Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Cinemática de Corpos Rígidos ..................................................................................... 2
Revisão de Vetores ................................................................................................... 2
Cinemática de corpos rígidos .................................................................................. 11
Análise do Movimento Absoluto .............................................................................. 24
Análise do Movimento Relativo ............................................................................... 32
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Cinemá tica de Corpos Rı́gidos
Revisã o de Vetores
O que é um vetor? Quando estudamos Física, precisamos representar as grandezas, pois
as medidas são muito importantes, e só podemos fazer ciência e tecnologia com elementos e
experimentos que podem ser medidos de alguma forma. Temos grandezas físicas que
precisam apenas de uma unidade de grandeza para que sejam completamente descritas, como
por exemplo, se no laboratório você pesa uma máquina, e precisa informar outra pessoa, você
irá dizer algo como: “Esta componente pesa 100 kg”. Ou se você cronometrar o tempo que um
carro leva para percorrer um trajeto vai falar o tempo em horas, minutos ou segundos.
Entretanto, há também grandezas que precisam de um pouco mais de especificação, e nesta
seção trataremos delas, são as grandezas vetoriais. Essas grandezas precisam de magnitude
(ou módulo, ou comprimento), direção e sentido. Nesta seção iremos desenvolver a intuição
geométrica e a álgebra de vetores, de forma sistemática, para que depois possamos aplicar
esse conhecimento em seções futuras e em conceitos mais complexos.
Fixando Conceitos
Grandezas vetoriais precisam de três especificações para que sejam descritos completamente:
comprimento, direção e sentido. Exemplos de grandezas vetoriais: velocidade, aceleração, forças, etc.
Grandezas escalares necessitam apenas de seu valor e a unidade da grandeza para que sejam
completamente descritas. Exemplos são: temperatura, pressão, tempo.
Figura 1.1: Regra do paralelogramo.
Na figura 1.1 vemos dois exemplos de vetores, representados por flechas, ou de forma
mais precisa, segmentos de reta orientados. Vemos, por exemplo, o deslocamento de uma
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
partícula que se move do ponto A até o ponto B, e temos a seguinte notação AB a . Uma
das propriedades dos vetores é que eles podem deslizar, ou seja, podemos ter o mesmo vetor
se movendo do ponto C ao ponto D, CD a . Podemos dizer que dois vetores são iguais se
são lados opostos em um paralelogramo, como mostrado na figura 1.1, e se tiverem o mesmo
sentido, direção e módulo. O comprimento do vetor a é representado entre barras, a e
indica o comprimento do vetor, sendo um número real.
Uma das características práticas dos vetores, é que podemos realizar operações com
eles, o que torna a descrição de grandezas físicas muito mais fácil. Os vetores são somados
seguindo a regra do paralelogramo, que foi representada na figura 1.1. Por exemplo, se uma
2
km. Vamos supor que temos três vetores a , b e c , e verificar que tipos de propriedades a
partícula se move 1 km para o norte, e 1 km para o leste, seu deslocamento total foi de
soma desses vetores possui. Na figura 1.2, vemos dois exemplos de somas de vetores, usando
a propriedade de deslizamento dos vetores, conseguimos desenhar paralelogramos, e
realizando as somas a b
e a b c . Note, entretanto, que os vetores não
necessariamente precisam se encontrar no mesmo plano, ou seja, a figura 1.2 não é uma regra
geral, sendo apenas uma representação em duas dimensões, porém a regra para três
dimensões é completamente análoga.
Figura 1.2: Figura ilustrativa da regra do paralelogramo (soma de vetores)
As regras de somas de vetores representadas na figura 1.2 são bem ilustrativas, mas não
exploram por completo a linguagem de vetores. Um dos trunfos de usar vetores em teorias
físicas é que podemos representar os mesmos por coordenadas, e realizar diversos tipos de
operações com esses vetores, e em mais dimensões. Quando trabalhamos com física clássica
não relativística, sempre pensamos em três dimensões, e o tempo como parâmetro, mas em
outras teorias, como a Relatividade Especial de Einstein, pensamos em quatro dimensões,
onde o tempo é considerado uma dimensão.
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Curiosidade
Relatividade Especial, ou também conhecida como Teoria da Relatividade Especial de Einstein, foi
primeiramente descrita em 1905 por Albert Einstein, em seu artigo “On the Electrodynamics of moving
bodies”. Nessa teoria Einstein explora a relação entre tempo e espaço, modificando as teorias
anteriormente descritas por Galileu e Newton, considerando efeitos decorrentes do fato da velocidade
da luz ser limitada, e possuir o mesmo valor para qualquer referencial.
Representar vetores de forma algébrica tem suas vantagens quando queremos fazer
descrições físicas em um grande número de dimensões, mas vamos nos ater a apenas três
dimensões no máximo no curso de Dinâmica de Corpos Rígidos. Vetores obedecem as
seguintes propriedades e operações:
1) Comutatividade: a b b a
2) Associatividade: a b c (a b ) c a ( b c )
3) Elemento neutro: a 0 0 a a
4) Inverso aditivo: a ( a ) ( a ) a 0
As operações com vetores também possuem propriedades de multiplicação de vetores
por constantes pertencentes aos conjuntos dos números reais:
1) Distributividade na soma: a b a b
2) Distributividade na multiplicação: a a a
3) Associatividade: ( )a ( a )
4) Elemento neutro: 1 a a 1 a
5) Inverso aditivo: a ( a ) ( a ) a 0
Essas propriedades são chamadas de axiomas, e constituem a estrutura matemática na
qual podemos nos basear para realizar todos os tipos de operações com vetores. Para
concretizar todos esses conceitos abstratos, precisamos aprender a calcular com vetores, e
para isso precisamos de coordenadas. Os vetores podem ser representados por valores de
cada uma de suas componentes, assim, um vetor em n dimensões é representado por
a ( x1, x2 ,..., xn ) , em nosso caso trabalharemos com dimensões igual a 2 e 3. Os valores
dentro dos parênteses e separados por vírgulas são as componentes, os índices subscritos
representam a posição da componente, x1 é a componente 1, x 2 é a componente 2, e xn é a
enésima componente do vetor a . Podemos aplicar os axiomas das operações de vetores às
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
suas componentes. Sejam dois vetores e suas respectivas coordenadas a ( x1, x 2 ,..., xn ) e
b ( y1, y 2 ,..., y n ) , podemos somar estes dois vetores da seguinte forma:
a b ( x1, x2 ,..., xn ) ( y1, y 2,..., y n ) ( x1 y1, x2 y 2 ,..., xn y n ) .
E também podemos multiplicar vetores por números reais (constantes) da seguinte
forma:
a ( x1, x2 ,..., xn ) ( x1, x2 ,..., xn ) .
Os outros axiomas são representados de forma análoga.
Exemplo
Sejam dois vetores e suas respectivas coordenadas a (1,3,4) e b (2,5,6) a soma desses
dois vetores é igual à a b (1,3,4) (2,5,6) (3,8,10) . Se multiplicarmos o vetor a (1,3,4)
pela constante 4, teremos o seguinte resultado:
4a 4(1,3,4) (4 1,4 3,4 4) (4,12,16) .
Na figura 1.3 a representação geométrica de vetores para a soma de vetores, e
multiplicação por um escalar, exemplo de colinearidade, paralelismo e antiparalelismo.
Figura 1.3: Soma de vetores e multiplicação por escalar.
Outra propriedade de vetores, é que a soma de vetores resulta em outro vetor, de
forma que v a b , nesse caso, dizemos que o vetor v é uma combinação linear dos
vetores a e b . Na figura 1.4 vemos a representação por flechas dessa combinação linear
resultando em outro vetor.
Figura 1.4: Combinação linear dos vetores a e b : v a b .
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Podemos definir o conceito de dependência linear, da seguinte forma: Os vetores
a1, a2 ,..., an onde n é um número inteiro, são ditos linearmente independentes, se a seguinte
equação 1a1 2a2 ... n an 0 , onde n é um número inteiro, e 1, 2 ,..., n são
constantes reais, for válida se e somente se 1 2 ... n 0 . Quando tivermos vetores
linearmente independentes, podemos formar o que chamamos de base.
