
PRINCÍPIO DE FUNCIONAMENTO E ACIONAMENTO DO MOTOR A
RELUTÂNCIA VARIÁVEL
Celso Ferreira Carvalho, Mauro Henrique Alves Signorelli
Faculdade de Engenharia Elétrica – Laboratório de Acionamentos Elétricos: Universidade Federal de Uberlândia
CEP 38408-08108, C.P.593, Uberlândia - M G
Brasil
[email protected], [email protected]
Resumo - O objetivo deste trabalho é apresentar de
uma maneira simples e objetiva o princípio de
funcionamento de um motor a relutância variável (MRV)
e sua forma de acionamento.
Será feito o
equacionamento do conjugado do motor para uma
melhor compreensão do seu princípio de funcionamento.
Palavras-Chave – acionamento de motores, conjugado,
motor a relutância variável.
PRINCIPLE OF OPERATION AND
DRIVING OF SWITCHED RELUCTANCE
MOTORS
Abstract – This paper presents in a simple and
objective way the principle of operation and driving
characteristics of the Switched Reluctance Motors
(SRM). SRMs are rapidly becoming an alternative for
applications that require variable speeds and high
starting torque.
They are very robust, nearly
maintenance free and operate at rather high efficiency.
Some relevant equations are presented in the text in
order to highlight the principle of operation.
computacionais adequadas. Assim, seu uso foi difundido
apenas nas últimas décadas graças aos avanços da eletrônica.
Apesar de algumas limitações, os MRV´s têm muitas
vantagens em relação a outros tipos de motores. Até a
potência de 150KW eles apresentam bom rendimento, boa
densidade de potência, baixa inércia, baixo custo de
fabricação, confiabilidade e tolerância a falhas, podendo
operar com a perda de uma das fases.
Em alguns países, estes motores já são fabricados em
escala industrial, sendo empregados em aplicações que
demandam acionamento com velocidade variável, operação
em alta velocidade, tração com alto conjugado, controle de
posição, etc. São utilizados nos mais diversos setores, como
por exemplo: veículos elétricos, empilhadeiras, compressores
de ar, bombas, maquinaria têxtil, acessórios automotivos,
máquinas de limpeza e eletrodomésticos.
I.2 Justificativas e Objetivos do Trabalho
I. INTRODUÇÃO
Com crescente interesse por parte da comunidade
científica, novos estudos sobre o motor a relutância variável
não param de surgir. Inúmeras publicações abordam desde o
projeto do motor (incluindo geometria, número de pólos,
material construtivo, diminuição de vibrações) até o estudo
de novas técnicas de controle e acionamento para otimização
da operação. É pelo fato de o motor a relutância variável ser
potencialmente viável para vários tipos de aplicações,
apresentando resultados melhores do que os motores de
indução e síncrono, que o presente trabalho se justifica.
I.I Considerações iniciais
II. PRINCÍPIO DE FUNCIONAMENTO DOS MRV’S
O motor a relutância variável (MRV) é um dos tipos de
motores elétricos mais antigos. O primeiro motor que se tem
notícia foi construído por Davidson em 1838 na Escócia, e
foi utilizado em uma locomotiva.
Sua característica 1 marcante é a estrutura simples,
combinando a simplicidade dos enrolamentos de campo dos
motores de corrente contínua com a robustez associada aos
motores de indução, além da vantagem de não utilizar ímãs
permanentes, escovas ou comutadores.
Devido às características construtivas, estes motores não
podem ser conectados diretamente à rede de alimentação, e
requerem acionamento eletrônico e conhecimento da posição
instantânea do rotor. Adicionalmente, seu projeto exige a
análise do circuito magnético e simulações com ferramentas
Por definição um motor a relutância é um motor elétrico
no qual o conjugado é produzido pela tendência da sua parte
móvel se deslocar para a posição onde a indutância do
enrolamento excitado é maximizada, ou seja, quando
energizamos uma fase qualquer do motor os pólos da parte
móvel tendem a se alinhar com os pólos da parte fixa mais
próximos, portanto para produzir o conjugado, os MRV´s
devem ser projetados de tal forma que as indutâncias do
enrolamento do estator variem com a posição do rotor. Desta
maneira, utilizando-se os princípios de conjugado e de
inércia (a tendência de um corpo qualquer continuar em
movimento após ter sido acelerado), própria de qualquer
sistema mecânico e utilizando-se também a lógica adequada
de energização das fases, pode-se acionar o MRV de maneira
bastante simples. O enrolamento consiste de uma série de
circuitos elétricos independentes – fases, que podem ser
energizadas separadamente ou simultaneamente, com pulsos
unidirecionais de corrente nas fases. As máquinas de
Keywords – driving motors, switched reluctance motor,
torque.
