UNIVERSIDADE FEDERAL DE SÃO CARLOS
Centro de Ciências Exatas e de Tecnologia
Departamento de Matemática
Trabalho de Conclusão de Curso B
Relatório Final
“O Grupo Fundamental”
Aluna: Laís Alegria dos Santos.
Orientador: Prof. Dr. João Nivaldo Tomazella.
São Carlos 2010
Identificação
Local de desenvolvimento:
UNIVERSIDADE FEDERAL DE SÃO CARLOS
Centro de Ciências Exatas e de Tecnologia
Departamento de Matemática
Aluna: Laís Alegria dos Santos - RA: 299871
Aluna do Curso Bacharelado e Licenciatura em Matemática
Orientador: Prof. Dr. João Nivaldo Tomazella
Professor Associado do Departamento de Matemática
Disciplina: Trabalho de Conclusão de Curso B
Professores responsáveis: Liane Bordignon
Ivo Machado da Costa
Vera Lúcia Carbone
Título do Projeto: O Grupo Fundamental
Período do projeto: Agosto/2010 a Dezembro/2010
São Carlos, 30 de Novembro de 2010.
Laís Alegria dos Santos.
Prof. Dr. João Nivaldo Tomazella.
“Jamais considere seus estudos como uma obrigação,
mas como uma oportunidade invejável para aprender a
conhecer a influência libertadora da beleza do reino do
espírito, para seu próprio prazer pessoal e para proveito
da comunidade à qual seu futuro trabalho pertencer.”
Albert Einstein
Agradecimentos
Agradeço a Deus que me permitiu estar aqui e a todos que, direta ou indiretamente, me ajudaram a desenvolver este trabalho, alcançando uma nova etapa
e encerrando mais este ciclo.
Resumo
Este relatório é o fechamento do projeto desenvolvido durante o segundo semestre de 2010 sobre o Grupo Fundamental. Nele, apresentamos os principais
tópicos estudados, destacando definições, teoremas, proposições, exemplos e aplicações.
Palavras-chave: Homotopia e grupo fundamental.
Sumário
Introdução
8
1 Pré-requisitos
9
2 Homotopia
13
2.1
Aplicações Homotópicas . . . . . . . . . . . . . . . . . . . . . . .
13
2.2
Espaços Contráteis . . . . . . . . . . . . . . . . . . . . . . . . . .
18
2.3
Homotopia de Caminhos . . . . . . . . . . . . . . . . . . . . . . .
19
3 O Grupo Fundamental
26
3.1
O homomorfismo induzido . . . . . . . . . . . . . . . . . . . . . .
28
3.2
Espaços simplesmente conexos . . . . . . . . . . . . . . . . . . . .
32
4 Exemplos e Aplicações
35
4.1
O grupo fundamental do círculo . . . . . . . . . . . . . . . . . . .
35
4.2
O número de voltas de uma curva plana fechada . . . . . . . . . .
40
4.3
O número de voltas expresso como integral curvilínea . . . . . . .
43
Conclusões
48
Bibliografia
49
Lista de Figuras
1.1
Espaço de Hausdorff X . . . . . . . . . . . . . . . . . . . . . . . .
12
2.1
Quando 0 pertence ao segmento [f (x), g(x)]. . . . . . . . . . . . .
14
2.2
Quando |f (x) − g(x)| < |f (x)|, o segmento de reta [f (x), g(x)] não
contém a origem 0. . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3
15
Quando t varia entre 0 e 1, H(x, t) descreve o arco de círculo
máximo que liga f (x) a g(x). . . . . . . . . . . . . . . . . . . . .
15
2.4
Transitividade . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
2.5
Homotopia de caminhos . . . . . . . . . . . . . . . . . . . . . . .
20
2.6
Homotopia de caminhos fechados . . . . . . . . . . . . . . . . . .
20
2.7
O caminho produto a ∗ b . . . . . . . . . . . . . . . . . . . . . . .
21
2.8
Operação produto nas classes de homotopia de caminhos . . . . .
22
2.9
Homotopia de caminhos . . . . . . . . . . . . . . . . . . . . . . .
22
2.10 Gráfico de f : I → I . . . . . . . . . . . . . . . . . . . . . . . . .
24
2.11 Associatividade . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
3.1
Isomorfismo γ . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
3.2
Caminhos livremente homotópicos . . . . . . . . . . . . . . . . . .
29
3.3
Retração de um quadrado sobre sua base horizontal . . . . . . . .
30
3.4
Diagrama comutativo . . . . . . . . . . . . . . . . . . . . . . . . .
31
3.5
Diagrama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
4.1
Toro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
7
Introdução
A noção de grupo fundamental, conhecida e utilizada atualmente, deve-se a
Henri Poincaré (1854-1912) - matemático francês tido como o último contribuidor
para o progresso de todos os ramos importantes da Matemática.
Em Topologia, uma questão basilar é determinar quando dois espaços topológicos são, ou não, homeomorfos. Todavia, não existem métodos específicos para
solucionar tal questão, exceto algumas técnicas que podem ser aplicadas em casos
particulares. O grupo fundamental surge, então, como uma destas técnicas.
Neste contexto, o objetivo deste trabalho é apresentar um estudo do grupo
fundamental e mostrar que este grupo é um invariante topológico, isto é, se dois
espaços topológicos são homeomorfos, eles possuem o mesmo grupo fundamental.
Iniciamos com uma revisão de alguns conceitos básicos de topologia. Em seguida, apresentaremos a teoria de homotopia - ferramenta essencial para o estudo
do grupo fundamental. O terceiro capítulo é destinado ao grupo fundamental e
suas particularidades, incluindo alguns resultados relacionados a ele. Para finalizar, apresentaremos alguns exemplos e aplicações do grupo fundamental.
8
Capítulo 1
Pré-requisitos
Inicialmente, destacaremos alguns conceitos topológicos que nos acompanharão no decorrer deste trabalho. Algumas demonstrações, porém, não serão feitas,
detalhadamente, pois fogem do nosso objetivo central.
As informações que serão oferecidas aqui foram baseadas, principalmente, em
[3], [4] e [5].
Definição 1.1. Um espaço topológico X é um conjunto onde faz-se uma escolha
de uma parte σ ⊂ ℘(X) = {todas as partes de X}. Esta parte σ é chamada uma
topologia em X se:
1. ∅ e X pertencem a σ;
2. Se A1 , ..., An ∈ σ, então A1 ∩ ... ∩ An ∈ σ;
3. Dada uma família arbitrária (Aλ )λ∈L , com Aλ ∈ σ para cada λ ∈ L, tem-se
S
λ∈L Aλ ∈ σ.
O espaço topológico em questão é o par (X, σ) e cada elemento de σ é dito
um aberto da topologia.
Exemplo 1.1. Dado um conjunto X qualquer, temos duas topologias extremas:
• topologia caótica: σ = {∅, X};
• topologia discreta: σ = ℘(X).
Exemplo 1.2. Todo espaço métrico é um espaço topológico.
Exemplo 1.3. Se (X, σ) e (Y, µ) são espaços topológicos, então X × Y é um
espaço topológico, com a topologia produto (σ × µ) = {U × V ; U ∈ σ, V ∈ µ} ⊂
℘(X × Y ).
9
CAPÍTULO 1. PRÉ-REQUISITOS
A noção de continuidade em espaços topológicos pode ser expressa através de
abertos (e, consequentemente, de fechados) da topologia.
Definição 1.2. Sejam (X, σ) e (Y, µ) espaços topológicos. Uma função f : X →
Y é contínua se, para todo A ∈ µ, tivermos f −1 (A) ∈ σ. Temos, também, que f
é contínua em x0 ∈ X se, dado qualquer A ∈ µ, com f (x0 ) ∈ A, existe B ∈ σ,
com x0 ∈ B, tal que f (B) ⊂ A.
Em outras palavras, uma função é contínua se a imagem inversa de um aberto
em Y for um aberto em X. Consequentemente, temos que uma função é continua
se a imagem inversa de um fechado em Y for fechado em X.
Definição 1.3. Sejam X e Y dois espaços topológicos. Se f : X → Y é uma
função bijetora, contínua e com inversa f −1 também contínua, então dizemos que
f é um homeomorfismo.
Quando existe um homeomorfismo entre X e Y , dizemos que X e Y são
homeomorfos.
Definição 1.4. Um espaço topológico X é conexo se não existem A ⊂ X e
B ⊂ X, abertos, disjuntos e não vazios, tais que X = A ∪ B. Caso contrário, X
é dito desconexo.
A idéia de conexidade pode ser expressa, também, por meio de caminhos
definidos em um espaço topológico.
Definição 1.5. Um caminho num espaço topológico X é uma aplicação contínua
a : [x0 , x1 ] → X, onde [x0 , x1 ] é um intervalo fechado em R. Se a(x0 ) = x e
a(x1 ) = y, então a é um caminho de x para y e x, y são ditos pontos inicial e
final respectivamente.
Definição 1.6. Um conjunto M ⊂ X é conexo por caminhos se, para cada dois
pontos x, y de M , existe um caminho a : [x0 , x1 ] → M de x para y, ou de y para
x.
Definição 1.7. Seja X um espaço topológico. Um conjunto M ⊂ X diz-se convexo quando, para todo par de pontos x, y ∈ M , o segmento de reta [x, y] está
inteiramente contido em M .
Em Rn , diz-se que um conjunto A é compacto se é fechado e limitado. Em
espaços topológicos, porém, a noção de “limitado” não existe e todo X = X − ∅
é fechado. Apesar disso, também é possível definir a noção de compacidade para
espaços topológicos, conforme faremos a seguir.
10
CAPÍTULO 1. PRÉ-REQUISITOS
Definição 1.8. Seja X um conjunto. Seja {Aλ }λ∈L uma família de subconjuntos
S
de X. Dizemos que tal família é uma cobertura de X se X = λ∈L Aλ .
Particularmente, se L for finito, a cobertura {Aλ }λ∈L é dita ser finita.
Definição 1.9. Seja (X, σ) um espaço topológico. Uma cobertura de X, {Aλ }λ∈L ,
é dita ser uma cobertura aberta de X se cada Aλ ∈ σ, ou seja, Aλ é um aberto.
Definição 1.10. Seja X um conjunto. Seja {Aλ }λ∈L uma cobertura de X. Uma
subcobertura de {Aλ }λ∈L é uma subcoleção {Aλ }λ∈S⊂L ⊂ {Aλ }λ∈L tal que {Aλ }λ∈S
é, ainda, uma cobertura.
Note que, a partir da definição acima, a própria cobertura é uma subcobertura.
Exemplo 1.4.
• Seja X um espaço topológico com a topologia discreta. Então, {{x}}x∈X é
uma cobertura aberta de X.
S
•R= ∞
n=1 (−n, n) é uma cobertura aberta de R. Todavia, tal cobertura não
é finita nem admite subcobertura finita.
A partir das definições acima, podemos definir compacidade para espaços
topológicos.
Definição 1.11. Um espaço topológico (X, σ) é compacto se, dada qualquer coS
bertura aberta X = λ∈L Aλ (ou seja, com cada Aλ ∈ σ), existe uma subcobertura
finita X = Aλ1 ∪ · · · ∪ Aλn .
Exemplo 1.5. Seja (X, σ) um espaço topológico finito qualquer. Então, X é
compacto.
De fato, seja (X, σ) = {x1 , x2 , · · · , xn }. Para mostrar que X é compacto,
devemos exibir uma cobertura aberta que admite subcobertura finita.
S
Temos que {xi } é aberto, 1 ≤ i ≤ n. Então, ni=1 {xi } é uma cobertura aberta
de X e, além disso, finita. Tomando como subcobertura a própria cobertura,
encontramos uma subcobertura finita.
Apresentaremos, a seguir, alguns resultados referentes à compacidade.
