ESTUDO DE UMA FORMULAÇÃO EXPLÍCITA-IMPLÍCITA PARA
ESCOAMENTOS INCOMPRESSÍVEIS
Rafael Alves Rodrigues
Lucia Catabriga
[email protected]
[email protected]
Universidade Federal do Espı́rito Santo-UFES,
Av. Fernando Ferrari, 514, 29.075-910, Vitória, ES, Brasil
Resumo. Este trabalho tem por objetivo estudar o comportamento de uma formulação explicı́ta-implı́cita das equações de Navier-Stokes para escoamentos incompressı́veis baseada
no método das diferenças finitas. Os termos não lineares das componentes horizontal e vertical da velocidade são aproximados por diferenças finitas de primeira ordem utilizando uma
aproximação upwind e as derivadas temporais são aproximadas pelo método de Euler explı́cito.
A pressão é aproximada por diferenças finitas de segunda ordem e necessita da solução de um
sistema linear em cada passo de tempo, tendo portanto caracterı́stica de um esquema implı́cito.
São estudados problemas clássicos regidos pelas equações de Navier-Stokes como o problema
do escoamento em uma cavidade, o problema do escoamento sobre um degrau, o problema
em torno de um disco, dentre outros problemas na presença de obstáculos. Neste trabalho, a
geometria irregular dos obstáculos no domı́nio é definida a partir de uma imagem que identifica a região de fluido e a região dos obstáculos pela diferença de cores de cada pixel, que
representam uma célula do domı́nio. Também é feito um estudo do comportamento do sistema
linear resultante para o cálculo da pressão considerando o método não estacionário GMRES
com relação ao número de vetores necessários para reinicializar o método.
Keywords: Escoamento incompressı́veis, Equações de Navier-Stokes, Método das diferenças
finitas, Escoamento em geometria irregulares, Método GMRES.
1.
INTRODUÇÃO
Sem dúvida, um fato importante no processo do desenvolvimento cientı́fico e tecnológico
é a simulação em software de diversas situações fı́sicas encontrada pelo homem no mundo real.
Tal importância surge, porque é possı́vel analisar o comportamento das caracterı́sticas fı́sicas
em projetos e processos antes da construção de protótipos reais, isto implica em uma redução
de custo e tempo de desenvolvimento (ou aperfeiçoamento) do problema analisado. Como
exemplo, a análise da dinâmica de fluidos tem sido muito solicitada para fornecer soluções a
problemas complexos em hidrodinâmica, projetos de edificações, aeronaves, navios e veı́culos
espaciais (Griebel, 1998; Fortuna, 2000).
A modelagem desses problemas é determinada pelo conjunto de equações diferenciais conhecida como equações de Navier-Stokes. Nesse trabalho utilizamos o método das diferenças
finitas para aproximar as equações governantes. Baseado nesse método, são construı́das expressões de caráter explı́cito para o cálculo das velocidades no escoamento, tendo como base
o método de Euler explı́cito aplicado às derivadas temporais das equações. Para o cálculo da
pressão, entretanto, o processo de aproximação por diferenças finitas gera uma expressão com
caracterı́stica implı́cita. Dessa forma é necessário a solução de um sistema linear que possui
uma ordem elevada que, em geral, são solucionados iterativamente através de métodos baseados em espaço de Krylov (Saad, 2003).
Entre os métodos baseado no espaço de Krylov, um dos mais utilizados para resolução de sistemas de grande porte para matrizes não simétricas é o método iterativo dos Resı́duos Mı́nimos
Generalizados (GMRES). Quando for considerado a estratégia de reinicialização é denominado
GMRES(m), sendo m o número de vetores estabelecidos para a reinicialização (Saad, 2003).
Dependendo do problema tratado, a convergência do GMRES(m) para solução do problema
pode ser lenta sendo necessário um número maior de iterações e, consequentemente, um tempo
maior de processamento. Com objetivo de acelerar o processo de convergência desses métodos
são utilizados precondicionadores (Saad, 2003; Barrett et al., 1994). Neste trabalho estudaremos
o comportamento do precondicionador baseado na decomposição incompleta LU sem nenhum
nı́vel de preenchimento, denominado ILU(0), em problemas incompressı́veis na presença de
obstáculos na solução do sistema linear resultante da equação da pressão para uma formulação
implı́cita-explı́cita.
Este artigo está organizado como a seguir. Na próxima seção descrevemos ....
2.
METODOLOGIA
2.1 Equações Governantes
As equações de Navier-Stokes modelam o escoamento de fluidos compressı́veis, incompressı́veis, turbulentos e laminares Fortuna (2000). Essas equações representam a expressão
matemática de princı́pios fı́sicos simples: conservação da massa, conservação de momento (segunda lei de Newton) e conservação da energia (primeira lei da termodinâmica) Fortuna (2000).
