Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
KIT PARA LEVITAÇÃO MAGNÉTICA COM IMÃS PERMANENTES
MARCO A. EGITO COELHO
Laboratório de Robótica e Automação (LARA), Departamento de Engenharia Elétrica, Universidade de
Brasília
Dep. Engenharia Elétrica, Campus Darcy Ribeiro, Brasília-DF cep:70910-000
E-mail: [email protected]
Abstract This kit was designed for teaching in undergraduate control laboratory at Universidade de Brasília. We had many
problems with the old kits based on DC motors, tachometers and electromechanical gear, mainly due to its dead zones, backlash,
vibration and noise of brushes that jeopardized the teaching because they could not be adequately modelled with linear repres entations. The magnetic levitation kit, basically built with recyclable materials, allows to obtain good linear models for the sys tem and demonstrate clearly to the student the power of feedback, because levitation is possible only in closed loop.
Keywords Magnetic levitation, Teaching Laboratory,
Resumo Este kit foi desenvolvido para o ensino de graduação no laboratório de controle da Universidade de Brasília. Há mui to tínhamos problemas com os antigos kits baseados em motores DC, tacômetros eletromecânicos e engrenagens, principalmente
devido às suas zonas mortas, folga, vibrações e ruídos de escovas que prejudicavam o ensino pois não podiam ser adequadamen te modelados com representações lineares. O kit de levitação magnética, construído basicamente com materiais recicláveis, per mite a obtenção de bons modelos lineares para o sistema, além de mostrar claramente para o aluno o poder da realimentação,
pois a levitação só é possível em malha fechada.
Palavras-chave Levitação Magnética, Laboratório de Ensino,
1
Introdução
A importância do laboratório no ensino de engenharia já é conhecida há muitos anos. Frequentemente as descobertas são feitas primeiro nos laboratórios
para depois serem explicadas pela teoria. A motivação dos alunos em aprender a teoria cresce muito a
partir da visualização em laboratório dos sistemas
modelados na teoria, principalmente quando estes são
interessantes e intrigantes.
A levitação de um objeto através de campos
magnéticos e sem contato com partes fixas é relativamente difícil produzindo um bom desafio para os estudantes. Logo de início, o conceito de instabilidade
já fica claro pois os imãs permanentes utilizados têm
forças de atração/repulsão suficientes para a levitação, mas esta não é estável.
Outro ponto importante é a construção do kit a
partir de materiais recicláveis: sobras de madeiras,
imãs retirados de alto-falantes e componentes eletrônicos removidos de antigos equipamentos desmontados. Isto deve dar ao aluno a percepção de que ele
também pode fazer algo semelhante, enquanto que o
uso de sistemas sofisticados e de alta tecnologia tende a intimidar aquele que quiser construí-los, fazendo
dos futuros engenheiros meros compradores de equipamentos.
Este kit foi concebido para ser totalmente analógico e contínuo no tempo, portanto se adequando à
teoria básica de controle: funções de tempo contínuo,
domínio s, funções de transferência, diagramas de
blocos e espaço de estados de tempo contínuo. Os as-
ISBN: 978-85-8001-069-5
suntos específicos da área de controle cobertos com o
uso do kit incluem: desenvolvimento de funções de
transferência, diagrama de blocos, identificação de
sistemas, realimentação, linearidades e não-linearidades, estabilidade, lugar das raízes, projeto de compensadores em avanço e proporcional-derivativo
(PD).
2 Formato básico
O objetivo principal é permitir a levitação estável de um rotor através da interação entre campos
magnéticos gerados neste rotor e nas partes fixas do
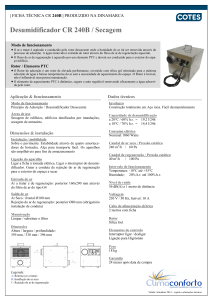
kit. Quase a totalidade da força de sustentação do rotor é consequência da interação entre os 3 imãs permanentes; imã da base, imã do rotor e imã superior.
Entretanto, como é previsto pelo teorema de
Earnshaw (1842), é impossível levitar elétrica ou
magneticamente um objeto de forma estável, apenas
com cargas elétricas fixas ou imãs permanentes.