Teorema 1.1. A imagem de um conjunto compacto por uma aplicação contínua
é um conjunto compacto.
Definição 1.12. Um espaço topológico X chama-se um espaço de Hausdorff
quando, dados dois pontos arbitrários x 6= y em X, existem abertos A, B ⊂ X
tais que x ∈ A, y ∈ B e A ∩ B = ∅.
11
CAPÍTULO 1. PRÉ-REQUISITOS
Figura 1.1: Espaço de Hausdorff X
Teorema 1.2. Seja X um espaço de Hausdorff. Todo subconjunto compacto
F ⊂ X é fechado em X.
Definição 1.13. Sejam (X, dX ), (Y, dY ) espaços métricos. Uma aplicação f :
(X, dX ) → (Y, dY ) diz-se uniformemente contínua quando, para todo ε > 0 dado
arbitrariamente, existir δ > 0 tal que dX (x, y) < δ implica dY (f (x), f (y)) < ε,
para quaisquer x, y ∈ X.
Teorema 1.3. Seja f : (X, dX ) → (Y, dY ), com X compacto. Se f é contínua,
então f é uniformemente contínua.
Seja E um espaço vetorial (real ou complexo). Nele, é possível definir a noção
de comprimento de vetores x ∈ E, o que chamamos de norma de um vetor.
Definição 1.14. Uma norma em E é uma função k k : E → [0, ∞) que satisfaz:
1. kxk = 0 ⇔ x = 0;
2. kλxk = |λ| · kxk , ∀x ∈ E, ∀λ escalar (real ou complexo);
3. kx + yk ≤ kxk + kyk , ∀x, y ∈ E.
Um espaço vetorial normado é um par (E, k k), onde E é um espaço vetorial e
k k é uma norma em E. Geralmente, espaço vetorial normado é denotado apenas
por E, deixando a norma subentendida.
Exemplo 1.6. Considerando x = (x1 , · · · , xn ) ∈ Rn , temos os seguintes espaços
vetoriais normados:
• (Rn , kxkp ), onde kxkp = (
Pn
1
p p
i=1 |xi | ) , p ≥ 1;
• (Rn , kxk∞ ), onde kxk∞ = max {|xi | : 1 ≤ i ≤ n}.
Para encerrar este capítulo, recordaremos o homomorfismo de grupos.
Definição 1.15. Sejam (G, ∗) e (G0 , •) grupos. Uma aplicação f : G → G0 é um
homomorfismo se, para todo x, y ∈ G, tem-se
f (x ∗ y) = f (x) • f (y).
Dizemos que f é um isomorfismo se f é um homomorfismo bijetor.
12
Capítulo 2
Homotopia
Neste capítulo, trataremos de noções básicas sobre homotopia, as quais serão
utilizadas em todo o trabalho. Além disso, em todos os resultados e definições, o
símbolo I representa o intervalo compacto [0, 1].
2.1
Aplicações Homotópicas
Definição 2.1. Sejam X, Y espaços topológicos. Duas aplicações contínuas f, g :
X → Y dizem-se homotópicas quando existe uma aplicação contínua H : X ×I →
Y tal que H(x, 0) = f (x) e H(x, 1) = g(x), para todo x ∈ X.
A aplicação H é dita uma homotopia entre f e g e, aqui, representada por
f ' g.
Se f ' g e g é uma aplicação constante, dizemos que f é homotopicamente
nula.
Intuitivamente, podemos pensar na homotopia como um processo de deformação contínua da aplicação f na aplicação g. Tal deformação existe durante
uma unidade de tempo; neste caso, o intervalo I. Em outras palavras, dada
H uma homotopia entre f e g e considerando, para cada t ∈ I, a aplicação
contínua Ht : X → Y , definida por Ht (x) = H(x, t), temos que (Ht )t∈I define
uma “família contínua a um parâmetro” - a continuidade, neste caso, significa
que (x, t) 7→ Ht (x) é uma aplicação contínua. Em t = 0 temos f ; para t = 1
temos g; e nos instantes 0 < t < 1, as aplicações Ht fornecem as deformações
intermediárias.
Exemplo 2.1. Seja Y ⊂ E, onde E é um espaço vetorial normado. Dadas
as aplicações contínuas f, g : X → Y , suponhamos que, para todo x ∈ X, o
segmento de reta [f (x), g(x)] esteja contido em Y . Então, definindo H(x, t) =
13
CAPÍTULO 2. HOMOTOPIA
(1 − t)f (x) + tg(x), obtemos uma homotopia H : X × I → Y entre f e g, a qual
chamamos uma homotopia linear. Para cada x ∈ X fixo e t variando de 0 a 1,
o ponto H(x, t) percorre o segmento de reta que liga o ponto f (x) ao ponto g(x).
Como casos particulares, temos:
1o ) Duas aplicações contínuas quaisquer f, g : X → E que tomam valores em
um espaço vetorial normado são homotópicas. Particularmente, toda aplicação
contínua f : X → E é homotópica a aplicação constante 0, pela homotopia
H(x, t) = (1 − t)f (x).
2o ) (Poincaré-Bohl.) Se f, g : X → E−{0} são tais que |f (x) − g(x)| < |f (x)|
para todo x ∈ X, então f ' g.
De fato, se 0 pertencesse ao segmento [f (x), g(x)] para algum x ∈ X, teríamos
|f (x) − g(x)| = |f (x)| + |g(x)| ≥ |f (x)|,
conforme ilustra a figura abaixo:
Figura 2.1: Quando 0 pertence ao segmento [f (x), g(x)].
Logo, [f (x), g(x)] ⊂ E − {0} para todo x ∈ X e, daí, f é linearmente homotópica a g.
Figura 2.2: Quando |f (x) − g(x)| < |f (x)|, o segmento de reta [f (x), g(x)] não
contém a origem 0.
Exemplo 2.2. Seja S n ⊂ Rn+1 a esfera unitária n-dimensional. Dadas duas
aplicações contínuas f, g : X → S n , se f (x) 6= −g(x) para todo x ∈ X (isto é,
f (x) e g(x) nunca são pontos antípodas), então f ' g.
14
CAPÍTULO 2. HOMOTOPIA
De fato, nestas condições, vale (1 − t)f (x) + tg(x) 6= 0 para todo t ∈ I e todo
x ∈ X, pois (1 − t)f (x) + tg(x) = 0 se t =
1
2
e f (x) = −g(x); mas, por hipótese,
f (x) 6= −g(x), ∀x ∈ X.
Então, obtemos uma homotopia H : X × I → S n , entre f e g, definindo
H(x, t) =
(1 − t)f (x) + tg(x)
.
|(1 − t)f (x) + tg(x)|
Figura 2.3: Quando t varia entre 0 e 1, H(x, t) descreve o arco de círculo máximo
que liga f (x) a g(x).
Como casos particulares do exemplo acima, temos:
1. Se f : S n → S n não possui pontos fixos (isto é, f (x) 6= x para todo x),
então f é homotópica à aplicação antípoda α : S n → S n , α(x) = −x.
2. Se f : S n → S n é tal que f (x) = −x para todo x ∈ S n , então f é homotópica
à aplicação identidade de S n .
Exemplo 2.3. Se n é ímpar, então a aplicação antípoda α : S n → S n , α(x) =
−x, é homotópica à identidade id : S n → S n .
De fato, seja n = 2k − 1. Então, S n ⊂ R2k e podemos considerar cada ponto
z = (x1 , y1 , x2 , y2 , · · · , xk , yk ) de S n como uma lista z = (z1 , · · · , zk ) de números
complexos zj = xj + i · yj tais que |z1 |2 + · · · |zk |2 = 1.
Agora, para cada número complexo u ∈ S 1 , de módulo 1, e cada vetor z =
(z1 , · · · , zk ) ∈ S n , definiremos u · z ∈ S n por u · z = (u · z1 , · · · , u · zk ). Assim,
H : S n × I → S n , dada por H(z, t) = etπi · z, é uma homotopia entre a aplicação
antípoda α(z) = −z e a aplicação identidade de S n , lembrando que eit = cos(t) +
i · sen(t).
Proposição 2.1. Sejam X, Y dois espaços topológicos. A relação de homotopia,
f ' g, é uma relação de equivalência no conjunto das aplicações contínuas de X
em Y .
15
CAPÍTULO 2. HOMOTOPIA
Demonstração:
Para provar que se trata de uma relação de equivalência, é
preciso mostrar que a relação de homotopia é reflexiva, simétrica e transitiva.
• Reflexiva: Para toda f : X → Y contínua, a aplicação H : X × I → Y ,
dada por H(x, t) = f (x), é uma homotopia entre f e f . Logo, f ' f .
• Simétrica: Seja H : X × I → Y uma homotopia entre f e g. Definindo
G : X × I → Y por G(x, t) = H(x, 1 − t), obtemos uma homotopia entre g e f .
Logo, f ' g ⇒ g ' f .
• Transitiva: Para provar a transitividade, necessitamos do seguinte resultado:
Lema 2.1. Seja X = A ∪ B, onde A e B são fechados em X. Sejam f : A → Y
e g : B → Y contínuas. Se f (x) = g(x), ∀x ∈ A ∩ B, então a função F : X → Y ,
definida por F (x) = f (x), se x ∈ A, e F (x) = g(x), se x ∈ B, é contínua.
Demonstração:
(Lema 2.1.) Seja C um subconjunto fechado de Y . Temos
que F −1 (C) = f −1 (C) ∪ g −1 (C). Como f é contínua, f −1 (C) é fechado em A e,
assim, fechado em X. Analogamente, g −1 (C) é fechado em B e, portanto, fechado
em X. A união F −1 (C) é, então, fechado em X.
Voltemos à demonstração da transitividade.
Seja F uma homotopia entre f e g e F 0 uma homotopia entre g e h. Então,
definimos H : X × I → Y por
F (x, 2t) se 0 ≤ t ≤ 1
2
H(x, t) =
F 0 (x, 2t − 1) se 1 ≤ t ≤ 1.
2
A aplicação H está bem definida, pois se t = 21 , temos F (x, 2t) = g(x) =
F 0 (x, 2t − 1). Além disso, H é contínua nos dois subconjuntos fechados X × [0, 12 ]
e X × [ 21 , 1] de X × I e, assim, pelo Lema 2.1, é contínua em todo X × I; logo, é
uma homotopia entre f e h. Desse modo, f ' g, g ' h ⇒ f ' h.
Figura 2.4: Transitividade
16
CAPÍTULO 2. HOMOTOPIA
As classes de equivalência segundo a relação de homotopia são chamadas classes de homotopia. Indicaremos a classe de homotopia de uma aplicação contínua
f : X → Y pelo símbolo [f ].
Mostraremos, a seguir, que a composição de aplicações preserva homotopias.
Proposição 2.2. Sejam f, f 0 : X → Y e g, g 0 : Y → Z aplicações contínuas. Se
f ' f 0 e g ' g 0 , então g ◦ f ' g 0 ◦ f 0 .
Demonstração: Por hipótese, f ' f 0 e g ' g 0 . Logo, existem F : X × I → Y
uma homotopia entre f e f 0 , G : Y × I → Z uma homotopia entre g e g 0 . Tomando uma aplicação H : X ×I → Z, dada por H(x, t) = G(F (x, t), t), definimos
uma homotopia entre g ◦ f e g 0 ◦ f 0 .
Em consequência da proposição acima, é possível definir composição entre
classes de homotopia: “dadas f : X → Y e g : Y → Z, definimos [g] ◦ [f ] =
[g ◦ f ]”. A classe [g ◦ f ] não depende dos representantes g, f das classes [g] e [f ]
respectivamente.
Para finalizar este capítulo, apresentaremos alguns tipos de homotopia.
Definição 2.2. Dizemos que uma aplicação contínua f : X → Y é uma equivalência homotópica quando existe g : Y → X contínua tal que g ◦ f ' idX e
f ◦ g ' idY .
