Dinâmica Topológica e Aplicações
à Teoria dos Números
Fernando Lucatelli Nunes
-
Sumário
Prefácio
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
0 Introdução
2
3
0.1
Dinâmica Topológica . . . . . . . . . . . . . . . . . . . . . . .
3
0.2
Teoria dos Números . . . . . . . . . . . . . . . . . . . . . . . .
4
0.2.1
Aproximação diofantina
. . . . . . . . . . . . . . . . .
4
0.2.2
Teoria de Ramsey . . . . . . . . . . . . . . . . . . . . .
5
1 Dinâmica Topológica
9
1.1
Linguagem Básica . . . . . . . . . . . . . . . . . . . . . . . . .
10
1.2
Homomorsmos . . . . . . . . . . . . . . . . . . . . . . . . . .
13
1.3
Minimalidade
16
. . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Recorrências
21
2.1
Conjuntos Limites . . . . . . . . . . . . . . . . . . . . . . . . .
22
2.2
Translações em Grupos . . . . . . . . . . . . . . . . . . . . . .
23
2.3
Produtos Cruzados
. . . . . . . . . . . . . . . . . . . . . . . .
26
2.4
Recorrência Múltipla . . . . . . . . . . . . . . . . . . . . . . .
28
3 Teoria do Números
3.1
3.2
Sistemas de Kronecker
35
. . . . . . . . . . . . . . . . . . . . . .
35
3.1.1
Teorema de Kronecker
. . . . . . . . . . . . . . . . . .
38
3.1.2
Teorema de Hardy e Littlewood . . . . . . . . . . . . .
40
Sistemas Dinâmicos Simbólicos
3.2.1
. . . . . . . . . . . . . . . . .
Teorema de Van der Waerden
A Transitividade Topológica
. . . . . . . . . . . . . .
45
46
51
1
2
SUMÁRIO
Prefácio
Diante da carência de textos introdutórios à dinâmica topológica em português, este texto se propõe a dar uma introdução ao assunto em nível elementar.
O grande mérito da Dinâmica topológica é a quantidade de aplicações
em diversas áreas da matemática. Então nada é mais natural do que motivar
seu estudo mediante uma dessas possíveis aplicações. Por isso, neste texto,
foram escolhidos como motivação alguns resultados em Teoria dos Números
e Combinatória.
Essas aplicações foram escolhidas por dois motivos. Um deles é a natureza elementar dos resultados a serem demonstrados, tornando assim o livro
mais acessível aos graduandos.
O outro é que as noções necessárias para
demonstrar tais resultados são razoáveis para se apresentar num primeiro
contato com a teoria.
Os pré-requisitos do assunto tratado neste texto que não são comumente
tratados num curso de graduação regular são trabalhados na referência [8].
A primeira versão deste texto foi escrita como parte do meu trabalho
de Iniciação Cientíca pela UnB, intitulada Introdução à Dinâmica Topológica e Aplicações à Teoria dos Números, no período de Agosto/2009 Agosto/2010. Essa Iniciação Cientíca recebeu apoio do CNPq e foi orientada pelo professor Mauro Moraes Alves Patrão. Para mais detalhes sobre
a iniciação, o relatório é a referência [9], disponibilizada na página do grupo
de Teoria de Lie e Aplicações, cujo endereço é
http://teoriadelie.wordpress.com/
Resolvi colocar alguns merecidos agradecimentos aqui.
Primeiramente,
agradeço às pessoas que foram determinantes para completar esse trabalho:
meus pais e minhas irmãs, pelo apoio, suporte, dedicação e incentivo durante
todos momentos e decisões.
Agradeço ao professor Mauro Patrão pela paciência e pela dedicação na
orientação durante o trabalho de Iniciação Cientíca. E aos professores que
deram momentos de conversas que causaram motivação e idéias em matemática. Em especial, ao professor Salahoddin Shokranian pela disponibilidade
para freqüência nessas conversas frutíferas.
Por m, agradeço aos amigos e colegas que me incentivaram e ajudaram
durante a realização desse trabalho.
Capítulo 0
Introdução
Nesse capítulo, o objetivo é familiarizar o leitor com o contexto onde a Dinâmica Topológica está inserida e, por m, familiarizar o leitor com a disposição
e os objetivos do texto.
0.1 Dinâmica Topológica
No sentido clássico, um sistema dinâmico é um sistema de equações diferenciais com condições sucientes impostas para assegurar continuidade e
unicidade das soluções. Dessa forma, o sistema dinâmico dene um uxo no
espaço. Desde Poincaré, muitos resultados de interesse de sistemas dinâmicos foram obtidos sem a hipótese de que esse uxo tenha vindo de equações
diferenciais. A extensão desses resultados de uxos para grupos de transformações mais gerais marcou o começo do desenvolvimento da teoria conhecida
como Dinâmica Topológica.
Desde então, a Dinâmica Topológica tomou vida e importância próprias.
Dentro dela surgiram novos problemas e questionamentos (alguns resolvidos
e outros não). Ao tomar essa vida própria, a Dinâmica Topológica ampliou
cada vez mais a sua área de aplicabilidade. Ela acabou, então, se revelando
uma ferramenta bastante útil e poderosa na investigação de problemas de
várias áreas da Matemática e, conseqüêntemente, em áreas ans.
Dentre as aplicações mais conhecidas, estão as aplicações em Análise Funcional, em Equações Diferenciais, em Topologia, em Teoria dos Números
(principalmente em Aproximação Diofantina) e em Combinatória (principalmente na Teoria de Ramsey).
3
4
CAPÍTULO 0.
INTRODUÇÃO
0.2 Teoria dos Números
Nessa subseção, serão apresentados os resultados da Teoria dos Números e
da Combinatória que serão tratados neste texto.
0.2.1
Aproximação diofantina
O problema de aproximar números reais usando números racionais é o principal ponto dos resultados diofantinos que, aqui, serão tratados. Esse assunto
é chamado de aproximação diofantina. Um dos exemplos mais simples foi
provado por Kronecker (1823-1891), referência [7].
Esses resultados de teoria dos números tem aproximadamente 100 anos,
mas as demonstrações dinâmicas usam técnicas de argumentação muito mais
recentes, desenvolvidas por Hillel Furstenberg (1935- ) , referências [3] e [4].
Lema 0.1 (Lema de Kronecker (1857))
tem
m∈Z
e
n∈N
tais que
Para todo
ε>0
m∈Z
e
n∈N
um pouco mais forte,
α ∈ R,
exis-
|nα − m| < ε.
A densidade dos racionais na reta diz que, para todo
existem
e
α
real e todo
ε > 0,
|nα − m| < nε. O resultado de Kronecker é
pois diz que esses n ∈ N e m ∈ Z podem ser escolhidos
tais que
de tal forma que
|nα − m| < ε.
Note que o lema de Kronecker implica na densidade dos racionais. Porém
não há como demonstrar o lema de Kronecker partindo apenas da densidade
dos racionais (ou seja, esses dois resultados não são equivalentes). Usando
esse primeiro resultado em aproximação diofantina, será provado um outro
teorema de Kronecker que generaliza o anterior.
Teorema 0.2 (Teorema de Kronecker (1857))
λ ∈ R.
Para todo
ε > 0,
existem
m, n ∈ Z
tais que
α ∈ (R − Q)
|nα − λ − m| < ε.
Dados
e
Segue, abaixo, um teorema devido a Hardy (1877-1947) e a Littlewood
(1885-1977).
Esse teorema é, de certa forma, uma generalização do lema
de Kronecker 0.1, pois diz que o natural multiplicando
α
pode ser escolhido
sendo quadrado perfeito. Ou seja, para todo α ∈ R e todo ε > 0, existem
m ∈ Z e n ∈ N tais que |n2 α − m| < ε. A demonstração original desse
resultado está no contexto de teoria analítica dos números.
aqui, a demonstração será puramente dinâmica.
No entanto,
0.2.
Teorema 0.3 (Hardy e Littlewood)
tem
5
TEORIA DOS NÚMEROS
k∈Z
e
n∈N
tais que
Para todo
α∈R
e todo
ε > 0,
exis-
2
|n α − m| < ε.
Um último resultado de Aproximação Diofantina que será provado no
livro é o teorema de Furstenberg. Ele implica, em particular, que poderíamos
tomar o natural
n∈N
sendo um cubo perfeito, ou coisas ainda muito mais
gerais.
Teorema 0.4 (Teorema de Furstenberg (1967))
p(0) = 0.
|p(n) − m| < ε.
mio de coecientes reais tal que
n∈N
e
m∈Z
tais que
Seja
Para qualquer
p(x) um polinôε > 0, existem
Um exemplo de aplicação do teorema de Furstenberg é tomar
p(x) = πx23 + eπ x3 .
Para qualquer
m∈Z
ε > 0,
segue do teorema de Furstenberg que existem
n∈N
e
tais que
23
πn + eπ n3 − m < ε.
Nota-se que o teorema de Furstenberg implica no teorema de Kronecker
α ∈ R, bastava tomar o polinômio p(x) = αx. E,
ε > 0, existem n ∈ N e m ∈ Z tais que |αn − m| =
0.1. Para mostrar isso, dado
então, seguiria que, dado
|p(n) − m| < ε.
Além disso, o teorema de Furstenberg implica no Teorema
p(x) = αx2 .
de Hardy Littlewood: o argumento é análogo, tomando
É possível, também, usar o resultado de Furstenberg para encontrar versões parecidas (generalizadas) do Teorema de Hardy-Littlewood. Como, por
exemplo, seguiria imediatamente do Teorema de Fursteberg que, para todo
α ∈ R,
0.2.2
todo
k∈N
e todo
ε > 0, existem n ∈ N
k
n α − m < ε.
e
m∈Z
tais que
Teoria de Ramsey
O resultado combinatório aqui trabalhado é da área chamada
Ramsey.
Teoria de
Essa teoria trabalha com a idéia de que um espaço com algum
tipo de propriedade, quando dividido em um número nito de partes, terá
ao menos um de seus pedaços ainda possuindo esta propriedade. Esse espaço pode ser um grupo, um espaço vetorial ou até mesmo grafos. Evidente
6
CAPÍTULO 0.
INTRODUÇÃO
que nem todo par espaço-propriedade satisfaz essa condição de Ramsey. Então a Teoria de Ramsey estuda os tipos de espaço-propriedade que satisfazem
essa conservação mediante partições nitas. Sob outra perspectiva, pode-se
dizer que problemas da Teoria de Ramsey trabalham com a seguinte pergunta: Dada uma estrutura com uma propriedade
X,
quantos elementos
dessa estrutura são necessários para garantir a conservação da propriedade
X ?.
Ou ainda, o quão grande deve ser a estrutura original para que, ao
ser particionado em
r
conjuntos, asseguremos que em ao menos um conjunto
desse tipo de partição esteja mantida uma dada propriedade que nos seja
interessante?.
Um exemplo de resultado elementar da Teoria de Ramsey é o conhecido
A é um conjunto com cardinan, então uma partição {Xi }i∈{1,2,3,...,n} de A em n conjuntos
ao menos um i ∈ {1, 2, 3, . . . , n}, a cardinalidade de Xi é
Princípio da Casa dos Pombos que diz que se
lidade maior que
é tal que, para
maior que
1.
A bela conexão entre a dinâmica e a teoria de Ramsey foi desenvolvida
por Furstenberg e a conexão entre a dinâmica topológica e a combinatória
foi elaborada por Furstenberg e Weiss. A Dinâmica Topológica e a Teoria
ergódica vêm sendo extensamente utilizada para demonstrar resultados em
Teoria de Ramsey.
Nesse livro, será demonstrado um dos resultados mais
famosos dessa teoria, a saber o teorema de Van der Waerden, cujo enunciado
preciso será apresentado a seguir.
Denição 0.1
de conjuntos
Seja X um conjunto. Uma partição nita de X
{C1 , . . . , Cn } que satisfaz:
• Ci ∩ Cj = ∅,
•
n
[
se
é uma família
i 6= j ;
Ci = X .
i=1
Na terminologia da combinatória, uma partição nita é denominado por uma
coloração nita. E dois elementos que pertencem a um mesmo conjunto da
partição são chamados monocromáticos.
Se o conjunto dos números naturais forem coloridos com duas cores (ou
seja, se o conjunto dos naturais for particionado por dois conjuntos), o conjunto dos números colorido com uma das cores preserva muitos padrões dos
naturais. Quando usamos um número nito de cores, isso também ocorre.
0.2.
7
TEORIA DOS NÚMEROS
Uma P.A. nita de tamanho
r+1∈N
é um conjunto do tipo
{m, m + n, . . . , m + rn} ,
onde
n∈N
e
m ∈ Z.
Segue o enunciado do Teorema de Van der Waerden,
referência [11].