Os 3 ímãs permanentes são feitos de ferrite cerâmica e tem formato anelar, com a magnetização no
sentido axial, isto é, pólos norte e sul nas faces do
anel. As faces correspondentes ao pólo norte foram
pintadas de branco nos 3 ímãs, para facilitar a compreensão do funcionamento e montagem do kit (ver
Figura 11). O ímã do rotor é preso a uma haste longa
(feita com um tubo de PVC) se projetando para baixo
de maneira a colocar o centro de gravidade deste bem
abaixo do ponto central do imã. O imã de base é o
maior dos 3 e seu diâmetro interno é bem maior que
o diâmetro da haste do rotor, de forma que existe
2065
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
uma folga grande (cerca de 10mm) entre rotor e imã
de base. Passando a haste do rotor pelo diâmetro interno do imã de base com as faces brancas voltadas
uma para a outra (indicadas por N N N... na Figura
1), percebemos uma força de repulsão considerável,
facilmente capaz de superar o peso do rotor. Como as
faces brancas correspondem ao polo norte dos imãs,
temos a forte repulsão. Com a parte eletrônica desligada, o rotor não fica parado (isto é, levitando espontâneamente) no centro do imã de base, uma vez que
esta posição é instável e, portanto, este rapidamente
se desloca lateralmente até tocar numa das bordas do
diâmetro interno do imã de base. A colocação de um
3º imã sobre o rotor com a face branca voltada para
baixo (portanto atraindo o rotor) cria uma 2ª força de
sustentação, que deve ser menor do que a força de repulsão do imã de base (ver Figura 1). A introdução
da 2ª força coloca o sistema mais próximo da estabilidade, porém o teorema de Earnshaw continua válido
e o sistema ainda é instável.
Imã
superior
Ft
luz
N N N N
Imã
S S rotor
N N N N
Be
N N N N
Eixo
Z
SSSS
N N N N
Eixo
X
led
N N N N N
Bd
N N N N N
Imã
base
Figura 1. Arranjo básico do levitador
3 Circuitos eletrônicos
Os circuitos eletrônicos são relativamente simples e de fácil compreensão por alunos de engenharia
elétrica ou estudantes de eletrônica de nível médio.
Utilizam componentes de uso geral e podem ser reparados sem maiores dificuldades.
3.1 Sensor de posição
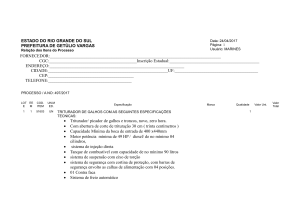
Na Figura 2 está o circuito do sensor de posição
de um dos canais. Este utiliza um fototransistor infravermelho (Ft)e um LED retirados de um antigo
mouse de esfera. O amplificador operacional tem a
função de deslocar a tensão no coletor do fototransistor para uma variação em torno de zero, além de proporcionar um ganho de +2. Os resistores R1 e R2 são
escolhidos e ajustados de tal forma que os valores
máximo e mínimo da saída Ss sejam positivos e negativos com média zero. No nosso caso, com uma
distância de 50 mm entre o LED e o fototransistor e
uma corrente de 10 mA no LED, R1= 39k + trimpot
10k, R2 = 82k. O amplificador operacional utilizado
neste circuito e nos três seguintes estão juntos em um
CI TL084. Como temos 2 canais (eixo x e eixo y) são
usados 2 destes.
+5V
R5
3.3k
R4
3.3k
+12V
R1
Ss
-12V
3.3k
R3
R2
Ft
Figura 2. Circuito sensor de posição
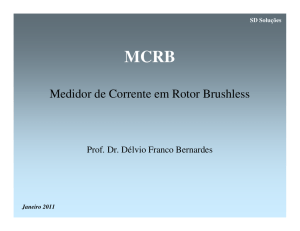
3.2 Atuador
As bobinas Be e Bd na Figura 1 correspondem
ao atuador do sistema e estão ligadas em série com as
polaridades invertidas. Desta forma, uma corrente
elétrica nas bobinas fará com que uma delas “puxe” e
a oposta “empurre” o rotor, isto é, as bobinas produzem uma força no sentido positivo ou negativo do
eixo x, conforme a corrente através delas seja positiva ou negativa. A polaridade da ligação destas bobinas ao circuito é escolhida de forma a tornar a malha
de realimentação estável.