No plano Euclidiano temos os versores, que nada mais são do que vetores que possuem
comprimento igual à unidade, i (1,0) e j (0,1) .
Fixando Conceitos
Verifique que o conjunto formado pelos versores i (1,0) e j (0,1) forma um conjunto de vetores
linearmente independentes. Ou seja, resolva a equação vetorial:
i j (1,0) (0,1) ( , ) (0,0) ,
e demonstre que essa igualdade é válida somente quando tivermos simultaneamente 0 .
Provando dessa maneira que podemos descrever qualquer vetor do plano Euclidiano em função desses
dois vetores.
O conjunto formado por esses dois vetores é chamado de base canônica do Plano
Euclidiano, ou simplesmente base canônica. Podemos descrever então qualquer vetor no
plano em função dos vetores da base. Seja o vetor v ( x, y ) onde x e y são as coordenadas
do vetor na base canônica, e podemos representar esse vetor como combinação linear de
i (1,0) e j (0,1) da seguinte forma:
v xi y j x (1,0) y (0,1) ( x, y ) .
Fixando Conceitos
É importante não confundir a representação em uma base com a simples soma de vetores. Por exemplo,
se tivermos os seguintes vetores a (1,3) e b (2,5) a soma desses dois vetores resulta em um vetor
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
v a b (1,3) (2,5) (3,8) , entretanto os vetores a e b não são linearmente independentes,
portanto não formam uma base, ou seja, não podemos representar qualquer vetor pela combinação
linear desses vetores. Entretanto, a soma desses vetores é um vetor, e pode ser representado na base
canônica, pelos versores i (1,0) e j (0,1) , da seguinte forma:
v (3,8) 3i 8 j 3(1,0) 8(0,1) .
O plano Euclidiano é representado por dois segmentos de reta ortogonais entre si, ou
seja, o ângulo entre os dois segmentos é de 90º, como pode ser visto na figura 1.5.
Figura 1.5: Representação do plano Euclidiano na base canônica.
Note na figura 1.5 que o vetor v é o resultado da combinação linear entre os vetores da
base canônica de i (1,0) e j (0,1) . Da mesma forma podemos estender esses resultados
para maiores dimensões, entretanto, nós seres humanos só conseguimos perceber de forma
concreta até três dimensões. Os versores da base canônica em três dimensões, ou Espaço
Euclidiano Tridimensional são i (1,0,0) , j (0,1,0) e k (0,0,1) .
Figura 1.6: Espaço Euclidiano de três dimensões
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Na figura 1.6 vemos que o vetor OP ( x, y , z ) pode ser representado na base canônica
do Espaço Euclidiano da seguinte forma:
OP ( x, y , z ) xi y j zk .
Dissemos no início da seção que vetores precisam de comprimento, direção e sentido
para que sejam completamente descritos, pois bem, construímos até agora esses três
requisitos. Os vetores da base que o vetor está descrito dizem a direção e sentido. Vetores são
ditos colineares, ou seja, possuem a mesma direção quando são linearmente dependentes,
matematicamente isso quer dizer que dados dois vetores colineares a e b temos a seguinte
relação entre eles, b a onde é uma constante real. Se 0 , então a e b além da
mesma direção, possuem o mesmo sentido. Se 0 , então a e b possuem a mesma
direção, mas sentidos diferentes. Se 0 então b é o vetor nulo, e a é qualquer vetor. Na
figura 1.7 vemos um exemplo de vetores colineares ao vetor a , possuem mesma direção. O
vetor a possui sentido diferente e o vetor a possui sentido igual ao vetor a .
Figura 1.7: Vetores colineares, mesma direção e sentidos diferentes.
O módulo de um vetor v ( x1, x2 ,..., xn ) representado pela notação v
calculado da seguinte maneira:
v x12 x2 2 ... xn 2 .
Exemplo
Seja o vetor v (1,2,3) , seu módulo é v 14 , pois:
v 12 22 3 2 11 4 9 14 .
sendo
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Na figura 1.8 vemos um exemplo de movimento retilíneo com velocidade constante,
descrito vetorialmente. O corpo se encontra inicialmente no ponto P ( x p , y p ) , no instante
inicial e o vetor posição neste ponto é r ( x p , y p ) , o vetor m (a, b ) é o vetor direção da
trajetória do corpo rígido.
Figura 1.8: Representação vetorial do movimento de um corpo rígido.
Fisicamente a interpretação desse vetor é a velocidade do corpo rígido. A posição do
corpo em um tempo t qualquer é designada pelo vetor r (t ) r p m t :
r (t ) ( x p , y p ) (a, b ) t ( x p at , y p bt ) .
Exercício Proposto
Enunciado:
Sejam os seguintes vetores no plano Euclidiano (em duas dimensões), R (1,1) , e S (2,3) .
Ambos representados na mesma base. Determine a soma vetorial S 2R , e marque a alternativa
correta.
Resposta:
Para calcular a soma vetorial, basta aplicar os axiomas de vetores às suas componentes.
S 2R (2,3) 2(1,1) (2 2 1,3 2 1) (4,5)
Exercício Proposto
Enunciado:
Um corpo rígido possui sua posição descrita pelo seguinte vetor no plano Euclidiano, R (1,2) , sendo o
sistema de unidades em quilômetros (km). Calcule o módulo do vetor e marque a alternativa correta.
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Resposta:
O módulo do vetor é calculado pela soma do quadrado de suas componentes, e tirando sua raiz
quadrada. Dessa maneira calculamos:
R (1,2) R 12 22 1 4 5 .
Assim, o módulo do vetor é igual a
5 km.
Exercício Proposto
Enunciado:
Descreva a trajetória de uma partícula realizando um movimento helicoidal.
Resposta:
Vimos que para trajetórias retilíneas, as componentes da velocidade são constantes no tempo, e o
vetor posição é descrito por r (t ) ( x p at , y p bt ) onde ( x p , y p ) é o ponto inicial no instante t 0 ,
e o vetor velocidade é v (a, b ) . Para fazer a descrição da trajetória da curva helicoidal, precisaremos
fazer essa descrição no espaço de três dimensões, e o vetor posição é parametrizado pelo parâmetro
tempo (t), entretanto, as componentes são funções desse parâmetro r (t ) x (t )i y ( t ) j z(t )k e a
parametrização do helicoide é dada por:
r (t ) R cos(t )i R sen(t ) j c t k .
Onde c é uma constante real qualquer, e R é o raio da helicoide. Na figura 1.9 podemos ver a
descrição da trajetória no espaço de três dimensões, com os valores das constantes dadas por R 1,
1 e c 0,1 .
Figura 1.9: Gráfico da trajetória helicoidal
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Cinemá tica de corpos rı́gidos
Quando estudamos Física, precisamos representar as grandezas, pois as medidas são
muito importantes, e só podemos fazer ciência e tecnologia com elementos e experimentos
que podem ser medidos de alguma forma. Temos grandezas físicas que precisam apenas de
uma unidade de grandeza para que sejam completamente descritas. São as grandezas
escalares. Por exemplo, se no laboratório você verifica a massa uma componente em uma
balança e precisa informar outra pessoa, irá dizer algo como: “Esta componente tem uma
massa de 100kg”. Ou se você cronometrar o tempo que um carro leva para percorrer um
trajeto vai falar o tempo em horas, minutos ou segundos. Como você já sabe, há também
grandezas que precisam de um pouco mais de especificação, e nesta seção trataremos delas,
são as grandezas vetoriais. Elas precisam de magnitude (ou módulo, ou comprimento), direção
e sentido para serem completamente descritas. Nesta seção iremos utilizar esses conceitos no
contexto dos corpos rígidos, desenvolvendo ainda mais nossa intuição geométrica, aplicando a
álgebra dos vetores de forma sistemática.
