Cálculo II
Bioengenharia
César Silva
Departamento de Matemática
Universidade da Beira Interior
2009/2010
César Silva (UBI)
Cálculo II
2009/2010
1 / 460
Bibliografia
– Apostol, T.M., Cálculo, Vol. 1 e 2, Reverté, 1993
– Azenha, A., Jerónimo, M. A., Elementos de Cálculo Diferencial e Integral em R e
Rn , McGraw-Hill, 1995
– Dias Agudo, F.R., Análise Real, Vol. I, Escolar Editora, 1989
– Demidovitch, B., Problemas e exercícios de Análise Matemática, McGrawHill,
1977
– Lima, E. L., Curso de Análise, Vol. 1 e 2, Projecto Euclides, IMPA, 1989
– Lima, E. L., Análise Real, Vol. 1 e 2, Colecção Matemática Universitária, IMPA,
2004
– Mann, W. R., Taylor, A. E., Advanced Calculus, John Wiley and Sons, 1983
– Sarrico, C., Análise Matemática – Leituras e exercícios, Gradiva, 3a Ed., 1999
– Stewart, J., Calculus (International Metric Edition), Vol. 1 e 2, Brooks/Cole
Publishing Company, 2008
– Swokowski, E. W., Cálculo com Geometria Analítica, Vol. 1 e 2, McGrawHill,
1983
César Silva (UBI)
Cálculo II
2009/2010
2 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
3 / 460
Índice
1
Sucessões e séries de números reais
Sucessões de números reais
Séries de números reais
Série de potências e série de Taylor
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
4 / 460
Índice
1
Sucessões e séries de números reais
Sucessões de números reais
Definição e exemplos
Sucessões limitadas e sucessões monótonas
Sucessões convergentes
Subsucessões
Infinitamente grandes
Séries de números reais
Série de potências e série de Taylor
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
5 / 460
Índice
1
Sucessões e séries de números reais
Sucessões de números reais
Definição e exemplos
Sucessões limitadas e sucessões monótonas
Sucessões convergentes
Subsucessões
Infinitamente grandes
Séries de números reais
Série de potências e série de Taylor
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
6 / 460
§1.1.1
Definição e exemplos
Uma sucessão é uma correspondência que a cada número natural n
faz corresponder um e um só número real.
Assim, uma sucessão é uma função real de variável natural, ou seja,
uma sucessão é uma função
u : N → R.
Para designarmos o valor da função em n costuma usar-se a notação
un em vez de u(n).
César Silva (UBI)
Cálculo II
2009/2010
7 / 460
§1.1.1
Definição e exemplos
Aos valores
u1 , u2 , . . . , un , . . .
chamamos termos da sucessão e
ao valor u1 chamamos termo de ordem 1 ou primeiro termo
da sucessão;
ao valor u2 chamamos termo de ordem 2 ou segundo termo
da sucessão;
ao valor u3 chamamos termo de ordem 3 ou terceiro termo da
sucessão;
etc
À expressão un chamamos termo geral da sucessão.
César Silva (UBI)
Cálculo II
2009/2010
8 / 460
§1.1.1
Definição e exemplos
Escreveremos
(u1 , u2 , . . . , un , . . .),
ou
(un )n∈N ,
ou simplesmente
(un )
para indicar a sucessão u.
O conjunto
u(N) = {un : n ∈ N}
designa-se por conjunto dos termos da sucessão (un )n∈N .
César Silva (UBI)
Cálculo II
2009/2010
9 / 460
§1.1.1
Definição e exemplos
Exemplos de sucessões
a) Façamos
isto é,
un = 1 para todo o n ∈ N,
(1, 1, . . . , 1, . . .)
é a sucessão constante e igual a 1. Mais geralmente, dado c ∈ R e
fazendo
vn = c para qualquer n ∈ N,
temos a sucessão constante e igual a c. Neste caso
v(N) = {c} .
César Silva (UBI)
Cálculo II
2009/2010
10 / 460
§1.1.1
Definição e exemplos
Exemplos de sucessões (continuação)
b) Consideremos a sucessão de termo geral un = (−1)n .
O primeiro termo desta sucessão é u1 = (−1)1 = −1.
O segundo termo desta sucessão é u2 = (−1)2 = 1.
O terceiro termo desta sucessão é u3 = (−1)3 = −1.
O quarto termo desta sucessão é u4 = (−1)4 = 1.
E assim sucessivamente.
Podemos concluir que os termos de ordem par são todos iguais a 1 e
que os termos de ordem ímpar são todos iguais a −1. Assim, a lista
que se segue dá-nos todos os termos da sucessão
−1, 1, −1, 1, −1, 1, −1, 1, −1, 1, . . .
e o conjunto dos termos desta sucessão é
u(N) = {−1, 1} .
César Silva (UBI)
Cálculo II
2009/2010
11 / 460
§1.1.1
Definição e exemplos
Exemplos de sucessões (continuação)
c) Seja u a sucessão definida por
un = n.
Então
u(N) = N.
César Silva (UBI)
Cálculo II
2009/2010
12 / 460
§1.1.1
Definição e exemplos
Exemplos de sucessões (continuação)
d) Seja
1
para todo o n ∈ N.
n
Podemos escrever esta sucessão das seguintes formas:
un =
ou
ou
1
1 1 1
1, , , , . . . , , . . . ,
2 3 4
n
1
n
1
.
n
Neste exemplo temos u(N) =
César Silva (UBI)
,
n∈N
1
:n∈N .
n
Cálculo II
2009/2010
13 / 460
§1.1.1
Definição e exemplos
Observação
O exemplo a) mostra que
(un )n∈N
e
u(N)
são coisas diferentes e que, por conseguinte, não devem ser
confundidas. Neste exemplo tem-se
(un ) = (1, 1, 1, . . . , 1, . . .),
enquanto que
u(N) = {1} .
Algo de semelhante acontece no exemplo b).
César Silva (UBI)
Cálculo II
2009/2010
14 / 460
Índice
1
Sucessões e séries de números reais
Sucessões de números reais
Definição e exemplos
Sucessões limitadas e sucessões monótonas
Sucessões convergentes
Subsucessões
Infinitamente grandes
Séries de números reais
Série de potências e série de Taylor
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
15 / 460
§1.1.2
Sucessões limitadas e sucessões monótonas
Uma sucessão (un )n∈N diz-se limitada se existirem números reais a e b
tais que
a ≤ un ≤ b para todo o n ∈ N;
ou ainda, se existirem números reais a e b tais que
un ∈ [a, b] para todo o n ∈ N.
Como todo o intervalo [a, b] está contido num intervalo da forma
[−c, c], para algum c ∈ R, uma sucessão (un ) é limitada se existir um
número real c > 0 tal que
un ∈ [−c, c] para todo o n ∈ N,
o que é equivalente a existe c > 0 tal que
|un | ≤ c para todo o n ∈ N.
As sucessões que não são limitadas dizem-se ilimitadas.
César Silva (UBI)
Cálculo II
2009/2010
16 / 460
§1.1.2
Sucessões limitadas e sucessões monótonas
Exemplos
a) A sucessão de termo geral
un = 4 + (−1)2 =
(
3
5
se n é ímpar;
se n é par;
é limitada pois
3 ≤ un ≤ 5 para qualquer número natural n.
César Silva (UBI)
Cálculo II
2009/2010
17 / 460
§1.1.2
Sucessões limitadas e sucessões monótonas
Exemplos (continuação)
b) Consideremos a sucessão de termo geral
un =
Como
n+2
.
n
n 2
2
n+2
= + =1+
n
n n
n
podemos concluir que
1 ≤ un ≤ 3 para cada número natural n.
Assim, esta sucessão é limitada.
César Silva (UBI)
Cálculo II
2009/2010
18 / 460
§1.1.2
Sucessões limitadas e sucessões monótonas
Exemplos (continuação)
c) A sucessão un = n2 não é limitada. De facto,
u1 = 1; u2 = 4; u3 = 9; u4 = 16; . . .
pelo que a sucessão não é limitada superiormente.
d) A sucessão de termo geral vn = −n também não é limitada pois
v1 = −1; v2 = −2; v3 = −3; . . .
ou seja, esta sucessão não é limitada inferiormente.
César Silva (UBI)
Cálculo II
2009/2010
19 / 460
§1.1.2
Sucessões limitadas e sucessões monótonas
Uma sucessão (un )n∈N diz-se crescente se
un+1 ≥ un para todo o n ∈ N
e diz-se decrescente se
un+1 ≤ un para todo o n ∈ N.
Equivalentemente, (un )n∈N é crescente se
un+1 − un ≥ 0 para todo o n ∈ N
e é decrescente se
un+1 − un ≤ 0 para todo o n ∈ N.
Uma sucessão diz-se monótona se for crescente ou se for decrescente.
César Silva (UBI)
Cálculo II
2009/2010
20 / 460
§1.1.2
Sucessões limitadas e sucessões monótonas
Exemplos de sucessões monótonas
a) Consideremos a sucessão de termo geral un =
un+1 − un =
2n − 1
. Como
n+1
2(n + 1) − 1
2n − 1
−
(n + 1) + 1
n+1
=
2n − 1
2n + 1
−
n+2
n+1
=
(2n + 1)(n + 1) − (2n − 1)(n + 2)
(n + 1)(n + 2)
=
2n2 + 2n + n + 1 − (2n2 + 4n − n − 2)
(n + 1)(n + 2)
=
2n2 + 3n + 1 − 2n2 − 3n + 2
(n + 1)(n + 2)
=
3
≥0
(n + 1)(n + 2)
para qualquer número natural n, a sucessão é crescente.
César Silva (UBI)
Cálculo II
2009/2010
21 / 460
§1.1.2
Sucessões limitadas e sucessões monótonas
Exemplos de sucessões monótonas (continuação)
b) Para a sucessão de termo geral un =
2n + 1
, temos
n
2(n + 1) + 1
2n + 1
−
n+1
n
2n + 1
2n + 3
−
=
n+1
n
un+1 − un =
=
(2n + 3)n − (2n + 1)(n + 1)
n(n + 1)
=
2n2 + 3n − (2n2 + 2n + n + 1)
n(n + 1)
=
2n2 + 3n − 2n2 − 3n − 1
n(n + 1)
=
−1
≤0
n(n + 1)
para qualquer número natural n. Logo a sucessão é decrescente.
César Silva (UBI)
Cálculo II
2009/2010
22 / 460
Índice
1
Sucessões e séries de números reais
Sucessões de números reais
Definição e exemplos
Sucessões limitadas e sucessões monótonas
Sucessões convergentes
Subsucessões
Infinitamente grandes
Séries de números reais
Série de potências e série de Taylor
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
23 / 460
§1.1.3
Sucessões convergentes
Dados uma sucessão (un )n∈N e um número real a, dizemos que (un )
converge ou tende para a se para qualquer ε > 0, existe N ∈ N tal
que
|un − a| < ε para todo o número natural n > N .
A condição
é equivalente às condições
|un − a| < ε
−ε < un − a < ε, a − ε < un < a + ε
e un ∈ ]a − ε, a + ε[.
Assim, uma sucessão (un ) converge ou tende para um número real a
se para qualquer ε > 0, existe N ∈ N tal que
a − ε < un < a + ε para cada número natural n > N ;
ou se para qualquer ε > 0, existe N ∈ N tal que
un ∈ ]a − ε, a + ε[ para cada número natural n > N .
César Silva (UBI)
Cálculo II
2009/2010
24 / 460
§1.1.3
Sucessões convergentes
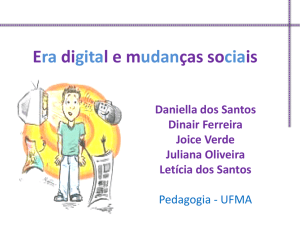
Geometricamente, uma sucessão un tende para a se dado ε > 0 todos
os termos da sucessão estão na “faixa” limitada pela rectas y = a − ε e
y = a + ε a partir de determinada ordem. A figura seguinte ilustra esse
facto.
b
a+ε
b
b
a
b
b
a−ε
b
b
b
1
2
3
4
N
N +1 N +2 N +3 N +4
b
Interpretação geométrica do limite de uma sucessão
César Silva (UBI)
Cálculo II
2009/2010
25 / 460
§1.1.3
Sucessões convergentes
Qualquer uma das notações
lim un = a,
n→∞
limn→∞ un = a,
lim un = a,
n
lim un = a,
un → a
é usada para exprimir o facto de que a sucessão (un ) converge para a.
Uma sucessão (un )n∈N diz-se convergente se existe um número real a
tal que un → a.
As sucessões que não são convergentes dizem-se divergentes.
César Silva (UBI)
Cálculo II
2009/2010
26 / 460
§1.1.3
Sucessões convergentes
As sucessões constantes são convergentes. Se un = c para qualquer
número natural n, temos |un − c|=0 para cada n ∈ N, pelo que, dado
ε > 0, tomando N = 1 vem
|un − c| < ε para qualquer n > N .
Logo (un ) converge para c.
1
A sucessão de termo geral un = converge para zero. De facto, dado
n
ε > 0, basta escolher um número natural N tal que N ε > 1 e, por
conseguinte, 1/N < ε. Assim, para n > N , temos
|un − 0| = 1/n < 1/N < ε,
o que prova que un → 0.
César Silva (UBI)
Cálculo II
2009/2010
27 / 460
§1.1.3
Sucessões convergentes
Unicidade do limite
Sejam (un ) uma sucessão e a e b dois números reais. Se
un → a e un → b,
então
a = b.
César Silva (UBI)
Cálculo II
2009/2010
28 / 460
§1.1.3
Sucessões convergentes
Dadas duas sucessões u = (un )n∈N e v = (vn )n∈N de números reais,
define-se a soma de u e v, e designa-se por u + v, a sucessão cujo
termo de ordem n é un + vn , isto é,
(u + v)n = un + vn .
De modo análogo se define a diferença, o produto e o quociente de
u e v (este último apenas na hipótese de se ter vn 6= 0 para todo o
n ∈ N):
(u − v)n = un − vn ,
(uv)n = un vn
e, na hipótese de vn 6= 0 para todo o n ∈ N,
u
v
César Silva (UBI)
n
=
un
.
vn
Cálculo II
2009/2010
29 / 460
§1.1.3
Sucessões convergentes
Assim, se u e v são as sucessões dadas por
2
1, 4, 9, . . . , n , . . .
e
1
1 1
1, , , . . . , , . . . ,
2 3
n
respectivamente, então u + v é a sucessão dada por
1
1
1
1 + 1, 4 + , 9 + , . . . , n2 + , . . .
2
3
n
=
9 28
n3 + 1
2, , , . . . ,
,...
2 3
n
!
e a diferença de u e v, u − v, é a sucessão
1
1
1
1 − 1, 4 − , 9 − , . . . , n2 − , . . .
2
3
n
César Silva (UBI)
Cálculo II
=
!
7 26
n3 − 1
0, , , . . . ,
,... .
2 3
n
2009/2010
30 / 460
§1.1.3
Sucessões convergentes
Continuando a usar as sucessões u e v dadas por
1, 4, 9, . . . , n2 , . . .
e
1 1
1
1, , , . . . , , . . . ,
2 3
n
= (1, 2, 3, . . . , n, . . .)
o produto uv é a sucessão
1
1 1
1.1, 4. , 9. , . . . , n2 . , . . .
2 3
n
e o quociente
u
é a sucessão
v
9
n2
1 4
,
,
,...,
,...
1 1/2 1/3
1/n
César Silva (UBI)
!
= 1, 8, 27, . . . , n3 , . . . .
Cálculo II
2009/2010
31 / 460
§1.1.3
Sucessões convergentes
As sucessões que convergem para zero designam-se por infinitésimos.
O produto de um infinitésimo por uma sucessão limitada é um
infinitésimo.
Exemplo
Para todo o x ∈ R, temos lim
n→∞
sen(nx)
= 0. De facto,
n
1
sen(nx)
= sen(nx)
n
n
é o produto de um infinitésimo por uma sucessão limitada e, portanto,
converge para zero.
César Silva (UBI)
Cálculo II
2009/2010
32 / 460
§1.1.3
Sucessões convergentes
Álgebra dos limites
Sejam (un ) e (vn ) sucessões tais que lim un = a e lim vn = b. Então
a) (un + vn )n∈N é convergente e
lim(un + vn ) = lim un + lim vn = a + b;
b) (un − vn )n∈N é convergente e
lim(un − vn ) = lim un − lim vn = a − b;
c) (un . vn )n∈N é convergente e
lim(un . vn ) = lim un . lim vn = a . b;
un
d) se b 6= 0 e vn =
6 0 para todo o n ∈ N,
é convergente e
vn n∈N
lim
César Silva (UBI)
un
vn
=
lim un
a
= .
lim vn
b
Cálculo II
2009/2010
33 / 460
§1.1.3
Sucessões convergentes
Suponhamos que
un → a
e que todos os termos un pertencem ao domínio de uma função f . Se f
é contínua em a, então
f (un ) → f (a).
Como consequência imediata temos a seguinte propriedade.
Seja (un ) uma sucessão convergente para a ∈ R e p > 0. Então
a) se un → a, então (un )p → ap ;
b) se un ≥ 0 para todo o n ∈ N, então
César Silva (UBI)
Cálculo II
√
√
p u → p a.
n
2009/2010
34 / 460
§1.1.3
Sucessões convergentes
Seja f é um função com domínio contendo o conjunto dos números
naturais. Se
lim f (x) = a,
x→+∞
então
lim f (n) = a.
n→+∞
Exemplo
Como
lim
1+
1
x
x
= e,
lim
1+
1
n
n
= e.
x→+∞
temos
n→+∞
César Silva (UBI)
Cálculo II
2009/2010
35 / 460
§1.1.3
Sucessões convergentes
Teorema da sucessão enquadrada
Sejam (un ), (vn ) e (wn ) sucessões e suponha-se que existe uma ordem
p ∈ N tal que
un ≤ vn ≤ wn para todo o número natural n > p.
Se un → a e wn → a, então
César Silva (UBI)
vn → a.
Cálculo II
2009/2010
36 / 460
§1.1.3
Sucessões convergentes
Exemplo de aplicação do teorema da sucessão enquadrada
Vejamos que
r
4+
Como
2≤
r
1
4+ 2 ≤
n
s
1
4+4 +
n
1
→ 2.
n2
2
1
n
=
s
2+
1
n
2
=2+
1
n
e
1
→ 2,
n
pelo teorema da sucessão enquadrada temos de ter
2+
r
4+
César Silva (UBI)
1
→ 2.
n2
Cálculo II
2009/2010
37 / 460
§1.1.3
Sucessões convergentes
Toda a sucessão convergente é limitada.
Observação
O recíproco não é verdadeiro. A sucessão de termo geral un = (−1)n é
limitada, mas não é convergente.
Todas as sucessões ilimitadas são divergentes.
Exemplo
Já vimos que a sucessão de termo geral un = n2 não é limitada. Logo
não é convergente.
César Silva (UBI)
Cálculo II
2009/2010
38 / 460
§1.1.3
Sucessões convergentes
As sucessões monótonas e limitadas são convergentes.
César Silva (UBI)
Cálculo II
2009/2010
39 / 460
Índice
1
Sucessões e séries de números reais
Sucessões de números reais
Definição e exemplos
Sucessões limitadas e sucessões monótonas
Sucessões convergentes
Subsucessões
Infinitamente grandes
Séries de números reais
Série de potências e série de Taylor
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
40 / 460
§1.1.4
Subsucessões
Se (un ) é uma sucessão e (nk ) é uma sucessão de números naturais
estritamente crescente, isto é,
n1 < n2 < . . . < nk < nk+1 < . . . ,
a sucessão
(unk ) = (un1 , un2 , . . . , unk , . . .)
diz-se uma subsucessão de (un ).
César Silva (UBI)
Cálculo II
2009/2010
41 / 460
§1.1.4
Subsucessões
As subsucessões de uma sucessão convergente são convergentes para o
mesmo limite da sucessão.
Exemplo
A sucessão de termo geral
un = (−1)n
é divergente pois tem duas subsucessões que convergem para valores
diferentes.
César Silva (UBI)
Cálculo II
2009/2010
42 / 460
§1.1.4
Subsucessões
Teorema de Bolzano-Weierstrass
Todas as sucessões limitadas têm subsucessões convergentes.
César Silva (UBI)
Cálculo II
2009/2010
43 / 460
Índice
1
Sucessões e séries de números reais
Sucessões de números reais
Definição e exemplos
Sucessões limitadas e sucessões monótonas
Sucessões convergentes
Subsucessões
Infinitamente grandes
Séries de números reais
Série de potências e série de Taylor
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
44 / 460
§1.1.5
Infinitamente grandes
Existem sucessões divergentes que, pelas propriedades de que gozam,
merecem ser estudadas. Essas sucessões designam-se por infinitamente
grandes.
Diz-se que uma sucessão (un ) tende para mais infinito ou que é um
infinitamente grande positivo, e escreve-se
un → +∞,
ou
lim un = +∞,
se para cada L > 0, existe p ∈ N tal que
un > L para qualquer natural p > N .
César Silva (UBI)
Cálculo II
2009/2010
45 / 460
§1.1.5
Infinitamente grandes
Se −un → +∞ diz-se que (un ) tende para menos infinito ou que a
sucessão (un ) é um infinitamente grande negativo e escreve-se
un → −∞,
ou
lim un = −∞.
Diz-se ainda que (un ) tende para infinito ou que (un ) é um
infinitamente grande se |un | → +∞ e escreve-se
un → ∞
César Silva (UBI)
ou
Cálculo II
lim un = ∞.
2009/2010
46 / 460
§1.1.5
Infinitamente grandes
Exemplos
A sucessão de termo geral
un = n
tende para mais infinito, a sucessão de termo geral
vn = −n
tende para menos infinito e a sucessão de termo geral
wn = (−1)n n
tende para infinito. A sucessão (wn ) é um exemplo de um infinitamente
grande que não é nem um infinitamente grande positivo, nem um
infinitamente grande negativo.
César Silva (UBI)
Cálculo II
2009/2010
47 / 460
§1.1.5
Infinitamente grandes
Observações
a) Os infinitamente grandes positivos e os infinitamente grandes
negativos, são infinitamente grandes. A sucessão de termo geral
wn = (−1)n n
mostra que o contrário nem sempre se verifica.
b) Resulta imediatamente da definição que se un → +∞, então (un ) é
limitada inferiormente.
c) Da definição resulta imediatamente que se (un ) e (vn ) são duas
sucessões tais que
un ≤ vn a partir de certa ordem e un → +∞,
então
César Silva (UBI)
vn → +∞.
Cálculo II
2009/2010
48 / 460
§1.1.5
Infinitamente grandes
Sejam (un ) e (vn ) duas sucessões de números reais.
a) Se un → +∞ e (vn ) tende para a ∈ R ou para +∞, então
(un + vn ) → +∞.
b) Se un → −∞ e (vn ) tende para a ∈ R ou para −∞, então
(un + vn ) → −∞.
c) Se un → ∞ e (vn ) tende para a ∈ R, então
(un + vn ) → ∞.
César Silva (UBI)
Cálculo II
2009/2010
49 / 460
§1.1.5
Infinitamente grandes
Vê-se assim que pode usar-se a regra do limite da soma desde que se
adoptem as convenções
(+∞) + a = +∞ = a + (+∞)
(−∞) + a = −∞ = a + (−∞)
∞+a =∞=a+∞
(+∞) + (+∞) = +∞
(−∞) + (−∞) = −∞
onde a é um número real qualquer.
César Silva (UBI)
Cálculo II
2009/2010
50 / 460
§1.1.5
Infinitamente grandes
Observação
Se
un → +∞
e
vn → −∞,
então nada se pode dizer sobre (un + vn ) pois em alguns casos
(un + vn ) é convergente, noutros é divergente. Por isso, não fazemos
nenhuma convenção para o símbolo
(+∞) + (−∞);
este símbolo designa-se por símbolo de indeterminação. Algo de
semelhante acontece com
∞ − ∞.
César Silva (UBI)
Cálculo II
2009/2010
51 / 460
§1.1.5
Infinitamente grandes
Sejam (un ) e (vn ) duas sucessões de números reais.
a) Se un → +∞ e se (vn ) tende para a > 0 ou tende para +∞, então
un .vn → +∞.
b) Se un → +∞ e se (vn ) tende para a < 0 ou tende para −∞, então
un .vn → −∞.
c) Se un → −∞ e se (vn ) tende para a > 0 ou tende para +∞, então
un .vn → −∞.
d) Se un → −∞ e se (vn ) tende para a < 0 ou tende para −∞, então
un .vn → +∞.
e) Se un → ∞ e (vn ) tende para a ∈ R \ {0} ou tende para ∞, então
un .vn → ∞.
César Silva (UBI)
Cálculo II
2009/2010
52 / 460
§1.1.5
Infinitamente grandes
Adoptando as convenções que se seguem, vê-se que se pode usar a
regra do limite do produto:
(+∞) × a = +∞ = a × (+∞) onde a ∈ R+
(−∞) × a = −∞ = a × (−∞) onde a ∈ R+
(+∞) × a = −∞ = a × (+∞) onde a ∈ R−
(−∞) × a = +∞ = a × (−∞) onde a ∈ R−
∞ × a = ∞ = a × ∞ onde a ∈ R \ {0}
(+∞) × (+∞) = +∞ = (−∞) × (−∞)
(+∞) × (−∞) = −∞ = (−∞) × (+∞)
∞×∞=∞
César Silva (UBI)
Cálculo II
2009/2010
53 / 460
§1.1.5
Infinitamente grandes
Observação
Não se faz nenhuma convenção para os símbolos
0 × (+∞),
0 × (−∞)
e
0 × ∞,
pois são símbolos de indeterminação.
César Silva (UBI)
Cálculo II
2009/2010
54 / 460
§1.1.5
Infinitamente grandes
Seja (un ) uma sucessão de termos não nulos.
a) Se un → ∞, então
1
→ 0.
un
b) Se un → 0, então
1
→ ∞.
un
c) Se un → 0 e un > 0 a partir de certa ordem, então
1
→ +∞.
un
d) Se un → 0 e un < 0 a partir de certa ordem, então
1
→ −∞.
un
César Silva (UBI)
Cálculo II
2009/2010
55 / 460
§1.1.5
Infinitamente grandes
A regra do limite quociente pode manter-se desde que se adoptem as
seguintes convenções
1
=0
∞
1
=∞
0
1
= +∞
0+
1
= −∞
0−
onde 0+ significa que
un → 0 e un > 0 a partir de certa ordem
e 0− significa que
un → 0 e un < 0 a partir de certa ordem.
César Silva (UBI)
Cálculo II
2009/2010
56 / 460
§1.1.5
Infinitamente grandes
Observação
Os símbolos
e
∞
∞
0
0
são símbolos de indeterminação.
César Silva (UBI)
Cálculo II
2009/2010
57 / 460
§1.1.5
Infinitamente grandes
Exemplo
a) Dado a ∈ R, consideremos a sucessão de termo geral un = an .
Se a > 1, então temos an → +∞.
Quando a = 1, então un = 1n = 1 pelo que a sucessão tende para 1.
Se a < −1, então an → ∞.
Para a = −1 obtemos a sucessão (−1)n que já vimos anteriormente.
Esta sucessão é divergente.
Se −1 < a < 1, então an → 0.
César Silva (UBI)
Cálculo II
2009/2010
58 / 460
§1.1.5
Infinitamente grandes
Exemplo (continuação)
a) (continuação) Assim,
lim an =
+∞
1
0
não existe
∞
César Silva (UBI)
Cálculo II
se a > 1
se a = 1
se −1 < a < 1
se a = −1
se a < −1
2009/2010
59 / 460
§1.1.5
Infinitamente grandes
Exemplo (continuação)
b) Calculemos lim (3n − 2n ). Como lim 3n = +∞ e lim 2n = +∞,
temos uma indeterminação do tipo
∞ − ∞.
No entanto, pondo em evidência 3n temos
n
n
n
lim (3 − 2 ) = lim 3
n
= lim 3
2n
1− n
3
1−
n 2
3
= +∞ × (1 − 0)
= +∞ × 1
= +∞
César Silva (UBI)
Cálculo II
2009/2010
60 / 460
§1.1.5
Infinitamente grandes
Exemplo (continuação)
c) Calculemos lim
2n + 5n+1
. Temos uma indeterminação pois
2n+1 + 5n
lim
2n + 5n+1
+∞
+∞ + (+∞)
=
.
=
n+1
n
2
+5
+∞ + (+∞)
+∞
Podemos levantar a indeterminação da seguinte forma
lim
2n
5n+1
+
2n+1 + 5n
César Silva (UBI)
2n 5n × 5
+
+ ×5
5n
5n
= lim n
=
lim
n
2 × 2 5n
2 × 2 + 5n
+ n
5n
5
n
2
+5
0+5
5
=
= lim n
=5
2
0×2+1
×2+1
5
2n
5n
Cálculo II
2009/2010
61 / 460
Índice
1
Sucessões e séries de números reais
Sucessões de números reais
Séries de números reais
Definição e exemplos
Séries de termos não negativos
Critério de Leibniz; convergência absoluta
Série de potências e série de Taylor
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
62 / 460
Índice
1
Sucessões e séries de números reais
Sucessões de números reais
Séries de números reais
Definição e exemplos
Séries de termos não negativos
Critério de Leibniz; convergência absoluta
Série de potências e série de Taylor
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
63 / 460
§1.2.1
Definição e exemplos
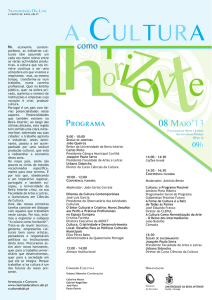
Paradoxo de Aquiles
Numa corrida entre um atleta velocista (Aquiles) e uma tartaruga é
dada uma vantagem inicial em termos de distância à tartaruga. Zenão
defende que Aquiles jamais alcançará a tartaruga porque quando
chegar ao ponto onde a tartaruga partiu, ela já terá percorrido uma
nova distância; e quando Aquiles percorrer essa nova distância, a
tartaruga já terá percorrido uma nova distância e assim sucessivamente.
Este famoso paradoxo foi proposto por Zenão da Elea no século V a.c..
César Silva (UBI)
Cálculo II
2009/2010
64 / 460
§1.2.1
Definição e exemplos
200 m
40 m
8m
Suponhamos que a vantagem inicial que Aquiles dá à tartaruga é
200 m, que a velocidade de Aquiles é 5 m/s e que a velocidade da
200
= 40 s para chegar ao ponto de
tartaruga é 1 m/s. Aquiles demora
5
onde a tartaruga partiu. Entretanto, a tartaruga percorreu
40
1 × 40 = 40 m. Em seguida, Aquiles demorou
= 8 s para chegar onde
5
a tartaruga estava e a tartaruga andou 1 × 8 = 8 m e assim
sucessivamente...
Será que Aquiles consegue alcançar a tartaruga?
César Silva (UBI)
Cálculo II
2009/2010
65 / 460
§1.2.1
Definição e exemplos
No primeiro ponto, o ponto inicial da tartaruga, Aquiles percorreu
200
metros; no ponto seguinte Aquiles percorreu (no total)
200
200 +
5
metros; no terceiro ponto Aquiles percorreu
200 200/5
200 200
+
= 200 +
+ 2
5
5
5
5
metros; no quarto ponto Aquiles percorreu
200 200 200
200 +
+ 2 + 3
5
5
5
metros; e assim sucessivamente. O paradoxo de Aquiles tem por detrás
aquela que, provavelmente, foi a primeira série da história!
200 +
César Silva (UBI)
Cálculo II
2009/2010
66 / 460
§1.2.1
Definição e exemplos
Se (an ) é uma sucessão de números reais, chamaremos série gerada por
(an ) à expressão
a1 + a2 + · · · + an + · · ·
obtida por adição (formal) dos termos da sucessão.
A cada série fica associada uma sucessão (sn ), a que se chama
sucessão das somas parciais de (an ), definida por
s1 = a1
s2 = a1 + a2
s3 = a1 + a2 + a3
..
.
sn = a1 + a2 + · · · + an
..
.
César Silva (UBI)
Cálculo II
2009/2010
67 / 460
§1.2.1
Definição e exemplos
A série diz-se convergente ou divergente conforme seja convergente
ou divergente a sucessão das somas parciais (sn ). Quando a série é
convergente, o limite da sucessão (sn ) designa-se por soma ou valor
da série.
Para representarmos a série (ou a sua soma, quando exista) usam-se os
símbolos
a1 + a2 + · · · + an + · · · ;
∞
X
n=1
an ;
X
an
e o contexto onde se usam estes símbolos indicará se estão a
representar a série ou a sua soma.
Dizemos que duas séries são da mesma natureza se são ambas
convergentes ou ambas divergentes.
César Silva (UBI)
Cálculo II
2009/2010
68 / 460
§1.2.1
Definição e exemplos
Observação
Em certos casos pode haver vantagem em que o primeiro valor que o
índice n toma seja um inteiro diferente de um, o que não traz nenhuma
dificuldade na teoria que irá ser exposta. Assim,
∞
X
1
n
−
1
n=2
∞
X
1
n
+
1
n=0
e
designam a mesma série, enquanto que
∞
X
1
n=6
n
designa uma série diferente.
