103
Revista Brasileira de Ensino de Fsica, vol. 20, no. 2, junho, 1998
Estabilidade das Soluc~oes de Equilbrio Relativo
de um Problema Restrito de Quatro Corpos
(Stability of Equilibrium Solutions in a Restricted Four-Body Problem)
Dante Leal Maranh~
ao
Departamento de Matematica
Universidade Federal de Alagoas
Campus A.C. Sim~oes, 57072-970, Maceio, Alagoas, Brasil
e-mail [email protected]
Trabalho recebido em 12 de setembro de 1997
Estudaremos o movimento de uma massa innitesimal submetida a ac~ao gravitacional newtoniana de tr^es outras massas , 1 ; 2 e , as quais descrevem uma das congurac~oes
centrais encontrada por Eulor em 1767. De fato, o corpo de massa 1 ; esta localizado
no centro de massa e os dois outros est~ao situados em posic~oes simetricas com relac~ao ao
centro de massa. O presente trabalho esta destinado a calcular as seis soluc~oes de equilbrio
relativo deste Problema Restrito de Quatro Corpos e estudar a estabilidade destas soluc~oes.
We study the motion of an innitessimal mass point under the gravitational action of three
mass points of masses , 1 ; 2 and moving under the Newton's law of gravitational
attraction in circular periodic orbits around their center of masses forming at any time a
collinear central conguration. The body of mass 1 ; 2 is located at the center of mass.
The paper proves the existence of six equilibrium point L i = 1 ::: 6 and we study the
stability this solution.
i
1. Introduca~o
A Mec^anica Celeste e denida como o campo de
conhecimento cientco que estuda as consequ^encias
da segunda lei da din^amica, a qual diz que a forca F
que atua sobre uma partcula de massa m e dada por
F = (m v) onde v denota a velocidade, e da lei de
gravitac~ao universal. O problema central da mec^anica
celeste e o problema de n corpos, que consiste em descrever o movimento de n partculas materiais submetidas
unicamente as forcas de atrac~oes mutuas, de acordo
com a lei da gravitac~ao universal. A descric~ao completa desse problema consiste em resolver um sistema
de equac~oes diferenciais ordinarias, o qual so pode ser
resolvido, explicitamente, para o caso n = 2 (problema
de Kepler).
Ainda que as soluc~oes deste problema sejam conhecidas no caso n = 2, sabe-se muito pouco sobre elas
para o caso n 3: E por isso que o problema de tr^es corpos e objeto de grande numero de simplicac~oes. End
dt
tre estas simplicac~oes, merece um destaque especial o
problema restrito de tr^es corpos, isto e, o problema de
tr^es corpos em que uma das massas e innitesimal, de
maneira que sua inu^encia sobre os outros dois sendo
desprezvel, o movimento destes e o de um problema de
dois corpos o problema restrito de tr^es corpos consiste
em descrever o movimento do corpo de massa innitesimal.
O problema de tr^es corpos se coloca como um desao para os matematicos e fsicos que testam suas teorias no intuito de resolv^e-lo. Apos a comprovac~ao de
que este problema n~ao e integravel, passou-se a procurar informac~oes qualitativas a seu respeito, motivando
assim o surgimento de diversas areas em matematica.
Como consequ^encia deste estudo, no nal do seculo
XIX e comeco do seculo XX, surgiu a teoria qualitativa
das equac~oes diferenciais ordinarias, onde destacam-se
os trabalhos de Poincare e Liapunov, dando origem a
teoria dos sistemas din^amicos, que representa uma das
principais areas da matematica contempor^anea.
104
Um movimento periodico dos n corpos e dado por
uma soluc~ao do problema de n corpos, onde todas as
coordenadas dos vetores-posic~ao s~ao func~oes periodicas
de t, com o mesmo perodo.
O movimento periodico mais simples e aquele em
que as coordenadas n~ao variam com o tempo: os corpos est~ao parados e a uma tal soluc~ao chamamos de
soluca~o de equilbrio. O problema de tr^es corpos n~ao
admite este tipo de soluc~ao.
