Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
EMENTA
Desenvolvimento e aplicação das equações vetoriais que relacionam
as várias grandezas cinemáticas envolvidas no estudo dos movimentos
de sólidos. Classificação dos movimentos do sólido. Aplicação dos
princípios e equações cinemáticas nos movimentos de dispositivos
compostos por vários sólidos e vínculos.
r x iˆ y ˆj z kˆ
Vetor velocidade média vm :
Vetor Posição:
vm
r
t
OBJETIVOS GERAIS
Desenvolver no aluno uma visão factível da mecânica, criando
no mesmo uma "intuição" correta dos fenômenos mecânicos.
Capacitar o estudante de engenharia a entender e resolver
problemas que envolvam a cinemática dos sólidos e dispositivos, que
são comuns no exercício da profissão de engenheiro.
OBJETIVOS ESPECÍFICOS
Estabelecer os conceitos básicos sobre Cinemática do
Sólido. Preparar os alunos para entender os dispositivos mecânicos
comuns à vida do Engenheiro.
Fornecer ferramentas aos estudantes para entender e
acompanhar em bom nível as disciplinas específicas do curso, em
especial aquelas ligadas à cinemática de dispositivos, vibrações e
outras.
CONTEÚDO PROGRAMÁTICO
1. Cinemática da Partícula;
(a) Vetor Posição;
(b) Vetor Velocidade;
(c) Vetor Aceleração;
i. aceleração tangencial;
ii. aceleração normal;
2. Cinemática do Sólido;
(a) Classificação dos Movimentos;
(b) Movimento de Translação;
i. equações vetoriais de velocidade
aceleração;
(c) Movimento Plano;
(d) Rotação com Eixo Fixo;
i. equações vetoriais de velocidade
aceleração;
(e) Movimento Plano em geral;
i. equações vetoriais de velocidade
aceleração;
(f) Centro Instantâneo de Rotação;
(g) Movimento Geral;
1
Vetor Velocidade instantânea:
v
Vetor aceleração média:
am
v
t
Vetor Aceleração instantânea:
Aplicação: Lançamento Oblíquo:
a
dr
dt
dv
dt
e
e
e
BIBLIOGRAFIA Básica
BEER, F. P.; JOHNSTON JUNIOR, E. R. Mecânica vetorial
para engenheiros: cinemática e dinâmica 5ª ed. 2v. São
Paulo: Makron, 1994.
HIBBELER, R. C. Dinâmica: Mecânica para Engenharia.
8.ed. Rio de Janeiro Prentice Hall Brasil, 2004.
KRAIGE,L.G.;MERIAN,J.L. Mecânica: dinâmica. Rio de
Janeiro: LTC,2004.
FRANÇA, L.N.F.;MATSUMURA,A.Z. Mecânica Geral.Edgar
Blucher, 2005.
GERE, J. Mecânica dos materiais. São Paulo: Pioneira Thomson
Learning, 2003
KAMINSKI, P.C. Mecânica geral para engenheiros. Edgar Blucher,
2000.
SEARS,F.;YOUNG H. D. Física. vol.1, Mecânica. Addison Wesley,
2008.
Cinemática dos Sólidos,Unip, Versão 2, 2009.
x x0 v0x t
Eixo x: MU:
Eixo y: MUV:
y y0 v0 y t g
t2
2
v y v0 y g t
Decomposição da velocidade inicial
v0 :
v0x v0 cos v0 y v0 sen
Tempo de subida:
2
0
ts
v0 y
g
v
sen 2
g
v02
y
Altura máxima: h
2g
Alcance:
xm
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
Movimentos curvilíneos MCU e MCUV
Cinemática dos Corpos Rígidos
Movimentos:
Translação.
Rotação sobre um eixo fixo.
Movimento Geral sobre um plano
Movimento sobre um ponto fixo
Movimento Geral qualquer.
2
MCU
MCUV aR aN aT
aR aN
v e aN perpendiculares
Função angular horária
t 0 t
1
2
t 0 0 t t 2
Velocidade angular
t cte
t
t
t 0 t
2 02 2
Velocidade linear v t
v r
Aceleração angular
t
t 0
t cte
Aceleração
resultante
aR acp2 aT2
Translação
aR acp
Aceleração
tangencial
aT 0
aT
dv
aT r
dt
rB rA rBA
Aceleração centrípeta e Força centrípeta
acp
v2
a 2 R Fcp m acp
R
vB vA
aB aA
Rotação sobre um eixo fixo
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
1rev 2 rad 3600
dr
v
dt
ds
s BP BP r sen
dt
d
v r
sen v r sen
dt
Velocidade angular: k̂
Como o ângulo entre r e é , lembrando da
v
propriedade do módulo do produto vetorial:
r r sen r sen v
v r
dv
d
d
dr
a
a r
r
dt
dt
dt
dt
d
a
r v
dt
d
Aceleração angular:
dt
kˆ kˆ kˆ
a r r
Resumo: Rotação com eixo fixo:
1. Todos os pontos apresentam trajetórias circulares.
2. Todos os pontos apresentam a mesma velocidade
angular, e esta tem a direção do eixo de rotação:
d
eˆ eˆ
dt
A direção do vetor velocidade angular é ortogonal ao
plano formadopelo movimento do ponto P, possui a direção do
eixo de rotação do sólido.
O sentido do vetor velocidade angular é dado pela regra
da mão direita: o ponto P, deslocando-se no sentido antihorário, acompanha-se o sentido do movimento de P ao longo
3
de sua trajetória circular, com os quatro dedos da mão direita;
com exceção do polegar que indicará seu sentido, apontando
para o ponto A.
3. Todos os pontos apresentam a mesma aceleração
angular, e esta tem a direção do eixo de rotação:
d
eˆ
eˆ
dt
4. O vetor velocidade instantânea no ponto P é dado por:
v
drP
v rP rP P A
dt
5. O vetor aceleração do ponto P é dado por:
dv
a v a
a rP rP
dt
a P A P A
Rotação de uma placa em torno de um eixo fixo:
Exemplos Resolvidos
1. Ache os vetores velocidade e a aceleração dos pontos
1.1 Os discos indicados para cada caso, em cada instante
de tempo. O disco parte do repouso em t = 0s.
(a) α = 2 rad/s2; =4rad/s, t = 3 s; Pontos A e B.
Sendo k̂ v r v kˆ r
Como k̂ r v r
B
a r r
a kˆ r kˆ kˆ r
a kˆ r kˆ kˆ r
2
(b) α = 2 rad/s2; t = 3 s; ; Pontos A e B, C e D.
C
kˆ kˆ r u v w u w v u v w
B
kˆ kˆ r r
45°
kˆ kˆ r kˆ r kˆ kˆ kˆ r
a kˆ r 2 r
Aceleração tangencial:
aT kˆ r aT r
Aceleração normal
aN 2 r aN 2 r
30°
60°
D
Ponto B:
rB 0.2 cos 30 iˆ 0.2 sen30 ˆj
rB 0.173 iˆ 0.1 ˆj
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
rad
2
s
2 kˆ
Pontos
A
B
D
rad
0 t 0 2 3 6
s
rad
s
6 kˆ
vB rB vB 6 kˆ 0.173 iˆ 0.1 ˆj
iˆ
aB aBT aBN aB rB vB
aBT rB
aBT 2 kˆ 0.173 iˆ 0.1 ˆj
BA 0 iˆ 0.203 ˆj 0.152 kˆ
BA 02 0.2032 0.152 BA 0.254
4
BA
0 ˆ 0.203 ˆ 0.152 ˆ
eˆ
eˆ
i
j
k
0.254
0.254
0.254
BA
eˆ 0 iˆ 0.8 ˆj 0.599 kˆ
eˆ 5 0 iˆ 0.8 ˆj 0.599 kˆ
0 iˆ 4 ˆj 2.977 kˆ rad s
iˆ
eˆ 4 0 iˆ 0.8 ˆj 0.599 kˆ
m
aBT 0.2 iˆ 0.346 ˆj 2
s
aBT 6 0.6 kˆ iˆ 6 1.038 kˆ ˆj
m
aBN 0.828 iˆ 3.6 ˆj 2
s
aB 0.2 iˆ 0.346 ˆj 0.828 iˆ 3.6 ˆj
aBN
m
aB 1.028 iˆ 3.254 ˆj 2
s
1.2 O sistema ilustrado, composto por placas soldadas a um
eixo fixo AB, gira em torno deste, com velocidade angular =
5 rad/s, que cresce a taxa de 4 rad/s2. No instante ilustrado, o
ponto E está descendo. Pedem-se:
(a) o vetor velocidade angular.
(b) o vetor aceleração angular.
