étodos
uméricos
SISTEMAS DE EQUAÇÕES LINEARES
Prof. Erivelton Geraldo Nepomuceno
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
CENTRO FEDERAL DE EDUCAÇÃO
TECNOLÓGICA DE MINAS GERAIS
DIRETORIA DE PESQUISA E PÓS-GRADUAÇÃO
UNIVERSIDADE DE JOÃO DEL-REI
PRÓ-REITORIA DE PESQUISA
2016
Conteúdo
1. Conceitos fundamentais
2. Métodos diretos para resolução de SL:
Métodos para resolução de SL triangulares
Método de eliminação de Gauss
Método de decomposição LU
Decomposição de Cholesky
Decomposição espectral
3. Inversão de matrizes através de métodos diretos
4. Métodos iterativos para resolução de SL
Método iterativo de Jacobi–Richardson
Método iterativo de Gauss – Seidel
5. Análise de erros na solução de SL
6. Cálculo de autovalores e autovetores
2
Introdução
A solução de um sistema de equações lineares algébricas é um dos
processos numéricos mais utilizados para simular situações reais. É uma
etapa fundamental na solução de problemas que envolvem por exemplo:
Equações diferenciais parciais
Otimização
Regressão
Sistemas não lineares
Equações integrais
É muito importante a escolha e implementação de um método eficiente
para solução do SL devido principalmente da dois fatores:
Esforço computacional requerido (tempo/memória)
Precisão dos resultados
Uma equação é linear se cada termo contém não mais do
que uma variável e cada variável aparece na
primeira potência.
3
Conceitos Fundamentais
4
Conceitos Fundamentais
Matriz é um conjunto de elementos dispostos em forma
retangular.
O tamanho de uma matriz é determinado pelo seu número de linhas
e colunas. Uma matriz com m linhas e n colunas é dita m x n.
Os elementos podem ser números, expressões ou outras matrizes.
Os elementos de uma matriz são delimitados por colchetes ou
parênteses e são referenciados por dois índices, o primeiro indica
a linha e o segundo a coluna.
5
Conceitos Fundamentais
Formas de Matrizes:
Matrizes com determinados formatos e elementos frequentes:
Coluna A(mx1):
Nula: A(mxn) aij=0, i, j
a11
a
21
am1
Linha A(1xn):
a11
Diagonal: A(mxn) dij=0, ij
d11
0
0
0
0
d 22
0
0
0
0
d 33
0
0 0 0
0 0 0
0
0
0
0
0
0
d mn
a12 a1n
Identidade: A(mxn) eij=1, i=j e eij=0, ij
1
0
0
0
0 0 0
1 0 0
0 1 0
0 0 1
6
Conceitos Fundamentais
Formas de Matrizes:
Triangular inferior: A(mxn) dij=0, i<j
d11
d
21
d 31
d m1
0
0
d 22
d 32
0
d 33
dm2
dm3
Densa: (5x5)
1 4 0 8 9
5 3 5 6 12
4 0 7 1 2
21
16
11
3
9
7 3 6 18 0
0
0
0
d mn
Triangular superior: A(mxn) dij=0, i>j
d11 d12
0 d
22
0
0
0
0
Esparsa: (5x5)
1
0
0
0
0
0 0 8 0
3 0 0 0
6 1 9 0
3 1 0 8
0 0 2 1
d13 d1n
d 23 d 2 n
d 33 d 3n
0 d mn
Simétrica dij= dji0, i,j A=AT
3
1
0
4
1 0 4
9 5 2
5 8 6
2 6 7
7
Conceitos Fundamentais
Operações Matriciais:
Transposição:
5
6
A 3
7
1
2 0
9 1
4 2
0 8
5 6
5 6 3 7 1
AT 2 9 4 0 5
0 1 2 8 6
Uma matriz complexa é Hermitiana se ela é igual aos seu complexo
cinjugado transposto.
