Departamento de Física da Faculdade de Ciências da Universidade de Lisboa
Mecânica A
2008/09
_____________________________________________________________________________________________
MOMENTO DE INÉRCIA DE UM CORPO RÍGIDO
1.
Objectivo
•
Estudo do movimento de rotação de um corpo rígido.
•
Determinação do momento de inércia de um corpo em relação a um eixo.
•
Estudo da variação do momento de inércia de um corpo com a distância ao eixo de rotação.
2.
Introdução
Momento angular de uma partícula
r
Define-se momento angular L de uma partícula em relação a um ponto O como o produto
r
r
vectorial do vector posição r da partícula, pelo vector momento linear mv ,
r r
r
L = r × mv
(1)
Em geral, o momento angular de uma partícula varia em módulo e direcção durante o
movimento. Se o movimento ocorre num plano que contém o ponto O, a direcção do momento
r
r
angular permanece constante, ou seja, perpendicular ao plano, visto que r e v estão contidos no
plano.
No caso especial do movimento circular, quando o momento angular se calcula em relação
r
r
ao centro do círculo, os vectores r e v são perpendiculares e verificam a relação v = ω r , sendo
ω a velocidade angular, donde:
L = mvr = mω r 2
(2)
r
r
No movimento de uma partícula o sentido de L coincide com a direcção de ω e podemos escrever
a relação vectorial:
r
r
L = mr 2ω
Derivando a relação (1) em ordem ao tempo, vem:
r
r
r
r
r
r
r
r dv r
r r dp
dL d (r × mv ) dr
=
=
× mv + mr ×
= v × mv + r ×
dt
dt
dt
dt
dt
(3)
(4)
Momento de inércia
r r
Em (4) a 1ª parcela é nula e a 2ª vem igual a r × F , pelo que a variação no tempo do momento
angular é igual ao momento da força aplicada ou resultante das forças aplicadas e escrevemos,
r
r
dL r r
= r×F = M
(5)
dt
Momento angular e momento de inércia de um corpo rígido
Para um sistema constituído por muitas partículas o momento angular total é a soma dos
momentos angulares de todas as partículas,
r
r
L = ∑ Li
(6)
i
Um corpo rígido é um caso especial de um sistema composto por muitas partículas. As
partículas de um corpo rígido em rotação em torno de um eixo fixo descrevem circunferências
r r
r
r
centradas no eixo de rotação com uma velocidade vi = ω i × ri . A velocidade vi da partícula é,
assim, proporcional ao raio da circunferência que descreve.
vi = ω ri senθ i = ω Ri
(7)
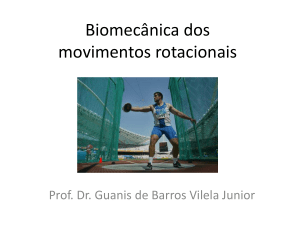
Z
ω
Ri
vi
mi
LiZ θ
Li
ri
O
r
r
No movimento circular ri é perpendicular a vi . A projecção do momento angular de uma partícula
segundo o eixo de rotação vem:
r
r
r
Liz = L cos(90 − θ i ) = ri × mvi senθ i = mi ri vi senθ i = mi vi Ri = miω Ri2
(8)
e a projecção do momento angular total segundo o eixo de rotação é dada por:
L z = ∑ Liz = ∑ mi Ri2 ω = Iω
i
i
(9)
I representa o momento de inércia do corpo. Para uma distribuição continua de massa,
I = ∫ r 2 dm ,
(10)
2(6)
Momento de inércia
onde dm representa a massa de um elemento infinitesimal colocado à distância r do eixo de rotação,
sendo o integral estendido a todo o corpo. A partir desta equação pode-se compreender que o
momento de inércia de um corpo em relação a um eixo depende, não só, do eixo em torno do qual
ele gira, mas também, da forma do corpo e da distribuição da massa.