(c) a velocidade do ponto D.
y
A
C
D
E
z
0.178 m
AD 0.178, 0.203,0
AD 0.178 iˆ 0.203 ˆj 0 kˆ
v AD
v 0 iˆ 4 ˆj 2.977 kˆ 0.178 iˆ 0.203 ˆj 0 kˆ
x
0.152 m
ˆj
ˆj
iˆ
kˆ
iˆ
v 0
4
2.977 0
4
0.178 0.203
0 0.178 0.203
m
v 0.608 iˆ 0.533 ˆj 0.712 kˆ
s
a D A vD
ˆj
ˆj
iˆ
kˆ
iˆ
D A 0
3.202 2.397 0
3.202
0.178 0.203
0 0.178 0.203
D A 0.487 iˆ 0.427 ˆj 0 570 kˆ
0.203 m
B
AD D A AD 0.178,0,0 0,0.203,0
iˆ
aBT
0 iˆ 3.202 ˆj 2.397 kˆ rad s2
0 iˆ 4 ˆj 2.977 kˆ rad s
aBN vB
6 kˆ 0.6 iˆ 1.038 ˆj
ˆj
(x,y,z)
(0,0.203,0)
(0,0,0.152)
(0.178,0,0)
BA 0,0.203, 0.152
aBT 2 0.173 kˆ iˆ 2 0.1 kˆ ˆj
aBN
z
0
0.152
0
2
m
vB 0.6 iˆ 1.038 ˆj
s
ˆj
y
0.203
0
0
BA A B BA 0,0.203,0 0,0,0.152
vB 6 0.173 kˆ iˆ 6 0.1 kˆ ˆj
ˆj
x
0
0
0.178
vD
D A vD
rDA
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
ˆj
ˆj
iˆ
kˆ
iˆ
v 0
4.002 2.997 0
4.002
0.608 0.533 0.712 0.608 0.533
ˆj
ˆj
iˆ
kˆ
iˆ
v 0
4.002 2.997 0
4.002
0.608 0.533 0.712 0.608 0.533
v 4.447 iˆ 1.822 ˆj 2.433 kˆ
v 4.447 iˆ 1.822 ˆj 2.433 kˆ
a D A vD
a D A vD
a 0.487 iˆ 0.427 ˆj 0 570 kˆ
4.447 iˆ 1.822 ˆj 2.433 kˆ
a 2.4319 iˆ 2.13244 ˆj 2.848 kˆ
4.447 iˆ 1.822 ˆj 2.433 kˆ
m
a 4.934 iˆ 1.395 ˆj 3.003 kˆ 2
s
m 5
a 6.8789 iˆ 0.31044 ˆj 0.415 kˆ 2
s
3. A peça rígida mostrada na figura consiste de um
eixo ABC soldado a uma placa retangular DEFH. O conjunto
gira uniformemente a uma velocidade angular de 9 rad/s, em
torno do eixo ABC. Sabendo que o movimento quando visto de
C é anti-horário, determine a velocidade e a aceleração do
vértice F.
2. No problema anterior, determine a velocidade e a
aceleração no vértice D, supor que a velocidade angular é =
5 rad/s e aumenta à razão de 20 rad/s2.
0 iˆ 4 ˆj 2.977 kˆ rad s
eˆ 20 0 iˆ 0.8 ˆj 0.599 kˆ
0 iˆ 16 ˆj 11.98 kˆ rad s 2
v 0 iˆ 4 ˆj 2.977 kˆ 0.178 iˆ 0.203 ˆj 0 kˆ
ˆj
ˆj
iˆ
kˆ
iˆ
v 0
4
2.977 0
4
0.178 0.203
0 0.178 0.203
m
v 0.608 iˆ 0.533 ˆj 0.712 kˆ
s
AD 0.178 iˆ 0.203 ˆj 0 kˆ
v AD
v 0 iˆ 4 ˆj 2.977 kˆ 0.178 iˆ 0.203 ˆj 0 kˆ
ˆj
ˆj
iˆ
kˆ
iˆ
v 0
4
2.977 0
4
0.178 0.203
0 0.178 0.203
m
v 0.608 iˆ 0.533 ˆj 0 712 kˆ
s
aD D A vD
ˆj
ˆj
iˆ
kˆ
iˆ
D A 0
16
11.98 0
16
0.178 0.203
0 0.178 0.203
D A 2.4319 iˆ 2.13244 ˆj 2.848 kˆ
D A vD
Pontos P
A
B
C
D
F
x
0
0.175
0.35
0.35
0
y
0.1
0
-0.1
0
0
z
0
0.1
0.2
0
0.2
P(x,y,z)
(0,0.1,0)
(0.175,0,0.1)
(0.35,-0.1,0.2)
(0.35,0,0)
(0,0,0.2)
AC C A AC 0.35, 0.1,0.2 0,0.1,0
AC 0.35, 0.2, 0.2
AC 0.35 iˆ 0.2 ˆj 0.2 kˆ
AC 0.352 0.2 0.22 AC 0.45
2
eˆ
AC
eˆ
AC
0.35 ˆ 0.2 ˆ 0.2 ˆ
i
j
k
0.45
0.45
0.45
eˆ 0.778 iˆ 0.444 ˆj 0.444 kˆ
eˆ 9 0.778 iˆ 0.444 ˆj 0.444 kˆ
7.002 iˆ 3.996 ˆj 3.996 kˆ rad s
AF F A AF 0,0,0.2 0,0.1,0
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
AF 0, 0.1,0.2
AF 0 iˆ 0.1 ˆj 0.2 kˆ
vF AF
v 7.002 iˆ 3.996 ˆj 3.996 kˆ 0 iˆ 0.1 ˆj 0.2 kˆ
ˆj
ˆj
iˆ
kˆ
iˆ
v 7.002 3.996 3.996 7.002 3.996
0
0.1
0.2
0
0.1
32 aN2 aT2 aN 9 0.82 aN 2.891
aN 2 r
m
s2
aN
2.891
rad
3.801
r
0.2
s
0 t
3.801 0 4 t t
3.801
s t 0.95s
4
m
vF 0.3996 iˆ 1.4 ˆj 0 7 kˆ
s
a F A vF
6. O bloquinho B repousa sobre a placa horizontal que
gira em torno de um eixo fixo. A placa parte do repouso em t =
0 e acelera à razão constante de 0.5 rad/s2. Sabendo-se que r =
200 mm, determinar o módulo da aceleração total do bloco
quando: (a) t = 0 s. (b) t = 1 s e (c) t = 2 s.
6
0 F A 0
aR aN2 aT2
F A vF
ˆj
ˆj
iˆ
kˆ
iˆ
vF 7.002 3.996 3.996 7.002 3.996
0.3996 1.4
0.7 0.3996 1.4
aT r aT 0.5 0.2 aT 0.1
0 0rad s
t 0 aN 02 r aN 0
vF 8.39 iˆ 3.304 ˆj 11.399 kˆ
aR aT aR 0.1
t 1
a F F A vF
m
s2
m
s2
0 t 0 0.5 1 0.5
0
rad
s
m
a 8.39 iˆ 3.304 ˆj 11.399 kˆ 2
s
t 1 aN 2 r aN 0.52 0.2 aN 0.05
4. No problema anterior, use = 9 rad/s e decresce
à razão de 13.5 rad/s2, encontre a velocidade e aceleração do
vértice H.
aT r aT 0.1
5. Sabe-se que a força de atrito estática entre o
bloquinho B e a placa será vencida e o bloco deslizará quando
sua aceleração alcançar 3 m/s2. Se a placa parte do repouso em
t = 0 s e acelera uniformemente à razão de 4 rad/s2, determine
o instante t e a velocidade angular da placa quando o bloco
começar a escorregar; r = 200 mm.
0.05
t 2 aT r aT 0.1
B
m
s2
rad
s
rad
t 2 aN 2 r aN 12 0.2 aN 0.2 2
s
0 t 0 0.5 2 1
aR aR aN2 aT2 aR 0.22 0.12 aR 0.2236
aR aN2 aT2 aR 3
m
s2
aR aT
aN
aT
0.1
tg
tg
arctg 2 63.430
A
m
s2
aR aR aN2 aT2 aR 0.052 0.12 aR 0.118
aN
α
rad
s2
m
s2
aT r aT 4 0.2 aT 0.8
m
s2
tg
aR
aN
aT
aT
0.1
1
tg
arctg 26.560
aN
0.2
2
m
s2
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
7. A peça rígida mostrada na figura consiste de um
eixo AB soldado a uma placa retangular DEBC. O conjunto gira
uniformemente a uma velocidade angular constante de 10 rad/s,
em torno do eixo AB. Sabendo que o movimento quando visto
de B é anti-horário, determine a velocidade e a aceleração do
vértice E.
v 8 iˆ 3.6 ˆj 4.8 kˆ 0 iˆ 0 ˆj 0.3 kˆ
ˆj
ˆj
iˆ
kˆ iˆ
v 8 3.6 4.8 8 3.6
0
0
0.3 0
0
m
vE 1.08 iˆ 2.4 ˆj 0 kˆ
s
a E B E B
0 F A 0
7
E B vE
ˆj
iˆ
kˆ iˆ
ˆj
vE 8 3.6 4.8 8 3.6
1.08 2.4
0 1.08 2.4
vE 11.52 iˆ 5.184 ˆj 23.088 kˆ
Pontos P
A
B
C
D
E
x
0
0.5
0
0
0.5
y
0.225
0
0
0
0
z
0
0.3
0.3
0
0
P(x,y,z)
(0,0.225,0)
(0.5,0,0.3)
(0,0,0.3)
(0,0,0)
(0.5,0,0)
AB B A AB 0.5,0,0.3 0,0.225,0
AB 0.5, 0.225,0.3
AB 0.5 iˆ 0.225 ˆj 0.3 kˆ
AB 0.52 0.225 0.32 AB 0.625m
2
eˆ
AB
AB
eˆ
aE E B E B
0
vE
m
aE 11.52 iˆ 5.184 ˆj 23.088 kˆ 2
s
8. Atividade 1: Encontre a velocidade e a aceleração
do ponto C considerando que a velocidade angular é 10 rad/s e
decresce a taxa de 20 rad/s2.