Os problemas considerados são isotérmicos, portanto a análise de energia será desprezada, o escoamento é incompressı́vel, viscoso e laminar sem atuação de forças externas. Nessas condições
, o escoamento pode ser caracterizado pelas seguintes equações provenientes de simplificações
Figura 1: Redução de escala do modelo – Ω e Ω∗ são similares.
das equações gerais de Navier-Stokes:
∂u ∂v
+
= 0. (Eq. da continuidade)
∂x ∂y
∂u ∂p
∂u2 ∂uv
1 ∂ 2u ∂ 2u
−
+
=
+
−
. (Eq. de momento na direção x)
∂t
∂x
Re ∂x2 ∂y 2
∂x
∂y
∂v 2 ∂uv
1 ∂2v ∂2v
∂v ∂p
−
+
=
+
−
. (Eq. de momento na direção y)
∂t ∂y
Re ∂x2 ∂y 2
∂y
∂x
(1)
(2)
(3)
As grandezas u, v e p representam, respectivamente, a velocidade do escoamento na direção
x, na direção y e a pressão do escoamento na região de domı́nio Ω do fluido. As equações de
Navier-stokes apresentadas em (1), (2) e (3) estão na forma adimensional. Essa caracterı́stica é
necessária para garantir que as propriedades de escoamento aplicadas a um modelo hipotético
sejam válidas para um modelo em escala real, como, por exemplo, fazer com que o escoamento
sobre um modelo da asa de um avião seja válido para uma asa em tamanho natural, Fig. (1).
Com isso o conceito de similaridade de escoamento é verificado, ou seja, fica garantido que
as caracterı́sticas do modelo e da asa são similares, diferindo apenas na escala (Fortuna, 2000;
Griebel, 1998). Um importante parâmetro utilizado com esse objetivo é o número de Reynolds,
Re, caracterizado por:
Re =
ρo Lo Vo
µ
(4)
Sendo µ a viscosidade dinâmica do fluı́do, e os valores Lo , Vo , ρo , são, respectivamente, valores
de referência de comprimento, velocidade e densidade do fluido.
2.2 Condições de contorno e iniciais
Figura 2: Componentes normal un e tangencial ut da velocidade em uma fronteira.
Na modelagem do escoamento dos fluidos, inicialmente (t = 0) é imposto condições iniciais sobre as velocidades, u = u0 (x, y) e v = v0 (x, y), de tal forma que satisfaça a Eq.
(1). Também é necessário estabelecer as condições de contorno do domı́nio Ω de definição
do problema. Para definição das condições de contorno, sejam as componentes velocidade
tangencial (ut ) e normal (un ) ao contorno do domı́nio Ω. Para pontos ao longo do contorno
do domı́nio, e para pontos que definem o contorno dos obstáculos caso haja, considera-se as
seguintes condições de contorno:
Condição tipo No-slip (parede ou obstáculo sólido não-escorregadios): Neste tipo de condição
de contorno, tanto a velocidade normal un quanto a velocidade tangencial ut são nulas,
Fig. (2). Essas condições refletem o fato do fluido imediatamente adjacente à superfı́cie
da parede estar em repouso em relação à parede e também reflete o fato que o fluido não
pode penetrar na parede.
Condição tipo Free-slip (parede ou obstáculo sólido escorregadios): Da mesma forma que em
uma fronteira tipo no-slip, a velocidade normal do fluido é nula. Porém, a derivada normal
de velocidade tangencial é nula, ou seja, ∂ut /∂n = 0. Isso significa que a velocidade
tangencial não muda na direção normal.
Condição tipo Inflow (Região de entrada de fluido): A velocidade em uma região de entrada
de fluido é explicitamente fornecida. Em certos problemas, a velocidade de entrada tem
que respeitar certas condições inerentes para não criar dispersões numéricas na solução.
Condição tipo Outflow (Região de saı́da de fluido): Em uma região de saı́da de fluido as
derivadas normais da velocidade nomal un e tangencial ut são consideradas nulas, ou
seja, ∂ut /∂n = ∂un /∂n = 0. Essa condição reflete o fato que a velocidade total não
muda na direção normal no contorno.