Num sistema de muitas partículas, o vector momento angular não tem, em geral, a direcção
do eixo de rotação. Quando coincidem diz-se que o eixo de rotação é um eixo principal de inércia e
vem
r
r
L = Iω
(11)
Os eixos de simetria são eixos principais de inércia.
Tal como o momento linear caracteriza a quantidade de movimento de translação, o
momento angular caracteriza a quantidade de movimento de rotação. A grandeza responsável pela
r
alteração do estado de rotação é o momento resultante das forças exteriores aplicadas M ext que se
relaciona com o momento angular do corpo por:
r
r
dL
M ext =
(12)
dt
Esta expressão é idêntica à obtida para uma partícula (5). A relação (12) é formalmente análoga à
r dpr
relação F =
para o movimento de translação.
dt
Como, para um corpo rígido, o momento de inércia I é constante, das relações (11) e (12)
obtemos:
r
r
r
r
d (Iω )
dω
M ext =
=I
= Iγ
dt
dt
r
r
M ext = Iγ
Ou seja
r
onde γ representa a aceleração angular do movimento.
3.
(13)
(14)
Para resolver antes da aula de realização do trabalho
1) Qual é o momento de inércia de uma massa pontual de 100 g, relativamente a um eixo do
qual dista 10 cm.
2) Qual é o momento angular da massa anterior quando roda em torno do eixo referido com
uma velocidade angular de 6,0 rad/s.
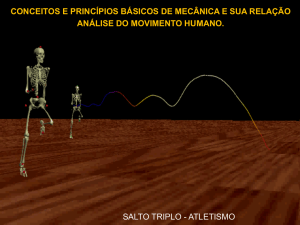
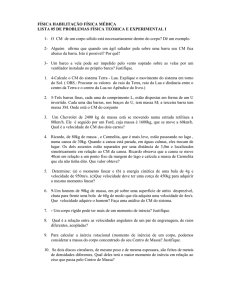
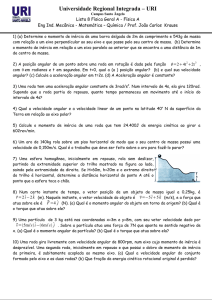
3) Dois cilindros de massa
m1, raio r e altura h estão presos sobre uma barra de
comprimento Lb e massa mb que roda em torno de um eixo perpendicular à barra e que
passa pelo seu centro (fig. 1). A distância do centro de massa de m1 ao eixo de rotação é d.
3(6)
Momento de inércia
a) Escreva uma expressão para o momento de inércia do sistema em termos dos
parâmetros acima referidos, recorrendo à informação que encontrará na última página
deste documento.
b) Calcule o momento de inércia do sistema para m1 = 250 g, r = 1,5 cm, h = 1,5 cm, Lb
= 60 cm, mb = 150 g e d = 25 cm.
4.
Realização experimental
Neste trabalho estuda-se a variação de momento angular de um sistema em função do seu
momento de inércia e do momento resultante aplicado.
Material
•
Barra cilíndrica, apoiada no centro, onde se podem posicionar duas massas iguais a
diferentes distâncias. Este sistema é colocado sobre um eixo de teflon de forma a reduzir o
atrito no movimento de rotação.
•
Massas de 100 g, 150 g e 200 g.
•
Prato suspenso por um fio e roldana.
•
Sensor óptico ligado ao computador para registo de posições e velocidades.
•
Craveira, balança.
Para iniciar o movimento de rotação aplica-se um momento constante, suspendendo uma
massa m num fio que se encontra preso, via uma roldana, no eixo de rotação com fita velcro (supõese que as forças de atrito mais importantes correspondem ao atrito sólido entre o sistema e o eixo
em que está apoiado, o que corresponde a um momento das forças de atrito também constante). O
fio é enrolado um número de voltas determinado, conforme se pretende uma duração maior ou
menor do tempo de aplicação do momento. Sugere-se que a configuração inicial da barra seja a
correspondente às massas m1 nas posições extremas (d ≈ 27.5 cm).