César Silva (UBI)
Cálculo II
2009/2010
69 / 460
§1.2.1
Definição e exemplos
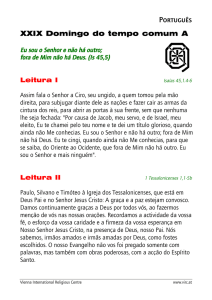
Exemplo
∞
X
2
, representamos abaixo os primeiros termos da
n(n
+ 1)
n=1
2
e da sucessão (sn ) das somas parciais
sucessão de termo geral an =
n(n + 1)
Para a série
2
s3
b
s2
b
a1
b
b
b
b
s10
s9
s8
s7
s6
s5
b
s4
b
b
b
s1
a2
b
a3
b
1
2
3
a4
b
4
a5
b
5
a6
a7
a8
a9
b
b
b
b
b
6
7
8
9
10
a10
Aparentemente a sucessão das somas parciais aproxima-se de 2...
César Silva (UBI)
Cálculo II
2009/2010
70 / 460
§1.2.1
Definição e exemplos
Exemplo (continuação)
De facto, atendendo a que
sn =
=
n
X
k=1
n
X
k=1
2
2
2
= −
conclui-se que
k(k + 1)
k k+1
2
k(k + 1)
2
2
−
k k+1
2
2
2 2 2 2 2
+ − + − + ···+ −
2 2 3 3 4
n n+1
2
= 2−
n+1
= 2−
e portanto
2
= 2.
n+1
Conclui-se que a série converge e tem soma s = 2.
César Silva (UBI)
s = lim sn = lim 2 −
Cálculo II
2009/2010
71 / 460
§1.2.1
Série harmónica
A série
Definição e exemplos
∞
X
1
n
n=1
designa-se por série harmónica. Consideremos ainda a respectiva sucessão
das somas parciais e tomemos a subsucessão dessa com termos com índice da
forma 2k , ou seja, a subsucessão (s2k ):
1
1
>
2
2
1 1
1
1
1
= s2 + + > + 2 × = 2 ×
3 4
2
4
2
1 1 1 1
1
1
1
= s22 + + + + > 2 × + 4 × = 3 ×
5 6 7 8
2
8
2
s2 = 1 +
s22
s23
k
k
Em geral temos s2k > . Como lim = +∞, concluímos que lim sn = +∞ e,
2
2
consequentemente, a série harmónica é divergente.
César Silva (UBI)
Cálculo II
2009/2010
72 / 460
§1.2.1
Definição e exemplos
Série geométrica
Dado r ∈ R, consideremos a série
∞
P
r n que habitualmente se designa
n=0
por série geométrica. A sucessão (sn )n∈N0 das somas parciais será,
neste exemplo, dada por
sn = 1 + r + · · · + r n =
Isto permite-nos concluir que
a série geométrica é
(
n+1
1 − r
1−r
n + 1
convergente
divergente
Além disso, quando |r| < 1 a sua soma é igual a
César Silva (UBI)
Cálculo II
se r 6= 1
se r = 1.
se |r| < 1,
se |r| ≥ 1.
1
.
1−r
2009/2010
73 / 460
§1.2.1
X
Definição e exemplos
X
Sejam
an e
bn duas séries convergentes cujas somas são A e B,
respectivamente. Então a série
X
(an + bn )
é convergente e a sua soma é A + B.
X
Seja
an uma série convergente cuja soma é A e seja λ um número
real. Então a série
X
(λan )
é convergente e a sua soma é λA.
César Silva (UBI)
Cálculo II
2009/2010
74 / 460
§1.2.1
Se
X
Definição e exemplos
X
bn é uma série divergente, então
X
bn são duas séries divergentes, a
an é uma série convergente e
é uma série divergente.
Note-se no entanto que, se
série
X
X
(an + bn )
an e
X
(an + bn )
pode ser convergente ou divergente.
César Silva (UBI)
Cálculo II
2009/2010
75 / 460
§1.2.1
Definição e exemplos
Exemplos
a) A série
+∞ X
n=1
1
1
+ n−1
n(n + 1)
5
+∞
X
n=1
é convergente porque as séries
1
n(n + 1)
e
n=1
também são convergentes. Além disso, como
+∞
X
n=1
+∞
X
1
5n−1
+∞
X1
2
1
=
,
n(n + 1)
2 n(n + 1)
n=1
podemos concluir que a sua soma é 1 pois já sabemos que soma da série
+∞
X
+∞
+∞
X 1
X 1
2
é 2. Quanto à série
=
é uma série geométrica
n−1
n(n + 1)
5
5n
n=1
n=1
n=0
1
5
1
= . Assim, a soma da série
de razão e a sua soma é
5
1 − 1/5
4
+∞ X
n=1
1
1
+ n−1
n(n + 1)
5
César Silva (UBI)
é 1+
5
9
= .
4
4
Cálculo II
2009/2010
76 / 460
§1.2.1
Definição e exemplos
Exemplos (continuação)
b) A série
+∞
X
n=1
7
3n−1
1
+
n
é divergente porque a série
+∞
X
n=1
7
3n−1
=
+∞
X
n=1
7
n−1
1
3
é convergente e a série
+∞
X
1
n
n=1
é divergente.
César Silva (UBI)
Cálculo II
2009/2010
77 / 460
§1.2.1
Definição e exemplos
Voltemos ao exemplo inicial de Aquiles e da tartaruga. A série
envolvida neste exemplo é
X
1
200 +∞
=
200
n
5
5
n=0
n=0
+∞
X
.
1
1
é convergente pois < 1 e a sua
5
5
Como série geométrica de razão
soma é
n 1
5
= , o ponto onde Aquiles ultrapassa a tartaruga é
1 − 1/5
4
200 ×
César Silva (UBI)
5
= 250 m.
4
Cálculo II
2009/2010
78 / 460
§1.2.1
Definição e exemplos
Nem sempre é fácil calcular a soma de uma série convergente, não se
conhecendo mesmo uma expressão para a soma de algumas séries
bastante simples. Assim, no que se segue, vamos estudar critérios que
nos permitem saber se uma série é ou não convergente, sem estarmos
preocupados com a soma no caso da série ser convergente.
César Silva (UBI)
Cálculo II
2009/2010
79 / 460
§1.2.1
Se
X
Definição e exemplos
an é uma série convergente, então lim an = 0.
P
Assim, se (an ) não converge para 0, a série an é divergente. Por
exemplo, a série
X n
n+1
n
é divergente porque a sucessão
converge para um.
n + 1 n∈N
No entanto, o recíproco deste teorema não é válido pois a série
harmónica
X1
n
1
convergir para zero.
é divergente apesar da sucessão
n n∈N
César Silva (UBI)
Cálculo II
2009/2010
80 / 460
§1.2.1
Sejam
X
an e
X
Definição e exemplos
bn duas séries. Suponhamos que existe N ∈ N tal que
an = bn para qualquer número natural n > N.
Então
são da mesma natureza.
César Silva (UBI)
X
an e
X
Cálculo II
bn
2009/2010
81 / 460
Índice
1
Sucessões e séries de números reais
Sucessões de números reais
Séries de números reais
Definição e exemplos
Séries de termos não negativos
Critério de Leibniz; convergência absoluta
Série de potências e série de Taylor
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
82 / 460
§1.2.2
Séries de termos não negativos
Nesta secção
Xvamos estudar séries de números reais não negativos, ou
seja, séries
an tais que
an ≥ 0 para cada n ∈ N.
Obviamente, pelo que já vimos anteriormente, a teoria que vamos
apresentar mantém-se válida se
an ≥ 0 a partir de certa ordem.
César Silva (UBI)
Cálculo II
2009/2010
83 / 460
§1.2.2
Séries de termos não negativos
Critério geral de comparação
Sejam
X
an e
a) Se
X
bn é convergente, então
b) Se
X
X
bn séries de termos não negativos tais que
an ≤ bn a partir de certa ordem.
an é divergente, então
César Silva (UBI)
X
X
an também é convergente.
bn também é divergente.
Cálculo II
2009/2010
84 / 460
§1.2.2
Séries de termos não negativos
Exemplos de aplicação do critério geral de comparação
a) Consideremos a série
∞
X
1
n=1
0≤
n2
. Uma vez que
2
2
1
≤
para qualquer número natural n
=
2
n
n(2n)
n(n + 1)
e, como vimos anteriormente, a série
∞
X
2
n(n + 1)
n=1
é convergente, podemos afirmar que a série
∞
X
1
n=1
César Silva (UBI)
n2
é convergente.
Cálculo II
2009/2010
85 / 460
§1.2.2
Séries de termos não negativos
Exemplos de aplicação do critério geral de comparação (continuação)
b) Estudemos a série
∞
X
1
n=1
Como
0≤
e a série
nα
, α ≥ 2.
1
1
≤ 2 para qualquer n ∈ N e qualquer α ≥ 2
nα
n
X 1
n2
é convergente, a série
X 1
nα
César Silva (UBI)
também é convergente quando α ⩾ 2.
Cálculo II
2009/2010
86 / 460
§1.2.2
Séries de termos não negativos
Exemplos de aplicação do critério geral de comparação (continuação)
c) A série
∞
X
1
n=1
pois
0≤
e a série
nα
é divergente para α ≤ 1
1
1
≤ α para cada n ∈ N e para cada α ≤ 1
n
n
X1
n
é divergente.
César Silva (UBI)
Cálculo II
2009/2010
87 / 460
§1.2.2
Séries de termos não negativos
Séries de Dirichlet
As séries
∞
X
1
n=1
nα
,
com α ∈ R, designam-se por séries de Dirichlet. Nos exemplos
anteriores já estudámos a natureza destas séries quando α ⩽ 1 e α ⩾ 2.
Quando 1 < α < 2, a série é convergente. Assim,
+∞
X
1
é
nα
n=1
César Silva (UBI)
(
convergente
divergente
Cálculo II
se α > 1,
se α ⩽ 1.
2009/2010
88 / 460
§1.2.2
Séries de termos não negativos
Critério do limite
X
X
Sejam
an e
bn séries de termos não negativos com bn 6= 0 para
cada n ∈ N.
an
a) Se lim
= ` com ` 6= 0 e ` 6= +∞, então as séries
bn
b) Se lim
c) Se lim
X
X
an e
bn são da mesma natureza.
X
an
= 0 e a série
bn é convergente, então a série
bn
X
an também é convergente.
X
an
= +∞ e a série
bn é divergente, então a série
bn
César Silva (UBI)
X
an também é divergente.
Cálculo II
2009/2010
89 / 460
§1.2.2
Séries de termos não negativos
Exemplos de aplicação do critério do limite
a) A série
∞
X
3n2 + 4
é convergente porque
2n4 + 3n + 1
n=1
3n2 + 4
≥0 e
2n4 + 3n + 1
e
3n2 + 4
4
3
3n4 + 4n2
=
lim 2n + 3n + 1 = lim 4
1
2n + 3n + 1
2
n2
∞
X
1
n=1
César Silva (UBI)
1
≥ 0 para qualquer n ∈ N,
n2
n2
é convergente.
Cálculo II
2009/2010
90 / 460
§1.2.2
Séries de termos não negativos
Exemplos de aplicação do critério do limite (continuação)
b) Consideremos a série
sen
∞
X
1
sen . É óbvio que
n
n=1
1
≥0 e
n
1
≥ 0 para cada n ∈ N.
n
Como
lim
e
∞
X
1
n
n=1
é divergente,
César Silva (UBI)
∞
X
n=1
sen
sen
1
n
1
n =1
1
também é divergente.
n
Cálculo II
2009/2010
91 / 460
§1.2.2
Séries de termos não negativos
Critério de D’Alembert
Seja
X
an uma série de termos positivos tal que
a) Se λ < 1, então
b) Se λ > 1, então
César Silva (UBI)
lim
X
X
an+1
= λ.
an
an é convergente.
an é divergente.
Cálculo II
2009/2010
92 / 460
§1.2.2
Séries de termos não negativos
Exemplos de aplicação do critério de D’Alembert
a) Provemos que a série
X 2n n!
nn
é convergente. É óbvio que
2n n!
> 0 qualquer que seja n ∈ N.
nn
Como
2n+1 (n + 1)!
2
2
2nn
(n + 1)n+1
= lim
< 1,
= lim
lim
n
n =
n
2 n!
(n + 1)
(1 + 1/n)
e
nn
pelo critério de D’Alembert, a série
César Silva (UBI)
Cálculo II
X 2n n!
nn
é convergente.
2009/2010
93 / 460
§1.2.2
Séries de termos não negativos
Exemplos de aplicação do critério de D’Alembert (continuação)
b) A série
é divergente. Como
X
n3n
n3n > 0 para cada n ∈ N
e
(n + 1) 3n+1
n+1
= 3 > 1,
= lim 3
n 3n
n
pelo critério de D’Alembert a série
lim
é divergente.
César Silva (UBI)
X
n3n
Cálculo II
2009/2010
94 / 460
§1.2.2
Séries de termos não negativos
Critério de Cauchy
Seja
X
an uma série de termos não negativos tal que
a) Se λ < 1, então
b) Se λ > 1, então
César Silva (UBI)
lim
X
X
√
n
an = λ.
an é convergente.
an é divergente.
Cálculo II
2009/2010
95 / 460
§1.2.2
Séries de termos não negativos
Exemplos de aplicação do critério de Cauchy
a) Vejamos que a série
X n + 1 n2
n
é divergente. Como
n+1
n
n2
≥ 0 qualquer que seja n ∈ N
e
lim
s
n
n+1
n
n2
= lim
n+1
n
pelo critério de Cauchy, a série
César Silva (UBI)
n
= lim 1 +
X n + 1 n2
Cálculo II
n
1
n
n
= e > 1,
é divergente.
2009/2010
96 / 460
§1.2.2
Séries de termos não negativos
Exemplos de aplicação do critério de Cauchy (continuação)
b) À série
X
n 3n
também podemos aplicar o critério de Cauchy. Como
n 3n ≥ 0 para cada n ∈ N
e
lim
√
√
n
n 3n = lim 3 n n = 3,
o critério de Cauchy garante-nos que
é divergente.
César Silva (UBI)
X
n 3n
Cálculo II
2009/2010
97 / 460
Índice
1
Sucessões e séries de números reais
Sucessões de números reais
Séries de números reais
Definição e exemplos
Séries de termos não negativos
Critério de Leibniz; convergência absoluta
Série de potências e série de Taylor
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
98 / 460
§1.2.3
Critério de Leibniz; convergência absoluta
Critério de Leibniz
Se (an ) é uma sucessão decrescente convergente para zero, então a série
+∞
X
(−1)n an
n=1
é convergente.
César Silva (UBI)
Cálculo II
2009/2010
99 / 460
§1.2.3
Critério de Leibniz; convergência absoluta
Observações
a) Se (an ) é uma sucessão decrescente convergente para zero, então
an ≥ 0 para qualquer n ∈ N.
b) As séries da forma
+∞
X
(−1)n an
n=1
designam-se por séries alternadas.
c) O critério de Leibniz também é válido para séries da forma
+∞
X
n+1
(−1)
an
ou da forma
n=1
César Silva (UBI)
+∞
X
(−1)n an .
n=k
Cálculo II
2009/2010
100 / 460
§1.2.3
Critério de Leibniz; convergência absoluta
Exemplos
1
é decrescente pois
n
1
1
n − (n + 1)
−1
an+1 − an =
− =
=
≤0
n+1 n
n(n + 1)
n(n + 1)
a) A sucessão de termo geral an =
para qualquer n ∈ N. Além disso,
lim an = lim
n→+∞
n→+∞
1
1
=
= 0.
n
+∞
Pelo critério de Leibniz, a série
+∞
X
(−1)n
n
n=1
é convergente.
César Silva (UBI)
Cálculo II
2009/2010
101 / 460
§1.2.3
Critério de Leibniz; convergência absoluta
Exemplos (continuação)
b) Estudemos a natureza da série
+∞
X
(−1)n
. Como
n2
n=1
1
n2 − (n + 1)2
n2 − (n2 + 2n + 1)
−2n − 1
1
−
=
=
= 2
≤0
2
2
2
2
2
2
(n + 1)
n
n (n + 1)
n (n + 1)
n (n + 1)2
1
para qualquer n ∈ N, ou seja, a sucessão de termo geral an = 2 é
n
decrescente, e
1
1
1
=
=
= 0,
lim
n→+∞ n2
(+∞)2
+∞
o critério de Leibniz garante-nos que a série
é convergente.
César Silva (UBI)
+∞
X
(−1)n
n2
n=1
Cálculo II
2009/2010
102 / 460
§1.2.3
Critério de Leibniz; convergência absoluta
Exemplos (continuação)
c) Estudemos a natureza da série
+∞
X
(−1)n an com an =
n=1
n+1
. A
n
sucessão (an ) é decrescente pois
an+1 − an =
=
=
=
para qualquer n ∈ N.
César Silva (UBI)
≤
n+2 n+1
−
n+1
n
(n + 2)n − (n + 1)2
n(n + 1)
2
n + 2n − (n2 + 2n + 1)
n(n + 1)
−1
n(n + 1)
0
Cálculo II
2009/2010
103 / 460
§1.2.3
Critério de Leibniz; convergência absoluta
Exemplos (continuação)
c) (continuação) No entanto, como
n+1
1
n 1
= lim
+ = lim 1 + = 1,
n→+∞
n→+∞ n
n
n n→+∞
n
lim an = lim
n→+∞
não podemos aplicar o critério de Leibniz pois lim an 6= 0. Mas se
lim an = 1, a sucessão de termo geral (−1)n an é divergente pois a
subsucessão dos termos de ordem par converge para 1 e a
subsucessão dos termos de ordem ímpar converge para −1. Assim,
a série
+∞
+∞
X
X
n+1
é divergente.
(−1)n an =
(−1)n
n
n=1
n=1
César Silva (UBI)
Cálculo II
2009/2010
104 / 460
§1.2.3
Uma série
módulos
+∞
X
Critério de Leibniz; convergência absoluta
an diz-se absolutamente convergente se a série do
n=1
+∞
X
n=1
|an | é convergente.
As séries absolutamente convergentes são convergentes, ou seja, se
+∞
X
n=1
então
+∞
X
|an | é convergente,
an também é convergente.
n=1
César Silva (UBI)
Cálculo II
2009/2010
105 / 460
§1.2.3
Critério de Leibniz; convergência absoluta
Observação
O recíproco do resultado anterior não se verifica. A série
+∞
X
(−1)n
n
n=1
é convergente, mas a sua série dos módulos
+∞
n X 1
(−1) =
n n
n=1
n=1
+∞
X é a série harmónica que já vimos ser divergente.
As séries convergentes cuja série dos módulos é divergente dizem-se
simplesmente convergentes, semi-convergentes ou
condicionalmente convergentes.
César Silva (UBI)
Cálculo II
2009/2010
106 / 460
§1.2.3
Critério de Leibniz; convergência absoluta
Exemplos
+∞
X
(−1)n
é
n2
n=1
convergente. Uma outra forma de vermos que é convergente é através da
série do módulos:
a) Através do critério de Leibniz concluímos que a série
+∞ +∞
X
X
(−1)n 1
=
.
n2 n2
n=1
n=1
+∞
X
1
é uma série de Dirichlet com α = 2 e, portanto, é
2
n
n=1
convergente. Logo
Ora a série
+∞
X
(−1)n
n2
n=1
é absolutamente convergente e, portanto, é convergente.
César Silva (UBI)
Cálculo II
2009/2010
107 / 460
§1.2.3
Critério de Leibniz; convergência absoluta
Exemplos (continuação)
b) Estudemos a natureza da série
n ∈ N, se tem
+∞
X
n=1
n2
cos n
. Como, para qualquer
+ 2n + 3
1
1
|cos n|
cos n
=
= 2
≤ 2
0≤ 2
2
n + 2n + 3
n + 2n + 3
n + 2n + 3
n
+∞
X
1
e a série
é convergente, pelo critério geral de comparação, a série
2
n
n=1
+∞ X
cos n
n2 + 2n + 3 é convergente. Logo
n=1
+∞
X
cos n
2 + 2n + 3
n
n=1
é absolutamente convergente e, por conseguinte, é convergente.
César Silva (UBI)
Cálculo II
2009/2010
108 / 460
§1.2.3
Critério de Leibniz; convergência absoluta
Exemplos (continuação)
c) Consideremos a série
+∞
X
(−1)n
n=1
n+1
. A sua série dos módulos é
n2 + 2
+∞
+∞ X
X
n+1
n n+1 =
(−1) 2
2
n +2
n=1
e, como
n=1
n +2
n+1
2 +2
n2 (1 + 1/n)
1 + 1/n
n2 + n
n
= lim
= lim
= 1,
lim
= lim
2
1
n→+∞ n2 (1 + 2/n)
n→+∞ 1 + 2/n
n→+∞
n→+∞ n + 2
n
+∞
+∞
X
X
n+1
1
pelo critério do limite, as série
e
, por serem séries de termos
n2 + 2
n
n=1
n=1
positivos, são da mesma natureza. Como a série harmónica é divergente, a série
+∞
X
n+1
n=1
n2 + 2
também é divergente.
César Silva (UBI)
Cálculo II
2009/2010
109 / 460
§1.2.3
Critério de Leibniz; convergência absoluta
Exemplos (continuação)
c) (continuação) Acabámos de ver que a série dos módulos de
+∞
X
(−1)n
n=1
+∞
divergente. Vejamos, usando o critério de Leibniz, que a série
X
n+1
é
n2 + 2
(−1)n
n=1
convergente. Como
lim
n→+∞
n+1
é
n2 + 2
n(1 + 1/n)
1 + 1/n
n+1
1+0
= lim
= lim
=
=0
n→+∞ n2 (1 + 2/n2 )
n→+∞ n(1 + 2/n2 )
n2 + 2
+∞(1 + 0)
e
n+2
n+1
n2 + 3n − 1
− 2
= ··· = −
≤0
2
(n + 1) + 2
n +2
((n + 1)2 + 2)(n2 + 1)
para qualquer n ∈ N, pelo critério de Leibniz a série
+∞
X
n=1
(−1)n
n+1
n2 + 2
é convergente. Assim, esta série é simplesmente convergente.
César Silva (UBI)
Cálculo II
2009/2010
110 / 460
Índice
1
Sucessões e séries de números reais
Sucessões de números reais
Séries de números reais
Série de potências e série de Taylor
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
111 / 460
§1.3 Série de potências e série de Taylor
Sejam a0 , a1 , . . . , an , . . . os termos de uma sucessão e a um número real.
A série
+∞
X
n=0
an (x − a)n
= a0 + a1 (x − a) + a2 (x − a)2 + · · · + an (x − a)n + · · ·
designa-se por série de potências de x − a. Dizemos que a série está
centrada em a e que os números an são os coeficientes da série.
As séries
+∞
X
xn
,
n!
n=0
+∞
X
n
(x − 2)n
2
n
+
1
n=0
e
+∞
X
n=0
n(x − π)n
são séries de potências centradas, respectivamente, em 0, 2 e π.
César Silva (UBI)
Cálculo II
2009/2010
112 / 460
§1.3 Série de potências e série de Taylor
Observações
a) Há séries de potências que não começam em zero. Por exemplo, a série
+∞
+∞
X
1 n X xn
x =
n
n
n=1
n=1
tem de começar em um. Obviamente, tudo o que vamos estudar nesta
secção contínua válido para estas séries.
b) Quando x = a e n = 0 obtemos (x − a)n = 00 que, apesar de não estar
definido, no contexto das séries convencionamos ser igual a 1.
c) Uma série de potências pode convergir para determinados valores de x e
divergir para outros.
d) Para x = a, tendo em conta a observação b), a série é sempre convergente.
Aliás, se x = a temos
+∞
X
an (x − a)n = a0 .
n=0
César Silva (UBI)
Cálculo II
2009/2010
113 / 460
§1.3 Série de potências e série de Taylor
Exemplos de séries de potências
+∞
X
xn
. Aplicando o critério de
n+1
n=0
D’Alembert à série dos módulos
+∞ +∞
X
X
xn |x|n
=
n + 1
n+1
n=0
n=0
a) Estudemos a série de potências
(que é obviamente uma série de termos positivos) temos
n+1
lim
n→+∞
|x|
1+
n + 2 = lim n + 1 |x| = lim
n
n→+∞
n→+∞ n + 2
|x|
1+
n+1
1
n |x| = 1 . |x| = |x|
2
n
+∞
X
xn
é absolutamente convergente para |x| < 1.
e, portanto, a série
n+1
n=0
César Silva (UBI)
Cálculo II
2009/2010
114 / 460
§1.3 Série de potências e série de Taylor
Exemplos de séries de potências (continuação)
a) (continuação) Se |x| > 1, temos
lim
n→+∞
e, portanto,
|x|n+1
n + 2 = |x| > 1
|x|n
n+1
n+1
n
|x|
|x|
≥
n+2
n+1
a partir de certa ordem. Daqui concluímos que para |x| > 1 a sucessão de
xn
termo geral
não converge para zero e, consequentemente, a série
n+1
+∞
X
xn
é divergente quando |x| > 1.
n+1
n=0
César Silva (UBI)
Cálculo II
2009/2010
115 / 460
§1.3 Série de potências e série de Taylor
Exemplos de séries de potências (continuação)
a) (continuação) Falta ver o que acontece quando |x| = 1. Se x = 1, então
obtemos a série
+∞
+∞
X
X
1
1
=
,
n + 1 n=1 n
n=0
isto é, obtemos a série harmónica que já vimos ser divergente. Para
x = −1, temos a série alternada
∞
∞
n+1
n
X
X
(−1)
(−1)
=
n+1
n
n=1
n=0
que é convergente (ver os exemplos do critério de Leibniz). Assim, esta
série é convergente para x ∈ [−1, 1[ e é divergente para
x ∈ ] − ∞, −1[ ∪ [1, +∞[.
César Silva (UBI)
Cálculo II
2009/2010
116 / 460
§1.3 Série de potências e série de Taylor
Exemplos de séries de potências (continuação)
b) Consideremos a série de potências
+∞ n
X
x
. Aplicando o critério de
n!
n=0
D’Alembert à série dos módulos
+∞ n +∞
n
X
X
x |x|
=
n! n!
n=0
n=0
(que é obviamente uma série de termos positivos) tem-se
n+1
|x|
1
n!
(n + 1)!
|x| = lim
|x| = 0 . |x| = 0,
= lim
lim
n
n→+∞ n + 1
n→+∞ (n + 1)!
n→+∞
|x|
n!
+∞ n
X
x
o que permite concluir que a série
é absolutamente convergente
n!
n=0
para todo o x ∈ R.
César Silva (UBI)
Cálculo II
2009/2010
117 / 460
§1.3 Série de potências e série de Taylor
Exemplos de séries de potências (continuação)
c) Estudemos a natureza da série
série dos módulos
lim
n→+∞
nxn . Aplicando o critério de Cauchy à
n=0
+∞
X
n=0
temos
+∞
X
|nxn | =
+∞
X
n=0
n
n |x|
q
√
n
n |x|n = lim n n |x| = 1 . |x| = |x| .
n→+∞
Assim, a série é absolutamente convergente para |x| < 1. Para |x| > 1 a
série é divergente. Para |x| = 1 a série também é divergente. Portanto, a
série
+∞
X
nn xn
n=0
converge se x ∈ ] − 1, 1[ e diverge se x ∈ ] − ∞, −1] ∪ [1, +∞[.
César Silva (UBI)
Cálculo II
2009/2010
118 / 460
§1.3 Série de potências e série de Taylor
Sejam a0 , a1 , . . . , an , . . . os termos de uma sucessão e a um número
real. Então
a) existe um número real r ≥ 0 tal que a série de potências
+∞
X
n=0
an (x − a)n
converge absolutamente quando |x − a| < r e diverge quando
|x − a| > r; ou
b) a série de potências
+∞
X
n=0
an (x − a)n
converge absolutamente para qualquer x ∈ R.
César Silva (UBI)
Cálculo II
2009/2010
119 / 460
§1.3 Série de potências e série de Taylor
O número r do resultado anterior designa-se por raio de
convergência da série de potências
+∞
X
n=0
an (x − a)n .
Se estivermos no caso da alínea b) costuma-se fazer r = +∞.
O conjunto dos x para os quais a série é convergente designa-se por
intervalo de convergência da série de potências
+∞
X
n=0
an (x − a)n .
Note-se que o intervalo de convergência de uma série de potências é um
dos quatro intervalos seguintes:
]a − r, a + r[ ,
César Silva (UBI)
[a − r, a + r[ ,
]a − r, a + r]
Cálculo II
ou
[a − r, a + r] .
2009/2010
120 / 460
§1.3 Série de potências e série de Taylor
Observações
a) Do critério de D’Alembert resulta que,
an .
se o limite existe, então r = lim n→+∞ an+1 De facto, supondo x 6= a e an 6= 0 para qualquer n ∈ N, como
an+1 (x − a)n+1 = lim |an+1 | |x − a| = λ |x − a| ,
lim
n→+∞ an (x − a)n n→+∞ |an |
pelo critério de D’Alembert, a série é absolutamente convergente se
λ |x − a| < 1 ⇔ |x − a| < 1/λ.Além disso, se λ |x − a| > 1 ⇔ |x − a| 1/λ,a
série é divergente porque (an (x − a)n )n∈N não converge para zero.
César Silva (UBI)
Cálculo II
2009/2010
121 / 460
§1.3 Série de potências e série de Taylor
Observações (continuação)
b) De forma análoga prova-se, usando o critério de Cauchy, que,
se o limite existe, então
r=
1
lim
n→+∞
César Silva (UBI)
Cálculo II
q
n
.
|an |
2009/2010
122 / 460
§1.3 Série de potências e série de Taylor
Exemplos
+∞
X
xn
e
n+1
n=0
provámos que o raio de convergência desta série é r = 1 e que o seu
intervalo de convergência é [−1, 1[.
a) Já estudamos a natureza da série de potências
b) Num exemplo anterior vimos o raio de convergência da série de
+∞
X xn
é r = +∞ e, consequentemente, o seu intervalo de
potências
n!
n=0
convergência é ] − ∞, +∞[= R.
c) Também já vimos que a série
+∞
X
nxn tem como raio de
n=0
convergência r = 1 e o seu intervalo de convergência é ] − 1, 1[.
César Silva (UBI)
Cálculo II
2009/2010
123 / 460
§1.3 Série de potências e série de Taylor
Exemplos (continuação)
d) Estudemos a série de potências
lim
n→+∞
+∞
X
(x − 1)n
. Como
n2 2n
n=1
1
(n + 1)2 2n+1
n2 2n
= lim
= lim 2(1+1/n)2 = 2,
1
n→+∞
n→+∞
n2
2n
(n + 1)2 2n+1
concluimos que a série é absolutamente convergente quando
|x − 1| < 2 ⇔ x − 1 < 2 ∧ x − 1 > −2 ⇔ ⇔ x ∈ ] − 1, 3[
e é divergente quando x ∈ ] − ∞, −1[ ∪ ]3, +∞[. Falta ver o que
acontece quando x = −1 e x = 3.
César Silva (UBI)
Cálculo II
2009/2010
124 / 460
§1.3 Série de potências e série de Taylor
Exemplos (continuação)
d) (continuação) Quando x = 3 temos
+∞
+∞
+∞
X
X
X
2n
1
(3 − 1)n
=
=
2 2n
2 2n
2
n
n
n
n=0
n=0
n=0
que é uma série de Dirichlet convergente. Quando x = −1 vem
+∞
+∞
+∞
+∞
X
X
X
X
(−1 − 1)n
(−2)n
(−1)n 2n
(−1)n
=
=
=
,
n2 2 n
n2 2 n
n2 2 n
n2
n=0
n=0
n=0
n=0
e esta série é convergente. Para vermos isso podemos usar o critério de
Leibniz ou então ver que a sua série dos módulos
+∞ +∞
+∞
X
X
(−1)n |(−1)n | X 1
=
=
n2 n2
n2
n=0
n=0
n=0
é convergente. Assim, o raio de convergência da série
e o seu intervalo de convergência é [−1, 3].
César Silva (UBI)
Cálculo II
+∞
X
(x − 1)n
ér=2
n2 2 n
n=1
2009/2010
125 / 460
§1.3 Série de potências e série de Taylor
Exemplos (continuação)
e) Consideremos a série de potências
+∞
X
n
(x − 2)n .
2+1
n
n=1
Como
n
n3 + 2n2 + 2n
+1
lim
=1
= lim 3
n+1
n + n2 + n + 1
(n + 1)2 + 1
n2
concluímos que, se |x − 2| < 1, isto é, se x ∈ ]1, 3[, a série é absolutamente
converge. Se |x − 2| > 1 a série diverge.