O circuito da Figura 3 fornece uma corrente para
as bobinas proporcional ao sinal de entrada Ep e é
baseado em um único amplificador operacional numa
configuração não-inversora. A Entrada Ep vem do
circuito do compensador e a saída é ligada diretamente nas bobinas. A entrada Ep é acessível na placa
do compensador, como também o sinal Ib que será
utilizado para mostrar a corrente instantânea através
das bobinas na tela do osciloscópio. Os transistores
bipolares NPN e PNP, são de uso geral e servem para
amplificar a corrente na saída do amplificador operacional U3 (Sedra & Smith, 2004). Estes transistores
são presos a uma peça de alumínio para melhorar a
dissipação de calor, uma vez que a corrente passando
por deles pode chegar a 300 mA. Os LEDs LDe e
LDd indicam ao usuário sobre a força produzida pelo
atuador: para a direita, para a esquerda ou próxima
de zero se ambos estiverem apagados.
+12V
+12V
Ep
10k
Rp
NPN
U3
RLd
1k
PNP
-12V
Ib
Be
-12V
Bd
LDe
LDd
Rpot
1Ω
Figura 3. Circuito do atuador
ISBN: 978-85-8001-069-5
2066
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
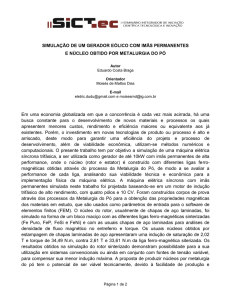
3.3 Compensador
O circuito de compensação fica imediatamente
antes do circuito do atuador e tem a função de melhorar a resposta do sistema completo. Este circuito é
implementado em uma placa menor ligada à placa
principal por um cabo multivias. Na placa do compensador pode-se escolher entre o compensador padrão, mostrado na Figura 4, ou um outro projetado
pelo usuário que pode ser implementado com ou sem
a utilização dos amplificadores operacionais disponíveis na placa.
Rca
51k
Sm
Ep
Cc
1uF
Rba
12k
Figura 4. Compensador padrão
3.4 Somador e Amplificador
Este circuito fecha a malha de realimentação,
onde um somador e um amplificador de ganho ajustável pelo usuário são incluídos na placa do compensador. A soma de sinais é feita pelos resistores Rref e
Rss onde o valor de Rref é maior para compatibilizar o nível de sinal de Ss com o sinal Ref (maior)
que vem do gerador de funções. O ganho pode ser alterado pelo usuário com a alteração dos resistores Rg
e Rr. Nas aulas práticas, normalmente fazemos Rr=0
(curto-circuito) e Rg=∞ (circuito aberto) de maneira
que o ganho é unitário. Estes resistores são alterados
apenas quando o compensador padrão é substituído.
Rg
Ref
Ss
100Ω
Rss
4.1 Equações do rotor
O desenvolvimento das equações diferenciais
que descrevem a dinâmica dos 3 eixos é parte importante da análise quantitativa exigida para alunos do
ensino superior, porém, isto pode ser substituído por
uma abordagem qualitativa no caso de alunos do ensino médio. Por falta de espaço colocaremos aqui
apenas algumas equações relativas aos eixos vertical
(eixo z) e horizontal (eixo x), escritas a partir de observações empíricas sobre as forças magnéticas que
agem entre os imãs e do uso das equações de corpo
livre do rotor (Nise, 2002).
f
+ f zoA − m.g = 0
zoB
(1)
2
d δz
+( f zoB . K zB− f zoA . K zA). δ z=0
dt 2
m
(2)
2
m
d δx
=( f zoB . K xB − f zoA . K xA ) .δ x− f rx
dt 2
(3)
onde:
δ z = deslocamento no eixo z a partir de um ponto de
equilíbrio.
