Paulo Vargas Moniz
Lição 12
A Massa e Momento Linear Relativista
Estrutura Pedagógica
Apresentação:
O objectivo geral desta lição (e das 3 seguintes) é analisar e determinar quais (e
como são) as alterações induzidas pela estrutura da TRR no contexto de fenómenos
dinâmicos. Em particular, nesta lição vamos determinar como o conceito de massa
e momento linear adquirem um novo enquadramento fundamental.
Mais concretamente, ao aplicar directamente o conceito de momento linear
extraido da mecânica Newtoniana, vamos constatar que a conservação de momento
linear seria inconsistente com a TRR. A solução deste problema requere a
introdução do conceito de massa (e momento linear) relativista, dependente da
velocidade do objecto. A consequência relevante é que recuperamos a conservação
do momento linear se outra lei de conservação (clarificada na Lição 13) também
fôr introduzida.
Questão Central:
O resumo acima descrito aponta para as questões centrais que vão guiar esta lição.
Básicamente, inquirir se e como os postulados de A. Einstein da TRR (via
transformações de Lorentz) também determinam consequencias ao nivel da
dinâmica. Em particular, ao longo das Lições 5-11 determinamos como
quantidades cinemáticas (como a velocidade e aceleração) se relacionam de forma
especifica no quadro da TRR. Mas esses observáveis estão presentes em relações
dinâmicas. Será então que para preservar essas relações dinâmicas deveremos
introduzir alterações ao nivel dos conceitos de massa e conservação de momento
linear?
Estrutura da Lição:
A estrutura desta lição é essencialmente mista. A direcção inicial é de um
“problema centralizado”, onde a conservação do momento linear em TRR é
apresentada.. Mais concretamente, a análise no quadro da mecânica Newtoniana e
TRR é discutida. Com base na introdução do conceito relativista de massa (e
momento linear), extraiem-se então “sequencialmente” várias conclusões,
introduzindo o tema da lição seguinte.
Sumário da lição:
Nesta lição irá ser focado:
122
A Teoria da Relatividade Restrita em 20 Lições
Como a conservação de momento linear (Newtoniano) não é compativel com a
TRR.
Como a conservação de momento linear requere redefinição de massa (ou momento
linear) em TRR;
Definição de massa em repouso e massa relativista (ou total);
Como com a conservação de momento linear vem associada outra lei de
conservação!
Aplicações na forma de exercicios discutidos para reforçar análises anteriores;
Porque a velocidade da luz é uma velocidade limite mas o momento linear pode
aumentar infinitamente;
Como o conceito de força em TRR irá requerer um contexto mais especifico
dado que em TRR teremos m = m (V).
Objectivos Didácticos:
No fim desta lição, ao alunos deverá ser possivel
Entender o porquê da (re)definição de momento linear e massa em TRR;
Poder interpretar o conceito de massa em repouso e massa relativista;
Saber explicar como duas leis de conservação são requeridas em TRR quando
discutindo o momento linear de objectos em interacção;
Determinar o limite não relativista (V<<c) do momento linear e massa;
E consequentemente, saber analisar alguns elementos básicos envolvidos em
colisões através da conservação de momento linear em TRR.
N
a lição 4 enunciámos o Principio da Relatividade inserido nos postulados de A.
Einstein, os quais constituiem os pilares fundamentais da TRR. Nesse contexto,
estabelecemos como coordenadas espacio-temporais e velocidades se transformam e
relacionam entre RI. Em particular, analisámos como noções de espaço e tempo se
tornam relativas (e deixam de ser absolutas). Consequências fundamentais desse facto
são as contracções de comprimentos e dilatação do tempo (ver Lições 7 e 8), nas quais
se aponta para diferenças cruciais entre mecânica Newtoniana e da TRR.
O passo seguinte após termos analisado em grande detalhe variadissimos aspectos da
cinemática associados com a TRR, é determinar quais as alterações relativistas
correspondentes a introduzir no respeitante à dinâmica. Em particular:
123
Paulo Vargas Moniz
Será que principios básicos da mecânica Newtoniana como a conservação do
momento linear (que é consequencia directa das simetrias do espaço com respeito
a translações) é afectado em TRR?
Será que a conservação da energia (consequência directa de propriedades de
simetria de sistemas fisicos com respeito ao tempo) se mantem ou tem que ser
alterada?