César Silva (UBI)
Cálculo II
2009/2010
126 / 460
§1.3 Série de potências e série de Taylor
Exemplos (continuação)
e) (continuação) Se x = 3, obtemos a série
+∞
X
+∞
X
n
n
n
(3 − 2) =
,
2+1
2+1
n
n
n=1
n=1
que é uma série de termos positivos, pelo que estudaremos a sua natureza
recorrendo ao critério do limite, fazendo a comparação com a série
harmónica. Como
lim
n2
n/(n2 + 1)
= lim 2
=1
1/n
n +1
concluímos que para x = 3 a série tem a mesma natureza da série
harmónica e, portanto, diverge.
César Silva (UBI)
Cálculo II
2009/2010
127 / 460
§1.3 Série de potências e série de Taylor
Exemplos (continuação)
e) (continuação) Além disso, se x = 1 obtemos a série
+∞
X
n=1
(−1)n
n
. A
n2 + 1
n
é decrescente visto que
2
n +1
n
−n2 − n + 1
n+1
− 2
= 2
< 0 para todo o n ∈ N.
2
(n + 1) + 1 n + 1
(n + 2n + 2)(n2 + 1)
sucessão de termo geral an =
Por outro lado, uma vez que temos
lim
n→+∞
1
n
1
n
= lim
= lim
=
=0
n2 + 1 n→+∞ n2 (1 + 1/n2 ) n→+∞ n(1 + 1/n2 )
+∞
podemos concluir pelo critério de Leibniz que, para x = 1, a série
converge. Assim, a série converge para x ∈ [1, 3[ e diverge para
x ∈ ] − ∞, 1[ ∪ [3 + ∞[.
César Silva (UBI)
Cálculo II
2009/2010
128 / 460
§1.3 Série de potências e série de Taylor
No intervalo de convergência I de uma série de potências
+∞
X
n=0
an (x − a)n
fica bem definida a função f : I → R dada por
f (x) =
+∞
X
n=0
an (x − a)n
= a0 + a1 (x − a) + a2 (x − a)2 + · · · + an (x − a)n + · · · .
César Silva (UBI)
Cálculo II
2009/2010
129 / 460
§1.3 Série de potências e série de Taylor
Propriedades da função f (x) =
Seja
+∞
X
n=0
P+∞
n=0
an (x − a)n
an (x − a)n
uma série de potências com raio de convergência r e com intervalo de
convergência I. Consideremos a função f : I → R definida por
f (x) =
+∞
X
n=0
an (x − a)n .
Então
a) a função f é contínua em I;
b) a função f é de classe C ∞ em ]a − r, a + r[;
César Silva (UBI)
Cálculo II
2009/2010
130 / 460
§1.3 Série de potências e série de Taylor
Propriedades da função f (x) =
P+∞
n=0
c) para cada x ∈ ]a − r, a + r[ tem-se
f 0 (x) =
+∞
X
n=0
an (x − a)n (continuação)
[an (x − a)n ]0 ,
ou seja,
f 0 (x) =
+∞
X
nan (x − a)n−1
+∞
X
(n + 1)an+1 (x − a)n
n=1
=
n=0
= a1 + 2a2 (x − a) + 3a3 (x − a)2 + · · · + nan (x − a)n−1 + · · ·
César Silva (UBI)
Cálculo II
2009/2010
131 / 460
§1.3 Série de potências e série de Taylor
Propriedades da função f (x) =
P+∞
n=0
d) para cada x ∈ ]a − r, a + r[ tem-se
Z
" +∞
X
an (x − a)n (continuação)
#
(x − a)n+1
an
f (x) dx =
+C
n+1
n=0
a2
a1
= C + a0 (x − a) + (x − a)2 + (x − a)3 + · · · +
2
3
an
n+1
+
(x − a)
+ ···
n+1
ou seja, a função g dada por
g(x) =
+∞
X
n=0
an
(x − a)n+1
n+1
é uma primitiva de f .
César Silva (UBI)
Cálculo II
2009/2010
132 / 460
§1.3 Série de potências e série de Taylor
Exemplos
a) Seja f : R \ {1} → R a função dada por
f (x) =
1
.
1−x
Quando estudámos a série geométrica vimos que para cada
x ∈ ] − 1, 1[ temos
+∞
X
n=0
xn =
1
= f (x).
1−x
Verificamos então que f admite um desenvolvimento em série de
potências de x no intervalo ] − 1, 1[.
César Silva (UBI)
Cálculo II
2009/2010
133 / 460
§1.3 Série de potências e série de Taylor
Exemplos (continuação)
b) Como
1
1−x
0
=
10 (1 − x) − 1(1 − x)0
0(1 − x) − 1(−1)
1
=
=
,
2
2
(1 − x)
(1 − x)
(1 − x)2
usando o exemplo anterior e uma das propriedades anteriores,
temos, para x ∈] − 1, 1[,
1
=
(1 − x)2
=
1
1−x
+∞
X
0
nxn−1 =
n=1
César Silva (UBI)
=
Cálculo II
+∞
X
(xn )0
n=0
+∞
X
(n + 1)xn
n=0
2009/2010
134 / 460
§1.3 Série de potências e série de Taylor
Exemplos (continuação)
c) O estudo que fizemos da série geométrica permite-nos concluir,
para cada x ∈ ] − 1, 1[, que
+∞
+∞
X
X
1
1
=
=
(−x)n =
(−1)n xn .
1+x
1 − (−x) n=0
n=0
1
tem-se
1+x
+∞
X
xn+1
ln(1 + x) = C +
(−1)n
n+1
n=0
Como ln(1 + x) é uma primitiva de
para algum C ∈ R. Como ln(1 + 0) = 0, tem-se C = 0 e, por
conseguinte,
ln(1 + x) =
+∞
X
(−1)n
n=0
César Silva (UBI)
xn+1
para qualquer x ∈] − 1, 1[.
n+1
Cálculo II
2009/2010
135 / 460
§1.3 Série de potências e série de Taylor
Exemplos (continuação)
d) Usando novamente a série geométrica, para x ∈ ] − 1, 1[, temos
+∞
+∞
X
X
1
1
2 n
=
=
(−x
)
=
(−1)n x2n
1 + x2
1 − (−x2 ) n=0
n=0
e, pelas propriedades estudadas, tem-se para x ∈ ] − 1, 1[
arc tg x = C +
+∞
X
(−1)n
n=0
x2n+1
2n + 1
para algum C ∈ R. Como arc tg 0 = 0, concluímos que C = 0 e,
portanto,
arc tg x =
+∞
X
(−1)n
n=0
César Silva (UBI)
x2n+1
para x ∈ ] − 1, 1[.
2n + 1
Cálculo II
2009/2010
136 / 460
§1.3 Série de potências e série de Taylor
Seja f : D → R uma função de classe C ∞ . Se f puder ser escrita na
forma
f (x) =
+∞
X
n=0
an (x − a)n
= a0 + a1 (x − a) + a2 (x − a)2 + · · · + an (x − a)n + · · ·
para x ∈ ]a − r, a + r[ ⊆ D, com r > 0, dizemos que f admite uma
representação em série de potências de x − a no intervalo
]a − r, a + r[. As funções que admitem uma representação em série de
potências num intervalo não degenerado da forma ]a − r, a + r[
dizem-se funções analíticas no ponto a.
Dada uma função analítica num ponto a, como calcular os coeficientes
an ?
César Silva (UBI)
Cálculo II
2009/2010
137 / 460
§1.3 Série de potências e série de Taylor
Se para cada x ∈ ]a − r, a + r[ se tem
f (x) = a0 + a1 (x − a) + a2 (x − a)2 + · · · + an (x − a)n + · · ·
então f (a) = a0 . Derivando obtemos
f 0 (x) = a1 + 2a2 (x − a) + 3a3 (x − a)2 + · · · + nan (x − a)n−1 + · · ·
e, portanto, f 0 (a) = a1 . Derivando novamente obtemos
f 00 (x) = 2 a2 + 3 × 2 a3 (x − a) + · · · + n × (n − 1) an (x − a)n−2 + · · ·
o que implica f 00 (a) = 2 a2 . Iterando o processo obtemos
f (n) (a) = n! an ⇔ an =
f (n) (a)
n!
para cada n ∈ N0 (com f (0) = f ). Assim,
f (x) = f (a) +
f 0 (a)
f 00 (a)
f (n) (a)
(x − a) +
(x − a)2 + · · · +
(x − a)n + · · ·
1!
2!
n!
César Silva (UBI)
Cálculo II
2009/2010
138 / 460
§1.3 Série de potências e série de Taylor
Fórmula de Taylor (com resto de Lagrange)
Sejam I um intervalo,
f: I →R
uma função de classe C n , n + 1 vezes diferenciável em int I e a um
ponto de I. Para cada x ∈ I \ {a}, existe c estritamente entre a e x tal
que
f (x) = f (a) + f 0 (a) (x − a) +
f (n) (a)
f 00 (a)
(x − a)2 + · · · +
(x − a)n + Rn (x)
2!
n!
onde
Rn (x) =
César Silva (UBI)
f (n+1) (c)
(x − a)n+1 .
(n + 1)!
Cálculo II
2009/2010
139 / 460
§1.3 Série de potências e série de Taylor
Ao polinómio
pn (x) = f (a) + f 0 (a) (x − a) +
f (n) (a)
f 00 (a)
(x − a)2 + · · · +
(x − a)n
2!
n!
chamamos polinómio de Taylor de grau n da função f em torno de
x=aea
f (n+1) (c)
Rn (x) =
(x − a)n+1
(n + 1)!
resto Lagrange de ordem n da função f em torno de x = a.
Se a = 0 a fórmula de Taylor designa-se por fórmula de MacLaurin
e o polinómio de Taylor designa-se por polinómio de MacLaurin.
César Silva (UBI)
Cálculo II
2009/2010
140 / 460
§1.3 Série de potências e série de Taylor
Dada uma função f : D → R de classe C ∞ , designa-se por série de
Taylor de f em a a série
+∞
X
f (n) (a)
(x − a)n
n!
n=0
= f (a) +
f 00 (a)
f (n) (a)
f 0 (a)
(x − a) +
(x − a)2 + · · · +
(x − a)n + · · ·
1!
2!
n!
No caso particular em que a = 0 obtemos a série
+∞
X
f (n) (0) n
f 0 (0)
f 00 (0) 2
f (n) (0) n
x = f (0) +
x+
x + ··· +
x + ···
n!
1!
2!
n!
n=0
que se designa por série de MacLaurin de f .
César Silva (UBI)
Cálculo II
2009/2010
141 / 460
§1.3 Série de potências e série de Taylor
Pelo que foi visto anteriormente, uma função f de classe C ∞ é
analítica num ponto a interior ao domínio se existe r > 0 tal que
f (x) =
+∞
X
f (n) (a)
(x − a)n
n!
n=0
para cada x ∈ ]a − r, a + r[. Assim, da fórmula de Taylor resulta
imediatamente o seguinte resultado.
Seja f : D → R uma função de classe C ∞ e seja Rn (x) o resto de
Lagrange de ordem n da função f em torno de x = a ∈ D. Se existir
r > 0 tal que para cada x ∈]a − r, a + r[⊆ D se tem
lim Rn (x) = 0,
n→+∞
então a função f é analítica em x = a.
César Silva (UBI)
Cálculo II
2009/2010
142 / 460
§1.3 Série de potências e série de Taylor
Exemplos
a) A função exponencial, f (x) = ex , é de classe C ∞ e
f (n) (x) = ex o que implica f (n) (0) = 1
para qualquer n ∈ N. A fórmula de Maclaurin com resto de Lagrange será
xn
ec xn+1
x2
+ ··· +
+ Rn (x),
com Rn (x) =
2!
n!
(n + 1)!
e onde c é um número entre 0 e x. Como
c n+1 emax{0,x} |x|n+1
e x
,
(n + 1)! ≤
(n + 1)!
temos
ec xn+1
=0
lim Rn (x) = lim
n→+∞
n→+∞ (n + 1)!
e, por conseguinte, a função exponencial é analítica em torno da origem e
ex = 1 + x +
ex = 1 + x +
César Silva (UBI)
+∞ n
X
x
x2
xn
+ ···+
+ ··· =
.
2!
n!
n!
n=0
Cálculo II
2009/2010
143 / 460
§1.3 Série de potências e série de Taylor
Exemplos (continuação)
b) A função seno, f (x) = sen x, é de classe C ∞ e
f (n) (x) =
cos x
− sen x
− cos x
sen x
pelo que
f
César Silva (UBI)
(n)
(0) =
(
0
(−1)k+1
se
se
se
se
n = 4k − 3, k ∈ N;
n = 4k − 2, k ∈ N;
n = 4k − 1, k ∈ N;
n = 4k, k ∈ N;
se n = 2k, n ∈ N;
se n = 2k − 1, n ∈ N.
Cálculo II
2009/2010
144 / 460
§1.3 Série de potências e série de Taylor
Exemplos (continuação)
b) (continuação) Assim, a fórmula de Maclaurin, com resto de
Lagrange, da função seno é
sen x = x −
x3 x5
x2n+1
+
+ · · · + (−1)n
+ R2n+1 (x),
3!
5!
(2n + 1)!
com
R2n+1 (x) =
(−1)n sen c x2n+2
(2n + 2)!
e c um número entre 0 e x. Como lim R2n+1 (x) = 0, a função
n→+∞
seno é analítica em torno da origem e
sen x = x −
+∞
X
x3
x2n+1
x5
x2n+1
(−1)n
+
+ · · · + (−1)n
+ ··· =
.
3!
5!
(2n + 1)!
(2n + 1)!
n=0
César Silva (UBI)
Cálculo II
2009/2010
145 / 460
§1.3 Série de potências e série de Taylor
Exemplos (continuação)
c) De modo semelhante prova-se que a função coseno é analítica na
origem e que
cos x = 1 −
=
+∞
X
n=0
César Silva (UBI)
x2n
x2 x4
+
+ · · · + (−1)n
+ ···
2!
4!
(2n)!
(−1)n
x2n
.
(2n)!
Cálculo II
2009/2010
146 / 460
§1.3 Série de potências e série de Taylor
Façamos uma lista das principais séries de Taylor deduzidas nestes capítulo.
ex =
+∞ n
X
x
,
n!
n=0
sen x =
cos x =
+∞
X
x∈R
(−1)n
n=0
+∞
X
(−1)n
n=0
+∞
X
1
=
xn ,
1 − x n=0
ln(1 + x) =
arc tg x =
+∞
X
x2n
,
(2n)!
x∈R
x∈R
x ∈ ] − 1, 1[
(−1)n
n=0
+∞
X
(−1)n
n=0
César Silva (UBI)
x2n+1
,
(2n + 1)!
xn+1
,
n+1
x2n+1
,
2n + 1
Cálculo II
x ∈ ] − 1, 1[
x ∈ ] − 1, 1[
2009/2010
147 / 460
§1.3 Série de potências e série de Taylor
Observação
Nem todas as funções de classe C ∞ num dado intervalo aberto são
analíticas nesse intervalo. Por exemplo, se f : R → R é a função
definida por
(
2
se x 6= 0
e−1/x
f (x) =
0
se x = 0
pode-se provar que f é de classe C ∞ e f (n) (0) = 0. Obviamente, a sua
série de MacLaurin
+∞
X
f 0 (0)
f 00 (0) 2
f (n) (0) n
f (n) (0) n
x = f (0) +
x+
x + ··· +
x + ···
n!
1!
2!
n!
n=0
é identicamente nula e, portanto, é diferente de f em qualquer
intervalo da forma ] − r, r[, r > 0. Logo f não é analítica em x = 0.
César Silva (UBI)
Cálculo II
2009/2010
148 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
Breves noções de topologia em Rn
Funções de Rn em Rm
Limites
Continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
149 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
Breves noções de topologia em Rn
Os espaços Rn
Distâncias e normas
Bolas e conjuntos limitados
Interior, exterior, fronteira, aderência e derivado de um conjunto
Conjuntos abertos e conjuntos fechados
Funções de Rn em Rm
Limites
Continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
150 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
Breves noções de topologia em Rn
Os espaços Rn
Distâncias e normas
Bolas e conjuntos limitados
Interior, exterior, fronteira, aderência e derivado de um conjunto
Conjuntos abertos e conjuntos fechados
Funções de Rn em Rm
Limites
Continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
151 / 460
§2.1.1 Os espaços Rn
Recordemos que se identifica o conjunto R dos números reais com a
recta
0
César Silva (UBI)
a
Cálculo II
2009/2010
152 / 460
§2.1.1 Os espaços Rn
Os elementos do conjunto
R2 = {(x1 , x2 ) : x1 , x2 ∈ R}
podem ser representados no plano da seguinte forma
x2
b
b
a
P (a, b)
x1
Representação geométrica de um ponto de R2
César Silva (UBI)
Cálculo II
2009/2010
153 / 460
§2.1.1 Os espaços Rn
Os elementos do conjunto
R3 = {(x1 , x2 , x3 ) : x1 , x2 , x3 ∈ R}
podem ser representados no espaço da seguinte forma
x3
c
b
P (a, b, c)
b
x2
a
x1
Representação geométrica de um ponto de R3
César Silva (UBI)
Cálculo II
2009/2010
154 / 460
§2.1.1 Os espaços Rn
Podemos generalizar este género de conjuntos para qualquer número
natural n. Assim, definimos o conjunto Rn utilizando o produto
cartesiano, ou seja,
Rn = |R × R ×
· · · × R}
{z
n vezes
é o conjunto formado por todos os elementos da forma
x = (x1 , . . . , xn )
onde xi é um número real para i = 1, . . . , n. A cada elemento xi
chamamos i-ésima coordenada de x.
César Silva (UBI)
Cálculo II
2009/2010
155 / 460
§2.1.1 Os espaços Rn
Em Rn vamos considerar duas operações, a adição (entre elementos de
Rn ) e a multiplicação de um número real por um elemento de Rn ,
definidas, para cada
x = (x1 , . . . , xn ) e y = (y1 , . . . , yn )
em Rn e para cada λ ∈ R, da seguinte forma:
x + y = (x1 , . . . , xn ) + (y1 , . . . , yn ) = (x1 + y1 , . . . , xn + yn )
e
λx = λ (x1 , . . . , xn ) = (λx1 , . . . , λxn ) .
César Silva (UBI)
Cálculo II
2009/2010
156 / 460
§2.1.1 Os espaços Rn
A adição e a multiplicação verificam, para cada
x = (x1 , . . . , xn ) ,
y = (y1 , . . . , yn )
e
z = (z1 , . . . , zn )
em Rn e para cada λ, µ em R, as seguintes propriedades:
a) x + y = y + x;
b) x + (y + z) = (x + y) + z;
c) (0, . . . , 0) ∈ Rn é o elemento neutro da adição;
d) −x = (−x1 , . . . , −xn ) é o simétrico de x = (x1 , . . . , xn ), já que
x + (−x) = (0, . . . , 0);
e) λ (µx) = (λµ) x;
f ) λ (x + y) = λx + λy;
g) (λ + µ) x = λx + µx;
h) 1 x = x.
Por se verificarem estas propriedades, é costume dizer que Rn é um
espaço vectorial.
César Silva (UBI)
Cálculo II
2009/2010
157 / 460
§2.1.1 Os espaços Rn
Associada a estas operações está uma outra operação, a subtracção,
que é definida, para cada
x = (x1 , . . . , xn ) e y = (y1 , . . . , yn )
em Rn , por
x − y = (x1 , . . . , xn ) − (y1 , . . . , yn ) = (x1 − y1 , . . . , xn − yn ).
Sempre que não haja perigo de confusão, representaremos um elemento
genérico de R2 por (x, y) em vez de (x1 , x2 ). Da mesma forma, um
elemento genérico de R3 será por vezes representado por (x, y, z) em
vez de (x1 , x2 , x3 ).
César Silva (UBI)
Cálculo II
2009/2010
158 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
Breves noções de topologia em Rn
Os espaços Rn
Distâncias e normas
Bolas e conjuntos limitados
Interior, exterior, fronteira, aderência e derivado de um conjunto
Conjuntos abertos e conjuntos fechados
Funções de Rn em Rm
Limites
Continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
159 / 460
§2.1.2 Distâncias e normas
Em R, observando a figura que se segue
|x − y|
x
y
Distância entre dois números reais x e y
verificamos que a distância entre dois números reais x e y é dada por
d(x, y) = |x − y| .
César Silva (UBI)
Cálculo II
2009/2010
160 / 460
§2.1.2 Distâncias e normas
Vejamos como calcular a distância entre dois elementos de R2 . Para
isso consideremos dois pontos x = (x1 , x2 ) e y = (y1 , y2 ) e façamos a
sua representação geométrica.
x2
b
d(
y2
b
x,
y)
x 2 − y2
x 1 − y1
x1
y1
Distância entre dois pontos de R2
Pelo teorema de Pitágoras concluímos que a distância entre x e y é
dada por
q
d(x, y) = (x1 − y1 )2 + (x2 − y2 )2 .
César Silva (UBI)
Cálculo II
2009/2010
161 / 460
§2.1.2 Distâncias e normas
Do mesmo modo, a distância entre dois pontos x = (x1 , x2 , x3 ) e
y = (y1 , y2 , y3 ) é dada por
d(x, y) =
q
(x1 − y1 )2 + (x2 − y2 )2 + (x3 − y3 )2 .
b
x = (x1 , x2 , x3 )
b
y = (y1 , y2 , y3 )
Distância entre dois pontos de R3
César Silva (UBI)
Cálculo II
2009/2010
162 / 460
§2.1.2 Distâncias e normas
De um modo geral, dados x = (x1 , . . . , xn ) e y = (y1 , . . . , yn ) em Rn , a
distância entre x e y calcula-se usando a seguinte fórmula:
d(x, y) =
César Silva (UBI)
q
(x1 − y1 )2 + (x2 − y2 )2 + · · · + (xn − yn )2 .
Cálculo II
2009/2010
163 / 460
§2.1.2 Distâncias e normas
Associado à definição de distância temos o conceito de norma. Dado
x = (x1 , . . . , xn ) ∈ Rn , a norma de x é dada por
q
kxk = x21 + x22 + · · · + x2n .
Repare-se que se representarmos por 0 o vector nulo (0, . . . , 0) temos
kxk = kx − 0k = d(x, 0)
pelo que a norma de x = (x1 , . . . , xn ) é apenas o comprimento do vector x, tal
como ilustra a figura seguinte no caso particular de R2 :
x = (x1 , x2 )
x2
x1
Além disso, dados x = (x1 , . . . , xn ) e y = (y1 , . . . , yn ) em Rn , temos
d(x, y) = kx − yk.
César Silva (UBI)
Cálculo II
2009/2010
164 / 460
§2.1.2 Distâncias e normas
Para quaisquer x, y ∈ Rn e para qualquer λ ∈ R, as seguintes
propriedades são verdadeiras:
a) kxk ≥ 0
b) kxk = 0 se e só se x = 0;
c) kλxk = |λ| kxk;
d) kx + yk ≤ kxk + kyk.
(desigualdade triangular)
As três primeiras propriedades apresentadas anteriormente são fáceis
de verificar. Já a última propriedade é mais difícil de provar.
César Silva (UBI)
Cálculo II
2009/2010
165 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
Breves noções de topologia em Rn
Os espaços Rn
Distâncias e normas
Bolas e conjuntos limitados
Interior, exterior, fronteira, aderência e derivado de um conjunto
Conjuntos abertos e conjuntos fechados
Funções de Rn em Rm
Limites
Continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
166 / 460
§2.1.3 Bolas e conjuntos limitados
Seja a = (a1 , . . . , an ) um ponto de Rn . Chama-se bola aberta de
centro a e raio r > 0 ao conjunto
Br (a) = {x ∈ Rn : d(x, a) < r}
= {x ∈ Rn : kx − ak < r}
=
n
n
x∈R :
q
(x1 − a1
)2
+ (x2 − a2
)2
+ · · · + (xn − an
)2
<r
= x ∈ Rn : (x1 − a1 )2 + (x2 − a2 )2 + · · · + (xn − an )2 < r 2
e bola fechada de centro a e raio r ≥ 0 ao conjunto
o
Br [a] = {x ∈ Rn : d(x, a) ≤ r}
= {x ∈ Rn : kx − ak ≤ r}
=
n
n
x∈R :
q
(x1 − a1
)2
+ (x2 − a2
)2
+ · · · + (xn − an
)2
≤r
o
= x ∈ Rn : (x1 − a1 )2 + (x2 − a2 )2 + · · · + (xn − an )2 ≤ r 2 .
César Silva (UBI)
Cálculo II
2009/2010
167 / 460
§2.1.3 Bolas e conjuntos limitados
O conjunto
Sr (a) = {x ∈ Rn : d(x, a) = r}
= {x ∈ Rn : kx − ak = r}
=
n
x ∈ Rn :
q
(x1 − a1 )2 + (x2 − a2 )2 + · · · + (xn − an )2 = r
= x ∈ Rn : (x1 − a1 )2 + (x2 − a2 )2 + · · · + (xn − an )2 = r 2
designa-se por esfera de centro a e raio r ≥ 0.
César Silva (UBI)
Cálculo II
2009/2010
o
168 / 460
§2.1.3 Bolas e conjuntos limitados
Em R a distância entre dois elementos é dada pelo módulo da diferença
e, por conseguinte, as bolas são intervalos e as esferas conjuntos com
dois pontos:
a−r
a
a+r
a−r
a
a+r
a−r
a
a+r
Bola aberta, bola fechada e esfera de centro a ∈ R e raio r
César Silva (UBI)
Cálculo II
2009/2010
169 / 460
§2.1.3 Bolas e conjuntos limitados
A figura seguinte ilustra, em R2 , os três conjuntos definidos
anteriormente:
r
a2
b
a1
r
a2
b
r
a2
b
a1
a1
Bola aberta, bola fechada e esfera de centro (a1 , a2 ) e raio r
César Silva (UBI)
Cálculo II
2009/2010
170 / 460
§2.1.3 Bolas e conjuntos limitados
Em R3 a bola de centro a = (a1 , a2 , a3 ) e raio r pode ser representada
por
ab
r
Representação geométrica em R3 da bola de centro a = (a1 , a2 , a3 ) e raio r
César Silva (UBI)
Cálculo II
2009/2010
171 / 460
§2.1.3 Bolas e conjuntos limitados
Um subconjunto A de Rn diz-se limitado se estiver contido em
alguma bola centrada na origem, isto é,
A ⊆ Br [0] para algum r > 0,
ou seja, se existir r > 0 tal que
kxk ≤ r para cada x ∈ A.
Os subconjuntos de Rn que não são limitados dizem-se ilimitados
César Silva (UBI)
Cálculo II
2009/2010
172 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
Breves noções de topologia em Rn
Os espaços Rn
Distâncias e normas
Bolas e conjuntos limitados
Interior, exterior, fronteira, aderência e derivado de um conjunto
Conjuntos abertos e conjuntos fechados
Funções de Rn em Rm
Limites
Continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
173 / 460
§2.1.4 Interior, exterior, fronteira, aderência e derivado de um conjunto
Seja A um subconjunto não vazio de Rn . Um ponto a ∈ Rn diz-se
interior a A
se existir ε > 0 tal que Bε (a) ⊆ A.
O ponto a diz-se exterior a A
se existir ε > 0 tal que Bε (a) ⊆ Rn \ A.
Um ponto a ∈ Rn diz-se fronteiro a A
se para cada ε > 0, Bε (a) ∩ A 6= ∅ e Bε (a) ∩ (Rn \ A) 6= ∅.
César Silva (UBI)
Cálculo II
2009/2010
174 / 460
§2.1.4 Interior, exterior, fronteira, aderência e derivado de um conjunto
A figura que se segue ilustra estes três conceitos.
a
c
b
Pontos interiores, pontos exteriores e pontos fronteiros
O ponto a é um ponto interior ao conjunto, o ponto b é um ponto
exterior ao conjunto e o ponto c é um ponto fronteiro ao conjunto.
César Silva (UBI)
Cálculo II
2009/2010
175 / 460
§2.1.4 Interior, exterior, fronteira, aderência e derivado de um conjunto
O conjunto dos pontos interiores a A designa-se por interior de A e
representa-se por int A ou A◦ .
O conjunto dos pontos exteriores a A chama-se exterior de A e
representa-se por ext A.
O conjunto dos pontos fronteiros de A diz-se a fronteira de A e
representa-se por fr A.
César Silva (UBI)
Cálculo II
2009/2010
176 / 460
§2.1.4 Interior, exterior, fronteira, aderência e derivado de um conjunto
Observações
a) Da definição resulta imediatamente que int A, ext A e fr A são
conjuntos disjuntos dois a dois e que
Rn = int A ∪ ext A ∪ fr A.
b) Outra consequência imediata da definição é a seguinte
int A = ext (Rn \ A)
César Silva (UBI)
e
Cálculo II
fr A = fr (Rn \ A) .
2009/2010
177 / 460
§2.1.4 Interior, exterior, fronteira, aderência e derivado de um conjunto
Exemplos
a) Consideremos os conjuntos
A = (x, y) ∈ R2 : 1 < x < 2 ∧ 1 < y < 2
B = (x, y) ∈ R2 : 3 ≤ x ≤ 4 ∧ 1 ≤ y ≤ 2
C = (x, y) ∈ R2 : 5 ≤ x ≤ 6 ∧ 1 < y < 2
Estes conjuntos estão representados na figura seguinte
y
2
A
B
C
1
1
César Silva (UBI)
2
3
Cálculo II
4
5
6
x
2009/2010
178 / 460
§2.1.4 Interior, exterior, fronteira, aderência e derivado de um conjunto
Exemplos
a) (continuação) Então o interior destes três conjuntos é dado por
int A =
int B =
int C =
o exterior é dado por
ext A =
ext B =
ext C =
(x, y) ∈ R2 : 1 < x < 2 ∧ 1 < y < 2
(x, y) ∈ R2 : 3 < x < 4 ∧ 1 < y < 2
(x, y) ∈ R2 : 5 < x < 6 ∧ 1 < y < 2 ,
(x, y) ∈ R2 : x < 1 ∨ x > 2 ∨ y < 1 ∨ y > 2
(x, y) ∈ R2 : x < 3 ∨ x > 4 ∨ y < 1 ∨ y > 2
(x, y) ∈ R2 : x < 5 ∨ x > 6 ∨ y < 1 ∨ y > 2 ,
e a fronteira é dada por
fr A =
fr B =
fr C =
(x, y) ∈ R2 : ((y = 1 ∨ y = 2) ∧ 1 ≤ x ≤ 2) ∨ ((x = 1 ∨ x = 2) ∧ 1 ≤ y ≤ 2)
(x, y) ∈ R2 : ((y = 1 ∨ y = 2) ∧ 3 ≤ x ≤ 4) ∨ ((x = 3 ∨ x = 4) ∧ 1 ≤ y ≤ 2)
(x, y) ∈ R2 : ((y = 1 ∨ y = 2) ∧ 5 ≤ x ≤ 6) ∨ ((x = 5 ∨ x = 6) ∧ 1 ≤ y ≤ 2) .
César Silva (UBI)
Cálculo II
2009/2010
179 / 460
§2.1.4 Interior, exterior, fronteira, aderência e derivado de um conjunto
Exemplos
b) Dada a bola aberta Br (a) de centro a e raio r > 0 tem-se
int (Br (a)) = Br (a)
ext (Br (a)) = Rn \ Br [a]
fr (Br (a)) = Sr (a).
O interior, o exterior e a fronteira da bola fechada Br [a] de centro a
e raio r > 0 coincidem, respectivamente, com o interior, o exterior e
a fronteira de Br (a).
c) É óbvio que int Rn = Rn , ext Rn = ∅ e fr Rn = ∅.
d) Também temos int ∅ = ∅, ext ∅ = Rn e fr ∅ = ∅.
César Silva (UBI)
Cálculo II
2009/2010
180 / 460
§2.1.4 Interior, exterior, fronteira, aderência e derivado de um conjunto
Um ponto a ∈ Rn diz-se aderente a um subconjunto A ⊆ Rn
se para cada ε > 0, Bε (a) ∩ A 6= ∅.
O conjunto dos pontos aderentes de um conjunto A designa-se por
aderência ou fecho de A e representa-se por A.
César Silva (UBI)
Cálculo II
2009/2010
181 / 460
§2.1.4 Interior, exterior, fronteira, aderência e derivado de um conjunto
Exemplos
a) Considerando novamente os conjuntos
n
o
n
o
A = (x, y) ∈ R2 : 1 < x < 2 ∧ 1 < y < 2
n
o
B = (x, y) ∈ R2 : 3 ≤ x ≤ 4 ∧ 1 ≤ y ≤ 2
C = (x, y) ∈ R2 : 5 ≤ x ≤ 6 ∧ 1 < y < 2
temos
A=
B =
C =
César Silva (UBI)
n
o
(x, y) ∈ R2 : 1 ≤ x ≤ 2 ∧ 1 ≤ y ≤ 2
n
o
(x, y) ∈ R2 : 3 ≤ x ≤ 4 ∧ 1 ≤ y ≤ 2
n
o
(x, y) ∈ R2 : 5 ≤ x ≤ 6 ∧ 1 ≤ y ≤ 2
Cálculo II
2009/2010
182 / 460
§2.1.4 Interior, exterior, fronteira, aderência e derivado de um conjunto
Exemplos (continuação)
b) Seja Br (a) a bola aberta de centro a e raio r > 0. Então
Br (a) = Br [a].
c) Também se tem Rn = Rn e ∅ = ∅.
