4. Equações para Máquinas Hidráulicas
4.1 Movimentos Absoluto e Relativo
Antes de escrever as equações para as máquinas de fluxo, relembra-se os conceitos de
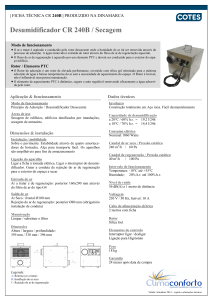
movimento absoluto e movimento relativo. Considere a Figura 4.1, em que um sistema de
coordenadas está atachado a um corpo em movimento. O sistema de coordenadas OXYZ é
inercial (fixo) enquanto o sistema de coordenadas fixo ao corpo móvel (oxyz) é não inercial,
podendo transladar em relação a OXYZ e girar
z
y
Z
P
r
o
R
I
K
Ro
O J
x
Y
X
Figura 4.1 Movimentos absoluto e relativo de um ponto P.
G
A coordenada de um ponto P no sistema móvel é dada pelo vetor r , enquanto que no sistema
G
fixo, o mesmo ponto tem coordenadas definidas pelo vetor R . A origem do sistema móvel
G
tem como coordenadas no sistema fixo o vetor Ro , de modo que se tem a soma vetorial
G G G
R = Ro + r
A velocidade do ponto P, no sistema fixo
G será,G então,
G
dR dRo dr
=
+
dt
dt
dt
G
G G
G
G
Como o vetor r é definido por r = xi + yj + zk , resulta
G
G
G
G
G
dR dRo ⎛ dx G dy G dz G ⎞ ⎛ di
dj
dk ⎞
=
+⎜ i +
j + k ⎟+⎜x + y + z
⎟
dt
dt ⎝ dt
dt
dt ⎠ ⎝ dt
dt
dt ⎠
G G G
Pode-se demonstrar que as derivadas dos vetores i , j , k
são da forma
G
G G G
G G G
G G
di / dt = ω × i , dj / dt = ω × j , dk / dt = ω × k . Portanto, se obtém
G G G G G
c = co + w + ω × r
G
G dR
Em que c =
é a velocidade absoluta do ponto P, ou seja a velocidade de P em relação ao
dt
G
G dRo
é a velocidade absoluta de translação da origem do sistema móvel em
sistema fixo. co =
dt
G dx G dy G dz G
relação ao sistema fixo. w = i +
j + k é a velocidade relativa do ponto P em relação
dt
dt
dt
G
ao sistema móvel. ω e velocidade de rotação do ponto P. No caso de máquinas que estão
fixas e só tem movimento de rotação
G G G G G G
c = w+ω×r = w+ u
que forma um triângulo denominado de triangulo de velocidades.
4.2. Elementos Cinemáticos Básicos
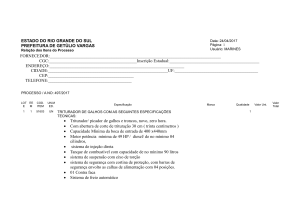
As projeções meridiana (plano meridiano) e normal (plano normal) dos rotores de
máquinas motoras e geradoras são mostradas na Figura 4.2, lado esquerdo e lado direito
respectivamente. Os pontos 4 e 5 coincidem com as arestas de entrada e saída do rotor
respectivamente. No caso de bombas, o ponto 4 é denominado de aresta de sucção e o ponto 5
é denominado aresta de pressão. Para turbinas o sentido do fluxo é invertido e a denominação
dos pontos 4 e 5 também é invertida. De acordo com numeração da Figura 4.2, o ponto 3 está
localizado imediatamente antes da aresta de entrada do rotor e o ponto 6 está imediatamente
após o rotor. Alguns autores usam uma numeração diferente, numerando a entrada do rotor
como o ponto 1 e a saída como o ponto 2. Nesta numeração um ponto imediatamente antes do
rotor recebe o número zero e um ponto imediatamente após recebe o número 3. A Figura 4.3
ilustra esta nova numeração para o rotor de uma bomba centrífuga.
Figura 4.2.: Convenções para turbinas e bombas hidráulicas
Enquanto o fluido percorre os canais formados pelas pás do rotor, este está girando com
uma determinada velocidade angular. Desta forma cada ponto do rotor possui uma velocidade
tangencial que o produto da velocidade angular pela distância do ponto ao eixo da máquina.
Como o rotor está em movimento o fluido possui uma determinada velocidade relativa em
num referencial fixo no rotor que é tangente às pás em cada ponto. Um observador no solo
veria a partícula de fluido com uma velocidade absoluta que é a soma vetorial da velocidade
relativa do fluido e da velocidade tangencial do ponto do rotor que coincide com a partícula.