Em seguida, um movimento periodico tambem simples e aquele em que os n corpos movem-se em um
mesmo plano em orbitas circulares em volta do centro de massa, todos com a mesma velocidade angular.
Esta n~ao e uma soluc~ao de equilbrio, no entanto, relativamente a um sistema baric^entrico girando com a
mesma velocidade angular, os n corpos est~ao parados
portanto, nos a chamaremos de soluca~o de equilbrio
Dante Leal Maranh~ao
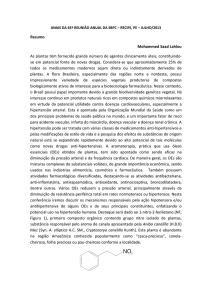
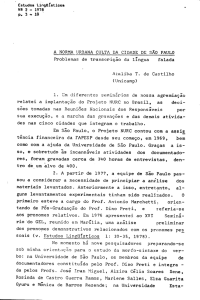
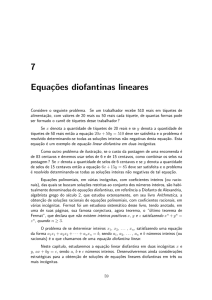
Figura 1.1. Coordenadas siderais (x,y) e coordenadas
sin
odicas (~x y~).
relativo.
Para o problema de tr^es corpos, estas soluc~oes de
fato existem e foram obtidas por Euler em 1767, no
caso colinear, e por Lagrange, em 1772, que re-obteve
as soluc~oes de Euler e mais duas outras, n~ao colineares.
No presente trabalho, consideramos tr^es corpos que
denominaremos de primarios e os quais denotaremos
por P0, P1, P2, com massas m0 , m1 , m2 , respectivamente, movendo-se segundo a lei de gravitac~ao de Newton, em uma soluc~ao de equilbrio colinear do problema
de tr^es corpos. Alem disso, tomaremos m1 = m2 e
a massa m0 situada entre m1 e m2 . Consideraremos
um quarto corpo, de massa m3 , que se move no plano
denido pelas trajetorias dos outros tr^es, atrado por
eles, porem, sem inuencia-los (na pratica pode-se considerar que sua massa e desprezvel com relac~ao a massa
dos demais). Nosso problema restrito plano e circular
de quatro corpos consiste em descrever o movimento do
quarto corpo, isto e, do corpo de massa innitesimal
m3 . Este problema foi introduzido por Moulton em
1900 4].
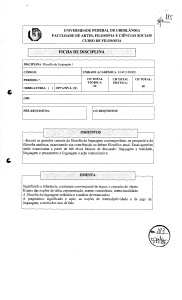
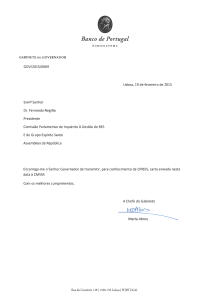
Conforme estudo feito em 3], s~ao exatamente seis
as soluc~oes de equilbrio relativos deste problema restrito distribudas da seguinte maneira: duas soluc~oes
triangulares (denotadas por L5 e L6 ), isto e, formando
tri^angulos isosceles com dois dos primarios, cando o
terceiro situado sobre o segmento de reta que determina a base do referido tri^angulo, e quatro colineares
(denotadas por L1 , L2 , L3 e L4 ), onde o corpo de
massa innitesimal ca situado na reta determinada pelos primarios (ver gura 1.2).
Figura 1.2. Soluc~os de equil
brio relativo.
No ponto de vista din^amico do problema, isto signica dizer que colocando-se a massa innitesimal m3
no ponto de equilbrio relativo com velocidade relativa nula, ela permanecera sempre neste ponto. Uma
quest~ao da mais alta import^ancia e saber se ao tentarmos colocar o corpo de massa innitesimal no ponto de
equilbrio e n~ao conseguirmos em virtude de uma pequena velocidade inicial ou de um pequeno desvio do
ponto, sera que o movimento resultante da massa m3
permanecera proximo do ponto de equilbrio para todo
o tempo. Em caso armativo, diremos que a posica~o
de equilbrio relativo e estavel. Neste trabalho, estudaremos a natureza das soluc~ao de equilbrio colineares
e triangulares.