César Silva (UBI)
Cálculo II
2009/2010
183 / 460
§2.1.4 Interior, exterior, fronteira, aderência e derivado de um conjunto
É evidente que para qualquer subconjunto A de Rn se tem
A = int A ∪ fr A
e
int A ⊆ A ⊆ A.
César Silva (UBI)
Cálculo II
2009/2010
184 / 460
§2.1.4 Interior, exterior, fronteira, aderência e derivado de um conjunto
Sejam A um subconjunto de Rn e a ∈ Rn . Diz-se que a é um ponto
de acumulação de A
se para cada ε > 0, Bε (a) ∩ (A \ {a}) 6= ∅.
O conjunto dos pontos de acumulação de um conjunto A representa-se
por A0 e designa-se por derivado.
Os pontos de A que não são pontos de acumulação de A designam-se
por pontos isolados.
César Silva (UBI)
Cálculo II
2009/2010
185 / 460
§2.1.4 Interior, exterior, fronteira, aderência e derivado de um conjunto
Exemplos
a) Seja
n
o
A = (x, y) ∈ R2 : x2 + y 2 < 1 ∪ {(2, 2) , (−2, 2)} .
O conjunto A tem a seguinte representação geométrica
y
2
1
-2
César Silva (UBI)
Cálculo II
2
x
2009/2010
186 / 460
§2.1.4 Interior, exterior, fronteira, aderência e derivado de um conjunto
Exemplos (continuação)
a) (continuação) Então se
A = (x, y) ∈ R2 : x2 + y 2 < 1 ∪ {(2, 2) , (−2, 2)}
tem-se
(x, y) ∈ R2 : x2 + y 2 < 1 ,
ext A = (x, y) ∈ R2 : x2 + y 2 > 1 \ {(2, 2) , (−2, 2)} ,
fr A = (x, y) ∈ R2 : x2 + y 2 = 1 ∪ {(2, 2) , (−2, 2)} ,
A = (x, y) ∈ R2 : x2 + y 2 ≤ 1 ∪ {(2, 2) , (−2, 2)} ,
A0 = (x, y) ∈ R2 : x2 + y 2 ≤ 1 .
int A =
Os pontos (2, 2) e (−2, 2) são pontos isolados de A. Além disso o conjunto
A é limitado porque
A ⊆ B3 [0].
b) É óbvio que (Rn )0 = Rn e que (∅)0 = ∅.
César Silva (UBI)
Cálculo II
2009/2010
187 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
Breves noções de topologia em Rn
Os espaços Rn
Distâncias e normas
Bolas e conjuntos limitados
Interior, exterior, fronteira, aderência e derivado de um conjunto
Conjuntos abertos e conjuntos fechados
Funções de Rn em Rm
Limites
Continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
188 / 460
§2.1.5 Conjuntos abertos e conjuntos fechados
Um subconjunto A de Rn diz-se aberto se A = int A e diz-se fechado
se A = A.
b
a
conjunto aberto
conjunto fechado
Conjuntos abertos e conjuntos fechados
César Silva (UBI)
Cálculo II
2009/2010
189 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
Breves noções de topologia em Rn
Funções de Rn em Rm
Definição e exemplos
Gráfico, curvas de nível e superfícies de nível
Limites
Continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
190 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
Breves noções de topologia em Rn
Funções de Rn em Rm
Definição e exemplos
Gráfico, curvas de nível e superfícies de nível
Limites
Continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
191 / 460
§2.2.1 Definição e exemplos
Seja D um subconjunto não vazio de Rn . Uma função
f : D ⊆ Rn → Rm
associa a cada elemento x = (x1 , . . . , xn ) de D um e um só elemento de
Rm que representaremos por f (x). Como f (x) ∈ Rm , tem-se
f (x) = (f1 (x), f2 (x), . . . , fm (x))
onde
f1 : D ⊆ Rn → R
f2 : D ⊆ Rn → R
..
.
fm : D ⊆ Rn → R.
César Silva (UBI)
Cálculo II
2009/2010
192 / 460
§2.2.1 Definição e exemplos
Assim, cada função f : D ⊆ Rn → Rm pode ser definida por m funções
f1 : D ⊆ Rn → R
f2 : D ⊆ Rn → R
..
.
fm : D ⊆ Rn → R,
funções essas que se designam por funções coordenadas de f . Nestas
condições escreve-se
f = (f1 , f2 , . . . , fm ) .
César Silva (UBI)
Cálculo II
2009/2010
193 / 460
§2.2.1 Definição e exemplos
As funções
f : D ⊆ Rn → R
designam-se por funções escalares e as funções
f : D ⊆ Rn → Rm , m > 1,
designam-se por funções vectoriais.
O conjunto D no qual está definida a função designa-se por domínio
de f e o conjunto de todas as imagens de uma função designa-se por
contradomínio de f , ou seja, o contradomínio de uma função
f : D ⊆ Rn → Rm
é o conjunto
f (D) = {f (x) ∈ Rm : x ∈ D} .
César Silva (UBI)
Cálculo II
2009/2010
194 / 460
§2.2.1 Definição e exemplos
Exemplos de funções f : D ⊆ Rn → Rm
a) Seja f a função dada por
f (x, y) = (f1 (x, y), f2 (x, y), f3 (x, y))
= (ln(y − x), sen x, 1) .
O domínio de f é o conjunto
n
o
D = (x, y) ∈ R2 : y − x > 0
n
= (x, y) ∈ R2 : y > x
o
Obviamente, f : D ⊆ R2 → R3 e o seu contradomínio é o conjunto
n
o
f (D) = (a, b, c) ∈ R3 : − 1 ≤ b ≤ 1, c = 1 .
Esta função é uma função vectorial pois o seu contradomínio é um
subconjunto de R3 .
César Silva (UBI)
Cálculo II
2009/2010
195 / 460
§2.2.1 Definição e exemplos
Exemplos de funções f : D ⊆ Rn → Rm (continuação)
a) (continuação) Façamos a representação geométrica do domínio
da função f :
n
D = (x, y) ∈ R2 : y > x
y
o
y=x
D
1
1
César Silva (UBI)
Cálculo II
x
2009/2010
196 / 460
§2.2.1 Definição e exemplos
Exemplos de funções f : D ⊆ Rn → Rm (continuação)
b) Consideremos a função escalar dada por
f (x, y) = x ln y 2 − x .
O domínio de f é o conjunto
n
o
D = (x, y) ∈ R2 : y 2 − x > 0
n
o
= (x, y) ∈ R2 : y 2 > x
Assim, f : D ⊆ R2 → R e o contradomínio de f é R.
César Silva (UBI)
Cálculo II
2009/2010
197 / 460
§2.2.1 Definição e exemplos
Exemplos de funções f : D ⊆ Rn → Rm (continuação)
b) (continuação) Façamos a representação geométrica do domínio
da função f :
n
o
D = (x, y) ∈ R2 : y 2 > x
y
D
x = y2
√
2
1
1
César Silva (UBI)
Cálculo II
2
x
2009/2010
198 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
Breves noções de topologia em Rn
Funções de Rn em Rm
Definição e exemplos
Gráfico, curvas de nível e superfícies de nível
Limites
Continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
199 / 460
§2.2.2 Gráfico, curvas de nível e superfícies de nível
Dada uma função f : D ⊆ Rn → Rm designa-se por gráfico de f o
conjunto
G (f ) = {(a, f (a)) : a ∈ D} .
César Silva (UBI)
Cálculo II
2009/2010
200 / 460
§2.2.2 Gráfico, curvas de nível e superfícies de nível
Gráfico da função dada por f (x, y) = x2 + y 2
Seja f a função dada por
f (x, y) = x2 + y 2 .
O domínio desta função é R2 e o seu contradomínio é [0, +∞[. O
gráfico desta função é o conjunto
G (f ) =
n
o
(x, y), x2 + y 2 : (x, y) ∈ R2 .
Costuma identificar-se
o ponto (x, y), x2 + y 2 de R2 × R com o ponto
2
2
3
x, y, x + y de R . Assim,
G (f ) =
César Silva (UBI)
n
o
x, y, x2 + y 2 : (x, y) ∈ R2 .
Cálculo II
2009/2010
201 / 460
§2.2.2 Gráfico, curvas de nível e superfícies de nível
Gráfico da função dada por f (x, y) = x2 + y 2 (continuação)
Façamos a representação geométrica do gráfico de f :
f (x, y)
5
b
2
1
y
x
César Silva (UBI)
Cálculo II
2009/2010
202 / 460
§2.2.2 Gráfico, curvas de nível e superfícies de nível
Sejam f : D ⊆ Rn → R uma função e k ∈ R. O conjunto
Ck = {x ∈ D : f (x) = k}
designa-se por conjunto de nível k. Em R2 os conjuntos de nível
designam-se por curvas de nível e em R3 designam-se por
superfícies de nível.
César Silva (UBI)
Cálculo II
2009/2010
203 / 460
§2.2.2 Gráfico, curvas de nível e superfícies de nível
Curvas de nível da função dada por f (x, y) = x2 + y 2
Consideremos novamente a função f : R2 → R dada por
f (x, y) = x2 + y 2 .
As curvas de nível desta função são
n
o
Ck = (x, y) ∈ R2 : x2 + y 2 = k .
Assim, se k < 0 temos Ck = ∅. Se k = 0 temos C0 = {(0, 0)}.
Finalmente, para k√> 0 a curva de nível é uma circunferência centrada
em (0, 0) e de raio k.
César Silva (UBI)
Cálculo II
2009/2010
204 / 460
§2.2.2 Gráfico, curvas de nível e superfícies de nível
Curvas de nível da função dada por f (x, y) = x2 + y 2 (continuação)
As curvas de nível 1, 2 e 3 estão representadas na figura seguinte
y
1
César Silva (UBI)
Cálculo II
√ √
2 3
x
2009/2010
205 / 460
§2.2.2 Gráfico, curvas de nível e superfícies de nível
Curvas de nível da função dada por f (x, y) = x2 + y 2 (continuação)
As curvas de nível podem ajudar a representar geometricamente o
gráfico da função:
f (x, y)
3
2
1
y
x
César Silva (UBI)
Cálculo II
2009/2010
206 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
Breves noções de topologia em Rn
Funções de Rn em Rm
Limites
Definição, propriedades e exemplos
Limites relativos e limites direccionais
Continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
207 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
Breves noções de topologia em Rn
Funções de Rn em Rm
Limites
Definição, propriedades e exemplos
Limites relativos e limites direccionais
Continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
208 / 460
§2.3.1 Definição, propriedades e exemplos
Comecemos por recordar a definição de limite para funções
ou seja, quando n = m = 1.
f : D ⊆ R → R,
Sejam D um subconjunto de R, f : D → R uma função, a um ponto de
acumulação de D e b ∈ R. Diz-se que b é o limite (de f ) quando x
tende para a, e escreve-se
lim f (x) = b,
x→a
se para cada ε > 0, existe δ > 0 tal que
|f (x) − b| < ε para qualquer x ∈ D tal que 0 < |x − a| < δ.
Simbolicamente, tem-se o seguinte
lim f (x) = b ⇔ ∀ε > 0 ∃δ > 0 ∀x ∈ D (0 < |x − a| < δ ⇒ |f (x) − b| < ε)
x→a
César Silva (UBI)
Cálculo II
2009/2010
209 / 460
§2.3.1 Definição, propriedades e exemplos
A figura seguinte ilustra o conceito de limite de funções
f : D ⊆ R → R.
y
f (a)
b
b+ε
b+ε
b
b−ε
b−ε
a+δa+δa+δ
a−δa−δa−δ
a−δaa+δ
x
Interpretação geométrica do conceito de limite de uma função real de variável real
César Silva (UBI)
Cálculo II
2009/2010
210 / 460
§2.3.1 Definição, propriedades e exemplos
Para generalizarmos o conceito de limite para funções
f : D ⊆ Rn → Rm
temos de utilizar normas em vez de módulos.
Deste modo, sejam D um subconjunto de Rn ,
f : D ⊆ Rn → Rm
uma função, a um ponto de acumulação de D e b ∈ Rm . Dizemos que b
é o limite de f quando x tende para a, e escreve-se
lim f (x) = b,
x→a
se para cada ε > 0, existe δ > 0 tal que
kf (x) − bk < ε para qualquer x ∈ D tal que 0 < kx − ak < δ.
Simbolicamente, tem-se o seguinte:
lim f (x) = b ⇔ ∀ε > 0 ∃δ > 0 ∀x ∈ D (0 < kx − ak < δ ⇒ kf (x) − bk < ε) .
x→a
César Silva (UBI)
Cálculo II
2009/2010
211 / 460
§2.3.1 Definição, propriedades e exemplos
Para interpretar geometricamente a definição de limite basta observar que
kf (x) − bk < ε é equivalente a f (x) ∈ Bε (b)
e que
0 < kx − ak < δ é equivalente a x ∈ Bδ (a) \ {a} .
Rn
f
Rm
D
f (D)
f (a)
δ a
ε b
x
f (x)
Interpretação geométrica do limite em a de uma função f : D ⊆ Rn → Rm
César Silva (UBI)
Cálculo II
2009/2010
212 / 460
§2.3.1 Definição, propriedades e exemplos
Se a for um ponto isolado do domínio D, então a definição dada atrás
não se pode aplicar porque, quando a é um ponto isolado de D, é
possível escolher δ > 0 tal que
0 < kx − ak < δ
é falso para qualquer x ∈ D.
César Silva (UBI)
Cálculo II
2009/2010
213 / 460
§2.3.1 Definição, propriedades e exemplos
Propriedades
a) O limite de de uma função (quando existe) é único.
b) Sejam D um subconjunto de Rm tal que
a = (a1 , . . . , an ) ∈ Rn
um ponto de acumulação de D e seja
b = (b1 , . . . , bm ) ∈ Rm .
Se
uma função tal que
f : D ⊆ Rn → Rm
f = (f1 , . . . , fm ) ,
então
lim f (x) = b se e só se lim fi (x) = bi , i = 1, . . . , m.
x→a
César Silva (UBI)
x→a
Cálculo II
2009/2010
214 / 460
§2.3.1 Definição, propriedades e exemplos
Propriedades (continuação)
c) Sejam D ⊆ Rn , f, g : D → Rm , α : D → R e a um ponto de acumulação
de D. Suponhamos que existem
lim f (x), lim g(x) e lim α(x).
x→a
Então
x→a
x→a
i) existe lim [f (x) + g(x)] e
x→a
lim [f (x) + g(x)] = lim f (x) + lim g(x);
x→a
x→a
x→a
ii) existe lim [α(x)f (x)] e
x→a
h
i h
i
lim [α(x)f (x)] = lim α(x) . lim f (x) ;
x→a
x→a
1
e
α(x)
iii) se lim α(x) 6= 0, existe lim
x→a
x→a
lim
x→a
César Silva (UBI)
x→a
1
1
=
.
α(x)
lim α(x)
Cálculo II
x→a
2009/2010
215 / 460
§2.3.1 Definição, propriedades e exemplos
Propriedades (continuação)
d) Sejam D um subconjunto de Rn , a um ponto de acumulação de D e
f, g : D ⊆ Rn → R.
Suponhamos que
lim f (x) = 0
x→a
e g é uma função limitada numa bola centrada em a. Então
lim [f (x).g(x)] = 0.
x→a
César Silva (UBI)
Cálculo II
2009/2010
216 / 460
§2.3.1 Definição, propriedades e exemplos
Propriedades (continuação)
e) Sejam
f : Df ⊆ Rn → Rm
e
duas funções tais que
g : Dg ⊆ Rm → Rk
f (Df ) ⊆ Dg .
Suponhamos que a ∈ Rn é um ponto de acumulação de Df e que
b ∈ Dg é um ponto de acumulação de Dg . Se
lim f (x) = b e
x→a
lim g(x) = g(b),
x→b
então
lim (g ◦ f )(x) = lim g(f (x)) = g(b).
x→a
César Silva (UBI)
x→a
Cálculo II
2009/2010
217 / 460
§2.3.1 Definição, propriedades e exemplos
Rn
Rm
Df
f Df
f
a
b
Dg
b = f (a)
b
Rk
g (Dg )
g
g(b) = g(f (a))
b
g◦f
Composição de funções
César Silva (UBI)
Cálculo II
2009/2010
218 / 460
§2.3.1 Definição, propriedades e exemplos
Exemplos
a) Seja f : R2 → R3 a função definida por
f (x, y) = (x + y, sen(x + 2y), cos x) .
Então
f = (f1 , f2 , f3 )
onde
f1 , f2 , f3 : R2 → R
são as funções definidas por
f1 (x, y) = x + y,
César Silva (UBI)
f2 (x, y) = sen(x + 2y)
Cálculo II
e f3 (x, y) = cos x.
2009/2010
219 / 460
§2.3.1 Definição, propriedades e exemplos
Exemplos (continuação)
a) (continuação) Como
lim
f1 (x, y) =
lim
f2 (x, y) =
(x,y)→(π/2,0)
(x,y)→(π/2,0)
lim
x + y = π/2 + 0 = π/2
lim
sen(x + 2y)
(x,y)→(π/2,0)
(x,y)→(π/2,0)
= sen(π/2 + 2.0) = sen(π/2) = 1
lim
(x,y)→(π/2,0)
f3 (x, y) =
lim
(x,y)→(π/2,0)
cos x = cos(π/2) = 0,
temos
lim
(x,y)→(π/2,0)
=
f (x, y)
lim
(x,y)→(π/2,0)
f1 (x, y),
lim
(x,y)→(π/2,0)
= (π/2, 1, 0) .
César Silva (UBI)
Cálculo II
f2 (x, y),
lim
(x,y)→(π/2,0)
f3 (x, y)
2009/2010
220 / 460
§2.3.1 Definição, propriedades e exemplos
Exemplos (continuação)
b) Seja f : R2 → R a função dada por
xy 2
f (x, y) = x2 + y 2
0
se (x, y) 6= (0, 0),
se (x, y) = (0, 0).
Esta função pode ser escrita, quando (x, y) 6= (0, 0), da seguinte
forma
y2
.
x 2
x + y2
César Silva (UBI)
Cálculo II
2009/2010
221 / 460
§2.3.1 Definição, propriedades e exemplos
Exemplos (continuação)
b) (continuação) Como
0≤
x2
lim
(x,y)→(0,0)
x=0e
y2
é limitada, pois
x2 + y 2
y2
≤ 1 para cada (x, y) ∈ R2 \ {(0, 0)} ,
+ y2
podemos concluir que
xy 2
= 0.
(x,y)→(0,0) x2 + y 2
lim
e, consequentemente,
lim
(x,y)→(0,0)
César Silva (UBI)
f (x, y) = 0.
Cálculo II
2009/2010
222 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
Breves noções de topologia em Rn
Funções de Rn em Rm
Limites
Definição, propriedades e exemplos
Limites relativos e limites direccionais
Continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
223 / 460
§2.3.2 Limites relativos e limites direccionais
Seja A um subconjunto de D ⊆ Rn e a um ponto de acumulação de A.
Chama-se limite relativo a A da função
f : D ⊆ Rn → Rm
no ponto a (ou limite quando x tende para a no conjunto A) ao
limite em a (quando exista) da restrição de f a A e usa-se a notação
lim f (x).
x→a
x∈A
César Silva (UBI)
Cálculo II
2009/2010
224 / 460
§2.3.2 Limites relativos e limites direccionais
É evidente para qualquer função
f : D ⊆ Rn → R
se existe
lim f (x),
x→a
então também existe
lim f (x)
x→a
x∈A
para qualquer subconjunto A de D tal que a é ponto de acumulação de
Ae
lim f (x) = lim f (x).
x→a
x∈A
x→a
Assim, se existirem dois limites relativos distintos, o limite não existe.
César Silva (UBI)
Cálculo II
2009/2010
225 / 460
§2.3.2 Limites relativos e limites direccionais
Além disso, dada uma função
f : D ⊆ Rn → R,
se A1 e A2 são dois subconjuntos de Rn tais que a é ponto de
acumulação de A1 e de A2 ,
D = A1 ∪ A2
e existem e são iguais os limites
lim f (x)
x→a
x∈A1
e
lim f (x),
x→a
x∈A2
então também existe
lim f (x)
x→a
e
lim f (x) = lim f (x) = lim f (x).
x→a
César Silva (UBI)
x→a
x∈A1
Cálculo II
x→a
x∈A2
2009/2010
226 / 460
§2.3.2 Limites relativos e limites direccionais
Exemplo
Seja f : R2 \ {(0, 0)} → R a função definida por
f (x, y) =
x2 − y 2
.
x2 + y 2
Considerando os conjuntos
A = {(x, 0) : x ∈ R \ {0}} e B = {(0, y) : y ∈ R \ {0}}
temos
lim
(x,y)→(0,0)
(x,y)∈A
x2
= lim 1 = 1
x→0 x2
x→0
f (x, y) = lim f (x, 0) = lim
x→0
e
lim
(x,y)→(0,0)
(x,y)∈B
−y 2
= lim −1 = −1.
y→0 y 2
y→0
f (x, y) = lim f (0, y) = lim
César Silva (UBI)
y→0
Cálculo II
2009/2010
227 / 460
§2.3.2 Limites relativos e limites direccionais
Exemplo (continuação)
Como
lim
(x,y)→(0,0)
(x,y)∈A
f (x, y) 6=
lim
(x,y)→(0,0)
(x,y)∈B
f (x, y),
não existe
lim
(x,y)→(0,0)
César Silva (UBI)
f (x, y).
Cálculo II
2009/2010
228 / 460
§2.3.2 Limites relativos e limites direccionais
Para funções reais de variável real, f : D ⊆ R → R, considerando os
conjuntos
Da+ = {x ∈ D : x > a} = D ∩ ]a, +∞[
e
Da− = {x ∈ D : x < a} = D ∩ ] − ∞, a[,
obtemos os limites laterais à direita e à esquerda da seguinte
forma
lim+ f (x) = lim f (x)
x→a
x→a
x∈Da+
e
lim f (x) = lim f (x),
x→a−
x→a
x∈Da−
desde que a seja ponto de acumulação de Da+ e de Da− , respectivamente.
César Silva (UBI)
Cálculo II
2009/2010
229 / 460
§2.3.2 Limites relativos e limites direccionais
A generalização natural dos limites laterais a funções
f : D ⊆ Rn → Rm
é dada pelos limites direccionais. Se a e v são elementos de Rn , com v 6= 0,
então
x ∈ Rn : x = a + tv, t ∈ R+
é a semi-recta de origem a e com a direcção e o sentido de v. Dada uma função
fazendo
f : D ⊆ Rn → Rm ,
A = x ∈ D : x = a + tv, t ∈ R+ ,
e supondo que a é ponto de acumulação de A, chama-se a
lim f (x)
x→a
x∈A
limite (direccional) de f no ponto a segundo v. Este limite obtém-se
calculando
lim+ f (a + tv).
t→0
César Silva (UBI)
Cálculo II
2009/2010
230 / 460
§2.3.2 Limites relativos e limites direccionais
Observações
a) Sejam D um subconjunto de Rn ,
f : D ⊆ Rn → R
uma função e a, v ∈ Rn . Se existe
lim f (a + tv),
t→0+
então, fazendo u = λv, λ ∈ R+ , também existe
lim f (a + tu)
t→0+
e
lim f (a + tv) = lim+ f (a + tu).
t→0+
t→0
b) Tendo em conta a observação anterior, para calcular os limites
direccionais basta considerar vectores de norma um. Assim, para funções
f : D ⊆ R2 → R,
basta considerar vectores
v = (cos α, sen α) , α ∈ [0, 2π[.
César Silva (UBI)
Cálculo II
2009/2010
231 / 460
§2.3.2 Limites relativos e limites direccionais
Exemplo
Consideremos novamente a função f : R2 \ {(0, 0)} → R definida por
f (x, y) =
Fazendo
x2 − y 2
.
x2 + y 2
v = (cos α, sen α) ,
com α ∈ [0, 2π[, temos
t2 cos2 α − t2 sen2 α
t→0+ t2 cos2 α + t2 sen2 α
= cos2 α − sen2 α
lim f (0 + t cos α, 0 + t sen α) = lim
t→0+
e, como os limites direccionais dependem do vector v, podemos concluir
que não existe
lim
(x,y)→(0,0)
César Silva (UBI)
f (x, y).
Cálculo II
2009/2010
232 / 460
§2.3.2 Limites relativos e limites direccionais
Para funções f : D ⊆ R → R é fácil provar que se existem
lim f (x)
e
x→a+
lim f (x)
x→a−
e
lim f (x) = lim f (x),
x→a+
x→a−
então também existe
lim f (x)
x→a
e
lim f (x) = lim f (x) = lim f (x).
x→a
x→a+
x→a−
No entanto, para funções
f : D ⊆ Rn → Rm , n > 1,
é possível existirem e serem iguais todos os limites direccionais, sem que
o limite da função exista. Vejamos um exemplo em que isso acontece.
César Silva (UBI)
Cálculo II
2009/2010
233 / 460
§2.3.2 Limites relativos e limites direccionais
Exemplo
No ponto (0, 0) todos os limites direccionais da função
f : R2 \ {(0, 0)} → R
definida por
f (x, y) =
x2 y
x4 + y 2
são iguais a zero. De facto, fazendo
v = (cos α, sen α) ,
com α ∈ [0, 2π[, temos, para α ∈]0, π[∪]π, 2π[,
t3 cos2 α sen α
t→0+
t→0+ t4 cos4 α + t2 sen2 α
0
t cos2 α sen α
=
= 0.
= lim 2
0 + sen2 α
t→0+ t cos4 α + sen2 α
lim f ((0, 0) + tv) = lim f (t cos α, t sen α) = lim
t→0+
César Silva (UBI)
Cálculo II
2009/2010
234 / 460
§2.3.2 Limites relativos e limites direccionais
Exemplo (continuação)
Se α = 0 vem
lim f (t, 0) = lim
t→0+
t→0+
t2 0
= lim 0 = 0.
t4 + 02 t→0+
e se α = π temos
lim f (−t, 0) = lim
t→0+
t→0+
(−t)2 0
= lim 0 = 0.
(−t)4 + 02 t→0+
Assim, todos os limites direccionais são iguais a zero.
César Silva (UBI)
Cálculo II
2009/2010
235 / 460
§2.3.2 Limites relativos e limites direccionais
Exemplo (continuação)
No entanto, considerando o conjunto
n
A = (x, y) ∈ R2 \ {(0, 0)} : y = x2
temos
lim
(x,y)→(0,0)
x∈A
o
t4
1
1
t2 .t2
=
lim
= lim =
4
2
2
4
t→0 2t
t→0 2
t→0 t + (t )
2
f (x, y) = lim f (t, t2 ) = lim
t→0
que é diferente dos limites direccionais. Logo não existe
lim
x2 y
.
+ y2
(x,y)→(0,0) x4
César Silva (UBI)
Cálculo II
2009/2010
236 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
Breves noções de topologia em Rn
Funções de Rn em Rm
Limites
Continuidade
Definição, propriedades e exemplos
Teorema de Weierstrass
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
237 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
Breves noções de topologia em Rn
Funções de Rn em Rm
Limites
Continuidade
Definição, propriedades e exemplos
Teorema de Weierstrass
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
238 / 460
§2.4.1 Definição, propriedades e exemplos
Sejam D um subconjunto de Rn ,
f : D ⊆ Rn → Rm
uma função e a ∈ D. Diz-se que f é contínua no ponto a se para
cada ε > 0, existir δ > 0 tal que
kf (x) − f (a)k < ε para qualquer x ∈ D tal que kx − ak < δ.
Simbolicamente,
f é contínua em a
⇔ ∀ε > 0 ∃δ > 0 ∀x ∈ D (kx − ak < δ ⇒ kf (x) − f (a)k < ε) .
César Silva (UBI)
Cálculo II
2009/2010
239 / 460
§2.4.1 Definição, propriedades e exemplos
Assim temos a seguinte interpretação geométrica de continuidade num
ponto.
Rn
f
Rm
D
f (D)
δ a
ε
x
f (a)
f (x)
Função de Rn em Rm contínua no ponto a
César Silva (UBI)
Cálculo II
2009/2010
240 / 460
§2.4.1 Definição, propriedades e exemplos
Dizemos que a ∈ D é um ponto de descontinuidade de
f : D ⊆ Rn → Rm
se f não é contínua em a.
Uma função
f : D ⊆ Rn → Rm
é contínua se for contínua em todos os pontos de D.
César Silva (UBI)
Cálculo II
2009/2010
241 / 460
§2.4.1 Definição, propriedades e exemplos
Observações
a) Ao contrário do que acontece na definição de limite, só faz sentido
considerar pontos do domínio D quando estamos a investigar a
continuidade de uma função.
b) Se a é um ponto isolado de D, então a função f : D → Rm é contínua em
a. De facto, dado ε > 0, basta escolher δ > 0 tal que
Assim, a condição
Bδ (a) ∩ D = {a} .
x ∈ D ∧ kx − ak < δ é equivalente a x = a
e, por conseguinte,
kf (x) − f (a)k = 0 < ε.
Em particular, se D só tem pontos isolados, então qualquer função
f : D → Rm é contínua.
c) Se a ∈ D é um ponto de acumulação de D, então f : D → Rm é contínua
em a se e só se
lim f (x) = f (a).
x→a
César Silva (UBI)
Cálculo II
2009/2010
242 / 460
§2.4.1 Definição, propriedades e exemplos
Exemplos
a) Num exemplo anterior estudamos a função
f : R2 → R3
dada por
f (x, y) = (x + y, sen(x + 2y), cos x)
e vimos que
lim
(x,y)→(π/2,0)
f (x, y) = (π/2, 1, 0) .
Como
f (π/2, 0) = (π/2, 1, 0) ,
a função é contínua no ponto (π/2, 0).
César Silva (UBI)
Cálculo II
2009/2010
243 / 460
§2.4.1 Definição, propriedades e exemplos
Exemplos (continuação)
b) Seja f : R2 → R a função é definida por
2
2
x − y
se (x, y) 6= (0, 0)
f (x, y) = x2 + y 2
0
se (x, y) = (0, 0).
Fazendo
A = (x, y) ∈ R2 : x = 0
e B = (x, y) ∈ R2 : y = 0 ,
temos
lim
(x,y)→(0,0)
x∈A
02 − y 2
−y 2
= lim 2 = lim −1 = −1
2
2
y→0 0 + y
y→0 y
y→0
f (x, y) = lim f (0, y) = lim
y→0
e
lim
(x,y)→(0,0)
x∈B
x2
x2 − 02
= lim 2 = lim 1 = 1.
2
2
x→0 x
x→0
x→0 x + 0
f (x, y) = lim f (x, 0) = lim
César Silva (UBI)
x→0
Cálculo II
2009/2010
244 / 460
§2.4.1 Definição, propriedades e exemplos
Exemplos (continuação)
b) (continuação) Como
lim
(x,y)→(0,0)
x∈A
não existe
f (x, y) 6=
lim
(x,y)→(0,0)
x∈B
f (x, y),
x2 − y 2
.
(x,y)→(0,0) x2 + y 2
lim
Logo a função não é contínua em (0, 0).
No entanto, em qualquer ponto (a, b) 6= (0, 0) esta função é contínua
porque
x2 − y 2
a2 − b2
lim
=
= f (a, b).
a2 + b2
(x,y)→(a,b) x2 + y 2
César Silva (UBI)
Cálculo II
2009/2010
245 / 460
§2.4.1 Definição, propriedades e exemplos
Propriedades
a) Sejam
uma função tal que
f : D ⊆ Rn → Rm
f = (f1 , . . . , fm )
e a um elemento de D. Então
f é contínua em a
se e só se todas as suas funções coordenadas
fi são contínuas em a.
César Silva (UBI)
Cálculo II
2009/2010
246 / 460
§2.4.1 Definição, propriedades e exemplos
Propriedades (continuação)
b) Sejam
f, g : D ⊆ Rn → Rm
duas funções contínuas em a ∈ D e
α: D → R
uma função contínua em a. Então
f + g e αf são contínuas em a
e, se α(a) 6= 0, então
1
é contínua em a.
α
César Silva (UBI)
Cálculo II
2009/2010
247 / 460
§2.4.1 Definição, propriedades e exemplos
Propriedades (continuação)
c) Sejam
e
f : Df ⊆ Rn → Rm
g : Dg ⊆ Rm → Rk
duas funções tais que f (Df ) ⊆ Dg . Se
f é contínua em a ∈ Df
e
g é contínua em f (a),
então
g ◦ f é contínua em a.