Diz-se, então, que g é um inverso homotópico de f e que os espaços topológicos
X e Y têm o mesmo tipo de homotopia.
Diremos que (X, A) é um par de espaços topológicos quando A for um subespaço de X. Assim, dados os pares (X, A) e (Y, B), uma aplicação contínua
f : (X, A) → (Y, B) é uma aplicação contínua f : X → Y tal que f (A) ⊂ B.
Definição 2.3. Dadas as aplicações contínuas f, g : (X, A) → (Y, B), uma homotopia de pares entre f e g é uma aplicação contínua H : (X × I, A × I) → (Y, B)
tal que H(x, 0) = f (x) e H(x, 1) = g(x) para todo x ∈ X. Deve-se, portanto, ter
Ht (A) ⊂ B para todo t ∈ I.
Definição 2.4. Dadas f, g : X → Y contínuas, dizemos que f é homotópica
a g relativamente a um subespaço A ⊂ X, e representamos por f ' g (rel.A),
quando existe uma homotopia H entre f e g tal que H(x, t) = f (x) = g(x) para
todo x ∈ A.
17
CAPÍTULO 2. HOMOTOPIA
2.2
Espaços Contráteis
Dizemos que um espaço topológico X é contrátil quando ele tem o mesmo
tipo de homotopia que um ponto.
Proposição 2.3. X é contrátil se, e somente se, a aplicação identidade id : X →
X é homotópica a uma aplicação constante X → X.
Demonstração: (⇒) Suponha X contrátil. Se f : X → {p} é uma equivalência
homotópica e g : {p} → X é inversa homotópica de f , então g ◦ f ' idX . Como
g ◦ f é uma aplicação constante, mostramos o que queríamos.
(⇐) Se idX ' constante, então idX e a constante são equivalências homotópicas, uma inversa da outra. Logo, X é contrátil.
Corolário 2.1. Um espaço contrátil X é conexo por caminhos.
De fato, se H é uma homotopia entre idX e a aplicação constante X →
{p} , p ∈ X, então, para cada ponto x ∈ X, a correspondência t 7→ H(x, t) define
um caminho ligando x a p.
Proposição 2.4. Se X ou Y é contrátil, então toda aplicação contínua f : X →
Y é homotópica a uma constante.
Demonstração:
Se X for contrátil e H : X × I → X for uma homotopia
entre idX e uma constante, então, dada qualquer f : X → Y , a aplicação f ◦ H :
X × Y → Y será uma homotopia entre f e uma constante.
Se Y for contrátil e F : Y × I → Y for uma homotopia entre idY e uma
constante, então G : X × I → Y , definida por G(x, t) = F (f (x), t), é uma
homotopia entre f : X → Y e uma aplicação constante.
Corolário 2.2. Se X é contrátil e Y é conexo por caminhos, então duas aplicações contínuas quaisquer f, g : X → Y são homotópicas. Se Y é contrátil,
então, qualquer que seja X, duas aplicações contínuas f, g : X → Y são sempre
homotópicas.
Exemplo 2.4. Um subconjunto X de um espaço vetorial normado E chama-se
uma estrela de vértice p quando, para todo x ∈ X, o segmento de reta [p, x] está
contido em X. Se X é uma estrela de vértice p, então H : X × I → X, definida
por H(x, t) = (1 − t)x + tp, é uma homotopia entre idX e a aplicação constante
X → {p}. Logo, toda estrela é contrátil.
Outros exemplos de espaços contráteis são os subconjuntos convexos de um
espaço vetorial normado E, pois um conjunto convexo pode ser considerado como
estrela, com vértice em qualquer um dos seus pontos; logo, é contrátil. Em
particular, um espaço vetorial normado E é convexo e, portanto, contrátil.
18
CAPÍTULO 2. HOMOTOPIA
2.3
Homotopia de Caminhos
Consideraremos, agora, um caso particular do conceito geral de homotopia.
Definição 2.5. Dois caminhos a, b : I → X são ditos caminhos homotópicos se
possuem as mesmas extremidades, isto é, a(0) = b(0) = x0 e a(1) = b(1) = x1 ,
e se existe uma aplicação contínua H : I × I → X tal que, quaisquer que sejam
s, t ∈ I, temos
H(s, 0) = a(s); H(s, 1) = b(s),
H(0, t) = x0 ; H(1, t) = x1 .
A aplicação contínua H é dita uma homotopia de caminhos entre a e b. Se a
e b são caminhos homotópicos, denotamos por a ∼
= b.
Figura 2.5: Homotopia de caminhos
Particularmente, os caminhos fechados a, b : I → X são homotópicos quando
existe uma aplicação contínua H : I × I → X tal que, assumindo a(0) = a(1) =
x0 ∈ X, para quaisquer s, t ∈ I, tem-se
H(s, 0) = a(s); H(s, 1) = b(s); H(0, t) = H(1, t) = x0 .
Figura 2.6: Homotopia de caminhos fechados
19
CAPÍTULO 2. HOMOTOPIA
Exemplo 2.5. Seja X um subconjunto convexo de um espaço vetorial normado.
Se a, b : I → X são caminhos com as mesmas extremidades, então a ∼
= b.
De fato, basta definir H : I × I → X por H(s, t) = (1 − t)a(s) + tb(s) e H
será uma homotopia entre a e b.
Definição 2.6. Dizemos que dois caminhos fechados a, b : I → X são livremente homotópicos quando existe uma aplicação contínua H : I × I → X tal que
H(s, 0) = a(s); H(s, 1) = b(s) e H(0, t) = H(1, t) para quaisquer s, t ∈ I.
As relações de homotopia de caminhos e homotopia livre também satisfazem
as propriedades reflexiva, simétrica e transitiva, sendo, então, relações de equivalência. A demonstração de tal afirmação é similar à que foi desenvolvida na
Proposição 2.1.
Indicaremos por α = [a] a classe de homotopia do caminho a : I → X, ou seja,
o conjunto de todos os caminhos em X que possuem as mesmas extremidades que
a e que são homotópicos a a com extremos fixos durante a homotopia. A classe
de homotopia do caminho constante ex , tal que ex (s) = x para todo s ∈ [0, 1],
será denotada por εx = [ex ].
Definição 2.7. Definimos o caminho inverso de a : I → X como o caminho
a−1 : I → X, dado por a−1 (s) = a(1 − s), 0 ≤ s ≤ 1.
Temos, então, que a−1 começa onde a termina e termina na origem de a. Além
disso, considerando h : I → I a função h(s) = 1 − s, temos que a−1 = a ◦ h.
Definição 2.8. Sejam a e b caminhos em X de x0 para x1 e de x1 para x2
respectivamente. Definimos o produto a ∗ b de a e b como sendo o caminho que
consiste em percorrer primeiro a e depois b.
Figura 2.7: O caminho produto a ∗ b
Tal caminho é dado pela aplicação a ∗ b : I → X, definida por
a(2s) se 0 ≤ s ≤ 1
2
a ∗ b(s) =
b(2s − 1) se 1 ≤ s ≤ 1.
2
Como a(1) = b(0) = x1 , a aplicação a ∗ b está bem definida. Além disso, pelo
Lema 2.1, a ∗ b é contínua. Segue, então, que a ∗ b é um caminho de x0 para x2 ,
isto é, que começa em a(0) e termina em b(1).
20
CAPÍTULO 2. HOMOTOPIA
A operação produto de caminhos induz uma operação nas classes de homotopia de caminhos, definida por
α ∗ β = ρ, onde α = [a], β = [b] e ρ = [a ∗ b].
Para verificarmos tal fato, seja F uma homotopia de caminhos entre a e a0 e
G uma homotopia de caminhos entre b e b0 . Defina H : I × I → X por
F (2s, t) se 0 ≤ s ≤ 1 , t ∈ I
2
H(s, t) =
G(2s − 1, t) se 1 ≤ s ≤ 1, t ∈ I.
2
Como F (1, t) = x1 = G(0, t) para todo t ∈ I, temos que H está bem definida. Pelo Lema 2.1, concluímos que H é contínua. Assim, H é a homotopia de
caminhos desejada entre a ∗ b e a0 ∗ b0 .
Figura 2.8: Operação produto nas classes de homotopia de caminhos
Todavia, a operação α∗β não está definida para todo par de classes. Define-se,
apenas, para os pares α, β tais que a(1) = b(0).
Para finalizar, mostraremos que a operação ∗ nas classes de homotopia de
caminhos satisfaz algumas propriedades que se assemelham aos axiomas de um
grupo.
Teorema 2.5. Sejam α = [a], β = [b] e γ = [c]. A operação ∗ possui as seguintes
propriedades:
1. (Associatividade) Se α ∗ (β ∗ γ) está definido, então (α ∗ β) ∗ γ também está
definido e, além disso, são iguais.
2. (Identidade à direita e à esquerda) Dados x ∈ X e o caminho constante
ex : I → X tal que ex (s) = x, ∀s ∈ I, se a é um caminho em X de x0 para
x1 , então
α ∗ εx1 = α e εx0 ∗ α = α.
21
CAPÍTULO 2. HOMOTOPIA
3. (Inverso) Se a é um caminho em X de x0 para x1 e a−1 é o caminho inverso
de a, então
α ∗ α−1 = εx0 e α−1 ∗ α = εx1 .
Demonstração:
Para provarmos as três propriedades acima, necessitaremos
de dois fatos:
1o ) Se f : X → Y é uma aplicação contínua e se F é uma homotopia de
caminhos em X entre os caminhos a e b, então f ◦F é uma homotopia de caminhos
em Y entre os caminhos f ◦ a e f ◦ b.
Figura 2.9: Homotopia de caminhos
2o ) Se f : X → Y é uma aplicação contínua e se a e b são caminhos em X
com a(1) = b(0), então f ◦ (a ∗ b) = (f ◦ a) ∗ (f ◦ b).
Para verificar a segunda propriedade, sejam e0 o caminho constante em I no
ponto 0 e i : I → I a aplicação identidade, a qual é um caminho em I de 0 para
1. Então, e0 ∗ i é também um caminho em I de 0 para 1.
Como I é convexo, existe uma homotopia de caminhos G em I entre i e e0 ∗ i.
Assim, a ◦ G é uma homotopia de caminhos em X entre os caminhos a ◦ i = a e
a ◦ (e0 ∗ i) = (a ◦ e0 ) ∗ (a ◦ i) = ex0 ∗ a.
Analogamente, assumindo que se e1 denota o caminho constante em 1, então
i ∗ e1 é um caminho homotópico ao caminho i em I, mostramos que α ∗ εx1 = α.
Para provar a propriedade do inverso, note que a inversa de i é i−1 (s) = 1 − s
e, sendo assim, i ∗ i−1 é um caminho em I que começa e termina em 0. Logo, é o
caminho constante e0 .
Como I é convexo, existe uma homotopia de caminhos H em I entre e0 e i∗i−1 .
Então, a ◦ H é uma homotopia de caminhos entre a ◦ e0 = ex0 e (a ◦ i) ∗ (a ◦ i−1 ) =
a ∗ a−1 .
De modo análogo, usando o fato de que i−1 ∗ i é um caminho homotópico a
e1 em I, mostramos que α−1 ∗ α = εx1 .
Para mostrarmos a associatividade, é conveniente definirmos o produto a ∗ b
de uma maneira diferente.
22
CAPÍTULO 2. HOMOTOPIA
Se [x0 , x1 ] e [x2 , x3 ] são dois intervalos em R, existe uma única aplicação
f : [x0 , x1 ] → [x2 , x3 ] da forma f (x) = mx + k que leva x0 em x2 e x1 em x3 , a
qual chamaremos uma aplicação linear positiva de [x0 , x1 ] para [x2 , x3 ], pois seu
gráfico é uma linha reta com inclinação positiva.