Um vetor v qualquer sobre o plano cartesiano pode ser representado através da
combinação linear dos vetores da base canônica i (1,0) e j (0,1) , que representam um
deslocamento de módulo 1 na direção positiva dos eixos x e y, respectivamente. Os versores
da base canônica em três dimensões, ou Espaço Euclidiano Tridimensional, são i (1,0,0) ,
j (0,1,0) e k (0,0,1) . Como pode ser visto na figura 1.10, vemos que o vetor
OP ( x, y , z ) pode ser representado na base canônica do Espaço Euclidiano da seguinte
forma, OP ( x, y , z ) xi y j zk .
Figura 1.10: Espaço Euclidiano de três dimensões
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Além das já conhecidas operações com vetores que foram estudadas em outros cursos,
como soma vetorial, combinação linear, podemos também aplicar operações do cálculo
diferencial e integral, ou seja, as componentes dos vetores podem ser funções bem
comportadas (contínuas e diferenciáveis).
Exemplo
Seja a seguinte função vetorial, r (t ) (cos(t ), sen(t ), tg (t )) , que representa o vetor posição do
centro de massa (CM) de um corpo rígido no espaço de três dimensões como função do tempo. A
posição varia com o tempo, e para encontramos a velocidade desse corpo rígido, basta derivar o vetor
posição em relação ao tempo:
dr
v (t )
(t ) ( sen(t ),cos(t ),sec 2 (t )) .
dt
Note que derivamos cada componente do vetor posição individualmente, compondo assim o novo vetor
velocidade.
Mas o plano e o espaço Euclidiano não servem apenas para representar vetores, em
geral em Física eles são utilizados para descrever equações de movimento de corpos (rígidos
ou não), e partículas, por meio dos chamados sistemas de referências, ou simplesmente
referenciais, que podem ser ou referenciais inerciais ou referenciais não-inerciais. Os
referenciais inerciais se comportam como corpos em equilíbrio estático, ou em equilíbrio
cinético. Já os referenciais não-inerciais se movem com aceleração, constante ou não. Quando
o referencial é inercial e se encontra em equilíbrio estático, o movimento dos corpos rígidos é
chamado movimento absoluto, pois não há efeito de velocidade relativa entre observador e
corpo rígido observado (cada um constituindo individualmente um referencial).
Um exemplo prático de referencial inercial é um carro se movimentando com
velocidade constante. Coloque-se dentro desse carro, se você não olhar para fora, não
perceberá que está em movimento. Imagine agora que você olha pela janela, e vê postes de
luz se movimentando em relação a você. Em um referencial inercial, não conseguimos
distinguir se nós estamos nos movendo em relação ao que observamos, ou se o objeto que
observamos está se movimentando em relação a nós. É claro que na vida real você sabe que
quem está se movendo é o seu carro, mas em termos de teoria física, essa impossibilidade de
distinção é muito importante.
Figura 1.11: Referenciais inerciais.
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
No caso do sistema referencial inercial em movimento relativo, as equações de
movimento obedecem às chamadas transformações de Galileo. No exemplo da figura 1.11
existe um movimento uniforme na direção do eixo x No referencial
corpo rígido possui coordenadas ( x, y , z, t ) . Para o referencial
S , algum ponto de um
S ' esse corpo rígido teria as
coordenadas ( x ', y ', z ', t ') ( x vt , y , z, t ) , a relação entre as coordenadas dos dois
referenciais são as chamadas transformações de Galileo.
Compreenda: para o referencial S (por exemplo, uma pessoa em repouso na calçada) um
determinado ponto do corpo rígido possui coordenadas ( x, y , z, t ) , para uma pessoa no carro,
o corpo rígido parece se afastar, com velocidade igual à do carro no sentido oposto (negativo,
portanto -v ), e assim a coordenada do ponto é ( x ', y ', z ', t ') ( x vt , y , z, t ) .
Isso fica ainda mais evidente quando realizamos a derivada da coordenada
x'
em
relação ao tempo, obtendo a chamada lei de composição de movimentos:
dx ' dx
v
dt
dt
VS ' VS v .
Note que estamos tratando de um caso bastante geral. O corpo rígido não precisa estar
em repouso, portanto
dx
VS , que pode ou não ser zero, constante, ou mesmo uma função
dt
do tempo. Independentemente do estado do corpo rígido, a resposta fornecida pelo
equacionamento apresentado estará correta.
Além do movimento relativo de translação, podemos imaginar outro referencial
gira com velocidade angular
2 f
2
T
S ' que
, com f representando a frequência, e T o
período da rotação. A unidade relevante é radianos por segundo.
Seja
R
o vetor posição desse referencial em relação ao referencial
S estático. Nesse
caso, a posição de um objeto qualquer no referencial S está relacionada com a posição do
objeto no referencial S’ pela equação a seguir:
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
rS rS ' R .
Note que basta somar a posição observada no referencial S’ com a posição da própria
origem do referencial S’ com relação ao observador parado (referencial estático).
Note que o referencial
S ' está girando, de modo que o vetor R não é constante. Para
um observador sobre esse referencial, o referencial S está em movimento circular (lembre-se
se você começar a girar terá a impressão de que o ambiente a sua volta estará girando). Essa
relação é bem descrita por senos e cossenos da seguinte maneira:
R(t ) R cos t i R sen t j .
Onde z é o vetor constante velocidade angular. Como esse vetor varia com o
tempo? Podemos descobrir realizando uma derivada:
dR
R cos t i R sen t j R .
dt
A interpretação física e geométrica desta fórmula é um conceito muito importante em
Dinâmica. A relação nos diz que a velocidade linear é sempre tangente à curva descrita pelo
ponto de interesse. O produto vetorial resulta sempre em um vetor perpendicular aos dois
vetores que estão sendo multiplicados vetorialmente, isso quer dizer que a velocidade
tangencial não está na direção da velocidade angular, nem do vetor posição.
Fixação de Conceitos
dR
R o vetor
Reflita sobre o que o produto vetorial representa geometricamente. Na fórmula
dt
resultante não aponta na direção de nem de R , mas em outra direção, perpendicular a essas duas
direções. Tente, por meio de desenhos e utilizando a regra da mão direita, entender e encontrar essa
direção perpendicular.
Derivando rS rS ' R em relação ao tempo, chegamos no seguinte resultado:
drS drS ' dR drS '
R .
dt
dt
dt
dt
E como seria o caso mais geral possível, levando em consideração um referencial que
realiza tanto uma translação quanto uma rotação, ao mesmo tempo? Descrever o movimento
de um determinado ponto de um corpo rígido qualquer, levando em consideração tanto a
translação quanto a rotação do referencial?
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
vS v vS ' R .
Para descrever a Cinemática de um corpo rígido, precisamos também encontrar sua
aceleração. Sabemos que a derivada segunda da posição resulta em uma aceleração. Se
derivarmos duas vezes em relação ao tempo, a lei de composição de posição do movimento do
corpo rígido tem-se a seguinte relação:
dv S dv dv S ' d
R .
dt
dt
dt
dt
Aplicando a regra da cadeia na última derivada da relação anterior, temos que:
d
d dR
R
R
.
dt
dt
dt
dR
d
R e que a aceleração angular é dada por
Lembrando que
, tem-se:
dt
dt
d
R R R .
dt
Onde aT R é a chamada aceleração tangencial e aN R é a
aceleração normal, ou mais conhecida como aceleração centrípeta. A soma vetorial das duas
acelerações compõe a aceleração total de rotação. Na figura 1.12, podemos ver a
decomposição da aceleração nas componentes tangencial e centrípeta.
Figura 1.12: Componentes tangencial e centrípeta da aceleração total.
Dessa forma, a lei de composição de acelerações tem sua forma geral dada por:
aS a aS ' R R .
A equação acima descreve a aceleração do corpo em uma situação muito geral. Embora
estejamos falando de Cinemática, não custa notar que se multiplicarmos os dois lados da
relação anterior pela massa do corpo rígido, temos a seguinte relação:
FS FNI FS ' FT FC .