9. O rotor de um motor elétrico tem freqüência de 1800
rpm quando é desligado. O rotor pára após executar 625 voltas.
Supondo movimento uniformemente retardado, pedem-se:
(a) a aceleração angular do rotor.
(b) o tempo total do movimento.
0.5 ˆ 0.225 ˆ 0.3 ˆ
i
j
k
0.625
0.625
0.625
eˆ 0.8 iˆ 0.36 ˆj 0.48 kˆ
eˆ 10 0.8 iˆ 0.36 ˆj 0.48 kˆ
8 iˆ 3.6 ˆj 4.8 kˆ rad s
BE E B BE 0.5,0,0 0.5,0,0.3
BE 0, 0, 0.3
BE 0 iˆ 0 ˆj 0.3 kˆ
vE BE
1800
Hz f 30Hz
60
rad
0 2 f 0 2 30 0 60
s
188.5
2 n 2 625 1250 rad
f 1800rpm f
3926.99
2 02 2
0
02
2
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
60
2
3600 2
rad
1.44 2
2 1250
2500
s
4.524
188.5
0 t 0 188.5 4.524 t t
t 41.67s
4.524
10. Atividade 1: Suponha que um rotor de um motor
execute 2400 rpm em 4 s quando ligado e quando o rotor é
desligado ele retorna ao repouso em 40 s. Assumindo que a
aceleração do movimento é uniforme, determine o número de
voltas dado pelo rotor:
(a) quando é ligado até atingir 2400 rpm.
(b) estando em 2400 rpm, até parar.
11. Na figura, o disco B inicialmente em repouso, é
posto em contato com o disco A que gira inicialmente no
sentido horário com freqüência 450 rpm. Após o contato, ocorre
escorregamento com as superfícies, durante 6 s e durante os
quais, os discos apresentam acelerações angulares diferentes,
mas ambas constantes. Ao término do escorregamento, o disco
A apresenta freqüência constante de 140 rpm. Pedem-se:
(a) as acelerações angulares de cada disco.
(b) a velocidade final do ponto de contato.
120 mm
vPB B f rB 1.17 B f 0.12 B f
B 9.75
f
1.17
0.12
rad
s
Ou seja, parte do repouso e atinge essa velocidade
angular B f em 6 s:
B B B t B
f
0
B B
f
0
t
9.75 0
rad
B
B 1.63 2
6
s
12. Na polia dupla, ligadas por fios inextensíveis,
8a
suspensos pelos blocos A e B, os fios não escorregam sobre
polia. O bloco A parte no instante t = 0 s, com aceleração
constante aA = 300 mm/s2 e velocidade inicial vA = 240 mm/s,
ambas de baixo para cima. Determine:
(a) o número de revoluções executadas pela polia em t
= 3 s.
(b) a velocidade e a posição de B em 3 s.
(c) a aceleração do ponto D da polia em t = 0.
B
80 mm
A
Determinando a freqüência angular inicial e final do
disco A:
450
rad
A0 47.12
60
s
140
rad
2
Af 14.66
60
s
A 2 f A A 2
0
0
0
A 2 f A A
f
f
f
Disco A: MCUVR: desacelera de 450 rpm a 140 rpm.
Depois fica com MCU a 140 rpm:
MCUVR:
14.66 47.12 A 6 A
MCU:
14.66 47.12
rad
A 5.41 2
6
s
vPA Af rA vPA 14.66 0.08 vPA 1.17
m
s
Disco B possui os movimentos:
1. Parte do repouso e acelera uniformemente por 6 s.
MCUVA.
2. Mantem movimento uniforme. MCU.
MCU: Neste segundo movimento, as velocidades
tangenciais de B e A serão iguais:
vPA vPB vPB 1.17
MCUVA:
m
s
Polia menor:
aTA A rA A
aTA
A
0.3
0.12
rA
rad
A 2.5 2
s
v0
0.24
v0A 0A rA 0A A 0A
rA
0.12
rad
0A 2.0
s
1
0 0A t A t 2
2
1
0 0A t A t 2
2
1
0 0A t A t 2
2
1
2 3 2.5 32
2
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
17.25rad
17.25
rev
2
y
2.75
Polia maior:
A
rad
0A 2.0
0B
s
rad
A 2.5 2 B
s
B 0B B t B 2 2.5 3
rad
B 9.5
s
vB B rB vB 9.5 0.18 vB 1.71
0.56 m
z
m
s
rad
aTD D rB D A 2.5 2
s
Pontos
A
B
C
tg
aTD
aN D
(x,y,z)
(0,0.56,0)
(0,0,0.8)
(0.56,0,0)
BA 0 iˆ 0.56 ˆj 0.8 kˆ
m
s2
eˆ
BA
BA
eˆ
0 ˆ 0.56 ˆ 0.8 ˆ
i
j
k
0.976
0.976
0.976
eˆ 0 iˆ 0.573 ˆj 0.819 kˆ
Como o ponto C está subindo (horário):
eˆ 5 0 iˆ 0.573 ˆj 0.819 kˆ
0 iˆ 2.865 ˆj 4.095 kˆ rad s
m
s2
0.45
0.72
arctg 0.625 32
aTD
z
0
0.8
0
BA 0,0.56, 0.8
2
ND
tg
y
0.56
0
0
2
rad
s
m
0.72 2
s
aRD 0.452 0.722 aRD 0.849
x
0
0
0.56
9
BA A B BA 0,0.56,0 0,0,0.8
aND D2 rB D 0A 2
aRD a a
0.80 m
0.56 m
BA 02 0.562 0.8 BA 0.976
aTD D rB aTD 2.5 0.18 aTD 0.45
2
TD
x
E
Aceleração em D:
aND 22 0.18 aND
D
B
1
0 0B t B t 2
2
1
2 3 2.5 32 17.25rad
2
sB rB sB 17.25 0.18 sB 3.10571m
C
eˆ 4 0 iˆ 0.573 ˆj 0.819 kˆ
0 iˆ 2.292 ˆj 3.276 kˆ rad s2
AC C A AC 0.56,0,0 0,0.56,0
AC 0.56, 0.56,0
AC 0.56 iˆ 0.56 ˆj 0 kˆ
vC AC
a
vC 0 iˆ 2.865 ˆj 4.095 kˆ 0.56 iˆ 0.56 ˆj 0 kˆ
aRD
ND
D
13. O sistema ilustrado, composto por placas soldadas a um
eixo fixo AB, gira em torno deste, com velocidade angular =
5 rad/s, que cresce a taxa de 4 rad/s2. No instante ilustrado, o
ponto C está subindo. Pedem-se:
(a) a velocidade no ponto C.
(c) a aceleração do ponto C.
ˆj
ˆj
iˆ
kˆ
iˆ
vC 0
2.865 4.095 0
2.865
0.56 0.56
0 0.56 0.56
m
vC 2.293 iˆ 2.2932 ˆj 1.599 kˆ
s
aC AC vC
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
ˆj
ˆj
iˆ
kˆ
iˆ
AC 0 2.292 3.276 0 2.292
0.56 0.56
0 0.56 0.56
a 1 ˆj 0.35 iˆ 1 t ˆj 0.35 t kˆ
AC 1.8346 iˆ 1.8346 ˆj 1.2835 kˆ
ˆj
ˆj
iˆ
kˆ
iˆ
a 0.35 kˆ 0.35 t iˆ a 0.35 t iˆ 0.35 kˆ
a t 1 0.35 12 iˆ 0.35 kˆ
vC
a 1 0.35 ˆj iˆ 0.35 t t ˆj kˆ
kˆ
vC 13.97 iˆ 9.389 ˆj 6.569 kˆ
a 0.35 kˆ 0.35 t 2 iˆ a aT2 aN2
a 2 aT2 aN2 a 2 0.35 0.35 t 2
2
aC AC vC
42.1275
0.1225
4
t 343.897 t 4.31s
14. O conjunto ilustrado é constituído por um disco soldado
a um eixo vertical e gira no sentido anti-horário a partir do
repouso. A aceleração angular é constante e de valor α = 1
rad/s2. Um bloco apoia-se no disco a 0.35 m do eixo e não
escorregará em relação ao mesmo até que sua aceleração total
atinja 6.5 m/s2. Pedem-se:
(a) a aceleração 1.0 s após o início do movimento do disco.