Adição/Subtração: (Matrizes devem ter as mesmas dimensões)
2 5
0 8
2 13
A
B
A
B
2 3
10 9
8 6
2 3
A B
6 3
8
Conceitos Fundamentais
Operações Matriciais:
Multiplicação por escalar: (resulta em matriz de mesma dimensão)
2 5
A
8 6
10 25
5A
40 30
Multiplicação por matriz: (o número de colunas de A(m1xp) deve
ser igual ao número de linhas de B(pxn2) sendo AxB=C(m1xn2):
p
Cij aik bkj , i 1,2,..., m1
k 1
2 1 0
A
3
5
6
1 6
B 4 0
3 5
j 1,2,..., n2
6 12
AB
41
48
9
Conceitos Fundamentais
Operações Matriciais:
Produto interno e externo: multiplicação de vetores que resulta em
um escalar ou uma matriz.
10
Conceitos Fundamentais
Operações Matriciais:
Determinante: Uma matriz quadrada de ordem n tem um número
associado chamado determinante:
A a11 det( A) a11
a11
A
a21
a11
A a21
a31
a12
det( A) a11a22 a21a12
a22
a12
a22
a32
a13 det( A) a11 a22 a33 a32 a23
a23
a12 a21a33 a31a23
a33
a13 a22 a32 a31a22
Se det(A) = 0 matriz é singular (não tem inversa).
11
Conceitos Fundamentais
Operações Matriciais:
Posto
Um conjunto de vetores {v1, v2, ...,vn} é dito linearmente dependente
se existirem escalares 1, 2, ..., n não todos nulos, tais que:
1v1 2 v2 n vn 0
Os vetores v1, v2, ...,vn são linearmente independentes se a igualdade é
verificada somente para todos os escalares 1, 2, ..., n nulos.
Posto de uma matriz A é o número máximo de vetores linha ou coluna
de A que são linearmente independentes.
Linhas 2 e 4 obtidas pela
combinação linear das linhas 1 e 3:
L2=L1+L3 L4=2L1-L3
Posto(A)=2.
12
Conceitos Fundamentais
Operações Matriciais:
Traço: O traço de uma matriz quadrada é definido como a soma
dos elementos da sua diagonal principal.
n
traço A aii
i 1
13
Conceitos Fundamentais
Operações Matriciais:
Inversa: A inversa de uma matriz quadrada A de ordem n A-1 é:
Sendo In a matriz identidade de ordem n. Observa-se que a lei
comutativa existe para o produto de uma matriz por sua inversa.
14
Conceitos Fundamentais
Operações Matriciais:
Algumas operações:
Se
, então
e
15
Conceitos Fundamentais
Autovalores e Autovetores:
Seja a matriz:
Tal que:
▪ A Matriz A possui um autovalor = 2 e um correspondente
autovetor v = [1 2]T .
▪ Também e verdade para = 4 e v = [2 3]T .
▪ A matriz de ordem n possui n autovalores e n autovetores.
▪ Relação fundamental:
Av v
16
Conceitos Fundamentais
Autovalores e Autovetores:
O problema do autovalor é encontrar a solução não trivial (não nula) do
sistema homogêneo:
A I v 0
▪ Teorema: Se M for uma matriz de ordem n, então o sistema
homogêneo My = 0 tem solução não trivial se, e somente se, M
for singular.
▪ Pelo teorema e sabendo que uma matriz singular tem
determinante nulo então:
det A I 0
17
Conceitos Fundamentais
Autovalores e Autovetores:
Exemplo:
1 = 2 e 2 = 4
18
Conceitos Fundamentais
Autovalores e Autovetores:
Polinômio Característico:
▪ O Polinômio Dn() de grau n é o polinômio característicos de A.
▪ Os n zeros i são autovalores de A.
▪ Expandindo o determinante para n = 3 tem-se:
19
Conceitos Fundamentais
Autovalores e Autovetores:
Polinômio Característico:
Relações de Girard (relações entre raízes e coeficientes de uma
equação algébrica):
20
Conceitos Fundamentais
Autovalores e Autovetores:
Duas importantes propriedades são obtidas:
Soma dos elementos da diagonal principal é igual a soma dos
autovalores:
Determinante de uma matriz é igual ao produto dos seus
autovalores:
Isso mostra que uma matriz singular tem, no mínimo, um
21
autovalor nulo.
Conceitos Fundamentais
Autovalores e Autovetores:
Exemplo:
Uma matriz com elementos reais tem seu polinômio
característico com coeficientes reais.