2.3 Tratamento numérico
As Eqs. (1), (2) e (3) são discretizadas pelo método das diferenças finitas. O processo de
discretização das esquações de Navier-Stokes por diferenças finitas pode ser consultado com
todos os detalhes em Griebel (1998). A seguir, apresentamos um resumo das principais caracterı́sticas da formulação de diferenças finitas para as equações de Navier-Stokes. Observando
Figura 3: Malha deslocada
as equações de Navier-Stokes, pode-se notar que elas definem um conjunto de equações com
três incógnitas a serem determinadas: velocidade u na direção x, velocidade v na direção y e a
pressão p. Uma forma de discretizar o domı́nio é considerar as incógnitas concentradas todas em
um ponto da malha, entretanto tal abordagem pode gerar campos oscilatórios de pressão. Um
forma de evitar isso é considerar as incógnitas localizadas em posições diferentes. Uma malha
que tornou-se padrão no cálculo de escoamentos incompressı́veis formulados por diferenças
finitas e aquela que utiliza as incógnitas armazenadas em posições distintas, denominada malha
deslocada ou Staggered grid, Fig. (3) (Fortuna, 2000). Esta malha é caracterizada por células
e não por pontos como usualmente encontrado na literatura. A distribuição das incógnitas nas
células acontece de forma que a pressão pij esteja localizada nos centros, a velocidade uij nas
aretas verticais e a velocidade vij nas aretas horizontais, como mostra a Fig. 3. Os termos de
derivada primeira e segunda ordem, em relação a x e a y, das Eqs. (1), (2) e (3) são, respectivamente, discretizados por diferenças atrasadas e diferenças centrais.
Figura 4: Interpolação de pontos não definidos na malha.
Figura 5: Interpolação de pontos não definidos na malha para o esquema donor-cell.
Para discretizar os termos convectivos, ∂u2 /∂x, ∂v 2 /∂y, ∂uv/∂x e ∂uv/∂y, é necessário uma
estratégia especial. Tal estratégia surge devido a necessidade de serem considerados pontos não
definidos na malha para realizar a discretização. Além disso, nos escoamento onde a convecção
é dominante, como aqueles com alto números de Reynolds, uma discretização adequada dos
termos convectivos é de extrema importância para que não ocorram oscilações ou dispersões
na solução numérica (Fortuna, 2000). Uma forma de discretizar ∂uv/∂y, como sugerido por
Griebel (1998), é calcular a média u e v nos pontos marcados com ×, mostrado na Fig. (4),
através da média dos pontos definidos na malha, o que nos dá a Eq. ( 5).De forma semelhante,
pode-se discretizar o termo ∂u2 /∂x tomando a diferença central dos pontos marcado com +,
mostrado Fig. (4). Tais pontos são obtidos da média dos pontos na malha, como no caso anterior.
∂uv
1 (vi,j + vi+1,j ) (ui,j + ui,j+1 ) (vi,j−1 + vi+1,j−1 ) (ui,j−1 + ui,j )
(5)
−
=
∂y i,j
δy
2
2
2
2
2
2 2 !
∂u
ui,j + ui+1,j
ui−1,j + ui,j
1
−
(6)
=
∂x i,j
δx
2
2
Entretanto, a utilização da discretização por diferenças finitas centrais para ∂uv/∂y como representado na Eq. (5), pode gerar oscilações numéricas quando os termos convectivos tornam-se
predominantes, ou seja, quando o número de Reynolds ou a velocidade do escoamento tornamse elevados (Griebel, 1998). Para contornar esse fato, é utilizado critérios de estabilização na
discretização dos termos convectivos, conhecidos como upwind. O critério upwind é um esquema de discretização que depende da direção do escoamento em um ponto (i, j) da malha.
No presente trabalho utilizou-se o esquema de estabilização donor-cell, descrito em Griebel
(1998). Para explicar o esquema donor-cell, considere os termos convectivos da forma ∂ku/∂x
definidos em um domı́nio unidimensional, assumindo que k seja dado nos pontos médios, conforme Fig. (5). A discretização dos termos convectivos pela esquema donor-cell é dado por:
kr ur − kl ul
∂ku
(7)
=
∂x i
δx
sendo ur e ul escolhido de acordo com o sinal de kr e kl :
ui ,
kr > 0
ui−1 , kl > 0
ur =
ul =
ui+1 , kr < 0
ui ,
kl < 0
(8)
O esquema de estabilização donor-cell é de ordem Θ(δx). Em geral, a discretização upwind