Onde:
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
FC é a força centrípeta, sempre radial ao corpo rígido;
FT é a força tangencial à trajetória;
FNI é uma força chamada fictícia (Ou não Newtoniana), pois é uma força que
surge pelo simples fato do referencial S ' estar acelerando;
FS ' é a força que um observador no referencial S ' iria medir;
FS é a força que um observador no referencial S calcularia.
Note que a força FS não pode ser medida experimentalmente por um observador no
referencial S , pois há componentes que surgem do simples fato do referencial S ' estar em
movimento relativo (acelerando e girando). Note que a relação FS FNI FS ' FT FC não
é a Segunda Lei de Newton! Pois não estamos lidando com forças Newtonianas apenas. As Leis
de Newton só são válidas para referenciais ditos inerciais, que estejam em equilíbrio.
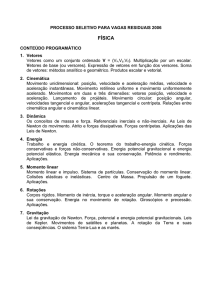
Figura 1.13: Ilustração das componentes de movimento de rotação de um corpo rígido
Na figura 1.13 vemos um movimento de rotação de um determinado ponto do corpo
rígido: a velocidade tangencial R , velocidade angular , vetor posição R , e a
aceleração normal R .
Exercício Proposto
Enunciado:
A figura 1.14 mostra um disco A que gira com velocidade angular constante. Não há deslizamento entre
o disco A, o anel C e o disco B. Como mostra na figura, os discos A e B possuem o mesmo raio RA RB ,
e o disco C possui raio da abertura Rc e uma pequena espessura e. Determine a relação entre as três
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
velocidades angulares A , B , e C .
Figura 1.14: Mecanismo composto de dois discos circulares e um anel
Resposta:
Sabemos que quando discos e anéis estão girando em contato, neste ponto a velocidade tangencial dos
corpos rígidos são iguais. Como temos a relação v r , se igualarmos essa relação para os dois
corpos rígidos em contato. Para o disco A e para o anel C, temos:
A RA C (RC e ) .
Onde e é a espessura do anel C (que precisamos somar ao raio da abertura interna do anel), e os índices
representam os corpos. A partir dessa relação, podemos afirmar que A C , pois RA RC e .
Da mesma forma, temos a seguinte relação, se analisarmos o disco B, e o anel C:
B RB C RC .
Repare que como o disco B se encontra dentro do anel, devemos descontar a espessura do raio.
Podemos afirmar que B C , pois RB RC .
Dividindo a relação A RA C (RC e ) por B RB C RC :
A RA C (RC e )
.
B RB
C RC
Simplificando a relação anterior, lembrando que R A RB , temos que:
A 1
e
RC
B .
Como o fator entre parênteses é maior do que 1, então A B . Assim, temos a seguinte relação entre
as velocidades angulares:
A B C .
Já aprendemos o que são referenciais, como o movimento entre eles afetam as
equações de movimento, a representar trajetórias de corpos rígidos nesses sistemas de
referência, e fizemos tudo isso utilizando coordenadas cartesianas. Agora vamos aprender
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
como utilizar coordenadas curvilíneas. Vimos que para vetores ( x, y , z ) , cada coordenada é
representada por um versor, ou seja, ( x, y , z ) xiˆ yjˆ zkˆ , onde iˆ (1,0,0) , jˆ (0,1,0) ,
e kˆ (0,0,1) . Em breve, vamos utilizar novos sistemas de coordenadas e aprender como
fazer mudanças de um sistema para outro. Então aproveitamos o momento para lembrar
brevemente alguns sistemas de coordenadas importantes. Em duas dimensões, temos as
coordenadas polares ( r , ) , que se correlacionam com as cartesianas da seguinte maneira
x r cos e y r sen . Em três dimensões, podemos estender as coordenadas polares
para as cilíndricas:
( x, y , z ) ( r cos , r sen , z ) .
E temos também as coordenadas esféricas:
( x, y , z ) ( sen cos , sen sen , cos ) .
Onde representamos o raio da esfera como . Na figura 1.15 é possível ver a
representação geométrica entre os sistemas de coordenadas cartesiano e esférico.
Figura 1.15: coordenadas cartesianas, polares, cilíndricas e esféricas.
Exercício Sugerido
Sabemos que ( x, y ) ( r cos , r sen ) para as coordenadas polares no plano. Mostre que a relação
inversa, polares cartesianas, é dada por:
y
r x 2 y 2 , arctan .
x
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
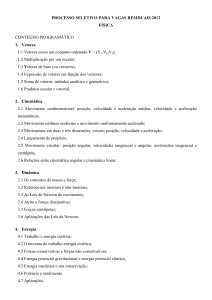
Exercício Proposto
Enunciado:
Na figura 1.16 você pode ver a figura que ilustra um sistema corda + roldana. Uma corda é
amarrada ao redor de uma roldana, de raio igual a 0,2m , que se encontra inicialmente em repouso.
Uma força F foi aplicada na corda, dando a ela uma aceleração linear, cuja lei obedece a seguinte
relação a(t ) 4t , onde o tempo é medido em segundos. Encontre a velocidade e aceleração angular da
roldana em função do tempo no instante t 3s .
Figura 1.16: Ilustração de um sistema corda + roldana.
Resposta:
O enunciado nos disse que após a força ser aplicada, a aceleração linear da extremidade da
roldana obedece a seguinte relação: a(t ) 4t . Sabemos que a R , onde é a aceleração
angular, e R é o raio do corpo rígido circular. O raio da roldana possui 0,2m, dessa maneira, podemos
encontrar a lei da aceleração angular:
(t )
a(t ) 4 t
20 t .
R
0,2
Para encontrarmos a função que descreve a velocidade angular, devemos integrar a relação que
encontramos anteriormente para a aceleração angular:
t2
(t ) (t ) dt 20 C 10 t 2 C .
2
A roldana parte do repouso, de modo que C 0 . Assim: (t ) 10 t 2 .
No instante 3s, teremos: 10 3 90rad/s .
2
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Exercício Proposto
Enunciado:
O corpo rígido possui um ponto A e um ponto B, e o vetor posição que liga os dois pontos é
RA/ B (1,0,1) e sua velocidade angular descrita pelo vetor (1,0,0) . Onde as unidades de grandeza
se encontram no Sistema Internacional (SI).
Resposta:
Como sabemos da teoria, o vetor velocidade tangencial da trajetória de um corpo rígido que possui vetor
posição R (Rx , Ry , Rz ) , e para frequência angular (x ,y ,z ) , é calculado da seguinte
maneira:
v R .
Para deduzir a relação anterior, basta realizar o produto vetorial R . Uma maneira simples de
visualizar o cálculo de um produto vetorial, é utilizando o cálculo de determinantes:
ex
R x
ey
ez
y
z (y Rz z Ry ,z Rx x Ry ,x Ry y Rx ) .
Rx
Ry
Rz
No caso do problema em questão, temos que:
ex
RA / B 1
1
ey
ez
0
0
0 (0, 1,0) .
1
Exercício Proposto
Enunciado:
Uma haste rígida tem dois pontos marcados A e B, e o vetor posição que liga A e B é dado por
RA/ B ( 1,1,2) e a haste gira com velocidade angular descrita pelo vetor (3,4,0) . Onde os
sistemas de unidade se encontram no SI.
Resposta:
Para calcular a aceleração normal de um corpo rígido, devemos utilizar a seguinte relação,
an ( R ) , e como sabemos, o produto vetorial é associativo, ou seja, devemos respeitar a
ordem da multiplicação. Para isso, precisamos primeiro calcular o produto vetorial que se encontra entre
parênteses:
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
ex
ey
ez
R x
y
z (y Rz z Ry ,z Rx x Ry ,x Ry y Rx ) .
Rx
Ry
Rz
Substituindo os valores das componentes dos dois vetores, encontramos que:
ex
ey
ez
RA / B 3
0 (8, 6,7) .
2
4
1 1
Agora podemos calcular o segundo produto vetorial
ex
an ( RA / B ) 3
8
ey
ez
4
6
0 (28, 21, 50) .