Rr
+12V
Rref
2.2k
maneira a colocar o centro de gravidade deste bem
abaixo do ponto central da força magnética de sustentação. Ainda poderão ocorrer oscilações pendulares neste eixos, mas não impedirão a estabilidade geral do rotor. O equilíbrio da rotação no eixo z é indiferente devido à construção cilíndrica do rotor, restando portanto a modelagem da translação do rotor
nos 3 eixos.
δ x = deslocamento no eixo x a partir de um ponto de
equilíbrio.
Sm
-12V
m = massa do rotor.
g = aceleração da gravidade (= 9,8 m/s²).
Figura 5. Circuito somador e amplificador
fzoA = força sobre o rotor produzida pelo imã superior no eixo z no ponto de equilíbrio estático.
4 Estabilização do sistema
fzoB = força sobre o rotor produzida pelo imã base no
eixo z no ponto de equilíbrio estático.
O problema básico para o arranjo da Figura 1 é a
estabilidade lateral do rotor nos eixos x e y, pois a estabilidade vertical no eixo z é assegurada pelo jogo
de forças magnéticas entre os 3 imãs e o peso do rotor, porém, esta última será perdida se o imã superior
se aproximar muito do rotor.
Um corpo físico levitando corresponde a um sistema com 6 graus de liberdade, isto é, deslocamentos
translacionais e rotacionais nos 3 eixos. A rotação
nos eixos x e y é limitada devido à construção do rotor, com uma haste longa se projetando para baixo de
ISBN: 978-85-8001-069-5
KzA = constante de proporcionalidade da força sobre
o rotor produzida pelo imã superior no eixo z.
KzB = constante de proporcionalidade da força sobre
o rotor produzida pelo imã base no eixo z.
KxA = constante de proporcionalidade da força sobre
o rotor produzida pelo imã superior no eixo x.
KxB = constante de proporcionalidade da força sobre
o rotor produzida pelo imã base no eixo x.
2067
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
frx = força magnética de restauração no eixo x produzida pelas bobinas Be e Bd, apontando para
o lado negativo do eixo.
Devido à simetria radial do rotor e dos imãs as equações dos eixos x e y são idênticas, portanto, mencionamos apenas a equação do eixo x. Uma vez que a altura do imã superior pode ser ajustada através de parafusos, a relação entre as forças fzoA e fzoB pode ser
alterada. Observando que a equação (2) é semelhante
à de um sistema massa-mola, teremos uma solução
marginalmente estável no eixo z se fzoA .KzA <
fzoB .KzB . Isto pode ser facilmente observado no kit
quando o rotor estiver em levitação. Se a parte eletrônica for desligada, observa-se uma instabilidade nos
eixos horizontais (x e y) o que pode ser explicado
pelo teorema de Earnshaw (1842), pois a estabilidade
em um eixo, mesmo que marginal, implica em instabilidade pelo menos um outro eixo. Isto pode ser usado para provar a igualdade entre as constantes dos eixos x e z no ponto crítico onde fzoA = fzoB , portanto, é
razoável supor que isto é aproximadamente verdadeiro nas proximidades deste ponto para as 4 constantes
K descritas acima. O ponto de equilíbrio usado no kit
deve ser tal que fzoA < fzoB , porém próximo do ponto
crítico, de forma a permitir estabilidade vertical e instabilidade horizontal, ao mesmo tempo em que as
“constantes de mola” (coeficientes de δx e δz) são
pequenas para facilitar a estabilização.
A função de transferência para o eixo x é obtida
com a aplicação da transformada de Laplace à equação (3), teremos então:
1/ k r
X (s)
=
2
F x ( s)
s
1− 2
ωr
(4)
k r = f zoB . K B− f zoA . K A
(5)
√ ( k r / m)
(6)
onde utilizou-se o fato de que KzA= KxA = KA e KzB=
KxB = KB. O parâmetro ωr é a frequência angular de
oscilação vertical do rotor, como pode ser verificado
pela solução da equação diferencial (2).