(b) o instante que o bloco deslizará.
ĵ
kˆ
10
0.1225 t 4 42.1275 t 4
m
aC 12.1354 iˆ 11.2236 ˆj 7.8525 kˆ 2
s
0.35 m
2
6.52 0.1225 0.1225 t 4
42.25 0.1225 0.1225 t 4
aC 1.8346 iˆ 1.8346 ˆj 1.2835 kˆ
13.97 iˆ 9.389 ˆj 6.569 kˆ
y
2
m
a t 1 0.35 iˆ 0.35 kˆ 2
s
0
2.865 4.095 0
2.865
2.293 2.293 1.599 2.293 2.293
B
iˆ
2
iˆ
15. O sistema ilustrado é composto por duas rodas A e
B de raios iguais a 30 mm, que giram em torno de eixos fixos e
por um anel C, encaixado entre as mesmas. O anel tem raio
interno 72 mm e raio externo 76 mm (espessura 4 mm). Não
ocorre escorregamento entre as superfícies de contato. A roda
superior A, gira com freqüência constante f = 400 rpm no
sentido anti-horário. Pedem-se:
(a) a velocidade do anel C;
(b) a velocidade angular da roda inferior B.
(c) as acelerações dos pontos das rodas em contato
com o anel.
A
x
y
C
B
z
z
A
ˆj 1 ˆj
6.667
r 0.35 iˆ
v r
v 1 t ˆj 0.35 iˆ v 1 t 0.35 ˆj iˆ
0
1
ˆj 0 t ˆj 1 t ˆj
kˆ
v 0.35 t kˆ
a r v
aT
aN
x
400
rad
f A 400rpm f A
Hz A 2 f A A 41.887
60
s
rA
A
rCext
30
rad
C 41.887 C 16.534
76
s
vA vCext A rA C rCext C
vB vCint B rB C rCint B
rCint
rB
72
rad
B 16.534 B 39.682
30
s
aN A A2 rA ˆj aN A 41.8872 0.03 ˆj
C
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
aN B
m
aTA 0 aRA aN A 52.635 ˆj 2
s
2
B rB ˆj aN 39.6822 0.03 ˆj
vB B rB vB 26.17 0.384 vB 10.049
m
vB 10.049 ˆj
s
B
m
aTB 0 aRB aNB 47.239 ˆj 2
s
16. Na figura estão representaas duas engrenagens A e
B, com eixos fixos e com raios rA = 800 mm e rB = 384 mm,
respectivamente. A engrenagem A parte do repouso, acelera
uniformemente no sentido horário e atinge freqüência de
rotação 120 rpm em 5 s, que matém daí por diante. Pedem-se:
(a) a aceleração angular das engrenagens;
(b) a velocidade angular final da engrenagem B;
(c) a velocidade final do ponto pertencente à
engrenagem B, que faz contato com a engrenage, A.
(d) a aceleração do ponto citado no item anterior, nas
mesmas condições.
y
m
s
aBT 0 aBR aBN
aBN
vB2
10.0492
m
aBN
aBN 262.98 2
rB
0.384
s
m
aBN 262.98 iˆ 2 ^
s
17. O sistema ilustrado é formado por uma plca11
de
dimensões 0.20 x 0. 40 m soldada ao eixo fixo AB; no instante
ilustrado, o sistema gira em torno do eixo fixo com velocidade
angular de 15 rad/s, que decresce a taxa de 7 rad/s2. Quando
obsevada de um ponto B, a placa gira no sentido anti-horário.
Para o instante ilustrado, pedem-se:
(a) a velocidade do ponto C;
(b) a aceleração do ponto C.
x
2
120
A0 0 f A 120rpm f A
Hz
60
12.566
rad
A 2 f A Af 4
s
12.566 0
A
A0
A
A f
A
t
t
5
rad
A 2.51 2 o negativo é devido ao sentido horário.
s
r
vA vB A rA B rB B A A
rB
800
rad
B
12.566 B 26.17
384
s
rad
B 26.17 kˆ
s
B B0
26.17 0
B
B f
B
t
t
5
rad
B 5.236 2
s
x
0
0.4
0.4
Pontos
A
B
C
y
0.1
-0.1
0
z
0
0.2
0.2
(x,y,z)
(0,0.1,0)
(0.4,-0.1,0.2)
(0.4,0,0.2)
AB B A AB 0.4, 0.1,0.2 0,0.1,0
AB 0.4, 0.2,0.2
AB 0.4 iˆ 0.2 ˆj 0.2 kˆ
AB 0.42 0.2 0.22 AB 0.4899
2
eˆ
AB
AB
eˆ
0.4 ˆ
0.2 ˆ
0.2 ˆ
i
j
k
0.4899
0.4899
0.4899
eˆ 0.8165 iˆ 0.4082 ˆj 0.4082 kˆ
Anti-horário:
eˆ 15 0.8165 iˆ 0.4082 ˆj 0.4082 kˆ
12.2475 iˆ 6.123 ˆj 6.123 kˆ rad s
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
eˆ 7 12.2475 iˆ 6.123 ˆj 6.123 kˆ
y
85.7325 iˆ 42.861 ˆj 42.861 kˆ rad s2
AC C A AC 0.4,0,0.2 0,0.1,0
A
C
AC 0.4, 0.1,0.2
AC 0.4 iˆ 0.1 ˆj 0.2 kˆ
vC AC
vC 12.2475 iˆ 6.123 ˆj 6.123 kˆ 0.4 iˆ 0.1 ˆj 0.2 kˆ
0.203 m
ˆj
ˆj
iˆ
kˆ
iˆ
vC 12.2475 6.123 6.123 12.2475 6.123
0.4
0.1
0.2
0.4
0.1
m
vC 0.61232 iˆ 0 ˆj 1.225 kˆ
s
aC AC vC
ˆj
ˆj
iˆ
kˆ
iˆ
AC 85.7325 42.861 42.861 85.7325 42.861
0.4
0.1
0.2
0.4
0.1
AC 4.2861 iˆ 0 ˆj 8.571 kˆ
ˆj
ˆj
iˆ
kˆ
iˆ
vC 12.2475 6.123 6.123 12.2475 6.123
0.61232
0
1.225 0.61232
0
vC 7.5 iˆ 18.7534 ˆj 3.7492 kˆ
aC AC vC
aC 4.2861 iˆ 0 ˆj 8.571 kˆ
7.5 iˆ 18.7534 ˆj 3.7492 kˆ
m
aC 3.2139 iˆ 18.7534 ˆj 12.3202 kˆ 2
s
18. O sistema ilustrado, composto por placas soldadas a um
eixo fixo AB, gira em torno deste, com velocidade angular
constante de = 5 rad/s. No instante considerado o ponto C
está descendo. Pedem-se:
(a) o vetor velocidade angular.
(b) a velocidade do ponto C na forma vetorial.
(c) a aceleração do ponto C na forma vetorial.
D
B
x
E
z
0.152 m
0.178 m
Pontos
A
B
C
D
x
0
0
0.178
0.178
y
0.203
0
0.203
0
z
0
0.152
0
0
12
(x,y,z)
(0,0.203,0)
(0,0,0.152)
(0.178,0.203,0)
(0.178,0,0)
BA A B BA 0,0.203,0 0,0,0.152
BA 0,0.203, 0.152
BA 0 iˆ 0.203 ˆj 0.152 kˆ
BA 02 0.2032 0.152 BA 0.254
2
eˆ
BA
BA
eˆ
0 ˆ 0.203 ˆ 0.152 ˆ
i
j
k
0.254
0.254
0.254
eˆ 0 iˆ 0.8 ˆj 0.599 kˆ
eˆ 5 0 iˆ 0.8 ˆj 0.599 kˆ
0 iˆ 4 ˆj 3 kˆ rad s
eˆ 0
AC C A AC 0.178,0.203,0 0,0.203,0
AC 0.178,0,0
AD 0.178 iˆ 0 ˆj 0 kˆ
v AD
v 0 iˆ 4 ˆj 3 kˆ 0.178 iˆ 0 ˆj 0 kˆ
ˆj kˆ iˆ
ˆj
iˆ
v 0
4 3 0
4
0.178 0 0 0.178 0
m
v 0 iˆ 0.53 ˆj 0.71 kˆ
s
a C A vC
C A 0
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
0 iˆ 3.535 ˆj 3.535 kˆ rad s
ˆj
ˆj
iˆ
kˆ iˆ
vC 0 4.0
3 0 4.0
0 0.53 0.71 0 0.53
eˆ 0
AE E A AE 0.4,0.1,0 0,0.5,0
vC 4.43 iˆ 0 ˆj 0 kˆ
AC 0.4, 0.4,0
aC C A vC
AE 0.4 iˆ 0.4 ˆj 0 kˆ
a 0 iˆ 0 ˆj 0 kˆ
vE AE
vE 0 iˆ 3.535 ˆj 3.535 kˆ 0.4 iˆ 0.4 ˆj 0 kˆ
4.43 iˆ 0 ˆj 0 kˆ
m
a 4.43 iˆ 2
s
19. O sistema ilustrado, composto por placas soldadas a um
eixo fixo AB, gira em torno deste, com velocidade angular
constante de = 5 rad/s. No instante ilustrado, o ponto C está
descendo. Pedem-se:
(a) o vetor velovidade angular.