Com tal terminologia, o produto a ∗ b pode ser descrito da seguinte maneira:
em [0, 12 ], é igual a aplicação linear positiva de [0, 21 ] para [0, 1], seguida por a; e
em [ 12 , 1], é igual a aplicação linear positiva de [ 21 , 1] para [0, 1] seguida por b.
Vamos, agora, provar a propriedade associativa.
Dados os caminhos a, b e c em X, os produtos a∗(b∗c) e (a∗b)∗c são definidos,
precisamente, quando a(1) = b(0) e b(1) = c(0). Assumindo estas duas condições,
definimos o “produto triplo” dos caminhos a, b e c, como segue: escolha pontos x0
e x1 em I tais que 0 < x0 < x1 < 1. Defina um caminho kx0 ,x1 em X de modo
que: em [0, x0 ] é igual a aplicação linear positiva de [0, x0 ] para I seguida de a;
em [x0 , x1 ] é igual a aplicação linear positiva de [x0 , x1 ] para I seguida de b; e em
[x1 , 1] é igual a aplicação linear positiva de [x1 , 1] para I seguida de c. Assim, o
caminho kx0 ,x1 depende da escolha dos pontos x0 e x1 , ao contrário de sua classe
de homotopia de caminhos. Mostraremos, a seguir, que se x2 e x3 formam outro
par de pontos em I com 0 < x2 < x3 < 1, então kx2 ,x3 é um caminho homotópico
a kx0 ,x1 .
Seja f : I → I uma aplicação cujo gráfico é representado na figura 2.10. Tal
aplicação, quando restrita a [0, x0 ], [x0 , x1 ] e [x1 , 1], é igual a aplicações lineares
positivas destes intervalos para [0, x2 ], [x2 , x3 ] e [x3 , 1] respectivamente. Segue que
kx2 ,x3 ◦ f = kx0 ,x1 . Todavia, f é um caminho em I de 0 para 1, assim como a
aplicação identidade i : I → I. Assim, existe uma homotopia de caminhos F em
I entre f e i. Logo, kx2 ,x3 ◦ F é uma homotopia de caminhos em X entre kx0 ,x1 e
kx2 ,x3 , pois kx2 ,x3 ◦ F (s, 0) = kx2 ,x3 ◦ f (s) = kx0 ,x1 e kx2 ,x3 ◦ F (s, 1) = kx2 ,x3 ◦ i(s) =
kx2 ,x3 .
Figura 2.10: Gráfico de f : I → I
Através do “produto triplo”, somos capazes de provar a propriedade associa23
CAPÍTULO 2. HOMOTOPIA
tiva, pois o produto a ∗ (b ∗ c) é exatamente o produto tripo kx0 ,x1 no caso onde
x0 =
x2 =
1
e x1 = 34 , enquanto o produto (a ∗ b) ∗ c é igual a kx2 ,x3 ,
2
1
e x3 = 12 , conforme ilustrado na figura 2.11. Portanto, estes
4
no caso onde
dois produtos
são caminhos homotópicos.
Figura 2.11: Associatividade
De modo mais geral, temos o seguinte teorema:
Teorema 2.6. Sejam a um caminho em X e x0 , · · · , xn pontos tais que 0 = x0 <
x1 < · · · < xn = 1. Seja ai : I → X um caminho igual a aplicação linear positiva
de I para [xi−1 , xi ] seguida por a. Então,
α = [a1 ] ∗ · · · ∗ [an ].
A demonstração do teorema acima pode ser feita por recorrência, considerando
as subdivisões 0 = x0 < x1 < · · · < xn = 1 duas a duas.
Observação 2.1. Em uma homotopia a ∼
= b ∗ c, é permitido ao término de b
(origem de c) mover-se durante o processo. Os extremos de b ∗ c (iguais aos de
a) é que devem permanecer fixos.
24
Capítulo 3
O Grupo Fundamental
O conjunto das classes de homotopia de caminhos, considerando caminhos
em um espaço topológico X, não forma um grupo segundo a operação ∗, pois
o produto de duas classes de homotopia de caminhos não está definido sempre.
Entretanto, se tomarmos um ponto x0 em X, fixá-lo como um “ponto base” e
restringir-nos aos caminhos que começam e terminam em x0 , o conjunto das
classes de homotopia de caminhos para tais caminhos formará um grupo com a
operação ∗. Tal grupo é dito o Grupo Fundamental de X.
Neste capítulo, estudaremos o grupo fundamental e algumas de suas propriedades.
Definição 3.1. Sejam X um espaço topológico e x0 um ponto de X. O conjunto
das classes de homotopia de caminhos para caminhos fechados com base em x0 ,
com a operação ∗, é chamado o grupo fundamental de X relativo ao ponto base
x0 e denotado por π1 (X, x0 ).
Dados dois caminhos fechados a e b com base em x0 , o produto a∗b está sempre
definido e é um caminho fechado baseado em x0 . Segue do Teorema 2.5 que a
operação ∗, quando restrita ao conjunto das classes de homotopia de caminhos,
satisfaz os axiomas de grupo.
Mostraremos, a seguir, que a escolha do ponto base não afeta a estrutura do
grupo fundamental.
Proposição 3.1. Se x0 e x1 pertencem à mesma componente conexa por caminhos de X, então π1 (X, x0 ) e π1 (X, x1 ) são isomorfos. Mais precisamente, cada
classe de homotopia γ de caminhos que ligam x0 a x1 induz um isomorfismo
γ : π1 (X, x1 ) → π1 (X, x0 ), dado por γ(α) = γ ∗ α ∗ γ −1 .
Demonstração:
Seja γ uma classe de homotopia de caminhos que ligam x0 a
x1 . Se α ∈ π1 (X, x1 ), então γ ∗ α ∗ γ −1 ∈ π1 (X, x0 ).
25
CAPÍTULO 3. O GRUPO FUNDAMENTAL
Mostremos que, para α, β ∈ π1 (X, x1 ), γ é um homomorfismo.
γ(α) ∗ γ(β) = (γ ∗ α ∗ γ −1 ) ∗ (γ ∗ β ∗ γ −1 )
= γ ∗ (α ∗ β) ∗ γ −1
= γ(α ∗ β).
Para mostrar que γ é um isomorfismo, devemos provar que (γ)−1 é o inverso
de γ.
De fato, para cada δ ∈ π1 (X, x0 ), temos
(γ)−1 (δ) = γ −1 ∗ δ ∗ (γ −1 )−1 = γ −1 ∗ δ ∗ γ,
γ((γ)−1 (δ)) = γ ∗ (γ −1 ∗ δ ∗ γ) ∗ γ −1 = δ.
Analogamente, mostra-se que (γ)−1 (γ(α)) = α, para cada α ∈ π1 (X, x1 ) .
Figura 3.1: Isomorfismo γ
Corolário 3.1. Se X é conexo por caminhos, então, para quaisquer pontos base
x0 , x1 ∈ X, os grupos fundamentais π1 (X, x0 ) e π1 (X, x1 ) são isomorfos.
O isomorfismo entre π1 (X, x0 ) e π1 (X, x1 ), mencionado no corolário acima,
depende dos caminhos escolhidos (variando a classe γ, o isomorfismo γ varia
também.) Todavia, quando π1 (X, x0 ) é abeliano, o isomorfismo independe do
caminho; isto é, duas classes quaisquer γ, δ, ligando x0 a x1 , definem o mesmo
isomorfismo: γ = δ. De fato, neste caso, para todo α ∈ π1 (X, x1 ), vale:
γ(α) = γ ∗ α ∗ γ −1 = γ ∗ δ −1 · δ ∗ α ∗ δ −1 · δ ∗ γ −1 =
= γ ∗ δ −1 · δ ∗ γ −1 · δ ∗ α ∗ δ −1 = δ ∗ α ∗ δ −1 = δ(α),
pois δ ∗ α ∗ δ −1 e δ ∗ γ −1 , pertencendo ambas ao grupo abeliano π1 (X, x0 ),
comutam.
Segue destas considerações e do Corolário 3.1 que, sendo X um espaço topológico conexo por caminhos com π1 (X, x0 ) abeliano para algum x0 ∈ X, o
grupo π1 (X, x1 ) também será abeliano, seja qual for o ponto base x1 ∈ X.
26
CAPÍTULO 3. O GRUPO FUNDAMENTAL
Além disso, dados, arbitrariamente, x0 , x1 ∈ X, existe um isomorfismo natural π1 (X, x1 ) → π1 (X, x0 ); isto é, a cada α ∈ π1 (X, x1 ) corresponde uma única
classe α ∈ π1 (X, x0 ), definida sem ambiguidade nem escolhas arbitrárias. Neste
caso, mostraremos que podemos considerar o grupo fundamental de X como o
conjunto das classes de homotopias livres de caminhos fechados em X e, portanto,
representá-lo por π1 (X), sem apresentar explicitamente o ponto base.
De fato, seja π(X) o conjunto das classes de homotopias livres de caminhos
fechados em X. Fixemos um ponto base x0 ∈ X e consideremos a aplicação
ϕ : π1 (X, x0 ) → π1 (X) tal que ϕ(α) = classe de homotopia livre que contém α.
Para qualquer espaço conexo por caminhos X, a aplicação ϕ é sempre sobrejetora,
pois todo caminho fechado a em X, com base em x1 , é livremente homotópico a
um caminho fechado b com base x0 - basta tomar um caminho c ligando x0 a x1
e definir b = (c ∗ a) ∗ c−1 . Quando π1 (X, x0 ) é abeliano, ϕ é também injetora,
pois se α = [a] e β = [b] em π1 (X, x0 ) são tais que ϕ(α) = ϕ(β), então a e b
são livremente homotópicos. Logo, α e β são elementos conjugados no grupo
comutativo π1 (X, x0 ) e, portanto, α = β. Sendo assim, ϕ é uma bijeção de
π1 (X, x0 ) sobre π1 (X).
3.1
O homomorfismo induzido
Seja f : X → Y uma aplicação contínua que leva o ponto x0 de X no ponto y0
de Y . Se a é um caminho fechado em X com base em x0 , então f ◦a : I → Y é um
caminho fechado em Y com base em y0 . A correspondência a 7→ f ◦ a dá origem
a uma nova aplicação que leva π1 (X, x0 ) a π1 (Y, y0 ), chamada homomorfismo
induzido por uma aplicação contínua.
Definição 3.2. Seja f : X → Y uma aplicação contínua. Definimos o homomorfismo induzido por f como a aplicação f] : π1 (X, x0 ) → π1 (Y, y0 ), com y0 = f (x0 ),
dada por f] (α) = [f ◦ a], onde α = [a].
A aplicação f] está bem definida, pois se F é uma homotopia de caminhos
entre os caminhos a e b, então f ◦ F é uma homotopia de caminhos entre os
caminhos f ◦ a e f ◦ b. Como f ◦ (a ∗ b) = (f ◦ a) ∗ (f ◦ b), segue que f] é realmente
um homomorfismo.
Teorema 3.2. Se f : X → Y e g : Y → Z são duas aplicações contínuas, e f] :
π1 (X, x0 ) → π1 (Y, y0 ) e g] : π1 (Y, y0 ) → π1 (Z, z0 ), com y0 = f (x0 ) e z0 = g(y0 ),
são os homomorfismos induzidos por tais aplicações, então (g ◦f )] = g] ◦f] . Além
27
CAPÍTULO 3. O GRUPO FUNDAMENTAL
disso, se id : X → X é a aplicação identidade, então id] : π1 (X, x0 ) → π1 (X, x0 )
é o homomorfismo identidade.
Demonstração: Seja α = [a]. Por definição,
(g ◦ f )] (α) = [(g ◦ f ) ◦ a],
(g] ◦ f] )(α) = g] (f] (α)) = g] ([f ◦ a]) = [g ◦ (f ◦ a)].
Analogamente, id] (α) = [id ◦ a] = [a] = α.