Que novos enquadramentos poderão ser necessários para conceitos fundamentais
(como massa) e derivados (como momento linear) presentes em dinâmica?
C
omecemos por demonstrar que a lei de conservação de momento linear (extraida
directamente da mecânica Newtoniana) não é covariante em TRR. Consideremos
a colisão de 2 objectos A e B, com massas e velocidades mA, VA, mB, VB
respectivamente, efectuada ao longo do eixo dos xx de um RI S. A conservação de
momento linear determina que
m AV A mBVB mCVC mDVD
(1.60)
indicando que no final emergem outros 2 corpos C e D como descrito em (1.60). Para
um RI S’ que se mova com velovidade u relativamente a S, obtemos das
transformações de Galileu (1.16) que (assumindo que mA=m’A)
m AV A mBVB mCVC mDVD umC m D m A mB
(1.61)
onde V’A, V’B, V’C, V’D são as velocidades de A, B, C, D em S’. A conservação do
momento linear é covariante se a massa for conservada, i.e., mA+mB=mC+mD, o que é
um principio básico da mecânica Newtoniana.
Em TRR, há que usar ao invés as transformações de velocidades (1.41-1.42) ditadas
pelas transformações de Lorentz. Mas então obtemos, diferentemente de (1.61), que
mA
V u
V A u
V u
V u
mB B
mC C
mD D
u
u
u
u
1 V A 2
1 VB 2
1 VC 2
1 VD 2
c
c
c
c
(1.62)
Para que houvesse covariância em TRR, a expressão (1.62) teria que ter a forma
mAV’A+ mBV’B= mCV’C+ mDV’D. No entanto isso não é possivel!
Qual é então o problema? Por outras palavras, se usarmos a definição Newtoniana de
momento linear junto com a transformação de Lorentz então não há conservação de
momento linear em S', embora o haja em S - contradição com o Principio da
Relatividade que estabelece que leis fundamentais da fisica tem que ser independente
do RI (covariância). Temos então duas possibilidades:
A conservação do momento linear não é uma lei da natureza mas apenas
aproximadamente válida quando V<<c;
124
A Teoria da Relatividade Restrita em 20 Lições
Conservação do momento linear é uma lei da natureza mas a definição de
momento linear em TRR não pode ser constrangido ao produto de massa
(invariante!) pela velocidade – esta seria a forma para o caso limite V/c<<1.
A primeira alternativa apresenta consequências desagradáveis. Em Física, as
quantidades dinâmicas mais importantes são aquelas que se conservam durante
interacções. E o Principio da Relatividade requer que as leis da Física sejam as
mesmas em todos os RI, pelo que leis válidas num RI devem sê-lo noutro RI qualquer.
A opção é pois procurar uma alternativa1 e estabelecer um novo conceito de massa no
quadro da TRR.
A
Solução, de forma a manter a conservação de momento linear como
caracteristica fundamental também da TRR, passa por analisar em detalhe o que
deve ser alterado na perspectiva Newtoniana. Neste sentido, o que temos que fazer é
redefinir o conceito de massa inercial. Como iremos provar para o caso acima, o
momento linear é conservado se
m m0
1
V2
1 2
c
m0
(1.64)
onde m0 é massa em repouso ou massa própria, i.e., massa do corpo no referencial em
que corpo está em repouso, i.e., comóvel. Neste novo contexto, m0 corresponde à
massa inercial definida e medida no limite V<<c da mecânica Newtoniana. A
quantidade ou observavel m é designada de massa relativista. No contexto depois
introduzido na Lição 13, veremos que m adquire uma interpretação mais clara e
transmitirá o contexto fisico adequado a (1.62) e (1.64)2. Mas não há inconveniente
em invocar uma massa dependente da velocidade, como aliás o próprio A. Einstein
assim fez. Essencialmente, é uma questão de convenção e designação.
Comentário: Também podiamos relembrar que em TRR o espaço e o tempo são agora
equivalentes. O movimento de um objecto faz-se no espaço e no tempo, e seremos mais
especificos a este propósito nas Lições 16 e 17.