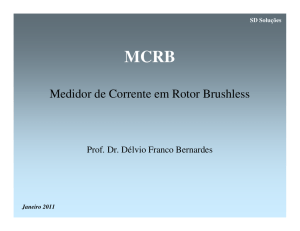
Esta soma vetorial sugere um triângulo, que é denominado de triângulo de velocidades. A
trajetória absoluta de uma partícula A-B´, vista por um observador no solo, está mostrada na
Figura 4.3
Figura 4.3. Trajetória de uma partícula de fluido e triângulos de velocidade.
Trajetória da partícula:
Arco AB' : movimento absoluto do fluido
Arco BB' : trajetória que o ponto B do rotor percorre durante o tempo t que a partícula
fluida leva para ir de A até B.
Arco AB: movimento relativo do fluido sobre o rotor.
Arestas:
de pressão - aresta de entrada em MFM ou aresta de saída em MFG
de sucção - aresta de saída em MFM ou aresta de entrada em MFG
Triângulos de Velocidade MFG:
Figura 4.4a: Triângulo de velocidades na aresta de sucção da pá
Figura 4.4b.: Triângulo de velocidades na aresta de pressão na pá
- velocidade absoluta (c): velocidade que uma partícula de fluido tem com relação a um
observador parado.
- velocidade relativa (w): velocidade vista pelo observador movendo-se com o rotor.
- velocidade tangencial (u): velocidade tangente ao eixo de rotação.
→
→
→
c = u+ w
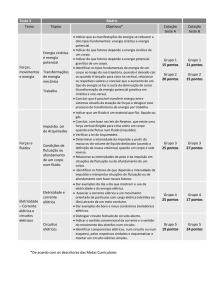
Grade:
Desenvolvimento cilíndrico do rotor mostrando o conjunto de pás.
Figura4.5. Grade de uma máquina axial
OBS: Todas estas observações valem independentemente da forma da superfície de rotação,
na qual as linhas de corrente transcorrem (superfície de fluxo), ou seja, independentemente de
ser admissão radial ou axial. A notação adotada, na qual a posição é caracterizada
independentemente da direção do fluxo, serve tanto para turbinas como para bombas.
Fator de Estrangulamento:
Representa a proporção da superfície livre para escoamento.
fe =
t − et
t
onde:
t = passo (distância entre duas pás)
et = espessura da pá na direção tangencial ao escoamento.
t=
π.D
z
onde z é o número de pás.
Entrada sem choque: Quando a direção da corrente coincide com a direção da aresta de
entrada da pá.
Entrada com choque: É o contrário. Provoca o aparecimento da componente de choque
Wch que ocasiona perdas, não pelo encontro brusco com a pá, mas sim pelo turbilhonamento
do fluido do lado oposto (saída).
4.2. Equação da Circulação
Figura 4.5. Caminho para cálculo da circulação
A circulação nada mais é do que a integral sobre uma curva fechada do produto escalar
entre a velocidade num ponto pelo elemento infinitesimal de superfície.
→
→
Γ = ∫ c .d s
4.3. Equação da Impulsão
Figura 4.6. Volume de controle para cálculo da impulsão
2° de Lei de Newton
G
G
G
G
d ∑ δ m .C
dC0 d m.C0
∑ F = m. dt = dt = dt
(
) (
onde:
G
F = somatória de foças exteriores aplicadas à massa m
∑
G
c 0 = vetor velocidade do C.G.
)
G
dc 0
= aceleração do C.G.
dt
δm = massa de um elemento infinitesimal de fluido.
→
δm. c = quantidade de movimento ou impulsão do elemento de massa δm .
→
c = vetor velocidade de δm .
Enunciado: "A variação, relativamente ao tempo, da impulsão da massa é igual a soma
vetorial das forças exteriores a ela aplicada (gravidade + superfície).
→
Designando como r o raio vetor de um ponto fixo O qualquer do espaço a um elemento
infinitesimal de massa δm qualquer, pode-se estender a lei da impulsão para os momentos:
G
δ m .c →
d
M=
.r
dt
onde ΣM é a somatória dos momentos = soma dos produtos vetoriais dos momentos
estáticos relativamente a O de todas as forças exteriores aplicadas a massa m.
Aplicação: Escoamento de um fluido num tubo.
∑
(∑ )
Fig.4.7. Tubo de corrente
Seja um fluido incompressível escoando em R.P. entre as seções 1 e 2 do tubo de
corrente, Figura 4.7.