A função de transferência em (4) tem 2 polos reais iguais a ± ωr , portanto coincidentes com a frequência de oscilação vertical do rotor, fato explicado
pela semelhança entre as equações (2) e (3). Isto
pode ser confirmado experimentalmente com o uso
de técnicas apropriadas de identificação de funções
de transferência.
ISBN: 978-85-8001-069-5
O circuito do sensor (Figura 2) tem como modelo apenas uma constante (-Ks) pois os efeitos dinâmicos são desprezíveis nas frequências de interesse, isto
é, abaixo de 30 Hz. O sinal negativo indica que o sinal de saída Ss fica negativo quanto a entrada x é positiva.
O circuito do atuador (Figura 3) também é modelado por uma constante (1/Rpot), embora as indutâncias das bobinas possam sugerir algum efeito dinâmico. Cada uma das bobinas é feita com 1000 espiras
de fio AWG#29 e enrolada em torno de um parafuso
de aço de 60mm de comprimento. Os testes práticos
mostraram que para frequências de até 150 Hz o circuito funciona satisfatoriamente como driver de corrente e com efeitos dinâmicos desprezíveis.
O circuito somador e amplificador (Figura 5) é
um clássico amplificador não-inversor onde a entrada
é duplicada com um dos sinais (Ref) fortemente atenuado. A representação de ganho deste circuito está
mostrada no diagrama de blocos (Figura 6).
A constante Kif corresponde à transdução entre
corrente elétrica e força lateral sobre o rotor. Ela
pode ser positiva ou negativa conforme a polaridade
escolhida para a ligação das bobinas. O cálculo desta
constante é complexo uma vez que depende de fatores como a magnetização dos imãs e disposição geométrica precisa dos componentes magnéticos, por
isto, é recomendável utilizar técnicas de identificação
em diagramas de blocos para a sua estimação.
4.3 Compensação
onde kr e ωr são definidos como:
ωr =
4.2 Demais componentes
Um dos pontos interessantes do uso deste kit é a
relativa dificuldade para se obter um equilíbrio estável do rotor, o que desafia o aluno e o obriga a se
aprofundar na análise a fim de obter um resultado satisfatório. Se o sinal do sensor de posição do rotor
(Ss) for realimentado diretamente para o amplificador das bobinas (Ep), não conseguiremos chegar a
um equilíbrio estável, exatamente como é previsto
pela teoria. Devido aos dois pólos reais e simétricos
do rotor, o lugar das raízes do sistema de malha fechada neste caso apresenta um ponto de partida sobre a origem (0+j0) e os dois ramos complexos correm sobre o eixo jω, o que significa que os polos de
malha fechada jamais estarão simultaneamente no semiplano real negativo (Nise, 2002). Então é necessário projetar um compensador para estabilizar o sistema, tarefa que pode não ser muito simples para os
iniciantes. Para estes casos existe um compensador
padrão incluído (Figura 4) que é bastante simples,
mas permite obter uma levitação razoavelmente estável do rotor. O formato é conhecido como compensador em avanço e tem uma função de transferência
dada por:
2068
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
G(s )=K c .
1−s / z c
1−s / p c
(7)
onde K c , z c e p c são parâmetros reais e
correspondem a um ganho DC, um zero e um polo no
caminho direto (malha aberta). O compensador padrão tem os mesmos valores de resistores e capacitor
para todos os kits.
Os componentes de cada kit são diferentes, especialmente os imãs, LEDs e fototransistores, daí cada
kit tem seus próprios parâmetros. Então o compensador padrão dificilmente será o melhor possível, portanto, o usuário terá a tarefa de projetar e testar um
bom compensador para o seu kit em particular. Isto é
trabalho para os alunos já familiarizados com a teoria, que o farão depois de medir ou avaliar todos os
parâmetros do modelo, isto é, deve-se obter um diagrama de blocos razoavelmente acurado.