Segue da definição e do teorema apresentados acima que espaços homeomorfos
possuem grupos fundamentais isomorfos. Mais precisamente, se h : X → Y for
um homeomorfismo, então h] : π1 (X, x0 ) → π1 (Y, y0 ), com y0 = h(x0 ), é um
isomorfismo.
−1
De fato, seja h−1 : Y → X a inversa de h. Então, h−1
◦ h)] = id] ,
] ◦ h] = (h
−1
0
0
onde id é a identidade de X; e h] ◦ h−1
] = (h ◦ h )] = id] , onde id é a identidade
de Y . Como id] e id0] são os homomorfismos identidade dos grupos π1 (X, x0 ) e
π1 (Y, y0 ), respectivamente, então h−1
] é o inverso de h] .
Proposição 3.3. Sejam a, b : I → X caminhos fechados com bases nos pontos
x0 , y0 respectivamente. A fim de que a e b sejam livremente homotópicos, é necessário e suficiente que exista um caminho c : I → X, ligando x0 a y0 , tal que
a∼
= (c ∗ b) ∗ c−1 .
Figura 3.2: Caminhos livremente homotópicos
Demonstração:
(Necessário) Seja H : I × I → X uma homotopia livre entre
os caminhos fechados a e b. Definamos c : I → X por c(t) = H(0, t) = H(1, t).
Consideremos uma aplicação contínua ϕ : I × I → I × I que transforma o bordo
do quadrado I × I em si mesmo da seguinte maneira: ϕ(0, t) = (0, 0); ϕ(1, t) =
(1, 0); ϕ(s, 0) = (s, 0), para quaisquer s, t ∈ I, e
28
CAPÍTULO 3. O GRUPO FUNDAMENTAL
(0, 2s) se 0 ≤ s ≤ 21 ,
ϕ(s, 1) = (4s − 2, 1) se 12 ≤ s ≤ 43 ,
(1, 4 − 4s) se 3 ≤ s ≤ 1.
4
A aplicação ϕ, definida acima, existe. De fato, toda aplicação contínua ϕ̇ :
∂(I × I) → I × I do bordo do quadrado em I × I estende-se, continuamente, a
uma aplicação ϕ de I × I em I × I, pois o quadrado I × I é contrátil; logo, ϕ̇ é
homotópica a uma constante.
Tomando F = H ◦ ϕ, temos que F é uma homotopia de caminhos entre a e
(c ∗ b) ∗ c−1 .
(Suficiente) Suponha a ∼
= (c ∗ b) ∗ c−1 . Para mostrarmos que a é livremente
homotópico a b, basta mostrarmos que b e (c∗b)∗c−1 são livremente homotópicos.
Seja H : I × I → X uma homotopia livre definida por H = ((c ∗ b) ∗ c−1 ) ◦ ϕ,
onde ϕ : I × I → I é uma retração do quadrado sobre sua base horizontal,
conforme ilustra a figura abaixo: ϕ é a identidade na base; transforma linearmente
cada segmento horizontal, indicado na figura, no segmento [ 14 , 21 ] da base; cada
segmento de origem 0 no segmento [0, 41 ] e cada segmento de origem 1 no segmento
1
, 1.
2
Temos, assim, que H é uma homotopia livre entre (c ∗ b) ∗ c−1 e b.
Figura 3.3: Retração de um quadrado sobre sua base horizontal
Corolário 3.2. Sejam f, g : X → Y aplicações contínuas homotópicas. Os
homomorfismos f] : π1 (X, x0 ) → π1 (Y, y0 ) e g] : π1 (X, x0 ) → π1 (Y, y1 ), com y0 =
f (x0 ) e y1 = g(x0 ), são relacionados por f] = γ ◦g] , onde γ : π1 (Y, y1 ) → π1 (Y, y0 )
é um isomorfismo definido na forma da Proposição 3.1.
Basta observar que se H : X × I → Y é uma homotopia entre f e g, então
c : I → Y , definido por c(t) = H(x0 , t), é um caminho ligando y0 = f (x0 ) a
y1 = g(x0 ). Como, para todo caminho fechado a : I → X com base em x0 , a
aplicação (s, t) 7→ H(a(s), t) é uma homotopia livre entre f ◦ a e g ◦ a, temos,
29
CAPÍTULO 3. O GRUPO FUNDAMENTAL
pela Proposição 3.3, f ◦ a ∼
= c ∗ (g ◦ a) ∗ c−1 . Fazendo γ = [c] e α = [a], temos
f] (α) = [f ◦ a] = [c ∗ (g ◦ a) ∗ c−1 ] = γ ∗ (g] (α)) ∗ γ −1 = γ(g] (α)).
A partir do Corolário 3.2, temos que o diagrama abaixo é comutativo:
Figura 3.4: Diagrama comutativo
Proposição 3.4. Se dois espaços topológicos X e Y , conexos por caminhos, têm
o mesmo tipo de homotopia, então seus grupos fundamentais são isomorfos.
Demonstração: Sejam f : X → Y e g : Y → X contínuas tais que g ◦ f ' idX
e f ◦ g ' idY . Tomemos um ponto base x0 ∈ X e façamos y0 = f (x0 ), x1 = g(y0 )
e y1 = f (x1 ).
Sejam f]0 : π1 (X, x0 ) → π1 (Y, y0 ), f]1 : π1 (X, x1 ) → π1 (Y, y1 ) e g] : π1 (Y, y0 ) →
π1 (X, x1 ) homomorfismos induzidos por f e g respectivamente.
Da homotopia g ◦ f ' idX , concluímos, pelo Corolário 3.2 da Proposição 3.3,
que g] ◦ f]0 = γ : π1 (X, x0 ) → π1 (X, x1 ), onde γ é o isomorfismo definido na
Proposição 3.1, a partir da classe de homotopia γ de um caminho em X, ligando
x1 a x0 . Analogamente, de f ◦ g ' idY , concluímos que f]1 ◦ g] = δ : π1 (Y, y0 ) →
π1 (Y, y1 ), onde δ é o isomorfismo de conjugação pela classe de homotopia δ de
um caminho em Y , ligando y1 a y0 .
Com estas relações, obtemos a comutatividade do diagrama abaixo:
Figura 3.5: Diagrama
30
CAPÍTULO 3. O GRUPO FUNDAMENTAL
Dos isomorfismos g] ◦ f]0 = γ e f]1 ◦ g] = δ, concluímos que g] é sobrejetivo e
injetivo respectivamente. Logo, g] é um isomorfismo e, portanto, f]0 e f]1 também
são isomorfismos. Em particular, π1 (X, x0 ) e π1 (Y, y0 ) são isomorfos.
Corolário 3.3. O grupo fundamental de um espaço contrátil possui um único
elemento.
Observação 3.1. Um enunciado mais preciso para a Proposição 3.4 seria: se
f : X → Y é uma equivalência homotópica, então o homomorfismo induzido
f] : π1 (X, x0 ) → π1 (Y, y0 ), com y0 = f (x0 ), é um isomorfismo.
3.2
Espaços simplesmente conexos
Um espaço topológico X é dito simplesmente conexo quando é conexo por
caminhos e, para todo x0 ∈ X, tem-se π1 (X, x0 ) = {0}, isto é, π1 (X, x0 ) é o
grupo trivial (formado por um elemento).
Em outras palavras, para todo caminho fechado a : I → X, com base em x0 ,
temos que a ∼
= ex . Ou ainda, equivalentemente, X é conexo por caminhos e todo
0
caminho fechado a : I → X é livremente homotópico a um caminho constante.
Exemplo 3.1. Todo espaço contrátil é simplesmente conexo.
Proposição 3.5. Em um espaço simplesmente conexo, dois caminhos quaisquer
com as mesmas extremidades fixas são homotópicos.
Demonstração: Sejam a, b : I → X dois caminhos de x0 para x1 . Então, a∗b−1
está definido e é um caminho fechado com base em x0 . Como, por hipótese, X é
simplesmente conexo, a ∗ b−1 é homotópico ao caminho fechado constante em x0 ,
isto é, a ∗ b−1 ∼
= ex0 . Então, a ∼
= (a ∗ b−1 ) ∗ b ∼
= ex0 ∗ b ∼
= b. Logo, a ∼
= b.
Nosso objetivo, agora, é mostrar que, quando n > 1, a esfera unitária S n é
simplesmente conexa. Para compor tal demonstração, necessitamos de algumas
ferramentas, as quais serão apresentadas a seguir.
Sejam a : I → X um caminho e ϕ : I → I uma parametrização de I, isto é,
uma função contínua tal que ϕ(∂I) ⊂ ∂I. Tal parametrização ϕ é dita positiva
quando ϕ(0) = 0 e ϕ(1) = 1; negativa quando ϕ(0) = 1 e ϕ(1) = 0; e trivial
quando ϕ(0) = ϕ(1).
O caminho b = a ◦ ϕ : I → X chama-se uma reparametrização do caminho a.
31
CAPÍTULO 3. O GRUPO FUNDAMENTAL
Proposição 3.6. Seja b = a ◦ ϕ uma reparametrização do caminho a : I → X.
Se a parametrização ϕ for positiva, então b ∼
= a; se for negativa, tem-se b ∼
= a−1 ;
se for trivial, então b ∼
= constante.
Demonstração: Pelo exemplo 2.5, dois caminhos em I são homotópicos (com
extremidades fixas) se, e somente se, têm a mesma origem e o mesmo fim. Sejam
i, j : I → I dadas por i(s) = s e j(s) = 1 − s. Temos, então, ϕ ∼
= i, ϕ ∼
= j
ou ϕ ∼
= constante, conforme ϕ seja uma reparametrização positiva, negativa ou
trivial. Segue que a ◦ ϕ ∼
= a ◦ i = a, a ◦ ϕ ∼
= a ◦ j = a−1 ou a ◦ ϕ ∼
= constante
respectivamente.
Corolário 3.4. Dados um caminho a : I → X e pontos 0 = s0 < s1 < · · · <
sk = 1, seja, para cada i = 1, · · · , k, ai : I → X o caminho “parcial”, definido por
ai = (a|[si−1 , si ])◦ϕi , onde ϕi : I → [si−1 , si ] é o homeomorfismo linear crescente.
Então, fazendo b = a1 a2 · · · ak , temos b ∼
= a.
Lema 3.1. Seja a : I → S n um caminho tal que a(I) 6= S n . Então, a ∼
= ex0 ,
se a(0) = a(1) = x0 , e a ∼
= c, onde c : I → S n é um caminho injetivo, se
a(0) 6= a(1).
Demonstração: Como a(I) 6= S n , existe p ∈ S n −a(I). Seja ϕ : S n −{p} → Rn
a projeção estereográfica. Então, como Rn é simplesmente conexo, ϕ ◦ a : I → Rn
é homotópico (com extremos fixos) a uma constante ou a um segmento de reta
(parametrizado injetivamente), conforme a seja fechado ou não. O mesmo ocorre
com a = ϕ−1 ◦ (ϕ ◦ a).
Lema 3.2. Seja n > 1. Se o caminho a : I → S n é injetivo, sua imagem é um
subconjunto fechado com interior vazio em S n .
Demonstração: Como I é compacto, a(I) é compacto e, portanto, fechado em
S n . Além disso, sendo injetivo, a é um homeomorfismo de I sobre sua imagem
a(I), a qual, se tivesse interior não vazio, conteria uma bola aberta B, de centro
x = a(s). Então, devemos ter B = a(J), onde J é um intervalo aberto contendo
s. Sendo assim, o caminho a seria um homeomorfismo de J sobre B, o que é um
absurdo, pois J − {s} é desconexo, enquanto B − {x} é conexo, em virtude de
n > 1.
Lema 3.3. Todo caminho a : I → S n é homotópico (com extremos fixos) a um
caminho b : I → S n tal que b(I) 6= S n .
