em E 3, em")
Q1. Considere um sistema de coordenadas Σ = (O, E) em E 3 , em que E é
uma base ortonormal de V 3 . Sejam π1 e π2 os planos dados pelas equações
π1 : x − 2y + 3z = 1
e
π2 : x + z = 2
no sistema de coordenadas Σ. Seja r a reta dada pela interseção de π1 e π2
e seja s a reta que passa pelo ponto que tem coordenadas (1, 1, 1) no sistema
Σ e é paralela ao vetor que tem coordenadas (1, 0, 1) na base E. A distância
entre as retas r e s é igual a:
(a)
(b)
√1 ;
6
1
;
6
1
2;
(c)
(d) 1;
(e) √12 .
Q2. Seja fixada uma orientação no espaço E 3 . Considere as seguintes afirmações:
(I) ~v · (w
~ ∧ ~z ) = w
~ · (~z ∧ ~v ), para quaisquer ~v , w,
~ ~z ∈ V 3 ;
(II) ~v ∧ (~v ∧ w)
~ = ~0, para quaisquer ~v , w
~ ∈ V 3;
(III) (λ~v ) ∧ w
~ = λ(~v ∧ w),
~ para quaisquer ~v , w
~ ∈ V 3 e qualquer λ ∈ R.
Assinale a alternativa correta:
(a)
(b)
(c)
(d)
(e)
apenas as afirmações (II) e (III) são verdadeiras;
apenas as afirmações (I) e (III) são verdadeiras;
apenas as afirmações (I) e (II) são verdadeiras;
apenas a afirmação (I) é verdadeira;
todas as afirmações são verdadeiras.
Q3. Sejam n um inteiro positivo e V um espaço vetorial de dimensão n.
Considere as seguintes afirmações:
(I) se um subconjunto B de V com n elementos gera V , então B é uma
base de V ;
(II) dados um inteiro positivo k menor ou igual a n e vetores dois a
dois distintos v1 , v2 , . . . , vk ∈ V , vale que a dimensão do subespaço
[v1 , v2 , . . . , vk ] é igual a k;
(III) se A e B são subconjuntos linearmente independentes de V que geram o mesmo subespaço de V , então A e B têm o mesmo número
de elementos.
Assinale a alternativa correta:
(a)
(b)
(c)
(d)
(e)
apenas a afirmação (I) é necessariamente verdadeira;
apenas as afirmações (I) e (II) são necessariamente verdadeiras;
apenas a afirmação (III) é necessariamente verdadeira;
todas as afirmações são necessariamente verdadeiras;
apenas as afirmações (I) e (III) são necessariamente verdadeiras.
Q4. Sejam ~v , w
~ ∈ V 3 vetores não nulos. Considere as seguintes afirmações:
~ = λ proj~v w,
~ para todo λ ∈ R;
(I) proj~v (λw)
~ = λ proj~v w,
~ para todo λ ∈ R não nulo;
(II) projλ~v w
~ = ~v se, e somente se, os vetores ~v e w
~ são linearmente de(III) proj~v w
pendentes.
Assinale a alternativa correta:
(a)
(b)
(c)
(d)
(e)
apenas as afirmações (I) e (II) são necessariamente verdadeiras;
apenas a afirmação (I) é necessariamente verdadeira;
todas as afirmações são necessariamente verdadeiras;
apenas as afirmações (II) e (III) são necessariamente verdadeiras;
apenas as afirmações (I) e (III) são necessariamente verdadeiras.
Q5. Considere a matriz
0 −1
A=
1 0
e os subespaços de M2 (R) definidos por:
S1 = B ∈ M2 (R) : AB = BA
e S2 = B ∈ M2 (R) : AB = −BA .
Assinale a alternativa correta:
(a)
(b)
(c)
(d)
(e)
dim(S1 ∩ S2 ) = 2 e dim(S1 + S2 ) = 3;
dim(S1 ∩ S2 ) = 1 e S1 + S2 = M2 (R);
dim(S1 ∩ S2 ) = 1 e dim(S1 + S2 ) = 3;
S1 ∩ S2 = {0} e S1 + S2 = M2 (R);
S1 ∩ S2 = {0} e dim(S1 + S2 ) = 3.
Q6. Seja B = {~e1 , ~e2 , ~e3 } uma base de V 3 . Assinale a alternativa em que a
base C tenha a mesma orientação que B:
(a)
(b)
(c)
(d)
(e)
C
C
C
C
C
= {~e2 − ~e1 , ~e3 − ~e2 , −~e3 };
= {~e3 , ~e2 , ~e1 };
= {~e1 + ~e2 , ~e2 − ~e3 , 2~e3 };
= {−~e2 , −~e3 , −~e1 };
= {~e3 , −~e1 , ~e2 }.
Q7. Seja m ∈ R e considere
(
1 0
A=
−1 1
o subconjunto
)
0
0 0 m
2 0 m
,
,
0
1 0 1
−1 m 1
do espaço vetorial M2×3 (R). Temos que A é linearmente independente se, e
somente se:
(a)
(b)
(c)
(d)
(e)
m 6= 2;
m 6= 1;
m = 1;
m 6= 0;
m = 2.