105
Revista Brasileira de Ensino de Fsica, vol. 20, no. 2, junho, 1998
2. As equac~oes do movimento em coordenadas
siderais e sinodicas
Consideraremos um sistema de refer^encia inercial
com origem no centro de massa 0, e denotaremos por
(X Y ) as coordenadas do corpo de massa innitesimal. Este sistema sera denominado sideral e nele os
primarios, de massas m1 e m2 , descrevem uma mesma
orbita circular de raio a em volta da origem com velocidade angular !.
Utilizando variaveis complexas, as posic~oes dos corpos P0, P1 e P2 ser~ao dadas, respectivamente, por (ver
gura 1.1)
Z0 = 0
Z1 = a exp(i!t )
e
Z2 = a expi(!t + )]
onde t e o tempo.
A posic~ao do corpo de massa innitesimal m3 sera
Z = X + iY . Portanto, a forca gravitacional que as
massas m0 , m1 e m2 , exercem sobre a massa innitesimal m3 dara a equac~ao
c
Z" = ;k
2
m0 Z + m1 Z ; a exp(i!t )] + m2 jZ ; a expi(!t + )]j :
jZ j3 jZ ; a exp(i!t )j3
jZ ; a expi(!t + )]j3
(2:1)
d
onde ' denota derivada com relac~ao a t , e k2 e a constante de gravitac~ao Newtoniana.
Introduziremos agora um novo sistema de refer^encia
denominado sinodico. Neste sistema os eixos de coordenadas giram em mesmo sentido e com a mesma
velocidade angular que os primarios, os quais, consequentemente, cam xos relativamente a este sistema.
O novo sistema tem a grande vantagem de permitir uma
descrica~o do problema, a qual n~ao depende do tempo.
Denotaremos por (~x y~) as coordenadas sinodicas do
corpo de massa innitesimal e consideraremos os eixos
de coordenadas de maneira que a origem esteja no centro de massa, os primarios estejam sobre o eixo x e o
sentido de crescimento neste eixo seja de m2 para m1 .
Estas novas coordenadas se relacionam com as coordenadas siderais atraves da seguinte transformac~ao (ver
gura 1.1):
Z 00 = (~z 00 + 2i!~z 0 ; !2 z~) exp(i!t ):
O equilbrio entre a forca de atraca~o gravitacional e
a forca centrfuga sobre a massa m1 requer que
k2(m2 + 4m0 ) = 4a3!2 :
(2:3)
Substituindo (2.2) e (2.3) em (2.1) obtem-se as
equac~oes diferenciais que regem o movimento e em
seguida fazendo uma transformac~ao de coordenadas,
uma mudanca de escala no tempo e normalizando
as massas, escreve-se as equac~oes do movimento na
seguinte forma (analogas as obtidas por Poincare para
o problema restrito de tr^es corpos)
x ; 2y_ = @!
@x Z = z~ exp(i!t ) onde z~ = x~ + i~y :
onde
Uma facil vericac~ao mostra que
(2:2)
y ; 2x_ = @!
@y c
! = !(x y) = 12 (x2 + y2 ) + 1 ;P 2 + 8
1 1
P1 + P2 (2:4)
106
Dante Leal Maranh~ao
com
2 0 12
P 2 = x2 + y2 P12 = (x ; 1)2 + y2 P22 = (x + 1) + y2 d
e ponto denota derivada com relac~ao ao tempo.