7
Exercício Proposto
Enunciado:
Uma haste rígida tem a posição de um ponto A em seu comprimento descrita pelo vetor
RA (1,1, 2) , e um vetor posição de um ponto B dado por RB ( 2,3,1) em relação a um
referencial fixo. A haste gira ao redor do ponto A com velocidade angular descrita por (1,0,4) . O
raio é dado em metros, e a velocidade angular em rad s 1 . Calcule o módulo da velocidade tangencial
do corpo rígido, e selecione a alternativa correta.
Resposta:
Como sabemos da teoria, o vetor velocidade tangencial da trajetória de um corpo rígido que possui vetor
posição R (Rx , Ry , Rz ) , e velocidade angular (x ,y ,z ) é calculado da seguinte maneira:
ex
v R x
ey
ez
y
z (y Rz zRy ,z Rx x Ry ,x Ry y Rx )
Rx
Ry
Rz
Antes precisamos calcular o vetor posição de A em relação a B:
RA/ B RB RA (2,3,1) ( 1,1, 2) ( 1,2,3) .
Calculando a velocidade:
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
ex
ey
v A / B RA / B 1 0
1 2
ez
4 ( 8, 7,2)
3
Dessa forma, a velocidade do corpo rígido é representada pelo vetor v A / B ( 8, 7,2) . E seu módulo é
v A/ B
8 7
2
2
22 64 49 4 117 10,817 m / s .
Exercício Proposto
Enunciado:
Descreva como a aceleração da gravidade varia de acordo com a latitude.
Resposta:
A equação de movimento em sua superfície é dada por:
a g ( R ) .
Onde g é a aceleração da gravidade devido à massa da Terra, dada por:
GM
g 2 T rˆ .
r
Onde G é a constante de Gravitação Universal, devido a Newton, MT é a massa da Terra, r é o módulo
do vetor posição, ou seja, a distância do centro da Terra até a posição descrita pelo vetor, e rˆ é um
versor, cuja direção é radial à Terra. Colocando em notação de componentes, a aceleração tem a
seguinte forma:
a gT 2 RT sen 2 rˆ 2 sen cos ˆ .
Onde é o ângulo entre o vetor posição (na direção radial) e o vetor frequência angular. Na superfície
da Terra, temos que gT
GMT
9,8 m s 2 , é a aceleração local da gravidade. O ponto
2
RT
fundamental deste exercício reside na correção devido à rotação da Terra, e na linha do Equador, temos
que sen 1, ou seja, a correção é dada por 2 RT 0,0339 m s 2 , isso quer dizer que na linha do
Equador, devido à rotação a aceleração da gravidade é menor.
Figura 1.17: Terra girando com frequência angular .
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Exercício Proposto
Enunciado:
Descrever a trajetória de um elétron se movendo em um campo magnético.
Resposta:
Um elétron entra em um campo magnético B (0,0, B ) , com uma velocidade v (v x , v y , v z ) .
Sabemos do eletromagnetismo que a força que esse elétron sente é dada pela Força de Lorentz
F q (v B ) , onde q é a carga do elétron. Calculando essa força, encontramos que
F (q B v y , q B v x ,0) . Para encontrar a equação de movimento, devemos aplicar a Segunda Lei
de Newton (Forças Resultantes), e resolver a seguinte equação diferencial:
dv
dv
dv
dv
m
F m x ,m y ,m z
dt
dt
dt
dt
q B
q B
vy ,
v x ,0
m
m
Essa equação diferencial possui a seguinte possível solução:
v (t ) (v 0 sen( t ),v 0 cos( t ),v 0 )
Onde v (t 0) v 0 é a velocidade no instante inicial, e
q B
é a frequência angular do
m
movimento, também conhecida pelo nome de frequência cíclotron. Integrando a relação da velocidade,
temos a seguinte função posição do elétron.
v
v
r (t ) 0 cos( t ), 0 sen( t ),v 0 t
Figura 1.18: Trajetória helicoidal de elétron em campo eletromagnético
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Aná lise do Movimento Absoluto
Em um corpo rígido, a distância entre quaisquer dois pontos sempre permanecerá
inalterada, independente de que tipo de movimento, ou força estiver atuando no corpo.
Estudaremos referenciais absolutos, analisando apenas os movimentos de translação
em relação a um observador fixo, ou de rotação em torno de um ponto fixo, o que resulta no
movimento geral do corpo rígido para referenciais absolutos, como pode ser visto na figura
1.9:
Figura 1.19: Exemplos de movimentos de corpos rígidos no plano
Translação: Esse tipo de movimento ocorre quando uma linha traçada entre dois pontos
do corpo permanece paralela durante o movimento, ou seja, o movimento para os dois pontos
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
são sempre paralelos. A translação pode ser retilínea como mostra o item (a) da figura 1.8, ou
curvilínea como mostra o item (b) da figura 1.19.
Rotação em eixo fixo: Quando um corpo rígido rotaciona em torno de um eixo fixo,
todos os pontos do corpo percorrem um movimento circular, exceto aquele que se encontra
preso ao eixo fixo do sistema, como mostra o item (c) da figura 1.19.
Movimento geral no plano: É o movimento resultante da combinação entre os
movimentos de translação que acontece em relação a um sistema fixo de coordenadas, e
rotação que acontece em torno de um eixo fixo no próprio corpo rígido, como mostra o item
(d) da figura 1.19.
Por sinal, agora é um excelente momento para introduzir uma nova notação para
versores. Faremos isso porque pode ser necessário trabalhar com diversos sistemas de
coordenadas, e não somente com as coordenadas cartesianas. Uma notação mais geral é
utilizar ê , seguido de um subscrito que representa a coordenada à qual ele se refere.
Por exemplo, utilizaremos eˆ x ao invés de iˆ , onde e representará o vetor direção, o
subscrito representará a coordenada ao qual se refere (no caso a direção x), e o chapéu
representa que o vetor é unitário (módulo igual a 1).
Quando falamos de translações, em relação a um referencial fixo, temos que, para um
vetor posição r (t ) x(t ) eˆ x y (t ) eˆy z(t ) eˆ z do centro de massa ou de qualquer outro ponto
de interesse de um corpo rígido. No caso eˆ x , eˆy , eˆz são os versores que formam a base do
espaço Euclidiano, ou seja, são três vetores que, combinados, permitem a construção de
qualquer outro vetor tridimensional. A velocidade é dada pela derivada da função posição em
relação ao tempo:
dr
dx
dy
dz
v
(t )
(t ) eˆ x
(t ) eˆy
(t ) eˆz .
dt
dt
dt
dt
A aceleração de um ponto do corpo rígido é dada pela segunda derivada da função
posição em relação ao tempo, ou seja, a derivada da velocidade em função do tempo:
dv d 2 r
d 2x
d 2y
d 2z
a
2 (t ) 2 (t ) eˆ x 2 (t ) eˆ y 2 (t ) eˆz .
dt dt
dt
dt
dt
A seguir, veja um exemplo de movimento absoluto no plano.
Exercício Proposto
Enunciado:
Lançamento Oblíquo de corpo rígido
Resposta:
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Na figura 1.20 podemos ver um corpo rígido no contexto de um lançamento oblíquo, onde o centro de
massa percorre a trajetória parabólica. O corpo rígido pode realizar movimentos mais complexos, como
por exemplo, girar, mas isso não afeta a trajetória do seu centro de massa.
Figura 1.20: Trajetória de um lançamento oblíquo representado no plano
O sistema de referências escolhido é gerado pelos versores ex , ey . A origem (0,0) se encontra em
repouso em relação à Terra. O corpo rígido, que pode ser uma bala de canhão, por exemplo, que foi
disparado em um teste, com uma velocidade v , em uma direção que faz um ângulo , em relação à
horizontal. As coordenadas são dadas pelas funções:
x(t ) x0 (v 0 cos ) t
y (t ) y 0 (v 0 sen ) t
1 2
gt .