César Silva (UBI)
Cálculo II
2009/2010
248 / 460
§2.4.1 Definição, propriedades e exemplos
Exemplo
Seja f : R2 → R a função dada por
2
x y
f (x, y) = x4 + y 2
0
se (x, y) 6= (0, 0),
se (x, y) = (0, 0).
Já vimos num exemplo anterior que fazendo
A = (x, y) ∈ R2 : y = 0
e B = (x, y) ∈ R2 : y = x2 ,
temos
0
x2 0
= lim 4 = lim 0 = 0
x→0 x
x→0
x→0 x4 + 02
lim
f (x, y) =
lim
f (x, y) = lim f (x, x2 ) = lim
(x,y)→(0,0)
x∈A
(x,y)→(0,0)
e
(x,y)→(0,0)
x∈B
César Silva (UBI)
lim
x→0
f (0, y) = lim
x2 x2
x4
1
1
=
lim
= lim = .
x→0 x4 + (x2 )2
x→0 2x4
x→0 2
2
Cálculo II
2009/2010
249 / 460
§2.4.1 Definição, propriedades e exemplos
Exemplo (continuação)
Como
lim
(x,y)→(0,0)
x∈A
f (x, y) 6=
não existe
lim
lim
(x,y)→(0,0)
x∈B
f (x, y),
x2 y
+ y2
(x,y)→(0,0) x4
e, portanto, a função não é contínua em (0, 0).
No entanto, em qualquer ponto (a, b) 6= (0, 0) esta função é contínua
porque pode ser escrita como a composição de funções contínuas.
Outra forma de provarmos que f é contínua em qualquer pontos
(a, b) 6= (0, 0) é observarmos que
a2 b
x2 y
=
= f (a, b).
a4 + b2
(x,y)→(a,b) x4 + y 2
lim
César Silva (UBI)
Cálculo II
2009/2010
250 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
Breves noções de topologia em Rn
Funções de Rn em Rm
Limites
Continuidade
Definição, propriedades e exemplos
Teorema de Weierstrass
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
251 / 460
§2.4.2 Teorema de Weierstrass
Seja f : D ⊆ Rn → R uma função escalar e A um subconjunto não
vazio de D. Dizemos que f tem um máximo (absoluto) no ponto
a ∈ A ou que f (a) é um máximo (absoluto) de f em A se
f (x) ≤ f (a) para todo o x ∈ A.
Quando
f (x) ≥ f (a) para todo o x ∈ A,
dizemos que f tem um mínimo (absoluto) no ponto a ∈ A ou que
f (a) é um mínimo (absoluto) de f em A. Os máximos e mínimos
(absolutos) de f em a dizem-se extremos absolutos de f em A.
César Silva (UBI)
Cálculo II
2009/2010
252 / 460
§2.4.2 Teorema de Weierstrass
Teorema de Weierstrass
Seja
f : D ⊆ Rn → R
uma função contínua num subconjunto não vazio, fechado e limitado
A ⊆ D. Então f tem máximo e mínimo em A.
César Silva (UBI)
Cálculo II
2009/2010
253 / 460
§2.4.2 Teorema de Weierstrass
Exemplo
Sejam
n
o
A = (x, y) ∈ R2 : |x| ≤ 1, |y| ≤ 1
e f a função dada por
f (x, y) = x + y sen x.
A função f é contínua em R2 e, portanto, é contínua em A. Como A é
fechado e limitado, f tem máximo e mínimo no conjunto A.
César Silva (UBI)
Cálculo II
2009/2010
254 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
Derivadas parciais e derivadas direccionais
Diferenciabilidade de funções de Rn em Rm
Derivada da função composta
Derivadas de ordem superior. Teorema de Schwarz
Teorema da função implícita
Extremos locais e extremos absolutos
Extremos condicionados: método dos multiplicadores de Lagrange
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
255 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
Derivadas parciais e derivadas direccionais
Diferenciabilidade de funções de Rn em Rm
Derivada da função composta
Derivadas de ordem superior. Teorema de Schwarz
Teorema da função implícita
Extremos locais e extremos absolutos
Extremos condicionados: método dos multiplicadores de Lagrange
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
256 / 460
§3.1 Derivadas parciais e derivadas direccionais
Comecemos por recordar como se define derivada de funções reais de
variável real. Sejam D um subconjunto não vazio de R, f : D → R e
a ∈ D um ponto de acumulação de D. Diz-se que f é derivável ou
diferenciável em a se existe (e é finito) o limite:
lim
x→a
f (x) − f (a)
.
x−a
Tal limite (quando existe) diz-se a derivada de f no ponto a e
df
(a). Fazendo a
representa-se por f 0 (a), Df (a) ou ainda por
dx
mudança de variável x = a + h, temos
f (a + h) − f (a)
.
h→0
h
f 0 (a) = lim
Aqui têm apenas de se considerar os valores de h tais que a + h ∈ D.
César Silva (UBI)
Cálculo II
2009/2010
257 / 460
§3.1 Derivadas parciais e derivadas direccionais
Diz-se que a função f : D → R é derivável ou diferenciável em D se
for derivável em todo o ponto de D e à nova função
f 0 : D → R,
que a cada ponto x ∈ D faz corresponder f 0 (x), chama-se derivada de
df
f e representa-se também por Df ou
.
dx
César Silva (UBI)
Cálculo II
2009/2010
258 / 460
§3.1 Derivadas parciais e derivadas direccionais
O quociente
f (a + h) − f (a)
h
representa o declive da recta que passa pelos pontos
(a, f (a)) e (a + h, f (a + h)) .
Fazendo h tender para zero, a recta que passa nos pontos
(a, f (a)) e (a + h, f (a + h)) ,
vai tender para a recta tangente ao gráfico de f e que passa no pontos
(a, f (a)). Assim, geometricamente, a derivada de uma função num
ponto do domínio é o declive da recta tangente ao gráfico da função no
ponto considerado. Portanto, a recta tangente ao gráfico de uma
função f no ponto (a, f (a)) é a recta de equação
y = f (a) + f 0 (a)(x − a).
César Silva (UBI)
Cálculo II
2009/2010
259 / 460
§3.1 Derivadas parciais e derivadas direccionais
y = f (a) + f 0 (a)(x − a)
f
f (a
(a +
+ h)
h)
f (a + h)
f (a)
b
b
b
b
b
f 0 (a) = tg α
α
a a + ah + ah + ah + h
Interpretação geométrica do conceito de derivada
César Silva (UBI)
Cálculo II
2009/2010
260 / 460
§3.1 Derivadas parciais e derivadas direccionais
Pretendemos generalizar o conceito de derivada a funções
f : D ⊆ Rn → Rm .
Por uma questão de economia de escrita, consideraremos, inicialmente,
funções
f : D ⊆ R2 → R.
Como habitualmente, escreveremos (x, y) em vez de (x1 , x2 ) para
representar os elementos de R2 .
César Silva (UBI)
Cálculo II
2009/2010
261 / 460
§3.1 Derivadas parciais e derivadas direccionais
Sejam D um subconjunto não vazio de R2 e f : D ⊆ R2 → R uma função.
A derivada parcial de f em relação a x (ou em ordem a x) é a função
∂f
que se obtém derivando (caso a derivada exista) f em relação a x,
∂x
tratando y como se fosse uma constante. Por exemplo, se f : R2 → R é a
função definida por
f (x, y) = 2x3 y − 4x sen(πy),
temos
∂f
(x, y) = 6x2 y − 4 sen(πy).
∂x
De igual modo, a derivada parcial de f em relação a y (ou em ordem a
∂f
que se obtém derivando (caso a derivada exista) f em
y) é a função
∂y
relação a y, tratando x como se fosse uma constante. Assim, no exemplo dado
temos
∂f
(x, y) = 2x3 − 4πx cos(πy).
∂y
César Silva (UBI)
Cálculo II
2009/2010
262 / 460
§3.1 Derivadas parciais e derivadas direccionais
Vejamos como definir de modo mais formal as derivadas parciais.
Sejam D um subconjunto de R2 , f : D ⊆ R2 → R uma função e
(a, b) ∈ D. Suponhamos que (a, b) é um ponto de acumulação de
{(x, y) ∈ D : y = b} .
Representa-se por
∂f
(a, b), fx0 (a, b)
∂x
ou
Dx f (a, b),
a derivada parcial de f em relação a x (ou em ordem a x) no
ponto (a, b) e define-se da seguinte forma
∂f
f (a + h, b) − f (a, b)
(a, b) = lim
h→0
∂x
h
quando este limite exista (e seja finito).
César Silva (UBI)
Cálculo II
2009/2010
263 / 460
§3.1 Derivadas parciais e derivadas direccionais
Analogamente, se (a, b) ∈ D é ponto de acumulação de
{(x, y) ∈ D : x = a} ,
representa-se por
∂f
(a, b), fy0 (a, b)
∂y
ou
Dy f (a, b),
a derivada parcial de f em ordem a y no ponto (a, b) e define-se
da seguinte forma
∂f
f (a, b + k) − f (a, b)
(a, b) = lim
,
k→0
∂y
k
quando este limite existe.
César Silva (UBI)
Cálculo II
2009/2010
264 / 460
§3.1 Derivadas parciais e derivadas direccionais
z
∂f
(a, b) = tg α
∂x
∂f
(a, b) = tg β
∂y
f (a, b)
b
b
y
β
a
α
x
Interpretação geométrica das derivadas parciais
César Silva (UBI)
Cálculo II
2009/2010
265 / 460
§3.1 Derivadas parciais e derivadas direccionais
Seja f : D ⊆ R2 → R uma função. A função que a cada (x, y) associa
∂f
(x, y) designa-se por (função) derivada parcial de f em ordem
∂x
a x e representa-se por
∂f
, fx0
∂x
ou
Dx f.
Obviamente, o seu domínio é o conjunto
(x, y) ∈ D : existe
∂f
(x, y) .
∂x
Do mesmo modo, define-se (função) derivada parcial de f em
ordem a y que se representa por
∂f
, fy0
∂y
César Silva (UBI)
ou
Cálculo II
Dy f.
2009/2010
266 / 460
§3.1 Derivadas parciais e derivadas direccionais
Exemplos de derivadas parciais
a) Considerando a função f : R2 → R definida por
f (x, y) = x2 + y 2 + sen(xy)
temos
e
César Silva (UBI)
∂f
(x, y) = 2x + y cos(xy)
∂x
∂f
(x, y) = 2y + x cos(xy).
∂y
Cálculo II
2009/2010
267 / 460
§3.1 Derivadas parciais e derivadas direccionais
Exemplos de derivadas parciais (continuação)
b) A função f : R2 → R definida por
f (x, y) = sen x2 + y 3 + ex−cos(xy)
tem as seguintes derivadas parciais
e
∂f
(x, y) = 2x cos x2 + y 3 + (1 + y sen (xy)) ex−cos(xy)
∂x
∂f
(x, y) = 3y 2 cos x2 + y 3 + x sen (xy) ex−cos(xy) .
∂y
César Silva (UBI)
Cálculo II
2009/2010
268 / 460
§3.1 Derivadas parciais e derivadas direccionais
Exemplos de derivadas parciais (continuação)
c) Seja f : R2 → R a função definida por
2
(x − 1)y
f (x, y) = (x − 1)2 + y 2
0
Então
se (x, y) 6= (1, 0),
se (x, y) = (1, 0).
f (1 + h, 0) − f (1, 0)
∂f
(1, 0) = lim
= lim
h→0
h→0
∂x
h
0
0
2
= lim h = lim = lim 0 = 0
h→0 h
h→0
h→0 h
(1+h−1)02
(1+h−1)2 +02
h
−0
e
f (1, 0 + k) − f (1, 0)
∂f
(1, 0) = lim
= lim
k→0
k→0
∂y
k
= lim
k→0
César Silva (UBI)
0
k2
k
= lim
k→0
(1−1)k2
(1−1)2 +k2
k
−0
0
= lim 0 = 0.
k k→0
Cálculo II
2009/2010
269 / 460
§3.1 Derivadas parciais e derivadas direccionais
Exemplos de derivadas parciais (continuação)
d) Seja f : R2 → R a função dada por
2
x
f (x, y) = x2 + y 2
0
se (x, y) 6= (0, 0),
se (x, y) = (0, 0).
Então
∂f
f (0 + h, 0) − f (0, 0)
(0, 0) = lim
= lim
h→0
h→0
∂x
h
h2
h2 +02
h
−0
= lim
h→0
h2
h2
h
= lim
h→0
1
h
e este limite não existe. Logo f não tem derivada parcial em ordem a x no
ponto (0, 0). Por outro lado,
f (0, 0 + k) − f (0, 0)
∂f
(0, 0) = lim
= lim
k→0
k→0
∂y
k
0
0
2
= lim k = lim = lim 0 = 0.
k→0 k
k→0 k
k→0
César Silva (UBI)
Cálculo II
02
02 +k2
k
−0
2009/2010
270 / 460
§3.1 Derivadas parciais e derivadas direccionais
Nas definições de derivadas parciais, dadas atrás, consideramos
acréscimos da função quando o ponto do domínio percorre segmentos
paralelos aos eixos. Este facto sugere que generalizemos a definição de
derivadas parcial segundo qualquer direcção.
Dados um subconjunto D de R2 , uma função
f : D ⊆ R2 → R,
a = (a1 , a2 ) ∈ D e u = (u1 , u2 ) um vector de R2 , chama-se derivada
de f no ponto a segundo o vector u ao limite, quando existe,
f (a1 + tu1 , a2 + tu2 ) − f (a1 , a2 )
f (a + tu) − f (a)
= lim
t→0
t→0
t
t
lim
e representa-se por
fu0 (a)
César Silva (UBI)
ou
Du f (a).
Cálculo II
2009/2010
271 / 460
§3.1 Derivadas parciais e derivadas direccionais
Quando
kuk = 1
as derivadas segundo vectores costumam designar-se por derivadas
direccionais, se bem que será mais correcto falar em derivada dirigida
ou derivada radial segundo u pois a derivada, para além de depender
da direcção, também depende do sentido de u.
César Silva (UBI)
Cálculo II
2009/2010
272 / 460
§3.1 Derivadas parciais e derivadas direccionais
z
fu0 (a, b) = tg α
f (a, b)
b
b
a
u
y
α
x
Interpretação geométrica da derivada segundo um vector
César Silva (UBI)
Cálculo II
2009/2010
273 / 460
§3.1 Derivadas parciais e derivadas direccionais
Exemplo
Consideremos a função f : R2 → R definida por
xy 2
f (x, y) = x2 + y 2
0
se (x, y) 6= (0, 0)
se (x, y) = (0, 0)
Fazendo u = (cos α, sen α), α ∈ [0, 2π[, temos
f (0 + t cos α, 0 + t sen α) − f (0, 0)
t
2
2
t cos α t sen α
2 cos2 α + t2 sen2 α
t
= lim
t→0
t
3
t cos α sen2 α
= lim 3
t→0 t (cos2 α + sen2 α)
fu0 (0, 0) = lim
t→0
= sen2 α cos α.
César Silva (UBI)
Cálculo II
2009/2010
274 / 460
§3.1 Derivadas parciais e derivadas direccionais
Dada uma função f : D ⊆ R2 → R e considerando os vectores
e1 = (1, 0) e e2 = (0, 1), temos
f (a + te1 ) − f (a)
t
f (a1 + t, a2 ) − f (a1 , a2 )
= lim
t→0
t
∂f
=
(a)
∂x
fe0 1 (a) = lim
t→0
e
f (a + te2 ) − f (a)
t→0
t
f (a1 , a2 + t) − f (a1 , a2 )
= lim
t→0
t
∂f
=
(a).
∂y
fe0 2 (a) = lim
César Silva (UBI)
Cálculo II
2009/2010
275 / 460
§3.1 Derivadas parciais e derivadas direccionais
No caso geral em que temos uma função
f : D ⊆ Rn → Rm
definimos, para a = (a1 , . . . , an ), as seguintes derivadas parciais:
∂f
f (a1 + h, a2 , . . . , an ) − f (a1 , . . . , an )
∂f
(a) =
(a1 , . . . , an ) = lim
h→0
∂x1
∂x1
h
∂f
f (a1 , a2 + h, a3 , . . . , an ) − f (a1 , . . . , an )
∂f
(a) =
(a1 , . . . , an ) = lim
h→0
∂x2
∂x2
h
..
.
∂f
∂f
f (a1 , . . . , an−1 , an + h) − f (a1 , . . . , an )
(a) =
(a1 , . . . , an ) = lim
h→0
∂xn
∂xn
h
César Silva (UBI)
Cálculo II
2009/2010
276 / 460
§3.1 Derivadas parciais e derivadas direccionais
∂f
(x) designa-se por
∂x1
(função) derivada parcial de f em ordem a x1 e representa-se por
A função que a cada x = (x1 , . . . , xn ) associa
∂f
, fx0 1
∂x1
ou
Dx1 f.
Obviamente, o seu domínio é o conjunto
∂f
(x) .
x ∈ D : existe
∂x1
Do mesmo modo, define-se (função) derivada parcial de f em
ordem a xi , i = 2, . . . , n, que se representa por
∂f
, fx0 i
∂xi
César Silva (UBI)
ou
Cálculo II
Dxi f.
2009/2010
277 / 460
§3.1 Derivadas parciais e derivadas direccionais
Também podemos definir derivadas segundo vectores para funções
f : D ⊆ Rn → Rm .
Assim, se
f : D ⊆ Rn → Rm
e a = (a1 , . . . , an ) ∈ D chama-se derivada de f no ponto a segundo o
vector u = (u1 , . . . , un ) ∈ Rn ao limite, caso este exista,
lim
t→0
f (a1 + tu1 , a2 + tu2 , . . . , an + tun ) − f (a1 , a2 , . . . , an )
f (a + tu) − f (a)
= lim
t→0
t
t
e representa-se por
fu0 (a)
César Silva (UBI)
ou
Du f (a).
Cálculo II
2009/2010
278 / 460
§3.1 Derivadas parciais e derivadas direccionais
Quando
as derivadas
kuk = 1,
fu0 (a)
designam-se por derivadas direccionais, se bem que o mais correcto
seria falar em derivada dirigida ou derivada radial segundo u, pois esta
derivada para além de depender da direcção também depende do
sentido de u.
César Silva (UBI)
Cálculo II
2009/2010
279 / 460
§3.1 Derivadas parciais e derivadas direccionais
Se considerarmos em Rn os vectores e1 = (1, 0, . . . , 0),
e2 = (0, 1, 0, . . . , 0), . . . , en = (0, . . . , 0, 1) temos
fe0 1 (a) =
∂f
(a)
∂x1
fe0 2 (a) =
∂f
(a)
∂x2
..
.
fe0 n (a) =
César Silva (UBI)
∂f
(a).
∂xn
Cálculo II
2009/2010
280 / 460
§3.1 Derivadas parciais e derivadas direccionais
Das propriedades dos limites resulta imediatamente que se
temos
f : D ⊆ Rn → Rm
e
f = (f1 , . . . , fm ) , m > 1
∂f
(a) =
∂x1
∂f1
∂f2
∂fm
(a),
(a), . . . ,
(a)
∂x1
∂x1
∂x1
∂f
(a) =
∂x2
∂f1
∂f2
∂fm
(a),
(a), . . . ,
(a)
∂x2
∂x2
∂x2
∂f1
∂f2
∂fm
(a),
(a), . . . ,
(a)
∂xn
∂xn
∂xn
..
.
∂f
(a) =
∂xn
e para cada vector u ∈ Rn ,
fu0 (a) = (f1 )0u (a), (f2 )0u (a), . . . , (fm )0u (a) .
César Silva (UBI)
Cálculo II
2009/2010
281 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
Derivadas parciais e derivadas direccionais
Diferenciabilidade de funções de Rn em Rm
Derivada da função composta
Derivadas de ordem superior. Teorema de Schwarz
Teorema da função implícita
Extremos locais e extremos absolutos
Extremos condicionados: método dos multiplicadores de Lagrange
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
282 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Uma das primeiras propriedades do cálculo diferencial de funções reais
de variável real diz que se uma função tem derivada num ponto, então
a função é contínua nesse ponto. Para funções com mais do que uma
variável isso não acontece. É possível existirem todas as derivadas
direccionais, sem que a função seja contínua nesse ponto. Vejamos um
exemplo em que isso acontece.
César Silva (UBI)
Cálculo II
2009/2010
283 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Exemplo
Consideremos a função f : R2 → R definida por
x2 y
f (x, y) = x4 + y 2
0
se (x, y) 6= (0, 0),
se (x, y) = (0, 0).
Comecemos por calcular as derivadas parciais
∂f
f (h, 0) − f (0, 0)
0−0
0
(0, 0) = lim
= lim
= lim = lim 0 = 0
h→0
h→0 h
h→0 h
h→0
∂x
h
e
∂f
f (0, k) − f (0, 0)
0−0
0
(0, 0) = lim
= lim
= lim = lim 0 = 0.
k→0
k→0
k→0 k
k→0
∂y
k
k
César Silva (UBI)
Cálculo II
2009/2010
284 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Exemplo (continuação)
Por outro lado, fazendo
u = (cos α, sen α) , α ∈ [0, 2π[,
temos
f (0 + t cos α, 0 + t sen α) − f (0, 0)
t→0
t
2
2
t cos α t sen α
4 cos4 α + t2 cos2 α
t
= lim
t→0
t
2
cos α sen α
= lim 2
t→0 t cos4 α + sen2 α
2
cos α
se α ∈ [0, 2π[\ {0, π},
sen α
=
0
se α ∈ {0, π}.
fu0 (0, 0) = lim
César Silva (UBI)
Cálculo II
2009/2010
285 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Exemplo (continuação)
Vejamos que a função f não é contínua em (0, 0). Fazendo
n
o
A = (x, y) ∈ R2 : y = 0
temos
lim
(x,y)→(0,0)
x∈A
(x,y)→(0,0)
x∈B
n
o
B = (x, y) ∈ R2 : y = x2 ,
0
x2 0
= lim 4 = lim 0 = 0
4
2
x→0 x
x→0
x→0 x + 0
f (x, y) = lim f (x, 0) = lim
x→0
e
lim
e
x2 x2
x4
1
1
=
lim
= lim = ,
x→0 x4 + (x2 )2
x→0 2x4
x→0 2
2
f (x, y) = lim f (x, x2 ) = lim
x→0
o que mostra que não existe limite no ponto (0, 0) e, portanto, a função
não é contínua nesse ponto.
César Silva (UBI)
Cálculo II
2009/2010
286 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Este exemplo mostra que uma função ter derivadas parciais ou
derivadas direccionais não é uma condição suficiente para que uma
função seja contínua num ponto. É, portanto, necessário um conceito
mais forte.
César Silva (UBI)
Cálculo II
2009/2010
287 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Pode-se provar que
Uma função f : D ⊆ R → R tem derivada no ponto a ∈ D de
acumulação de D se e só se existem um número real c e uma
função r : D∗ → R tais que
f (a + h) = f (a) + ch + r(h) para cada h ∈ D ∗
e
r(h)
= 0,
h→0 h
lim
onde
D ∗ = {h ∈ R : a + h ∈ D} .
Além disso, nas condições anteriores tem-se c = f 0 (a).
César Silva (UBI)
Cálculo II
2009/2010
288 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Assim, dados uma função f : D ⊆ R2 → R e um ponto (a, b) interior a
D, dizemos que f é diferenciável em (a, b) se existirem as derivadas
parciais de f no ponto (a, b) e existir uma função r : D ∗ → R, onde
n
o
D ∗ = (h, k) ∈ R2 : (a + h, b + k) ∈ D ,
tal que
r(h, k)
=0
(h,k)→(0,0) k(h, k)k
lim
e
f (a + h, b + k) = f (a, b) +
∂f
∂f
(a, b)h +
(a, b)k + r(h, k)
∂x
∂y
para quaisquer (h, k) ∈ D ∗ .
César Silva (UBI)
Cálculo II
2009/2010
289 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Fazendo (h, k) → (0, 0) em
f (a + h, b + k) = f (a, b) +
∂f
∂f
(a, b)h +
(a, b)k + r(h, k)
∂x
∂y
temos
lim
(h,k)→(0,0)
=
lim
f (a + h, b + k)
(h,k)→(0,0)
= f (a, b)
∂f
∂f
f (a, b) +
(a, b)h +
(a, b)k + r(h, k)
∂x
∂y
o que mostra que uma função é contínua nos pontos onde é
diferenciável!
César Silva (UBI)
Cálculo II
2009/2010
290 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Exemplos
a) Seja f : R2 → R a função definida por
f (x, y) =
2 2
x y
x2 + y 2
0
se (x, y) 6= (0, 0),
se (x, y) = (0, 0),
e estudemos a diferenciabilidade de f no ponto (0, 0). Para f ser
diferenciável em (0, 0) tem de existir r : R2 → R tal que
r(h, k)
√
=0
(h,k)→(0,0)
h2 + k2
lim
e
f (h, k) = f (0, 0) +
∂f
∂f
(0, 0) h +
(0, 0) k + r(h, k)
∂x
∂y
para qualquer (h, k) ∈ R2 .
César Silva (UBI)
Cálculo II
2009/2010
291 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Exemplos (continuação)
a) (continuação) Assim, calculemos as derivadas parciais de f no
ponto (0, 0):
h2 .02
−0
2
2
f (h, 0) − f (0, 0)
0
∂f
(0, 0) = lim
= lim h + 0
= lim = lim 0 = 0,
h→0
h→0
h→0 h
h→0
∂x
h
h
02 .k 2
−0
2
2
∂f
f (0, k) − f (0, 0)
0
(0, 0) = lim
= lim 0 + k
= lim = lim 0 = 0.
k→0
k→0
k→0 k
k→0
∂y
k
k
De
f (h, k) = f (0, 0) +
resulta que
César Silva (UBI)
∂f
∂f
(0, 0) h +
(0, 0) k + r(h, k)
∂x
∂y
h2 k2
= r(h, k).
h2 + k2
Cálculo II
2009/2010
292 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Exemplos (continuação)
a) (continuação) Como
r(h, k)
√
lim
=
(h,k)→(0,0)
h2 + k2
h2 k 2
2
2
√ h +k
lim
(h,k)→(0,0)
h2 + k2
h2 k2
√
=
lim
(h,k)→(0,0) (h2 + k 2 ) h2 + k 2
k
h2
√
=
lim
k 2
2
(h,k)→(0,0) h + k
h2 + k2
=0
h2
k
são limitadas, podemos
e √
2
2
2
h +k
h + k2
concluir que a função é diferenciável em (0, 0).
pois as funções
César Silva (UBI)
Cálculo II
2009/2010
293 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Exemplos (continuação)
b) Estudemos no ponto (0, 0) a diferenciabilidade da função
f : R2 → R dada por
x2 y
f (x, y) = x2 + y 2
0
se (x, y) 6= (0, 0),
se (x, y) = (0, 0).
Comecemos por calcular as derivadas parciais de f no ponto (0, 0):
f (h, 0) − f (0, 0)
∂f
(0, 0) = lim
= lim
h→0
h→0
∂x
h
h2 .0
−0
0
+ 02
= lim = lim 0 = 0
h→0 h
h→0
h
h2
e
02 .k
−0
2
2
f (0, k) − f (0, 0)
0
∂f
(0, 0) = lim
= lim 0 + k
= lim = lim 0 = 0.
k→0
k→0
k→0 k
k→0
∂y
k
k
César Silva (UBI)
Cálculo II
2009/2010
294 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Exemplos (continuação)
b) (continuação) Para f ser diferenciável no ponto (0, 0) tem de existir
r(h, k)
√
=0e
r : R2 → R tal que
lim
(h,k)→(0,0)
h2 + k2
f (h, k) = f (0, 0) +
∂f
∂f
(0, 0) h +
(0, 0) k + r(h, k).
∂x
∂y
Desta última igualdade vem
r(h, k) =
h2 k
.
h2 + k2
Vejamos que não existe
h2 k
r(h, k)
√
√
=
lim
.
(h,k)→(0,0)
h2 + k2 (h,k)→(0,0) (h2 + k2 ) h2 + k2
lim
César Silva (UBI)
Cálculo II
2009/2010
295 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Exemplos (continuação)
b) (continuação) Fazendo A = (h, k) ∈ R2 : h = k temos
r(h, k)
h
r(h, h)
h3
√
√
= lim √
= lim √
= lim
2
2
2
2
2
2
h→0 2 2|h|
h→0
h→0 2h
(h,k)→(0,0)
h +k
h +h
2h
lim
(h,k)∈A
e este último limite não existe porque
lim
h→0+
1
h
√
= √
2 2|h|
2 2
e
lim
h→0−
1
h
√
=− √ .
2 2|h|
2 2
Logo não existe
r(h, k)
√
(h,k)→(0,0)
h2 + k2
lim
e, portanto, f não é diferenciável em (0, 0).
César Silva (UBI)
Cálculo II
2009/2010
296 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Dada uma função f : D ⊆ R2 → R diferenciável num ponto (a, b)
interior a D, chama-se plano tangente ao gráfico de f no ponto
(a, b, f (a, b)) ao plano definido pela equação
z = f (a, b) +
∂f
∂f
(a, b)(x − a) +
(a, b)(y − b).
∂x
∂y
Por exemplo, para a função f : R2 → R definida por
f (x, y) =
2 2
x y
x2 + y 2
0
se (x, y) 6= (0, 0),
se (x, y) = (0, 0),
que já vimos ser diferenciável em (0, 0), o plano tangente ao gráfico de
f no ponto (0, 0, f (0, 0)) é dado pela equação
z = 0.
César Silva (UBI)
Cálculo II
2009/2010
297 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Se f : D ⊆ R2 → R diferenciável num ponto (a, b) interior a D, a
L(x, y) = f (a, b) +
∂f
∂f
(a, b)(x − a) +
(a, b)(y − b)
∂x
∂y
chamamos aproximação linear de f no ponto (a, b) e costuma
escrever-se
f (x, y) ≈ f (a, b) +
César Silva (UBI)
∂f
∂f
(a, b)(x − a) +
(a, b)(y − b).
∂x
∂y
Cálculo II
2009/2010
298 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Exemplo
Seja f : R2 → R a função dada por f (x, y) = x ey + sen y. Esta função é
diferenciável no ponto (0, 0). Como
∂f
(x, y) = ey
∂x
temos
e
∂f
(x, y) = x ey + cos y
∂y
∂f
(0, 0) = 1 e
∂x
∂f
(0, 0) = 1.
∂y
Tendo em conta que f (0, 0) = 0, uma equação do plano tangente ao
gráfico de f no ponto (0, 0, f (0, 0)) = (0, 0, 0) é
z = f (0, 0) +
= x + y.
César Silva (UBI)
∂f
∂f
(0, 0)(x − 0) +
(0, 0)(y − 0)
∂x
∂y
Cálculo II
2009/2010
299 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Exemplo (continuação)
A aproximação linear de f no ponto (0, 0) é dada por
f (x, y) ≈ f (0, 0) +
≈ x + y.
∂f
∂f
(0, 0)(x − 0) +
(0, 0)(y − 0)
∂x
∂y
Usando a aproximação linear temos
De facto,
f (0.1, 0.2) ≈ 0.1 + 0.2 = 0.3
f (0.1, 0.2) = 0.3208096066...
e f (1, 1) ≈ 1 + 1 = 2.
e f (1, 1) = 3.559752813...
ou seja, a primeira aproximação é bastante melhor do que a segunda.
Tal deve-se ao facto de a distância de (0.1, 0.2) a (0, 0) ser menor do
que a distância de (1, 1) a (0, 0).
César Silva (UBI)
Cálculo II
2009/2010
300 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Uma função f : D ⊆ Rn → R diz-se diferenciável num ponto interior
a = (a1 , . . . , an ) de D se existirem todas as derivadas parciais de f no
ponto a e uma função r : D∗ → R, onde
tal que
D ∗ = {h = (h1 , . . . , hn ) ∈ Rn : a + h ∈ D} ,
r(h)
=0
khk→0 khk
lim
e
f (a + h) = f (a) +
∂f
∂f
(a)h1 + · · · +
(a)hn + r(h),
∂x1
∂xn
isto é,
f (a1 + h1 , . . . , an + hn )
∂f
∂f
= f (a1 , . . . , an ) +
(a1 , . . . , an )h1 + · · · +
(a1 , . . . , an )hn + r(h1 , . . . , hn ),
∂x1
∂xn
para cada vector h = (h1 , . . . , hn ) ∈ D ∗ .
César Silva (UBI)
Cálculo II
2009/2010
301 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Tal como acontecia para funções de R2 para R, se f é diferenciável em
a ∈ D, então f é contínua em a.
César Silva (UBI)
Cálculo II
2009/2010
302 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Uma função f : D ⊆ Rn → Rm , com f = (f1 , . . . , fm ), diz-se
diferenciável num ponto a = (a1 , . . . , an ) interior a D se todas as
funções f1 , . . . , fm são diferenciáveis em a.
