Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
54
CAPÍTULO 5
CINEMÁTICA DA VELOCIDADE E DA ACELERAÇÃO
O JACOBIANO DO MANIPULADOR
5.1 INTRODUÇÃO
Nos capítulos anteriores foram estudadas as cinemáticas direta e inversa da posição. Para o
estudo das cinemáticas direta e inversa da velocidade e da aceleração, há necessidade de estudar certas
propriedades das matrizes de rotação, as quais serão úteis no estudo das transformações de velocidades
e acelerações entre sistemas de coordenadas.
No presente capítulo serão apresentadas as citadas propriedades e deduzidas as relações entre as
velocidades lineares e angulares do órgão terminal (ou de qualquer outro ponto do manipulador) e as
velocidades das juntas. Também serão discutidas a relação entre as acelerações das juntas e do órgão
terminal (ou de qualquer outro ponto do manipulador).
5.2 PROPRIEDADES DAS MATRIZES DE ROTAÇÃO
Considere-se uma matriz de rotação variante no tempo R = R(t). Tendo em vista a
ortogonalidade de R, pode-se escrever
Derivando em relação ao tempo:
(5.2.1)
Definindo
(5.2.2)
pode-se verificar facilmente que a matriz S é anti-simétrica, pois
(5.2.3)
Pósmultiplicando a eq. (5.2.3) por R(t), e levando em conta as eqs. (5.2.1) e (5.2.2), chega-se a
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
55
(5.2.4)
que permite expressar a derivada temporal da matriz de rotação em função dela mesma e da matriz antisimétrica S(t).
Essa matriz anti-simétrica S(t) tem uma interpretação física interessante. Considere-se um vetor
constante p’ e o vetor função do tempo p(t) = R(t) p’. Derivando em relação ao tempo o vetor p(t):
ou, tendo em vista a eq. (5.2.4):
Denotando o vetor velocidade angular instantânea do sistema R(t) com relação ao sistema inercial por
ω(t), sabe-se da mecânica que
Portanto, observando as duas últimas equações, verifica-se que a matriz S(t) descreve o produto
matricial entre o vetor ω(t) e o vetor R(t)p’. A matriz S(t) representa o vetor ω(t) = [ωx ωy ωz]T na
forma
(5.2.5)
o que justifica que S(t) = S(ω
ω(t)). No importante caso particular dos vetores unitários i, j e k, tem-se
0
S( i ) = 0
0
0
S( j) = 0
-1
0 0
0 -1
1 0
0 1
0 0
0 0
0 -1 0
S( k) = 1 0 0
0 0 0
(5.2.6)
(5.2.7)
(5.2.8)
Também pode-se provar que, se R é uma matriz de rotação, então
(5.2.9)
expressão que será muito útil mais tarde.
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
56
Propriedades da matriz S
A matriz S apresenta algumas propriedades interessantes que estão relacionadas a seguir, sem
provas, embora as mesmas não sejam difíceis.
(1) Linearidade
S(αa + βb) = αS(a) + βS(b)
(5.2.10)
onde α e β são escalares e a e b são vetores.
(2) Para qualquer vetor p
S(a) p = a x p
(5.2.11)
isto é, o produto matricial da matriz anti-simétrica associada ao vetor a, S(a), pelo vetor p, é igual ao
produto vetorial do vetor a pelo vetor p.
(3) Seja a matriz ortogonal 3 x 3 R e sejam a e b dois vetores no espaço 3D. Então
R(a x b) = R a x R b
(5.2.12)
ou seja, se primeiro forem girados a e b usando a matriz de transformação R e depois formado o
produto vetorial dos vetores girados R a e R b, o resultado é o mesmo que o obtido primeiro formando
o produto vetorial a x b e depois girando o vetor produto.