(b) a velocidade do ponto E na forma vetorial.
(c) a aceleração do ponto E na forma vetorial.
y
0.2m
C
GD
x
0
0
0.4
0.1 m
x
m
aE 10 iˆ 5 ˆj 5 kˆ 2
s
y
0.5
0
0.1
z
0
0.5
0
(x,y,z)
(0,0.5,0)
(0,0,0.5)
(0.4,0.1,0)
BA A B BA 0,0.5,0 0,0,0.5
BA 0,0.5, 0.5
BA 0 iˆ 0.5 ˆj 0.5 kˆ
BA 02 0.52 0.5 BA 0.707
2
eˆ
BA
BA
eˆ
E A 0
aE 0 iˆ 0 ˆj 0 kˆ
10 iˆ 5 ˆj 5 kˆ
0.1 m
0.4 m
Pontos
A
B
E
m
vE 1.414 iˆ 1.414 ˆj 1.414 kˆ
s
a E E A vE
a E E A vE
0.4 m
E
F
z
20. Uma pedra de esmeril, de formato cilíndrico, com
raio R = 0.45 m, gira com freqüência constante f0 = 1800 rpm;
quando se desliga o motor elétrico do esmeril, a pedra gasta 10
s até parar; considerando movimento uniformemente variado,
pedem-se:
(a) a aceleração angular α da pedra;
(b) a velocidade de um ponto P da borda da pedra
quando a freqüência é 1800 rpm;
(c) a aceleração de um ponto P da borda da pedra,
quando a freqüência é 1800 rpm.
0 ˆ 0.5 ˆ 0.5 ˆ
i
j
k
0.707
0.707
0.707
eˆ 0 iˆ 0.707 ˆj 0.707 kˆ
eˆ 5 0 iˆ 0.707 ˆj 0.707 kˆ
13
vC 10 iˆ 5 ˆj 5 kˆ
D
B
ˆj
ˆj
iˆ
kˆ
iˆ
vE 0 3.535 3.535 0 3.535
0.4 0.4
0 0.4 0.4
ˆj
ˆj
iˆ
kˆ
iˆ
vE 0
3.535 3.535 0
3.535
1.414 1.414 1.414 1.414 1.414
0.2m
A
z
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
vA vB A RA B RB B
20
rad
20 B 8.89
45
s
B B0 B t
B
R
y
RA
A
RB
8.89 0 B 6.67 B
8.89 rad
6.67 s 2
1.33
vA A RA vA 20 0.02 vA 0.4
x
30
1800
rad
f 1800rpm f
Hz 0 2 f 0 188.5
60
s
0
0 188.5
t
t
10
rad
18.85 2
s
m
vP r vP 188.5 0.45 vP 84.82
s
m
aPN r aPN 188.5 0.45 aPN 15989.1 2
s
aPT 0 é cte
2
2
aPR aPN aPT aPR aPN
21. Dois discos de raios RB = 45 mm e RA = 20 mm
estão em contato sem escorregar.
O disco A(inferior) parte do repouso e acelera de forma
uniforme com aceleração αA = 3 rad/s2. Para o instante em que
a velocidade angular do disco A atinge valor A = 20 rad/s,
pedem-se:
(a) a aceleração angular do disco B.
(b) a velocidade angular do disco B.
(c) a velocidade de um ponto na borda do disco B.
(d) a aceleração de um ponto na borda do disco B.
m
vB
s
m14
aBT B RB aBT 1.33 0.045 aBT 0.05985
aBN
s2
vB2
0.42
m
aBN
aBN 3.55 2
RB
0.045
s
aBR aBN aBT aBR aB2N aB2T
aBR 3.552 0.059852 aBR 3.56
m
s2
22. O disco de raio R = 80 mm parte do repouso e
acelera de maneira uniforme, atingindo a velocidade angular
= 30 rad/s em 10 voltas. Pedem-se:
(a) a aceleração angular do disco;
(b) o tempo gasto nessas 10 voltas iniciais.
80 mm
Disco: MCUVA:
1
0 t t 2
2
2 10 20 rad
B
62.832
2
2 30 0 2 62.831
2
2
0
2
302
rad
7.16 2
2 62.831
s
0 t 30 0 7.16 t
30
t
t 4.19s
7.16
PB
PA
A
Disco A: MCUVA:
A A A t
0
20 0 3 t t
20
s
3
6.67
Disco B:
22. A haste ABCD gira apoiada nas articulações A e D;
no instante ilustrado, a velocidade angular da barra é 95 rad/s,
que decresce à taxa de 380 rad/s2. E o ponto C está subindo.
Pedem-se:
(a) a velocidade do ponto B, para o instante ilustrado;
(b) a aceleração do ponto B, no instante ilustrado.
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
m
vB 0 iˆ 9 ˆj 15 kˆ
s
aB AB vB
ˆj
ˆj
iˆ
kˆ
iˆ
AB 28500 19000 11400 28500 19000
0.3
0
0
0.3
0
A
AB 0 iˆ 3420 ˆj 5700 kˆ
B
200 mm
ˆj
ˆj
iˆ
kˆ iˆ
vB 75 50 30 75 50
0
9 15 0
9
D
z
vB 1020 iˆ 1125 ˆj 675 kˆ
300 mm
x
C
Pontos
A
B
D
x
0
0.3
0.3
y
0.2
0.2
0
aB AB vB
120 mm
z
0.12
0.12
0
aB 0 iˆ 3420 ˆj 5700 kˆ
1020 iˆ 1125 ˆj 675 kˆ
(x,y,z)
(0,0.2,0.12)
(0.3,0.2,0.12)
(0.3,0,0)
m
aB 1020 iˆ 4545 ˆj 5025 kˆ 2
s
DA A D DA 0,0.2,0.12 0.3,0,0
DA 0.3,0.2,0.12
23. O sistema de engrenagens ilustrado, deve
suspender o bloco alçando-o por 6.10 m. A engrenagem A parte
do repouso e, mantendo aceleração angular constante, atinge a
freqüência de 120 rpm em 5 s, mantendo-se constante após
atingí-la. Pedem-se:
(a) o número de rotações da engrenagem;
(b) o tempo gasto na operação.
DA 0.3 iˆ 0.2 ˆj 0.12 kˆ
0.3
DA
eˆ
DA
2
0.22 0.122 DA 0.38
eˆ
DA
0.3 ˆ 0.2 ˆ 0.12 ˆ
i
j
k
0.38
0.38
0.38
Em mm
76.2
B
eˆ 0.789 iˆ 0.5263 ˆj 0.3158 kˆ
Anti-horário:
eˆ 95 0.789 iˆ 0.5263 ˆj 0.3158 kˆ
A
75 iˆ 50 ˆj 30 kˆ rad s
eˆ 380 0.789 iˆ 0.5263 ˆj 0.3158 kˆ
76.2
300 iˆ 200 ˆj 120 kˆ rad s2
457
AB B A AB 0.3,0.2,0.12 0,0.2,0.12
381
AB 0.3,0,0
Engrenagem A:
AB 0.3 iˆ 0 ˆj 0 kˆ
vB AB
vB 75 iˆ 50 ˆj 30 kˆ 0.3 iˆ 0 ˆj 0 kˆ
ˆj kˆ iˆ
ˆj
iˆ
vB 75 50 30 75 50
0.3 0 0 0.3 0
15
A 0 A 2 f A 2
0
A 12.566
A
rad
s
120
60
12.566
rad
A
A 2.513 2
t
5
s
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
rA
A
rB
0.0762
rad
B
12.566 B 2.095
0.457
s
vA vB A rA B rB B
(b) o tempo gasto até parar.
