENERGIA CINÉTICA DE UM PONTO MATERIAL
145
velocidade do corpo irá alterar-se continuamente.
Figura 12.12: Trabalho
Há uma correspondência entre o trabalho realizado e a variação da velocidade. Para perceber
isso é necessário definir a energia cinética:
1
T = mv 2
2
12.9.2
Unidade
Para a energia cinética a unidade será
m 2
m
T = kg
= kg 2 · m = F · m = J
s
s
com a mesma unidade do trabalho realizado.
146
CAPÍTULO 12.
12.9.3
ENERGIA
Princı́pio do trabalho e energia
Vamos estabelecer um princı́pio associando a energia cinética com o trabalho realizado. A argumentação envolve alguma matemática, finalmente a expressão obtida é:
∆U1→2 = T2 − T1 ou numa forma mais direta
T1 + ∆U1→2 = T2 Princı́pio do trabalho e energia
Traduzindo, o corpo na situação inicial tem certa velocidade e uma energia cinética associada, adicionando o trabalho desenvolvido para se chegar a situação final obteremos a energia cinética final,
e por conseguinte a velocidade final.
12.10
Exercı́cios
1. Comparada com a energia necessária para acelerar um automóvel de 0 a 60 km/h, quanta
energia é necessária para acelerá-lo de 60 km/h a 120 km/h, desprezando a ação do atrito?
(a) A mesma
(b) O dobro
(c) O triplo
(d) Quatro vezes mais
(e) Oito vezes mais
O enunciado a seguir refere-se as próximas três questões:
”Um bloco de madeira cuja massa é 120 g é puxado por um dinamômetro sobre uma superfı́cie
horizontal. O bloco se desloca com velocidade constante quando o dinamômetro marca 0,3 N.”
12.10. EXERCÍCIOS
147
(a) Qual é o trabalho realizado pela força exercida pelo dinamômetro sobre o bloco se este é
arrastado com velocidade constante, ao longo de 0,5 m?
(b) Qual seria a aceleração do bloco, em m/s2 , se a força exercida pelo dinamômetro fosse
aumentada para 0,42 N ?
(c) Qual seria, em J, a variação de energia cinética do bloco, se, na situação em que a força
exercida pelo dinamômetro foi aumentada para 0,42 N, ela atuasse ao longo de 0,5 m?
(d) (UFRGS/1989-2a Etapa) Uma força resultante constante de módulo igual a 40 N atua
sobre um corpo que se movimenta em linha reta. Qual a distância percorrida por esse
corpo durante o tempo em que sua energia cinética variou de 80 J?
2. Analise as afirmações sobre trabalho mecânico apresentadas nas alternativas e indique a correta.
(a) Sempre que uma força não nula atua em uma partı́cula, essa força realiza trabalho.
(b) O trabalho realizado pela força resultante que atua sobre um corpo, na direção do movimento, é nulo.
(c) O trabalho realizado pela força de atrito que atua sobre um corpo em movimento é nulo.
(d) Sobre uma partı́cula que permanece em repouso pode estar sendo realizado trabalho.
(e) O trabalho realizado pela força que atua sobre um corpo pode ser igual à variação da
energia cinética desse corpo.
3. Uma pedra de 17,8 N , abandonada de uma altura h, atinge o solo, com velocidade de 18,3
m/s.
148
CAPÍTULO 12.
ENERGIA
(a) Obtenha a energia cinética da pedra ao atingir o solo
(b) Calcule a altura que ela foi abandonada
4. Uma caçamba se movimenta ao longo de uma ponte fixa com velocidade de 3,75 m/s. Se o
suporte móvel para repentina qual o deslocamento horizontal da caçamba? Figura 12.13
Figura 12.13: Trabalho
5. Qual a velocidade do suporte móvel admitindo um desvio angular de 18o para os cabos de
sustentação da caçamba após a parada abrupta desta?
6. Dois blocos A e B de massas iguais a 8kg e 12 kg estão suspensos por um fio que passa por
uma polia de massa desprezı́vel. O sistema inicialmente está em repouso.Figura 12.14
12.11. POTÊNCIA
149
Figura 12.14: Trabalho
Admitindo que a energia dissipada pelo atrito no eixo da polia seja igual a 10 J, calcule:
(a) A velocidade do bloco B, quando este atinge o solo
(b) A força do cabo sobre cada bloco.
12.11
Potência
Precisamos estabelecer uma distinção, considere que um motor e uma pessoa empurrando um bloco,
ambos devem fornecer o mesmo trabalho ao final. Naturalmente um motor pode fornecer esse trabalho muito mais rapidamente que um pessoa. Assim é necessário distinguir em quanto tempo esse
trabalho será fornecido, ou de outra forma qual a potência desenvolvida em cada caso.
150
CAPÍTULO 12.
12.11.1
ENERGIA
Definição
A potência é definida como a quantidade de trabalho realizado durante um intervalo de tempo, ou
P =
∆U
∆t
Que também pode ser escrito:
P =
12.11.2
F · .∆s
.∆s
=F
=F ·v
∆t
∆t
Unidade
A unidade de potência denominada Watt é dada por:
[P ] =
12.12
[∆U ]
J
m
= =N·
=W
[∆t]
s
s
Exercı́cios
1. Uma força de intensidade 10N é aplicada a um corpo, deslocando-o de 2,0m na direção e
sentido da força durante 5s. Determine:
(a) O trabalho realizado pela força
(b) A potência média dessa força
12.12. EXERCÍCIOS
151
2. Um automóvel num trecho horizontal tem velocidade constante de 20m/s, apesar de atuar
sobre ele uma força resistente total de 800N que se opõe ao movimento. Qual a potência
motora necessária para mantê-lo em movimento?
3. Determine a potência para um motor içar um caixote de 50kg se o cabo está sendo recolhido
com uma aceleração de 2m/s2 no instante em que o bloco tem velocidade de 5m/s.
4. Um vagão de trem consome 300kW de potência. Se o vagão tem massa de 18 toneladas e está
se deslocando ao longo de uma via férrea horizontal, determine a velocidade que ele atinge em
20s partindo do repouso.