4.4 Diagrama de Blocos
O diagrama de blocos mostrado na Figura 6 reúne os modelos de cada parte do kit e também esquematiza o fluxo de sinais de interesse do ponto de vista de controle. O parametro ωr pode ser medido quando o rotor estiver levitando com o compensador padrão (cronometrando o tempo de 10 oscilações verticais, ωr = 20π/T10). Com o uso da expressão (6) e a
massa m do rotor, kr também pode ser obtido. O parâmetro Ks pode ser estimado como o quociente entre o
diâmetro da janela do fototransistor Ft e a excursão
máxima do sinal Ss. Com o rotor levitando e a aplicando um sinal senoidal de frequência conhecida em
Ref, é possível comparar a amplitude da senóide em
Id e Ss, obtendo então o valor do parâmetro Kif. Todos os outros parâmetros são fixos e conhecidos, portanto o aluno tem dados suficientes para traçar o lugar das raízes do sistema de malha fechada e projetar
um bom compensador para o levitador.
5 O Sistema Prático
Um total de 10 kits de levitação magnética foram
feitos para as aulas práticas de Controle Dinâmico na
Ref
Rss
Rref
Ep
Sm
+
+
Ss
Rr+Rg
Rg
Som. Ampl.
G(s)
Comp.
Figura 6. Diagrama de blocos em um dos canais.
ISBN: 978-85-8001-069-5
Universidade de Brasília, todos a partir de um conceito de sustentabilidade, isto é, usando materiais recicláveis na maior parte dos componentes.
As Figuras 7, 8, 9 e 10 obtidas em um dos kits
levitando com o compensador padrão, mostram que o
funcionamento é bem razoável e os sinais são de boa
qualidade, isto é, com pouca interferência de ruídos e
boa repetibilidade.
Uma das dificuldades experimentais é a alta sensibilidade do sistema à vibrações mecânicas, portanto, deve-se evitar de tocar na bancada com o rotor levitando para a obtenção de bons sinais no osciloscópio. Os sinais dos sensores de posição dos canais x e
y (Ssx e Ssy) são afetados também por oscilações
em outros graus de liberdade, isto é, Ssx é função
não apenas da translação no eixo x mas também de
movimentos pendulares (rotação) no eixo y, translação no eixo z (devido à diposição levemente inclinada entre o LED e Ft) e mesmo rotação no eixo z devido às imperfeições do rotor. Os sinais das Figuras 8,
9 e 10 foram obtidos apoiando levemente a ponta inferior da haste do rotor sobre uma pequena peça cerâmica (Figura 13), de modo a cessar com as possíveis
oscilações nos outros graus de liberdade do rotor. A
utilização deste artifício não causa alterações perceptíveis na dinâmica horizontal do sistema ou translação no eixo x. Mesmo sem este apoio (rotor levitando
totalmente, Figura 7 e 12) é possível obter sinais razoavelmente bons, embora isto possa ser demorado,
pois é preciso esperar vários ciclos até que as outras
oscilações amorteçam (em alguns kits a duração da
aula pode ser insuficiente).
Os componentes mais críticos para a linearidade
do sistema com um todo são os sensores óticos que
detectam a posição horizontal do rotor, porém, a simetria dos sinais das Figuras 8, 9 e 10 mostram que
esta é relativamente pequena. Nestas figuras, utilizou-se um sinal Ref relativamente grande em amplitude para forçar o aparecimento de alterações visíveis, como achatamentos do sinal Ss nos semi-ciclos
positivos ou negativos, mas ainda assim é difícil perceber as alterações.
As bobinas Be e Bd são enroladas em torno de
um parafuso de aço o que poderia, em princípio, causar problemas de histerese no atuador, porém esta
não pôde ser percebida nas medições feitas.
1
i
Rpot
Kif
Driver
Bob.
Sensor
fr
1/k
x,y
r
1 − s² / ωr²
Rotor
-Ks
2069
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
A Figura 10 mostra uma medição utilizada durante a identificação do sistema. Os sinais Ss (Figura
2) e Ib (Figura 3) são os únicos visualizáveis diretamente no osciloscópio relativos aos blocos “Bob.”,
“Rotor” e “Sensor” no diagrama de blocos (Figura 6).