“Artigo publicado na IV Conferência de Estudos em Engenharia Elétrica (IV
CEEL) realizada no período de 22 a 25 de Novembro na Universidade
Federal de Uberlândia, Uberlândia MG.”
relutância variável podem ser divididas em duas categorias:
saliência simples ou dupla. Em ambos os casos, sua
característica mais notável é a não existência de
enrolamentos ou imãs permanentes no rotor, ele é construído
com lâminas de material magnético fixadas ao longo do eixo,
formando os pólos salientes. Esta característica garante
robustez, viabiliza operação em velocidades elevadas e
operacionalmente não ocorrem perdas Joule no rotor, o que
contribui favoravelmente para que a máquina opere com
rendimento elevado. Sua única fonte de excitação é o
enrolamento do estator. Devido ao fato de o estator
geralmente poder ser resfriado mais fácil e eficientemente
que o rotor, o resultado é geralmente um motor menor para
uma dada potência e tamanho da carcaça se comparado a
outros tipos de motores.
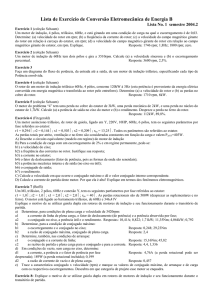
Nas máquinas polifásicas, o número de pólos do estator e
rotor deve ser diferente, sendo possíveis várias combinações
tais como 6/4 (6 pólos no estator e 4 pólos no rotor), 8/6,
10/6, 12/8. As configurações com maior número de pólos
resultam em menores oscilações do conjugado produzido,
mas requerem um número maior de dispositivos estáticos no
conversor.
Pode-se observar na figura 1 que os enrolamentos de fase
são conectados em pólos diametralmente opostos.
saliência do estator aumenta a diferença entre os valores
máximo e mínimo da indutância, o que por sua vez melhora
as características de produção do conjugado da máquina.
Observa-se na figura 2 que as indutâncias têm período de
90º que corresponde ao passo polar no rotor. Entre as fases, o
deslocamento é de 60º, o que corresponde a 360º dividido
pelo número de pólos do estator
Figura 2 – Perfil das indutâncias de fase idealizadas
.
A indutância da fase A é máxima em 0º, 90º, 180º, 270º,
posições em que o rotor se alinha com o pólo do estator. A
medida que o rotor gira no sentido horário, os pólos se
desalinham e a indutância decresce linearmente (dL/d? é
constante e negativo). Na seqüência, a fase B inicia a
sobreposição dos pólos e a indutância cresce linearmente
(dL/d? é constante e positiva).
III. PRODUÇÃO DE CONJUGADO
Figura 1- Motor a relutância variável 6/4
Ao alimentar uma das fases, o par de pólos do estator
respectivo atrai o pólo do rotor mais próximo, buscado
minimizar a indutância do caminho magnético. A
energização sucessiva das fases produz a rotação do motor,
em qualquer direção.
Quando um par de pólos do rotor estiver alinhado com os
pólos do estator, essa fase se encontra na posição alinhada.
Nesta posição a indutância de fase é máxima e a relutância
do caminho magnético é mínima. Assim, quando os pólos
estiverem alinhados não haverá produção de conjugado
naquela fase, pois a tendência é que o rotor permaneça nessa
posição de mínima relutância.
Girando o rotor 45º no sentido horário, o pólo do estator
ficará desalinhado dos pólos do rotor. Diz-se então que o
rotor encontra-se na posição desalinhada. Esta é uma posição
instável e qualquer deslocamento do eixo moverá o rotor
para a próxima posição de alinhamento desde que haja
corrente na fase. Nesta posição de total desalinhamento, a
indutância de fase é mínima e a relutância é máxima devido
ao entreferro.
É importante observar que a indutância varia com a
posição do rotor e também com as correntes de fase. A
Partindo do princípio do balanço da energia para definir
acoplamento eletromecânico, o trabalho mecânico necessário
para mover o rotor do motor a relutância é definido pela
energia elétrica líquida de entrada, menos a energia
armazenada no campo, tal como expresso em (1).
dWmec = dWele − dWcpo
(1)
Onde:
dWmec = energia mecânica diferencial de saída, inluindo
as perdas por atrito e ventilação;
dWele = energia elétrica diferencial de entrada
descontadas as perdas resistivas;
dWcpo = energia de campo diferencial.
A energia líquida de entrada pode ser expressa em termos
das correntes e tensões nos circuitos elétricos do dispositivo
de acoplamento, conforme a equação (2), onde o primeiro
termo do lado direito da equação corresponde ao diferencial
de energia elétrica de entrada no tempo dt e o segundo termo
corresponde às perdas resistivas.
dWele = V .i.dt − R.i 2 .dt
(2)
Onde:
W ' cpo =
V = Tensão aplicada aos terminais do enrolamento;
R = Resistência do enrolamento;
I = corrente no enrolamento.