(4)
R S(a) RT = S(R a)
(5.2.13)
(5) Se R = R(θ) é uma matriz de rotação função apenas da variável θ, então
dR
= S R (θ )
dθ
(5.2.14)
5.3 VELOCIDADE E ACELERAÇÃO
Seja R(t) uma matriz de rotação ortogonal 3 x 3, dependente do tempo. De acordo com a eq.
(5.2.4) e com a justificativa de que S(t) = S(ω
ω(t)), conforme visto no item 5.2, pode-se escrever
.
R = S(ω (t)) R (t)
(5.3.1)
Velocidade
Considere-se, inicialmente, o caso da rotação pura. Seja um vetor p1, definido no sistema móvel
O1x1y1z1, o qual gira em relação ao sistema fixo O0x0y0z0. Então, o vetor dado é transformado para o
sistema fixo através da relação
p0 = R(t) p1
(5.3.2)
Para achar a velocidade em relação ao sistema fixo, basta derivar a eq. (5.3.2) em relação ao tempo:
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
57
(5.3.3)
que é a familiar expressão da velocidade no caso da rotação pura.
Seja, agora, o caso geral de translação e rotação. Nesse caso, a matriz de transformação
homogênea é dada por
R1 (t) d1 (t)
1
0
0
(5.3.4)
H 0 (t) =
1
O
Por simplicidade, serão omitidos o argumento t e os superescritos e subescritos que aparecem na matriz
e no vetor da expressão acima. Assim, o vetor posição, em relação ao sistema da base, é dado por
p0 = d + R p1
(5.3.5)
Derivando em relação ao tempo, obtem-se o vetor velocidade:
(5.3.6)
.
onde foi usada a eq. (5.3.1) e adotada a notação d = v .
Na eq. (5.3.6):
v é a velocidade linear da origem do sistema móvel em relação ao sistema fixo;
ω é a velocidade angular do sistema móvel em relação ao sistema fixo;
r = R p1 é o vetor posição p1 em relação ao sistema fixo.
Se o vetor p1 estiver se movimentando em relação ao sistema móvel, então deve-se adicionar ao
termo v o termo
.
R (t) p1
que é a taxa de variação de p1 expressa no sistema O0x0y0z0.
Aceleração
A eq. (5.3.6) pode ser colocada na forma
(5.3.7)
Derivando em relação ao tempo:
(5.3.8)
A eq. (5.3.8) pode ser escrita como
(5.3.9)
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
58
onde a é a aceleração linear. O termo ω x (ω
ω x r) denomina-se aceleração centrípeta da partícula e
está sempre dirigido para o eixo de rotação, sendo perpendicular a esse eixo. O termo
é chamado
aceleração transversal.
Se o vetor p1 estiver variando com relação ao sistema móvel, a expressão (5.3.9) deve ser
modificada para
(5.3.10)
onde
O termo
é conhecido como aceleração de Coriolis.
5.4 ADIÇÃO DE VELOCIDADES ANGULARES
Muitas vezes tem-se interesse em achar a velocidade angular resultante devida à rotação relativa
de vários sistemas de coordenadas. Considere-se, inicialmente, a composição das velocidades angulares
de apenas dois sistemas de coordenadas móveis, O1x1y1z1 e O2x2y2z2, em relação a um sistema fixo
O0x0y0z0. Seja um ponto p representado nos respectivos sistemas pelas relações
(5.4.1)
onde
(5.4.2)
e
(5.4.3)
Derivando a eq. (5.4.2) em relação ao tempo:
(5.4.4)
O termo
da expressão acima pode ser escrito como
(5.4.5)
O primeiro termo do lado direito da eq. (5.4.4) é simplesmente
(5.4.6)
Quanto ao segundo termo do lado direito da eq. (5.4.4), usando a eq. (5.2.12), obtem-se
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
59
(5.4.7)
Combinando as expressões acima
(5.4.8)
Tendo em vista que S(a) + S(b) = S(a + b), vê-se então que
(5.4.9)
Em outras palavras, as velocidades angulares podem ser somadas, desde que estejam expressas em
relação ao mesmo sistema de coordenadas, no caso o sistema O0x0y0z0.