Q8. Seja a ∈ R e considere o subconjunto
B = {1 + at + t2 , a − t2 , a + 1 + a2 t, 1 − at2 }
do espaço vetorial P2 (R). Temos que B gera P2 (R) se, e somente se:
(a)
(b)
(c)
(d)
(e)
a 6= 1;
a 6= 0 e a 6= −1;
a 6∈ {0, 1, −1};
a 6= 1 e a 6= −1;
a 6= 0 e a 6= 1.
Q9. Seja V o espaço vetorial das funções f : R → R e considere os elementos
de V definidos por
f1 (x) = sen(2x),
2
f4 (x) = sen x,
f2 (x) = x sen x,
2
f5 (x) = cos x
f3 (x) = 1 + sen x cos x,
e
f6 (x) = cos(2x),
para todo x ∈ R. A dimensão do subespaço de V gerado por
{f1 , f2 , f3 , f4 , f5 , f6 }
é igual a:
(a)
(b)
(c)
(d)
(e)
5;
3;
4;
2;
6.
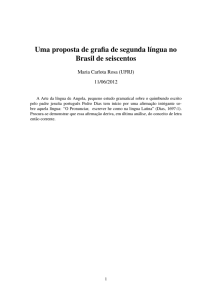
Q10. Considere no espaço E 3 um cubo cujos vértices são A, B, C, D, E,
F , G, H, em que ABCD, ADHE e ABF E são faces desse cubo, como
ilustrado na figura abaixo:
H
G
F
E
D
A
C
B
Seja M o ponto médio do segmento CG e considere a base de V 3 dada por:
−−→ −−→ −−→
B = BH, CF , DM .
−−→
A soma das coordenadas do vetor DF na base B é igual a:
(a) 1;
(b) 75 ;
(c)
3
2;
(d) − 13 ;
(e)
7
2.
Q11. Seja A uma matriz real 5 × 5 tal que det(A) = −1 e denote por At a
sua transposta. Se B = −2A7 At , então det(B) é igual a:
(a)
(b)
(c)
(d)
(e)
−2;
−32;
128;
32;
2.
Q12. Seja ABCD um tetraedro no espaço E 3 e considere os vetores:
−−→
−→
−−→
~v = AB, w
~ = AC e ~z = AD.
Suponha o espaço E 3 orientado de modo que a base {~v , w,
~ ~z } seja positiva.
Se o volume do tetraedro ABCD é igual a 3, então o produto misto
[~v + ~z, ~v − 2w,
~ ~z ]
é igual a:
(a)
(b)
(c)
(d)
(e)
−6;
3;
36;
6;
−36.
Q13. Seja ABC um triângulo equilátero de lado unitário no espaço E 3 e
−−→
−→
considere uma base B = {~e1 , ~e2 , ~e3 } de V 3 em que ~e1 = AB, ~e2 = AC e ~e3
seja um vetor ortogonal a ~e1 e a ~e2 tal que k~e3 k = 2. Se ~v é o vetor com
coordenadas (1, 1, 1) na base B e w
~ é o vetor com coordenadas (−1, 0, 1) na
base B, então ~v · w
~ é igual a:
(a) − 21 ;
(b) 52 ;
(c) 0;
(d) 1;
(e) 12 .
Q14. Considere um sistema de coordenadas Σ = (O, E) em E 3 , em que E é
uma base ortonormal de V 3 . Sejam r e s as retas dadas pelas equações
z−1
y+1
r :x−1=y =
e
s:x+3=
=z
2
2
no sistema de coordenadas Σ. Seja π o plano que passa pela origem O e que
é paralelo às retas r e s. A distância do ponto que tem coordenadas (1, 1, 1)
no sistema Σ ao plano π é igual a:
(a)
√1 ;
5
1
5;
(b)
(c) 1;
1
(d) 11
;
(e)
√1 .
11
Q15. Seja m ∈ R e considere o sistema linear homogêneo em 5 incógnitas
reais cuja matriz de coeficientes é:
1 0 0
1
1
1 0 m
1
2 .
2
2 0 m m+1 3
Seja S ⊂ R5 o conjunto solução desse sistema. Assinale a alternativa correta:
(a)
(b)
(c)
(d)
(e)
dim(S) = 2
dim(S) = 3
dim(S) = 3
dim(S) = 3
dim(S) = 2
se,
se,
se,
se,
se,
e
e
e
e
e
somente
somente
somente
somente
somente
se,
se,
se,
se,
se,
m = 1;
m = 1;
m = 0 ou m = 1;
m = 0;
m = 0 ou m = 1.
Q16. Considere um sistema de coordenadas Σ = (O, E) em E 3 , em que E
é uma base ortonormal de V 3 . Seja π o plano que passa pelo ponto que
tem coordenadas (−1, 0, 1) no sistema Σ e que é normal ao vetor que tem
coordenadas (1, 2, 1) na base E. Dado a ∈ R, temos que o ponto que tem
coordenadas (a, 2, a) no sistema Σ pertence a π se, e somente se:
(a)
(b)
(c)
(d)
(e)
a = −2;
a = 0;
a = 1;
a = −1;
a = 2.
 em E 3, em")