1. O sistema é preparado suspendendo uma massa m de 200 g no extremo do fio, preso pela fita
velcro e enrolado com 10 voltas. Mantendo o sistema imóvel, inicia-se no computador o registo
temporal da velocidade angular do sistema (programa DataStudio, opção sensor óptico: “polia
inteligente rotativa”, distância angular = 20º) e liberta-se o sistema.
a) Registe os resultados obtidos para a velocidade angular em função do tempo e a partir deles:
i) Caracterize os diferentes tipos de movimento que o sistema apresenta.
ii) Obtenha a aceleração angular do movimento inicial.
4(6)
Momento de inércia
iii) Estime a aceleração angular média devida ao momento das forças de atrito.
iv) Calcule a aceleração angular associada ao momento da força de tensão.
v) Indique o tipo de movimento da massa m e a aceleração linear correspondente. Calcule a
tensão no fio enquanto a massa desce.
vi) Calcule o momento aplicado pela tensão do fio em que o peso está suspenso.
vii) Calcule o momento de inércia do sistema.
b) Repita a sua experiência utilizando mais duas massas m (150 g e 100 g) para variar o
momento aplicado.
2. O momento de inércia do sistema varia nesta experiência? Quais são as duas quantidades
fundamentais que variam e qual a relação entre elas? Calcule o valor médio dos três valores que
obteve para o momento de inércia do sistema na configuração utilizada e o maior desvio
relativamente à média. Apresente o resultado sob a forma I ± ∆I .
m1
Fig. 1: Para desencadear o movimento de rotação do
varão, ao qual se adaptam as massas m1, enrola-se um
fio em torno do cilindro de raio r, coaxial com o eixo de
rotação, aplica-se um momento de força suspendendo
do fio, que passa pela roldana, a massa m e liberta-se
em seguida o sistema. Um sensor de posição permite
medir tempos de passagem para o movimento de
rotação.
r
m
3. Para uma dada força de tensão aplicada (uma dada massa m, já utilizada nos ensaios anteriores),
altere a posição das massas m1 três vezes (mantendo-as equidistantes do centro) e repita o
estudo realizado em 1 a) com o objectivo de determinar o momento de inércia do sistema em
cada uma destas condições.
4. Meça também o momento de inércia do varão (sem massas).
5. Represente graficamente os momentos de inércia obtidos em 1) e 3) em função do quadrado da
distância das massas ao centro de rotação. Explique o gráfico obtido. Interprete os parâmetros
da recta ajustada e compare-os com os valores esperados.
5(6)
Momento de inércia
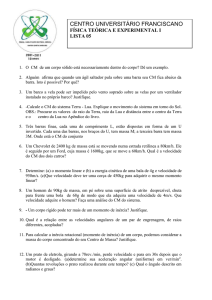
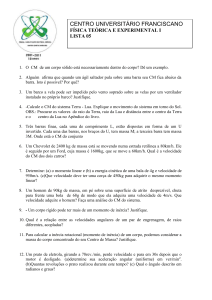
MOMENTOS DE INÉRCIA
CILINDRO
raio r,
altura h,
massa m
Iz =
mr 2
2
Ix = Iy =
BARRA
comprimento L,
secção nula,
massa m
Ic =
m
(3r 2 + h 2 )
12
mL2
12
Adaptado de http://en.wikipedia.org/wiki/List_of_moments_of_inertia.
TEOREMA DOS EIXOS PARALELOS
A relação entre o momento de inércia de um sólido em relação a um eixo de rotação que passa pelo
seu centro de massa, I CM , e o seu momento de inércia em relação a outro eixo paralelo ao primeiro,
I p , é dada por
I p = I CM + md 2
onde m é a massa do objecto e d é a distância entre os eixos paralelos.
6(6)