2
As velocidades são dadas por:
vx
dx (t )
v 0 cos
dt
vy
dy (t )
v 0 sen gt .
dt
E as acelerações são dadas por:
ax
dv x d 2 x (t )
0
dt
dt 2
ay
dv y
dt
d 2 y (t )
g .
dt 2
Exercício Proposto
Enunciado:
A haste OA (de comprimento r) gira com velocidade angular constante , de modo que o ponto A gira
sobre o círculo, formando um ângulo com a horizontal, que inicialmente é zero. O segmento AB (de
comprimento l) acompanha o movimento do ponto A, onde o ponto B está sobre o centro de um
deslizador, que só pode se mover sobre o eixo x. Descreva os movimentos dos pontos A e B, ou seja,
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
determinar os vetores posição e velocidade no caso mais geral, como funções do tempo, e também sua
condição no instante inicial, no caso específico onde l 5m , r 1m , e que 0,2 rad / s .
Figura 1.21: Manivela que gira com velocidade angular constante presa a um deslizador.
Resposta:
Primeiramente, o engenheiro selecionou um sistema de referências fixo, com origem no centro da
manivela circular, com versores {eˆx , eˆy } , que dão as direções dos eixos.
O vetor posição do ponto A é pode ser encontrado através de relações geométricas, no círculo
trigonométrico. Na seção anterior revisamos como escrever um movimento circular com senos e
cossenos:
rA (t ) r cos( t ) eˆ x r sen( t ) eˆ y .
Note que no eixo x temos o comprimento de OC r cos( t ) e no eixo y temos o comprimento de
CA r sen( t ) .
Para determinar velocidades e acelerações do ponto A na manivela, e do deslizador em B, basta derivar
em relação ao tempo, os vetores posição:
dr
v A (t ) A (t ) r sen( t ) eˆ x cos( t ) eˆy .
dt
Agora precisamos determinar o vetor posição do deslizador B, e o engenheiro vai utilizar outras relações
geométricas, pois deve determinar a distância entre a origem e o deslizador B, portanto OB OC CB .
Vimos que OC r cos( t ) .
O comprimento CB pode ser determinado pelo teorema de Pitágoras. Observe novamente o desenho
1.12. Podemos desenhar um triângulo formado pela haste AB (hipotenusa), e os catetos CB e CA .
2
2
2
Portanto, o teorema mostra que AB CB CA .
Sabemos que CA r sen( t ) e que AB l , então:
2
l 2 CB r 2 sen 2 ( t ) , de onde tiramos que:
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
CB l 2 r 2 sen 2 ( t ) .
E agora temos em mãos todas as informações necessárias para descrever o vetor posição para o
deslizador B:
rB (t ) OC CB r cos( t ) l 2 r 2 sen 2 ( t ) eˆ x .
Derivando a relação acima, encontramos que:
dr
1 r 2 sen(2 t )
v B (t ) B (t ) r sen( t )
eˆ x .
dt
2 L2 r 2 sen 2 ( t )
Quando pensamos em rotações, utilizamos as já conhecidas equações de movimento
circular. Na figura 1.11, podemos ver um corpo rígido em formato de disco, girando no plano.
Tomamos um ponto em sua borda, e vamos escrever as equações de movimento para o ponto.
A posição angular é definida pelo ângulo formado pelo vetor posição
r (t ) x(t ) ex y (t ) ey com o eixo horizontal, e para descrever movimento circular, utilizou o
conceito de deslocamento angular (t ) , e definimos a velocidade angular (t ) como a taxa
de variação do deslocamento angular em relação ao tempo, dado pela seguinte relação:
(t )
d
(t ) .
dt
Lembrando que podemos representar a derivada temporal por um ponto, ou seja,
podemos representar a velocidade angular por (t )
d
(t ) (t ) . Da mesma forma,
dt
podemos definir a aceleração angular (t ) , em relação à segunda derivada do deslocamento
angular, em relação ao tempo da seguinte forma (usando também notação de ponto para
derivada temporal):
(t )
d d 2
2 (t ) (t ) .
dt
dt
Figura 1.21: Movimento circular de corpo rígido
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Na figura 1.11 vemos o vetor posição r (t ) , a velocidade tangencial v (t ) , a aceleração
centrípeta (ou radial) a(t ) , e o deslocamento circular s(t ) .
Da mesma forma que descrevemos os movimentos de um ponto em relação a um
referencial fixo, podemos descrever os movimentos de um referencial que se move em relação
a um referencial fixo! Supondo um raio vetor r r cos eˆ x r sen eˆy qualquer, onde
eˆ , eˆ
x
y
são os versores de nosso referencial fixo, e esse raio vetor parametriza um
movimento circular, exatamente como é mostrado na figura 1.10. Podemos definir um
referencial móvel eˆr , eˆ a partir do vetor posição, da seguinte forma:
eˆr
r
r
ˆ
ˆ
ˆ
cos ex sen ey , e
r sen eˆx r cos eˆy .
r
A seguir veja outro exemplo de aplicação dos conceitos que apresentamos até então:
Exercício Proposto
Enunciado:
Na figura 1.22 vemos duas engrenagens, que se encontram encaixadas, e fazem parte de um mecanismo.
As duas engrenagens se movem juntas, pois quando uma gira transfere seu movimento para a outra.
Figura 1.22: Duas engrenagens girando.
Chamaremos as duas engrenagens de A e B, sendo que elas possuem raios distintos RA e RB , iremos
determinar a relação entre as frequências angulares A e B . Verificando as especificações do
mecanismo, você verificou que a engrenagem A possui um raio de R A 0,25m e que a engrenagem B
possui um raio RB 0,5m .
Resposta:
Como as engrenagens estão em contato, e supondo que giram sem deslizar, então a velocidade
tangencial na extremidade é igual para as duas, ou seja, temos que v A v B , utilizando a relação da
velocidade tangencial, v Re , onde e é o versor que dá a direção da velocidade, temos que
A R A eA B RB eB , e temos a seguinte relação entre os versores direção eA eB , isso quer dizer que
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
uma engrenagem se move no sentido horário, e a outra se move no sentido anti-horário, daí o sinal
negativo, para indicar sentidos diferentes. Temos a seguinte relação entre as frequências angulares:
A
R
B .
B
RA
Ou seja, se a engrenagem B se move no sentido horário com uma velocidade angular , então a
engrenagem A se move no sentido contrário (anti-horário), com velocidade angular que obedece a razão
entre seus raios. Dessa forma, o engenheiro calcula a relação entre as frequências angulares das duas
engrenagens:
A
R
0,5
B
2 .
B
RA
0,25
Exercício Proposto
Enunciado:
Na figura 1.23, vemos um sistema de deslizadores (A e B), conectados por uma barra rígida de
comprimento L AB . O deslizador B se move em uma cunha com angulação , enquanto que o
deslizador A se move horizontalmente. Determine a velocidade angular da barra, em função da posição
linear x A do deslizador A.
Figura 1.23: Sistema de deslizadores
Resposta:
Vamos analisar o problema de forma geométrica. Note que o deslizador B se move sobre a cunha,
com um ângulo com a horizontal. E o deslizador A se move horizontalmente. Dessa forma, podemos
enxergar um triângulo, considerando o comprimento da barra, o deslocamento do deslizador A, e o
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
deslocamento do deslizador B, ou seja, existe um vínculo entre os movimentos dos deslizadores, e da
barra. Podemos obter a relação entre esses movimentos, a partir de semelhança de triângulos, utilizando
a lei dos senos, podemos encontrar que:
xA
L
L
xA
sen .
sen sen
sen
Onde o ângulo é aquele considerado entre a barra e o deslocamento do deslizador B, ou seja,
a função de posição angular da barra, que queremos determinar. A partir da relação anterior, temos o
deslocamento de A em função da posição angular da barra. Note que a posição x A do deslizador A varia
com o tempo, ou seja, é uma função do tempo, x A x A (t ) . Como mencionamos anteriormente, os
movimentos da barra e dos dois deslizadores possui um vínculo, que acabamos de encontrar, ou seja,
podemos descrever o movimento da barra em relação a algo que conhecemos, e conseguimos medir
facilmente, a posição do deslizador A, através da função x A x A (t ) . Podemos inverter a relação
encontrada, e definir a posição angular como uma função dos dados do problema:
sen
x A ( t ) .