introduz uma forte difusão numérica na solução (Fortuna, 2000). Uma forma de diminuir a
difusão numérica e melhorar a ordem de aproximação obtida com o esquema é utilizar uma
estratégia hı́brida de discretização, baseada na junção da discretização por diferenças centrais,
como apresentada na Eq.(5), e da discretização por upwind:
γ.diferenças upwind + (1 − γ).diferenças centrais
(9)
sendo o parâmetro γ escolhido no intervalo [0, 1]. De acordo com Griebel (1998), γ deve ser
escolhido de tal forma que:
ui,j δt vi,j δt (10)
,
γ ≥ max i,j
δx δy onde ui,j e vi,j são as componentes de velocidades da célula (i, j) e δt representa o passo no
tempo. Assim, utilizando o esquema hı́brido, a discretização do termo ∂uv/∂y será :
∂uv
1 (vi,j + vi+1,j ) (ui,j + ui,j+1 ) (vi,j−1 + vi+1,j−1 ) (ui,j−1 + ui,j )
+
−
=
∂y i,j
δy
2
2
2
2
γ |vi,j + vi+1,j | (ui,j − ui,j+1 ) |vi,j−1 + vi+1,j−1 | (ui,j−1 − ui,j )
(11)
−
δy
2
2
2
2
Seguindo esses mesmos princı́pios utilizados para discretizar o termo ∂uv/∂y, pode-se discretizar os outros termos convectivos presentes nas Eqs. (2) e (3). As componentes da velocidade, u e v também variam com o tempo. A discretização temporal desses termos é aproximada
de maneira semelhante as derivadas com relação ao espaço. Um intervalo de tempo [0, tf inal ]
de análise é definido e subdivido em subintervalos de tempo δt. As equações das velocidades
são discretizadas utilizando o método de Euler explı́cito (Fortuna, 2000). As derivadas são
computadas no passo de tempo (n + 1) utilizando as informações do passo n. Tal abordagem,
quando aplicada as equações da continuidade produzem uma expressão explı́cita para o cálculo
das velocidades no passo de tempo (n + 1), ou seja, produz uma expressão que não há necessidade de solucionar um sistema linear para obtê-las:
(n+1)
(n+1)
∂u
∂v
u(n+1) − u(n)
v (n+1) − v (n)
=
=
(12)
∂t
δt
∂t
δt
Um fato importante que deve ser considerado é a escolha do tamanho da passo de tempo, pois
um valor que não seja adequado pode gerar oscilações numéricas, já que o esquema explı́cito é
condicionalmente estável. De acordo com Griebel (1998), δt deve ser escolhido de forma que:
!
−1
Re 1
1
δy
δx
δt = τ min
+
,
.
(13)
,
2 δx δy
|umax | |vmax |
onde τ é um parâmetro escolhido no intervalo ]0, 1], |umax | e |vmax | são as velocidades máximas
no domı́nio nas direções x e y, respectivamente. Aplicando as derivadas temporais discretizadas
por Euler explı́cito nas equações de momento, obtêm-se:
∂u2 ∂uv ∂p
1 ∂ 2u ∂ 2u
(n+1)
(n)
−
+
−
−
.
u
= u + δt
Re ∂x2 ∂y 2
∂x
∂y
∂x
1 ∂ 2u ∂ 2u
∂u2 ∂uv ∂p
(n+1)
(n)
v
= v + δt
−
+
−
−
.
Re ∂x2 ∂y 2
∂x
∂y
∂x
Inserindo a abreviação:
1 ∂ 2u ∂ 2u
∂u2 ∂uv
(n)
(n)
F = u + δt
.
−
−
+
Re ∂x2 ∂y 2
∂x
∂y
1 ∂ 2u ∂ 2u
∂u2 ∂uv
(n)
(n)
G = v + δt
−
+
−
.
Re ∂x2 ∂y 2
∂x
∂y
(14)
(15)
(16)
Obtêm-se a seguintes expressões para o cálculo das velocidades:
∂p(n+1)
.
∂x
∂p(n+1)
= G(n) − δt
.
∂y
u(n+1) = F (n) − δt
(17)
v (n+1)
(18)
As Eqs. (17) e (18) representam a discretização das equações de momento Eqs. (2) e (3). No
processo de cálculo das velocidades, os valores de F e G são associados ao nı́vel de tempo n,
enquanto que os termos associados a pressão são referentes ao nı́vel de tempo n + 1. Substituindo as Eqs. (17) e (18) na Eq. (1), obtêm-se a equação de Poisson para a pressão:
∂ 2 p(n+1) ∂ 2 p(n+1)
1 ∂F (n) ∂G(n)
(19)
+
=
+
∂x2
∂y 2
δt
∂x
∂y
Essa abordagem de discretização é caracterizada sendo explı́cita na velocidade e implı́cita na
pressão, já que há a necessidade de resolver o sistema linear esparso obtido a partir da Eq. (19)
quando é aplicado o método das diferenças finitas. Uma vez calculado o valor da pressão no
passo n + 1 obtido pela solução do sistema linear, pode-se obter os valores das velocidades
utilizando as Eqs. (17) e (18).
2.4 Tratamento das geometrias irregulares
A condições de contorno não acontecem apenas nos limites do domı́nio analisado, mas
também podem ocorrer em obstáculos inseridos no domı́nio, como por exemplo na Fig. (6).