Teorema 0.5 (Van der Waerden (1927))
uma partição nita, dado
r ∈ N,
Se
contém uma progressão aritmética de tamanho
nita de
Z
Z = C1 ∪ C2 ∪ · · · ∪ Cr é
j ∈ {1, 2, . . . , r}, Cj
então, para algum
r.
Ou seja, toda coloração
contém uma P.A. de tamanho arbitrário nito monocromática.
8
CAPÍTULO 0.
INTRODUÇÃO
Capítulo 1
Dinâmica Topológica
A dinâmica topológica estuda as propriedades topológicas dos sistemas dinâmicos. Em dinâmica topológica, um sistema dinâmico é um grupo topológico
agindo (continuamente) num espaço topológico. Neste texto, todos sistemas
dinâmicos têm espaço de fase compacto metrizável.
Seguem as denições
precisas.
Denição 1.1 (Sistema Dinâmico)
pacto e
onde
φ
(G, ∗) um grupo topológico.
Sejam
X
um espaço metrizável com-
Um sistema dinâmico é um par
(X, φ),
é uma aplicação contínua
φ: G×X →X
7→ g · x
(g, x)
que satisfaz as seguintes propriedades:
1. Se
e∈G
2. Dados
O espaço
X
é o elemento neutro de
g, h ∈ G
quaisquer e
G, e · x = x, ∀x ∈ X ;
x∈X
qualquer,
g · (h · x) = (g · h) · x.
é denominado o espaço de fase do sistema dinâmico; o grupo
é denominado o grupo de fase; e
φ
a projeção de fase.
Um sistema dinâmico também pode ser denotado pela tripla
pelo par
G
(X, G, φ)
ou
(X, G).
(X, G), tem-se que, para
todo g ∈ G, a aplicação g : X → X , onde g(x) = g · x, é um homeomorsmo.
Convém observar que, dado um sistema dinâmico
9
10
CAPÍTULO 1.
DINÂMICA TOPOLÓGICA
Normalmente, em dinâmica topológica, os sistemas dinâmicos têm um
dos dois grupos de fase:
Z
ou
R.
Quando o grupo de fase é
R,
o sistema di-
nâmico é denominado contínuo e ele está associado a uma equação diferencial
ordinária. Quando o grupo de fase é
Z,
o sistema dinâmico é denominado
discreto.
Nesse livro, sistemas dinâmicos discretos serão amplamente tratados.
Portanto convém fazer algumas observações mais precisas a esse respeito.
(X, Z), existe um único homeomorsmo T : X →
X tal que, para todo n ∈ Z, n · x = T n x (onde T n x é a n-ésima iterada de
T em x). Note que, para isso, basta tomar T : X → X tal que T x = 1 · x.
n
Temos que T é um homemorsmo e é fácil notar que n · x = T x. Reciprocamente, dado um homeomorsmo T : X → X , onde X é compacto metrizável,
n
é fácil denir um sistema dinâmico discreto (X, Z) fazendo n · x = T x.
Dado um sistema dinâmico
Logo, diante das observações, para sistemas dinâmicos discretos, adotase, também, a notação
homeomorsmo tal que
(X, T ), onde X é o espaço de fase
n · x = T n x (para todo n ∈ Z).
e
T :X→X
é o
1.1 Linguagem Básica
Nesta seção, apresentaremos alguns exemplos de sistemas dinâmicos, para
que possamos, motivados pelos exemplos, introduzir certas noções importantes da Dinâmica Topológica, como pontos periódicos ou xos. A noção de
órbita nos dá base para desenvolver o resto da linguagem básica dos sistemas
dinâmicos.
Denição 1.2 (Órbita de um ponto)
Dado um ponto
x ∈ X,
Seja
(X, G, φ) um sistema dinâmico.
o conjunto
G · x = {g · x : g ∈ G}
é chamado de órbita do ponto
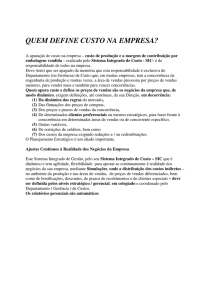
Exemplo 1.2.1
x.
S 1 = {u ∈ C : |u| = 1}. Tem-se que S 1 é compacto
1
1
πi
metrizável. Dene-se o homeomorsmo R1/2 : S → S , onde R1/2 x = e x.
1
E, então, temos o sistema dinâmico (S , R1/2 ). Tem-se que a órbita de 1 é
Z · 1 = {1, eπi }.
Seja
Esse sistema dinâmico é ilustrado na gura 1.1.
1.1.
11
LINGUAGEM BÁSICA
Figura 1.1: Sistema de rotação por
π
radianos.
O tipo mais simples de órbita é a órbita de um ponto xo.
Segue a
denição de ponto xo.
Denição 1.3 (Ponto xo)
(X, G),
x∈X
é um ponto xo do sistema dinâmico
quando sua órbita é um conjunto unitário. Ou seja,
ponto xo, quando
Exemplo 1.3.1
x ∈ X
é um
G · x = {x}.
S 1 = {u ∈ C : |u| = 1}. Fixando j ∈ S 1 , pode-se, de
1
1
maneira geral, denir o homeomorsmo Tj : S → S , Tj (x) = jx. Segue
1
que (S , Tj ) possui ponto xo se, e somente se, j = 1. E, sendo j = 1, T1 é
1
identidade e, portanto, todo ponto de (S , T1 ) é xo.
Seja
Denição 1.4 (Órbita de um conjunto)
nâmico e
U ⊂ X.
A órbita de
U
G · U = {t · x : t ∈ G
Sejam
1
Rα : S → S
1
,
um sistema di-
é o conjunto
e
x ∈ U} =
[
G·x=
x∈U
Exemplo 1.4.1
(X, G)
S 1 = {u ∈ C : |u| = 1}.
Rα x = e2πα x. E, então, temos
Seja
[
g · U.
g∈G
Dado
α ∈ (R − Q),
dene-se
1
o sistema dinâmico (S , Rα ),
que é denominado rotação irracional do círculo. Nesse tipo de sistema dinâ1
1
mico, dado um aberto U ⊂ S qualquer, veremos que Z · U = S .
Denição 1.5 (Ponto periódico)
X
Seja
(X, G)
um sistema dinâmico.
é um ponto periódico desse sistema dinâmico, se, para algum
rente do elemento neutro,
g · x = x.
g∈G
x∈
dife-
12
CAPÍTULO 1.
DINÂMICA TOPOLÓGICA
Exemplo 1.5.1
Evidente que todo ponto xo é ponto periódico. Além disso,
1
no exemplo 1.2.1, todo ponto é periódico em (S , R1/2 ).
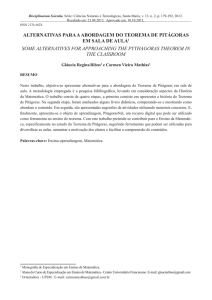
1
1
2πα
Fixado α ∈ Q, dene-se Rα : S → S , onde Rα (z) = e
z : esse sistema
dinâmico é chamado de rotação racional do círculo.Veremos, neste texto, que
1
todo ponto de (S , Rα ) é periódico.
A gura 1.2 abaixo ilustra o sistema para
α = 1/4.
Figura 1.2: Rotação racional do círculo.
Em um sistema dinâmico qualquer, evidente que, se a órbita de um ponto
é nita, então esse ponto é periódico.
Num sistema dinâmico discreto, a
recíproca é verdadeira. Segue o enunciado desse lema (e sua demonstração).
Lema 1.1
Seja
e somente se,
x
cardinalidade de
Prova:
(X, Z)
um sistema dinâmico. Dado
é periódico. No caso em que
Z·x
de periodo de
x
x ∈ X, Z · x
é nita se,
é periódico, denomina-se a
x.
(X, Z) um sistema dinâmico. Se x ∈ X é periódico,
segue que existe n ∈ Z − {0} tal que n · x = x. Tem-se, então, que −n é tal
que −n · x = x, anal, −n · x = −n · (n · x) = (−n + n) · x = 0 · x = x. Logo
podemos supor, sem perda de generalidade, que n > 0.
Provemos que, dado m ∈ Z, m · x = m(mod n) · x. Com efeito, dado
l = m(mod n), segue que m − l = kn (para algum k ∈ Z ). Logo (m − l) · x =
(kn) · x = x e, portanto, l · x = l · ((m − l) · x) = m · x. Isso completa a prova
de que m · x = m(mod n) · x.
Com efeito, seja
1.2.
13
HOMOMORFISMOS
Provou-se, então, que a cardinalidade de
Z·x
é menor ou igual a
n.
1.2 Homomorsmos
Um ponto importante no estudo de Sistemas Dinâmicos é a construção de
novos sistemas dinâmicos partindo de outros. Um dos meios mais elementares
de construir um sistema dinâmico é o sistema dinâmico produto.
Denição 1.6 (Sistema dinâmico produto)
Sejam
(X, G)
temas dinâmicos. Dene-se o sistema dinâmico produto como
Y, G),
g · (x, y) = (g · x, g · y). Note
anal, como X, Y são compacto
onde
dinâmico,
(Y, G) sissendo (X ×
e
que, de fato, isso é um sistema
metrizáveis, segue que
X ×Y
é
compacto metrizável. Além disso, é evidente que a ação é contínua e continua
satisfazendo as condições de ação.
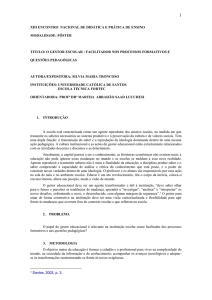
Exemplo 1.6.1
S 1 = {x ∈ C : |x| = 1}. Denem-se Id : S 1 → S 1 ,
1
1
2π 2
onde Id(x) = x, e Rπ : S → S , onde Rπ x = e
x. Então temos os dois
1
1
1
1
2
sistemas dinâmicos (S , Id) e (S , Rπ ). Tem-se que S × S = T é o toro.
Seja
Com os resultados que serão apresentados neste texto, será fácil notar que o
2
1
1
sistema dinâmico produto (T , Z) de (S , Id) e (S , Rπ ), ilustrado na gura
1.3, é tal que nenhum ponto é periódico nem xo.
Figura 1.3: Sistema dinâmico produto.
(X, G), estamos particulartopológicas de (X, T ). Após denir
Ao tratarmos aqui de um sistema dinâmico
mente interessados nas propriedades
homomorsmos entre sistemas dinâmicos, teremos o signicado preciso do
que são essas propriedades.
14
CAPÍTULO 1.
DINÂMICA TOPOLÓGICA
Denição 1.7 (Homomorsmo de sistemas dinâmicos)
Um homomor-
(X, G) e (Y, G) é uma aplicação contínua
g ∈ G e todo x ∈ X ,
smo entre dois sistemas dinâmicos
φ:X→Y
tal que, para todo
g · φ(x) = φ(g · x).
Quando
topológica.
φ:X →Y
é sobrejetivo, diz-se que
φ : X → Y é
(X, G) e (Y, H) são
E, quando o
sistemas dinâmicos
φ
é uma semi-conjugação
um homeomorsmo, diz-se que os
isomorfos. E, nesse caso, eles são
indistinguíveis em nosso estudo.
É fácil notar que isomorsmo entre sistemas dinâmicos é uma relação de
equivalência.
Exemplo 1.7.1
(X, G) e (Y, G) dois sistemas dinâmicos. Toma-se o
(X × Y, G). Segue que a projeção φ1 : X × Y → X ,
φ1 (x, y) = x, é um semi-conjugação entre (X × Y, G) e (X, G). De forma
análoga, a projeção φ2 : X ×Y → Y é uma semi-conjugação entre (X ×Y, G)
e (Y, G).
Sejam
sistema dinâmico produto
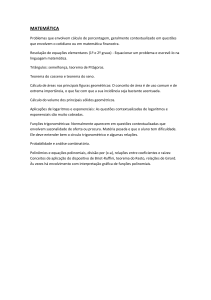
Dessa forma, dados os sistemas dinâmicos do exemplo 1.6.1, segue que
2
1
a projeção do toro no círculo φ : T → S tanto é uma semi-conjugação
2
1
entre (T , Z) e (S , Rπ ), como ilustrado na gura 1.4, quanto é uma semi2
1
conjugação entre (T , Z) e (S , Id).
Figura 1.4: Semi-conjugação projeção.
A propriedade mais simples que é preservada por isomorsmos entre sistemas dinâmicos é a de e existência de pontos xos e pontos periódicos.
1.2.
15
HOMOMORFISMOS
Proposição 1.2
Sejam
(X, G)
(Y, G)
e
é um homomorsmo entre os sistemas dinâmicos,
(X, G), então π(x) ∈ Y
π(y) é xo em (Y, G)
periódico em
segue que
Prova:
Com efeito, se
g · x = x.
x∈X
π:X→Y
segue que, se x ∈ X é
(Y, G). Se y ∈ X é xo,
sistemas dinâmicos. Se
é periódico em
é periódico, segue que existe
g ∈G
tal que
g · π(x) = π(g · x) = π(x), ou seja, π(x) é
periódico. Para provar a segunda armação, seja y ∈ X xo. Dado h ∈ G,
tem-se que h · π(y) = π(h · y) = π(y). Logo π(y) é xo em (Y, G).