Uma matriz com elementos reais tem autovalores reais e/ou
complexos conjugados em pares.
22
Conceitos Fundamentais
Autovalores e Autovetores:
Exemplo: Calcular os autovalores da matriz:
Polinômio característico:
Zeros do polinômio característico:
O processo de calcular os
autovalores por intermédio
da determinação dos zeros
do polinômio característico,
apesar de ser simples, é
ineficiente
em
termos
computacionais.
Existem
outros
métodos
mais
eficientes.
23
Conceitos Fundamentais
Autovalores e Autovetores:
Outras Propriedades dos Autovalores:
1. Considerando que det(A) = det(AT ), então os autovalores de
A, representados por (A), são iguais a (AT ).
2. Se A for uma matriz triangular de ordem n:
det(A- I)=(a11- )(a22- ) ... (ann- ) = 0
Logo os autovalores de uma matriz triangular ou diagonal são
iguais aos elementos da diagonal principal.
3. O posto de matriz quadrada e igual ao numero de
autovalores não nulos.
24
Conceitos Fundamentais
Autovalores e Autovetores:
Outras Propriedades dos Autovalores:
4. Se i são os autovalores de A, então i-1 são os autovalores
de A-1 por porque :
25
Conceitos Fundamentais
Normas:
É o termo utilizado para expressar magnitude (número real não
negativo) de um vetor ou de matriz. O conceito de norma é
estreitamente ligado ao de comprimento do vetor.
As normas vetoriais são definidas em termos da norma-p. Assim
para um vetor x de tamanho n tem-se:
Norma-1 ou norma de soma de magnitudes
26
Conceitos Fundamentais
Normas:
Norma-2 ou norma Euclidiana
Norma- ou norma de máxima magnitude
27
Conceitos Fundamentais
Normas:
Condições das normas vetoriais:
▪
Uma Norma vetorial é uma função
que associa
um numero real a cada vetor e que satisfaz as condições:
e
se, e somente se,
são vetores e
é um escalar
28
Conceitos Fundamentais
Normas:
Exemplo: Calcular as normas 1, 2 e do vetor:
29
Conceitos Fundamentais
Normas:
Normas matriciais:
Norma-1 ou norma de soma máxima de coluna
Norma- ou norma de soma máxima de linha
Norma de Frobenius
30
Conceitos Fundamentais
Normas:
Norma-2 ou norma espectral
▪ max é o maior autovalor de A em modulo
▪ max e o maior valor singular de A, ou seja, raiz quadrada
do maior autovalor em modulo da matriz ATA).
31
Conceitos Fundamentais
Normas:
Condições das normas matriciais:
e
se, e somente se,
A e B são matrizes de mesma ordem e k e um escalar.
32
Conceitos Fundamentais
Normas:
Exemplo: Calcular as normas 1, , F e 2 da matriz:
33
Conceitos Fundamentais
Sistemas de equações lineares:
Conjunto de m equações polinomiais com n variáveis xi de grau 1:
Forma matricial:
▪
Ou simplesmente Ax = b, onde A é a matriz dos coeficientes, x é o
vetor solução e b é o vetor dos termos independentes.
▪
Se A for uma matriz quadrada (nxn) não singular:
Ax = b A-1Ax = A-1b x = A-1b.
34
Conceitos Fundamentais
Sistemas de equações lineares:
Classificação dos SL segundo a forma da matriz de coeficientes:
▪
Sistema sobredeterminado: tem-se mais equações do que incógnitas,
ou seja, A(mxn) m n e posto(A)=n.
▪
Sistema subdeterminado: existem mais incógnitas do que equações,
ou seja, m < n e posto(A) = m.
Sistema não tem solução ou existe um número infinito de soluções
que satisfaça Ax=b.
▪
Situação mais comum é quando m = n, matriz de coeficientes é
quadrada. Resolver o sistema é encontrar as n incógnitas que
satisfaçam as n equações.
35
Conceitos Fundamentais
Sistemas de equações lineares:
Classificação dos SL segundo o número de soluções:
O número de soluções depende do determinante da matriz
dos coeficientes.