Na presença de obstáculos, para aplicar as condições de contorno, é necessário identificar o
conjunto de células (Fig. (3)) que fazem parte do obstáculo. Tal processo de identificação pode
se tornar muito difı́cil quando se considera geometrias complexas. Considere, por exemplo,
o estudo do escoamento no domı́nio mostrado na Fig. (6). A irregularidade na geometria dos
obstáculo dificulta o processo de tratamento das condições de contorno. Uma forma de tratar
as condições de contorno desse problema é gerar o domı́nio de discretização a partir de uma
imagem que identifica a região de fluido e a região de obstáculos pela diferença de cores de cada
pixel, que representam uma célula no domı́nio, como abordado em Rodrigues and Catabriga
(2009); Griebel (1998). A partir de uma imagem que define a geometria do domı́nio, o processo
de indentificação dessas células consiste em fazer com que cada pixel dessa imagem represente
uma célula na malha. De acordo com a cor de cada pixel é identificado se uma determinada
célula está na região de escoamento de fluido ou não. A Fig. (6) mostra uma região de um
domı́nio onde os pixels de cor branca representam a região de escoamento do fluido e os pixels
de cor cinza os obstáculos.
Figura 6: Imagem que define as regiões do domı́nio.
2.5 Solução do sistema linear resultante
Para a solução do sistema linear resultante adotamos o método dos Resı́duos Mı́nimos
Generalizados com reinicializações, GMRES(m). Este método está baseado nos subespaços de
Krylov, que podem ser definidos por:
Km (A, r0 ) = span{r0 , Ar0 , A2 r0 , . . . , Am−1 r0 }
(20)
onde A é a matriz dos coeficientes do sistema linear, r0 = b − Ax0 é o resı́duo inicial do
sistema, x0 é a solução inicial e m é a dimensão do subespaço de Krylov (Saad, 2003). A
solução aproximada do sistema pode então ser representada por:
xm = x0 + c0 r0 + c1 Ar0 + c2 A2 r0 + · · · + cm−1 Am−1 r0
(21)
Para encontrar essa solução aproximada é necessário encontrar os coeficientes desconhecidos
ci que podem ser determinados a partir da minimização da função:
R(xm ) = r(xm )T r(xm )
(22)
O processo de minimização da Eq. (22) pode ser encontrado com mais detalhes em Saad (2003);
Barrett et al. (1994). Dependendo do problema fı́sico que resulta na necessidade de solução de
um sistema linear, a convergência do GMRES(m) pode ser lenta. Com intuı́to de acelerar o
processo de convergência, na resolução do sistema linear podem ser considerados precondicionadores (Saad, 2003; Barrett et al., 1994). Entre as classes de precondicionadores mais utilizados destacam-se os precondicionadores baseados na decomposição LU incompleta. Neste
trabalho, estudamos a ação do precondicionador ILU (0), que desconsidera qualquer nı́vel de
preenchimento fill-in na matriz resultante (Saad, 2003). Neste trabalho faremos comparações
entre o método iterativo estacionário SOR (White, 2003) com o GMRES na solução do sistema
linear proviniente da Eq. (19).
3.
EXPERIMENTOS NUMÉRICOS
Nesta seção mostramos os resultado obtidos para alguns problemas clássicos regidos pelas
equações de Navier-Stokes, tais como: o escoamento em uma cavidade, o escoamento sobre
um degrau e o escoamento em torno de um disco. Também mostraremos alguns exemplos
de escoamentos através de obstáculos. Em todos os testes realizados foram considerados o
parâmetro de upwind, γ = 0.9 e parâmetro de estabilização do passo de tempo τ = 0.5,
conforme adotado em Griebel (1998). Na próxima seção concentraremos nossa discussão na
verificação da acuidade do código desenvolvido para os três tipos escoamentos citados. Na
seção 4.2 estudaremos o comportamento dos métodos iterativos SOR e GMRES(m) para alguns
casos dos problemas fı́sicos citados acima.
3.1 Validação da implementação
Escoamento em uma cavidade Considere a cavidade mostrada na Fig. 7(a). A partir do instante inicial t0 = 0, a tampa superior começa a ser mover com uma velocidade constante ū
que, devido as tensões viscosas entre as camadas do fluido, gera o movimento do fluido no
interior da cavidade (Fortuna, 2000). A velocidade de entrada é ū = 1 e os valores iniciais de
pressão e velocidades são p = 0, u = 0 e v = 0. A condição no-slip é considerada em todas
as fronteiras para um escoamento com Reynolds Re = 1000. No processo de discretização utilizamos uma malha com 128 × 128 células no domı́nio quadrado de dimensões (0; 1) × (0; 1). A
(a) Descrição do domı́nio.
(b) Linhas de corrente
(c) Campo de velocidade do
fluido
Figura 7: Escoamento em uma cavidade para Re = 1000 em estado estacionário.
Fig. 7(b) mostra as linhas de corrente e a Fig. 7(c) mostra o campo de velocidades do fluido para
Re = 1000 após atingir o estado estacionário. Observamos que, além da região de circulação
central, formam-se regiões de circulação secundárias. Esse fato não é observado quando se
aplica valores pequenos de número de Reynolds. O comportamento de escoamento encontrado
está de acordo com os resultados encontrados em Griebel (1998).