No intervalo de tempo Δt:
- entrou a massa: ρ.S1.dS1 através de S1.
- saiu a massa: ρ.S2.dS2 através de S2.
Seja:
→
I1 = impulsão no tempo Δt através de S1.
→
I 2 = impulsão no tempo Δt através de S2.
Assim a variação da impulsão relativamente ao tempo é igual a soma vetorial de todas
as forças exteriores que no instante t atuam no volume de controle (V).
→
→
I −I
ΣF = 2 1
Δt
→
→
→
→
→
→
Σ F = G + Fp + p1.S1 + p 2 .S2
onde:
→
G = força gravitacional
→
Fp = força resultante das forças exercidas pelas paredes sobre a massa m.
→
→
p1.S1 , p 2 .S2 = forças de pressão na entrada e saída.
→
G
G
I 2 = ρ .S 2 .c 2 .Δt.c 2 = ρ .Q.Δt.c 2
→
G
G
I 1 = ρ .S1 .c1 .Δt.c1 = ρ .Q.Δt.c1
Substituindo, temos:
→
→
→
→
G
G
G + F p + p1 . S1 + p 2 . S 2 = ρ .Q.(c 2 − c1 )
Obs.: A aplicação destas equações juntamente com as equações da continuidade e de
Bernoulli, formam o instrumental elementar para o cálculo das Máquinas de Fluxo
A seguir serão apresentadas as equações fundamentais para as Máquinas de Fluxo,
considerando o fluido incompressível, escoando em Regime Permanente, isento de atrito, num
sistema com um número infinito de pás e que não haja choque na entrada.
4.4. Equação Fundamental das Máquinas de Fluxo
Considere a Figura 4.8.
Fig.4.8: Representação das superfícies de controle no rotor.
Para usar a equação da impulsão, toma-se as superfícies de controle como superfície de
rotação do rotor imediatamente antes da aresta de sucção e imediatamente após a aresta de
pressão. Admite-se fluxo unidimensional e em Regime Permanente e uniforme. As forças
normais resultantes das forças que agem nas Superfície de Controle cilíndricas, ou seja, as
pressões no fluido não criam nenhum movimento de rotação, sendo portanto desprezadas as
perdas. Aparecerá um momento de rotação devido à impulsão do fluido que passa pelas
Superfície de Controle e através de efeitos de viscosidade, ou seja, forças tangenciais.
Notação:
c 0 , c 3 : velocidade média do fluxo nas superfícies 0 e 3.
α 0 , α 3 : ângulos dos cilindros circulares nos quais situam as arestas de sucção e de
pressão nas pás ( r1 = r0 e r3 = r2 )
m = ρQ ⋅ fluxo de massa
Com esta notação, ocorrem, independentemente da direção do fluxo no interior do rotor,
as seguintes forças e momentos nos círculos das Superfícies de Controle:
Superfície de Controle1:
Força de Impulsão: I 1 = m c 0 , na direção de c0.
l 0 = r1 cos α 0
Mom.: M 0 = I 1l 0 ,
M 0 = −m c 0 r1 cos α 0 (reduz o momento transmitido)
Superfície de Controle2:
Força de Impulsão: I 3 = m c 3 (na direção oposta de c3)
l 3 = r2 cos α 3
Mom.: M 3 = I 3 l 3
M 3 = m c 3 r2 cos α 3
Assim o momento transmitido pelas pás desprezando o atrito, será:
M pa = M 3 + M 0
M pa = m ( r2 c 3 cos α 3 − r1 c 0 cos α 0 )
c 3u c 0u + ⇒ bomba
- ⇒ turbina
M pa = m ( r2 c 3u − r1 c 0u )
aumento do vórtice rc u no rotor
Assim o conjugado (momento) transmitido pelas pás fica igual ao fluxo de massa vezes
a diferença do vórtice.
A equação acima foi deduzida para bombas de acordo com a figura, mas tem validade
geral.
Denotando por ω a velocidade angular do rotor, o trabalho nas pás Ypá resulta em:
M pa ω = m Y pa
ou Y pa = ω ( r2 c 3u − r1 c 0u )
Substituindo as velocidades tangenciais do rotor nos raios r1 e r2 com u1 = r1ω e
u 2 = r2ω
Temos: Y pa = u 2 c 3u − u1 c ou Equação Fundamental para Máquinas Hidráulicas geratrizes
(bombas).
Y pa = u1 c ou − u 2 c 3u , que é a Eq. Fundamental para Máquinas Hidráulicas motrizes
(turbinas).