Segue, então, que
As propriedades que são preservadas por isomorsmos são denominadas
propriedades topológicas dos sistemas dinâmicos.
Denição 1.8
Um sistema dinâmico discreto
dinâmico discreto
φé
(Y, S).
cação
de
(Y, S)
é um fator do sistema
(X, T ), se existe uma semi-conjugação φ : X → Y . A apli(X, T ) é uma extensão
chamada aplicação fator. Nesse caso,
A imagem inversa de cada ponto por uma aplicação fator é chamada de
{φ−1 (y) : y ∈ Y } é chamado de conjunto das bras.
bra e o conjunto
(X, T ) e (Y, S) sistemas dinâmicos discretos. A condição para que
φ : X → Y seja um homomorsmo entre os sistemas dinâmicos é apresentado
Sejam
na proposição seguinte.
Proposição 1.3
φ:X→Y
Sejam
(X, T )
e
(Y, S)
sistemas dinâmicos discretos.
Se
é uma aplicação contínua tal que
φ(T x) = S(φ(x)),
então
φ
Prova:
um homomorsmo entre
(X, T )
e
(Y, S)
Com efeito, para provar a proposição basta provar que, para todo
x ∈ X e todo n ∈ Z, S n (φ(x)) = φ(T n x). Dado x ∈ X , provemos que
S n (φ(x)) = φ(T n x) para todo n ∈ N. Para n = 1, a armação coincide com
a hipótese. Supõe-se por indução que a armação seja verdadeira para um
m. Segue que S m+1 (φ(x)) = S(S m (φ(x))) = S(φ(T m x)) = φ(T (T m x)) =
φ(T m+1 x). Isso completa a prova por indução de que S n (φ(x)) = φ(T n x)
para todo
n ∈ N.
16
CAPÍTULO 1.
DINÂMICA TOPOLÓGICA
Para completar a prova, basta provar por indução que
S −n (φ(x)) = φ(T −n x)
n ∈ N. Tem-se que, fazendo x = T y , φ(T (y)) = S(φ(y)).
y = T −1 (x), segue que
para todo
como
Portanto,
S −1 (φ(x)) = φ(y) = φ(T −1 (x)).
Logo a armação é verdadeira para
n = 1.
O resto de demonstração por
indução é análogo à indução anterior.
1.3 Minimalidade
Denição 1.9
é denominado
Seja
(X, G)
um sistema dinâmico. Um subconjunto
G-invariante,
se
Y
de
X
G·Y =Y.
(X, T ), podemos falar que Y ⊂
T (Y ) = T Y ⊂ Y e T −1 (Y ) ⊂ Y . Neste caso,
No caso de um sistema dinâmico discreto
X
é
Z-invariante
ao satisfazer
usa-se a terminologia
Exemplo 1.9.1
(X, G)
um sistema dinâmico.
Para todo
x ∈ X,
a
G-invariante. Com efeito, basta ver que, evidentemente, dados y ∈ G · x e h ∈ G, tem-se que y = g · x para algum g ∈ G.
E, portanto, h · y = h · (g · x) = (hg) · x ∈ G · x.
De forma análoga, conclui-se que, se (X, G) é um sistema dinâmico, a
órbita de qualquer subconjunto V ⊂ X é G-invariante.
órbita de
x
Seja
T -invariante.
é um subconjunto
Alguns resultados básicos sobre subconjuntos invariantes serão provados
antes de denirmos um dos principais conceitos envolvendo subconjuntos
invariantes: o de subconjunto minimal.
O fecho de um subconjunto invariante num sistema dinâmico é, ainda,
invariante.
Disso segue que o fecho da órbita de um conjunto (ou de um
ponto) é invariante. Esses resultados serão formalizados e provados abaixo.
Lema 1.4
segue que
Y
Seja
é
(X, G)
um sistema dinâmico.
G-invariante,
G-invariante.
E, para todo
G-invariante.
Em particular, para todo
Y ⊂ X, G · Y
Y ⊂ X
é
Se
é
G-invariante.
x ∈ X, G · x
é
1.3.
17
MINIMALIDADE
Prova:
Y é G-invariante, tem-se que, dado g ∈ G, g · Y ⊂ Y ,
(g · Y ) ⊂ Y . E, portanto, pela continuidade da ação,
Com efeito, se
donde segue que
g · Y ⊂ (g · Y ) ⊂ Y .
Y é G-invariante.
x ∈ X e Y ⊂ X , tem-se
G · x e G · Y são G-invariantes.
Ficou provado, então, que
Em particular, dados
G-invariantes.
Logo
que
G·x
e
G·Y
são
Se um subconjunto é invariante num sistema dinâmico, o mesmo ocorrerá
com o seu complementar. Isso é um resultado bem fácil de se deduzir que será
usado muitas vezes em demonstrações pelo texto, portanto será enunciado e
provado abaixo.
Lema 1.5
Y ⊂ X
G-invariante.
um subconjunto
C
Com efeito, prova-se por contraposição. Se Y
G-invariante, segue que existem g ∈ G e y ∈ Y C tais que
= X − Y não é
g · y ∈ Y . Logo
Sejam
G-invariante.
(X, G) um sistema
X −Y =YC
Segue que
dinâmico e
é
Prova:
segue que
Y
não é
G-invariante,
pois existe
g·y ∈Y
tal que
g −1 · (g · y) = e · y = y 6∈ Y.
Denição 1.10 (Subconjunto minimal)
mico.
M ⊂ X
Seja
(X, G)
um sistema dinâ-
é minimal se é um subconjunto não-vazio,
G-invariante,
fechado e que não contenha partes próprias não-vazias fechadas que sejam
G-invariantes.
Ou seja,
1.
M
2.
F ⊂ M , F 6= ∅, F
é fechado e
M ⊂X
é minimal, se
G-invariante;
fechado e
G-invariante =⇒ F = M .
Por sua vez, um sistema dinâmico
minimal desse sistema dinâmico.
(X, T )
é denominado minimal se
X
é
18
CAPÍTULO 1.
Exemplo 1.10.1
DINÂMICA TOPOLÓGICA
2
Rπ : S 1 → S 1 , Rπ x = e2π x. Veremos, neste
1
texto, que (S , Rπ ) é minimal. Mais geralmente, se α ∈ (R − Q), dene-se
Rα x = e2πα x. E, então, (S 1 , Rα ) é minimal.
Dene-se
É fácil vericar que a propriedade de minimalidade é um invariante por
isomorsmos em sistemas dinâmicos.
Note que um sistema dinâmico é minimal se, e somente se, a órbita de
todo ponto é densa no espaço de fase. Apesar de isso ser uma conseqüência
direta da denição, será enunciado como um lema para futuras referências.
Lema 1.6
ponto de
Prova:
X
(X, G)
X.
Um sistema dinâmico
tem órbita densa em
é minimal se, e somente se, todo
(X, G) um sistema dinâmico minimal. Se o fecho da
órbita de um ponto x de X fosse uma parte própria de X , então X não seria
minimal, pois, pelo lema 1.4, o fecho da órbita de x é G-invariante (e, no
De fato, seja
caso, obviamente, não-vazio e fechado). Logo o fecho da órbita de qualquer
X.
Reciprocamente, se X não é minimal, segue que existe uma parte própria
F de X fechada T -invariante não-vazia. Dado x ∈ F , tem-se que G · x ⊂ F
e, então, G · x ⊂ F 6= X . Isso completa a prova de recíproca.
ponto é necessariamente
Denição 1.11 (Subsistema)
(X, G) um sistema dinâmico (espaço
Y ⊂ X é fechado e G-invariante, (Y, G) é
chamado de subsistema do sistema dinâmico (X, G).
Note que, nesse caso, de fato, (Y, G) é um sistema dinâmico. Anal, é
evidente que a ação mantém suas propriedades. Além disso, Y é fechado do
compacto metrizável X e, portanto, é compacto metrizável.
Em particular, se M ⊂ X é minimal do sistema dinâmico (X, G), pode-se
tomar o subsistema (M, G).
Seja
de fase metrizável compacto). Se
Um importante teorema de caracterização de sistemas dinâmicos minimais segue abaixo.
Teorema 1.7
Seja
guintes armações:
(X, G)
um sistema dinâmico.
São equivalentes as se-
1.3.
19
MINIMALIDADE
1.
(X, G)
é um sistema dinâmico minimal;
2. Os únicos fechados
Y ⊂ X T -invariantes
3. Para todo conjunto não-vazio aberto
4. Pata todo aberto não-vazio
k
[
U ⊂ X,
são
∅
e
X;
U ⊂ X, G · U = X;
existem
g1 , . . . , g k ∈ G
tais que
gi · U = X .
i=1
Prova:
(1)=⇒(2) é óbvia. Para provar que (2)=⇒(3), dado
U ⊂X
aberto
G · U ser um aberto, o seu complementar F é
G · U é G-invariante, logo F é G-invariante. Pela
hipótese, por F ser fechado G-invariante, segue que F ou é igual a X , ou
C
é vazio. Como X − F = F
= G · U é necessariamente não vazio (pois ao
menos ∅ =
6 U ⊂ G · U ), segue que F = ∅, ou seja, G · U = X .
Para provar que (3)=⇒(4), basta ver que, dado U ⊂ X aberto não[
vazio, G · U =
g · U = X é uma cobertura aberta de X e, portanto,
e não vazio, segue que, por
um fechado. Tem-se que
g∈G
X , existe uma
k
[
que
gi · U = X .
pela compacidade de
g1 , . . . , g k ∈ G
tais
subcobertura nita, ou seja, existem
i=1
Para provar que (4)=⇒(1), faremos prova por contraposição.
provaremos que negação de (1) implica na negação de (4). Seja
minimal, segue que existe um fechado não-vazio
F 6= X . Toma-se U = X − F
que U é G-invariante. Logo
Ou seja,
(X, G)
F ⊂ X G-invariante
não
tal que
que, pela hipótese, é não-vazio. Tem-se, então,
[
g · U = U 6= X.
g∈G
Em particular,
isso quer dizer que não existe um subconjunto nito
[
g · U = X.
tal que
g⊂G
g∈g
Teorema 1.8
mal
M ⊂ X.
Todo sistema dinâmico
(X, G)
possui um subconjunto mini-
20
CAPÍTULO 1.
Prova:
DINÂMICA TOPOLÓGICA
(X, G) um sistema dinâmico. Coloquemos a ordem parcial da
inclusão na família F dos subconjuntos fechados não-vazios G-invariantes de
X . Essa família é não vazia, pois ao menos X ∈ F. Note que um subconjunto
fechado de um compacto é compacto e, portanto, todo elemento de F é
Seja
compacto.
Dada uma cadeia
K
qualquer de
F,
a interseção dos elementos de uma
subfamília nita qualquer
{B1 , . . . , Bn } ⊂ K
é igual ao menor conjunto e, portanto, é não vazia. Logo, por
família de fechados
de
\
interseção
F
X
K
ser uma
que satisfaz a propriedade de interseção nita, a
é não vazia. Note que essa interseção é uma cota inferior da
F ∈K
cadeia K . Ou seja, foi provado que conseguimos uma cota inferior para toda
F e,
M.
cadeia de
minimal
portanto, pelo lema de Zorn, temos que
F
tem um elemento
G-invariante e é não vazio, pois M ∈ F . Se
M0 ⊂ M é fechado, não-vazio e G-invariante, segue que M0 ∈ F e M0 ⊂ M ,
ou seja, M0 = M . Isso completa a prova de que M ⊂ X é um conjunto
minimal de (X, G) e, portanto, completa a demonstração do teorema.
Note que o fechado
M
é
Capítulo 2
Recorrências
Esse capítulo será dedicado a um dos conceitos mais básicos da dinâmica topológica: o de recorrência (de Poincare). Esse conceito é intimamente ligado
à noção de minimalidade. Um dos resultados mais fundamentais desse capítulo é o teorema de Birkho (resultado 2.3.1). Esse resultado será provado
logo depois de apresentado o conceito de conjunto
ω -limite.
Seguem a denição de ponto recorrente e um lema importante sobre imagem de pontos recorrentes por homomorsmos.
Denição 2.1
Seja
(X, T )
um sistema dinâmico discreto. Um ponto
diz-se recorrente se existe uma seqüência de números inteiros
nj → ∞
x∈X
tal que
nj · x → x.
e tal que
Lema 2.1
(nj )
(X, T ) e (Y, S) sistemas dinâmicos discretos. Se π : X →
Y é um homomorsmo e x ∈ X é recorrente, segue que π(x) ∈ Y é recorrente.
