Anais do 12O Encontro de Iniciação Científica e Pós-Graduação do ITA – XII ENCITA / 2006
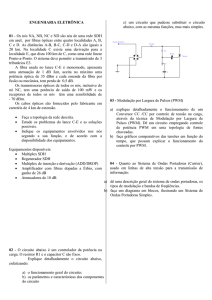
Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, Brasil, Outubro, 16 a 19, 2006
Modelagem e simulação de conversores DC-DC utilizando topologia Buck
para o Satélite Universitário ITASAT.
Leandro Gaspari Rodrigues
Escola de Engenharia de São Carlos, Departamento de Engenharia Elétrica – Universidade de São Paulo
Rua Nicoleta Stella Germano, 60, Apartamento 113 - Jardim Paraíso
CEP: 13561-090 - São Carlos – SP.
[email protected]
Bruno Gabriel Gustavo Leonardo Zambolini Vicente
Escola de Engenharia de São Carlos, Departamento de Engenharia Elétrica – Universidade de São Paulo
Rua Célio Barbosa da Silva, 461 – Santa Paula
CEP: 13564-060 - São Carlos – SP.
[email protected]
Renato Machado Monaro
Escola de Engenharia de São Carlos, Departamento de Engenharia Elétrica – Universidade de São Paulo
Rua Célio Barbosa da Silva, 461 – Santa Paula
CEP: 13564-060 - São Carlos – SP.
[email protected]
José Roberto Boffino de Almeida Monteiro
Escola de Engenharia de São Carlos, Departamento de Engenharia Elétrica – Universidade de São Paulo
Avenida Trabalhador São Carlense, 400 - Centro
CEP: 13566-590 - São Carlos – SP.
[email protected]
Azauri Albano de Almeida Júnior
Escola de Engenharia de São Carlos, Departamento de Engenharia Elétrica – Universidade de São Paulo
Avenida Trabalhador São Carlense, 400 - Centro
CEP: 13566-590 - São Carlos – SP.
[email protected]
Manoel Luís Aguiar
Escola de Engenharia de São Carlos, Departamento de Engenharia Elétrica – Universidade de São Paulo
Avenida Trabalhador São Carlense, 400 - Centro
CEP: 13566-590 - São Carlos – SP.
[email protected]
Resumo. Este trabalho apresenta um estudo e a simulação por software de conversores DC-DC de topologia Buck. A pesquisa
realizada busca identificar as características de funcionamento para este tipo de conversor, baseando-se em dispositivos
comerciais utilizados em satélites, especificações do projeto ITASAT, arquiteturas utilizadas pelo INPE e características de
alimentação das cargas que compõem o satélite. A implementação do conversor foi realizada através de softwares livre. Com a
utilização destas ferramenta foi possível simular diversos circuitos com a mesma função, porém de montagens e valores
diferentes. A utilização de software foi proposta já que este tipo de circuito, quando em fase de testes, pode sofrer danos
causados pelo dimensionamento incorreto de componentes, acarretando em maiores custos de desenvolvimento. Por último são
apresentados os resultados obtidos nas simulações, que serão utilizados para a montagem do conversor.
Palavras Chave: Conversores DC-DC, Topologia Buck, Simulação, Software Livre.
1. Introdução
Com a realização do projeto do satélite universitário brasileiro (Projeto ITASAT), fez-se necessário o
desenvolvimento de conversores DC-DC capazes de condicionar a tensão e a corrente provenientes do barramento
de energia para as diversas cargas existentes no satélite.
Este trabalho propõe o estudo e a simulação por software de um conversor DC-DC de topologia Buck,
baseado em dispositivos comerciais utilizados em satélites, especificações do Projeto ITASAT, arquiteturas
utilizadas pelo INPE e necessidades de alimentação das cargas que compõem o satélite.
Anais do 12O Encontro de Iniciação Científica e Pós-Graduação do ITA – XII ENCITA / 2006
Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, Brasil, Outubro, 16 a 19, 2006
2. Conversor tipo Buck
A escolha da topologia do conversor foi baseada em características comerciais e especificações do projeto
ITASAT, de forma a atender as necessidades básicas de alimentação de cargas que compõem o satélite. Sendo
assim, a opção pela topologia Buck atende estas características (Chryssis – 1984, Luo – 2003, Patel – 2005).