A expressão (5.4.9) pode ser extendida para qualquer número de sistemas de coordenadas:
(5.4.10)
5.5 O JACOBIANO DO MANIPULADOR
Matematicamente, as equações da cinemática direta definem uma função entre o espaço das
posições e orientações cartesianas (ou, simplesmente, o espaço cartesiano) e o espaço das posições das
juntas (ou, simplesmente, o espaço das juntas). As relações entre velocidades são, então, determinadas
pelo Jacobiano dessa função. O Jacobiano é uma função matricial, podendo ser imaginado como uma
versão vetorial da derivada ordinária de uma função escalar. Trata-se de uma das quantidades mais
importantes na análise e no controle do movimento de um robô. Ele aparece em basicamente todos os
aspectos da manipulação de um robô: no planejamento e execução de trajetórias, na determinação de
configurações singulares, na dedução das equações dinâmicas do movimento e na transformação de
forças e torques do órgão terminal para as juntas do manipulador.
Para um manipulador com n membros, deve-se deduzir o Jacobiano que representa a
transformação instantânea entre o vetor das velocidades das juntas (n componentes) e o vetor das
velocidades lineares e angulares do órgão terminal (6 componentes, sendo 3 velocidades lineares e 3
velocidades angulares), ou de qualquer outro ponto do manipulador. Portanto, o Jacobiano é uma
matriz de dimensões 6 x n.
Considere-se um manipulador com n variáveis das juntas, representadas pelo vetor q =[q1 q2 ...
qn]T e seja a transformação do sistema do órgão terminal em relação ao sistema da base dada por
(5.5.1)
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
60
À medida que o robô se movimenta, tanto as variáveis das juntas, qi, como a posição d0n e a
orientação do órgão terminal, R0n, serão funções do tempo. O objetivo agora é relacionar as
.
velocidades linear e angular do órgão terminal com o vetor das velocidades das juntas, q (t) .
Seja a velocidade angular do órgão terminal definida por
(5.5.2)
e seja a velocidade linear do órgão terminal denotada por
(5.5.3)
Deseja-se obter expressões das formas
(5.5.4)
(5.5.5)
onde Jv e Jω são matrizes 3 x n. Pode-se reunir as duas últimas equações como
(5.5.6)
onde a matriz dada por
(5.5.7)
é o conhecido Jacobiano do Manipulador, uma matriz 6 x n, onde n é o número de membros do
manipulador.
5.6 DEDUÇÃO DO JACOBIANO
Inicialmente, será determinada a parte inferior do Jacobiano da eq. (5.5.7), Jω , referente à
velocidade angular. Conforme estudado anteriormente, as velocidades angulares podem ser somadas
vetorialmente, desde que estejam expressas em relação a um mesmo sistema de coordenadas. Assim,
pode-se determinar a velocidade angular do órgão terminal, em relação à base, expressando a
velocidade angular de cada membro em relação à base e somando vetorialmente essas velocidades.
Logo, a velocidade angular do i-ésimo membro, se a junta for rotativa, em relação ao sistema i - 1, é
dada por
(5.6.1)
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
61
Por outro lado, se a junta for prismática, então tal velocidade angular é nula:
(5.6.2)
Portanto, a velocidade angular total do órgão terminal, em relação ao sistema da base, é dada por
(5.6.3)
onde
(5.6.4)
denota o vetor unitário k do sistema i - 1 expresso em relação ao sistema da base e onde
ρi = 1 se a junta i é rotativa
ρi = 0 se a junta i é prismática
Assim, a metade inferior do Jacobiano da eq. (5.5.7) é dada por
(5.6.5)
Será, agora, determinada a parte superior do Jacobiano da eq. (5.5.7), Jv, referente à
velocidade linear. A velocidade linear do órgão terminal pode ser obtida a partir da derivação temporal
do vetor posição, usando a regra da cadeia da derivação:
(5.6.6)
Assim, vê-se que a i-ésima coluna de Jv é simplesmente
Além disso, essa expressão é justamente a velocidade linear do órgão terminal que resulta se
.