Prova:
Sejam
U ⊂ Y de π(x), segue que π −1 (U ) é
n
−1
uma vizinhança de x. Por x ser recorrente, Cπ −1 (U ) = {n ∈ N : T x ∈ π
(U )}
Com efeito, dada uma vizinhança
é innito.
Dado
m ∈ Cπ−1 (U ) ,
segue que
S m (π(x)) = π(T m x) ∈ U .
Isso provou que
CU = {n ∈ N : S n (π(x)) ∈ U } ⊂ Cπ−1 (U ) .
CU
(Y, S).
E, portanto,
rente em
é innito. Logo completou-se a prova de que
π(x)
é recor-
21
22
CAPÍTULO 2.
RECORRÊNCIAS
2.1 Conjuntos Limites
Num sistema dinâmico discreto minimal, provaremos que todos os pontos
são recorrentes. Note que provamos a existência de um subconjunto minimal
num sistema dinâmico, logo segue que todo sistema dinâmico discreto possui
pontos recorrentes (basta tomar um ponto do subconjunto minimal).
Antes de provar esses resultados, seguiremos denindo mais uma importante noção em Dinâmica Topológica. Essa noção é a de conjuntos limites.
(X, T ) um sistema dinâmico discreto, dado x ∈ X , dizer que y pertence
ω -limite de x signica, intuitivamente, que as iterações de x
estarão freqüentemente perto de y . As noções de conjuntos limites como
Seja
ao conjunto
serão denidas aqui são restritas a sistemas dinâmicos discretos. Portanto,
nesta seção, todos os sitemas dinâmicos serão discretos.
Denição 2.2 (Conjunto ω - limite)
(X, T ) um sistema dinâmico
discreto. Dado x ∈ X , um ponto y ∈ X é ω−limite de x, se existir uma
seqüência nk → ∞ tal que nk · x → y . Em particular, se y é ω−limite ,
tem-se que y ∈ (Z+ · x). O conjunto ω−limite de x, denotado por ω(x), é
o conjunto de todos pontos ω−limites. Note que
ω(x) =
∞
\
Seja
{t · x : t > n}.
n=1
x ∈ X é um ponto recorrente é equivalente a
dizer que x ∈ ω(x). Ou seja, se (X, T ) é um sistema dinâmico discreto, x ∈ X
é recorrente se, e somente se, x pertence ao seu próprio conjunto ω−limite.
Nesses termos, dizer que
Lema 2.2
Seja
(X, T ) um sistema dinâmico discreto. O conjunto ω−limite
x de X é não-vazio, fechado, compacto e T -invariante.
de qualquer ponto
Prova:
X é um espaço métrico compacto, segue que
toda seqüência de pontos em X possui uma subseqüência convergente, logo,
de fato, o conjunto ω−limite de qualquer ponto x ∈ X é não-vazio, pois
a seqüência (n · x) possui uma subseqüência convergente. Como o conjunto
ω−limite é uma interseção de fechados, segue que é, também, fechado. Como
ele é um fechado de um compacto, segue que o conjunto ω−limite é compacto.
Dado y ∈ ω(x), segue que existe uma seqüência (nk ) de números naturais tal que nk → +∞ e nk · x → y . Se m ∈ Z, segue que (nk + m) é um
Com efeito, como
2.2.
23
TRANSLAÇÕES EM GRUPOS
nk + m → +∞ e (nk + m) · x → m · y
(pois T é contínua). Logo m · y ∈ ω(x). Se tirarmos os termos negativos da
seqüência (nk − m), conseguimos uma seqüência (mk ) de números naturais
tal que mk → +∞ e mk · x → (−m) · y . Portanto (−m) · y ∈ ω(x) e, então,
ω(x) é T -invariante.
seqüência de números inteiros tal que
Veremos que, com o resultado 2.2, segue diretamente que todos os pontos
de um sistema dinâmico minimal discreto são recorrentes.
Proposição 2.3
se que todo ponto
Prova:
(X, T ) um sistema
x ∈ X é recorrente.
Seja
dinâmico discreto minimal. Tem-
(X, T ) é um sistema dinâmico discreto minimal.
ω(x) é um subconjunto fechado não-vazio e T invariante. Mas, como (X, T ) é minimal, segue que ω(x) = X . E, portanto,
em particular, x ∈ ω(x), donde segue que x é recorrente.
Dado
Com efeito, seja
x ∈ X,
segue que
Evidente que a recíproca da proposição 2.3 não é verdadeira: por exemplo,
é muito fácil construir sistemas dinâmicos não minimais tais que todos seus
1
pontos são todos periódicos (em particular, recorrentes).
Segue o teorema de Birkho que fala da existência de pontos recorrentes
em todo sistema dinâmico discreto.
Corolário 2.3.1 (Teorema de Birkho)
(X, T )
Todo sistema dinâmico discreto
possui um ponto recorrente.
Prova:
Dado um sistema dinâmico
(X, T ), segue pelo teorema 1.8 que existe
M ⊂X
minimal. Evidente que
M
é compacto (pois é fechado de um com-
pacto), logo podemos considerar o subsistema
(M, T )
é tal que todo
no sistema
x∈M
(M, T ).
Pela proposição 2.3,
é recorrente. Evidente que
x∈M
(X, T ).
é recorrente
2.2 Translações em Grupos
O sistema de translação em grupos compactos metrizáveis é um sistema dinâmico com propriedades bem interessantes, principalmente em relação a
1 Um exemplo já apresentado em 1.5.1 é a rotação racional do círculo.
24
CAPÍTULO 2.
RECORRÊNCIAS
recorrências. Por essas propriedades, esses sistemas dinâmicos se tornaram
muito importantes na teoria. Além de ser um sistema dinâmico muito importante e comum, esse tipo de sistema dinâmico será usado na demonstração
de um dos teoremas sobre Aproximação Diofantina.
Segue a denição de
sistema de translação.
Denição 2.3 (Sitema de Translação)
(G, ·) um grupo compacto meT : G → G, T (x) = r · x. A
aplicação T é evidentemente um homeomorsmo (por G ser um grupo topológico). T é chamada de translação e o sistema (G, T ) é chamado de
sistema dinâmico da translação por r , ou sistema de translação r .
trizável, xa-se
r ∈ G.
Seja
Dene-se, então,
Exemplo 2.3.1
1
Temos que S é um grupo metrizável compacto. Dene-se
Rα : S 1 → S 1 , Rπ x = e2πα x. Segue que (S 1 , Rα ) é um sistema de translação
2πα
por u = e
.
A proposição abaixo ilustra uma das interessantes propriedades que um
sistemas de translação tem.
Proposição 2.4
dos pontos de
Prova:
G
Seja
(G, T ) um sistema dinâmico de translação.
As órbitas
são todas homeomorfas entre si.
(G, T ) um sistema dinâmico de translação por a ∈ G. Com
n
n
efeito, dados g ∈ G, dene-se f : Z · a → Z · g , f (a ) = a g = n · g . É
−1
evidente que f é contínua e é uma bijeção. Tem-se que f
: Z·g → Z·a
−1 n
n
−1
n
, f
(a g) = (a g)g = a é contínua. Logo f é um homeomorsmo. Isso
completou a prova da proposição.
Seja
Essa proposição implica, por exemplo, que, se algum ponto num sistema
dinâmico de translação tem órbita nita, então todos os pontos desse sistema
dinâmico possuem órbitas nitas. Ou seja, segue o seguinte lema.
Lema 2.5
Seja
(G, T )
um sistema de translação por
a ∈ G.
Todo ponto de
um sistema de translação é periódico se, e somente se, algum ponto de
G
periódico.
Além dessas importantes propriedades, tem-se a seguinte propriedade.
é
2.2.
Lema 2.6
que
25
TRANSLAÇÕES EM GRUPOS
(G, T )
Seja
(G, T )
um sistema dinâmico de translação por
é minimal se, e somente se, existe um ponto de
a ∈ G.
G com
Segue
órbita
densa.
Prova:
Note que é evidente que a minimalidade implica que a órbita de
qualquer ponto de
G
é densa em
G
(segue do lema 1.6).
g ∈ G um ponto com órbita densa. Dado h ∈ G,
provemos que a órbita de h é densa. Dado r ∈ G tem-se que existe uma
seqüência de números inteiros não necessariamente distintos (nk ) tal que
nk · g → rh−1 g . Pela continuidade do produto, segue que nk · h → r. Isso
provou que a órbita de h é densa e, portanto, completa a prova de que todo
ponto de G tem órbita densa. Pelo lema 1.6, segue que (G, T ) é minimal. Reciprocamente, seja
E, por m, todo sistema dinâmico de translação é recorrente: no sentido
de que todos seus pontos são recorrentes. Esse resultado será muito importante: será usado no principal resultado sobre produtos cruzados e, também,
numa demonstração sobre aproximação diofantina.
Proposição 2.7
pontos de
G
Seja
(G, T )
um sistema de translação por
Pelo teorema de Birkho, existe um ponto z ∈
(G, T ). Segue que existe nj → ∞ tal que anj z → z . Dado
n
tinuidade do produto no grupo topológico, segue que a j g
g
Todos
são recorrentes.
Prova:
Ou seja,
a ∈ G.
é recorrente.
G recorrente em
g ∈ G, pela con= anj zz −1 g → g .
A proposição anterior poderia ter sido demonstrada sem usar o teorema
n
de Birkho. Dados a ∈ G e u ∈ G, toma-se a seqüência (a ). Temos, pela
n
compacidade de G, que existem nj → ∞ e v ∈ G tais que a j → v . Mas, sem
perda de generalidade, podemos supor que
mj = nj+1 − nj → ∞.
Portanto,
pela continuidade do produto e da inversão, tem-se que
amj u = anj+1 (anj )−1 u → vv −1 u = u.
Isso provou, então, que, num sistema de rotação por
é recorrente.
a (qualquer), todo ponto
26
CAPÍTULO 2.
RECORRÊNCIAS
2.3 Produtos Cruzados
Nesta seção, os sistemas dinâmicos são todos discretos.
Já sabemos que a
imagem de um ponto xo, periódico ou recorrente por uma semiconjugação
entre sistemas dinâmicos discretos tem a propriedade preservada. Mas nada
pode ser dito da imagem inversa.
No entanto, mediante certas condições,
esse quadro é mudado (e, então, conseguiremos mais informações usando
a semi-conjugação entre dois sistemas dinâmicos discretos). A maior parte
dessa seção dedica-se a esse mérito.
Denição 2.4
(Y, S) um sistema dinâmico discreto, G um grupo
φ : Y → G uma aplicação contínua. Dene-se o
par (X, T ), onde X = Y × G e T (y, g) = (Sy, φ(y)g). Esse par é chamado
de produto cruzado de (Y, S) via o grupo G pela aplicação φ. (X, T ) também
é chamado de produto cruzado de (Y, S) e G.
Sejam
compacto metrizável e
Se (Y, S) é um sistema dinâmico discreto, então o produto cruzado (X, T )
(Y, S) via o grupo G por uma aplicação φ é um sistema dinâmico discreto.
Além disso, (X, T ) é uma extensão de (Y, S). A proposição abaixo estabelece
de
essas armações.
Proposição 2.8
(Y, S) um sistema dinâmico discreto, G um grupo
compacto metrizável e (X, T ) um produto cruzado de (Y, S) via G. Tem-se
que (X, T ) é um sistema dinâmico e é uma extensão de (Y, S), onde
Sejam
π:X → Y
(y, g) 7→ y
é a semi-conjugação entre
Prova:
De fato,
X
(X, T )
e
(Y, S).
é produto cartesiano de dois espaços métricos compactos
e, portanto, é um espaço métrico compacto. A transformação
em cada uma de suas coordenadas e, portanto, é contínua.
T
é contínua
A aplicação
inversa é denida por
T −1 (x, h) = (S −1 x, (φ(S −1 x))−1 h)
e é evidentemente contínua (logo, de fato,
T
é um homeomorsmo).
2.3.
27
PRODUTOS CRUZADOS
(X, T ) é uma extensão. Ora, basta, então,
π : X → Y , onde π(y, g) = y é uma semi-conjugação. Isso
Resta vericar que, de fato,
vericar que
é, obviamente, uma aplicação sobrejetiva contínua (é, na verdade, a proje-
π(T (y, g)) = S (π(y, g)). Dado (y, g) ∈ X ,
S (π(y, g)) = Sy . Logo essa condição
que, de fato, π é uma semi-conjugação.
ção). Basta, então, vericar que
π(T (y, g)) = Sy .
Também ocorre que
é satisfeita, ou seja, provamos
Denição 2.5
(Y, S) um sistema dinâmico discreto, G um grupo
compacto metrizável e (X, T ) um produto cruzado de (Y, S) via G. Uma
translação à direita do produto cruzado (X, T ) por h ∈ G é uma aplicação
Rh : X → X tal que Rh (y, g) = (y, gh).