Tomando-se a derivada parcial da co-energia e mantendo
constantes as correntes das fases tem-se:
Para que o dispositivo de acoplamento possa absorver
energia do circuito elétrico, o campo de acoplamento deve
produzir uma reação sobre o circuito, que segundo a Lei de
Faraday é:
e = vi − R.i
(3)
C=
C=
e = tensão induzida no enrolamento.
Substituindo a equação (3) em (2):
(4)
Sabendo-se que:
dλ
dt
e substituindo a equação (5) em (4) tem-se:
e=
(5)
dWele = i.d λ
(6)
Para a determinação da energia absorvida pelo campo,
considera-se que não há movimento mecânico e portanto o
termo dWmec é igual a zero e a equação (1) se torna:
dWele = dWcpo
(7)
Desta forma, a energia elétrica de entrada associada uma
variação do fluxo é absorvida pelo campo:
λ2
∫
dWcpo = id λ
(8)
λ1
∂ W' cpo (i, θ)
∂θ
1 2 dLa (θ) 1 2 dLb ( θ) 1 2 dLc (θ)
ia .
+ ib .
+ ic .
(13)
2
d (θ)
2
d(θ)
2
d(θ)
Conforme a equação (13), o conjugado é proporcional ao
quadrado das correntes nas fases e à indutância em relação à
posição do rotor. Ao aplicar corrente nos intervalos de
posição em que uma dada fase possui dL/d? positivo,
conjugado positivo é produzido. Se for aplicada corrente
quando dL/d? é negativo, o conjugado produzido é negativo.
Quando uma fase é excitada, o conjugado tende a
movimentar o rotor para a posição mais próxima do máximo
enlaçamento de fluxo. Ao remover a excitação desta dada
fase e excitar a próxima, o rotor se movimenta no sentido de
maximizar o fluxo da nova fase excitada e assim
sucessivamente.
Observa-se ainda pela análise da equação (13) que o
sentido do conjugado não depende do sentido da corrente
aplicada. Esta é uma característica marcante dos MRV’s pois
torna o acionamento do motor mais simples, uma vez que,
sem a necessidade de corrente reversa, o circuito de controle
pode utilizar, em determinados modos de operação, somente
uma chave por fase, reduzindo assim o custo e a
complexidade do conjunto motor/conversor. A figura 3
ilustra o conjugado em função da posição do rotor para cada
uma das fases do motor 6/4.
sendo que a expressão da co-energia de campo é:
i2
∫
dW'cpo = λdi
(9)
i1
onde,
λ = L.i
(12)
Portanto, substituindo 11 em 12 tem-se a expressão do
conjugado:
Onde:
dWele = e.i.dt
1
1
1
La ( θ)ia 2 + Lb ( θ)ib 2 + Lc (θ)ic 2 (11)
2
2
2
(10)
Neste momento, é importante considerar que, devido ao
princípio de funcionamento do MRV, duas variáveis
independentes são necessárias para descrever a energia total
do sistema. Uma delas é a posição do rotor e a escolha da
corrente ou do fluxo enlaçado como a outra variável de
estado é arbitrária, e a as duas conduzem à expressão do
conjugado.
Assim, o conjugado eletromagnético é determinado a
partir da expressão da co-energia, conforme segue:
Figura 3 - Produção de conjugado
Na posição de máxima indutância em ? = 0º, a
contribuição de conjugado da fase A é nula pois neste ponto
não há variação da indutância. Em seguida, inicia-se o
decrescimento da indutância e, se houver aplicação de
corrente neste momento, o conjugado produzido será
negativo. No momento em que a indutância é mínima
também não é produzido conjugado. A partir de 60º, quando
a indutância começa a crescer, é produzido conjugado
positivo.
Uma observação importante é que, para obter conjugado
com características específicas é importante sincronizar a
energização das fases com a posição angular do rotor
Desta forma, deve-se conhecer a posição instantânea do
rotor em relação aos pólos do estator. Isto pode ser obtido
através de sensores de posição no eixo do motor ou através
de técnicas de determinação indireta de posição do rotor.
Adicionalmente, a escolha a adequada dos ângulos de
chaveamento é muito importante na definição do perfil e
nível de conjugado que uma dada máquina pode desenvolver.
IV.SISTEMAS DE ACIONAMENTO DO MRV
Diferentemente das máquinas ca e cc (síncrona ou
indução), não se pode simplesmente ligar os MRV’s numa
fonte de ca ou cc e esperar que eles funcionem. Como foi
visto, as fases devem ser excitadas com correntes
(geralmente unipolares), e a temporização dessas correntes
deve ser cuidadosamente relacionada com a posição dos
pólos do rotor para produzir um conjugado médio útil. O
resultado é que apesar do MRV ser em si talvez a máquina
rotativa mais simples, um sistema de controle real para um
MRV é relativamente complexo.