.
q i for igual a 1 e os outros q j forem nulos. Em outras palavras, a i-ésima coluna do Jacobiano é gerada
mantendo-se todas as juntas fixas exceto a i-ésima, que é atuada com velocidade unitária. Dois casos
são considerados a seguir.
Caso 1
Se a junta i é prismática, então R0j-1 é independente de qi = di para todo j, e
(5.6.7)
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
62
Se todas as juntas forem fixadas, exceto a i-ésima, tem-se
(5.6.8)
Assim,
(5.6.9)
Caso 2
Se a junta i é rotativa, então ok denota o vetor dk0 da origem O0 à origem Ok para qualquer k, e podese então escrever
(5.6.10)
(5.6.11)
ou, na nova notação:
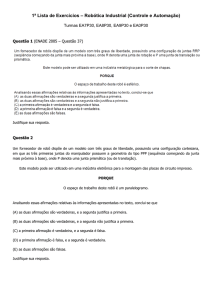
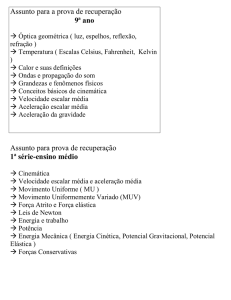
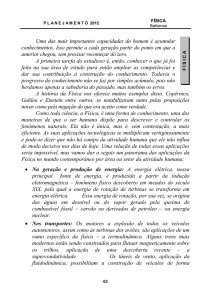
Com relação à fig. 5.1, que ilustra o movimento do órgão terminal devido ao membro i, observe-se que
tanto di-10 como Ri-10 são constantes se apenas a i-ésima junta for atuada.
Fig. 5.1 Movimento do órgão terminal devido ao i-ésimo membro
Portanto, da eq. (5.6.10):
(5.6.12)
Tendo em conta que o movimento do membro i é uma rotação qi em torno de zi-1, tem-se
(5.6.13)
e assim
Portanto,
(5.6.14)
(5.6.15)
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
63
e a parte superior do Jacobiano, Jv é
(5.6.16)
onde a i-ésima coluna é
(5.6.17)
se a junta for rotativa e
(5.6.18)
se a junta for prismática.
Reunindo as metades superior e inferior do Jacobiano, foi mostrado que o Jacobiano para um
manipulador de n membros tem a forma
(5.6.19)
onde a iésima coluna é dada por
(5.6.20)
se a junta i for rotativa e
(5.6.21)
se a junta i for prismática.
As fórmulas acima tornam simples a determinação do Jacobiano de qualquer manipulador, pois
todas as quantidades necessárias já estão disponíveis a partir da cinemática direta. Na verdade, as únicas
quantidades necessárias para calcular o Jacobiano são os vetores unitários zi e os vetores que localizam
as origens O1, O2, ... , On, em relação à origem O0. Ora, é fácil verificar que zi é dado pelos três
primeiros elementos da terceira coluna da matriz Hi0, enquanto que oi é dado pelos três primeiros
elementos da quarta coluna de Hi0. Portanto, apenas as terceira e quarta colunas das matrizes de
transformação homogênea são necessárias para a construção do Jacobiano.
O procedimento acima funciona não apenas para calcular a velocidade do órgão terminal, mas
também para determinar a velocidade de qualquer ponto do manipulador. Isso será muito importante
para a determinação das velocidades dos centros de massa dos vários membros do manipulador, a fim
de deduzir as equações dinâmicas do movimento, conforme será estudado em capítulo posterior.
Exemplo ilustrativo
Considere-se o manipulador planar da fig. 1.15. Como ambas as juntas são rotativas, o Jacobiano (que
neste caso é uma matriz 6 x 2) tem a forma
(5.6.22)
onde vê-se facilmente que as várias quantidades que aparecem na expressão acima são dadas por
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
64
(5.6.23)
(5.6.24)
Executando os cálculos:
(5.6.25)
A expressão do Jacobiano dada acima é praticamente a mesma obtida no cap. 1 (ver eq. (1.7.9).