N o MUV o de B percorrido em 5s será:
B2 02 2 B
2 02
2.0952 02
2 B
2 0.419
5.2375rad sB ri
0
B
sB0 0.381 5.2375 sB0 2m
sB rBi B B
16
sB
6.1
B
rBi
0.381
B 16.01rad
2.095
rad
B
B
B 0.419 2
t
5
s
Faltam: 6.1 sB 6.1 2 4.1m
0
Nesses 4.1 m a engrenagem B percorre em velocidade
angular constante; o tempo gasto será de:
s
4.1
2.095 0.381
t
t
4.1
t
t 5.1365s
2.095 0.381
vB B rBi
A polia A gastará 5 s em MUVA e 5.1365 s em MU:
rad
s
A A t A 12.566 5.1365
A 12.566
AMU 64.546rad
Em MUV:
1
AMUV A0 t A t 2
2
1
AMUV 0 t 2.513 52 AMUV 31.4125rad
2
AMU AMUV 64.546 31.4125
R
120
rad
0 12.566
60
s
h
0.8
h R
2.5rad
R
0.32
2 02
F2 02 2 F
2
2
2
0 12.566
rad
31.58 2
2 2.5
s
0 t 0 12.566 31.58 t
12.566
t
t 0.397s
31.58
0 2 f 0 2
25. A figura figura ilustra uma correia que move-se
entre duas polias A e B, de raios RA = 0.06 m e RB = 0.02 m,
respectivamente, sem que ocorra escorregamento entre as
superfícies em contato. A velocidade da correia aumenta
uniformemente, desde v1 = 0.8 m/s até v2 = 2.4 m/s, em 5 s.
Pedem-se: (a) a aceleração angular de cada polia; (b) o número
de voltas efetuadas por cada uma das polias, nos 5 s.
AMU AMUV 95.9585rad
AMU AMUV 95.9585
rev
2
2
AMU AMUV
2
RA
RB
15.27rev
tT tMUV tMU 5 5.1365 tT 10.1365
24. A polia ilustrada na figura possui raio R = 0.32 m
e é acionada por um motor elétrico, com o intuito de suspender
o bloco A. Quando a polia apresenta freqüência de rotação f0 =
120 rpm, o motor é desligado. Mesmo assim, o bloco ainda sobe
h = 0.80 , antes de parar. Pedem-se:
(a) a aceleração angular da polia;
A
v
v
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
v
2.4 0.8
m
ac
ac 0.32
t
5
s
a
ac aA aA A RA A A
RA
0.32
rad
A
A 5.33 2
0.06
s
a
ac aB aB B RB B B
RB
0.32
rad
B
B 16 2
0.02
s
vB
vB B RB B
RB
2.4
rad
B
B 120
0.02
s
vB0
vB0 B0 RB B0
RB
0.8
rad
B0
B0 40
0.02
s
B2 B20
2
2
B B0 2 B B B
2 B
ac
B
t = 0 s), vA0 = 5 m/s. Considerando o intervalo de tempo de 2 s,
pedem-se:
(a) o número de voltas da polia;
(b) as correspondentes velocidade e percurso do bloco
B;
(c) a aceleração centrípeta de um ponto da borda mais
externa da polia (R1 = 1.5 m).
17
R2
vA
R1
13
rad
A
A 8.667
1.5
s
vA0
vA0 A0 R1 A0
R1
5
rad
A0
A0 3.33
1.5
s
a
aA A R1 A A
R1
4
rad
A
A 2.67 2
1.5
s
vA A R1 A
63.7
vA A RA A
A2 A2
2 A A A
2 A
2
A
A2 A2
2
2
A A 2 A A A
2 A
0
0
A
402 13.332
A 133.42rad
2 5.33
A
m
s
vA vA0 aA t vA 5 4 2 vA 13
1202 402
B 400rad
2 16
400
B
rev
2
vA
RA
2.4
rad
A
A 40
0.06
s
vA0
vA0 A0 RA A0
RA
0.8
rad
A0
A0 13.33
0.06
s
R1
133.42
rev
2
21.2
26. Uma polia dupla, de raios R1 = 1.5 m e R2 = 0.8 m,
gira sob ação de dois blocos A e B, conforme ilustrado. O bloco
A apresenta aceleração aA = 4 m/s², com velocidade inicial (em
2
A0
0
8.667 2 3.332
A 11.99rad
2 2.67
11.99
A
rev A 1.91rev
2
vB B R2 vB 8.667 0.8
m
vB 6.93
s
vB0 B0 R2 vB0 B0 R2
A
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
Exercícios
1. Uma polia está conectada por cabos inextensíveis
conforme mostra a figura. O movimento da polia é controlado
pelo cabo C o qual tem uma aceleração constante de 9 in/s2 e
uma velocidade inicial de 12 in/s, ambas para a
direita.Determine:
(a) o número de revoluções executados pela polia em
2 s.
(b) a velocidade e a mudança na posição do corpo B
após 2s.
(c) a aceleração do ponto D da polia interior no
instante t = 0s.
m
s
aB B R2 aB 2.67 0.8
m
aB 2.136 2
s
vB2 vB20
2
2
vB vB0 2 aB sB sB
2 aB
vB0 3.33 0.8 vB0 2.664
sB
acpA
6.932 2.6642
sB 9.58m
2 2.136
vA20
R1
acpA
18
52
m
acpA 16.67 2
1.5
s
27. As engrenagens ilustradas A, B e C, tem
respectivamente raios RA = 0.24 m, RB = 0.16 m e RC = 0.32 m
e apresentam eixos fixos. A engrenagem A gira com velocidade
angular constante A = 5 rad/s, no sentido horário. Pedem-se:
(a) as velocidades angulares das engrenagens B e C;
(b) a aceleração de um ponto periférico da engrenagem
A.
Solução:
RB
RA
vD0 r 0 12 3 0 0 4 rad s
aDt r 9 3 3 rad s 2
14 rad
1 rev
2.23 rev
2 rad
0 t 4 3 2 10 rad s
RC
1
2
1
2
0 t t 2 4 2 3 22 14rad
B 7.50
rad
rad
m
C 3.75
; a 4.5 2
s
s
s
vB r vB 5 10 vB 50 in s
yB r yB 514 yB 70in
aD t aC 9 in s 2
aD n rD 02 aD n 3 42 aD n 48 in
tan
48
48
arctan 79.4
9
9
aD sen79.4 48 aD
48
in
aD 48.8 2
sen79.4
s
s2
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
2. O movimento de um corpo é dado por:
tan
t t 3 9 t 2 15 t SI .
Determine a posição angular, a velocidade angular e a
aceleração angular nos instantes:
(a) t = 0 s (b) t =3s.
aN B
aTB
arctan
tan
37.5
9
37.5
76.50
9
3. No problema anterior, determine a posição angular
e a aceleração nos instantes em que a velocidade angular se
anula.
6. A vara dobrada ABCDE gira sobre uma linha que
une os pontos A e E com uma velocidade angular constante de
9 rad/s. Sabendo que a rotação observada do ponto E é no
sentido horário, determine a velocidade e a aceleração de C.
4. A cinta conecta as rodas do auto. O eixo B possui
aceleração angular constante de 120 rad/s2 em sentido antihorário, Ela está inicialmente em repouso, Determine a
aceleração da cinta no ponto C, quando:
(a) t = 0.5 s
(b) t = 2s.
19
5. Uma série de componentes pequenos estão
sendo movidos por um transportador. O cinto passa por
uma polia tensora de 6 in de raio. No instante mostrado,
a velocidade do ponto A é 15 in/s para a esquerda e sua
aceleração vale 9 in/s2 para a direita.
Determinar:
(a) a velocidade angular e aceleração angular
da polia,
(b)
a
aceleração
total
da
máquina
componente em B.
Obs.:
AC CE AE eˆ
AE
AE
ê
AC AC AE CE
EC CE
AC AE EC AE EC
0 pois AE
AC EC
Logo, tanto faz escolher o ponto A ou E!!!
A (0,0.4,0.2); C(0,0.15,0); E(0.4,0,0)
vB
15
rad
B B 2.5
r
6
s
aTB
9
rad
aTB r
1.5 2
r
6
s
2
2
v
15
in
aN B B aN B
aN B 37.5 2
r
6
s
rAC C A
rAC (0,0.15,0) (0,0.4,0.2)
rAC 0 iˆ 0.25 ˆj 0.2 kˆ
vB r B
aB aN2 B aT2B
B
aNB
aTB
aB 37.52 92
in
aB 38.6 2
s
nˆ EA
EA
EA
EA A E EA 0,0.4,0.2 0.4,0,0
AE 0.4 iˆ 0.4 ˆj 0.2 kˆ
AE
0.4
nˆ AE
2
0.42 0.22 AE 0.6
0.4 ˆ 0.4 ˆ 0.2 ˆ
i
j
k
0.6
0.6
0.6
nˆEA
0.4 ˆ 0.4 ˆ 0.2 ˆ
i
j
k
0.6
0.6
0.6
6 iˆ 6 ˆj 3 kˆ
9
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
vC r
vC 6 iˆ 6 ˆj 3 kˆ 0 iˆ 0.25 ˆj 0.2 kˆ
ˆj
ˆj
iˆ
kˆ iˆ
vC 6
6
3 6
6
0 0.25 0.2 0 0.25
vC 6 0.2 0.25 3 iˆ 1.2 ˆj 6 0.25 kˆ
v 0.45 iˆ 1.2 ˆj 1.5 kˆ m s
C
aC vC
ˆj
ˆj
iˆ
kˆ iˆ
aC 6
6
3 6
6
0.45 1.2 1.5 0.45 1.2
aC 12.6 iˆ 7.65 ˆj 9.9 kˆ m s 2
7. A aceleração angular de um disco oscilando é
definida pela relação:
k
Determine:
(a) o valor de k para o qual = 8 rad/s quando = 0 e
= 4 rad quando = 0.