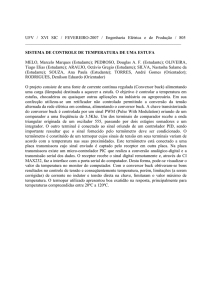
Figura 1. Conversor tipo Buck.
A configuração de um conversor DC-DC do tipo Buck é mostrada na Fig. 1. O transistor M1 opera como
uma chave fechada durante tempo t on e aberta durante t off . O controle destes tempos é feito pelo sinal PWM (Pulse
Width Modulation).
Quando M1 está em t on , a potência de Vi é entregue para carga R L através do indutor L. Considera-se V1 ,
tensão na saída do transistor, igual a Vi ,tensão de entrada do circuito, ou seja, despreza-se a tensão sobre M1.
Durante este mesmo período, o diodo D está com polarização reversa e o capacitor C está sendo carregado.
No tempo t off , o transistor M1 está aberto e com isso o indutor L inverte sua polarização para manter a
corrente sobre ele, tornando V1 negativa. Sendo assim, o diodo D passa a conduzir mantendo corrente na carga. A
função do indutor L e do capacitor C é fazer com que a tensão Vo fique mais próxima de um sinal DC puro.
A corrente sobre o indutor L é a mesma que a corrente de carga mais um ripple, ∆I L , devido à mudança de
estado do transistor. Para determinar o ripple de corrente utilizou-se uma regra prática em que o ∆I LPico − Pico deve ser
40% da corrente média I o .
Figura 2. Corrente no indutor relacionada ao período de chaveamento do transistor.
Para determinar o valor do indutor L utilizou-se a Eq. (1) e a Fig. 2, sendo v L (t) a tensão no mesmo. Além
disso, considerou-se a variação de corrente no indutor L em t on , ∆I Lon , igual à variação de corrente para em t off ,
∆I Loff .
v L (t ) = L
di
dt
(1)
Através da Eq. (1), definem-se as relações para ∆I Lon e ∆I Loff . Estas relações são dadas pelas Eq. (2) e (3),
respectivamente.
∆I Lon =
(Vi − Vo )
t on
L
(2)
Anais do 12O Encontro de Iniciação Científica e Pós-Graduação do ITA – XII ENCITA / 2006
Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, Brasil, Outubro, 16 a 19, 2006
∆I Loff =
Vo
t off
L
(3)
A Eq. (4) apresenta a relação entre Vi e Vo . O termo δ =
t on
recebe o nome de Ciclo de Trabalho, sendo T
T
o período do sinal de PWM.
Vo = Vi .δ
(4)
Através da relação entre a potência de entrada Pi e a de saída Po é possível definir a eficiência do circuito.
A Eq. (5) apresenta a expressão que relaciona estas potências e determina a eficiência máxima η máx .
η máx =
Po
=
Pi
t
Vi on I o +
T
Vo I o
(V M1 t on + V D t off )
T
(5)
Io
2.1 Cálculo do Indutor L
O cálculo do indutor L é feito utilizando-se as Eq. (2) e (3) (Magalhães – 2003). Através delas, encontram-se
as expressões para t on e t off , respectivamente. Com estas expressões é possível determinar o valor do indutor L. As
Equações (6) a Eq. (8) apresentam as passagens para a determinação da Eq. (9), que é utilizada para calcular o
indutor. Na Equação (8) foi feita a seguinte consideração: ∆I Lon = ∆I Loff =0.4 I o . A freqüência do sinal de PWM é
dada por f PWM .
t on =
t off =
∆I Lon L
Vi − V o
∆I Loff L
(7)
Vo
t on + t off = T =
L=
(6)
0.4I o L 0.4I o L
+
Vi − V o
Vo
(8)
2.5Vo (Vi − Vo )
Vi I o f PWM
(9)
2.2 Cálculo do capacitor C
A corrente no capacitor C, I C , é dada pela Eq. (10) (Magalhães – 2003). Ela é a diferença entre a corrente no
indutor L, I L , e a corrente I o na carga.