Também é interessante observar que as duas primeiras linhas da eq. (5.6.25) fornecem a velocidade
linear da origem O2 relativamente à base. A terceira linha é a velocidade linear na direção z0 que, no
presente caso, é zero. As três últimas linhas representam a velocidade angular do último sistema, que é
simplesmente uma rotação em torno do eixo horizontal, cuja velocidade é
5.7 SINGULARIDADES
.
O Jacobiano 6 x n, J(q), define uma relação linear entre o vetor das velocidades das juntas, q , e
o vetor das velocidades do órgão terminal,
T
.
ω)
X = (v,ω
dada por
(5.7.1)
(5.7.2)
Tendo em conta que o Jacobiano é função da configuração q, as configurações para as quais
decresce a ordem de J possuem especial significado, sendo conhecidas como configurações
singulares. A identificação de configurações singulares é importante por diversas razões:
1. As singularidades representam configurações em que a mobilidade do manipulador é reduzida, isto é,
não é possível impor um movimento arbitrário ao órgão terminal;
2. Nas singularidades, pequenas velocidades do órgão terminal podem corresponder a grandes
velocidades das juntas;
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
65
3. Nas singularidades, pequenas forças e torques do órgão terminal podem corresponder a grandes
forças e torques das juntas;
4. As singularidades usualmente (mas nem sempre) correspondem a pontos do contorno do volume de
trabalho do manipulador, isto é, pontos de máximo alcance do manipulador;
5. As singularidades correspondem a pontos do volume de trabalho do manipulador que podem ser
inatingíveis sob pequenas mudanças dos parâmetros do membro (ai, di, etc.);
6. Nas proximidades das singularidades não existe uma única solução para o problema da cinemática
inversa; em tais casos, pode não haver solução ou pode haver uma infinidade de soluções.
Exemplo ilustrativo
Considere-se novamente o manipulador planar para o qual foi calculado anteriormente o Jacobiano,
dado por
Para verificar se existem singularidades, é necessário examinar se existe redução na ordem da matriz.
Como se trata de uma matriz 6 x 2, deve-se examinar todas as submatrizes quadradas 2 x 2 que nela
estão contidas. No caso, existe a submatriz 2 x 2
(5.7.3)
o que comprova que o manipulador pode apresentar singularidades. Tais singularidades podem ser
identificadas calculando-se as condições para as quais o det J é nulo, isto é:
det J = a1a2s2 = 0
Como a1 e a2 ≠ 0 (comprimentos do braço e do antebraço), então o determinante se anula quando
θ2 = 0
ou
θ2 = π
que são, respectivamente, as situações em que o órgão terminal está localizado na superfície externa do
volume de trabalho (conforme ilustra a fig. 1.19) e na superfície interna do volume de trabalho.
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
66
5.7.1 Desacoplamento de singularidades
Assim como foi feito o desacoplamento da cinemática inversa de posição da de orientação, para
o caso de punho esférico, também pode-se fazer o desacoplamento das singularidades do braço (i. é.,
dos três primeiros membros) das singularidades do punho esférico.
Considere-se que um manipulador clássico que tenha 3 GDL no braço e 3 GDL no punho
esférico. Nesse caso, o Jacobiano é uma matriz 6 x 6 e uma configuração q é singular se e somente se
(5.7.4)
Pode-se particionar o Jacobiano em blocos 3 x 3:
(5.7.5)
Logo, como as três últimas juntas são rotativas:
(5.7.6)
Tendo em vista que os eixos do punho interceptam-se em um ponto comum o, se forem
escolhidos sistemas de coordenadas tais que o3 = o4 = o5 = o6 = o, então a expressão para J0 torna-se
(5.7.7)
e a i-ésima coluna Ji de JP é
(5.7.8)
se a junta for rotativa, ou
(5.7.9)
se a junta for prismática.