(b) a velocidade angular do disco quando = 3 rad.
(a) 4 s-2 (b) 5.29 rad/s
8. Resolva o problema 2 encontrando a posição
angular e a aceleração angular quando a velocidade angular for
nula.
9. No problema 6, determine a velocidade e a
aceleração do ponto B. Assuma que a velocidade angular é 9
rad/s e aumenta a uma taxa de 45 rad/s2.
10. A Terra faz uma volta completa a cada 23h e 56
min. Sabendo que o seu raio é 3960 mi, determine a velocidade
linear e a aceleração linear em um ponto sobre o equador.
11. O anel C possui raio interno de 55 mm e raio
externo de 60 mm e está posicionado entre duas rodas A e B,
cada uma de raio externo de 24 mm. Sabendo que a roda A gira
com freqüência 300 rpm e que não ocorre deslizamento,
determine:
(a) a velocidade angular do anel C e da roda B.
(b) a aceleração dos pontos A e B que estão em contato
com C.
vA A rA vA vCext C rCext
A rA C rC 2 f A rA 2 fC rC
ext
ext
f r
300 24
fC A A fC
fC 120 rpm
rCext
60
B rB C rC 2 fB rB 2 fC rC
fB
fC rCint
rB
int
int
fB
20
120 55
f B 275 rpm
24
vA2
aA rA aA
rA
300
vA 2 f A rA vA 2
0.024
60
m
vA 0.754
s
2
0.754
m
aA
a A 23.7 2
0.024
s
275
vB 2 f B rB vB 2
0.024
60
m
vB 0.6911
s
v2
aB B2 rB aB B
rB
2
A
aB
0.69112
m
aB 19.9 2
0.024
s
12. Um cilindro A está se movendo para baixo a uma
velocidade de 9 ft/s quando um breque é aplicado
repentinamente no tambor. Sabendo que o cilindro se move 18
ft para baixo antes de parar, e, assumindo movimento com
aceleração uniforme, determine:
(a) a aceleração angular da roda.
(b) o tempo que leva para o cilindro parar.
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
vA A rA A
vA
9
rad
A
A 12
rA
0.75
s
2 02 2
s
18
24 rad
r
0.75
122
rad
02 122 2 24
3 2
48
s
1
0 0 t t 2
2
1
24 0 12 t 3 t 2
2
2
2
3 t 24 t 48 0 t 8 t 16 0
15. O anel B tem um raio interno r2 e externo r3. A
barra A de raio r1 gira com velocidade angular constante A.
Não há escorregamento entre as superfícies. Determine as
relações entre os raios r1, r2, r3 e A para: (a) a velocidade
angular do anel B; (b) a aceleração dos pontos entre a barra A e
o anel B que estão em contato.
s r
t
b b 4 a c
8 64 64
t
t 4s
2 a
2
2
13. Uma polia e dois pesos são conectados por uma
corda inextensível. O peso A tem uma aceleração constante de
300 mm/s2 e uma velocidade inicial de 240 mm/s, ambos
dirigidos para cima. Determine:
(a) o número de revoluçõe executados pela polia em 3 s.
(b) a velocidade e a posição do peso B após 3s.
(c) a aceleração do ponto D na borda da polia, em t = 0s.
21
16. Um disco circular de raio r = 0.16 m gira em
relação a um eixo fixo O com velocidade angular = 2 rad/s e
aceleração angular = 3 rad/s2 com sentidos indicados na
figura. Determine os valores instantâneos da velocidade e da
aceleração no ponto A da figura.
y
14. Uma chapa circular está inicialmente em repouso.
Sabendo que r = 200 mm e que a placa possui aceleração
angular constante de 0.3 rad/s2, determine a magnitude da
aceleração total no ponto B quando:
(a) t = 0, (b) t = 2 s, (c) t = 4 s.
r
4
O
x
r
A
rA OA r cos
iˆ r sen ˆj
cos
1
1
sen 1 cos2 sen 1
4
4
sen
15
sen 0.968
4
rA r 0.25 iˆ r 0.968 ˆj
rA 0.16 0.25 iˆ 0.16 0.968 ˆj
2
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
rA 0.04 iˆ 0.15488 ˆj
kˆ 2 kˆ
vA rA
v A 2 kˆ 0.04 iˆ 0.15488 ˆj
vA 2 0.04 kˆ iˆ 2 0.15488 kˆ ˆj
ˆj
iˆ
vA 0.08 ˆj 0.30976 iˆ vA 0.30976 iˆ 0.08 ˆj
kˆ 3 kˆ
19. O ponto A da polia está na posição angular = 0
em t = 0s. O disco tem velocidade angular inicial 0 = 0.1 rad/s
em t = 0 e é acelerado com uma aceleração angular constante
= 2 rad/s2. Determine a velocidade e a aceleração do ponto A,
no instante t = 1 s, em função dos vetores unitários iˆ e
ĵ .
aA rA vA
a A 3 kˆ 0.04 iˆ 0.15488 ˆj
22
a A 0.12 kˆ iˆ 0.4646 kˆ ˆj
0.6194 kˆ iˆ 0.16 kˆ ˆj
20. Uma fita magnética utilizada para gravar dados em
um computador consiste no sistema indicado.
2 kˆ 0.30976 iˆ 0.08 ˆj
0.6194 ˆj 0.16 iˆ
a A 0.12 ˆj 0.4646 iˆ
aA 0.12 ˆj 0.4646 iˆ
0.6194 ˆj 0.16 iˆ
a A 0.3046 iˆ 0.739 ˆj
17. Para testar a resistência de um adesivo, é colocado
um bloco de massa m = 0.3 kg em um disco que gira a partir do
repouso em t = 0 s com aceleração angular uniforme = 2
rad/s2. Se a fita se solta depois de 3 s do movimento do disco,
quantas voltas o disco execuitará?
Se a velocidade v da fita é constante e a magnitude da
aceleração do ponto A é 4/3 a aceleração do ponto B, determine
o raio de A.
21. As características de um sistema de engrenagens é
ilustrado a seguir:
18. A correia acoplada ao conjunto de polias faz girar
o sistema aumentando sua velocidade angular. Num certo
instante, a velocidade da correia é 1.5 m/s e a aceleração total
do ponto A é 75 m/s2.Para esse instante, determine:
(a) a velocidade angular e a aceleração angular da
polia B. (b) a aceleração total do ponto B.
(c) a aceleração do ponto C.
A engrenagem B está girando no sentido horário, com
300 rev/min, quando um torque é aplicado na engrenagem A,
em t = 2 s, forçando-a a girar no sentido anti-horário com uma
aceleração angular que varia com o tempo conforme o gráfico
indicado, durante 4 s. Determine a velocidade da polia B,
quando t = 6 s.
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
23. A potência de um motor elétrico quando ligado o
faz girar a 3300 rpm em 6 s, e quando é desligado ele retorna
ao repouso em 80 s. Assumindo aceleração uniforme, determine
o número de revoluções dado pelo motor quando:
(a) é ligado e atinge a máxima rotação;
(b) é desligado a partir da máxima rotação até atingir
o repouso.
23
1 rad/s 0.318 mm/s
24. Assumindo que a Terra gira em torno de seu eixo
em 23h e 56 min e seu raio é aproximadamente 6400 km,
determine a velocidade de rotação sobre um ponto da superfície
do Equador. E num ponto na latitude de 400 N?
25. No sistema de polias abaixo, o disco B está em
repouso quando é colocado em contato com o disco A que está
girando no sentido horário a 450 rpm. Após 6 s de
deslizamento, cada disco tem uma aceleração angular constante
e o disco A possui uma freqüência de 140 rpm no sentido
horário. Determine a aceleração angular de cada disco durante
o período de deslizamento.
27. O cordão de diâmetro d é enrolado em torno
do tambor afunilado que tem as dimensões ilustradas. Se
o tambor está girando a uma taxa constante de ,
determinar a aceleração para cima do bloco. Negligenciar
o pequeno deslocamento horizontal do bloco.
r2 – r1
r - r1
26. Devido ao parafuso em E, o atuador fornece
movimento linear para o braço em F quando o motor gira a
engrenagem em A. Se as engrenagens têm os raios listados na
figura e o parafuso em E tem um passo de p = 2 mm, determine
a velocidade em F quando o motor gira a A 20 rad s .