A aplicação de um sinal senoidal em Ref força o
aparecimento de senoides com a mesma frequência
naqueles sinais, isto é, estaremos em regime permanente senoidal. Então, do diagrama de blocos com s=
jω deduzimos que:
Ss ( j ω)
=
Ib( j ω)
−K if K s
kr
2
1+ ω 2
ωr
=
K
2
1+ ω 2
ωr
(8)
Portanto, a relação entre as amplitudes dos 2 sinais deve ser um número real e a medição deste valor
pode ser utilizada para calcular o valor de parâmetros
desconhecidos, e.g., Kif como sugerido no item 4.4.
A expressão (8) também pode ser usada como uma
outra maneira de obtenção do parâmetro ωr , servindo
como validação das medições e modelos desenvolvidos. Para a determinação simultânea de K e ωr em (8)
deve-se utilizar pelo menos 2 frequências diferentes
para a formação de um sistema de 2 equações com 2
incógnitas. Nas aulas práticas tentamos medir a relação entre as amplitudes de Ss e Ib em 5 frequências
diferentes com o maior afastamento possível entre 2
vizinhas, para então fazer uma média entre as melhores medidas.
Figura 8. Sinais Ss (acima) e Ref (abaixo) obtidos em um dos kits
com um osciloscópio digital, com apoio cerâmico
Figura 9. Sinais Ss (acima) e Ref(abaixo) obtidos em um dos kits
com um osciloscópio digital, com apoio cerâmico
Figura 10. Sinais Ss (acima) e Ib (abaixo) obtidos em um dos kits
com um osciloscópio digital, com apoio cerâmico
Figura 7. Sinais Ss (acima) e Ref (abaixo) obtidos em um dos kits
com um osciloscópio digital, sem apoio
Conclusão
Com a utilização dos kits de levitação magnética
é possível cobrir quase todos os assuntos básicos exigidos em cursos introdutórios de controle dinâmico
em nível de graduação e mesmo alguns tópicos em
nível de pós-graduação. O projeto do kit foi todo feito utilizando eletrônica analógica e amplificadores
operacionais para facilitar a compreensão por alunos
ISBN: 978-85-8001-069-5
2070
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
iniciantes em eletrônica. Apenas os drivers de corrente das bobinas fazem uso de transistores discretos
para evitar o uso de amplificadores operacionais de
potência, que não são muito usuais. Atenção especial
deve ser dada ao fato de não existir zona morta e nem
histerese nas proximidades do ponto de equilíbrio,
problema comum com os motores e engrenagens dos
kits tradicionais de controle de posição. Novas
versões do kit permitirão seu uso também em controle digital apenas substituindo a placa de compensadores por uma outra equipada com microcontroladores.
Um dos principais benefícios observados com 3
semestres de utilização dos kits é o despertar da curiosidade dos alunos. Mesmo os menos aplicados (com
menores notas) se esforçam para não perder as aulas
de laboratório. As primeiras versões do kit não eram
muito fáceis de ajustar, às vezes era necessário utilizar as 2 horas de aula para conseguir imagens como
as das Figuras 8, 9 e 10. Mesmo assim os alunos não
desanimavam e se empenhavam muito para obter
bons resultados. Não menos importante é a percepção
de que eles também podem fazer seus trabalhos finais
de graduação na área de controle e projetar um sistema inteiro de controle sem depender de componentes
caros e difíceis de conseguir. Eles também viram que
a teoria descreve razoavelmente bem o que foi observado em laboratório, isto é, a teoria funciona!
Figura 12. Fotografia do kit levitando sem apoio cerâmico
Referências Bibliográficas
Earnshaw, Samuel (1842). "On the Nature of the Molecular Forces which Regulate the Constitution
of the Luminiferous Ether". Trans. Camb. Phil.
Soc. 7: 97–112.
Nise, N. S. (2002) Engenharia de Sistemas de Controle. 3ª ed. Rio de Janeiro: LTC – Livros Técnicos e Científicos S. A.
Sedra, A; Smith, K. C. (2004) Microeletrônica. 4ª
Ed, Pearson, São Paulo.
Figura 13. Fotografia do kit levitando com apoio cerâmico
Figura 11. Fotografia do kit desmontado
ISBN: 978-85-8001-069-5
2071