Assim, f é diferenciável em a se as funções f1 , . . . , fm admitem, no
ponto a, derivadas parciais em relação a todas as variáveis e existem
funções r1 , . . . , rm : D ∗ → R tais que
∂f1
∂f1
(a)h1 + · · · +
(a)hn + r1 (h)
f1 (a + h) = f1 (a) +
∂x1
∂xn
.
..
∂fm
∂fm
fm (a + h) = fm (a) +
(a)h1 + · · · +
(a)hn + rm (h)
∂x1
∂xn
para cada h = (h1 , . . . , hn ) ∈ D ∗ = {h = (h1 , . . . , hn ) ∈ Rn : a + h ∈ D}
e
rm (h)
r1 (h)
= · · · = lim
= 0.
lim
khk→0 khk
khk→0 khk
César Silva (UBI)
Cálculo II
2009/2010
303 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Usando matrizes temos que f é diferenciável em a = (a1 , . . . , an ) se e só
se as funções f1 , . . . , fm admitem, no ponto a, derivadas parciais em
relação a todas as variáveis e existem funções r1 , . . . , rm : D∗ → R tais
que
f1 (a + h)
..
.
fm (a + h)
=
f1 (a)
..
.
fm (a)
para cada h ∈ D ∗ e
lim
khk→0
César Silva (UBI)
+
∂f1
(a)
∂x1
..
.
∂fm
(a)
∂x1
∂f1
h1
r1 (h)
(a)
∂xn
. .
..
..
.
.
. .. + ..
∂fm
···
(a)
hn
rm (h)
∂xn
···
rm (h)
r1 (h)
= · · · = lim
= 0.
khk
khk→0 khk
Cálculo II
2009/2010
304 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
A matriz
∂f1
∂x (a)
1
Ja (f ) = ...
∂fm
(a)
∂x1
∂f1
(a)
∂xn
..
..
.
.
∂fm
···
(a)
∂xn
···
diz-se a matriz jacobiana de f no ponto a.
Quando f é diferenciável em a a matriz jacobiana de f em a designa-se
por derivada de f no ponto a e representa-se por
f 0 (a)
ou
Df (a).
Quando n = m, o determinante de J diz-se o jacobiano da função f e
representa-se por
∂ (f1 , . . . , fn )
.
∂ (x1 , . . . , xn )
César Silva (UBI)
Cálculo II
2009/2010
305 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Propriedades
a) Se f, g : D ⊆ Rn → Rm são diferenciáveis num ponto a interior a D,
então
i) f + g é diferenciável em a e
(f + g)0 (a) = f 0 (a) + g0 (a);
ii) para qualquer λ ∈ R, λf é diferenciável em a e
(λf )0 (a) = λf 0 (a).
César Silva (UBI)
Cálculo II
2009/2010
306 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Propriedades
b) Se f, g : D ⊆ Rn → R são diferenciáveis num ponto a interior a D,
então
i) f.g é diferenciável em a e
(f.g)0 (a) = f 0 (a)g(a) + f (a)g0 (a);
ii) se g(a) 6= 0,
f
é diferenciável em a e
g
0
f
g
César Silva (UBI)
(a) =
f 0 (a)g(a) − f (a)g0 (a)
.
[g(a)]2
Cálculo II
2009/2010
307 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Propriedades
c) Se f : D ⊆ Rn → Rm é diferenciável em a e u = (u1 , . . . , un ) ∈ Rn ,
então existe fu0 (a) e
∂f1
∂x (a)
1
..
fu0 (a) = f 0 (a) .u =
.
∂fm
(a)
∂x1
∂f1
(a) u1
∂xn
..
..
..
.
.
.
.
∂fm
···
(a)
un
∂xn
···
d) Sejam D um subconjunto de Rn e f : D ⊆ Rn → R uma função
para a qual existem todas as derivadas parciais. Então f é
diferenciável em todos os pontos em que n − 1 dessas derivadas
parciais são contínuas. Em particular, se todas as derivadas parciais
são contínuas num ponto, a função é diferenciável nesse ponto.
César Silva (UBI)
Cálculo II
2009/2010
308 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
Dada uma função
f : D ⊆ Rn → R,
chama-se gradiente de f no ponto a ∈ D, e representa-se por
(∇f ) (a) ou
ao vector
(∇f ) (a) =
(grad f ) (a),
∂f
∂f
(a), . . . ,
(a) ,
∂x1
∂xn
desde que existam todas as derivadas parciais (de primeira ordem) de f
no ponto a.
César Silva (UBI)
Cálculo II
2009/2010
309 / 460
§3.2 Diferenciabilidade de funções de Rn em Rm
É de notar que se f : D ⊆ Rn → R é uma função diferenciável num
ponto a interior a D, a propriedade c) que vimos anteriormente fica
fu0 (a)
u1
∂f
∂f
∂f
∂f
(a) · · ·
(a) · ... =
(a) u1 + · · · +
(a) un .
=
∂x1
∂xn
∂x
∂x
1
n
un
Recordando que dados b = (b1 , . . . , bn ) e c = (c1 , . . . , cn ) em Rn , o
produto escalar ou interno entre b e c é dado por
hb, ci = b1 c1 + b2 c2 + · · · + bn cn ,
tem-se
fu0 (a) =
César Silva (UBI)
∂f
∂f
(a) u1 + · · · +
(a) un = h(∇f )(a), ui .
∂x1
∂xn
Cálculo II
2009/2010
310 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
Derivadas parciais e derivadas direccionais
Diferenciabilidade de funções de Rn em Rm
Derivada da função composta
Derivadas de ordem superior. Teorema de Schwarz
Teorema da função implícita
Extremos locais e extremos absolutos
Extremos condicionados: método dos multiplicadores de Lagrange
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
311 / 460
§3.3 Derivada da função composta
Derivada da função composta
Sejam
f : Df ⊆ Rn → Rm
g : Dg ⊆ Rm → Rk
e
funções tais que f (Df ) ⊆ Dg . Suponhamos que a é um ponto interior
de Df . Se
f é diferenciável em a
e
g é diferenciável em f (a),
então
g ◦ f é diferenciável em a
e
(g ◦ f )0 (a) = g0 (f (a)) · f 0 (a).
César Silva (UBI)
Cálculo II
2009/2010
312 / 460
§3.3 Derivada da função composta
Fazendo
x = (x1 , . . . , xn ) , f (x) = y = (y1 , . . . , ym )
e
g(y) = z = (z1 , . . . , zk )
resulta que a matriz jacobiana de f no ponto a é
∂f1
∂f1
∂x (a) · · · ∂x (a)
1
n
..
..
..
Ja (f ) =
.
.
.
∂fm
∂fm
(a) · · ·
(a)
∂x1
∂xn
e a matriz jacobiana de g no ponto b = f (a) é a matriz
∂g1
∂y1 (b)
..
Jb (g) =
.
∂gk
(b)
∂y1
César Silva (UBI)
∂g1
(b)
∂ym
..
..
.
.
.
∂gk
···
(b)
∂ym
···
Cálculo II
2009/2010
313 / 460
§3.3 Derivada da função composta
Pondo h = g ◦ f , como
h0 (a) = (g ◦ f )0 (a) = g 0 (f (a)) · f 0 (a) = g 0 (b) · f 0 (a),
tem-se
Ja (h) = Jb (g) · Ja (f ).
Assim,
∂h1
(a)
∂x1
..
.
∂hk
(a)
∂x1
e, portanto,
∂h1
(a)
∂xn
..
..
=
.
.
∂hk
···
(a)
∂xn
···
∂g1
(b)
∂y1
..
.
∂gk
(b)
∂y1
∂g1
(b)
∂ym
..
..
.
.
.
∂gk
···
(b)
∂ym
···
∂f1
(a)
∂x1
..
.
∂fm
(a)
∂x1
∂f1
(a)
∂xn
..
..
.
.
∂fm
···
(a)
∂xn
···
∂gi
∂f1
∂gi
∂f2
∂gi
∂fm
∂hi
(a) =
(b)
(a) +
(b)
(a) + · · · +
(b)
(a).
∂xj
∂y1
∂xj
∂y2
∂xj
∂ym
∂xj
para i = 1, . . . , k e j = 1, . . . , n.
César Silva (UBI)
Cálculo II
2009/2010
314 / 460
§3.3 Derivada da função composta
Omitindo os pontos onde estamos a calcular as derivadas parciais e
substituindo as notações
∂hi ∂gi ∂f`
,
e
∂xj ∂y` ∂xj
por
∂zi ∂zi ∂y`
,
e
,
∂xj ∂y` ∂xj
respectivamente, a última igualdade do slide anterior fica
∂zi ∂y1
∂zi ∂y2
∂zi ∂ym
∂zi
=
+
+ ··· +
.
∂xj
∂y1 ∂xj
∂y2 ∂xj
∂ym ∂xj
César Silva (UBI)
Cálculo II
2009/2010
315 / 460
§3.3 Derivada da função composta
Exemplo
Sejam f : R2 → R3 e g : R3 → R2 as funções dadas por
f (x, y) = x2 , 3xy, sen(x + y)
e
g(u, v, w) = (u + v − w, 2uv) .
Estas duas funções são diferenciáveis em todo o seu domínio. Então
pelo que
∂f1
(x, y) = 2x,
∂x
∂f1
(x, y) = 0,
∂y
∂f2
(x, y) = 3y,
∂x
∂f2
(x, y) = 3x,
∂y
∂f3
(x, y) = cos(x + y),
∂x
∂f3
(x, y) = cos(x + y),
∂y
2x
0
3y
3x
J(x,y) (f ) =
.
cos(x + y) cos(x + y)
César Silva (UBI)
Cálculo II
2009/2010
316 / 460
§3.3 Derivada da função composta
Exemplo (continuação)
Quanto à função g, atendendo que g(u, v, w) = (u + v − w, 2uv), temos
∂g1
(u, v, w) = 1,
∂u
e
∂g2
(u, v, w) = 2v,
∂u
e, consequentemente,
∂g1
(u, v, w) = 1,
∂v
∂g2
(u, v, w) = 2u
∂v
"
∂g1
(u, v, w) = −1,
∂w
∂g2
(u, v, w) = 0
∂w
#
1 1 −1
J(u,v,w) (g) =
.
2v 2u 0
César Silva (UBI)
Cálculo II
2009/2010
317 / 460
§3.3 Derivada da função composta
Exemplo (continuação)
Fazendo h = g ◦ f , temos
J(x,y) (h) = Jf (x,y) (g) · J(x,y) (f )
e, portanto, vem
2x
0
−1
3y
3x
.
0
cos(x + y) cos(x + y)
J(x,y) (h) =
"
1
1
6xy 2x2
=
"
2x + 3y − cos(x + y) 3x − cos(x + y)
18x2 y
6x3
César Silva (UBI)
#
Cálculo II
#
2009/2010
318 / 460
§3.3 Derivada da função composta
Exemplo (continuação)
Este resultado pode ser confirmado directamente pois, mantendo
h = g ◦ f , temos
h(x, y) = (g ◦ f )(x, y)
= g(f (x, y))
= g(x2 , 3xy, sen(x + y))
= (x2 + 3xy − sen(x + y), 6x3 y)
pelo que
"
2x + 3y − cos(x + y) 3x − cos(x + y)
J(x,y) (h) =
18x2 y
6x3
César Silva (UBI)
Cálculo II
#
2009/2010
319 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
Derivadas parciais e derivadas direccionais
Diferenciabilidade de funções de Rn em Rm
Derivada da função composta
Derivadas de ordem superior. Teorema de Schwarz
Teorema da função implícita
Extremos locais e extremos absolutos
Extremos condicionados: método dos multiplicadores de Lagrange
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
320 / 460
§3.4 Derivadas de ordem superior. Teorema de Schwarz
Sejam D um subconjunto de R2 e
f : D ⊆ R2 → R
uma função. Suponhamos existe a derivada parcial (de primeira
ordem) de f em relação a x. Designaremos por
fx002 ,
∂2f
,
∂x2
00
fxx
,
Dx22 f
ou
2
Dxx
f
∂ ∂f
, caso exista, e chamar-lhe-emos derivada
∂x ∂x
parcial de segunda ordem da função f duas vezes em ordem a x.
a derivada (fx0 )0x ≡
César Silva (UBI)
Cálculo II
2009/2010
321 / 460
§3.4 Derivadas de ordem superior. Teorema de Schwarz
Do mesmo modo se definem a derivada de segunda ordem de f duas
vezes em relação a y:
fy002
≡
00
fyy
0
∂ ∂f
∂2f
2
0
2
=
≡ Dy2 f ≡ Dyy f = fy
≡
;
y
∂y 2
∂y ∂y
a derivada de segunda ordem de f em relação a x e depois em relação a
y:
0
∂ ∂f
∂2f
2
00
≡ Dxy
f = fx0 y =
;
fxy
≡
∂y∂x
∂y ∂x
a derivada de segunda ordem de f em relação a y e depois em relação a
x:
0
∂2f
∂ ∂f
00
2
fyx
≡
≡ Dyx
f = fy0
.
=
x
∂x∂y
∂x ∂y
César Silva (UBI)
Cálculo II
2009/2010
322 / 460
§3.4 Derivadas de ordem superior. Teorema de Schwarz
A partir das derivadas de segunda ordem podemos definir as derivadas de
terceira ordem, e assim sucessivamente como é ilustrado no esquema seguinte.
2
fx002 ≡
∂ f
∂x2
∂f
fx0 ≡
∂x
00
fxy
≡
∂2f
∂y∂x
∂3f
∂x3
∂3f
≡
∂y∂x2
fx0003 ≡
fx0002 y
000
fxyx
≡
∂3f
∂x∂y∂x
000
fxy
2 ≡
∂3f
∂y 2 ∂x
000
fyx
2 ≡
∂3f
∂x2 ∂y
000
fyxy
≡
∂3f
∂y∂x∂y
fy0002 x ≡
∂3f
∂x∂y 2
f
2
00
fyx
≡
∂ f
∂x∂y
∂f
fy0 ≡
∂y
2
fy002 ≡
César Silva (UBI)
∂ f
∂y 2
Cálculo II
fy0003 ≡
∂3f
∂y 3
2009/2010
323 / 460
§3.4 Derivadas de ordem superior. Teorema de Schwarz
Sejam D um subconjunto de Rn , n > 1, e
f : D ⊆ Rn → Rm
uma função. Dados dois inteiros positivos i e j inferiores ou iguais a n,
∂f
supondo que existe
, representaremos por
∂xi
∂2f
∂xj ∂xi
ou
fx00i xj
∂f
em ordem a xj , caso exista, e
∂xi
chamar-lhe-emos derivada parcial de segunda ordem de f
primeiro em relação a xi e depois em relação a xj .
a derivada parcial de
De forma semelhante podemos definir as derivadas de ordem três, de
ordem quatro, etc.
César Silva (UBI)
Cálculo II
2009/2010
324 / 460
§3.4 Derivadas de ordem superior. Teorema de Schwarz
Exemplos
a) Seja f : R2 → R a função dada por f (x, y) = x4 + 3xy 2 + 4y 3 . Então
∂f
(x, y) = 4x3 + 3y 2
∂x
∂f
(x, y) = 6xy + 12y 2 .
∂y
e
Assim,
∂2f
(x, y) = 12x2
∂x2
∂2f
(x, y) = 6y,
∂y∂x
e
enquanto que
∂2f
(x, y) = 6y
∂x∂y
e
∂2f
(x, y) = 6x + 24y.
∂y 2
Este exemplo parece sugerir que as derivadas cruzadas (ou mistas)
∂2f
∂2f
e
são iguais.
∂y∂x ∂x∂y
César Silva (UBI)
Cálculo II
2009/2010
325 / 460
§3.4 Derivadas de ordem superior. Teorema de Schwarz
Exemplos (continuação)
b) Seja f : R2 → R a função definida por
x3 y
f (x, y) = x2 + y 2
0
se (x, y) 6= (0, 0),
se (x, y) = (0, 0).
00 (0, 0) e f 00 (0, 0). Como
Vamos calcular fxy
yx
fx0 (0, k) − fx0 (0, 0)
k→0
k
00
fxy
(0, 0) = lim
e
fy0 (h, 0) − fy0 (0, 0)
,
h→0
h
00
fyx
(0, 0) = lim
temos de calcular fx0 (0, y) e fy0 (x, 0).
César Silva (UBI)
Cálculo II
2009/2010
326 / 460
§3.4 Derivadas de ordem superior. Teorema de Schwarz
Exemplos (continuação)
b) (continuação) Atendendo a que, para y 6= 0,
h3 y
−0
f (h, y)−f (0, y)
0
h2 y
h2 +y 2
fx0 (0, y) = lim
= lim
= lim 2 2 = 2 = 0
h→0
h→0
h→0 h +y
h
h
y
e
h3 .0
−0
2
2
f
(h,
0)
−
f
(0,
0)
0
fx0 (0, 0) = lim
= lim h + 0
= lim = lim 0 = 0
h→0
h→0
h→0 h
h→0
h
h
temos
fx0 (0, y) = 0.
César Silva (UBI)
Cálculo II
2009/2010
327 / 460
§3.4 Derivadas de ordem superior. Teorema de Schwarz
Exemplos (continuação)
b) (continuação) Por outro lado, para x 6= 0, tem-se
x3 k
−0
2
2
x3
x3
f (x, k)−f (x, 0)
=
=x
= lim x +k
= lim 2
fy0 (x, 0) = lim
k→0
k→0 x +k 2
k→0
k
k
x2
e
03 .k
−0
2
2
f (0, k) − f (0, 0)
0
fy0 (0, 0) = lim
= lim 0 + k
= lim = lim 0 = 0
k→0
k→0
k→0 k
k→0
k
k
temos
fy0 (x, 0) = x.
César Silva (UBI)
Cálculo II
2009/2010
328 / 460
§3.4 Derivadas de ordem superior. Teorema de Schwarz
Exemplos (continuação)
b) (continuação) Usando o facto de
fx0 (0, y) = 0
e
fy0 (x, 0) = x,
tem-se
00
fxy
(0, 0) = lim
k→0
fx0 (0, k) − fx0 (0, 0)
0−0
0
= lim
= lim = lim 0 = 0
k→0
k→0
k
k
k k→0
e
fy0 (h, 0) − fy0 (0, 0)
h−0
h
= lim
= lim = lim 1 = 1,
h→0
h→0 h
h→0
h→0
h
h
00
fyx
(0, 0) = lim
00 e f 00 podem
o que prova que as derivadas mistas (ou cruzadas) fxy
yx
ser diferentes!
César Silva (UBI)
Cálculo II
2009/2010
329 / 460
§3.4 Derivadas de ordem superior. Teorema de Schwarz
Exemplos (continuação)
b) (continuação) Para esta função f : R2 → R que, recorde-se, é dada
por
3
x y
se (x, y) 6= (0, 0),
f (x, y) = x2 + y 2
0
se (x, y) = (0, 0),
se tem
fx0 (x, y) =
e
4
2 3
x y + 2x y
fy0 (x, y) =
César Silva (UBI)
(x2 + y 2 )2
0
5
3 2
x −x y
(x2 + y 2 )2
0
Cálculo II
se (x, y) 6= (0, 0),
se (x, y) = (0, 0),
se (x, y) 6= (0, 0),
se (x, y) = (0, 0).
2009/2010
330 / 460
§3.4 Derivadas de ordem superior. Teorema de Schwarz
Exemplos (continuação)
b) (continuação) Além disso,
00
fxx
(x, y) =
5
3 3
6xy − 2x y
(x2 + y 2 )3
00
fxy
(x, y) =
0
se (x, y) 6= (0, 0),
se (x, y) = (0, 0),
6
4 2
2 4
x + 6x y − 3x y
(x2 + y 2 )3
0
00
fyx
(x, y) =
6
4 2
2 4
x + 6x y − 3x y
(x2 + y 2 )3
1
00
fyy
(x, y) =
César Silva (UBI)
3 3
5
2x y − 6x y
(x2 + y 2 )3
0
se (x, y) 6= (0, 0),
se (x, y) = (0, 0),
se (x, y) 6= (0, 0),
se (x, y) = (0, 0),
se (x, y) 6= (0, 0),
se (x, y) = (0, 0).
Cálculo II
2009/2010
331 / 460
§3.4 Derivadas de ordem superior. Teorema de Schwarz
Acabámos de ver que as derivadas mistas podem não ser iguais. No
entanto, há casos em que é possível garantir à partida que as derivadas
mistas são iguais. O próximo teorema, conhecido como teorema de
Schwarz ou de Clairaut, dá-nos condições em que tal facto acontece.
Teorema de Schwarz
Sejam D um subconjunto aberto de Rn , n > 1, e f : D ⊆ Rn → R uma
função. As derivadas
fx00i xj e fx00j xi
são iguais em todos os pontos em que fx0 i e fx0 j sejam diferenciáveis.
César Silva (UBI)
Cálculo II
2009/2010
332 / 460
§3.4 Derivadas de ordem superior. Teorema de Schwarz
Seja D um subconjunto aberto de Rn . Uma função f : D ⊆ Rn → R
diz-se de classe C k , k ∈ N, se existem todas as derivadas parciais de f
até à ordem k e todas essas derivadas são contínuas.
Corolário do Teorema de Schwarz
Seja D um subconjunto aberto de Rn . Se f : D ⊆ Rn → R é uma
função de classe C 2 , então
fx00i xj (x) = fx00j xi (x)
para qualquer x ∈ D.
Corolário do Teorema de Schwarz
Sejam D um subconjunto aberto de Rn e f : D ⊆ Rn → R uma função
de classe C k . Então é indiferente a ordem de derivação até à ordem k.
César Silva (UBI)
Cálculo II
2009/2010
333 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
Derivadas parciais e derivadas direccionais
Diferenciabilidade de funções de Rn em Rm
Derivada da função composta
Derivadas de ordem superior. Teorema de Schwarz
Teorema da função implícita
Extremos locais e extremos absolutos
Extremos condicionados: método dos multiplicadores de Lagrange
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
334 / 460
§3.5 Teorema da função implícita
Existem funções que não são definidas explicitamente, são apenas
definidas implicitamente. Por exemplo, a equação
(1 + x2 )y + sen x = 0
define implicitamente y como função de x, aliás podemos inclusive
definir explicitamente y como função de x pois a equação dada é
equivalente a
sen x
.
y=−
1 + x2
Será que a equação
(1 + x2 )y + sen(xy) = 0
também define y como função de x? Neste segundo caso não
conseguimos resolver a equação em ordem a y e, por conseguinte, não
podemos fazer o que fizemos no caso anterior.
O teorema da função implícita permite-nos responder a este tipo de
questões. Além disso, permite-nos também calcular a derivada da
função.
César Silva (UBI)
Cálculo II
2009/2010
335 / 460
§3.5 Teorema da função implícita
Teorema da função implícita (n = 2)
Sejam D um subconjunto aberto de R2 e
F : D ⊆ R2 → R
uma função com derivadas parciais de primeira ordem contínuas.
Suponhamos que existe (a, b) ∈ D tal que
∂F
(a, b) 6= 0.
∂y
Então existem um aberto O ⊆ R que contém a e uma e uma só função
F (a, b) = 0
e
f: O ⊆R→R
com derivada contínua tal que
f (a) = b
e
F (x, f (x)) = 0 para qualquer x ∈ O.
César Silva (UBI)
Cálculo II
2009/2010
336 / 460
§3.5 Teorema da função implícita
Nas condições do teorema anterior diz-se que
F (x, y) = 0
define implicitamente y como função de x e usa-se a notação
y(x),
dy
dx
ou
y0
f (x),
df
dx
ou
f 0,
em vez de
respectivamente.
César Silva (UBI)
Cálculo II
2009/2010
337 / 460
§3.5 Teorema da função implícita
Além disso, como
F (x, y(x)) = 0
temos pela derivada da função composta
∂F
∂F
dy
(x, y) +
(x, y)
=0
∂x
∂y
dx
pelo que
∂F
(x, y(x))
dy
.
(x) = − ∂x
∂F
dx
(x, y(x))
∂y
César Silva (UBI)
Cálculo II
2009/2010
338 / 460
§3.5 Teorema da função implícita
Exemplo
Consideremos a função F : R2 → R definida por
F (x, y) = x3 + 2xy + y 4 − 4.
As derivadas parciais de F são
∂F
(x, y) = 3x2 + 2y
∂x
e
∂F
= 2x + 4y 3
∂y
Como as derivadas parciais de F são funções contínuas,
∂F
F (1, 1) = 0 e
(1, 1) = 2 · 1 + 4 · 13 = 6 6= 0,
∂y
pelo teorema da função implícita F (x, y) = 0 define implicitamente y como
função de x num aberto O ⊆ Rn ao qual 1 pertence e y(1) = 1. Além disso,
∂F
∂F
(1, y(1))
(1, 1)
5
dy
∂x
(1) = −
= − ∂x
=− .
∂F
∂F
dx
6
(1, y(1))
(1, 1)
∂y
∂y
César Silva (UBI)
Cálculo II
2009/2010
339 / 460
§3.5 Teorema da função implícita
Vamos agora generalizar o teorema da função implícita para funções
F : D ⊆ Rn+1 → R, n > 1.
Por uma questão de simplicidade de escrita vamos escrever
F (a1 , . . . , an , b)
e
F (x1 , . . . , xn , y)
F (a1 , . . . , an , an+1 )
e
F (x1 , . . . , xn , xn+1 ),
em vez de
respectivamente.
César Silva (UBI)
Cálculo II
2009/2010
340 / 460
§3.5 Teorema da função implícita
Teorema da função implícita
Sejam D um subconjunto aberto de Rn+1 e
F : D ⊆ Rn+1 → R
uma função com derivadas parciais de primeira ordem contínuas.
Suponhamos que existe (a1 , . . . , an , b) ∈ D tal que
∂F
(a1 , . . . , an , b) 6= 0.
∂y
Então existem um aberto O ⊆ Rn que contém (a1 , . . . , an ) e uma e
uma só função
f : O ⊆ Rn → R
F (a1 , . . . , an , b) = 0
e
com derivadas parciais contínuas tal que
f (a1 , . . . , an ) = b
e
F (x1 , . . . , xn , f (x1 , . . . , xn )) = 0 para qualquer (x1 , . . . , xn ) ∈ O.
César Silva (UBI)
Cálculo II
2009/2010
341 / 460
§3.5 Teorema da função implícita
Tal como no caso n + 1 = 2 dizemos que
F (x1 , . . . , xn , y) = 0
define implicitamente y como função de (x1 , . . . , xn ) e usamos a notação
y(x1 , . . . , xn )
e
∂y
,
∂xi
f (x1 , . . . , xn )
e
∂f
,
∂xi
em vez de
respectivamente.
César Silva (UBI)
Cálculo II
2009/2010
342 / 460
§3.5 Teorema da função implícita
Da equação
F (x1 , . . . , xn , y(x1 , . . . , xn )) = 0,
pela derivada da função composta tem-se
∂F
∂y
∂F
(x1 , . . . , xn , y(x1 , . . . , xn )) +
(x1 , . . . , xn ) = 0
(x1 , . . . , xn , y(x1 , . . . , xn ))
∂xi
∂y
∂xi
e, portanto,
∂F
(x1 , . . . , xn , y(x1 , . . . , xn ))
∂y
∂xi
.
(x1 , . . . , xn ) = −
∂F
∂xi
(x1 , . . . , xn , y(x1 , . . . , xn ))
∂y
César Silva (UBI)
Cálculo II
2009/2010
343 / 460
§3.5 Teorema da função implícita
Exemplo
Vejamos que a equação
xyz sen(x + 2y − z) = π
define implicitamente z como função de x e de y numa vizinhança do ponto
(π/2, 1, 2). Para isso consideremos a função
F (x, y, z) = xyz sen(x + 2y − z) − π.
Calculemos as derivadas parciais de F :
∂F
(x, y, z) = yz sen(x + 2y − z) + xyz cos(x + 2y − z),
∂x
∂F
(x, y, z) = xz sen(x + 2y − z) + 2xyz cos(x + 2y − z),
∂y
∂F
(x, y, z) = xy sen(x + 2y − z) − xyz cos(x + 2y − z).
∂z
César Silva (UBI)
Cálculo II
2009/2010
344 / 460
§3.5 Teorema da função implícita
Exemplo (continuação)
Como as derivadas parciais de F são contínuas,
π
π
, 1, 2 = π sen
+2·1−2 −π =π−π =0
F
2
2
e
π
π
∂F π
, 1, 2 = π/2 sen
+ 2 · 1 − 2 − π cos
+ 2 · 1 − 2 = π/2,
∂z 2
2
2
pelo teorema da função implícita, a equação F (x, y, z) = 0 define
implicitamente z como função de x e de y. Além disso,
∂F π
, 1, 2
∂z π 4
2
, 1 = − ∂x 2
=−
=−
∂F
π
∂x 2
π/2
π
, 1, 2
∂z 2
e
∂F π
, 1, 2
∂z π
π
∂y 2
,1 = −
= −2.
=−
∂F π
∂y 2
π/2
, 1, 2
∂z 2
César Silva (UBI)
Cálculo II
2009/2010
345 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
Derivadas parciais e derivadas direccionais
Diferenciabilidade de funções de Rn em Rm
Derivada da função composta
Derivadas de ordem superior. Teorema de Schwarz
Teorema da função implícita
Extremos locais e extremos absolutos
Extremos condicionados: método dos multiplicadores de Lagrange
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
346 / 460
§3.6 Extremos locais e extremos absolutos
Recordemos os conceitos de máximo e de mínimo absoluto.
Seja
f : D ⊆ Rn → R
uma função escalar e A um subconjunto não vazio de D. Dizemos que
f tem um máximo (absoluto) no ponto a ∈ A ou que f (a) é um
máximo (absoluto) de f em A se
f (x) ≤ f (a) para todo o x ∈ A.
Quando
f (x) ≥ f (a) para todo o x ∈ A,
dizemos que f tem um mínimo (absoluto) no ponto a ∈ A ou que
f (a) é um mínimo (absoluto) de f em A.
César Silva (UBI)
Cálculo II
2009/2010
347 / 460
§3.6 Extremos locais e extremos absolutos
Recordemos também o Teorema de Weierstrass.
Teorema de Weierstrass
Seja
f : D ⊆ Rn → R
uma função contínua num subconjunto não vazio, fechado e limitado
A ⊆ D. Então f tem máximo e mínimo em A.
César Silva (UBI)
Cálculo II
2009/2010
348 / 460
§3.6 Extremos locais e extremos absolutos
Sejam D um subconjunto não vazio de Rn e
f : D ⊆ Rn → R
uma função escalar. Dizemos que f tem um máximo local no ponto
a ∈ D se existir ε > 0 tal que
f (x) ≤ f (a) para qualquer x ∈ D ∩ Bε (a)
e que f tem um mínimo local no ponto a ∈ D se existir ε > 0 tal que
f (x) ≥ f (a) para qualquer x ∈ D ∩ Bε (a).
César Silva (UBI)
Cálculo II
2009/2010
349 / 460
§3.6 Extremos locais e extremos absolutos
Um ponto do domínio de uma função em que é atingido um valor de
máximo designa-se por ponto de máximo ou ponto maximizante.
Do mesmo modo, um ponto do domínio de uma função em que é
atingido o valor de mínimo designa-se por ponto de mínimo ou
ponto minimizante.
Os máximos e os mínimos de uma função dizem-se extremos da
função e os pontos onde a função atinge os extremos designam-se por
pontos de extremo ou extremantes.
César Silva (UBI)
Cálculo II
2009/2010
350 / 460
§3.6 Extremos locais e extremos absolutos
Teorema de Fermat
Seja
f : D ⊆ Rn → R
uma função diferenciável num ponto a interior a D. Se f (a) é um
extremo local de f , então
∂f
∂f
∂f
(a) =
(a) = · · · =
(a) = 0.
∂x1
∂x2
∂xn
César Silva (UBI)
Cálculo II
2009/2010
351 / 460
§3.6 Extremos locais e extremos absolutos
Os pontos a ∈ D tais que
∂f
∂f
∂f
(a) =
(a) = · · · =
(a) = 0
∂x1
∂x2
∂xn
designam-se por pontos de estacionaridade ou por pontos críticos.
Os pontos de estacionaridade que não são extremantes designam-se por
pontos de sela.
César Silva (UBI)
Cálculo II
2009/2010
352 / 460
§3.6 Extremos locais e extremos absolutos
Assim, a primeira coisa que temos de fazer para determinar os
extremos locais de uma função
f : D ⊆ Rn → R
diferenciável é resolver o sistema
∂f
(a) = 0,
∂x1
∂f
∂x (a) = 0,
2
César Silva (UBI)
..
.
∂f
(a) = 0.
∂xn
Cálculo II
2009/2010
353 / 460
§3.6 Extremos locais e extremos absolutos
Exemplo
Seja f : R2 → R a função definida por
f (x, y) = x3 + 3x2 − y 2 .