As Figs. (8(a)) e (8(b)) apresentam, respectivamente, o domı́nio e o escoamento em uma
cavidade na presença de obstáculos, considerando as mesmas caracterı́stica aplicada ao domı́nio
mostrado na Fig. (7(a)). Observamos um comportamento coerente do escoamento em uma
cavidade com obstáculos comparada com o escoamento na ausência de obstáculos.
(a) Domı́nio com obstáculos
(b) Linhas de corrente
Figura 8: Escoamento em uma cavidade para Re = 1000 com obstáculos.
Escoamento sobre um Degrau Outro problema bastante popular no processo de validação de
códigos de simulação é a análise do comportamento do fluido sobre um degrau, como mostra
a Fig. 9. O fluido entra no domı́nio com velocidade horizontal u0 e seu comportamento é
alterado devido ao alargamento do canal. O fluido entra na fronteira da direita com condição
de contorno tipo inflow e sai na fronteira da esquerda com condição de controno tipo outflow.
Figura 9: Descrição do domı́nio - Escoamento sobre um degrau
Nas fronteiras superior e inferior é considerado a condição de contorno tipo no-slip. O domı́nio,
com dimensões de (0; 29) × (0; 1, 5), foi discretizado por uma malha com 288 × 72 células. O
degrau está localizado em (7, 8; 0, 8). Os valores inicias de pressão e velocidades são p = 0,
u = 0 e v = 0, entretanto é considerado u = 1 na metade superior do domı́nio para que,
no instante inicial, o fluido dentro do domı́nio satisfaça a equação da continuidade (Griebel,
1998). As Figs. (10(a)) e (10(b)) mostram as linhas de corrente do escoamento sobre o degrau,
(a) Linhas de corrente para Re = 100
(b) Linhas de corrente para Re = 500
Figura 10: Escoamento sobre um de degrau para Re = 100 e Re = 500
respectivamente, para Re = 100 e Re = 500 após atingir o estado estacionário. Observa-se que
o aumento do número de Reynolds faz com que uma segunda região de recirculação adjacente
a fronteira superior seja gerada. Resultados semelhantes podem serem encontrados em Griebel
(1998); Fortuna (2000).
Figura 11: Domı́nio do escoamento em torno de um disco com raio r = 1.2.
Escoamento em um canal É considerado um domı́nio retangular (0, 29) × (0, 5) discretizado
por uma malha com 288 × 72 células. As condições de contorno estão representadas na Fig. 11.
Na entrada do fluido é considerado um perfil parabólico com velocidade máxima de u0 = 1, 5.
A Fig. 12 apresenta o escoamento no canal na presença de um disco, onde nota-se a formação
de vórtices periódicos para Re = 100. A Fig. 13 considera obstáculos com geometrias variadas
no mesmo domı́nio apresentado na Fig. 11. O comportamento do escoamento em um canal para
Re = 50 na presença de obstáculos pode ser observado na Fig. 14.
3.2 Análise dos métodos iterativos
Para a solução do sistema linear resultante utilizamos os métodos SOR e GMRES com e
sem o precondicionador ILU(0). Consideramos na análise dos métodos GMRES e GMRES-
Figura 12: Linhas de corrente para o escoamento em torno do disco para Re = 100.
Figura 13: Domı́nio para o escoamento em um canal com obstáculos.
Figura 14: Linhas de corrente para o escoamento em um canal com obstáculos para Re = 50.
PRE (GMRES com o precondicionador ILU(0)) diferentes números de vetores na base do
espaço de Krylov (especificamente 5, 10, 15 e 20 vetores).
No problema da cavidade, consideramos os mesmos dados já descritos na seção anterior,
porém todos os testes são analisados no intervalo de tempo [0; 2] e a tolerâncida adotada é de
10−4 . Nas Figs. 15(a) e 15(b) podemos observar, respectivamente, o comportamento do número
de iterações por passo de tempo para os métodos GMRES e GMRES-PRE. Nas figuras a medida
que o problema avança no tempo o número de iterações diminui. Além disso, podemos notar
claramente que a variação do número de vetores na base afeta o número de iterações do métodos
GMRES e GMRES-PRE. Ocorre uma queda no número de iterações a medida que a ordem do
espaço aumenta. Essa caracterı́stica está de acordo com o esperado, já que o número de vetores
na base do espaço de Krylov tem forte influência sobre o número de iterações para atingir a
precisão desejada.