▪
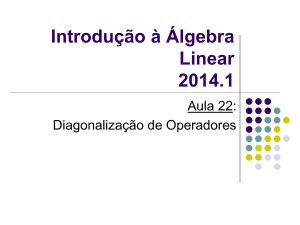
Única solução: det(A) 0. Geometricamente, a solução de uma
sistema linear de ordem n é um ponto no n comum aos n
hiperplanos descritos por cada uma das n equações, ou seja, o
ponto que satisfaz simultaneamente às n equações. Por exemplo:
Vetor solução x é a interseção dos três planos descritos por cada uma
das três equações. X =[5 1 10]T e det(A) = 251 0.
36
Conceitos Fundamentais
Sistemas de equações lineares:
37
Conceitos Fundamentais
Sistemas de equações lineares:
▪
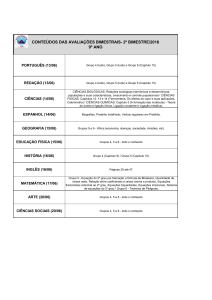
Infinitas soluções: det(A) = 0. No exemplo a seguir o sistema admite
infinitas soluções uma para cada valor de .
Geometricamente no sistema com det(A) = 0, os três planos se
interceptam em uma linha reta:
38
Conceitos Fundamentais
Sistemas de equações lineares:
39
Conceitos Fundamentais
Sistemas de equações lineares:
▪
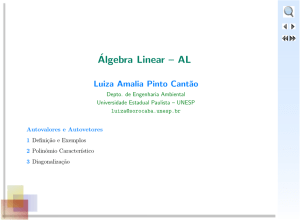
Sem solução: det(A) = 0.
Neste caso geometricamente no sistema com det(A) = 0, os três
planos nunca se interceptam simultaneamente, ou seja, o sistema não
admite solução:
40
Conceitos Fundamentais
Sistemas de equações lineares:
41
Conceitos Fundamentais
Sistemas de equações lineares:
Solução:
Existem duas grandes classes de métodos para resolução de
sistemas lineares:
▪
Métodos diretos: solução obtida com número finito de
operações aritméticas. Exemplos de métodos diretos:
▪
▪
▪
▪
▪
Sistemas triangulares
Eliminação de Gauss
Decomposição LU
Decomposição de Cholesky
Métodos iterativos: solução exata obtida somente com número
infinito de operações, é estabelecido um erro aceitável.
42
Conceitos Fundamentais
Sistemas de equações lineares:
Solução:
Os métodos diretos, em princípio, desprezando os erros de
arredondamento, produzem uma solução, se houver, em um número
finito de operações aritméticas. Um método iterativo, por outro
lado, requerer, em geral, um número infinito de operações
aritméticas para produzir a solução exata. Assim, um método
iterativo tem um erro de truncamento e o direto não tem. Por
outro lado, em sistemas de grande porte os erros de
arredondamento de um método direto podem tornar a solução sem
significado, enquanto que nos métodos iterativos os erros de
arredondamento não se acumulam. Entretanto, ambos são úteis,
tem vantagens e limitações.
43
Conceitos Fundamentais
Sistemas de equações lineares:
Sistemas equivalentes:
São sistemas de equações lineares que possuem o mesmo vetor
solução:
44
Métodos diretos para
resolução de SL
São aqueles que após um número finito de operações fornecem a
solução exata do sistema, a menos dos erros de
arredondamentos.
45
Sistemas Triangulares
Em sistemas triangulares as soluções são facilmente obtidas.
Sistema triangular inferior:
▪
Solução obtida via substituições sucessivas:
46
Sistemas Triangulares
▪
Generalizando:
▪
Esquematicamente:
47
Sistemas Triangulares
▪
Exemplo: Calcular a solução do sistema triangular inferior:
48
Sistemas Triangulares
Sistema triangular superior:
▪
Solução obtida via substituições sucessivas:
49
Sistemas Triangulares
▪
Continuando:
▪
Esquematicamente:
50
Sistemas Triangulares
▪
Exemplo Calcular a solução do sistema triangular inferior:
Os elementos x são
obtidos em ordem
reversa.
51
Referencias Bibliográficas
1.
Aderito Luis Martins Araujo , Analise Numerica Engenharias
Mecânica e de Materiais.
2. Frederico Ferreira Campos Filho, Algoritmos Numéricos.
52