Demonstração:
Devido a continuidade uniforme de a, podemos obter pontos
0 = s0 < s1 < · · · < sk = 1 de tal forma que, tomando Ii = [si−1 , si ], tenhamos
32
CAPÍTULO 3. O GRUPO FUNDAMENTAL
a(Ii ) 6= S n para todo i = 1, · · · , k. Pelo Corolário 3.4, temos a ∼
= a1 a2 · · · ak ,
onde cada ai : I → S n é uma reparametrização de a|Ii , com ai (I) = a(Ii ). Pelos
lemas anteriores, temos ai ∼
= bi , onde a imagem bi (I) é um fechado com interior
vazio em S n . Fazendo b = b1 b2 · · · bk , temos que
a∼
= a1 a2 · · · ak ∼
= b1 b2 · · · bk = b
e a imagem b(I) = b1 (I) ∪ · · · ∪ bk (I) é uma reunião finita de fechados com
interior vazio em S n . Segue, então, que b(I) tem interior vazio. Em particular,
b(I) 6= S n .
Neste momento, somos capazes de provar o seguinte resultado:
Proposição 3.7. Se n > 1, a esfera S n é simplesmente conexa.
Demonstração:
Pelo Lema 3.3, todo caminho fechado em S n é homotópico
a um caminho fechado cuja imagem não é toda S n . Este último caminho, pelo
Lema 3.1, é homotópico a uma constante. Logo, S n é simplesmente conexa.
Para encerrar esta seção, destacamos duas propriedades do grupo fundamental:
Proposição 3.8. O grupo fundamental de um produto cartesiano X × Y é isomorfo ao produto cartesiano dos grupos fundamentais de X e Y . Mais precisamente, se p : X × Y → X e q : X × Y → Y são as projeções naturais, então
ϕ : π1 (X × Y, (x0 , y0 )) → π1 (X, x0 ) × π1 (Y, y0 ), dado por ϕ(α) = (p] (α), q] (α)) é
um isomorfismo.
Demonstração:
Um caminho fechado c : I → X × Y , com base no ponto
(x0 , y0 ), tem a forma c(s) = (a(s), b(s)), onde a = p ◦ c é um caminho fechado
em X, com base em x0 , e b = q ◦ c é fechado com base em y0 ∈ Y . Dado,
também, c0 : I → X × Y , com c0 (s) = (a0 (s), b0 (s)), temos c ∼
= c0 se, e somente se,
a∼
= a0 e b ∼
= b0 . De fato, uma homotopia de caminhos H entre c e c0 tem a forma
H(s, t) = (F (s, t), G(s, t)), onde F e G são homotopias de caminhos entre a e a0 ,
b e b0 respectivamente. Daí resulta a proposição.
Corolário 3.5. Se X e Y são simplesmente conexos, então o produto cartesiano
X × Y é simplesmente conexo.
33
Capítulo 4
Exemplos e Aplicações
Como fechamento dos tópicos estudados, apresentaremos, neste último capítulo, alguns exemplos e aplicações do grupo fundamental em casos particulares.
4.1
O grupo fundamental do círculo
O principal objetivo desta seção é mostrar que o grupo fundamental do círculo
S 1 é infinito cíclico e, portanto, existe um isomorfismo entre os grupos π1 (S 1 ) e
Z. Faremos isto associando a cada caminho fechado a no círculo um número
n(a), chamado o grau de a, tal que dois caminhos são homotópicos se, e somente
se, possuem o mesmo grau. Além disso, todo número inteiro n é grau de algum
caminho fechado em S 1 .
Para determinarmos π1 (S 1 ), utilizaremos a aplicação exponencial ξ : R → S 1 ,
definida por
ξ(t) = eit = (cos(t), sen(t)).
Tal ξ é contínua e sobrejetora, além de ser um homomorfismo do grupo aditivo
R para o grupo multiplicativo S 1 (números complexos módulo 1), pois ei(s+t) =
(cos(s + t), sen(s + t)) = eis · eit . O núcleo de ξ é o grupo 2πZ = {2πn; n ∈ Z},
formado pelos múltiplos inteiros de 2π e, além disso, dado u ∈ S 1 , temos ξ −1 (u) =
{t + 2πn; n ∈ Z}, onde t ∈ R é um número real qualquer tal que ξ(t) = u.
Lema 4.1. ξ : R → S 1 é uma aplicação aberta.
Demonstração:
Dado um conjunto aberto U ⊂ R, devemos provar que sua
imagem ξ(U ) é um subconjunto aberto de S 1 . Ou, equivalentemente, tomando
F = S 1 − ξ(U ), devemos provar que F é fechado em S 1 . Mas, ξ −1 (ξ(U )) =
S
−1
n∈Z (U + 2πn) é aberto em R; logo, seu complementar ξ (F ) é fechado em R.
34
CAPÍTULO 4. EXEMPLOS E APLICAÇÕES
Note que, para cada x ∈ R, existe x0 ∈ [0, 2π] tal que ξ(x0 ) = ξ(x). Portanto,
F = ξ(ξ −1 (F )) = ξ(ξ −1 (F ) ∩ [0, 2π]). Todavia, o conjunto ξ −1 (F ) ∩ [0, 2π] é
compacto; logo, sua imagem por ξ também é compacta, ou seja F é compacto e,
daí, F é um subconjunto fechado em S 1 .
Proposição 4.1. A restrição de ξ a todo intervalo aberto (t, t + 2π) de comprimento 2π é um homeomorfismo sobre S 1 − {ξ(t)}.
Demonstração:
A restrição ξ|(t, t + 2π) é uma bijeção contínua sobre S 1 −
{ξ(t)}. Pelo lema anterior, ξ transforma abertos do intervalo (t, t+2π) em abertos
de S 1 ; logo, a inversa de ξ|(t, t + 2π) também é contínua.
Corolário 4.1. Todo ponto u = ξ(t) ∈ S 1 possui uma vizinhança aberta V =
S 1 − {u∗ } , u∗ = −u, cuja imagem inversa ξ −1 (V ) é a reunião dos intervalos
abertos In = (t + π(2n − 1), t + π(2n + 1)), n ∈ Z, cada um dos quais é aplicado
homeomorficamente por ξ sobre V .
Seja a : J → R2 , com J = [s0 , s1 ], um caminho tal que |a(s)| = 1 para todo
s ∈ J. Então, a(s) ∈ S 1 para todo s; logo, podemos escrever a : J → S 1 .
Uma função-ângulo para o caminho a é uma função ã : J → R tal que a(s) =
(cos(ã(s)), sen(ã(s))) para todo s ∈ J. Como ξ(s) = (cos(s), sen(s)) = eis , temos
que ã é uma função-ângulo para o caminho a se, e somente se, a = ξ ◦ ã.
Proposição 4.2. Dados um intervalo J = [s0 , s1 ], uma função contínua a : J →
S 1 e um número real t0 com a(s0 ) = eit0 , existe uma única função contínua
ã : J → R tal que a(s) = eiã(s) para todo s ∈ J (isto é, a = ξ ◦ ã) e ã(s0 ) = t0 .
Demonstração:
Inicialmente, temos que o resultado é válido no caso em que
1
a(J) ⊂ S − {y}, para algum y ∈ S 1 , e assim, como a(s0 ) 6= y, existe um único
x ∈ ξ −1 (y) tal que t0 ∈ (x, x+2π). Então, ξx = ξ|(x, x+2π) é um homeomorfismo
sobre S 1 − {y} e, fazendo ã = ξx−1 ◦ a, obtemos a função desejada.
Suponhamos, agora, que J = J1 ∪ J2 seja reunião de dois intervalos compactos
com um extremo s∗ em comum, e que a proposição seja válida para as restrições
a1 = a|J1 e a2 = a|J2 . Escolhemos a˜1 : J1 → R de modo que a˜1 (s0 ) = t0
e ξ ◦ a˜1 = a1 . Em seguida, escolhemos a˜2 : J2 → R tal que ξ ◦ a˜2 = a2 e
a˜1 (s∗ ) = a˜2 (s∗ ), o que é possível, visto que ξ(a˜1 (s∗ )) = a1 (s∗ ) = a2 (s∗ ).
Finalmente, definimos ã : J → R fazendo ã|J1 = a˜1 e ã|J2 = a˜2 .
No caso geral, a existência de ã se reduz aos dois casos particulares abordados
acima, pois, devido a compacidade de J, para toda aplicação contínua a : J → S 1 ,
existe uma decomposição J = J1 ∪· · ·∪Jk como reunião de intervalos justapostos,
de forma que a(Ji ) 6= S 1 para todo i = 1, 2, · · · , k.
35
CAPÍTULO 4. EXEMPLOS E APLICAÇÕES
Quanto a unicidade, devemos observar que se ã, â : J → R são funções contínuas tais que eiã(s) = eiâ(s) para todo s ∈ J, então
f (s) =
â(s) − ã(s)
,
2π
para todo s ∈ J, é um inteiro que depende continuamente de s. Segue, então,
que f (s) é constante. Particularmente, se ã(s0 ) = â(s0 ), então ã = â.
Fixado t0 com a(s0 ) = ξ(t0 ) e obtida uma função-ângulo ã com ã(s0 ) = t0 , as
demais funções-ângulo para a, que devem ter início nos pontos t0 + 2kπ, k ∈ Z,
têm a forma ã0 (s) = ã(s) + 2kπ. Além disso, se a : I → S 1 é um caminho fechado,
toda função-ângulo ã : I → R para a deve ser tal que o número
n(a) =
ã(1) − ã(0)
2π
é inteiro (positivo, negativo ou nulo). Tal inteiro n(a) chama-se o grau do
caminho fechado a e indica o número “líquido” de voltas que o ponto móvel a(s)
dá ao longo de S 1 quando o tempo s varia de 0 a 1.(Líquido significa o número
de voltas positivas - dadas no sentido anti-horário - menos o número de voltas
negativas).
Note que o número n(a) não depende da função-ângulo escolhida, pois duas
quaisquer delas diferem por uma constante, que desaparece ao efetuarmos a diferença ã(1) − ã(0).
Proposição 4.3. Sejam a, b : I → S 1 caminhos fechados. Então:
1. Se a e b têm o mesmo ponto base, vale n(a ∗ b) = n(a) + n(b);
2. Se a e b são livremente homotópicos, tem-se n(a) = n(b);
3. Se n(a) = n(b), então a e b são livremente homotópicos. Além disso, a ∼
=b
quando a e b têm o mesmo ponto base.
4. Dados p ∈ S 1 e k ∈ Z, existe um caminho fechado a : I → S 1 , com base no
ponto p, tal que n(a) = k.
Demonstração:
1. Sejam ã, b̃ : I → R funções-ângulo para a e b, respectivamente, com ã(1) =
b̃(0). Então, faz sentido definirmos ã ∗ b̃ : I → R, a qual será uma funçãoângulo para a ∗ b. Mas, 2π · n(a ∗ b) = ã ∗ b̃(1) − ã ∗ b̃(0) = b̃(1) − ã(0) =
(b̃(1) − b̃(0)) + (ã(1) − ã(0)) = 2π(n(a) + n(b)).
36
CAPÍTULO 4. EXEMPLOS E APLICAÇÕES
2. Primeiramente, consideremos o caso particular em que vale |a(s) − b(s)| < 2
para todo s ∈ I, isto é, os pontos a(s) e b(s) nunca são antípodas. Então, tomando a(0) = eis0 e b(0) = eit0 , podemos supor que |s0 − t0 | < π. Tomemos
funções-ângulo ã, b̃ com ã(0) = s0 e b̃(0) = t0 . Como a(s) e b(s) nunca são
antípodas,
devemos
6= π para
ter ã(s) − b̃(s)
todo s ∈ I. Isto, juntamente
com ã(0) − b̃(0) < π, nos dá ã(s) − b̃(s) < π para todo s. Mas, temos
que 2π(n(a)−n(b)) = ã(1)−ã(0)−b̃(1)+b̃(0) = (ã(1)−b̃(1))−(ã(0)−b̃(0)) <
π + π = 2π. Logo, |n(a) − n(b)| < 1 e, portanto, n(a) = n(b).