Esta função é diferenciável em todo o seu domínio. Atendendo a que
∂f
(x, y) = 3x2 + 6x
∂x
e
∂f
(x, y) = −2y,
∂y
calculemos os seus pontos de estacionaridade:
∂f
=0
3x2 + 6x = 0
3x(x + 2) = 0
x = 0
x = −2
∂x
⇔
⇔
⇔
∨
−2y = 0
∂f = 0
y = 0
y = 0
y = 0
∂y
Assim, os pontos de estacionaridade de f são (0, 0) e (−2, 0). Será que
algum deles é extremante?
César Silva (UBI)
Cálculo II
2009/2010
354 / 460
§3.6 Extremos locais e extremos absolutos
Exemplo (continuação)
Fazendo y =
√
3x em
f (x, y) = x3 + 3x2 − y 2 .
temos
e, como
e
√
f (x, 3x) = x3 + 3x2 − 3x2 = x3
√
f (x, 3x) > 0 se x > 0
√
f (x, 3x) < 0 se x < 0,
tendo em conta que f (0, 0) = 0, concluímos que (0, 0) não é
extremante, ou seja, é um ponto de sela.
César Silva (UBI)
Cálculo II
2009/2010
355 / 460
§3.6 Extremos locais e extremos absolutos
Exemplo (continuação)
Por outro lado,
f (x, y) − f (−2, 0) = x3 + 3x2 − y 2 − 4
= x3 + 2x2 + x2 − 4 − y 2
= x2 (x + 2) + (x − 2)(x + 2) − y 2
= (x2 + x − 2)(x + 2) − y 2
= (x − 1)(x + 2)(x + 2) − y 2
= (x − 1)(x + 2)2 − y 2
e, como
(x − 1)(x + 2)2 − y 2 ≤ 0 para qualquer x ∈ B1 ((−2, 0)),
o ponto (−2, 0) é um ponto de máximo.
César Silva (UBI)
Cálculo II
2009/2010
356 / 460
§3.6 Extremos locais e extremos absolutos
A forma como no exemplo anterior verificámos que (0, 0) não era
extremante e que (−2, 0) era um maximizante não é muito prática.
Vejamos uma forma mais prática de o fazer. Para isso precisamos da
matriz hessiana. Dada uma função f : D ⊆ Rn → R de classe C 2
chama-se matriz hessiana de f num ponto a ∈ D à matriz
∂2f
∂2f
(a)
(a)
∂x1 ∂x2
∂x1 ∂x1
∂2f
···
(a)
∂x1 ∂xn
∂2f
∂2f
(a)
(a) · · ·
∂x2 ∂x1
∂x2 ∂x2
Hf (a) =
..
..
..
.
.
.
∂2f
∂2f
∂2f
(a)
∂x1 ∂xn
.
..
.
∂2f
(a)
(a) · · ·
(a)
∂xn ∂x1
∂xn ∂x2
∂xn ∂xn
César Silva (UBI)
Cálculo II
2009/2010
357 / 460
§3.6 Extremos locais e extremos absolutos
Suponhamos que a é um ponto de estacionaridade de f e por facilidade
de escrita representemos a matriz hessiana de f no ponto a por
a1,1 a1,2 · · · a1,n
a2,1 a2,2 · · · a2,n
Hf (a) = .
.. . .
..
.
.
.
.
.
an,1 an,2 · · · an,n
César Silva (UBI)
Cálculo II
2009/2010
358 / 460
§3.6 Extremos locais e extremos absolutos
Façamos
∆0 = 1
∆1 = a1,1
a a a a
∆2 = det 1,1 1,2 = 1,1 1,2 a2,1 a2,2
a2,1 a2,2
a1,1 a1,2
a1,1 a1,2 a1,3
∆3 = det a2,1 a2,2 a2,3 = a2,1 a2,2
a3,1 a3,2
a3,1 a3,2 a3,3
..
.
a1,1
a1,1 a1,2 · · · a1,n
a2,1 a2,2 · · · a2,n
a2,1
∆n = det .
= .
.
.
.
..
. . ..
..
..
an,1
an,1 an,2 · · · an,n
a1,3 a2,3 a3,3 a1,2
a2,2
..
.
an,2
· · · a1,n · · · a2,n . = det Hf (a).
..
. .. · · · an,n Os ∆i , i = 1, . . . , n, chamam-se menores principais da matriz Hf (a).
César Silva (UBI)
Cálculo II
2009/2010
359 / 460
§3.6 Extremos locais e extremos absolutos
Então
a) se em
∆0 = 1, ∆1 , ∆2 , . . . , ∆n
só houver permanências de sinal, ou seja, todos os ∆i , i = 1, . . . , n,
são positivos, então f (a) é um mínimo local de f ;
b) se em
∆0 = 1, ∆1 , ∆2 , . . . , ∆n
só houver variações de sinal, ou seja, (−1)i ∆i > 0, i = 1, . . . , n,
então f (a) é um máximo local de f ;
c) se em
∆0 = 1, ∆1 , ∆2 , . . . , ∆n
houver permanências de sinal e variações de sinal, então a é um
ponto de sela.
César Silva (UBI)
Cálculo II
2009/2010
360 / 460
§3.6 Extremos locais e extremos absolutos
Exemplos
a) Voltando ao exemplo inicial da função definida por
já vimos que
f (x, y) = x3 + 3x2 − y 2
∂f
∂f
(x, y) = 3x2 + 6x e
(x, y) = −2y
∂x
∂y
e que os pontos de estacionaridade são (0, 0) e (−2, 0) pois
∂f
=0
3x2 + 6x = 0
3x(x + 2) = 0
x = 0
x = −2
∂x
⇔
⇔
⇔
∨
.
−2y = 0
∂f = 0
y = 0
y = 0
y=0
∂y
Além disso, a matriz hessiana de f é
"
Hf (x, y) =
César Silva (UBI)
6x + 6
0
0
−2
Cálculo II
#
.
2009/2010
361 / 460
§3.6 Extremos locais e extremos absolutos
Exemplos (continuação)
a) (continuação) Assim,
Hf (0, 0) =
"
e, como
∆0 = 1, ∆1 = 6
6
0
0 −2
e
#
∆2 = −12,
o ponto (0, 0) é um ponto de sela. Por outro lado
#
"
−6 0
Hf (−2, 0) =
0 −2
e atendendo a que
∆0 = 1, ∆1 = −6
e
∆2 = 12
o ponto (−2, 0) é um ponto de máximo local.
César Silva (UBI)
Cálculo II
2009/2010
362 / 460
§3.6 Extremos locais e extremos absolutos
Exemplos (continuação)
b) Seja f : R3 → R a função dada por
f (x, y, z) = x2 + y 2 + 3z 2 + yz + 2xz − xy.
Os pontos de estacionaridade de f são dados por
∂f
2x − y + 2z = 0
2x + 2z − y = 0
=0
∂x
∂f
= 0 ⇔ 2y + z − x = 0
⇔ −x + 2y + z = 0
∂y
∂f = 0
2x + y + 6z = 0
6z + y + 2x = 0
∂z
e a matriz hessiana é
x=0
⇔ y=0
z = 0
2 −1 2
Hf (x, y, z) = − 1 2 1 .
2 1 6
César Silva (UBI)
Cálculo II
2009/2010
363 / 460
§3.6 Extremos locais e extremos absolutos
Exemplos (continuação)
b) (continuação) Para esta matriz hessiana
2 −1 2
Hf (0, 0, 0) = −1 2 1 ,
2 1 6
temos
2 −1 2 2 −1 = 3, ∆3 = −1 2 1 = 4,
∆0 = 1, ∆1 = 2, ∆2 = −1 2
2 1 6
pelo que f tem um mínimo local no ponto (0, 0, 0).
César Silva (UBI)
Cálculo II
2009/2010
364 / 460
§3.6 Extremos locais e extremos absolutos
Observações
a) Se f (a) é um mínimo local de f , então
∆1 ≥ 0, ∆2 ≥ 0, . . . , ∆n ≥ 0.
b) Se f (a) é um máximo local de f , então
∆1 ≤ 0, ∆2 ≥ 0, . . . , (−1)n ∆n ≥ 0.
c) O recíproco das duas alíneas anteriores é falso.
d) Outro processo de determinar se um ponto de estacionaridade é
extremante utiliza os valores próprios da matriz hessiana.
i) Se os valores próprios da matriz hessiana são todos positivos, então
temos um ponto de mínimo.
ii) Se os valores próprios da matriz hessiana são todos negativos, então
temos um ponto de máximo.
iii) Se a matriz hessiana tiver valores próprios positivos e valores próprios
negativos, então temos um ponto de sela.
iv) Se a matriz hessiana tiver valores próprios nulos, e os valores próprios
não nulos tiverem todos o mesmo sinal nada se pode concluir.
César Silva (UBI)
Cálculo II
2009/2010
365 / 460
§3.6 Extremos locais e extremos absolutos
Exemplo
Calculemos os pontos de estacionaridade da função dada por
f (x, y) = x2 y − y.
Para isso temos de resolver o sistema
∂f
=0
2xy = 0
∂x
⇔
x2 − 1 = 0
∂f = 0
∂y
⇔
y = 0
x = 1
∨
y = 0
.
x = −1
Assim, os pontos de estacionaridade de f são (1, 0) e (−1, 0). A matriz
hessiana de f é
2y 2x
Hf (x, y) =
.
2x 0
César Silva (UBI)
Cálculo II
2009/2010
366 / 460
§3.6 Extremos locais e extremos absolutos
Exemplo (continuação)
Assim,
Hf (1, 0) =
e, portanto,
∆0 = 1, ∆1 = 0
0 2
2 0
e
∆2 = −4.
Pelas alíneas a) e b) das observações concluímos que (1, 0) é um ponto de sela.
Por outro lado,
0 −2
Hf (−1, 0) =
−2 0
e para este caso também temos
∆0 = 1, ∆1 = 0
e ∆2 = −4
o que permite concluir do mesmo modo que (−1, 0) é um ponto de sela.
Podíamos ter chegado à mesma conclusão verificando que os valores próprios
de ambas as matrizes são −2 e 2.
César Silva (UBI)
Cálculo II
2009/2010
367 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
Derivadas parciais e derivadas direccionais
Diferenciabilidade de funções de Rn em Rm
Derivada da função composta
Derivadas de ordem superior. Teorema de Schwarz
Teorema da função implícita
Extremos locais e extremos absolutos
Extremos condicionados: método dos multiplicadores de Lagrange
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
368 / 460
§3.7 Extremos condicionados: método dos multiplicadores de Lagrange
Suponhamos que pretendemos determinar quais as dimensões do
rectângulo de perímetro igual a 2 que tem a área máxima. Designemos
comprimentos dos lados do rectângulo por x e y,
x
y
O que pretendemos é determinar o valor máximo da função
A(x, y) = xy
no conjunto dos pontos (x, y) (ambos não negativos) que verificam
2x + 2y = 2,
ou seja
César Silva (UBI)
x + y = 1.
Cálculo II
2009/2010
369 / 460
§3.7 Extremos condicionados: método dos multiplicadores de Lagrange
Como x + y = 1 é equivalente a y = 1 − x, obtemos para os pontos que
verificam esta condição A(x, y) = A(x, 1 − x) = x(1 − x). Basta
portanto determinar o valor de x ∈ [0, 2] que maximiza a função
A(x, 1 − x). Como
A0 (x, 1 − x) = 0
⇔
[x(1 − x)]0 = 0
⇔
1 − 2x = 0
⇔
1
x= ,
2
podemos construir o seguinte quadro
0
1/2
A0 (x, 1 − x) + +
0
A(x, 1 − x)
% max
2
− −
&
Concluímos que x = 1/2 corresponde a um ponto de máximo da função
cuja segunda coordenada é y = 1 − 1/2 = 1/2. O tal rectângulo é um
quadrado de lado 1/2.
César Silva (UBI)
Cálculo II
2009/2010
370 / 460
§3.7 Extremos condicionados: método dos multiplicadores de Lagrange
Na resolução anterior foi fundamental conseguirmos resolver a equação
x+y =1
em ordem a y. Como fazer se tal não for possível? A resposta é dada
pelo método dos multiplicadores de Lagrange. Vejamos um
exemplo.
César Silva (UBI)
Cálculo II
2009/2010
371 / 460
§3.7 Extremos condicionados: método dos multiplicadores de Lagrange
Exemplo
Pretendemos determinar os extremos absolutos da função
sujeita à condição
f (x, y) = x2 + y
x2 + y 2 = 1.
Para isso consideramos uma nova função
L(x, y, λ) = x2 + y + λ(x2 + y 2 − 1),
e calculamos os seus pontos de estacionaridade:
∂L
∂x (x, y, λ) = 0
2x + 2xλ = 0
∂L
⇔
⇔
1 + 2yλ = 0
∂y (x, y, λ) = 0
∂L
2
2
x +y −1=0
∂λ (x, y, λ) = 0
x = 0
λ = −1
x = 0
⇔
⇔
——– ∨ y = 1/2
λ = −1/2
2
2
y =1
x = 3/4
y = ±1
César Silva (UBI)
Cálculo II
2x(1 + λ) = 0
——–
——–
λ = −1
∨ y = 1/2
√
x = ± 3/2
2009/2010
372 / 460
§3.7 Extremos condicionados: método dos multiplicadores de Lagrange
Exemplo (continuação)
Os candidatos a extremo absoluto são
√
√
(0, 1), (0, −1), ( 3/2, 1/2) e (− 3/2, 1/2).
Como sabemos que o conjunto
C = (x, y) ∈ R2 : x2 + y 2 = 1
é compacto e a função
f (x, y) = x2 + y
é contínua, o Teorema de Weierstrass garante-nos que temos um máximo e
um mínimo absoluto de f em C. Como
√
√
f (0, 1) = 1, f (0, −1) = −1 e f (− 3/2, 1/2) = f ( 3/2, 1/2) = 5/4,
concluímos que o máximo absoluto é 5/4 e o mínimo absoluto é −1.
César Silva (UBI)
Cálculo II
2009/2010
373 / 460
§3.7 Extremos condicionados: método dos multiplicadores de Lagrange
Vamos agora descrever o método geral para determinar os pontos
candidatos a extremo. Dada uma função de classe C 1 ,
f : D ⊆ Rn → R,
para determinar os extremos desta função sujeita às m ≤ n condições
φ1 (x1 , . . . , xn ) = 0, . . . , φm (x1 , . . . , xn ) = 0,
com φ1 , . . . , φm funções de classe C 1 , consideramos a função
L(x1 , . . . , xn , λ1 , . . . , λn )
= f (x1 , . . . , xn ) + λ1 φ1 (x1 , . . . , xn ) + · · · + λm φm (x1 , . . . , xn ).
Determinamos os pontos de estacionaridade desta nova função. Entre
estes pontos encontram-se pontos tais que as primeiras n coordenadas
correspondem às coordenadas dos pontos de extremo da função f .
Os λi que surgem na função L designam-se por multiplicadores de
Lagrange.
César Silva (UBI)
Cálculo II
2009/2010
374 / 460
§3.7 Extremos condicionados: método dos multiplicadores de Lagrange
Exemplos
a) Pretendemos determinar, utilizando os multiplicadores de
Lagrange, os extremos absolutos da função
f (x, y, z) = x + 2y
sujeita às restrições
x + y + z = 1 e y 2 + z 2 = 4.
Como o conjunto
n
o
(x, y, z) ∈ R3 : x + y + z = 1 ∧ y 2 + z 2 = 4
é um conjunto limitado e fechado e a função f é contínua, pelo
Teorema de Weierstrass, f tem máximo e mínimo absolutos neste
conjunto.
Vamos determiná-los usando o método dos multiplicadores de
Lagrange. Escrevemos a nova função
L(x, y, z, λ, µ) = x + 2y + λ(x + y + z − 1) + µ(y 2 + z 2 − 4).
César Silva (UBI)
Cálculo II
2009/2010
375 / 460
§3.7 Extremos condicionados: método dos multiplicadores de Lagrange
Exemplos (continuação)
a) (continuação) Temos
∂L
(x, y, z, λ, µ) = 0
∂x
∂L
∂y (x, y, z, λ, µ) = 0
∂L
(x, y, z, λ, µ) = 0
∂z
∂L
∂λ (x, y, z, λ, µ) = 0
∂L
∂µ (x, y, z, λ, µ)
=0
⇔
César Silva (UBI)
⇔
1+λ = 0
2 + λ + 2µy = 0
λ + 2µz = 0
x+y+z =1
2
2
⇔
y +z =4
λ = −1
√
µ = − 2/4
√
z=− 2
x=1
√
y= 2
∨
Cálculo II
λ=1
√
µ = 2/4
√
z= 2
x=1
√
y=− 2
λ = −1
2µy = −1
2µz = 1
2009/2010
376 / 460
§3.7 Extremos condicionados: método dos multiplicadores de Lagrange
Exemplos (continuação)
a) (continuação) Obtivemos dois candidatos a ponto de extremo:
√
√ √
√
(1, 2, − 2) e (1, − 2, 2).
Uma vez que
f (1,
e
√
√
√
2, − 2) = 1 + 2 2
√ √
√
f (1, − 2, 2) = 1 − 2 2,
√
√
concluímos que 1 + 2 2 é máximo absoluto e que 1 + 2 2 é mínimo
absoluto.
César Silva (UBI)
Cálculo II
2009/2010
377 / 460
§3.7 Extremos condicionados: método dos multiplicadores de Lagrange
Exemplos (continuação)
b) Pretendemos determinar os extremos absolutos da função
no conjunto
f (x, y, z) = x2 + 2xy − 4x + 8y
C = {(x, y) : 0 ≤ x ≤ 1 ∧ 0 ≤ y ≤ 2} .
Como o conjunto C é um conjunto limitado e fechado e a função f é
contínua, pelo Teorema de Weierstrass f tem máximo e mínimo absolutos
neste conjunto. Os extremos absolutos podem estar no interior ou na
fronteira de C.
Começamos por determinar todos os extremos locais de f no interior do
conjunto C. Para tal começamos por determinar os pontos de
estacionaridade de f que estão em C:
(
(
(
∂f
2x + 2y − 4 = 0
y=6
∂x (x, y) = 0
⇔
⇔
.
∂f
(x,
y)
=
0
2x
+
8
=
0
x = −4
∂y
Como o ponto (−4, 6) não está no interior de C concluímos que não há
extremos no interior de C.
César Silva (UBI)
Cálculo II
2009/2010
378 / 460
§3.7 Extremos condicionados: método dos multiplicadores de Lagrange
Exemplos (continuação)
b) (continuação) Vamos agora determinar os pontos de estacionaridade na
fronteira recorrendo ao método dos multiplicadores de Lagrange.
Para o segmento de recta
escrevemos a função
S1 = {(x, y) : y = 0 ∧ 0 ≤ x ≤ 1}
L1 (x, y, λ) = x2 + 2xy − 4x + 8y + λy.
Temos
∂L1
∂x (x, y, λ) = 0
∂L1
∂y (x, y, λ) = 0
∂L1
∂λ (x, y, λ) = 0
2x + 2y − 4 = 0
⇔
2x + 8 + λ = 0
y=0
x = 2
⇔
y=0
λ = −12
.
Obtivemos o ponto (2, 0) no entanto (2, 0) ∈
/ S1 pelo que não o devemos
considerar.
César Silva (UBI)
Cálculo II
2009/2010
379 / 460
§3.7 Extremos condicionados: método dos multiplicadores de Lagrange
Exemplos (continuação)
b) (continuação) Para o segmento de recta
S2 = {(x, y) : y = 2 ∧ 0 ≤ x ≤ 1}
escrevemos a função
L2 (x, y, λ) = x2 + 2xy − 4x + 8y + λ(y − 2).
Temos
∂L2
∂x (x, y, λ) = 0
∂L2
(x, y, λ) = 0
∂y
∂L2 (x, y, λ) = 0
∂λ
⇔
2x + 2y − 4 = 0
2x + 8 + λ = 0
y − 2 = 0
⇔
x = 0
λ = −8
.
y = 2
Obtivemos o ponto (0, 2) no entanto (0, 2) ∈
/ S2 pelo que não o
devemos considerar.
César Silva (UBI)
Cálculo II
2009/2010
380 / 460
§3.7 Extremos condicionados: método dos multiplicadores de Lagrange
Exemplos (continuação)
b) (continuação) Para o segmento de recta
S3 = {(x, y) : x = 0 ∧ 0 ≤ y ≤ 2}
escrevemos a função
L3 (x, y, λ) = x2 + 2xy − 4x + 8y + λx.
Temos
∂L3
∂x (x, y, λ) = 0
∂L3
(x, y, λ) = 0
∂y
∂L3 (x, y, λ) = 0
∂λ
⇔
2x + 2y − 4 + λ = 0
2x + 8 = 0
x = 0
⇔
x = −4
x=0
.
λ = −12
O sistema é impossível pelo que não obtemos candidatos a extremo
neste caso.
César Silva (UBI)
Cálculo II
2009/2010
381 / 460
§3.7 Extremos condicionados: método dos multiplicadores de Lagrange
Exemplos (continuação)
b) (continuação) Para o segmento de recta
S4 = {(x, y) : x = 1 ∧ 0 ≤ y ≤ 2}
escrevemos a função
L4 (x, y, λ) = x2 + 2xy − 4x + 8y + λ(x − 1).
Temos
∂L4
∂x (x, y, λ) = 0
∂L4
(x, y, λ) = 0
∂y
∂L4 (x, y, λ) = 0
∂λ
⇔
2x + 2y − 4 + λ = 0
2x + 8 = 0
x − 1 = 0
⇔
x = −4
x=1
.
λ = −12
O sistema é impossível pelo que não obtemos candidatos a extremo
neste caso.
César Silva (UBI)
Cálculo II
2009/2010
382 / 460
§3.7 Extremos condicionados: método dos multiplicadores de Lagrange
Exemplos (continuação)
b) (continuação) Assim, temos apenas como candidatos as extremo os
pontos de intersecção de cada par de segmentos, isto é os vértices
do rectângulo C:
(0, 2), (0, 0), (1, 0) e (1, 2).
Como referimos, de acordo com o Teorema de Weierstrass, entre as
imagens destes quatro pontos estão os extremos absolutos de f em
C.
Atendendo a que
f (0, 2) = 16, f (0, 0) = 0, f (1, 0) = −3 e f (1, 2) = 17,
concluímos que o máximo absoluto é 17 e o mínimo absoluto é −3.
César Silva (UBI)
Cálculo II
2009/2010
383 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
Integral de Riemann: definição, exemplos e propriedades
Teorema de Fubini
Integração em regiões mais gerais
Mudança de coordenadas
Aplicação ao cálculo de áreas e volumes
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
384 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
Integral de Riemann: definição, exemplos e propriedades
Teorema de Fubini
Integração em regiões mais gerais
Mudança de coordenadas
Aplicação ao cálculo de áreas e volumes
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
385 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
Para definirmos o conceito de integral é necessário explorar primeiro o
conceito de partição de um intervalo fechado e limitado de Rn .
Dados a = (a1 , . . . , an ), b = (b1 , . . . , bn ) ∈ Rn , com ai < bi , i = 1, . . . , n,
designamos os conjuntos da forma
[a, b] = {(x1 , . . . , xn ) ∈ Rn : ai ≤ xi ≤ bi , i = 1, . . . , n}
= [a1 , b1 ] × · · · × [an , bn ]
por intervalo fechado e limitado de Rn .
É fácil de verificar que quando n = 1, os intervalos fechados e limitados
coincidem com os habituais intervalos fechados e limitados de R;
quando n = 2 os intervalos fechados e limitados são rectângulos e
quando n = 3 os intervalos fechados e limitados são paralelepípedos
rectângulos.
César Silva (UBI)
Cálculo II
2009/2010
386 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
Dado um intervalo (fechado e limitado) I = [a, b] de Rn , com
a = (a1 , . . . , an ) e b = (b1 , . . . , bn ), definimos o volume elementar de
I, que denotamos por vol(I), por
vol(I) =
n
Y
(bi − ai ).
i=1
Verifica-se imediatamente que quando n = 1 o volume elementar é o
comprimento do intervalo, para n = 2 o volume elementar é a área do
rectângulo e que quando n = 3 o volume elementar é o volume usual do
paralelepípedo.
César Silva (UBI)
Cálculo II
2009/2010
387 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
Dado um intervalo fechado e limitado I de Rn , designa-se por
partição ou subdivisão de I qualquer colecção
P = {I1 , . . . , Ik } ,
onde os Ij são intervalos fechados e limitados de Rn não sobrepostos
(i.e. sem pontos interiores comuns) e cuja reunião é I, ou seja,
int Ii ∩ int Ij = ∅ para i, j = 1, . . . , n e i 6= j
e
I=
k
[
Ii .
i=1
É evidente que nestas condições se tem
vol(I) =
k
X
vol(Ii ).
i=1
César Silva (UBI)
Cálculo II
2009/2010
388 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
Exemplo
O conjunto
h
i
h
i
P = {I1 , I2 , I3 , I4 , I5 }
h
i
onde I1 = 0, 14 × 0, 31 , I2 = 0, 14 ×
h
i
1
4, 1
h
1
3
i
× 0,
e I5 =
I4 =
intervalo [0, 1] × [0, 1].
h
i
1
4, 1
×
h
h
1 2
,
i3 3
1
3, 1
i
h
i
, I3 = 0, 14 ×
h
i
2
3, 1
,
constitui uma partição do
1
I3
I5
I2
I1
I4
0
César Silva (UBI)
1
Cálculo II
2009/2010
389 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
Sejam I um intervalo (fechado e limitado) de Rn , P = {I1 , . . . , Ik } uma
partição de I e f : I ⊆ Rn → R uma função limitada. Chama-se soma
superior de Darboux relativa à partição P ao número real
S(f, P ) =
k
X
M (f, Ii ) vol(Ii ),
i=1
onde
M (f, Ii ) = sup {f (x) : x ∈ Ii } = sup f (x).
x∈Ii
Analogamente, chama-se soma inferior de Darboux relativa à
partição P ao número real
s(f, P ) =
k
X
m(f, Ii ) vol(Ii ),
i=1
onde
m(f, Ii ) = inf {f (x) : x ∈ Ii } = inf f (x).
x∈Ii
César Silva (UBI)
Cálculo II
2009/2010
390 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
y
m7
m3
m2 =m4 =m8
m6
m5
m1
b
b
a
∥
x0
x1
x2
x3 x4
x5
x6
x7
b
∥
x8
x
Interpretação geométrica das somas inferiores de Darboux para funções
f: I ⊆R→ R
César Silva (UBI)
Cálculo II
2009/2010
391 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
y
b
b
a
∥
x0
x1
x2
x3 x4
x5
x6
x7
b
∥
x8
x
Interpretação geométrica das somas superiores de Darboux para
funções f : I ⊆ R → R
César Silva (UBI)
Cálculo II
2009/2010
392 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
M (f, B)
M (f, B)
m(f, B)
m(f, B)
B
B
Interpretação geométrica das somas inferiores e das somas superiores
de Darboux para funções f : I ⊆ R2 → R
César Silva (UBI)
Cálculo II
2009/2010
393 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
Exemplos de somas superiores e de somas inferiores
a) Seja I um intervalo de Rn e consideremos a função
f : I ⊆ Rn → R
definida por
f (x) = c.
Dada uma partição P = {I1 , . . . , Ik } de I temos
m(f, Ii ) = c
e
M (f, Ii ) = c
e, consequentemente,
s(f, P ) =
k
X
m(f, Ii ) vol(Ii ) =
S(f, P ) =
k
X
i=1
César Silva (UBI)
c vol(Ii ) = c
M (f, Ii ) vol(Ii ) =
k
X
k
X
vol(Ii ) = c vol(I)
i=1
i=1
i=1
e
k
X
c vol(Ii ) = c
i=1
Cálculo II
k
X
vol(Ii ) = c vol(I).
i=1
2009/2010
394 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
Exemplos de somas superiores e de somas inferiores (continuação)
b) Sejam I um intervalo de Rn e
f : I ⊆ Rn → R
a função definida por
f (x) =
(
0
1
se x ∈ I ∩ Qn ,
se x ∈
6 I ∩ Qn .
Para qualquer partição P = {I1 , . . . Ik } de I temos
m(f, Ii ) = 0
pelo que
s(f, P ) =
k
X
e
M (f, Ii ) = 1,
m(f, Ii ) vol(Ii ) =
i=1
e
S(f, P ) =
k
X
0 vol(Ii ) = 0
i=1
M (f, Ii ) vol(Ii ) =
i=1
César Silva (UBI)
k
X
k
X
1 vol(Ii ) = vol(I).
i=1
Cálculo II
2009/2010
395 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
Seja I um intervalo fechado e limitado de Rn . Uma função
f : I ⊆ Rn → R
diz-se integrável à Riemann em I se existir um e um só número A
tal que
s(f, P ) ≤ A ≤ S(f, P ) para qualquer partição P de I.
O único número A que verifica a desigualdade anterior designa-se por
integral de Riemann de f em I e representa-se por
Z
f (x) dx.
I
César Silva (UBI)
Cálculo II
2009/2010
396 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
Exemplos do integral de Riemann
a) Consideremos novamente a função f : I ⊆ Rn → R definida por
f (x) = c.
Já vimos que para qualquer partição P de I tem-se
s(f, P ) = c vol(I) = S(f, P ).
Assim,
s(f, P ) ≤ c vol(I) ≤ S(f, P ) para qualquer partição P de I
e
c vol(I)
é o único número real que verifica as estas desigualdades. Logo f é
integrável à Riemann em I e
Z
f (x) dx = c vol(I).
I
César Silva (UBI)
Cálculo II
2009/2010
397 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
Exemplos do integral de Riemann (continuação)
b) Já vimos que para a função f : I ⊆ Rn → R, definida por
f (x) =
(
se x ∈ I ∩ Qn ,
se x ∈
6 I ∩ Qn
0
1
se tem
s(f, P ) = 0
e
S(f, P ) = vol(I)
qualquer que seja a partição P de I. Portanto, se A ∈ [0, vol(I)]
tem-se
0 = s(f, P ) ≤ A ≤ S(f, P ) = vol(I)
para qualquer partição P de I, o que mostra que f não é integrável
à Riemann em [0, 1].
César Silva (UBI)
Cálculo II
2009/2010
398 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
É também comum escrever
Z
I
f (x1 , . . . , xn ) dx1 · · · dxn
para designar o integral de Riemann de f no intervalo fechado I. É
ainda usual escrever
Z
bn
an
···
Z
b1
a1
f (x1 , . . . , xn ) dx1 · · · dxn
para designar
Z
[a1 ,b1 ]×···×[an ,bn ]
César Silva (UBI)
f (x1 , . . . , xn ) dx1 · · · dxn .
Cálculo II
2009/2010
399 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
Em dimensão dois é usual escrever f (x, y) em vez de f (x1 , x2 ) e
denota-se assim o integral de Riemann em I por
ZZ
f (x, y) dx dy.
I
Analogamente em dimensão três usa-se frequentemente a notação
ZZZ
f (x, y, z) dx dy dz.
I
Facilmente se verifica que, no caso n = 1, o conceito de integral aqui
apresentado coincide com o conceito de integral de Riemann definido
em Cálculo I.
César Silva (UBI)
Cálculo II
2009/2010
400 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
Propriedades dos integrais
Seja I um intervalo fechado e limitado de Rn .
a) Se
f, g : I ⊆ Rn → R
são funções integráveis em I, então f + g é integrável em I e
Z
[f (x) + g(x)] dx =
I
Z
f (x) dx +
I
Z
g(x) dx.
I
b) Se λ é um número real e
f : I ⊆ Rn → R
é uma função integrável em I, então λ f é integrável em I e
Z
λ f (x) dx = λ
I
César Silva (UBI)
Cálculo II
Z
f (x) dx.
I
2009/2010
401 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
Propriedades dos integrais (continuação)
c) Sejam I1 e I2 dois intervalos (fechados e limitados) de Rn não
sobrepostos e tais que
I = I1 ∪ I2
e seja
f : I ⊆ Rn → R.
Então
f é integrável em I
se e só se
é integrável em I1 e em I2 .
Além disso, nas condições anteriores, temos
Z
I
César Silva (UBI)
f (x) dx =
Z
f (x) dx +
I1
Cálculo II
Z
f (x) dx.
I2
2009/2010
402 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
Propriedades dos integrais (continuação)
d) Se
f, g : I ⊆ Rn → R
são duas funções integráveis em I tais que
f (x) ≤ g(x) para cada x ∈ I,
então
Z
I
César Silva (UBI)
f (x) dx ≤
Z
Cálculo II
g(x) dx.
I
2009/2010
403 / 460
§4.1 Integral de Riemann: definição, exemplos e propriedades
Propriedades dos integrais (continuação)
e) Seja
f : I ⊆ Rn → R
uma função integrável. Então |f | é integrável em I e
Z
Z
f (x) dx ≤
|f (x)| dx.
I
I
f ) Se
f : I ⊆ Rn → R
é uma função contínua, excepto num número finito de pontos, então
f é integrável. Em particular, as funções contínuas são integráveis.