Nesse caso, o Jacobiano tem a forma triangular
(5.7.10)
com determinante
(5.7.11)
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
67
onde J11 e J22 são matrizes 3 x 3. J11 tem a i-ésima coluna zi-1 x (o - oi-1) se a junta i for rotativa e zi-1 se a
junta for prismática, enquanto que
(5.7.12)
Portanto, o conjunto de configurações singulares do manipulador é a união do conjunto de
configurações do braço satisfazendo det J11 = 0 e o conjunto de configurações do punho satisfazendo
det J22 = 0. Note-se que essa forma do Jacobiano não fornece necessariamente a relação entre a
velocidade do órgão terminal e as velocidades das juntas. Ela pretende apenas simplificar a
determinação das singularidades. Serão examinadas, a seguir, as duas singularidades desacopladas.
5.7.2 Singularidades do punho
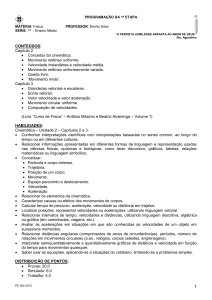
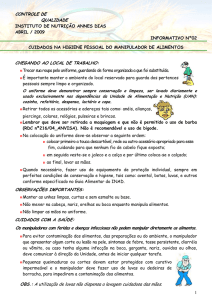
Pode-se ver facilmente, a partir da eq. (5.7.12), que um punho esférico está em uma
configuração singular sempre que os vetores z3, z4 e z5 forem linearmente dependentes. Observando a
fig. 5.2, vê-se que isso acontece quando os eixos das juntas z3 e z5 são colineares:
Fig. 5.2 Singularidade do punho esférico
De fato, sempre resulta uma singularidade quando os eixos de duas juntas rotativas forem colineares,
pois, para θ5 = 0 (situação mostrada na figura acima) e θ5 = π, uma rotação igual e oposta em torno
dos eixos não acarreta movimento líquido do órgão terminal. Essa é a única singularidade do punho
esférico, a qual é inevitável, a não ser que se imponham limites mecânicos no projeto do punho, de tal
modo que os eixos z3 e z5 não possam ficar alinhados.
5.7.3 Singularidades do braço
Para investigar as singularidades do braço, é necessário apenas calcular J11, de acordo com a eq.
(5.7.8), conforme mostra o exemplo a seguir.
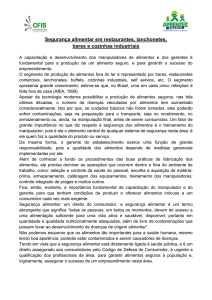
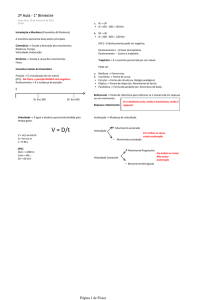
Exemplo ilustrativo: Manipulador articulado
Seja o manipulador articulado da fig. 5.3:
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
68
Fig. 5.3 Manipulador articulado
Pode-se mostrar (ver problema 5.8) que
(5.7.13)
e que o determinante de J11 é
(5.7.14)
Da eq. (5.7.14) pode-se ver que o braço estará em uma configuração singular sempre que
s3 = 0, ou seja, θ3 = 0 ou π
(5.7.15)
(5.7.16)
e sempre que
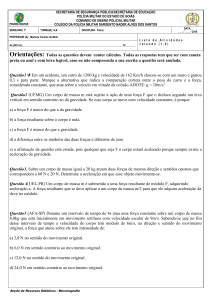
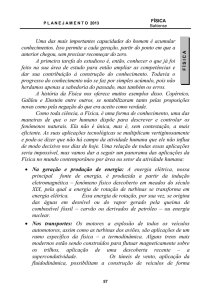
A situação da eq. (5.7.15) está mostrada na fig. 5.4 e aparece sempre que o antebraço está totalmente
distendido ou totalmente retraído:
Fig. 5.4 Singularidades do braço do manipulador articulado
A situação da eq. (5.7.16) está mostrada na fig. 5.5 e ocorre quando o centro do punho estiver sobre o
eixo z0, de modo que nesse caso haverá uma infinidade de configurações singulares e de soluções para a
cinemática inversa de posição:
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
69
Fig. 5.5 Singularidades do braço do manipulador articulado sem excentricidade
Para um manipulador articulado com excentricidade, conforme fig. 5.6, o centro do punho não
pode interceptar z0, o que vem corroborar que configurações singulares podem ser evitadas impondo-se
pequenas mudanças nos parâmetros do manipulador (nesse caso, uma excentricidade no cotovelo ou no
ombro). Essa é uma solução muito utilizada pelos fabricantes de robôs.