5000
120
GMRES(5)
GMRES(10)
GMRES(15)
GMRES(20)
4500
GMRES-PRE(5)
GMRES-PRE(10)
GMRES-PRE(15)
GMRES-PRE(20)
100
4000
3500
Iteration number
Iteration number
80
3000
2500
2000
60
40
1500
1000
20
500
0
0
0
10
20
30
40
50
step in time
60
(a) GMRES(m)
70
80
90
100
0
10
20
30
40
50
step in time
60
70
80
90
100
(b) GMRES-PRE(m)
Figura 15: Número de iterações do método GMRES por passo de tempo - Problema da cavidade.
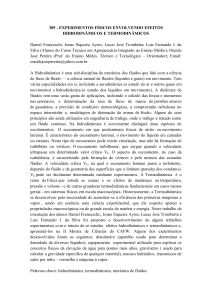
A Fig. 16(a) mostra o número total de iterações e a Fig. 16(b) mostra o tempo total de
processamento para os métodos SOR, GMRES com e sem precondicionamento para 5, 10, 15 e
20 vetores na base. Podemos observar que o método GMRES converge em um número menor
de iterações para a maioria do número de vetores de Krylov quando comparado com o método
SOR. Porém, o tempo de processamento compromete a eficiência do método GMRES se não
for considerado um precondicionador. Para esse teste observamos que o GMRES-PRE(10) precondicionado necessitou do menor tempo de processamento. Além disso, pode ser observado
que todos os testes realizados com o GMRES-PRE, obtiveram menor tempo de processamento
que o método SOR.
GMRES(5)
GMRES(10)
GMRES(15)
GMRES(20)
GMRES−PRE(5)
GMRES−PRE(10)
GMRES−PRE(15)
GMRES−PRE(20)
SOR
100000
100
total processing time
total iteration number
10000
GMRES(5)
GMRES(10)
GMRES(15)
GMRES(20)
GMRES-PRE(5)
GMRES-PRE(10)
GMRES-PRE(15)
GMRES-PRE(20)
SOR
1000
1000
100
10
1
10
0.1
1
0.01
SO
E
E
PR
PR
S-
RE
R
M
G
S
RE
S−
RE
R
M
G
SO
M
G
S
RE
M
G
(b) Tempo total de processamento.
(a) Número total de iterações.
Figura 16: Comparativo do número de iterações e tempo de processamento - Problema da cavidade.
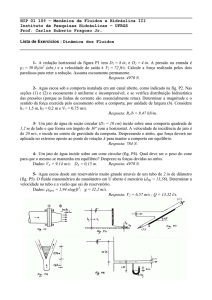
A Fig. 17 mostra o tempo de processamento para os métodos SOR, GMRES(15) e GMRESPRE(10) durante todos os passos de tempo considerados. Os métodos GMRES(15) e GMRESPRE(10) foram escolhidos por apresentarem o menor tempo de processamento para os casos
sem e com precondicionador. Observamos que a medida que o tempo avança o tempo de processamento tende a ser bem pequeno e o mesmo para os três métodos. Isso explica porque
o método SOR, que reconhecidamente é um método com convergência bastante lenta, acaba
sendo comparável em termos de número de iterações e tempo de processamento que o métodos
GMRES para essa aplicação.
25
GMRES(15)
GMRES-PRE(10)
SOR
time per step
20
15
10
5
0
0
10
20
30
40
50
step in time
60
70
80
90
100
Figura 17: Comparativo dos melhores tempo por passo dos métodos SOR, GMRES e GMRES-PRE Problema da Cavidade.
No problema do disco, consideramos os mesmos dados já descritos na seção anterior,
porém todos os testes são analisados no intervalo de tempo [0; 2, 4] e a tolerâncida adotada
é de 10−3 . O comportamento dessa aplicação é similar aquele observado para o problema da
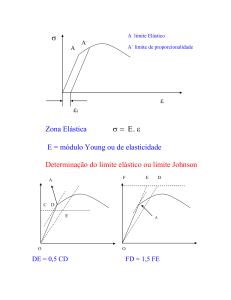
cavidade. A Fig. 18 mostra o número total de iterações e o tempo total de processamento
para os métodos SOR, GMRES com e sem precondicionamento para 5, 10, 15 e 20 vetores na
base. Também neste caso podemos observar que o método GMRES converge em um número
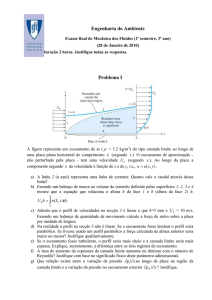
menor que o método SOR, mas que o tempo de processamento é maior quando não é considerado o precondicionamento. Na Fig. 19 podemos observar o tempo de processamento para os
métodos SOR, GMRES(20) e GMRES-PRE(15) durante todos os passos de tempo considerados. Como no caso anterior, ss métodos GMRES(20) e GMRES-PRE(15) foram escolhidos
por apresentarem o menor tempo de processamento para os casos sem e com precondicionador.