IC = I L − Io
(10)
Observa-se da Fig. 2 que a corrente I C passa pelo capacitor C durante metade do tempo de t on e metade do
tempo de t off . Além disso, observa-se que a corrente que flui durante esse tempo é
∆I
4
. Utilizando-se a Eq. (11), é
possível determinar uma expressão para o valor do capacitor a ser utilizado.
i C (t) = C
dv
dt
(11)
As Equações (12) e (13) apresentam os passos para definir a Eq. (14), utilizada para calcular o capacitor C. O
ripple presente na tensão Vo está representado pelo termo ∆V oPico − Pico .
Anais do 12O Encontro de Iniciação Científica e Pós-Graduação do ITA – XII ENCITA / 2006
Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, Brasil, Outubro, 16 a 19, 2006
∆V oPico− Pico =
∆I L (t on + t off )
4C
2
(12)
Substituindo na Eq. (12) as Eq. (2) e (4), tem-se a Eq. (13). Reescrevendo–a, encontra-se a expressão
utilizada para o cálculo de C dado pela Eq. (14).
∆V oPico − Pico =
C=
(V i − V o )V o T 2
8Vi LC
(V i − V o )V o T 2
8∆VoPico − PicoVi L
(13)
(14)
3. Software
A produção e o aprimoramento de projetos em engenharia elétrica agregaram, principalmente depois da
disseminação da computação pessoal, a simulação computacional como elemento central do desenvolvimento,
possibilitando uma drástica redução do custo final, através da dinamização das várias etapas de testes e produção.
Para tanto, os softwares disponíveis no mercado são, na grande maioria, proprietários, acarretando em elevados
custos de aquisição das licenças, sendo por vezes o fator decisivo na implementação de projetos.
Como alternativa, em franca ascendência, tem-se os softwares de plataforma livre, ou seja, de licença livre e
muitas vezes de código aberto. Neste trabalho utilizou-se, em todas as etapas, do desenvolvimento de esquemáticos
aos testes, esta vertente de softwares, sobre uma estação de trabalho rodando sistema operacional Linux.
Para o desenvolvimento dos esquemáticos eletrônicos foi utilizado o gEDA Gschem. Esta ferramenta possibilita
tanto a produção de esquemáticos como a associação ou edição de símbolos ou componentes eletrônicos. A partir do
esquemático elétrico, o software gEDA Gnetlist foi solicitado para converter o esquemático em entrada compatível
com o software de simulação e análise Gnucap, equivalente do Spice, de plataforma Windows, no ambiente Linux.
O Gnucap tem seu funcionamento idêntico aos softwares Spice-like para Windows, constando de arquivos de
entrada na forma texto, onde os componentes do circuito são dispostos e localizados através dos seus nós de
conexão, assim como todas as formas de análises são por observação entre nós. A saída do Gnucap é em forma de
texto, mas utilizou-se o pacote geração de gráficos Gnuplot, que fornece a saída gráfica de tensão ou corrente para os
nós ou componentes especificados.
4. Modelo do Circuito Integrado LM3524
Este circuito integrado constitui um controlador PWM, que foi utilizado neste trabalho para acionar o
transistor M1. A freqüência máxima de seu oscilador interno é de 350kHz. A elevada freqüência de seu oscilador
proporciona projetos de conversores DC-DC mais compactos, pois a tendência é a diminuição do tamanho dos
componentes (Sedra – 2000, Saverns – 1985). Ao mesmo tempo, os semicondutores, tais como transistores e diodos,
são altamente exigidos, o que pode acarretar em danos aos mesmos.
A modelagem deste circuito integrado é importante, pois possibilita a simulação de conversores DC-DC que
venham utilizar o componente na prática. Além disso, por possuir versão com certificação espacial, este circuito
integrado configura como uma boa opção para o projeto do satélite universitário ITASAT.
Tratando-se de um dispositivo virtual, o problema de danos devido ao mau dimensionamento de componentes
externos, ou até mesmo pelo uso errôneo, não acarretará em perda de material. Isso permite analisar diversas
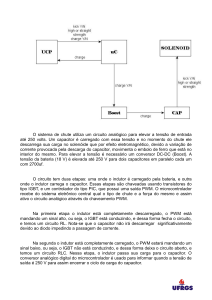
configurações de operação do componente, até as mais extremas sem risco algum. A Fig. 3 apresenta o diagrama em
blocos do LM3524 (National Semiconductor Corporation, LM2524D/LM3524D
Regulating Pulse Width Modulator).