Neste contexto, notemos que a definição de momento linear inclui um quociente entre
distância espacial dx de eventos e o intervalo de tempo dt que os separa: px=m0dx/dt. Mas
esses intervalos dependem do RI usado. Uma opção mais adequada é usar uma definição de
1
É curioso referir que uma lei covariante não é necessáriamente uma lei da natureza. I.e., podemos
construir relações entre observaveis que são relações covariantes mas essas leis podem não existir na
natureza. É um artefacto matemático. Mas por vezes (e segundo a linha de pensamento de A. Einstein)
leis covariantes e “estéticamente” consistentes são leis da natureza. No entanto, só a experiência pode
validar se uma relação covariante é verdadeiramente um lei da natureza.
2
A quantidade presente na eq. (1.64) depende da velocidade do objecto V na mesma forma em que a
velocidade relativa u (de dois RI) está presente na expressão (1.38). No entanto, estas quantidades
associadas com o factor são quantidades diferentes no seu contexto.
125
Paulo Vargas Moniz
tempo determinado por relógios co-movendo-se com o objecto e independente do referencial
– o tempo próprio .
Assim poderiamos escrever p x m0
dx m0Vx
d
V2
1 2
c
para exprimir o momento linear
nesse RI em termos da velocidade determinada nesse RI.
Comecemos por determinar como a quantidade 1 1 V 2 c 2 se transforma com
respeito às transformações de Lorentz, relativamente a dois RI com velocidade
relativa u ue x . V2 é o quadrado da velocidade total da particula ou objecto registado
no RI S. Em S’ tem-se que
V 2 Vx 2 Vy 2 Vz 2
e usando a transformação de velocidades (1.41-1.42) escrevemos
V 2
Vx u 2 1 u 2
c 2 V y2 1 u 2 c 2 V y2
1 u V
V u 1 u
1 u V
2
x
2
x
x
c2
c 2 V 2 V x2
c2
de onde se obtem que
V x u V 2 V x u 2
2 2 1 2
c c
c c c
1
2
u
1
V
x
c2
u 2 V 2
1 2 1 2
c
c
2
u
1 V x 2
c
2
1
1
V
c2
2
u 2 V 2 V 2u 2
4
c2 c2
c
2
u
1 V x 2
c
isto é,
1
V
c2
2
u2
V2
1
c2
c2
u
1 Vx 2
c
1
ou seja
V V u 1 V x
u
c2
(1.65)
126
A Teoria da Relatividade Restrita em 20 Lições
A relação inversa, repetindo os argumentos acima seguidos, é dada por
V V u 1 V x
u
c2
(1.66)
Das equações (1.41), (1.42) e (1.65), (1.66) igualmente se obtem que
Vx V u V Vx u
(1.67)
Vx V u V Vx u
V y V V V y
Vz V V Vz
(1.68)
e
Como se pode constatar, embora Vy e Vz tenham propriedades de transformação algo
complexa em TRR, os produtos (V)Vy e (V)Vz são invariantes!
V
erifiquemos então se com a redefinição de massa através da equação (1.64) a
conservação de momento linear relativista se mantem, sendo que este agora é
escrito como
p mV
m0
V2
1 2
c
V
(1.69)
Consideremos o processo de colisão como descrito atrás mas utilizando (1.64), (1.65).
Note-se que esta análise é facilmente generalizada a qualquer outra colisão ocorrendo
em direcções arbitrárias no RI S com coordenadas espaciais (x,y,z). Nessa situação
teriamos que lidar com 3 equações por cada 1 a seguir indicada. No entanto ainda
poderiamos empregar a vantagem que (V)Vz é invariente, determinando que as
componentes do momento linear transversais à direcção de u são invariantes, i.e.,
também se conservam em S como em S’. No caso que temos vindo a analisar, temos
que em S’
V A m0 AV A VB m0 BVB VC m0CVC VD m0 DVD
onde m0A, m0B, m0C, m0D representam as massas de A,B,C,D como determinadas em
repouso (e invariantes entre RI). Usando as transformações de velocidades relativistas
(1.41), (1.42) vem que a expressão acima toma a forma
u m0 A V A V A u u m0 B VB VB u
u m0C VC VC u u m0 D VD VD u
127
Paulo Vargas Moniz
de onde se reduz a
V A m0 AV A VB m0 BVB
VC m0CVC VD m0 DVD
u V A m0 A VB m0 B VC m0C VD m0 D
pelo que a conservação de momento linear só se processa se
V A m0 A VB m0 B VC m0C VD m0 D
(1.70)
isto é, se a massa3 relativista total se conservar também. A equação (1.70) é uma
condição complementar que determina que m0 tem que ser conservada em S. Mas
como a designação de S ou S’ é arbitrária, esta condição relativista tem que ser
satisfeita em S’. I.e., é independente do RI como se pretende.