Observe que fazendo = 0 (ou respectivamente
= 1/2) obtem-se o problema Kepler (ou respectivamente) o problema restrito de tr^es corpos com massas
dos primarios iguais (ver 3]).
x2 = y
y1 = x_ ; y
y2 = y_ + x
(3:1)
converte o sistema (2.4) no sistema hamiltoniano
3. Natureza das soluc~oes de equilbrio
x_ 1 = H 1 y
Nesta sec~ao, escreveremos as equac~oes do movimento na forma hamiltoniana, calcularemos e estudaremos a natureza das soluc~oes de equilbrio do sistema
obtido. A transformac~ao de coordenadas
x_ 2 = H 2 y
y_1 = ;H 1 x
y_2 = ;H 2 (3:2)
x
onde
x1 = x
H = (y1 +2 x2) + (y2 +2 x1 ) ; (x1 +2 x2 ) ; U(x1 x2):
2
2
A func~ao diferenciavel H : E ! R2 induz o campo
vetorial X = (H 1 H 2 ;H 1 ;H 2 ). Observe que
a relac~ao entre o hamiltoniano e a integral de Jacobi e
dada por H = ;C=2:
Um ponto p 2 E e dito um ponto de equilbrio do
sistema hamiltoniano (3.2) quando X (p) = 0:
Da express~ao de H e de (3.2) segue-se que os pontos de equilbrio, (x1 x2 y1 y2 ) de (3.2) s~ao dados por
(x1 x2 ;x2 x1), onde x1 e x2 satisfazem as equac~oes
H
y
y
x
x
2
2 2
Portanto, cada um dos seis pontos crticos de ! nos
da uma soluc~ao de equilbrio do sistema hamiltoniano
(3.2).
A matriz da parte linear do sistema hamiltoniano
(3.2), e dada por
H
0
0
B
;
1
M =B
@ ;1 + !
!
! 1 (x1 x2) = 0
! 2 (x1 x2) = 0:
!
x1 x1
1
0
x1 x2
;1 + ! 2
x2 x1
x x2
x
1
0
0
;1
0
1
1
0
1
CC :
A
Portanto, seu polin^omio caracterstico e
x
c
P (t) = t4 + (4 ; !
c
x1 x1
; ! 2 2 )t2 + ! 1 1 ! 2 2 ; (! 1 2 )2:
x x
x x
x x
(3:3)
x x
d
Quando = 0, verica-se que nos pontos de equilbrio
colineares L i = 1 ::: 6 vale (ver 3])
i
A=!
B=!
(L ) = 3
2 (L ) = 0
x1 x1
i
x1 x
i
107
Revista Brasileira de Ensino de Fsica, vol. 20, no. 2, junho, 1998
e
C=!
x2 x2
(L ) = 0
i
consequentememte as razes caractersticas de (3.3) s~ao
t1 2 = 0 t3 = i e t4 = ;i. Portanto, os pontos de
equilbrio colineares correspondem a centro parabolica
do sistema hamiltoniano (3.2) quando = 0 (ver gura
3.1).
Figura 3.2. Sela complexa.
Para os pontos de equilbrio triangulares L i = 5 6
verica-se que (ver 3])
i
B=!
Figura 3.1. Centro parab
olico.
Para 2 (0 1=2], sabemos que nos pontos de
equilbrio colineares vericam-se as seguintes relac~oes
(ver 3])
A=!
x1 x1
B!
x1 x2
(L ) > 0
i
(L ) = 0
i
e
C=!
x2 x2
(L ) < 0:
i
Ent~ao as razes da equac~ao caracterstica (3.3) s~ao duas
reais, t1 , t2 e duas imaginarias, t3, t4 (ver gura 3.2).
Portanto, os pontos de equilbrio colineares correspondem a sela centro do sistema hamiltoniano (3.2).
x1 x2
(L ) = 0
i
e
4;!
x1 x1
(L ) ; !
i
x2 x2
(L ) = 1
i
Portanto, o polin^omio caracterstico (3.3) adquire a
seguinte forma
P (T) = t4 + t2 + c
onde
= AC = !
x1 x1
! 2 2 > 0:
x x
(3:5)
Quando = 0, verica-se que A = ! 1 1 = 0 (ver
3]) e, portanto, = 0, consequentemente temos que
t1 = t2 = 0, t3 = i e t4 = ;i, isto e, os pontos
de equilbrio triangulares s~ao centros parabolicos (ver
gura 3.1).