O caso geral de dois caminhos fechados livremente homotópicos a, b : I →
S 1 reduz-se a este.
De fato, sendo a homotopia H : I × I → S 1 uniformemente contínua, existe
δ > 0 tal que |t − t0 | < δ ⇒ |H(s, t) − H(s, t0 )| < 2 para todo s ∈ I. Sejam
0 = t0 < t1 < · · · < tk = 1 tais que ti+1 − ti < δ e definamos caminhos
fechados a0 = a, a1 , · · · , ak = b em S 1 , fazendo ai (s) = H(s, ti ). Então,
|ai (s) − ai+1 (s)| < 2 para todo t ∈ I. Isto implica que n(a) = n(a1 ) = · · · =
n(ak−1 ) = n(b).
3. Sejam ã, b̃ : I → R funções-ângulo para a e b respectivamente. A hipótese
n(a) = n(b), garante que ã(1) − ã(0) = b̃(1) − b̃(0). Definamos uma homotopia H : I × I → R, entre ã e b̃, pondo H(s, t) = (1 − t)ã(s) + t · b̃(s). Então,
para todo t ∈ I, vale H(1, t)−H(0, t) = (1−t)(ã(1)−ã(0))+t(b̃(1)− b̃(0)) =
(1 − t) · 2π · n + t · 2π · n = 2π · n, onde n = n(a) = n(b). Daí resulta que,
fazendo K = ξ ◦ H, obtemos uma aplicação contínua K : I × I → S 1 , com
K(s, 0) = a(s), K(s, 1) = b(s) e K(0, t) = K(1, t) para quaisquer s, t ∈ I.
Logo, K é uma homotopia livre entre os caminhos fechados a e b.
Se a e b tiverem o mesmo ponto base, tomaremos ã(0) = b̃(0), consequentemente, ã(1) = b̃(1), e teremos a ∼
= b pela homotopia K.
4. Seja s0 ∈ R tal que ξ(s0 ) = p. O caminho fechado a : I → S 1 , dado por
a(s) = (cos(s0 + 2πks), sen(s0 + 2πks)), tem base no ponto p e admite a
função-ângulo ã(s) = s0 + 2πk · s. Logo, n(s) = [ã(1) − ã(0)]/2π = k.
1
Como mencionamos no início da seção, nosso objetivo é mostrar que π1 (S ) ≈
Z. Neste momento, baseados nas considerações apresentadas acima, somos capazes de comprovar a existência de tal isomorfismo, através da proposição a seguir.
Proposição 4.4. O grupo fundamental do círculo S 1 é isomorfo ao grupo aditivo
Z dos inteiros.
37
CAPÍTULO 4. EXEMPLOS E APLICAÇÕES
Demonstração: A cada classe de homotopia α = [a] de caminhos fechados em
S 1 , associemos o inteiro n(a). Pelo item 2 da proposição anterior, o grau n(a)
depende apenas da classe α, mas não do caminho fechado a que escolhemos para
representá-la. Assim, podemos falar no grau n(α) da classe α e obtemos uma
aplicação n : π1 (S 1 ) → Z. Pelo item 1 da proposição acima, temos que n é um
homomorfismo; pelo item 3, n é injetivo; e pelo item 4, n é sobrejetivo. Logo, n
é um isomorfismo entre π1 (S 1 ) sobre Z.
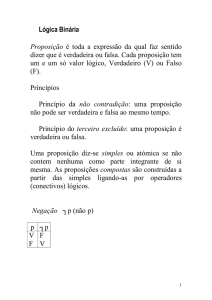
Corolário 4.2. O grupo fundamental do toro T = S 1 × S 1 é abeliano livre, com
dois geradores.
De fato, pela Proposição 3.8, temos que π1 (T ) = π1 (S 1 ) × π1 (S 1 ) = Z × Z.
Um dos geradores de π1 (T ) pode ser tomado como a classe de homotopia de um
paralelo a e o outro como a classe de um meridiano b.
Um caminho fechado c no toro é homotópico a ma + nb se n é o número
“líquido” de vezes em que o caminho c corta o paralelo a e m é o número “líquido”
de vezes em que c corta o meridiano b. (Neste contexto, líquido significa que
contamos apenas as vezes em que c passa de um lado para outro de a ou de b. Além
disso, devemos contar positivamente as passagens para um lado e negativamente
para o outro.)
Por exemplo, o caminho c da figura abaixo é homotópico a a + 3b.
Figura 4.1: Toro
Corolário 4.3. O cilindro C = S 1 × R tem grupo fundamental cíclico infinito.
De fato, C tem o mesmo tipo de homotopia que o círculo S 1 . Um gerador
de π1 (C) é o círculo central a(s) = (eis , 0). Um caminho fechado c no cilindro é
homotópico a n vezes o gerador a quando n é o número líquido de vezes em que
o caminho corta a geratriz u × R, com u = (1, 0) ∈ S 1 .
38
CAPÍTULO 4. EXEMPLOS E APLICAÇÕES
Seguem, abaixo, algumas aplicações de π1 (S 1 ) = Z.
Exemplo 4.1. O toro T = S 1 × S 1 e a esfera S 2 não são homeomorfos.
De fato, apesar de ambos serem conexos e compactos, o π1 (T ) = Z × Z (pela
Proposição 3.8) e π1 (S 2 ) = {0}, pois S 2 é simplesmente conexo (pela Proposição 3.7).
Exemplo 4.2. Os cilindros C = S 1 × I e C = S 1 × R não são homeomorfos.
Com efeito, os dois cilindros possuem o mesmo grupo fundamental (π1 (C =
S 1 × I) = π1 (C = S 1 × R) = Z). Todavia, diferem pela compacidade: C = S 1 × I
é compacto e C = S 1 × R não.
Exemplo 4.3. Sejam
X = (x, y) ∈ R2 ; x2 + y 2 ≤ r e
Y = (x, y) ∈ R2 ; r1 ≤ x2 + y 2 ≤ r2 ,
com r, r1 e r2 números reais positivos. Então, X e Y não são homeomorfos.
De fato, X e Y são compactos e conexos. Contudo, π1 (X) = {0} e π1 (Y ) = Z,
pois Y é homotópico a S 1 .
Exemplo 4.4. S 1 não é simplesmente conexo. Em particular, S 1 não é contrátil.
Analogamente para o toro T = S 1 × S 1 .
4.2
O número de voltas de uma curva plana fechada
Nesta seção, substituiremos o intervalo I = [0, 1] pelo intervalo compacto
J = [s0 , s1 ].
Sejam p um ponto do plano R2 e c : J → R2 − {p} um caminho plano cuja
imagem não contém o ponto p. Existe uma função contínua c̃ : J → R tal que
c(s) = p + ρ(s)eic̃(s) , para todo s ∈ J, onde ρ(s) = |c(s) − p|. A função c̃ é uma
função-ângulo do caminho
s 7→
c(s) − p
|c(s) − p|
em S 1 .
39
CAPÍTULO 4. EXEMPLOS E APLICAÇÕES
Suponhamos, agora, que o caminho c seja fechado, isto é, c(s0 ) = c(s1 ). Então,
para toda função-ângulo c̃, a diferença c̃(s1 ) − c̃(s0 ) é um múltiplo inteiro de 2π,
o qual não depende da escolha de c̃.
O número de voltas que o caminho fechado c : J → R2 − {p} dá em torno do
ponto p é o número inteiro
n(c, p) =
c̃(s1 ) − c̃(s0 )
.
2π
Em outras palavras, n(c, p) é o grau do caminho a : J → S 1 , definido por
a(s) =
c(s) − p
.
|c(s) − p|
A proposição seguinte resume algumas das principais propriedades do inteiro
n(c, p).
Proposição 4.5.
1. Seja c : [s0 , s2 ] → R2 − {p} um caminho tal que c(s0 ) = c(s1 ) = c(s2 ),
onde s0 < s1 < s2 . Tomemos c1 = c|[s0 , s1 ] e c2 = c|[s1 , s2 ]. Então,
n(c, p) = n(c1 , p) + n(c2 , p).
2. Os caminhos fechados c, c0 : [s0 , s1 ] → R2 − {p} são livremente homotópicos
se, e somente se, n(c, p) = n(c0 , p).
3. Se os pontos p e q podem ser ligados por um caminho no complementar
da imagem c(J) do caminho fechado c, então n(c, p) = n(c, q). Em outras
palavras, n(c, p) é, como função de p,(mantido c fixo) constante em cada
componente conexa de R2 − c(J).
4. Dado o caminho fechado c : [s0 , s1 ] → R2 −{p}, sejam ϕ, ψ : [t0 , t1 ] → [s0 , s1 ]
funções contínuas tais que ϕ(t0 ) = ψ(t1 ) = s0 e ϕ(t1 ) = ψ(t0 ) = s1 . Então,
n(c ◦ ϕ, p) = n(c, p) = −n(c ◦ ψ, p).
5. Para todo k ∈ Z e todo p ∈ R2 , o caminho fechado c : [0, 2π] → R2 − {p},
dado por c(s) = p + eiks , cumpre n(c, p) = k.
6. Sejam c, c0 : J → R2 − {p} caminhos fechados tais que, para todo s ∈ J, o
segmento de reta [c(s), c0 (s)] não contém o ponto p. Então, n(c, p) = n(c0 , p).
7. Sejam c, c0 : J → R2 − {0} caminhos fechados. Se |c(s) − c0 (s)| < |c(s)|
para todo s ∈ J, então n(c, 0) = n(c0 , 0). (Rouché)
Demonstração:
40
CAPÍTULO 4. EXEMPLOS E APLICAÇÕES
1. Seja c̃ : [s0 , s2 ] → R uma função-ângulo para c. Então, as restrições c̃1 =
c̃|[s0 , s1 ] e c̃2 = c̃|[s1 , s2 ] são funções-ângulo para c1 e c2 respectivamente.
Disto, segue o resultado.
2. Como a aplicação hp : R2 − {p} → S 1 , dada por
hp (z) =
z−p
,
|z − p|
é uma equivalência homotópica e (hp ◦c)(s) = eic̃(s) , temos n(c, p) = n(hp ◦c).
Logo, c ∼
= c0 ⇔ hp ◦ c ∼
= hp ◦ c0 ⇔ n(hp ◦ c) = n(hp ◦ c0 ) ⇔ n(c, p) = n(c0 , p).
3. Seja a : I → R2 − c(J) um caminho tal que a(0) = p e a(1) = q. Definamos
H : J × I → S 1 por
H(s, t) =
c(s) − a(t)
.
|c(s) − a(t)|
Então, baseados na notação do item anterior, temos H(s, 0) = hp ◦ c e
H(s, 1) = hq ◦ c para todo s ∈ J. Logo, H é uma homotopia livre entre os
caminhos fechados hp ◦ c, hq ◦ c : J → S 1 . Segue que n(c, p) = n(hp ◦ c) =
n(hq ◦ c) = n(c, q).
4. Segue da Proposição 3.6.
5. Evidente.
6. Consequência do item 2 acima e do exemplo 2.1.
7. Segue do item anterior.
Exemplo 4.5. Seja p : C → C o polinômio complexo de grau k > 0, dado por
p(z) = a0 + a1 z + · · · + ak z k .
Para todo número real r ≥ 0, p transforma o círculo de centro 0 e raio r numa
curva fechada do plano (quando r = 0, o círculo se degenera em um ponto).