Sis temas de controle de MRV são competitivos somente
porque esta complexidade pode ser facilmente realizada
utilizando circuitos da eletrônica de potência e
microeletrônica, cujos custos são relativamente baixos.
Devido ao fato desses sistemas de acionamento exigirem um
nível bastante sofisticado de controlabilidade, mesmo para os
modos mais simples de operação do MRV, características de
controle sofisticadas podem ser incorporadas (geralmente na
forma de softwares adicionais) com pequeno custo adicional,
aumentando assim a competitividade dos MRV’s.
A função do sensor de posição do rotor é fornecer uma
indicação da posição do eixo, a qual pode ser usada para
controlar a temporização e a forma de onda da excitação da
fase.
O controlador é geralmente implementado em softwares
em circuitos de microeletrônica (microprocessador). Sua
função é determinar a seqüência e as formas de onda da
excitação da fase requerida para obter as características
conjugado-velocidade desejadas. Além de determinar pontos
de velocidade e/ou conjugado e posições do eixo (através do
sensor de posição), controladores sofisticados geralmente
incorporam entradas adicionais, incluindo velocidade do eixo
e a magnitude da corrente de fase. Junto com a função básica
de controle, para determinar o conjugado desejado para uma
dada velocidade, os controladores mais sofisticados visam
fornecer excitações as quais são de alguma forma otimizadas
(para máxima eficiência, comportamento transitório estável,
etc.).
O circuito de controle geralmente consiste de
componentes eletrônicos de baixa potência os quais não
podem ser usados para fornecer diretamente as correntes
necessárias para excitar a fases do motor. O circuito de
controle atua no inversor, que por sua vez fornece a corrente
de fase. Em geral o inversor consiste de uma fonte cc e um
conjunto de chaves controláveis cuja função é conectar as
várias fases na fonte cc em tempos apropriados determinados
pelo controlador
O controle do MRV é obtido pela aplicação de correntes
aos enrolamentos de fase. O enrolamento de fase do MRV
pode ser visto como uma indutância não linear (devido aos
efeitos da saturação magnética), variável no tempo (devido
às mudanças na posição do rotor com o tempo). Muitas das
questões associadas ao controle de corrente nesses sitemas
podem ser investigadas considerando-se a situação de
indutância constante fornecida por uma fonte cc.
O desempenho de um sistema de acionamento completo
de um MRV está amarrado ao desempenho de todos os seus
componentes, incluindo o MRV, seu controlador e seu
inversor. Como resultado, é útil projetar um sistema de
acionamento completo como um conjunto integrado, e não
projetar seus componentes individuais. A escolha de um
inversor para uma aplicação específica deve ser feita baseada
em considerações técnicas e financeiras como parte de um
projeto integrado do sistema de acionamento do MRV.
V- CONCLUSÕES
Foi apresentada uma análise do motor a relutância
variável sob seu aspecto operacional. O princípio de
funcionamento foi discutido visando uma compreensão da
dinâmica do motor, seguida de uma abordagem sobre a
produção de conjugado da máquina. A forma de acionamento
desse tipo de motor foi abordada, uma vez que é de extrema
importância a sua compreensão para que se obtenha o
melhor desempenho possível.
AGRADECIMENTOS
Agradecemos ao professor Darizon Alves de Andrade por
nos dar a oportunidade de ingressarmos em um projeto de
pesquisa e nos oferecer as condições de escrever esse artigo.
REFERÊNCIAS BIBLIOGRÁFICAS
[1] FITZGERALD, A. E.; KINGSLEY JR, C.; KUSKO,
th
A. “Electric Machinery”, 6 Edition, McGraw-Hill Inc,
1971.
[2] HWANG, Gisele Regina; “Modelagem da Máquina à
Relutância Chaveada Incluindo a Saturação Magnética” ,
Dissertação de Mestrado, Universidade Federal de
Uberlândia, Outubro, 2002 .
[3] COSTA, Rogério dos Santos; “Estudo da Melhoria de
Desempenho de Acionamentos Elétricos Utilizando MRC’s
Monofásicos”, Dissertação de Mestrado, Universidade
Federal de Uberlândia, Outubro, 2004
[4] T.J.E MILLER “ Switched Reluctance Motors and
their Control ”. Magna Physics Publishing and Clarendon
Press – Oxford. 1993. ISBN 1-881855-02-3.
[5] KRISHNAN, R.; “Switched Reluctance Motors
Drives”,
1st Edition, Industrial Electronics Series, 2001.










![Matemática | Professor(a): Eron | Menção: Bimestre: 1º [ ] 2º [ ] 3º [ x](http://s1.studylibpt.com/store/data/002254247_1-e6d99ff08b8781d03ba9e3251ba69d50-300x300.png)