L
(t ) arcsen
Note que encontramos uma fórmula para a posição angular em função do tempo, (t ) . Para
encontrar a velocidade, devemos derivar a função , mas uma maneira mais fácil de calcular, é
L
simplesmente derivar x A (t )
sen
sen (t ) , em relação ao tempo, em ambos os lados da
igualdade. Assim, temos que:
L
v x A
cos .
sen
Lembrando-se da primeira relação, temos que
cos 1 sen 2 1
x A 2 sen 2
.
L2
E inserindo na fórmula que derivamos em relação ao tempo, temos que:
L
v x A
sen
x A 2 sen 2
1
L2
Dessa forma, finalmente chegamos a velocidade angular da barra, em função da posição linear
x A do deslizador A:
( x A )
v sen
L x A 2 sen 2
2
.
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Aná lise do Movimento Relativo
Vimos na seção anterior como trabalhar com referenciais fixos em relação à Terra, e
como descrever movimentos de corpos rígidos nesses referenciais. Nesta seção vamos
trabalhar com referenciais que se movem de forma acelerada, ou transladando, ou
rotacionando.
Figura 1.24: O sistema S ( x , y , z) é fixo, e o sistema S ( x, y , z ) gira.
Na figura 1.24, vemos um exemplo de movimento relativo, onde um sistema está fixo no
espaço, e o outro gira em torno de um eixo. O vetor R é o vetor posição da origem do sistema
girante em relação ao sistema fixo. O vetor r ' descreve o movimento de um corpo rígido que
se move no sistema S , mas sob a visão de um observador no sistema S . O vetor r descreve
o movimento do mesmo corpo, mas sob o ponto de vista de um observador no sistema S .
Em seções anteriores era comum utilizarmos a notação ( x, y , z ) para representarmos
vetores em três dimensões, mas vamos introduzir uma nova notação para simplificar cálculos
com vetores. Vamos utilizar a notação de índices. Dessa forma ( x, y , z ) se torna ( x1, x2 , x3 ) .
Essa notação apesar de não parecer tão clara a princípio, ajuda muito a denotar somatórios,
que serão muito utilizados daqui pra frente, por exemplo:
3
r xi ei x1e1 x 2e2 x3e3 .
i 1
Equação geral de movimento
Vamos deduzir a equação de movimento para um corpo rígido que se encontra em um
referencial que rotaciona, e descrever seu movimento para um referencial fixo. Vamos usar o
índice f o referencial fixo (referencial S ), e R o referencial que rotaciona (referencial S ).
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Da figura 1.24, temos r ' r R (observe que aqui o r ' não significa a derivada do
vetor, mas outro sistema de coordenadas), derivando estes vetores em relação ao tempo,
encontramos que:
d r ' dr dR
.
dt f dt f dt f
Note que estamos derivando o vetor r pertencente ao referencial S , mas em relação
dr
ao referencial S . Precisamos representar
dt em relação ao referencial ao índice R. O
f
dr
corpo rígido tem velocidade
, em relação ao sistema S .
dt R
dr dr
dt dt r .
f R
Onde é a velocidade angular, e r o vetor posição que vai da origem do referencial S
até o corpo rígido. Dessa forma, temos que:
d r ' dR dr
r .
dt f dt f dt R
Que podemos escrever da seguinte forma:
vf V vR r .
Que tal refletirmos um pouco sobre esses resultados que obtivemos até agora? Vamos
assimilar algumas definições.
Assimilando Conceitos
Temos as seguintes definições:
dr '
vf
dt , é a velocidade relativa em relação ao sistema fixo.
f
dr
v R , é a velocidade relativa em relação ao sistema girante.
dt R
dR
V
Rf , é a velocidade linear relativa, em relação à origem que se move.
dt
f
r , é a velocidade devido à rotação do sistema girante, que gira com velocidade angular .
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Derivando v f V v R r em relação ao tempo, temos:
dv f dVf dv R d
dt dt dt dt r .
f
f
f
Vamos analisar a derivada
d
r com cuidado.
dt
Assimilando Conceitos
O movimento de rotação do referencial S possui a mesma velocidade angular no referencial S ' .
Dessa forma, temos:
d
d d
dt dt dt .
f
R
d
r , temos que:
dt
d
d dr
r dt r dt .
dt
f
d
dr
Podemos definir que
, e lembrando que
v R r , temos:
dt
dt f
Utilizando a regra da cadeia em
d
r r v R r .
dt
Aplicando a propriedade distributiva em vetores, temos finalmente:
d
r r v R r .
dt
Temos então:
dv f dV dv R
dt dt dt r v R r .
f
f
f
dv R
Agora temos que escrever
no referencial S
dt f
dv R dv R
dt dt v R .
f
R
Temos então:
dv f dV dv R
v
r
v
r .
R
R
dt dt dt
f
R
f
Que pode ser escrita na seguinte forma:
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
af Rf aR 2 v R r r .
Chegamos finalmente ao resultado mais importante dessa seção. Obtivemos a equação
geral de movimento para um corpo rígido em um referencial acelerado S , em relação a um
referencial fixo S ' . Vamos refletir um pouco sobre as novas definições que fizemos:
Assimilando Conceitos
dv R
aR
é a aceleração medida no referencial S (girante).
dt R
dv f
af
, é a aceleração medida no sistema de referências S ' (fixo).
dt f
dV
Rf
, é a aceleração linear da origem do referencial S em relação ao referencial S ' .
dt
f
Forças Newtonianas e Forças não inerciais:
Podemos multiplicar dos dois lados da equação de movimento, pela massa do corpo
rígido, e definir F m af , e Fefetiva m aR . De forma que:
Fefetiva F m Rf 2 m v R m r m r .
As leis de Newton são válidas somente em referenciais inerciais, que estejam fixos, ou se
movendo com velocidade constante em relação à Terra. Em referenciais inerciais, as forças são
ditas Newtonianas, e F representa todas as forças Newtonianas atuando no corpo rígido.
Quando o referencial se move de forma acelerada, ou transladando, ou girando, ou a
composição desses dois movimentos, temos a presença de forças chamadas Não Newtonianas:
Fefetiva (Forças Newtonianas ) (Forças não Newtonianas )
Vamos analisar as forças não Newtonianas uma a uma:
m Rf : É uma força que um observador no referencial S ' descreve no corpo
rígido, tendo como causa o movimento de translação acelerado do referencial
S . Que tal analisarmos um exemplo a seguir?
m r : É uma força que um observador no referencial S ' descreve no
corpo rígido, tendo como causa o movimento de rotação do referencial S .
m r : É uma força que um observador no referencial S ' descreve
no corpo rígido, tendo como causa o movimento de rotação do referencial S . É
conhecida como força centrífuga. Essa força possui módulo igual a m 2 r ,
sendo que é perpendicular ao raio vetor r . O sinal negativo da força
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
centrífuga significa que a força está no sentido para fora do movimento de
rotação, no sentido contrário da força centrípeta.
2 m v R : É conhecida como força de Coriolis.
Exercício Proposto
Enunciado:
Na figura 1.25 temos um carrinho, e em seu interior tem um pêndulo, formado por uma esfera de massa
m, presa por um fio inextensível ao teto do carrinho. Quando o carrinho está parado, o fio fica na
vertical, e a força peso é igual à força de tração no fio, mas quando o carrinho se move horizontalmente
com aceleração constante ac , o pêndulo oscila no sentido contrário à aceleração! Temos então uma
força não inercial m ac atuando no pêndulo, fazendo com que o fio do pêndulo faça um ângulo
com a vertical.
Figura 1.25: Ilustração de um carrinho que se move horizontalmente com aceleração constante.
Resposta:
Podemos encontrar o ângulo o pêndulo faz com a vertical, em função dos dados do problema.
Podemos escolher um referencial fixo em relação à Terra, e tratar o carrinho como o referencial
acelerado. Como o carrinho não gira, temos que 0 , e a equação geral de movimento:
Fefetiva F m Rf .