César Silva (UBI)
Cálculo II
2009/2010
404 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
Integral de Riemann: definição, exemplos e propriedades
Teorema de Fubini
Integração em regiões mais gerais
Mudança de coordenadas
Aplicação ao cálculo de áreas e volumes
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
405 / 460
§4.2 Teorema de Fubini
Teorema de Fubini
Sejam I um intervalo fechado e limitado de Rn , J um intervalo fechado
e limitado de Rm e
f : I × J ⊆ Rn × Rm → R
uma função limitada e integrável. Se f é integrável (como função de x)
em I para qualquer y ∈ J, então
Z
I×J
César Silva (UBI)
f (x, y) dx dy =
Z Z
J
Cálculo II
I
f (x, y) dx dy.
2009/2010
406 / 460
§4.2 Teorema de Fubini
Teorema de Fubini para funções contínuas
Sejam I um intervalo fechado e limitado de Rn , J um intervalo fechado
e limitado de Rm e
f : I × J ⊆ Rn × Rm → R
uma função contínua e, consequentemente, integrável à Riemann em
I × J. Então
a) f é integrável (como função de x) em I para qualquer y ∈ J;
b) a função
g(y) =
é integrável em I e
Z
I×J
César Silva (UBI)
Z
f (x, y) dx
I
f (x, y) dx dy =
Z Z
J
Cálculo II
I
f (x, y) dx dy.
2009/2010
407 / 460
§4.2 Teorema de Fubini
Exemplos
a) Calculemos o integral
Z
xy 2 dx dy. Então
[0,1]×[2,3]
Z
xy 2 dx dy =
Z
3Z 1
=
Z
3
Z
3
2
[0,1]×[2,3]
0
2
=
"
2
=
"
xy 2 dx dy
y3
6
x2 y 2
2
#x=1
dy
x=0
y2
− 0 dy
2
#y=3
y=2
19
27 8
− = .
=
6
6
6
César Silva (UBI)
Cálculo II
2009/2010
408 / 460
§4.2 Teorema de Fubini
Exemplos (continuação)
a) (continuação) Este integral também pode ser calculado da seguinte
forma:
Z
xy 2 dx dy =
[0,1]×[2,3]
Z
1
0
=
Z
=
1
1
0
Z
3
xy 2 dy dx
2
0
Z
Z
xy 3
3
y=3
dx
y=2
27x 8x
−
dx
3
3
1
19x
dx
3
0
x=1
19x2
=
6 x=0
19
19
=
−0=
.
6
6
=
César Silva (UBI)
Cálculo II
2009/2010
409 / 460
§4.2 Teorema de Fubini
Exemplos (continuação)
b) Calculemos
Z
xy 2 z dx dy dz:
[0,1]×[0,2]×[1,3]
Z
2
xy z dx dy dz =
[0,1]×[0,2]×[1,3]
=
=
Z
Z
Z
1
1
1
3Z 2Z 1
0
xy 2 z dx dy dz
0
3Z 2
"
3Z 2
y2z
0
0
x2 y 2 z
2
2
#x=1
x=0
dy dz =
"
César Silva (UBI)
3
Cálculo II
Z
3
1
"
y3 z
6
#y=2
dz
y=0
#z=3
8z 2
8z
dz =
12
1 6
8
16
72
−
=
=
12 12
3
=
Z
dy dz
z=1
2009/2010
410 / 460
§4.2 Teorema de Fubini
Exemplos (continuação)
b) (continuação) Outro processo seria
Z
xy 2 z dx dy dz =
Z
1
[0,1]×[0,2]×[1,3]
=
Z
3Z 2Z 1
0
0
z dz
Z
3
1
=
"
z2
2
César Silva (UBI)
Cálculo II
2
y 2 dy
0
z=1
Z
1
x dx
0
#z=3 "
9 1
−
2 2
16
=
3
=
xy 2 z dx dy dz
y3
3
#y=2 "
y=0
x2
2
#x=1
x=0
81
32
2009/2010
411 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
Integral de Riemann: definição, exemplos e propriedades
Teorema de Fubini
Integração em regiões mais gerais
Mudança de coordenadas
Aplicação ao cálculo de áreas e volumes
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
412 / 460
§4.3 Integração em regiões mais gerais
Seja
f : D ⊆ Rn → R
uma função limitada definida num subconjunto limitado D ⊆ Rn .
Sejam I um intervalo de Rn fechado e limitado tal que D está contido
no interior de I e
f˜: I ⊆ Rn → R
a função dada por
f˜(x) =
(
f (x)
0
se x ∈ D
se x ∈ I \ D
Dizemos que f é integrável em D se f˜ for integrável em I e definimos o
integral de f em D por
Z
D
César Silva (UBI)
f (x) dx =
Z
f˜(x) dx.
I
Cálculo II
2009/2010
413 / 460
§4.3 Integração em regiões mais gerais
Verifica-se facilmente que a escolha do intervalo I não influencia a
definição anterior, nem o valor
Z
f (x) dx.
D
As propriedades que vimos para integrais de funções definidas em
intervalos também se verificam para este tipo de integrais. Veremos em
seguida essas propriedades.
César Silva (UBI)
Cálculo II
2009/2010
414 / 460
§4.3 Integração em regiões mais gerais
Propriedades dos integrais
Seja D um subconjunto limitado de Rn .
a) Se
f, g : D ⊆ Rn → R
são funções integráveis em D, então f + g é integrável em D e
Z
[f (x) + g(x)] dx =
D
Z
f (x) dx +
D
Z
g(x) dx.
D
b) Se λ é um número real e
f : D ⊆ Rn → R
é uma função integrável em D, então λ f é integrável em D e
Z
λ f (x) dx = λ
D
César Silva (UBI)
Cálculo II
Z
f (x) dx.
D
2009/2010
415 / 460
§4.3 Integração em regiões mais gerais
Propriedades dos integrais (continuação)
c) Sejam D1 e D2 dois subconjuntos limitados de Rn tais que
int (D1 ∩ D2 ) = ∅
e
D = D1 ∪ D2
e seja
f : D ⊆ Rn → R.
Se
f é integrável em D1 , em D2 e em D,
então
Z
D
César Silva (UBI)
f (x) dx =
Z
f (x) dx +
D1
Cálculo II
Z
f (x) dx.
D2
2009/2010
416 / 460
§4.3 Integração em regiões mais gerais
Propriedades dos integrais (continuação)
d) Se
f, g : D ⊆ Rn → R
são duas funções integráveis em D tais que
f (x) ≤ g(x) para cada x ∈ D,
então
Z
D
César Silva (UBI)
f (x) dx ≤
Z
Cálculo II
g(x) dx.
D
2009/2010
417 / 460
§4.3 Integração em regiões mais gerais
Propriedades dos integrais (continuação)
e) Seja
f : D ⊆ Rn → R
uma função integrável. Então
|f | é integrável em D
e
Z
Z
≤
f
(x)
dx
|f (x)| dx.
D
César Silva (UBI)
D
Cálculo II
2009/2010
418 / 460
§4.3 Integração em regiões mais gerais
Seja D um subconjunto limitado de R2 da forma
D = (x, y) ∈ R2 : a ≤ x ≤ b ∧ ϕ1 (x) ≤ y ≤ ϕ2 (x) ,
onde
ϕ1 , ϕ2 : [a, b] ⊆ R → R
são funções limitadas em [a, b].
y
y = ϕ2 (x)
D
y = ϕ1 (x)
a
César Silva (UBI)
b
Cálculo II
x
2009/2010
419 / 460
§4.3 Integração em regiões mais gerais
Se
f : D ⊆ R2 → R
é uma função limitada e integrável em
n
o
D = (x, y) ∈ R2 : a ≤ x ≤ b ∧ ϕ1 (x) ≤ y ≤ ϕ2 (x) ,
recorrendo ao teorema de Fubini, temos
ZZ
f (x, y) dx dy =
D
Z
b
a
Z
ϕ2 (x)
ϕ1 (x)
f (x, y) dy
!
dx,
desde que a função f (x, y) seja (como função de y) integrável em
[ϕ1 (x), ϕ2 (x)] para qualquer x ∈ [a, b]. Este integral também se
costuma representar por
ZZ
f (x, y) dA.
D
É de referir que se as funções ϕ1 , ϕ2 e f são contínuas, excepto num
número finito de pontos, então f é integrável em D.
César Silva (UBI)
Cálculo II
2009/2010
420 / 460
§4.3 Integração em regiões mais gerais
Analogamente, se D é um subconjunto limitado de Rn da forma
n
o
D = (x, y) ∈ R2 : ψ1 (y) ≤ x ≤ ψ2 (y) ∧ c ≤ y ≤ d ,
onde
ψ1 , ψ2 : [c, d] ⊆ R → R,
tem-se
ZZ
D
César Silva (UBI)
f (x, y) dx dy =
Z
c
d
Z
ψ2 (y)
ψ1 (y)
Cálculo II
f (x, y) dx
!
dy.
2009/2010
421 / 460
§4.3 Integração em regiões mais gerais
Exemplos
a) Seja D ⊆ R2 o conjunto dos pontos de [0, 1] × [0, 1] que estão entre
a parábola de equação y = x2 e a recta de equação y = x.
y = x2
y
1
Calculemos
y=x
bb
1
ZZ
x
xy 2 dA.
D
César Silva (UBI)
Cálculo II
2009/2010
422 / 460
§4.3 Integração em regiões mais gerais
Exemplos (continuação)
a) (continuação) Então
ZZ
Z
1Z x
=
Z
1
=
"
2
xy dA =
D
0
0
=
=
César Silva (UBI)
x2
2
xy dy dx =
Z
0
1
"
x · x3 x(x2 )3
−
dx =
3
3
x5 x8
−
15 24
#x=1
=
x=0
xy 3
3
#y=x
Z
x4 x7
−
dx
3
3
0
1
dx
y=x2
1
1
−
− (0 − 0)
15 24
24 − 15
9
=
15 · 24
15 · 24
1
1
= .
5·8
40
Cálculo II
2009/2010
423 / 460
§4.3 Integração em regiões mais gerais
Exemplos (continuação)
a) (continuação) Este integral também podia ter sido calculado da
seguinte forma:
ZZ
xy 2 dA =
D
Z
1Z
Z
1
0
=
0
"
√
y
xy 2 dx dy =
y
Z
1
0
"
x2 y 2
2
#x=√y
dy
x=y
√
Z 1 3
( y)2 y 2 y 2 y 2
y
y4
−
dy =
−
dy
2
2
2
0 2
#y=1
1
1
y5
y4
− (0 − 0)
= −
=
−
8 10
8
10 y=0
4
1
5
−
= .
=
40 40
40
César Silva (UBI)
Cálculo II
2009/2010
424 / 460
§4.3 Integração em regiões mais gerais
Exemplos (continuação)
b) A função f : R2 → R dada por
f (x, y) = xy 3
é contínua em R2 e o conjunto
n
o
D = (x, y) ∈ R2 : x ≥ 0 ∧ y ≥ 0 ∧ x ≤ −4y 2 + 3
também pode ser também definido por
)
(
√
3
2
2
∧ 0 ≤ x ≤ −4y + 3 .
D = (x, y) ∈ R : 0 ≤ y ≤
2
Logo f é integrável em D.
César Silva (UBI)
Cálculo II
2009/2010
425 / 460
§4.3 Integração em regiões mais gerais
Exemplos (continuação)
b) (continuação) Assim,
ZZ
f (x, y) dx dy =
Z
0
D
=
Z
√
3
2
√
3
2
0
=
Z
0
=
Z
0
√
3
2
√
3
2
Z
3−4y 2
xy 3 dx dy
0
1 2 3
x y
2
x=3−4y2
César Silva (UBI)
9
− 12y 2 + 8y 4 y 3 dy
2
9 3
y − 12y 5 + 8y 7 dy
2
9 4
y − 2y 6 + y 8
8
27
=
.
256
=
dy
x=0
Cálculo II
√
3
2
0
2009/2010
426 / 460
§4.3 Integração em regiões mais gerais
Exemplos (continuação)
b) (continuação) Também podíamos ter definido D da seguinte forma
D=
(
2
(x, y) ∈ R : 0 ≤ x ≤ 3 ∧ 0 ≤ y ≤
r
3−x
4
)
e, portanto,
ZZ
f (x, y) dy dx =
Z
3Z
Z
3
0
D
=
0
=
César Silva (UBI)
"
0
x
4
9x2
128
p 3−x
4
xy 3 dy dx =
−
x3
32
2
+
dx =
x4
256
Cálculo II
Z
x=0
p 3−x
3
9x
x3
−
+
dx
64
32
64
0
#x=3
#y=
xy 4
3
0
3−x
4
"
Z
=
4
4
dx
y=0
3x2
27
.
256
2009/2010
427 / 460
§4.3 Integração em regiões mais gerais
Situações semelhantes às anteriores ocorrem noutras dimensões. Em
particular, em R3 , por exemplo numa região da forma
D = (x, y, z) ∈ R3 : a ≤ x ≤ b ∧ ϕ1 (x) ≤ y ≤ ϕ2 (x) ∧ ψ1 (x, y) ≤ z ≤ ψ2 (x, y) ,
onde
ϕ1 , ϕ2 : [a, b] → R
e
ψ1 , ψ2 : {(x, y) ∈ R2 : a ≤ x ≤ b ∧ ϕ1 (x) ≤ y ≤ ϕ2 (x)} → R
são funções limitadas. Temos nesse caso
ZZZ
f (x, y, z) dx dy dz =
D
Z
b
a
Z
ϕ2 (x)
ϕ1 (x)
Z
ψ2 (x,y)
ψ1 (x,y)
f (x, y, z) dz
!
dy
!
dx
desde que os integrais interiores existam.
Podemos estabelecer resultados semelhantes para regiões como a acima
onde os papeis das variáveis “estejam trocados”.
César Silva (UBI)
Cálculo II
2009/2010
428 / 460
§4.3 Integração em regiões mais gerais
Exemplo
A função f : R3 → R dada por f (x, y, z) = xy é contínua em R3 e, portanto, é
integrável na região
D = (x, y, z) ∈ R3 : 0 ≤ y ≤ 1 ∧ 0 ≤ x ≤ y ∧ 0 ≤ z ≤ x + 2y .
Além disso,
ZZZ
=
Z
f (x, y, z) dx dy dz =
D
1Z y
0
=
Z
0
=
Z
0
1Z
y
Z
1
0
xyz
z=x+2y
0
César Silva (UBI)
4
y
+ y 4 dy =
3
Z
Z
0
x2 y + 2xy 2 dx dy =
Z
0
y
0
dx dy =
z=0
0
1
Z
5
5
y
y
+
15
5
1
xy dz dx dy
0
1Z y
y=1
Cálculo II
x+2y
y=0
xy(x + 2y) dx dy
x=y
x3 y
2 2
dy
+x y
3
x=0
0
=
4
15
2009/2010
429 / 460
§4.3 Integração em regiões mais gerais
Situações semelhantes podem ser resolvidas de forma correspondente
em Rn , n ≥ 4.
Muitas vezes queremos calcular integrais em regiões que se podem
decompor-se em regiões mais simples. Naturalmente, se em cada uma
destas regiões mais simples conseguirmos calcular o integral, apelando
à linearidade do integral relativamente à região de integração, podemos
calcular integral original. O próximo exemplo ilustra esta forma de
proceder.
César Silva (UBI)
Cálculo II
2009/2010
430 / 460
§4.3 Integração em regiões mais gerais
Exemplo
A função f : R2 → R dada por
f (x, y) = 2x2 y
é contínua em R2 e, portanto, é integrável no conjunto
n
D = (x, y) ∈ R2 : |x| ≤ y ≤ 2 − x2
o
pois as funções |x| e 2 − x2 são contínuas. Para calcularmos o integral
de f em D vamos dividir D em duas regiões:
e
n
D1 = (x, y) ∈ R2 : 0 ≤ x ≤ 1 ∧ x ≤ y ≤ 2 − x2
n
o
D2 = (x, y) ∈ R2 : − 1 ≤ x ≤ 0 ∧ −x ≤ y ≤ 2 − x2
o
Como D = D1 ∪ D2 e int (D1 ∩ D2 ) = ∅, podemos calcular o integral
de f em D à custa dos integrais de f em D1 e D2 .
César Silva (UBI)
Cálculo II
2009/2010
431 / 460
§4.3 Integração em regiões mais gerais
Exemplo (continuação)
Assim, porque
ZZ
f (x, y) dx dy =
Z
1
0
D1
=
Z
ZZ
f (x, y) dx dy =
D2
=
Z
1
0
−1
Z 1
0
concluímos que
ZZ
f (x, y) dx dy =
D
César Silva (UBI)
Z
2
2x y dy dx =
x
0
e
2−x2
Z
0
4x2 − 5x4 + x6 dx =
2−x2
Z
1
2x2 y dy dx =
−x
Z
0
4x2 − 5x4 + x6 dx =
ZZ
ZZ
Cálculo II
y=2−x2
y=x
x2 y 2
y=−x
dx
x=1
=
x=0
y=2−x2
x7
4x3
− x5 +
3
7
D2
D1
x2 y 2
4x3
x7
− x5 +
3
7
−1
f (x, y) dx dy +
10
21
dx
x=0
=
x=−1
f (x, y) dx dy =
10
21
20
.
21
2009/2010
432 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
Integral de Riemann: definição, exemplos e propriedades
Teorema de Fubini
Integração em regiões mais gerais
Mudança de coordenadas
Aplicação ao cálculo de áreas e volumes
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
433 / 460
§4.4 Mudança de coordenadas
Muitas vezes é necessário recorrer a outros sistemas de coordenadas
para calcular determinados integrais pois a geometria da região de
integração ou determinadas simetrias da função que queremos integrar
tornam o cálculo consideravelmente mais fácil em determinadas
coordenadas e não noutras.
César Silva (UBI)
Cálculo II
2009/2010
434 / 460
§4.4 Mudança de coordenadas
Seja U ⊆ Rn um conjunto aberto. Dizemos que uma função
g : U ⊆ Rn → Rn
é uma mudança de coordenadas em U se verificar as seguintes
condições:
a) g é de classe C 1 ;
b) g é injectiva;
c) det g0 (x) 6= 0 para todo o x ∈ U .
César Silva (UBI)
Cálculo II
2009/2010
435 / 460
§4.4 Mudança de coordenadas
Teorema de mudança de coordenadas
Sejam U ⊆ Rn um conjunto aberto,
f : D ⊆ Rn → R
uma função integrável em D e
g : U ⊆ Rn → Rn
uma mudança de coordenadas tal que
g(U ) = D.
Então
é integrável em U e
Z
D
César Silva (UBI)
f ◦ g : U ⊆ Rn → R
f (y) dy =
Z
U
f (g(x)) det g0 (x) dx.
Cálculo II
2009/2010
436 / 460
§4.4 Mudança de coordenadas
No caso particular n = 1 recuperamos a fórmula de integração por
substituição, que vimos no Cálculo I. De facto, sejam
f : [a, b] → R
uma função integrável em [a, b] (com a < b) e
g : [c, d] → R
uma mudança de coordenadas com
g([c, d]) = [a, b], g(c) = a e g(d) = b.
César Silva (UBI)
Cálculo II
2009/2010
437 / 460
§4.4 Mudança de coordenadas
Como g é uma mudança de coordenadas, temos que
det g0 (x) = g0 (x) 6= 0 para todo x ∈ D.
Porque g0 é continua (uma vez que g é de classe C 1 em U ) concluímos
que g não muda de sinal em [c, d].
Atendendo a que
g(c) = a < b = g(d)
temos g0 (x) > 0 para todo o x ∈ [c, d]. Assim, |g0 (x)| = g0 (x) e portanto
Z
b
f (x) dx =
a
César Silva (UBI)
Z
c
d
f (g(t))|g0 (t)| dt =
Cálculo II
Z
c
d
f (g(t))g0 (t) dt.
2009/2010
438 / 460
§4.4 Mudança de coordenadas
Em seguida vamos ver as três mudanças de coordenadas mais usadas:
• as coordenadas polares;
• as coordenadas cilíndricas;
• e as coordenadas esféricas.
César Silva (UBI)
Cálculo II
2009/2010
439 / 460
§4.4 Mudança de coordenadas
As coordenadas polares são
coordenadas em R2 definidas por
(
y
b
r
x = r cos θ
y = r sen θ
θ
x
com r ∈ ]0, +∞[ e θ ∈ ]0, 2π[. As variáveis
r e θ correspondem, respectivamente, à distância à origem e ao ângulo
formado pelo vector (x, y) e o semi-eixo positivo dos xx.
César Silva (UBI)
Cálculo II
2009/2010
440 / 460
§4.4 Mudança de coordenadas
Seja
n
o
U = (r, θ) ∈ R2 : r > 0 e θ ∈ ]0, 2π[
e g : U ⊆ R2 → R2 dada por
g(r, θ) = (r cos θ, r sen θ) = (x, y).
Em U podemos concluir que g é injectiva notando que para cada
r0 > 0 fixo, a função
h(θ) = (r0 cos θ, r0 sen θ)
é injectiva (descreve a circunferência de raio r0 com excepção do ponto
(x, y) = (r0 , 0)). Note-se que quando r = 0 perdemos a injectividade.
César Silva (UBI)
Cálculo II
2009/2010
441 / 460
§4.4 Mudança de coordenadas
Temos ainda
0
det g (r, θ) = det
"
cos θ −r sen θ
sen θ r cos θ
#
= r(cos2 θ + sen2 θ) = r
pelo que podemos concluir que g é de classe C 1 em U e que
det g0 (r, θ) 6= 0 para todo o (r, θ) ∈ U.
Obtemos o seguinte caso particular do teorema de mudança de
coordenadas para o caso das coordenadas polares
ZZ
f (x, y) dx dy =
D
com D1 tal que
César Silva (UBI)
ZZ
f (r cos θ, r sen θ)r dr dθ
D1
g(D1 ) = D.
Cálculo II
2009/2010
442 / 460
§4.4 Mudança de coordenadas
Exemplo de mudança para coordenadas polares
Consideremos a região
n
o
D = (x, y) ∈ R2 : x2 + y 2 ≤ 4 e x ≥ y e y ≥ 0 ,
cuja representação geométrica é
y
x2
+
y2
=4
2
y=x
2 x
César Silva (UBI)
Cálculo II
2009/2010
443 / 460
§4.4 Mudança de coordenadas
Exemplo de mudança para coordenadas polares (continuação)
Temos que
ZZ
ex
2 +y 2
dx dy =
D
Z
0
π
=
4
2 Z π/4
2
er r dθ dr =
0
Z
0
2
2
"
2
2
h iθ=π/4
er r θ
0
π er
e r dr =
4 2
r2
Z
#r=2
r=0
=
θ=0
dr
π 4
(e − 1).
8
É de notar que a mudança de coordenadas que fizemos não está nas
condições do Teorema de mudança de coordenadas. No entanto, para
estarmos nas condições do Teorema de mudança de coordenadas
bastaria considerar um conjunto “ligeiramente” mais pequeno e, por
isso, o valor do integral não se altera.
César Silva (UBI)
Cálculo II
2009/2010
444 / 460
§4.4 Mudança de coordenadas
As coordenadas cilíndricas são
coordenadas em R3 definidas por
x = r cos θ
y = r sen θ
z
b
z = z
y
com z ∈ R, r ∈ ]0, +∞[ e θ ∈ ]0, 2π[ e
r
θ
que correspondem de alguma forma
x
a considerar coordenadas polares em
cada plano z = z0 . As variáveis r, θ
correspondem, respectivamente, à distância do ponto (x, y, 0) à origem
e ao ângulo que vector (x, y, 0) faz com o semi-eixo positivo dos xx. A
variável z continua a corresponder à coordenada cartesiana z.
César Silva (UBI)
Cálculo II
2009/2010
445 / 460
§4.4 Mudança de coordenadas
Seja
n
U = (r, θ, z) ∈ R3 : r > 0, θ ∈ ]0, 2π[ e z ∈ R
e g : U ⊆ R3 → R3 dada por
o
g(r, θ, z) = (r cos θ, r sen θ, z) = (x, y, z).
Em U podemos concluir que g é injectiva notando que para cada r0 > 0
e z0 fixos, a função h(θ) = (r0 cos θ, r0 sen θ, z0 ) é injectiva (descreve no
plano z = z0 a circunferência de raio r0 centrada em (0, 0, z0 ) com
excepção do ponto = (r0 , 0, z0 )). Note-se que se r = 0 perdemos a
injectividade. Além disso, que não poderíamos por exemplo considerar
θ ∈ [0, 2π[ uma vez que deixaríamos de ter um conjunto aberto.
César Silva (UBI)
Cálculo II
2009/2010
446 / 460
§4.4 Mudança de coordenadas
Atendendo a que
cos θ −r sen θ 0
det g0 (r, θ, z) = det sen θ r cos θ 0 = r(cos2 θ + sen2 θ) = r
0
0
1
concluímos que g é de classe C 1 em U e que
det g0 (r, θ, z) 6= 0 para todo o (r, θ, z) ∈ U.
Obtemos assim o seguinte caso particular do teorema de mudança de
coordenadas para coordenadas cilíndricas:
ZZZ
f (x, y, z) dx dy dz =
D
onde D1 é tal que
César Silva (UBI)
ZZZ
f (r cos θ, r sen θ, z)r dr dθ dz
D1
g(D1 ) = D.
Cálculo II
2009/2010
447 / 460
§4.4 Mudança de coordenadas
Exemplo de mudança para coordenadas cilíndricas
Consideremos a região
n
o
D = (x, y, z) ∈ R3 : x2 + y 2 ≤ 4 ∧ 1 ≤ z ≤ 2 .
Temos que a função f : R3 → R dada por
f (x, y, z) = cos(x2 + y 2 + z)
é integrável em D e usando coordenadas cilíndricas temos
ZZZ
=
cos(x2 + y 2 + z) dx dy dz
D
Z 2 Z 2π
1
=
Z
1
0
2 Z 2π
0
Z
2
cos(r 2 + z)r dr dθ dz =
0
Z
1
2 Z 2π
1
(sen(4 + z) − sen z) dθ dz =
2
h
= π − cos(4 + z) + cos z
César Silva (UBI)
iz=2
z=1
Z
0
2
1
ir=2
1h
dθ dz
sen(r 2 + z)
r=0
2
π(sen(4 + z) − sen z) dz
= π(− cos 6 + cos 2 + cos 5 − cos 1).
Cálculo II
2009/2010
448 / 460
§4.4 Mudança de coordenadas
Tal como aconteceu com o exemplo da mudança para coordenadas
polares, é de notar que a mudança de coordenadas que fizemos no
exemplo anterior não está nas condições do Teorema de mudança de
coordenadas. No entanto, para estarmos nas condições do Teorema de
mudança de coordenadas bastaria considerar um conjunto
“ligeiramente” mais pequeno e, por isso, o valor do integral não se
altera.
César Silva (UBI)
Cálculo II
2009/2010
449 / 460
§4.4 Mudança de coordenadas
As coordenadas esféricas são
coordenadas em R3 definidas por
z
x = r cos θ sen ϕ
y = r sen θ sen ϕ
z = r cos ϕ
b
r
ϕ
y
com r ∈ ]0, +∞[, θ ∈ ]0, 2π[
θ
e ϕ ∈ ]0, π[. As variáveis r, θ e
x
ϕ correspondem, respectivamente, à
distância do ponto (x, y, z) à origem,
ao ângulo que o vector (x, y, 0) faz com semi-eixo positivo dos xx e ao
ângulo que o vector (x, y, z) faz com o semi-eixo positivo dos zz.
César Silva (UBI)
Cálculo II
2009/2010
450 / 460
§4.4 Mudança de coordenadas
Seja
n
o
U = (r, θ, ϕ) ∈ R3 : r > 0, θ ∈ ]0, 2π[ e ϕ ∈ ]0, π[
e
dada por
g : U ⊆ R3 → R3
g(r, θ, ϕ) = (r cos θ sen ϕ, r sen θ sen ϕ, r cos ϕ) = (x, y, z).
Em U a aplicação g é injectiva. De facto, para cada r0 > 0 fixo, as
variáveis θ ∈ ]0, 2π[ e ϕ ∈ ]0, π[ geram uma esfera de raio r0 com
excepção do meridiano que passa pelo ponto (x, y, z) = (r0 , 0, 0).
César Silva (UBI)
Cálculo II
2009/2010
451 / 460
§4.4 Mudança de coordenadas
Atendendo a que
cos θ sen ϕ −r sen θ sen ϕ r cos θ cos ϕ
det g 0 (r, θ, ϕ) = det sen θ sen ϕ r cos θ sen ϕ r cos ϕ sen θ = −r2 sen ϕ
cos ϕ
0
−r sen ϕ
concluímos que g é de classe C 1 em U e que
det g0 (r, θ, ϕ) 6= 0 para todo o (r, θ, ϕ) ∈ U.
Obtemos portanto o seguinte caso particular do teorema de mudança
de coordenadas para o caso das coordenadas esféricas:
ZZZ
f (x, y, z) dx dy dz
D
=
ZZZ
f (r cos θ sen ϕ, r sen θ sen ϕ, r cos ϕ)r 2 sen ϕ dr dθ dϕ
D1
com D1 tal que
César Silva (UBI)
g(D1 ) = D.
Cálculo II
2009/2010
452 / 460
§4.4 Mudança de coordenadas
Exemplo de mudança para coordenadas esféricas
Se D = (x, y, z) ∈ R3 : 1 ≤ x2 + y 2 + z 2 ≤ 4 , então usando
coordenadas esféricas temos
ZZZ
(x2 + y 2 + z 2 )2 dx dy dz =
Z
2
1
D
=
Z
=
2π
0
2
1
Z
Z
Z
Z
r
6
− cos ϕ
ϕ=π
ϕ=0
θ=2π
2r θ θ=0 dr = 4π
6
1
r4 r2 sen ϕ dϕ dθ dr
0
2π
0
2
π
dθ dr
r7
7
r=2
=
r=1
508
π.
7
Também neste exemplo se verifica algo de semelhante ao que aconteceu
nos exemplos de coordenadas polares e de coordenadas cilíndricas, ou
seja, não estamos nas condições do Teorema de mudança de
coordenadas, mas isso não causa problemas pelas mesmas razões que
também não causava nas duas outras mudanças de coordenadas.
César Silva (UBI)
Cálculo II
2009/2010
453 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
Integral de Riemann: definição, exemplos e propriedades
Teorema de Fubini
Integração em regiões mais gerais
Mudança de coordenadas
Aplicação ao cálculo de áreas e volumes
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
454 / 460
§4.5 Aplicação ao cálculo de áreas e volumes
Como se deduz da construção feita na primeira secção deste capítulo, o
integral de uma função f não negativa com n variáveis, x1 , . . . , xn ,
integrável numa dada região limitada R é numericamente igual ao
volume ((n + 1)-dimensional) da região (n + 1)-dimensional
compreendida entre o seu gráfico e o plano n-dimensional de equação
xn+1 = 0.
Assim concluímos que o volume VR de uma região R ⊆ Rn limitada é
dado por
Z
VR =
caso o integral exista.
César Silva (UBI)
R
1 dx1 · · · dxn ,
Cálculo II
2009/2010
455 / 460
§4.5 Aplicação ao cálculo de áreas e volumes
Em particular, se C ⊆ R2 é uma região limitada, a sua área AC é dada
por
ZZ
AC =
1 dx dy
C
e se D ⊆ R3 é um sólido limitado, o seu volume VD é dado por
VD =
ZZZ
1 dx dy dz,
D
desde que os integrais considerados existam.
César Silva (UBI)
Cálculo II
2009/2010
456 / 460
§4.5 Aplicação ao cálculo de áreas e volumes
Exemplos
a) Seja
o
n
C = (x, y) ∈ R2 : x2 + y 2 ≤ 1 e y ≥ |x| .
A área da região C é dada por
AC =
=
ZZ
Z
0
=
Z
1 dx dy
C
1Z
1
3π
4
π
4
h iθ= 3π
r θ
0
"
π r2
=
2 2
π
= .
4
César Silva (UBI)
r dθ dr
Cálculo II
4
θ= π
4
dr
#r=1
r=0
2009/2010
457 / 460
§4.5 Aplicação ao cálculo de áreas e volumes
Exemplos (continuação)
b) Seja D a região compreendida entre as esferas de raio 1 e de raio 2.
O volume da região D é dado por
VD =
=
ZZZ
Z
1
=
Z
1
=
Z
1 dx dy dz
D
2 Z 2π
0
2 Z 2π
0
2
"
r3
3
28π
=
.
3
César Silva (UBI)
π
r 2 sen ϕ dϕ dθ dr
0
h
r 2 − cos ϕ
h iθ=2π
2r 2 θ
1
= 4π
Z
θ=0
#r=2
iϕ=π
ϕ=0
dθ dr
dr
r=1
Cálculo II
2009/2010
458 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
459 / 460
Índice
1
Sucessões e séries de números reais
2
Funções de Rn em Rm : limites e continuidade
3
Cálculo diferencial em Rn
4
Cálculo integral em Rn
5
Integrais de linha
6
Integrais de superfície
César Silva (UBI)
Cálculo II
2009/2010
460 / 460