Para 2 (0 1=2] conforme estudo feito em 3] existe 0 > 0 tal que para 0 < < 0 , as raizes caractersticas de (3.3) s~ao t1 = ;t2 e t3 = ;t4 s~ao imaginarios puros (ver gura 3.3). Consequentemente os
pontos de equilbrio triangulares s~ao centros genericos.
x x
108
Dante Leal Maranh~ao
Figura 3.5. Sela complexa.
Figura 3.3. Centro gen
erico.
Quando 0 < 1=2, verica-se que t1 = a + bi
t2 = a ; bi t3 = ;a ; bi, t4 = ;a + bi. (ver gura 3.5)
e, portanto, temos sela complexa.
4. Conclus~ao
p
Quando p
= 0, verica-se que t1 = t3 = i 2=2,
t2 = T4 = ;i 2=2: Portanto os pontos de equilbrio
triangulares s~ao centros degenerados (ver gura 3.4).
Uma quest~ao de grande import^ancia relacionada
com o problema e o estudo da estabilidade ou instabilidade das soluc~oes de equilbrio L i = 1 ::: 6:
Se, ao tentar colocar o corpo de massa innitesimal
m3 com velocidade relativa nula no ponto L e n~ao conseguirmos, em virtude de uma pequena velocidade inicial ou de um pequeno desvio do ponto L e mesmo assim o movimento resultante da massa innitesimal m3
permanece proximo do ponto L , para todo o tempo,
diremos que esta soluc~ao de equilbrio e estavel. Diremos que uma soluc~ao de equilbrio e instavel quando
n~ao e estavel.
Consideremos um sistema de equac~oes diferenciais
lineares
i
i
i
i
X_ = AX
X = (x1 ::: x )
n
(4:1)
e suponhamos que a matriz A tenha autovalores distintos 1 ::: . Ent~ao, uma soluc~ao (de equilbrio de (4.1)
e estavel se, e somente se, os autovalores 1 ::: s~ao
todos imaginarios puros (ver 6]).
Conforme estudo feito em 6] verica-se que a estabilidade da soluc~ao de equilbrio do sistema linearizado
n~ao assegura a estabilidade para o sistema n~ao-linear.
n
n
Figura 3.4. Centro degenerado.
Revista Brasileira de Ensino de Fsica, vol. 20, no. 2, junho, 1998
Para estudar a estabilidade das soluc~oes de
equilbrio L , utilizaremos o seguinte criterio estabelecido por Liapunov (ver 6]).
Se uma posic~ao de equilbrio L e estavel, ent~ao os
autovalores da parte linear do sistema s~ao todos imaginarios puros. Portanto se existe um autovalor com
parte real diferente de zero, a posic~ao de equilbrio e
instavel.
Como consequ^encia do exposto acima podemos concluir que:
i
i
109
6 C. L. Siegel e J. K. Moser, Lecture on Celestial
Mechanics, Springer-Verlag, Berlin, 1971.
7 V. Szebehely, Theory of Orbits, Academic Press,
New York, 1967.
Notas bibliogracas do autor (falecido apos submiss~ao do artigo)
(a) Para = 0 todas as soluc~oes de equilbrio s~ao
estaveis
(b) Para 2 (0 1=2] as soluc~oes de equilbrio colineares s~ao instaveis para o sistema linear e
consequentemente instaveis quando vistas como
soluc~oes de (3.2).
(c) Para 2 (0 0] temos a estabilidade das soluc~oes
de equilbrio triangulares para o sistema linear.
(d) Quando 0 2 ( 0 1=2] temos que as soluc~oes de
equilbrio triangulares s~ao instaveis, tanto para o
sistema linearizado quanto para o sistema original,
uma vez que existem autovalores da parte linear
do sistema que n~ao s~ao imaginarios puros.
Agradecimento: Gostaria de agradecer a Jose Adonai
e a Francisco Vieira Barros, pelas estimulantes conversas que mantivemos a respeito deste trabalho.
Refer^encias
1 M. Kline, Mathematical Thought from Ancient
to Modern Times, Oxford University Press, New
York, 1972.