Sejam
Proposição 2.9
(Y, S) um sistema dinâmico discreto, G um grupo
(X, T ) um produto cruzado de (Y, S) via G. Então,
2
translação Rh é uma conjugação de (X, T ) nele mesmo.
Sejam
compacto metrizável e
para todo
Prova:
Rh
h ∈ G,
Rh
a
é obviamente um homeomorsmo. Resta apenas provar que
comutam. Dado
x = (y, g) ∈ X ,
T
e
tem-se que
Rh (T x) = Rh (Sy, φ(y)g)
= (Sy, φ(y)gh)
= T (y, gh)
= T Rh (y, g)
= T Rh (x)
O principal mérito desta seção é construir uma condição suciente para
(Y, S) traga informações sobre os pontos
de recorrência de sua extensão (X, T ). No caso, essa condição suciente é
(X, T ) ser um produto cruzado de (Y, S) via um grupo compacto metrizável
G. Isso é amplamente utilizado em dinâmica topológica. Em particular,
que o sistema dinâmico discreto fator
tudo feito nesta seção será importante nas demonstrações dos teoremas sobre
aproximação diofantina. Segue um resultado que torna isso mais claro.
2 Ou seja, isomorsmo de sistemas dinâmicos.
28
CAPÍTULO 2.
Teorema 2.10
RECORRÊNCIAS
(Y, S) um sistema dinâmico discreto, G um grupo
compacto metrizável e (X, T ) um produto cruzado de (Y, S) via G. y ∈ Y é
recorrente se, e somente se, (y, g) é recorrente em X para todo g ∈ G (ou
Sejam
seja, todos pontos de sua bra são recorrentes).
Prova:
(Y, S), segue do lema 2.1 que, se
π(x) é recorrente.
Reciprocamente, seja e ∈ G o elemento neutro de G. Primeiramente,
prova-se que y ∈ Y recorrente implica (y, e) ∈ X recorrente. Como y ∈ Y é
n
recorrente, segue que existe nj → ∞ tal que S j y → y . Como X é compacto,
x∈X
Como
(X, T )
é uma extensão de
recorrente, então
pode-se supor, sem perda de generalida (passando a uma subseqüência se
n
n
necessário), que (T j (y, e)) converge. Tem-se que T j (y, e) → (y, h) para
(y, h) ∈ ω(y, e).
Prova-se que Rh (ω(y, e)) ⊂ ω(y, e). Dado (z, a) ∈ ω(y, e),
m
existe mj → ∞ tal que T j (y, e) → (z, a). Logo
algum
h ∈ G.
Ou seja,
segue que
T mj (y, h) = T mj Rh (y, e)
= Rh (T mj (y, e))
→ Rh (z, a).
ω(y, e) é T -invariante, T mj (y, h) ∈ ω(y, e) para todo os índices mj .
E, por ω(y, e) ser fechado, segue que Rh (z, a) ∈ ω(y, e).
m
m+1
Logo, em particular, segue que Rh (y, h) = (y, h
) ∈ ω(y, e) para todo
m ∈ N. Pelo resultado 2.7, segue que existe sj → ∞ tal que (y, hsj ) → (y, e)
e, como ω(y, e) é fechado, isso prova que (y, e) ∈ ω(y, e), ou seja, (y, e) é
Como
recorrente.
Por
g ∈ G,
(y, e)
kj → ∞
de Rg , que
ser recorrente, existe
segue, pela continuidade
tal que
T kj (y, e) → (y, e).
Dado
T kj (y, g) = Rg (T kj (y, e)) → Rg (y, e) = (y, g),
ou seja, foi provado que
(y, g)
é recorrente.
2.4 Recorrência Múltipla
Nesta seção, recorreremos às denições e aos resultados sobre sistemas dinâmicos mais gerais. O principal objetivo dessa seção é provar o teorema 2.13
2.4.
29
RECORRÊNCIA MÚLTIPLA
.
Denição 2.6
Dados dois sistemas dinâmicos
(X, G) e (X, H) comutam entre
x ∈ X , g · (h · x) = h · (g · x).
Denição 2.7
(X, T ) é chamado de sistema
dinâmico (X, G) que comuta com
Um sistema dinâmico discreto
dinâmico homogêneo, se existe um sistema
(X, T )
(X, G) e (X, H), diz-se que
g ∈ G, todo h ∈ H e todo
si, se para todo
(X, G) é minimal.
A ⊂ X fechado é homogêneo com respeito a (X, T ), se
sistema dinâmico (X, H) que comuta com (X, T ) tal que A ⊂ X é
tal que
Um subconjunto
existe um
minimal nesse sistema dinâmico.
Lema 2.11
Sejam
(X, T )
um sistema dinâmico discreto e
A⊂X
um sub-
conjunto fechado homogêneo. Suponha que para todo ε > 0, existem x, y ∈ A,
n ∈ N tais que d(T n x, y) < ε. Então, para todo ε > 0, existem z ∈ A e m ∈ N
m
tais que d(T z, z) < ε.
Um conjunto
A⊂X
satisfazendo a hipótese é denominado conjunto ho-
mogêneo recorrente.
Prova:
Supõe-se que
(X, T )
é um sistema dinâmico e
A⊂X
é um subcon-
junto fechado homogêneo satisfazendo a hipótese. Primeiramente, provare-
ε>0
mos que para todo
d(T m u, w) < ε.
e todo
u ∈ A,
existem
w∈X
e
m∈N
tais que
ε > 0, seja (X, G) um sistema dinâmico que comuta com (X, T ) tal
A ⊂ X é minimal em (X, G). Como A é fechado, segue que é compacto
Dado
que
e, portanto, é totalmente limitado. Disso segue que existe uma cobertura de
n
[
A
por bolas abertas
A =
Bi
de raios menores que
ε/4.
Por
(A, G)
nito
Fi ⊂ G
ser
i=1
minimal, para cada
i ∈ {1, . . . , n} , existe um conjunto
[
g −1 · Bi = A.
tal que
g∈Fi
Denota-se
F :=
n
[
Fi .
Evidente que
F
é nito, então denotam-se
F =
i=1
{g1 , . . . , gN }
e
IN := {1, . . . , N }.
Dados
u, v ∈ A,
tem-se que
u ∈ Bk
para
30
CAPÍTULO 2.
RECORRÊNCIAS
k ∈ {1, . . . , n} e, também, que v ∈ gj−1 · Bk para algum j ∈ IN
(gj · v) ∈ Bk e, então, d(gj · u, v) < ε/2.
Portanto míni∈IN d(gi · u, v) < ε/2 para quaisquer u, v ∈ A.
algum
. Logo
Por outro lado, pela continuidade uniforme da ação, tem-se que existe
δ>0
hipótese, existem
todo
i ∈ IN , d(gi · x, gi · y) < ε/2 , se d(x, y) < δ .
x, y ∈ A e m ∈ N tais que d(T m x, y) < δ . Portanto,
tal que, para todo
i ∈ IN
Pela
para
,
d(gi · (T m x), gi · y) = d(T m (gi · x), gi · y) < ε/2.
Temos, então, que, para todo
míni∈IN d(T
m
u ∈ A,
(gi · x), u) ≤
míni∈IN (d(T
m
(gi · x), gi · y) + d(gi · y, u))
< ε/2 + ε/2
= ε.
Ou seja, para todo ε
m
tais que d(T w, u) < ε.
> 0 e cada u ∈ A, existem m ∈ N e w := (gj · x) ∈ A
Logo a armação está provada.
Provemos a amação do Lema.
Dado
ε > 0,
denem-se duas seqüências
z0 ∈ A. Pelo que foi
d(T m1 z1 , z0 ) < ε/2.
vamente. Fixa-se
m1 ∈ N
tais que
(zn )
em
A
e
provado, tem-se que
Supõe-se, por indução, que foram tomados z0 , . . . , zl e
n
+···+nj
para todo i < j ≤ l , d(T i+1
zj , zi ) < ε/2.
i
Pela continuidade de T , existe
< l, d(T ni+1 +···+nl z, zi ) < ε/2.
(mn )
δ < ε/2
tal que, se
em
N indutiexistem z1 ∈ A e
n1 , . . . , nl
d(z, zl ) < δ ,
tais que,
para todo
Por outro lado, segue da armação provada anteriormente, que existem
n
e nl+1 ∈ N tais que d(T l+1 zl+1 , zl ) < δ < ε/2. Portanto
zl+1 ∈ A
d(T ni+1 +···+nl+1 zl+1 , zi ) < ε/2
para todo
i < l.
E, assim, cam denidas as seqüências indutivamente.
2.4.
31
RECORRÊNCIA MÚLTIPLA
X , segue que existe uma subseqüência de (zn ). Logo,
que existem zi , zj na seqüência tais que d(zi , zj ) < ε/2.
Pela compacidade de
em particular, segue
Disso segue que
d(T ni+1 +···+nj+1 zj , zj ) ≤ d(T ni+1 +···+nj+1 zj , zi ) + d(zi , zj )
≤ ε/2 + ε/2
= ε.
(X, T ) é um sistema dinâmico
discreto e A ⊂ X é um subconjunto homogêneo recorrente, então existe y ∈ A
recorrente em (X, T ). Isso é um resultado forte sobre recorrência que será
Provaremos, na proposição seguinte, que se
importante na demonstração do teorema de recorrência múltipla.
Proposição 2.12
A ⊂ X um
subconjunto fechado homogêneo de X . Se para todo ε > 0, existem x, y ∈ A
n
e n ∈ N tais que d(T x, y) < ε; então existem z ∈ A e uma seqüência de
n
inteiros nj → ∞ tal que T j z → z . Ou seja, existe um ponto recorrente
z ∈ A.
Prova:
A⊂X
Seja
Sejam
(X, G)
(X, T )
um sistema dinâmico discreto e
o sistema dinâmico que comuta com
(X, T )
e que torna
minimal. Dene-se a função
f :A → R
x 7→ infn∈N d(T n x, x).
x é recorrente se,
lema anterior, temos que infx∈A f (x) = 0.
superiormente. Anal, dados α ∈ R e
Nota-se que um ponto
e somente se,
Temos que
f
f (x) = 0.
é semicontínua
y ∈ {x ∈ A : infn∈N d(T n x, x) < α} ,
tem-se que
infn∈N d(T n y, y) = β < α.
Logo existe
d(T m y, y) <
β+α
.
2
m∈N
Pelo
tal que
32
CAPÍTULO 2.
m
Pela continuidade de T , segue que existe
). Ou seja, w ∈ B(y; δ) implica
B(T m y, α−β
2
δ > 0
RECORRÊNCIAS
T m (B(y; δ)) ⊂
tal que
β+α α−β
+
2
2
= α
d(T m w, w) ≤ d(T m y, T m w) + d(T m y, y) <
n
Logo, em particular, w ∈ {x ∈ M : infn∈N d(T x, x)
{x ∈ A : infn∈N d(T n x, x) < α} é aberto (em A).
Pela semicontinuidade superior de
em que
f
f,
< α}.
Isso provou que
segue que existe um ponto
z ∈A
é contínua.
f (z) > 0. Disso segue que existem ε > 0 e uma
U ⊂ A de z tais que f (x) > ε para todo x ∈ U . Tem-se
minimalidade de A em (X, G) que existem g1 , . . . , gk ∈ G tais que
Supõe-se por absurdo que
vizinhança aberta
pela
A=
k
[
gi−1 · U.
i=1
G, tem-se que existe δ > 0 tal que d(x, y) <
d(gi · x, gi · x) < ε para todo i ∈ {1, . . . , k}.
Tem-se que f (y) < δ para algum y ∈ A, pois infx∈A f (x) = 0. portanto
−1
m
existe m ∈ N tal que d(T y, y) < δ . Toma-se j ∈ {1, . . . , k} tal que y ∈ gj U
Pela continuidade da ação de
δ
implica
e, então, tem-se que
f (gj y) ≤ d(T m gj y, gj y) = d(gj T m y, gj y) < ε.
Absurdo, pois
gj · y ∈ U .
Logo deve-se ter que
f (z) = 0.
O teorema abaixo é um forte resultado de recorrência (múltipla) devido a
Furstenberg e Weiss. Com ele, provaremos, futuramente, uma versão dinâmica do teorema de Van der Waerden (que será tirado como conseqüência).
Teorema 2.13 (Furstenberg e Weiss)
Seja
F = {T1 , . . . , Tk }
uma famí-
lia de homeomorsmos comutativos agindo num espaço métrico compacto
Segue que existem
x∈X
e uma seqüência
n
nj → ∞
Ti j x → x, ∀i ∈ {1, . . . , k}
tais que
X.
2.4.
33
RECORRÊNCIA MÚLTIPLA
Prova:
Com efeito, prova-se por indução sobre
k.
Para
k = 1,
a armação
é o teorema 2.3.1. Supõe-se, por indução, que a armação seja verdadeira
para um
k.