Anais do 12O Encontro de Iniciação Científica e Pós-Graduação do ITA – XII ENCITA / 2006
Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, Brasil, Outubro, 16 a 19, 2006
Figura 3 - Diagrama em blocos do circuito integrado LM3524.
A Figura 4 apresenta a disposição dos pinos no circuito integrado.
Figura 4 - Diagrama de conexões do LM3524(National Semiconductor Corporation, LM2524D/LM3524D
Regulating Pulse Width Modulator).
Toda a modelagem foi realizada através do software gEDA Gschem. Os blocos que compõem o LM3524
foram implementados por meio de circuitos eletrônicos e algumas funções que o software disponibiliza. O
agrupamento dos blocos deu origem ao modelo completo do circuito integrado, posteriormente simulado no Gnucap
e sua saída gráfica obtida pelo pacote gráfico Gnuplot.
5. Circuito para simulação
Após a etapa de modelagem do circuito integrado LM3524, implementou-se o conversor tipo Buck
apresentada pela Fig. 5. Tendo em vista o desenvolvimento de um projeto que envolve componentes com
certificação espacial, acarretando em maiores custos, optou-se pela redução do número de transistores. Para isto
utilizou-se um driver de mosfet composto por um transformador de pulso e um transistor bipolar. Esta configuração
suporta apenas um ciclo de trabalho de aproximadamente 47%, a fim de não saturar o núcleo do transformador.
Considerando o fator de trabalho delimitado pelo transformador, fazem-se necessárias modificações nas
equações para o cálculo do indutor L e do capacitor C.
L=
2.5Vo (V i − V o )
.δ
V i I o f PWM
(15)
Anais do 12O Encontro de Iniciação Científica e Pós-Graduação do ITA – XII ENCITA / 2006
Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, Brasil, Outubro, 16 a 19, 2006
C=
(Vi − Vo )V o T 2 1
.
8∆VoPico − PicoVi L δ
(16)
Utilizando as correções introduzidas acima, foram definidos os parâmetros de circuito para simulação:
Tensão de saída Vo = 5V
Carga: R L = 2 Ω
Ripple de tensão: ∆Vo = 10mV Pico − Pico
Freqüência do PWM: f PWM = 100kHz
Corrente de saída: I o = 2.5 A
Ripple de corrente: ∆I L = 0.4I o
Indutor: L = 18 µH
Capacitor: C = 266 µF
Tensão de entrada: Vi = 20V
Resistor: R5 = 120mΩ
O resistor R5 trabalha como limitador de corrente. Sempre que a corrente provocar uma queda de tensão de
aproximadamente 0.7V, o transistor Q2 entra em condução colocando o Pino10 do LM3524 em nível 1.
Figura 5. Conversor DC-DC tipo Buck - Freqüência de PWM igual a 100kHz.
Os valores de RT e C T foram calculados através da Eq. (15) e da Fig. 6, ambos retirados da folha de dados do
LM3524(National Semiconductor Corporation, LM2524D/LM3524D Regulating Pulse Width Modulator).
f PWM =
1
RT C T
(15)
Anais do 12O Encontro de Iniciação Científica e Pós-Graduação do ITA – XII ENCITA / 2006
Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, Brasil, Outubro, 16 a 19, 2006
Figura 6. Freqüência do PWM.
6. Simulação
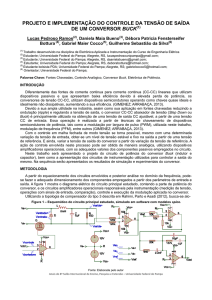
Através do software Gnucap, simulou-se o circuito da Fig. 5. Na primeira etapa, analisou-se o início da
operação do circuito, apresentada na Fig. ,7 observando-se o sinal da tensão da rampa V(CT), o sinal do sensor de
sobrecorrente V(RS), que limita a corrente I(R1). Como exposto anteriormente, pode-se verificar, através do sinal
I(R1) , o ciclo de trabalho imposto pela condição de operação do transformador de pulso.
Inicio de Operacao
7
I(RL)
V(CT)
I(R1)
V(RS)
V(RL)
6
5
4
3
2
1
0
-1
0
2e-05
4e-05
6e-05
8e-05
0.0001
Tempo(s)
Figura 7 - Conversor tipo Buck operando em 100kHz - Inicío da operação.