Sugestão: O passo do parafuso indica a quantidade de avanço
do parafuso para cada volta completa.
r2
r
x
r1
L
r r1 x
r2 r1 L
r r1 r2 r1
x
L
d
2
d
x nd x
dx 1
d
dt 2 dt
r r1 r2 r1
x
L
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
dr
1 dx
r2 r1
dt
L dt
dv d
dr
v r
r
dt dt
dt
dv
dr
0 r
dt
dt
dv
dr
dt
dt
dv
1 dx
r2 r1
dt
L dt
dv
1 1 d
r2 r1
d
dt
L 2 dt
a
r2 r1
a
d
2
L
24
Ponto P de contato de A e B:
2
28. O mecanismo é utilizado para converter o
movimento circular de constante da haste AB no movimento
de translação da haste CD na fenda vertical anexa. Determine a
velocidade e aceleração de CD para qualquer ângulo de AB.
vP A rA B rB
2 f A rA 2 f B rB f A rA f B rB
r
25
fB A f A fB
3000 f B 750rpm
rB
100
750
rad
fB
Hz B 2 f B B 26
60
s
81.68
13
Eixo do motor é o mesmo da enfrenagem A: n = 200
A 2 n A 2 200 A 400 rad
1256.64
A2 A2
2 A A A
2 A
2
A
2
A0
0
A 2 f A A 2
A
x l cos
dx
d
l sen
dt
dt
v l sen
dv
d
d
a
l cos
l sen
dt
dt
dt
2
a l cos
29. O motor gira a engrenagem A de modo que
sua freqüência aumenta uniformemente de zero a 3000
rev/min depois que o eixo gira 200 rev. Determine a
velocidade angular da engrenagem D quando t = 3 s. Os
raios das engrenagens A, B, C e D são:
rA = 25 mm, rB = 100 mm, rC = 40 mm e rD = 100 mm,
respectivamente.
B
3000
rad
A 100
60
s
314.2
314.22 02
rad
A 39.28 2
2 1256.64
s
aTP A rA B rB
rA
25
rad
A B
39.28 B 9.82 2
rB
100
s
Mesmo eixo C e B:
Em t = 3s:
B B B t B 0 9.82 3
0
rad
s
rad
B C 29.46
s
rad
C B 9.82 2
s
B 29.46
Ponto P´ de contato de C e D:
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
vP D rD C rC
r
40
rad
D C C D
29.46 D 11.784
rD
100
s
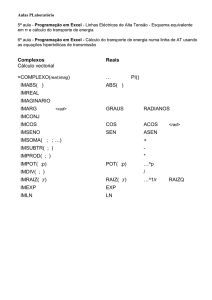
30. A manivela AB está girando a uma velocidade
angular constante de = 150 rad/s. Determine a velocidade do
pistão P no instante em que = 30 °.
25
x 0.2 cos 0.752 0.2 sen
2
x 0.2 cos 0.752 0.04 sen2
x 0.2 cos 0.75 0.04 sen
2
2
1
2
1
1
dx
d 1
d
0.2 sen
0.752 0.04 sen2 2 0.04 2 sen cos
dt
dt 2
dt
dx
d 1
0.2 sen
dt
dt 2
0.08 sen cos
0.75
d
dt
1
2
0.04 sen 2 2
dx
sen cos
0.2 sen 0.04
dt
0.752 0.04 sen2
Pois
d
; Para = 300 e = 150 rad/s:
dt
dx
sen300 cos300 150
0.2 sen300 150 0.04
dt
0.752 0.04 sen2 300
dx
64.951
2.598
15 0.04
15
dt
0.7433
0.5625 0.01
dx
ft
15 3.4952 v 18.49
dt
s
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
Movimento Plano Geral
Um movimento plano geral pode ser considerado
como a soma de uma translação e de uma rotação:
Movimento geral =
Translação
+
Rotação
26
Observe que:
Movimento de um corpo decomposto em uma
translação e uma rotação:
Velocidade absoluta e relativa:
vB vA vB/ A
v
vB vA tg vB/ A l B/ A
l
vA
vA
cos
vB / A
vB / A
cos
vA
l cos
Chega-se ao mesmo resultado escolhendo B como
pono de referência. Decompondo-se o movimento dado em
uma translação com B e uma rotação ao redor de B (vide figura),
teremos:
vB : velocidade absoluta do ponto B.
v A : translação da placa com A.
vB / A : velocidade relativa associada à rotação da placa
ao redor do ponto A, medida em relação a eixos com origem em
A e de orientações fixas. Denotando por :
rB/ A : vetor de posição de B em relação a A:
rB/ A B A
Movimento plano = Translação com B + Rotação em torno de B.
k̂ : velocidade angular em relação aos eixos de
orientações fixas.
vB / A kˆ rB / A
vB vA kˆ rB / A
vA vB vA/ B
Observe que:
vA/ B vB / A vA/ B vB / A l
Movimento plano = Translação com A + Rotação em torno de A.
O sentido da velocidade relativa deponde do ponto de
referência escolhido e deverá ser cuidadosamente determinada
a partir dos diagramas ilustrados. Finalmente, observemos que
a velocidade angular da barra em sua rotação ao redor de B é
a mesma que em sua rotação ao redor de A. Em ambos os casos
é medida pela derivada temporal do ângulo :
d
dt
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
Este resultado é geral; assim, sempre a velocidade
angular de um corpo rígido animado de movimento plano
é independente do ponto de referência.
A maior parte dos mecanismos mecânicos constam
não de um, mas de vários elementos em movimento. Quando
tais elementos se encontram articulados, pode-se estudá-los
considerando cada um como um corpo rígido, sem, contudo,
esquecer que os pontos de articulação de dois deles devem ter a
mesma velocidade absoluta. Um estudo semelhante pode ser
feito quando se trata de engrenagens, já que os dentes em
constato devem ter a mesma velocidade absoluta. Entretanto, se
os elementos de um mecanismo possuem um deslizamento
relativo entre si, deve-se levar em consideraçãoa velocidade
relativa das partes em contato.
Exemplos resolvidos
1. A engrenagem dupla mostrada na figura rola sobre
a cremalheira inferior estacionária; a velocidade do seu centro
A é de 1.2 m/s para a direita. Determinar:
(a) a velocidade angular da engrenagem,
(b) as velocidades da cremalheira superior R e do
ponto D da engrenagem.
Assim, a velocidade da cremalheira superior é a
velocidade do ponto B:
vR vB vB vA vAB
vB vA rAB
vB 1.2 iˆ 8 kˆ 0.1 ˆj
iˆ
vB 1.2 iˆ 0.8 kˆ ˆj
m
vB 1.2 iˆ 0.8 iˆ vB 2.0 iˆ
s
Velocidade do ponto D:
vD vA rAD
vD 1.2 iˆ 8 kˆ 0.15 iˆ
27
ˆj
vD 1.2 iˆ 8 0.15 kˆ iˆ
m
vD 1.2 iˆ 1.2 ˆj
s
m
vD 1.22 1.22 vD 2.88 1.7
s
tan 1 45
m
m
vD 1.2 iˆ 1.2 ˆj vD 1.7 45
s
s
Como a engrenagem rola sobre a cremalheira inferior,
seu centro A percorrerá uma distância igualao comprimento da
circunferência exterior, 2r1, para cada rotação completa da
engrenagem. Como 1 ver = 2 rade, quando A rola para a
direita, (xA > 0), a engrenagem gira em sentido horário ( < 0),
escrevemos:
xA r1
dxA
d
r1
vA r1
dt
dt
v
1.2
rad
A
8
r1
0.150
s
rad
kˆ 8 kˆ
s
O rolamento é decomposto em dois movimentos: um
de translação do centro A e outro de rotação ao redor deste
centro. Na translação, todos os pontos da engrenagem
deslocam-se com a mesma velocidade va. Na rotaça, cada ponto
P da engrenagem se desloca ao redor de A com velocidade:
vP rAP rAP P A
Aqui rPA é o vetor de posição de P em relação a A.
2. No sistema esboçado, a manivela AB possui uma
velocidade angular constante de 2000 rpm (freqüência f) no
sentido horário. Determinar para a posição da manivela
indicada na figura:
(a) a velocidade angular da biela BD.
(b) a velocidade do pistão P.
Cinemática dos Sólidos – Prof. Cláudio S. Sartori
Notas de aula 01 – 1° Bimestre
f 2000rpm f 2000
2 f
1
100
Hz f
Hz
60
3
200 rad
rad
209.45
3
s
s
vAB r AB vAB 0.0762 209.45
m
vAB 15.95 500
s
Movimento da Biela BD:
Aplicando a lei dos senos:
sen
sen40
sen40
sen 0.0762
0.0762 0.203
0.203
sen 0.241 arcsen0.241 13.96
Observe que a velocidade vD do ponto D, onde a biela
se une ao pistão, deve ser horizontal. Decompondo o
movimento de BD:
Movimento plano de BD= Translação + rotação
vD vB vDB
Fazendo o diagrama vetorial dessa relação:
vD
v
vB
DB
sen53.9 sen50 sen76.1
vD
v
15.9
15.9
DB
vDB sen50
sen53.9 sen50 sen76.1
sen76.1
m
vDB 12.5 76.1°
s
15.9
m
vD sen53.9
vD 13.2
sen76.1
s
28