Sejam
F = {T1 , . . . , Tk+1 }
uma família de homeomorsmos
X . Seja (X, G) o sistema
k+1
dinâmico gerado por esses homeomorsmos. Ou seja, (X, G) = (X, Z
)
n1
nk
tal que (n1 , . . . , nk ) · x = T
· · · T x. Toma-se um subconjunto minimal
comutativos agindo num espaço métrico compacto
(fechado) de
(X, G) Y ⊂ X .
Como
Y
é minimal em
(X, G),
em partiular,
G-invariante. E, apartir de agora, considera-se o sistema dinâmico (Y, G).
Y ⊂ X é Ti -invariante (para todo i ∈ {1, . . . , k + 1} ). Além disso,
(Y, G) comuta com (Y, Ti ) para todo i ∈ {1, . . . , k + 1}.
k+1
Sejam Y
= Y × · · · × Y e ∆ ⊂ Y k+1 a diagonal de Y k+1 . Temk+1
se que (Y
, G), onde g · (x1 , . . . , xk+1 ) = (g · x1 , . . . , g · xk+1 ), é tal que
∆ ⊂ Y k+1 é um subconjunto minimal. Pode-se, então, denir T : Y k+1 →
Y k+1 , onde T (x1 , . . . , xk+1 ) = (T1 x1 , . . . , Tk+1 xk+1 ). Segue que ∆ ⊂ Y k+1
k+1
é um subconjunto homogêneo fechado do sistema dinâmico (Y
, T ) (pois
k+1
k+1
(Y
, T ) comuta com (Y
, G)).
k+1
k+1
Prova-se que ∆ ⊂ Y
é um subconjunto fechado homogêneo de (Y
,T)
−1
que satisfaz a hipótese da proposição 2.12. Dene-se Sj = Tj Tk+1 para
j ∈ {1, . . . , k}. Segue que
{S1 , . . . , Sk }
é
Segue que
é uma família de homeomorsmos comutativos agindo no espaço métrico
compacto
Y.
Pela hipótese de indução, segue que existem
nj → ∞
e
z∈X
tais que
n
Si j z → z, ∀i ∈ {1, . . . , k} .
Logo, dado
ε > 0,
existe
m0 ∈ N
tal que
d(Si z, z) < ε, ∀i ∈ {1, . . . , k} .
Disso segue que, tomando
−m0
−m0
y = (Tk+1
z, . . . , Tk+1
z) ∈ X ,tem-se
que
d(T m0 y, z∆ ) = d ((S1 z, . . . , Sk z, z), (z, . . . , z)) < ε.
Isso completou a prova de que
∆
satisfaz a hipótese da proposição 2.12 e,
k+1
portanto, existe um ponto recorrente (w, . . . , w) ∈ ∆ de (Y
, T ). Disso
segue que existe
nj → ∞
tal que
T nj (w, . . . , w) → (w, . . . , w).
34
CAPÍTULO 2.
RECORRÊNCIAS
Mas isso implica justamente que
n
Ti j w → w, ∀i ∈ {1, . . . , k + 1} .
E isso completa a prova por indução.
Capítulo 3
Teoria do Números
Este capítulo utilizará os conceitos e resultados provados até agora para demonstrar alguns resultados de teoria dos números. A maioria dos resultados
que serão demonstrados neste capítulo são antigos, mas suas demonstrações
usando apenas dinâmica topológica são bem mais novas.
Atualmente, muitos pesquisadores usam sistemas dinâmicos (teoria ergódica) para encarar problemas atuais de combinatória e aproximação diofantina.
No entanto, as técnicas/resultados utilizados para isso estão fora do
escopo do texto. Este capítulo pretende apenas ilustrar o início dessa bonita
aplicação de Dinâmica Topológica à Teoria dos Números, com demonstrações
dinâmicas de teoremas famosos.
3.1 Sistemas de Kronecker
Esta seção será dedicada aos resultados de aproximação diofantina. Os sistemas dinâmicos estudados nesta seção são, em sua maioria, com espaços de
fase sendo grupos compactos metrizáveis. Serão, portanto, bastante utilizados resultados sobre grupos topológicos. A referência [8] apresenta todos esses
resultados sobre gupos topológicos que não estiverem explícitos no texto.
Denição 3.1 (Sistema de Kronecker)
(R, +) o grupo aditivo. Como
R é um grupo abeliano, todo subgrupo é normal. Em particular, Z é um
subgrupo normal, logo podemos considerar o grupo quociente R/Z. Por Z
ser fechado em R e por R ser um grupo metrizável, localmente compacto e
35
Seja
36
CAPÍTULO 3.
TEORIA DO NÚMEROS
separável, o grupo quociente R/Z, com a topologia quociente, é um grupo me1
n
n
trizável . Fora isso, veremos mais adiante que R /Z é, de fato, compacto e
metrizável (como conseqüências da proposição 3.1).
n
n
n
Os grupos (R/Z) , R /Z são grupos topológicos isomorfos (por isso, con
n
n
locamos a igualdade (R/Z) = R /Z ). Esse fato é conseqüência de um teorema sobre grupos topológicos: ver [8]. Portanto podemos indicar R/Z por
T e, então, Rn /Zn = (R/Z)n é denotado por Tn . Um elemento x + Z ∈ R/Z
será denotado por
que
x = x + Z.
Note que,
x=y
signica que existe
k∈Z
tal
x = k + y.
Um sistema de Kronecker é um sistema dinâmico de translação com esn
n
paço de fase R /Z .
Proposição 3.1
Sejam
S = {x ∈ C : |x| = 1}
com a operação de multipli-
cação usual dos complexos e a métrica euclidiana
Tem-se que
S
dE
e
T = R/Z.
é um subgrupo de um grupo topológico (metrizável), logo é
topológico (metrizável). Dene-se o seguinte epimorsmo:
ϕ : R → S, ϕ(x) = e2πxi = cos(2πx) + i · sen(2πx).
Nota-se que o Kernel desse epimorsmo é o conjunto
e2kπi = 1 se, e somente se, k ∈ Z).
Z
dos inteiros (pois
Então, pelo primeiro teorema de isomorsmo, o homomorsmo
φ : R/Z → S, f (x) = cos(2πx) + i · sen(2πx) = e2πxi .
é um isomorsmo. Temos que
φ,
além de ser um isomorsmo de grupos, é
um isomorsmo de grupos topológicos.
Prova:
Precisa-se provar que
lógicos. Note que
qualquer
φ
é, de fato, um isomorsmo de grupos topo-
ϕ é um homomorsmo de grupos, pois é evidente que, para
k ∈ Z,
e(2π(x+y)k)i = e(2π(x+y))i
= e(2πx)i · e(2πy)i .
É fácil ver que
ϕ
[0, 2π) e,
cos(z) + i · sen(z).
o intervalo
é sobrejetiva. Basta ver que
z = 2π · x
passa por todo
portanto, passa por todos os valores possíveis da função
1 Essa passagem é explicada na referência [8].
3.1.
37
SISTEMAS DE KRONECKER
Logo, temos que
φ, como foi denida, é, de fato, um isomorsmo de grupos
(isso é conseqüência do denominado Primeiro teorema do isomorsmo).
Por
ϕ
ser uma aplicação contínua e aberta, existe um primeiro teorema
de isomorsmo para grupos topológicos que garante que
φ é um isomorsmo
de grupos topológicos. Mas não assumiremos isso aqui (o primeiro teorema
de isomorsmo é apresentado na referência [8]).
P : R → (R/N)
2
tal que P (x) = x. Tem-se que φ é contínua se, e somente se, (φ◦P ) o é. Note
que essa função (φ ◦ P ) é evidentemente contínua. Na verdade, se t : R → C,
t(x) = 2πxi (linear, portanto contínua), segue que (φ ◦ P ) = E ◦ t (onde E é
a função exponecial nos complexos). Logo φ é contínua. De forma análoga,
−1
nota-se que φ
= P ◦ T ◦ L, onde T : C → R, T (x) = x/2πi é linear, L
Resta provar que
φ
é, de fato, um homeomorsmo. Seja
é o logaritmo nos complexos. Como todas as três funções são contíinuas, a
−1
prova de que φ
é contínua está completa.
Portanto
φ
é, de fato, um homeomorsmo.
S
são indistinguíveis no ponto
A proposição acima mostra que
R/Z
e
de vista de grupos topológicos. Esse fato faz com que possamos confundir
os dois grupos sem causar prejuízo ao rigor. Tem-se, por exemplo, que S é
2
compacto (pois é homeomorfo à circunferência de raio 1 em R ), logo também
n
n
n
é compacto R/Z. Temos, então, que (R/Z) = R /Z é o produto de espaços
compactos e, portanto, é compacto. Outra propriedade herdada para
R/Z é
o fato de ser metrizável (métrico). Com efeito, podemos induzir uma métrica
pelo isomorsmo de grupos topológicos (como será feito na denição abaixo).
n
E, então, (R/Z) também é métrico (com uma das métricas do produto
(nito)).
Denição 3.2
a métrica em
S
ser
R/Z uma métrica por φ. Ou seja, denimos
sendo: d(x, y) := dE (φ(x), φ(y)). Nota-se que, por
Induzimos em
R/Z como
metrizável, R/Z é metrizável
também (como já havíamos previsto).
A métrica induzida é equivalente a uma métrica denominada a métrica
do menor arco:
d(x, y) = min {|x − y − m| : m ∈ Z} .
2 Procurar por topologia quociente no [8].
38
CAPÍTULO 3.
TEORIA DO NÚMEROS
x, y ∈ R, a distância d(x, y) = ε signica, em particular, que
existe m ∈ Z tal que |x − y − m| = ε.
1
Dados x, y ∈ R/Z ≈ S , é fácil de vericar que d(x, y) é igual ao compri1
mento do menor arco determinado por x e y em S dividido por 2π . Ou seja,
dados x, y ∈ R, a distância d(x, y) é igual ao comprimento do arco ilustrado
Note que, se
na gura 3.1 abaixo.
Figura 3.1: Métrica do menor arco.
Quando não estiver explícito o contrário, a métrica em T será a a métrica
n
do menor arco. Fora isso, a métrica em T será a métrica do máximo em
relação à métrica do menor arco, ou seja, a métrica:
dM (x, y) = max {d(x1 , y1 ), . . . , d(xn , yn )} .
3.1.1
Teorema de Kronecker
Esta subseção será dedicada à demonstração do teorema de Kronecker sobre
apoximação diofantina (teorema 0.2). Consegue-se um resultado um pouco
mais fraco que o teorema 0.2 apenas com o resultado 2.7. Ele é chamado de
lema de Kronecker . Esse lema é conseqüência direta do fato de que todos
os pontos num sistema dinâmico de translação são recorrentes.
Com esse
lema, conseguimos toda a ferramenta necessária para demonstrar o teorema
0.2
3.1.
Lema 3.2 (Lema de Kronecker)
n∈N
e
m∈Z
Prova:
onde
39
SISTEMAS DE KRONECKER
tais que
Para todo
α∈R
e todo
ε > 0,
|nα − m| < ε.
Com efeito, toma-se o sistema dinâmico de Kronecker
T x = x + α.
(R/Z, T ),
Pelo teorema 2.7, todo ponto desse sistema dinâmico
0 ∈ (R/Z) é recorrente. Logo, dado
d do menor arco, d(nα, 0) < ε.
que |nα − m| < ε.
é recorrente.
Em particular, o ponto
ε > 0,
n∈N
existe
existem
tal que, com a métrica
Isso quer dizer que existe
m∈Z
tal
Denição 3.3 (Rotação irracional do círculo)
Kronecker, com espaço de fase
R/Z,
Um sistema dinâmico de
que é uma translação por
r,
irracional, é chamado de rotação irracional do círculo. (E, quando
onde
r
r
é
é raci-
onal, esse sistema é chamado de rotação racional).
Antes de demonstrar o teorema de Kronecker, convém fazer uma observação sobre rotações irracionais. Se
(R/Z, T ) é um sistema dinâmico de rotação
irracional do círculo, segue que não existem pontos periódicos nesse sistema
dinâmico. A demonstração desse fato é simples. Supondo por absurdo que
x ∈ R/Z
n ∈ N, n · x = x, ou
seja, existe k ∈ Z tal que x = x−k +nα. Disso segue que nα = k e, portanto,
k
α = . Absurdo, pois contraria a hipótese de α ser irracional. Na verdade,
n
é um ponto periódico, segue que, para algum
veremos que toda rotação irracional é um sistema dinâmico minimal.
Além disso, é fácil ver que todos os pontos de rotações racionais são
periódicos. Anal, um sistema de rotação por
q ·x = x para todo x ∈ R/Z.
p/q (p
e
q
inteiros) é tal que
E, então, ca fácil ver que toda rotação racional
é um exemplo de sistema dinâmico de translação não minimal.
Segue o enunciado e a demonstração do teorema de Kronecker 0.2.