Supondo que p não possua raízes z com |z| = r, queremos determinar quantas
voltas em torno da origem dá essa curva fechada. Mais precisamente, sendo
cr : [0, 2π] → C − {0} o caminho fechado definido por cr (s) = p(r · eis ), nosso
objetivo é determinar n(cr , 0). Em geral, este número depende de r, pois, supondo
o polinômio p fixado, para cada r > 0 tal que p não possui raiz de módulo r, o
número n(cr , 0) é igual ao número de raízes de p com módulo menor do que r,
41
CAPÍTULO 4. EXEMPLOS E APLICAÇÕES
contadas de acordo com suas multiplicidades. Todavia, provaremos apenas que,
para todo r suficientemente grande, vale n(cr , 0) = k.
Quando o polinômio p(z) = ak z k se reduz a um monômio, a afirmação acima
fica evidente. No caso geral, podemos escrever p(z) = ak z k + q(z), onde q(z) é
um polinômio de grau ≤ k − 1. Assim,
p(z) − ak z k = ak z k · f (z), com f (z) = q(z) ,
ak z k
e, portanto,
lim f (z) = 0.
|z|→∞
Logo, existe um número real positivo r0 tal que
|z| = r > r0 ⇒ p(z) − ak z k < ak z k .
Segue, então, do Teorema de Rouché, que o caminho fechado cr dá k voltas
em torno da origem para todo r > r0 .
Aplicação: O Teorema Fundamental da Álgebra.
O enunciado do teorema diz que todo polinômio complexo de grau k > 0
possui ao menos uma raiz complexa.
Suponha, por absurdo, que p(z) 6= 0 para todo z ∈ C. Então, cr : [0, 2π] →
C − {0} está definido para todo r ≥ 0. Note que, para quaisquer r, r0 reais nãonegativos temos cr ' cr0 , através da homotopia H(s, t) = p(((1 − t)r + tr0 )eis ).
Portanto, n(cr , 0) não depende de r. Ora, n(c0 , 0) = 0, pois c0 é constante.
Contudo, como visto anteriormente, n(cr , 0) = k para r suficiente grande. E,
assim, chegamos a uma contradição. Logo, devemos ter p(z) = 0 para algum z.
4.3
O número de voltas expresso como integral
curvilínea
Uma forma diferencial, de grau 1, em um aberto U ⊂ R2 é uma expressão do
tipo
ω = f dx + gdy,
onde f, g : U → R são funções de classe C 1 em U , isto é, possuem derivadas
parciais contínuas em todos os pontos de U .
Apresentaremos, a seguir, algumas considerações sobre formas diferenciais:
42
CAPÍTULO 4. EXEMPLOS E APLICAÇÕES
1. Sempre que restringirmos a forma ω a um caminho c : J → U , de classe
C 1 , com c(t) = (x(t), y(t)) e J = [t0 , t1 ], substituiremos dx por x0 (t)dt e dy
por y 0 (t)dt.
2. Dizemos que ω = f dx + gdy e ω1 = f1 dx + g1 dy, definidas no mesmo aberto
U ⊂ R2 , são iguais quando f = f1 e g = g1 .
3. A soma das formas ω e ω1 , como definidas no item anterior, é a forma
ω + ω1 = (f + f1 )dx + (g + g1 )dy.
4. O produto da forma ω pela função h : U → R é a forma hω = hf ·dx+hg·dy.
Não multiplicaremos duas formas diferenciais.
5. Dada a forma ω em U , se existir ϕ : U → R, de classe C 2 , tal que
ω = dϕ =
∂ϕ
∂ϕ
dx +
dy,
∂x
∂y
diremos que ω é uma forma exata.
Sejam ω = f dx+gdy uma forma diferencial no aberto U ⊂ R2 e c : J → U um
caminho de classe C 1 em U , dado por c(t) = (x(t), y(t)), t ∈ J, onde x, y : J → R
são funções continuamente deriváveis e J = [t0 , t1 ].
A integral (curvilínea) da forma ω ao longo do caminho c é definida por
Z
Z t1
ω=
[f (x(t), y(t)) · x0 (t) + g(x(t), y(t)) · y 0 (t)]dt.
c
t0
Propriedades. Dados uma forma diferencial ω num aberto U ⊂ R2 e um
caminho c : J → U , de classe C 1 , onde J = [t0 , t1 ], tem-se:
1. Seja J = J1 ∪ J2 reunião de dois intervalos compactos com um extremo em
comum. Fazendo c1 = c|J1 e c2 = c|J2 , temos
Z
Z
Z
ω=
ω+
ω.
c
c1
c2
2. Sejam ϕ, ψ : [s0 , s1 ] → [t0 , t1 ] funções de classe C 1 , com ϕ(s0 ) = ψ(s1 ) = t0
e ϕ(s1 ) = ψ(s0 ) = t1 . Então,
Z
Z
ω= ω
c◦ϕ
c
Z
Z
ω=−
e
c◦ψ
ω.
c
O caminho c ◦ ψ será representado por −c.
43
CAPÍTULO 4. EXEMPLOS E APLICAÇÕES
Sejam ω = dϕ uma forma exata, diferencial da função ϕ : U → R, de classe
C 2 , e c : J → U um caminho de classe C 1 . A derivada da função composta
ϕ ◦ c : J → R, pela regra da cadeia, vale
(ϕ ◦ c)0 (t) =
d
∂ϕ 0 ∂ϕ 0
ϕ(x(t), y(t)) =
x +
y.
dt
∂x
∂y
Segue, então, que
Z
Z
Z t1 ∂ϕ 0 ∂ϕ 0
x +
y dt =
ω = dϕ =
∂x
∂y
t0
c
c
Z t1
(ϕ ◦ c)0 (t)dt = ϕ(c(t1 )) − ϕ(c(t0 )).
=
t0
R
Particularmente, temos que, se ω = dϕ é uma forma exata, a integral c ω
R
depende apenas dos extremos c(t0 ) e c(t1 ). Isto é, c ω = 0 para todo caminho
fechado c em U .
Uma forma diferencial ω = f dx + gdy, em um aberto U ⊂ R2 , chama-se
fechada quando, em U ,
∂g
∂f
=
.
∂y
∂x
Por exemplo, se ω é exata, digamos ω = dϕ, então
f=
∂ϕ
∂x
e g=
∂ϕ
;
∂y
logo,
∂2ϕ
∂2ϕ
∂g
∂f
=
=
=
.
∂y
∂y∂x
∂x∂y
∂x
Portanto, toda forma exata é fechada. Todavia, a recíproca não é verdadeira;
isto é, nem toda forma fechada é exata. Vejamos:
Consideremos no aberto U = R2 − {0} a forma diferencial
ω=
−y
x
dx
+
dy.
x2 + y 2
x2 + y 2
Temos, então,
f=
−y
+ y2
x2
e g=
x2
x
.
+ y2
Logo,
∂f
∂g
y 2 − x2
=
= 2
.
∂y
∂x
(x + y 2 )2
44
CAPÍTULO 4. EXEMPLOS E APLICAÇÕES
Portanto, ω é uma forma fechada. No entanto, ω não é exata em U , isto é, não
existe ϕ : U → R, de classe C 2 , tal que ω = dϕ, pois, se existisse, a integral de ω
ao longo de qualquer caminho fechado de classe C 1 por partes (c : J → U , com
J = J1 ∪ J2 ∪ · · · ∪ Jk , onde cada Ji é um intervalo compacto que tem exatamente
um ponto em comum (um extremo) com Ji+1 e, tomando ci = c|Ji , i = 1, · · · , k,
cada ci é de classe C 1 ), contido em U , seria 0; o que não ocorre, segundo a
proposição abaixo.
Proposição 4.6. Seja c : J → R2 − {0} um caminho fechado, de classe C 1 por
partes. Então,
Z
1
n(c, 0) =
2π
ω, onde ω =
c
−y
x
dx
+
dy.
x2 + y 2
x2 + y 2
Suponha que c(t) = (x(t), y(t)) seja de classe C 1 em todo J.
c(t)
Seja θ : J → R uma função-ângulo para c, isto é, a função-ângulo da curva
.
|c(t)|
Temos que x = ρcos(θ) e y = ρsen(θ), onde ρ2 = x2 + y 2 e x, y, ρ e θ são as
Demonstração:
abreviações de x(t), y(t), ρ(t) e θ(t) respectivamente. Derivando, temos
x0 = ρ0 cos(θ) − ρsen(θ) · θ0
y 0 = ρ0 sen(θ) + ρcos(θ) · θ0
Substituindo,
Z
Z
s1
ω =
c
Zs0s1
=
x
−y
0
0
x + 2
y dt =
x2 + y 2
x + y2
θ0 (t)dt = θ(s1 ) − θ(s0 ) = 2π · n(c, 0).
s0
No caso geral, temos uma partição P = {s0 = t0 < t1 < · · · < tk = s1 } tal que,
para cada i = 1, · · · , k, as restrições ci = c|[ti−1 , ti ] e θ|[ti−1 , ti ] são de classe C 1 .
Então,
Z
ω=
c
k Z
X
i=1
ω=
ci
k
X
[θ(ti ) − θ(ti−1 )] = θ(s1 ) − θ(s0 ).
i=1
Como o caminho c é fechado, θ(s1 ) − θ(s0 ) é um múltiplo inteiro de 2π. Logo,
Z
ω = 2π · n(c, 0).
c
Observação 4.1. A forma diferencial ω, definida em R2 − {0}, é chamada o
elemento de ângulo no plano.
45
CAPÍTULO 4. EXEMPLOS E APLICAÇÕES
A proposição acima representa o número de voltas de um caminho C 1 por
partes em torno da origem em R2 como a integral de uma certa forma diferencial
ω.
Para encerrar, mostraremos que o número de voltas n(c, 0) que um caminho
fechado c : J → R2 −{0}, de classe C 1 por partes, dá em torno da origem também
pode ser expresso através de uma integral complexa:
Z
1
dz
, com z ∈ C.
n(c, 0) =
2πi c z
De fato, na integral acima, temos
dz = dx + idy
e
1
1
x − iy
=
= 2
z
x + iy
x + y2
Logo,
dz
(x − iy)(dx + idy)
=
= ω1 + iω2 ,
z
x2 + y 2
onde
ω1 =
ω2 =
Mas ω1 = d(log
p
x
y
dx
+
dy
x2 + y 2
x2 + y 2
x
−y
dx + 2
dy.
2
+y
x + y2
x2
x2 + y 2 ) é uma forma exata em R2 −{0} e, portanto,
R
c
ω1 =
0 para todo caminho fechado c, de classe C 1 por partes em R2 − {0}.
Por outro lado, ω2 é o elemento de ângulo no plano; logo,
Z
Z
dz
= i ω2 = 2πi · n(c, 0).
c z
c
46
Conclusões
O projeto encerra-se tendo concluído todos os tópicos previstos e alcançado
os objetivos desejados, visto que, para o Trabalho de Conclusão de Curso B,
a principal proposta era estudar o Grupo Fundamental, incluindo exemplos e
aplicações.
Foi um trabalho muito proveitoso e enriquecedor, pois retomou conteúdos
vistos anteriormente e acrescentou novos saberes, os quais não são estudados na
Graduação.
Com este relatório, encerramos as atividades referentes ao último período do
curso de Licenciatura em Matemática.
47
Bibliografia
[1] LIMA, E. L.: Grupo Fundamental e Espaços de Recobrimento, Instituto
de Matemática Pura e Aplicada, Rio de Janeiro, Projeto Euclides, 1993.
[2] MUNKRES, J.R.: Topology: a first course, Prentice Hall College Div, June
1974.
[3] LIMA, E. L.: Espaços Métricos, Instituto de Matemática Pura e Aplicada,
Rio de Janeiro, Projeto Euclides, 1977.
[4] LIMA, E. L.: Elementos de Topologia Geral, Instituto de Matemática Pura
e Aplicada, Rio de Janeiro, 1970.
[5] SHIRALI, S., VASUDEVA, H. L.; Metric Spaces, Springer-Verlag, 2006.
48