2 A. Koestler, The Sleepwalkers, a History of Man's
Changing Vision of the Universe, Grosset and
Dunlap, New York, 1963.
3 D.L. Maranh~ao, Estudi del ux d'un problema restringit de quatre cossos, Tese de Doutorado, Universitat Autonoma de Barcelona, 1995.
4 F.R. Moulton, On a class of particular solutions
of the problem of four bodies, Amer. J. of Math.
1, 17 (1900).
5 A.E. Roy, Orbital motion, Adam Hilger Ltd, Bristol, 1978.
Dante nasceu em 31 de Maio de 1958 (Vic^encia,
PE), ultimo rebento de uma famlia numerosa. Concluda a escolaridade de 1o. e 2o. Graus (em TimbaubaPE e Jo~ao Pessoa-PB), cursou a graduac~ao de
Matematica em Campina Grande-PB (1980). No ano
seguinte, ocorreram dois fatos marcantes: seu ingresso
no Mestrado em Matematica (UFPE) e seu casamento
com Joluilda.
Em 1983, Dante e aprovado em concurso publico
do Departamento de Matematica Basica da Universidade Federal de Alagoas - e inicia sua carreira docente,
aqui em Maceio. Dois anos depois, sob a orientaca~o de
Hildeberto Cabral defende sua Tese de Mestrado (Estabilidade de O rbitas em Torno de um Planeta Oblato),
epoca em que nasceu o primog^enito (Luis Henrique) do
casal.
Na UFAL, participou intensamente das atividades
administrativas e acad^emicas do Departamento, atuando tambem no Movimento Docente nessa epoca, foi
Coordenador do Curso de Matematica (1985), Diretor
da ADUFAL (1987-99, \Caminho...Caminhando...") e
Diretor da CUT-AL (1988-90).
110
Possuidor de notavel coer^encia poltica, fruto de
uma milit^ancia apaixonada pelo Partido dos Trabalhadores, Dante consolidava uma posic~ao de respeito
e amizade junto a comunidade universitaria buscando
a unidade na diverg^encia dos matizes e o avanco nas
quest~oes (mais ou menos) consensuais.
Alem do domnio tecnico-matematico e da autenticidade poltica, Dante cultivava outra paix~ao artstica:
a Musica. Nos momentos de descontrac~ao, empunhava
seu viol~ao e vibrava com as paginas do cancioneiro regional.
Apos o nascimento de Gabriela (1989), Dante iniciou os preparativos para realizar seu programa de
Doutorado em 1991, partiu para a Espanha, matriculado na Universidade Aut^onoma de Barcelona, tendo
Jaume Llibre como orientador. Ao tempo em que cuidava de sua Tese de Doutorado, Estudi del Flux d'un
Problema Restringit de Quatre Cossos (1995), Dante
dinamizou a APEC-Associac~ao dos Pesquisadores e Estudantes em Catalunha (da qual foi presidente) e organizou um quarteto musical - Roendo Unha -, muito bem
Dante Leal Maranh~ao
aceito naquela universidade.
Ja de volta ao nosso convvio, Dante retomou, com
grande vigor, os trabalhos acad^emicos e polticos: membro do Conselho Cientco da FAPEAL, do Conselho
Editorial da EDUFAL, Coordenador de Curso de Especializac~ao em Matematica. Em 1996, organizou um
Encontro de Equac~oes Diferenciais e Mec^anica Celeste, cuja excelente repercuss~ao no meio acad^emicocientco, permitiu vislumbrar projetos qualitativos
mais ambiciosos, como parcerias com Departamentos
ja consolidados.
Infelizmente, os Desgnios do Altssimo interromperam a trajetoria de sua presenca. A nos todos,
seus amigos e colegas, que tivemos o privilegio de sua
conviv^encia, cabe o empenho de resgatar seus compromissos com a Ci^encia e a Cidadania, na busca da melhoria das condic~oes de vida de todos os trabalhadores.
Antonio Carlos Marques da Silva
Maceio, Outubro de 1997