Teorema 3.3 (Kronecker)
existem
Prova:
m, n ∈ Z
tais que
α ∈ (R − Q)
|nα − λ − m| < ε.
Dados
e
λ ∈ R.
Para todo
ε > 0,
α ∈ R − Q, λ ∈ R e ε > 0, toma-se o sistema
dinâmico de Kronecker (R/Z, T ), onde T x = x + α. Pelo teorema 2.7, todo
ponto desse sistema dinâmico é recorrente. Em particular, o ponto 0 ∈ R/Z
é recorrente. Logo, dado ε > 0, existe n ∈ N tal que, com a métrica d do
menor arco, d(nα, 0) < ε . E, como α ∈ R − Q, 0 ∈ (R/Z) não é periódico,
Com efeito, dados
40
CAPÍTULO 3.
TEORIA DO NÚMEROS
0 < d(nα, 0) < ε. Isso quer dizer que existe m ∈ Z tal que
0 < |nα − m| < ε. Se λ > 0 , pela propriedade arquimedianda da reta,
existe k = mín {q ∈ N : q |nα − m| ≥ λ}. Portanto k |nα − m| − λ < ε, pois,
caso contrário, (k − 1) |nα − m| > k |nα − m| − ε ≥ λ . Dependendo do sinal
de nα − m, segue que 0 ≤ knα − km − λ < ε ou 0 ≤ −knα + km − λ < ε.
Caso λ < 0, toma-se k = mín {−q ∈ N : q |nα − m| ≤ λ} e a demonstração ca análoga.
tem-se que
É fácil de perceber que o teorema de Kronecker acima implica, por exemplo, que as rotações irracionais são minimais (pois o teorema implica que a
órbita do elemento neutro de uma rotação irracional é densa).
3.1.2
Teorema de Hardy e Littlewood
Usando o teorema 2.10, será provado o teorema de Hardy e Littlewood e
um teorema que generaliza ele.
O teorema 3.7 de Furstenberg poderia ser
provado antes do teorema de Hardy e Littlewood e, então, tirar esse teorema
como corolário. O teorema de Hardy e Littlewood será demonstrado primeiro
porque ele possui uma demonstração dinâmica mais simples.
Teorema 3.4 (Hardy e Littlewood)
tem
k∈N
Prova:
e
q∈Z
tais que
Para todo
α∈R
e todo
ε > 0,
exis-
2
|k α − q| < ε.
(T, T ) o sistema dinâmico de Kronecker, onde T x = x + α. Fazse o produto cruzado de (T, T ) via T pela aplicação φ : T → T, φ(x) = 2x+α.
2
Obtém-se, assim, o sistema dinâmico (T , S), onde
Seja
S(x, y) = (x + α, 2x + α + y).
Todo ponto no sistema dinâmico de Kronecker
(T, T ) é recorrente (por ser
(T2 , S) é recorrente.
uma translação), logo, pelo teorema 2.10, todo ponto em
(0, 0) é recorrente.
n
2
que S (0, 0) = (nα, n α), ∀n ∈ N.
Em particular,
Provemos
n = 1,
para m.
Com efeito, para
a armação é verdadeira. Supõe-se, por indução, que é verdadeira
3.1.
41
SISTEMAS DE KRONECKER
Isso implica que
S m+1 (0, 0) = S(S m (0, 0))
= S(mα, m2 α)
= ((m + 1)α, 2mα + α + m2 α)
= ((m + 1)α, (m2 + 2m + 1)α)
= ((m + 1)α, (m + 1)2 α).
Ou seja, implica que a armação é verdadeira para m + 1. E, portanto,
n
2
está completa a prova por indução de que S (0, 0) = (nα, n α).
Como (0, 0) é recorrente, dado ε > 0, segue que existe k ∈ N
dM ((0, 0), (kα, k 2 α)) < ε. Isso, em particular, implica que
tal que
d(0, k 2 α) < ε.
E isso quer dizer que existe
q∈Z
tal que
|k 2 α − q| < ε.
Antes de provar o teorema 3.7 de Furstenberg, será denido um sistema
dinâmico denominado Sistema de Furstenberg. Será provado que esse sistema é recorrente (todos os pontos são recorrentes).
Denição 3.4
Para cada
Td = (R/Z)d o toro d-dimensional.
d+1
sistema (T
, Fd ), onde
d ∈ N,
Um sistema de Furstenberg é um
seja
Fd (x0 , x1 , . . . , xd ) = (x0 , x1 + x0 , . . . , xd + xd−1 ).
É interessante observar que o sistema de Furstenberg
2
na gura 3.2, é tal que, dado (z0 , z1 ) ∈ T ,
(T2 , F1 ),
ilustrado
F1n (z0 , z1 ) = (z0 , nz0 + z1 )
= (z0 , Rzn0 z1 ),
ou seja, identidade na primeira coordenada e rotação na segunda coordenada.
Será provado que todo sistema dinâmico de Furstenberg é recorrente.
1
Note que isso é fácil de vericar para o caso do sistema dinâmico (T , F0 ), pois
F0 é a aplicação identidade em R/Z ≈ S 1 . Além disso, pela observação do
42
CAPÍTULO 3.
TEORIA DO NÚMEROS
Figura 3.2: Sistema de Furstenberg para
d = 1.
parágrafo anterior, é fácil vercar que a armação é verdadeira para
(T2 , F1 )
também.
d. E, para
d
que (T , Fd−1 )
A idéia da demonstração do caso geral é fazer indução sobre
completar esse argumento de indução, será usado o fato de
d+1
é um produto cruzado de (T
, Fd ) via o grupo R/Z ≈ S 1 .
Apenas para
tornar a demonstração da proposição 3.6 mais concisa, será provado isso no
lema abaixo.
Lema 3.5
Sejam
(Td+1 , Fd )
berg, onde d ∈ N qualquer.
(Td , Fd−1 ) via R/Z.
(Td , Fd−1 ) sistemas
d+1
Segue que (T
, Fd ) é
e
dinâmicos de Furstenum produto cruzado de
Prova:
d+1
Para provar o lema, basta vericar que (T
, Fd ) é o produto crud
d
1
zado de (T , Fd−1 ) via R/Z pela aplicação contínua φ : T → S , onde
φ(z0 , . . . , zd−1 ) = zd−1 .
De fato,
Fd (z0 , . . . , zd ) = (z0 , z0 + z1 , . . . , zd−1 + zd )
= (Fd−1 (z0 , . . . , zd−1 ), zd−1 + zd )
= (Fd−1 (z0 , . . . , zd−1 ), φ(z0 , . . . , zd−1 ) + zd )
3.1.
43
SISTEMAS DE KRONECKER
Proposição 3.6
Todo sistema dinâmico de Fursteberg
(Td+1 , Fd )
é recor-
rente (ou seja, todos os pontos de um sistema de Furstenberg ão recorrentes).
Prova:
Como foi observado anteriormente, o sistema dinâmico
(Td+1 , Fd )
é
recorrente, quando d = 0 (pois, nesse caso, a aplicação F0 é a aplicação iden1
tidade em S ). Prova-se, então, por indução, que a armação é verdadeira
para qualquer
d
natural.
d
A hipótese de indução é que o sistema de Furstenberg (T , Fd−1 ) é record+1
rente. Como (T
, Fd ) é um produto cruzado de (Td , Fd−1 ) via R/Z, segue,
d+1
pelo teorema 2.10, que (T
, Fd ) é recorrente. E, portanto, isso completa a
prova por indução da proposição.
Com esse resultado que diz que todo sistema de Furstenberg é recorrente,
estamos prontos para provar o mais forte resultado de Aproximação Diofantina que será apresentado neste texto: o teorema 0.4 de Furstenberg. Seguem
o enunciado a demonstração desse teorema.
Teorema 3.7 (Teorema de Furstenberg )
coecientes reais tal que
p(0) = 0.
Então,
Seja
∀ε > 0,
p(x)
um polinômio com
existem
k ∈N
e
q ∈Z
tais que
|p(k) − q| < ε.
Prova:
p(x) um polinômio de grau d satisfazendo a hipótese.
lista de d + 1 polinômios da seguinte forma:
Com efeito, seja
Dene-se, então, uma
pd (x) := p(x)
pd−1 (x) := pd (x + 1) − pd (x)
.
.
.
p1 (x) := p2 (x + 1) − p2 (x)
p0 (x) := p1 (x + 1) − p1 (x).
É fácil vericar que o polinômio
pk (x)
dessa lista tem grau
k,
para qual-
k = 0, . . . , d. Em particular, p0 é constante (grau 0).
d+1
O toro T
é munido da métrica do máximo em relação à métrica do
menor arco em R/Z. Toma-se, então, o sistema dinâmico de Furstenberg
(Td+1 , Fd ). Verica-se que
quer
Fdn (p0 (0), . . . , pd (0)) = (p0 (n), . . . , pd (n)),
44
CAPÍTULO 3.
TEORIA DO NÚMEROS
anal, tem-se a seguinte relação de recorrência
Fd (p0 (n), . . . , pd (n)) = (p0 (n), p0 (n) + p1 (n), . . . , pd−1 (n) + pd (n))
= (p0 (n + 1), p1 (n + 1), . . . , pd (n + 1)).
Pelo resultado 3.6, tem-se que (p0 (0), . . . , pd (0)) é recorrente no sistema
d+1
dinâmico (T
, Fd ). E isso implica, em particular, que existe n ∈ N tal que a
n
distância entre (p0 (0), . . . , pd (0)) e Fd (p0 (0), . . . , pd (0)) é menor que ε. Mas,
pela métrica do máximo, isso implica que
mínm∈Z
pd (0) = 0
|p(n) − m| < ε.
E, como
e
|pd (n) − pd (0) − m| < ε.
pd (n) = p(n),
isso implica que existe
m∈Z
tal que
O teorema precedente é mais forte que o teorema de Hardy e Littlewood
(teorema 3.4), pois aquele se trata apenas de um caso particular: quando
o polinômio tem grau
2.
Note, portanto, que o teorema de Hardy pode ser
colocado como corolário do teorema precedente. Existe um outro corolário
desse teorema. Na verdade, é corolário da demonstração do teorema e está
enunciado abaixo.
Corolário 3.7.1
p1 (x), p2 (x), . . . , pk (x) polinômios tais que pj (0) = 0
para todo j ∈ {1, . . . , k}. Então, para todo ε > 0 existem inteiros n, m1 , . . . , mk ∈
Z tais que
|pj (n) − mj | < ε, ∀j ∈ {1, . . . , k} .
Prova:
Sejam
Com efeito, basta tomar o polinômio
p(x) = (p1 (x), . . . , pk (x)).
(Td+1 , Fd ) (onde d é o grau do polinôk d
mio), toma-se o sistema dinâmico ((T ) , Fd ) (onde d é o grau do polinômio
de maior grau entre p1 (x), . . . , pk (x) ). Por uma argumentação análoga, to-
Em vez de tomar o sistema dinâmico
dos os pontos desse sistema dinâmico são recorrentes. Disso e do fato de que
Fdn (p(0)) = p(n) segue a tese do corolário.
3.2.
45
SISTEMAS DINÂMICOS SIMBÓLICOS
3.2 Sistemas Dinâmicos Simbólicos
Nesta seção, trataremos de dinâmica simbólica. Será com sistemas dinâmicos simbólicos que demonstraremos o teorema de Van Der Waerden. Antes
de continuarmos, falaremos um pouco sobre o que é um sistema dinâmico
simbólico e como é seu espaço de fase.
Um alfabeto de
um alfabeto de
k
k∈N
letras é um conjunto de cardinalidade
k.
Seja
Λ
Λ ser evidenteΩ = ΛZ , munido da
letras munido da topologia discreta. Por
mente compacto, segue, pelo teorema de Tychono, que
topologia produto, é um compacto. Um ponto
x∈Ω
pode ser escrito como
uma função
x: Z →Λ
k 7→ xk
Para cada coordenada
onde
πj (x) = xj .
j ∈ Z,
tem-se a aplicação projeção
πj : Λ Z → Λ ,
A topologia produto torna todas essas aplicações contínuas,
além disso ela é menor topologia que satisfaz isso.
A topologia produto num espaço topológico
Ω = ΛZ
é caracterizada pelo
f : M → Ω é contínua se, e somente se, cada uma
(πi ◦ f ) : M → Λi é contínua. De fato, Ω é metrizável,
fato de que uma aplicação
de suas coordenadas
anal é produto enumerável de espaços metrizáveis.
Lema 3.8
Seja
Ω = ΛZ .
Se
x 6= y
d(x, y) =
e
d(x, x) = 0.