Na Figura 8, V(Cgs) representa a tensão no gate do mosfet, indicando o período em que o transistor M1 está
conduzindo. A carga e descarga desta capacitância de gate podem ser observadas pelos pulsos positivo e negativo,
respectivamente, da corrente I(Rg). O sinal VO(S1) aponta a descarga da energia de magnetização do
transformador, apresentando uma oscilação de segunda ordem, relativo ao momento de corte do mosfet.
Anais do 12O Encontro de Iniciação Científica e Pós-Graduação do ITA – XII ENCITA / 2006
Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, Brasil, Outubro, 16 a 19, 2006
30
VO(S1)
V(Cgs)
I(Rg)*1000
I(Vref)*1000
20
10
0
-10
-20
0
5e-06
1e-05
time(s)
1.5e-05
2e-05
Figura 8 - Detalhe do funcionamento do driver de mosfet.
Regime Permante
7
I(RL)
V(CT)
I(R1)
VO(E1)
V(RL)
6
5
4
3
2
1
0
-1
0
0.0001
0.0002
0.0003
0.0004
Tempo(s)
0.0005
0.0006
0.0007
0.0008
Figura 9 - Conversor tipo Buck operando em 100kHz - Regime permanente.
A saída relativa ao bloco interno Error Amplifier, representada pelo sinal VO(E1) na Fig. 9, decresce e
estabiliza no momento em que a tensão na carga RL se aproxima do valor requisitado, igual a 5V. Observando o
sinal I(R1), nota-se a operação do limitador de corrente, que realiza um picotamento da corrente fornecida pela fonte
Vi. O filtro LC conduz suavemente a tensão V(RL) e a corrente I(RL) para um sinal dc mais uma pequena
ondulação (ripple).
Anais do 12O Encontro de Iniciação Científica e Pós-Graduação do ITA – XII ENCITA / 2006
Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, Brasil, Outubro, 16 a 19, 2006
7. Conclusão
Este trabalho apresentou um método alternativo para o desenvolvimento de projetos de conversores DC-DC,
através da modelagem e simulação computacional de componentes comerciais, incluindo o circuito integrado
LM3524, um controlador de PWM. Desta maneira, obtiveram-se os parâmetros necessários para a implementação
em hardware do dispositivo, de forma direta e precisa, dispensando a etapa de testes e eliminando a necessidade de
componentes eletrônicos sobressalentes. Outro fator inovador foi a utilização de softwares livre para realizar todas
as etapas do projeto, eliminando-se a aquisição de licenças, acarretando baixo custo de desenvolvimento.
Os resultados obtidos foram satisfatórios, aproximando-se da resposta esperada para a configuração do
conversor testado. A implementação dos blocos internos do circuito integrado comercial LM3524 permitiu a
observação de sinais de controle inacessíveis em montagens na prática, constituindo grande vantagem na fase de
desenvolvimento e teste.
8. Agradecimento
Os autores agradecem a AEB (Agência Espacial Brasileira) pelo suporte financeiro dado ao projeto ITASAT.
Agradece também ao ITA e ao INPE pelo suporte técnico, logístico e pelas especificações do satélite.
9. Referências
Chryssis, G., 1984, “High-frequency switching power supplies”, McGraw-Hill, Inc., 1a Ed., 221p.
Luo, F. L. and Ye, H., 2003, “Advanced DC/DC Converters”, CRC Press LCC, 1a Ed., 756p.
Magalhães, R. O., 2003, “Compensation design for switching power supply in buck topology and voltage mode
control”, Instituto Nacional de Pesquisas Espaciais – INPE, São José dos Campos, Brasil, pp7-17.
Patel, M. R.,2005, “Spacecraft power systems”, CRC Press LCC, 1 Ed., 693p.
Sedra, Adel S., K.C. Smith, 2000 “Microeletrônica”, Makron 4a. Ed c2000, 1270p.
Severns, R. P. and Bloom, G., 1985,”Modern DC-to-DC switchmode power converter circuits”, Van Nostrand
Reinhold Company Inc., 1a Ed, 342p.
National Semiconductor Corporation, 2005,”LM2524D/LM3524D Regulating Pulse Width Modulator”,
http://www.national.com/, 22p.