Assim, o que transparece desta análise é que a conservação de momento linear
(px,py,pz) é consistente com a TRR apenas se outra quantidade – (V)m0 – também for
conservada no processo. A lei de conservação do momento linear em TRR diz-nos
que além das suas componentes espaciais, outra quantidade é conservada no
processo. Essa quantidade é a massa relativista à qual se associará outra interpretação.
Por outras palavras, a TRR fornece duas leis de conservação fundamentais pelo preço
de uma.
T
omemos, como aplicação detalhada do que expusemos, um processo de colisão
elástica no contexto Newtoniano (i.e., com conservação de momento linear e
energia cinética) como representado na figura junta, entre 2 partículas idênticas, A e B,
e determinemos os respectivos momentos lineares.
3
Em mecânica Newtoniana, a conservação de massa (de repouso no contento da TRR) é uma
imposição a priori. Mas em TRR, não é a soma das massas em repouso que constitui uma condição
necessária, é antes a soma de m0. Na lição 13 veremos em maior profundidade o que a conservação de
massa relativista realmente constitui – a conservação de energia relativista é adjudicada à conservação
das componentes espaciais do momento linear (e vice-versa).
128
A Teoria da Relatividade Restrita em 20 Lições
No RI S, a particula A tem velocidade com magnitude inicial vi e final vf, e a particula
B tem velocidade com magnitude inicial wi e final wf, tal que inicialmente as suas
componentes satisfazem
vix wix
; viy wiy
e no fim da colisão
v fx vix ; v fy viy ; w fx wix ; w fy wiy
Como mA = mB=m0 (i.e., a particula A é identica a B), tem-se que então
pixA pixB p fxA p Bfx
piyA piyB p fyA p Bf y
onde p ixA m0 vix é o momento linear de A no eixo dos xx, e similarmente para os
restantes. O momento linear é pois conservado na colisão. A particula A tem uma
variação de momento linear de
e para B temos
| p A | 2m0 v f y
B
| p | 2m0 w f y 2m0 v fy .
Consideremos agora uma transformação para um RI S', que se mova relativamente a S
com velocidade u = vix=-wix. De acordo com transformações de Galileo (1.12), (1.13),
vem então que em termos da perspectiva Newtoniana
Em S' a particula A não tem componente de velocidade no eixo dos xx,
Também se tem (como esperado) pA p A e pB pB pA dado que as
componentes em yy das velocidades não são afectadas.
129
Paulo Vargas Moniz
Analisemos este caso mas no enquadramento relativista ainda incompleto. I.e.,
utilizando apenas as transformações de Lorentz para relacionar S e S'. Só que as
transformações de Lorentz agoram afectam as componentes em yy e xx de v e w . Em
S' tem se, com u c e 1 1 2
vix 0
viy viy 1 2
1
wix 2 wix 1 2
1
wiy wiy 1 2
v fx 0
v fy v fy 1 2
wfx 2 w fx 1 2
1
1
1
wfy wiy 1 2
1
e para viy = - wiy tem-se que
1 2
viy wiy
1 2
e também que
1 2
v fy wfy
1 2
Da definição Newtoniana
p m0 v vem que
| p B | 2m0 wfy
1 2
| p A | 2m0 v fy 2m0 w fy
2
1
I.e., pA pB 0 ! A solução está ne redefinição da massa e momento linear
relativista. Para esta caso especifico de aplicação que estamos a analisar, constata-se
como esperado que a expressão correspondente a (1.60) para a componente em yy de
momento linear de A é invariante, i.e., o mesmo em S e S' e similarmente para B.
Indiquemos como.