Prova:
Seja
Ω,
dene-se
1
,
1 + min {|k| : xk 6= yk }
Isso é uma métrica que induz a topologia produto em
O fato de
ρi
em
d
Ω.
ser uma métrica é de fácil vericação.
a métrica zero-um em
Λi ,
ou seja,
ρi (x, x) = 0
e
ρi (x, y) = 1,
se
x 6= y .
f : M → Ω contínua. Dada uma
que, dado ε > 0, existe δ > 0 tal que
Com efeito, supõe-se
Λi
qualquer, tem-se
projeção
1
2 |i|
=⇒ mín {|k| : f (x)k 6= f (y)k } > |i|
d(x, y) < δ =⇒ d(f (x), f (y)) <
=⇒ ρi (f (x)i , f (y)i ) = 0 < ε
πi : Ω →
46
CAPÍTULO 3.
TEORIA DO NÚMEROS
(πi ◦ f ) é contínua.
Reciprocamente, se (πi ◦ f ) é contínua para todo i ∈ Z,
ε = 1/no > 0, existem δ0 , δ1 , δ−1 , . . . , δno , δ−no > 0 tais que
Ou seja, foi provado que
segue que, dado
d(x, y) < δ0 =⇒ π0 (f (x)) = π0 (f (y))
d(x, y) < δ1 =⇒ π1 (f (x)) = π1 (f (y))
d(x, y) < δ−1 =⇒ π−1 (f (x)) = π−1 (f (y))
.
.
.
d(x, y) < δno =⇒ πno (f (x)) = πno (f (y))
d(x, y) < δ−no =⇒ π−no (f (x)) = π−no (f (y))
d(x, y) < mín {δ−n0 , δn0 , δ−n0 +1 , δn0 −1 , . . . , δ0 }
Logo
d(f (x), f (y)) <
implica
1
< 1/no = ε.
1 + |no |
Isso completa a prova da recíproca.
Note que, com a métrica denida no lema 3.8,
Denição 3.5
Seja
T : Ω → Ω, T x = y ,
d(x, y) ≤ 1, ∀x, y ∈ Ω.
onde
chamada de função-deslocamento no alfabeto
Λ,
yk = xk+1 .
ou shift no alfabeto
um homeomorsmo. Chamamos o sistema dinâmico
(de dois lados) em
Prova:
k
(Ω, T )
T
Λ. T
A aplicação
é
é
de deslocamento
símbolos (e ele é um sistema dinâmico simbólico).
T é um homeomorsmo.
i ∈ Z, tem-se que πi ◦T = πi+1 é, evidentemente, contínua. Portanto
cou provado que T é contínua. Analogamente, dado i ∈ Z, temos que
πi ◦ T −1 = πi−1 é contínua. Portanto T é homeomorsmo.
Provemos que
Dado
3.2.1
Teorema de Van der Waerden
Para provar o teorema de Van der Waerden 0.5, o primeiro passo é fazer
uma tradução desses problemas de coloração para o contexto de sistemas
dinâmicos. O lema 3.9 é responsável por essa tradução.
3.2.
47
SISTEMAS DINÂMICOS SIMBÓLICOS
Aqui, será usado freqüêntemente as terminologias estabelecidas na página
6. O sistema dinâmico que será tratado aqui é o sistema dinâmico simbólico
estabelecido no início desta seção.
O principal resultado ustilizado nesta
subseção é aquele provado na seção de Recorrência Múltipla do capítulo
3
Recorrências .
Lema 3.9 (Furstenberg)
todo
x ∈ X,
todo
m∈Z
m
T x, T m+n x, . . . , T m+nk x
ε>0
e todo
tem diamêtro menor que
Prova:
e
Y
ε > 0,
k ∈ N,
existem
e
(X, T ) qualquer.
n ∈ N tais que
Para
ε.
Toma-se um sistema dinâmico
toma-se
Y = Z · x.
Por
Y
(X, T ) qualquer. Dados k ∈ N, x ∈ X
T -invariante, segue que
ser o fecho de um
é invariante.
Dene-se
Ti := T i .
comutativos agindo em
e
Dado um sistema dinâmico
nj → ∞
Logo
Y.
{T1 , . . . , Tk }
é uma família de homeomorsmos
Logo, pelo teorema 2.13, segue que existem
y∈Y
tais que
n
n
T1 j y → y, . . . , Tk j y → y.
Logo existe
n∈N
T1n y, . . . , Tkn y ∈ B(y; ε/8).
n
n
n
uniforme de T1 , T2 , . . . , Tk , segue
tal que
Pela continuidade
que existe
δ>0
tal
que
d(a, b) < δ =⇒ mín {d(T1n a, T1n b), . . . , d(Tkn a, Tkn b)} < ε/8.
y ∈ Y = Z · x,
mín {δ, ε/8}. Logo
Por
segue que existe
m ∈ Z
tal que
d(T m x, y) <
d(T m x, y), d(T1n y, T1n (T m x)), . . . , d(Tkn y, Tkn (T m x)) < ε/8.
Mas isso quer dizer que
d(y, T m x), d(T n y, T m+n x), d(T 2n y, T m+2n x), . . . , d(T kn y, T m+kn x) < ε/8.
Tem-se que, para qualquer
q ∈ {0, 1, . . . , k},
vale
d(y, T m+nq x) ≤ d(T m+nq x, T nq y) + d(T nq y, y) < ε/8 + ε/8 = ε/4.
3 Ver seção 2.4
48
CAPÍTULO 3.
T m x, . . . ,T m+nk x ∈ B[y; ε/4].
T x, . . . , T m+nk x é menor que ε.
Portanto
m
TEORIA DO NÚMEROS
Ou seja, o diâmetro do conjunto
Segue, abaixo, o enunciado e a demonstração do teorema de Van de Waerden 0.5.
Teorema 3.10 (Van der Waerden)
Z = C1 ∪ C2 ∪ · · · ∪ Cr é uma partição nita, então, para algum j ∈ {1, 2, . . . , r}, Cj contém uma progressão
aritmética nita de tamanho arbitrário. Ou seja, toda coloração nita de Z
Se
contém uma P.A. de tamanho arbitrário nito monocromática.
Prova:
Dada uma coloração
Z = C1 ∪ · · · ∪ Cr
4
de r cores, dene-se o sistema dinâmico (Ω, T ) de deslocamento , onde Ω =
ΛZ = {1, . . . , r}Z . Mune-se Ω da métrica d denida em 3.5. Note que essa
métrica tem a propriedade de
d(x, y) < 1 ⇐⇒ x0 = y0 .
xt = i, se t ∈ Ci . Pelo lema 3.9, dado um
m
m+n
tamanho k ∈ N, existem m ∈ Z e n ∈ N tais que T x, T
x, . . . , T m+nk x
tem diâmetro menor que 1. Pela métrica, segue que
Toma-se o ponto
x∈Ω
tal que
(T m x)0 = · · · = (T m+nk x)0 .
Ou seja,
xm = · · · = xm+nk .
Isso quer dizer que
{m, . . . , m + nk} ⊂ Cj ,
onde
j := xm ∈ {1, . . . , r}.
Observação:
Um fato interessante é que o lema 3.9 é uma versão dinâmica
do teorema de Van der Waerden: ele é equivalente ao teorema de Van der
Waerden.
Para provar o lema
4 Denido em 3.5.
3.9
usando o teorema de Van der Waerden,
3.2.
SISTEMAS DINÂMICOS SIMBÓLICOS
r
[
X =
Fi por conjuntos
S i=1
Z = ri=1 Ci , onde
basta tomar uma partição nita de
diâmetro menor que
ε5 .
Segue que
49
fechados de
Ci = {t ∈ Z : t · x ∈ Fi } ,
Z. Logo, pelo teorema de Van der Waerden, para todo k ∈
N, existem m ∈ Z e n ∈ N tais que {m, m + n, . . . , m + nk} está inteiramente
contido em algum Cj . Ou seja,
m
T x, . . . , T m+nk x ⊂ Fj ,
é uma partição de
donde segue a tese do lema 3.9.
5 Essa partição existe por
X
ser compacto
50
CAPÍTULO 3.
TEORIA DO NÚMEROS
Apêndice A
Transitividade Topológica
Nessa seção, será discutido uma noção ligada às noções de conjuntos minimais
e de recorrência: a de transitividade topológica.
Denição A.1 (Transitividade topológica)
(X, Z)
nâmico.
x∈X
Seja
(X, Z)
um sistema di-
é denominado topologicamente transitivo se existe algum
tal que
Z · x = X.
Proposição A.1
Seja
(X, Z) um sistema dinâmico.
As seguintes armações
são equivalentes:
1.
(X, Z)
é topologicamente transitivo;
2. Se
U ⊂X
3. Se
U, V ⊂ X
é um aberto não-vazio invariante, então
são abertos não-vazios, então existe
U
é denso em
n∈Z
X;
tal que
n · U ∩ V 6= ∅.
Prova:
1 ⇒ 2: Assumindo 1, toma-se x ∈ X tal que Z · x = X . Logo, dado
U ⊂ X , existe n ∈ Z tal que n · x ∈ U . Como U é invariante,
um aberto
segue que
Z · x = Z · (n · x) ⊂ U.
Portanto
U ⊃ Z · x = X.
Isso completa a prova de que
completa a prova de que 1 implica 2.
51
U =X
e, portanto,
52
APÊNDICE A.
2 ⇒ 3:
U, V
Sejam
TRANSITIVIDADE TOPOLÓGICA
abertos não-vazios de
invariante não-vazio de
X.
X.
Logo, pela hipótese,
Segue que
Z·U
Z·U
é um aberto
é denso. Portanto
Z · U ∩ V 6= ∅.
Ou seja, existe
3 ⇒ 1:
n∈Z
tal que
n · U ∩ V 6= ∅.
Um espaço métrico compacto satisfaz o segundo axioma da enu-
merabilidade, ou seja, possui uma base enumerável. Toma-se uma base enumerável
{Vj }j∈N .
Então, para cada
j ∈N
,
Z · Vj
é aberto e, então, (pela
hipótese) tem interseção não-vazia com todo aberto de
denso em
X.
Portanto
I=
∞
\
X.
Z · Vj
Ou seja,
é
Z · Vj
j=1
é uma interseção enumerável de abertos densos. Pelo teorema de Baire, isso
é não vazio. Toma-se
que
n · x ∈ Vj .
x ∈ I.
Tem-se que, para todo
Portanto a órbita de
aberto básico, ou seja, é densa em
X.
x
j ∈ N,
existe
n∈Z
tal
tem interseção não vazia com todo
Isso completa a prova de que
topologicamente transitivo.
(X, Z) é
A proposição a segur mostra uma condição suciente para que um sistema
dinâmico transitivo seja minimal.
Proposição A.2
sui uma métrica
isometria, então
Prova:
Seja
d). Se
(X, T )
(X, T )
existe uma métrica equivalente a
d
tal que
T
X
pos-
é uma
é minimal.
Com efeito, sejam
(X, T )
um sistema dinâmico transitivo (com a
φ uma métrica equivalente à d tal que T é uma isometria.
x ∈ X tal que Z · x = X . Dado y ∈ X , provemos que sua órbita
é densa em X . Dados z ∈ X e ε > 0, segue que existem n, m ∈ Z tais que
d(m · x, y) < 2ε e d(n · x, z) < 2ε . Portanto
métrica
d
um sistema dinâmico transitivo (onde
) e
Toma-se
d(z, (n − m) · y) ≤ d(z, n · x) + d(n · x, (n − m) · y)
= d(z, n · x) + d(m · x, y)
< ε
Isso completa a prova da proposição.
Referências Bibliográcas
[1] Birkho, G. D. Dynamical Systems. Colloquium Publications IX, America Mathematical Society. Providence, 1927.
[2] Ellis, R. Lectures on Topological Dynamics. New York: W.
A. Benjamin, Inc., 1969.
[3] Furstenberg, H. Disjointness in ergodic theory, minimal,
sets and problem diophantine approximation. Math Systems Theory, 1967.
[4] Furstenberg, H. Recurrence in ergodic theory and combi-
natorial number theory. Princeton, N.J.: Princeton University Press, 1981.
[5] Hardy, G.H.; Littlewood, J.E. The fractional part of
nk θ.
Acta Math, 1914.
[6] Kra, B. A Generalization of Furstenberg's Diophantine result. Proc. Amer. Math. Soc., 127, 7, 1951-1956, 1999.
[7] Kronecker, L. Zwei Sätze über Gleichungen mit ganzzahli-
gen Coecienten. J. Reine Angew. Math, 1857.
[8] Lucatelli Nunes, F. Elementos de Topologia para Sistemas
Dinâmicos.
[9] Lucatelli Nunes, F. Relatório da Iniciação Cientíca 2009-
2010.
[10] Tao, T.; Vu, Van H. Additive Combinatorics. Cambridge:
Cambridge Studies in advanced Mathematics, 2006.
53
54
REFERÊNCIAS BIBLIOGRÁFICAS
[11] Waerden, B.L. Van der. Beweis einer Baudetschen Vermu-
tung. Nieuw. Arch. Wisk., 1927.