As forças Newtonianas atuando no pêndulo são apenas a força peso mg e a tração T . Em termos do
referencial fixo formado pelos versores ex , ey , a força peso é vertical mg mg ey . Através de
considerações geométricas, podemos decompor a tração, em função do ângulo que faz com a vertical:
T T sen ex T cos ey .
Onde T é o módulo da tração. A força não inercial que surge pela aceleração do carrinho em um
movimento retilíneo, é dada por m Rf m ac ex . Como supomos que o pêndulo fica parado
fazendo ângulo com a vertical, isso significa que a força efetiva precisa ser nula:
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Fefetiva F m Rf 0 .
Dessa forma, encontra-se que:
F m Rf T m g m Rf
T sen ex T cos ey m g ey m ac ex .
Agrupando os termos nas devidas direções (versores):
m ac T sen ex T cos m g ey
0.
De onde tiramos duas relações m ac T sen e m g T cos , e dividindo uma pela outra,
encontramos que:
m ac T sen
.
m g T cos
Simplificando a relação anterior, chegamos ao resultado:
tg
ac
.
g
Vamos mostrar agora um exemplo de aplicação da força centrípeta:
Exercício Proposto
Enunciado:
Em um laboratório de física experimental, para a graduação em engenharia, o professor está realizando
um experimento, para ilustrar o que são referenciais não inerciais. O experimento consiste em colocar
um pequeno disco circular, na superfície de um carrossel, a uma distância r do centro do carrossel. E
descrever o movimento do disco no referencial não inercial, girante (carrossel).
Considere o atrito entre a superfície do carrossel e o disco como sendo 0,5 , e que o carrossel gira
com velocidade angular constante de módulo 2 rad / s 1 . Calcule a máxima distância r que o disco
pode ser colocado, sem que deslize, devido à rotação do carrossel. (Considere g 0 10 m / s 2 ).
Resposta:
Sabemos da teoria de dinâmica de corpos rígidos, que a equação da força efetiva é dada pela seguinte
relação:
Fefetiva F m Rf 2 m v R m r m r .
Considerando o referencial fixo como o solo, e o referencial não inercial como sendo o carrossel, o
centro seria a origem do sistema, que permanece fixa, sem transladar. Como a velocidade angular é
constante, isso significa que 0 m r 0 . Como o centro do carrossel está fixo, isso significa
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
que Rf 0 m Rf 0 , e temos que v R 0 2 m v R 0 . Dessa forma, as únicas forças
atuando no disco são força de atrito, e
força centrífuga. A força de atrito é dada pela relação
F m g0 er , er é um versor que tem a direção radial, a partir do centro do carrossel. O raio vetor
direção do disco é dado por r r er , e a velocidade angular é dada por ez , onde ez é um
versor que tem a direção perpendicular à superfície do carrossel, a partir de seu centro. Assim, temos
que a força centrífuga é dada por:
r ez ez r er
2 rez ez er
2 r ez e
2 r er .
E a equação da força efetiva toma a seguinte forma:
Fefetiva F m r
m g 0 er m 2 r er .
m g0 2 r er .
O problema nos pergunta a distância máxima, do centro do carrossel, para que o disco permaneça
parado, devido ao atrito, assim devemos impor que Fefetiva 0 , que nos dá a seguinte condição, para
que o disco fique parado:
Fefetiva m g 0 2 r er 0
r
g0
.
2
Agora, vamos finalmente calcula o valor do raio:
r
g 0 0,5 10
1,25 m .
2
22
Centro instantâneo de velocidade nula
O centro instantâneo de velocidade nula, ou centro instantâneo de rotação é definido
como um ponto fixo (ou referencial) em um corpo rígido, em movimento planar, que possui
velocidade nula em um determinado instante de tempo. Neste instante, os vetores
velocidades de outros pontos do corpo rígido geram um campo de força circular em torno
desse centro instantâneo que é idêntico ao que seria gerado por um movimento de pura
rotação.
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Um exemplo na figura 1.26, vemos a ilustração de uma roda de um carro, que se move
para a direita com velocidade constante V. A roda possui raio de comprimento R, e o ponto A é
seu centro. O ponto C na roda pode ser escolhido como o centro instantâneo de rotação. No
instante em que a figura mostra a roda, as velocidades tangenciais dos pontos B, D, E é como
se estivessem percorrendo uma trajetória circular, independentemente de a roda estar
girando ou não.
Figura 1.26: Ilustração de uma roda de um carro, com cinco pontos distintos.
Exercício Proposto
Enunciado:
Na figura 1.27, vemos a ilustração de uma haste de comprimento L BA . No ponto A, a haste está
conectada a um deslizador, que se move sem atrito. No ponto D, a haste está conectada a outra haste
fixa, de comprimento ED 120 mm . Sabendo que neste instante, a velocidade do deslizador A tem
módulo igual a v A 900 mm / s .
(a) Calcule a velocidade angular que a haste ADB, no instante mostrado na figura.
(b) Analisando os dados do problema, encontre a razão entre os módulos dos vetores posição rD / A ,
o segmento que liga o ponto D ao ponto A, e rB / A , ou seja, o segmento que liga o ponto B ao
ponto A.
Figura 1.27: Sistema haste + deslizador.
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
Resposta:
(a) Resposta comentada: Primeiramente, vamos definir um referencial fixo, que se encontra parado em
relação ao chão. A direção horizontal e a vertical são respectivamente denotadas pelos versores
e , e . Dessa forma, a velocidade do ponto A, é denotada por v
x
y
A
900 mm / s ex . O outro
referencial que escolheremos, será móvel, tendo sua origem localizada no ponto D, notando que este
referencial se move, em relação ao ponto A, e ao referencial fixo. Vamos determinar o vetor posição
rD / A , que liga o ponto D ao ponto A. Pela figura 1.27, podemos ver que a distância horizontal é dada por
80mm , enquanto que a distância vertical é dada por 150mm , ou seja, é o segmento:
rD / A DA (0,0) (80,150) 80 ex 150 ey .
Segundo a teoria, a equação de velocidade para a haste ABD é dada pela relação:
v D v A v D / A v A D / A rD / A .
Primeiramente, vamos calcular D / A rD / A , onde a incógnita de nosso problema é a velocidade
angular de D em relação a A, ou seja, D / A (0,0,D / A ) D / A ez , lembrando que a velocidade angular
é um vetor sempre apontando para fora, ou para dentro da folha de papel (ou tela do computador),
dependendo da orientação do giro do corpo rígido. Aponta para fora, quando o giro é no sentido horário,
e para dentro, quando o giro é no sentido anti-horário:
ex
ey
ez
0
D / A D / A 150 ex 80 ey .
80 150
0
D / A rD / A 0
O ponto D se movimenta apenas na vertical, já que está conectado à outra haste rígida e fixa.
Dessa maneira, temos que a velocidade em D é dada por v D v D ey . Inserindo as relações encontradas
na equação geral da velocidade para o ponto D, temos que:
Autor: Osvaldo Luiz dos Santos Pereira ([email protected])
v D v A D / A rD / A ,
0 ex v D ey 900 ex 150 D / A ex 80 D / A ey ,
0 ex v D ey 900 150 D / A ex 80 D / A ey .
Para que a igualdade seja verdadeira, devemos igualar as componentes:
900 150 D / A 0
.
80 D / A v D
Da primeira relação, encontramos que D / A 900 / 150 6 rad / s .
(b) do item (a), encontramos que:
rD / A DA (0,0) (80,150) 80 ex 150 ey
.
Da mesma forma, vamos proceder para encontrar o vetor rB / A BA . Agora vamos utilizar um
pouco de geometria, mais precisamente semelhança de triângulos. Note que temos um triângulo
retângulo de hipotenusa AD, altura 150mm , e base 80mm . E temos também um triângulo de
hipotenusa BA, e altura (60 150)mm 210mm , por semelhança de triângulos:
rD / A rB / A
210
rB / A
rD / A .
150 210
150
Dessa forma, tirando o módulo, encontramos que:
rB / A 210
1,40 .
rD / A 150