Fig. 5.6 Manipulador articulado com excentricidade no ombro
5.8 CINEMÁTICA INVERSA DE VELOCIDADE E DE ACELERAÇÃO
Conforme foi visto no item anterior, as velocidades das juntas estão relacionadas com as
velocidades do órgão terminal pelo Jacobiano:
(5.8.1)
logo, a solução do problema da cinemática inversa da velocidade resume-se a resolver o sistema de
equações diferenciais lineares (5.8.1), o que é conceitualmente simples.
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
70
Derivando a eq. (5.8.1) em relação ao tempo:
(5.8.2)
..
Assim, dado um vetor das acelerações do órgão terminal, X , o vetor aceleração instantânea das
juntas é dado como uma solução de
(5.8.3)
onde
(5.8.4)
Para manipuladores com 6 GDL, as equações para a cinemática inversa de velocidade e de
aceleração podem ser escritas, respectivamente, como
(5.8.5)
(5.8.6)
desde que det J(q) ≠ 0.
Obs.: Para manipuladores redundantes (aqueles que dispõem de uma quantidade de graus de
liberdade maior do que a quantidade de variáveis necessárias para cumprir uma determinada tarefa) ou
com menos do que 6 membros, o Jacobiano não pode ser invertido e, nesse caso, haverá uma solução
para as eqs. (5.8.1) ou (5.8.4) se e somente se o vetor do membro esquerdo estiver dentro da faixa de
operação do Jacobiano. Isso pode ser determinado pelo seguinte teste de ordem (rank):
Um vetor a pertence à faixa de operação de J se e somente se
(5.8.7)
Em outras palavras,, a eq. (5.8.1) (eq. (5.8.4)) pode ser resolvida para
(
) desde que o
rank da matriz aumentada [J(q) X] ([J(q) b]) seja o mesmo do Jacobiano J. Esse é um resultado da
Álgebra Linear e diversos algoritmos existem (tal como o da eliminação de Gauss) para resolver tais
sistemas de equações lineares.
Capítulo 5 - Cinemática da Velocidade e da Aceleração. O Jacobiano do Manipulador
71
PROBLEMAS
5.1 Verificar a eq. (5.2.3).
5.2 Verificar a eq. (5.2.4).
5.2 Verificar as eqs. (5.2.6) a (5.2.8).
5.3 Deduzir a eq. (5.3.10).
5.4 Considerar o manipulador de Stanford do problema 3.2. Com base na cinemática direta obtida,
detalhar o desenvolvimento do Jacobiano para esse manipulador.
5.5 Idem problema 5.4, para o manipulador SCARA do problema 3.3.
5.6 Idem problema 5.4, para o manipulador articulado MK3 do problema 3.4.
5.7 Idem problema 5.4, para o manipulador ER9 do problema 3.5.
5.8 Deduzir as eqs. (5.7.13) e (5.7.14).
5.9 Referindo-se à fig. 5.7 que mostra a singularidade do braço de um manipulador SCARA, mostrar
que a mesma ocorre quando θ2 = 0, π.