130
A Teoria da Relatividade Restrita em 20 Lições
No RI S a massa da particula A que se
desloca com velocidade v relativamente a
observador em repouso é
Comentário: Convem realçar que estamos
a lidar com uma situação particular de
colisão e que algumas as afirmações
acima se traduzem nesse facto (como
verificar que componentes do momento
linear de A serão invariante, e.g). Tal tem
a ver com a invariancia de (Vy)Vy quando
a velocidade relativa dos RI se processa
no eixo dos xx, transversalmente. No
entanto a expressão (1.64) tem validade
geral.
m0
mA m0
1
v2
c2
onde v 2 vx2 v y2 , pelo que
pA mAv
m0v
2
1
v
c2
m0v
No RI S então vem
pyA mA v y
m0v y
1
v2
c2
Mas no RI S' vem que
py A mAv y
mAv y
u2
1 2
c
onde se utilizou a transformação de velocidades de Lorentz (1.41a) com u = vx, tal
como
mA
m0
1
com
v2
c2
m0
v y 2
1 2
c
v A v y dado que v Ax 0 .Usando a referida transformação de velocidade em
TRR com u = vx , i.e,
u2
vy
c2
v y
v u
v u
1 x2 1 x2
c
c
vy 1
temos que
131
Paulo Vargas Moniz
v y
u2
1
1
c2
c2
2
1
1
vy
c2 u2
1
c2
c2
2
1
2
vy
c2
v2
1 2
c u v
c
u2
c2 u 2
1 2
c
2
2
2
y
Substituindo em p´Ay e m´A vem por fim que
m0
py
A
2
1
v
c2
u2
1 2
c
vy
2
1
u
c2
m0v y
2
1
v
c2
pyA
I.e., se momento linear é redefinido como
p mv m0 v
então a componente do momento linear em yy (neste caso) é invariante com respeito
às transformações de Lorentz. E consequentemente, se há conservação de momento
linear em S também há em S'. Igualmente se prova que a componente em yy de
momento de B é a mesma em S e S'. Conforme temos referido, o caso de aplicação
acima analisado é especifico. Por isso é importante referir uma vez nais que em
situações mais gerais o que se verifica é que para preservar conservação de momento
linear entre RI no quadro da TRR, então é necessário introduzir os novos conceitos
relativistas presentes nas equações (1.64), (1.65) assim como a sua conservação
mútua.
I
mporta extrair todas as consequências possiveis da TRR no contexto das expressões
(1.64), (1.65). Por isso convem referir que a fórmula correspondente na mecânica
Newtoniana para o momento linear é p m0v . Esta é consistentemente recuperada
no limite Newtoniano v<<c, pois que (1.64) e (1.65) reduzem-se ao caso Newtoniano,
utilizando a expansão
v2
1 2
c
12
1 v2 3 v4
1
...
2 c2 8 c4
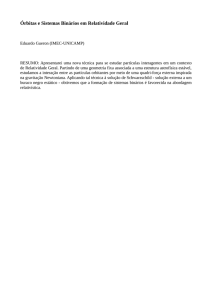
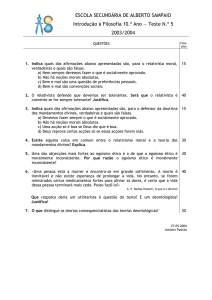
desprezando termos quadráticos (e superiores). Verifique-se igualmente como m/m0
varia com v/c na figura junta.
132
A Teoria da Relatividade Restrita em 20 Lições
Em (1.65) m0 é invariante (para transformações)
de Lorentz. I.e., é um escalar e por isso poder-seia dizer que não há necessidade de a identificar
como massa em repouso. Abstraindo-nos das
linhas de interpretação para m e m0, o aspecto
importante é que a massa de particula (m0) não
aumenta com velocidade mas é o momento linear
(via m) vai para infinito com v c .
E
como é que este novo contexto para m e p poderá afectar o conceito de força?
Nas lições 13 e 14 teremos oportunidade de apresentar consequências
importantes. Nesta lição, recordemos que a equação definindo a força em TRR é
dp
F
dt
mas é preciso atender a que
d mv
d v
F
m0
dt
dt
u2
1 2
c
(1.69a)
Uma breve análise a (1.69a) permite antever que
Haverá componentes espaciais da força e da aceleração que poderão não ser
colineares, i.e., não satisfazendo F ma
Em mecânica Newtoniana, a aplicação de uma força constante resulta em
aceleração constante; Assim a velocidade constantemente aumenta, podendo
ultrapassar a velocidade da luz.
Em dinâmica relativista, é o momento que aumenta com taxa constante, mas
considerando v c , é a massa relativista que aumenta sem limite e não a
velocidade: o valor de c é a velocidade limite em qualquer RI.
Na lição seguinte prosseguiremos a extração de consequências de TRR referentes à
dinâmica, em particular no tocante à (re)definição das relações entre observáveis
como a força, massa e momento linear expressas em (1.64), (1.65), (1.69) e (1.69a).
133