Neste caso cabem as mesmas explicações que no caso da cavidade, ou seja, a medida que o
tempo avança, o sistema linear converge para um número muito pequeno de iterações necessitando de um tempo pequeno e constante para atingir a convergência.
GMRES(5)
GMRES(10)
GMRES(15)
GMRES(20)
GMRES−PRE(5)
GMRES−PRE(10)
GMRES−PRE(15)
GMRES−PRE(20)
SOR
100000
100
total processing time
total iteration number
10000
1000
100
GMRES(5)
GMRES(10)
GMRES(15)
GMRES(20)
GMRES-PRE(5)
GMRES-PRE(10)
GMRES-PRE(15)
GMRES-PRE(20)
SOR
1000
10
1
10
0.1
1
0.01
SO
E
E
PR
PR
S-
RE
R
M
G
S
RE
S−
RE
R
M
G
SO
M
G
S
RE
M
G
(b) Tempo total de processamento.
(a) Número total de iterações.
Figura 18: Comparativo do número de iterações e tempo de processamento - Problema do disco.
100
GMRES(20)
GMRES-PRE(15)
SOR
time per step(logarithm scale)
10
1
0.1
0.01
0
20
40
60
80
100
step in time
Figura 19: Comparativo dos melhores tempo por passo dos métodos SOR, GMRES e GMRES-PRE Problema do disco.
4.
CONCLUSÕES
Este trabalho teve por objetivo estudar o comportamento de uma formulação explicı́taimplı́cita das equações de Navier-Stokes para escoamentos incompressı́veis baseada no método
das diferenças finitas. Os termos não lineares das componentes horizontal e vertical da velocidade foram aproximados por diferenças finitas de primeira ordem utilizando uma aproximação
upwind e as derivadas temporais foram aproximadas pelo método de Euler explı́cito. Já a
pressão foi aproximada por diferenças finitas de segunda ordem necessitando portanto da solução
de um sistema linear em cada passo de tempo. Foram analisados o comportamento da formulação
implementada no problema do escoamento em uma cavidade, no problema do escoamento sobre um degrau, no problema em torno de um disco e em problemas similares na presença de
obstáculos. A geometria irregular dos obstáculos no domı́nio foi definida a partir de uma imagem que identifica a região de fluido e a região dos obstáculos pela diferença de cores de
cada pixel. Também foi feito um estudo do comportamento do sistema linear resultante para o
cálculo da pressão considerando o método não estacionário GMRES com relação ao número de
vetores necessários para reinicializar o método considerando o precondicionador ILU(0).
Através dos testes realizados observamos a acurácia da formulação, mesmo na presença
de obstáculos para todas as aplicações analisadas. A utilização do precondicionador ILU(0) no
método GMRES foi crucial para esse método apresentar vantagens em tempo de processamento
com relação ao método SOR. A principal razão para que o método SOR tenha um comportamento comparável ao GMRES nas aplicações estudadas está no fato delas necessitarem em
tempos mais avançados de um número muito reduzido de iterações, consequentemente, menor
tempo de processamento. Uma vez que o método GMRES possui cada iteração mais cara computacionalmente que o método SOR, quando o número de iteração para a convergência for
pequeno para ambos, o método SOR tende a ter vantagens em termos de tempo de processamento.
Agradecimentos
Rafael Alves Rodrigues agradeçe a Fundação de Apoio a Pesquisa do Estado do Espı́rito
Santo (FAPES) pela bolsa de Iniciação cientı́fica concedida pelo Programa de Institucional de
Bolsas de Iniciação Cientı́fica (PIBIC). Os autores agradecem ao Conselho Nacional de Desenvolvimento Cientı́fico e Tecnológico (CNPq) pelo apoio recebido dentro do escopo o do Projeto
CNPq 620185/2008-2.
Referências
Barrett, R., Berry, M., Chan, T. F., Demmel, J., Donato, J., Dongarra, J., Eijkhout, V., Pozo, R.,
Romine, C., & der Vorst, H. V., 1994. Templates for the Solution of Linear Systems: Building
Blocks for Iterative Methods, 2nd Edition. SIAM, Philadelphia, PA.
Fortuna, A. O., 2000. Técnicas Computacionais para Dinâmica dos Fluidos - Conceitos
Básicos e Aplicações. Edsup - Editora da Universidade de São Paulo.
Griebel, M., 1998. Numerical Simulation Fluid Dynamics. SIAM, Philadelphia, PA.
Rodrigues, R. & Catabriga, L., 2009. Tratamento de obstáculos com geometria complexa aplicada a escoamentos laminares. In Anais do Congresso Nacional de Matemática aplicada e
Computacional, Cuiába, Brasil.
Saad, Y., 2003. Iterative methods for sparse linear systems, 2nd Edition. Society for Industrial
- Applied Mathematics.
White, R. E., 2003. Computational Modeling with Methods and Analys. CRC Pres.