Movimento Rotacional
Tecnologias de Informação e Comunicação na Educação
Professora Karen Luz Burgoa Rosso
Tutor: Antônio Marcelo Martins Maciel
Lavras/MG
2011
1|Página
Ficha catalográfica preparada pela Divisão de Processos
Técnicos da Biblioteca Central da UFLA
Espaço a ser preenchido pela biblioteca
[A ser preenchido posteriormente]
Espaço a ser preenchido pelo CEAD
______________Digite o Título do Documento______________
Índice
Unidade 6 .......................................................................................................... 6
1.1.
A descrição física do problema ............................................................. 7
1.2. Sólido rígido............................................................................................... 7
1.3 Centro de massa ...................................................................................... 8
1.4. Velocidade angular e Aceleração Angular .............................................. 9
1.5. Energia cinética rotacional ..................................................................... 10
1.6. Momento de Inércia ................................................................................. 11
1.7. Torque e o produto vetorial .................................................................... 12
1.8. Trabalho energía no movimento rotacional .......................................... 15
1.9. Bibliografia ............................................................................................... 15
5|Página
______________Movimento Rotacional______________
Unidade 6
OBJETIVO: Nesta unidade definiremos um conceito muito importante na
física, isto é, o centro de massa de um sistema de partículas. Este novo
conceito é fundamental para entender a cinemática e dinâmica de um
corpo extenso, que é justamente o tema desta unidade.
6|Página
______________Movimento Rotacional______________
1.1. A descrição física do problema
Até agora aprendemos a descrever a dinâmica e cinemática de
uma partícula, seja através das forças ou através dos conceitos
de energia, mas ainda não sabemos como descrever o
movimento de um corpo extenso girando e se trasladando ao
mesmo tempo.
Nesta unidade ao falar de corpo extenso estaremos nos referindo
a um corpo ideal conhecido na física como sólido rígido.
1.2. Sólido rígido
Um corpo rígido é qualquer sistema de partículas no qual as
partículas permanecem em posições fixas entre si. Chamaremos
esse modelo de simplificação como o modelo do corpo rígido,
similar ao modelo da partícula que vimos nos guias anteriores.
7|Página
______________Movimento Rotacional______________
1.3
Centro de massa
Nas unidades anteriores descrevemos o movimento global dos
corpos em termos de um ponto muito especial chamado centro de
massa do sistema. A noção de centro de massa nos da confiança
no modelo de partícula, pois veremos que o centro de massa
acelera como se toda a massa do sistema estivesse concentrada
nesse ponto, e como se todas as forças agissem lá. O centro de
massa para um sistema discreto de partículas é definido como:
rCM = (m1*r1+ m2*r2+ m3*r3+....)/( m1+ m2+ m3+....)
onde ri é a posição na qual a partícula de massa mi encontra-se.
A definição de centro de massa para um sistema físico composto
por numero infinito de partículas é:
rCM = 1/M
∫rdm,
Onde M é a massa total do sistema, o vetor r é a posição do
diferencial de massa dm. Uma importante informação para corpos
homogêneos simétricos é que seu centro de massa deve estar
sobre seu eixo de simetria.
8|Página
______________Movimento Rotacional______________
1.4. Velocidade angular e Aceleração Angular
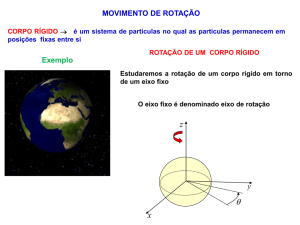
Quando um sólido rígido sofre um movimento rotacional ele o
fará ao redor de um ponto de rotação. Veja na seguinte figura
como um mesmo corpo pode ter diferentes eixos de rotação.
Para descrever o movimento rotacional são definidas grandezas
vetoriais equivalentes às grandezas vetoriais que descrevem o
movimento linear. Equivalente ao deslocamento espacial tem o
deslocamento angular. A velocidade angular instantânea é a
análoga ao vetor velocidade instantânea
=d/dt
A aceleração angular é definida como:
=d/dt
Para o caso de aceleração constante, MRUV, na primeira
unidade foram desenvolvidas as equações da cinemática.
Igualmente pode ser feito para o caso de aceleração angular
constante, e em analogia a MRUV encontramos equações muito
parecidas.
9|Página
______________Movimento Rotacional______________
A direção e sentido dos vetores velocidade angular e aceleração
angular são obtidas utilizando-se a regra da mão direita. Veja a
figura embaixo e com a mão aberta posicione os seus dedos, da
mão direita, de modo que eles fechem no mesmo sentido da
rotação, se a posição inicial é r1 e a posição final r2, feche os
quatro dedos e deixe o dedo polegar apontando para cima, o
sentido de rotação dos seus quatro dedos foram em sentido antihorário então nesse caso o vetor velocidade e aceleração angular
estão apontando para cima, assim como seus dedos polegar.
1.5. Energia cinética rotacional
Imagine que você comece uma serie de exercícios em uma
bicicleta ergométrica. Você aplica uma força com seus pés sobre
os pedais fazendo que se desloquem neste momento você
realizou trabalho. O resultado desse trabalho é a rotação da roda.
Esse movimento rotacional representa energia cinética, pois há
10 | P á g i n a
______________Movimento Rotacional______________
massa em movimento. Esta energia é conhecida como energia
cinética rotacional, ela não é uma nova forma de energia. Se a
massa da i-ésima partícula é mi e o modulo da sua velocidade
tangencial é vi então a energia cinética dessa partícula é
Ki = ½ mi vi2
Podemos expressar a energia cinética total do corpo rígido como
a soma das energias cinéticas das partículas individuais.
Em analogia a energia cinética da partícula tem que a energia
rotacional do corpo rígido é igual a ½ I 2, onde é a velocidade
angular do corpo rígido e a letra I representa o momento de
inércia do corpo.
1.6. Momento de Inércia
O momento de inércia é uma medida da resistência à variação na
velocidade angular de um sistema. Assim no movimento
rotacional ele exerce o mesmo papel que a massa exerce no
movimento translacional. Observe que o momento de inércia não
depende apenas da massa do corpo rígido, mas também de como
a massa esta distribuída ao redor do eixo de rotação. Veja a
seguir alguns exemplos de momento de inércia.
11 | P á g i n a
______________Movimento Rotacional______________
1.7. Torque e o produto vetorial
Lembra-se da bicicleta ergométrica? Nós geramos o
movimento rotacional da roda aplicando força aos pedais.
Quando uma força é exercida sobre um corpo rígido que
pode girar em torno do eixo, e a linha de ação da força
não passa através do ponto de apoio no eixo, o corpo
tende a girar ao redor desse eixo. Na unidade dois, vimos
que a condição de movimento é dada pela segunda lei de
Newton, isto é, se a soma de todas as forças que atuam
na partícula não é nula a partícula terá uma aceleração e
logo terá movimento. Agora veremos que a condição de
movimento rotacional é uma grandeza física conhecida
como Torque. Vejamos o caso de uma porta.
12 | P á g i n a
______________Movimento Rotacional______________
Seja uma força F aplicada a uma porta para ela fechar. Aplica-se
a força bem próxima da dobradiça da porta, eixo de rotação da
porta, então a porta não rodara e nem fechará. Por outro lado se
aplicamos a mesma força perto da maçaneta da porta ela irá girar
e fechará. Então neste exemplo vemos que para uma porta rodar
não somente precisamos da força, mas também a onde a força
será aplicada. A grandeza vetorial torque leva em conta a
condição de rotação do corpo rígido. O torque é definido através
do produto vetorial de dois vetores. O produto vetorial entre dois
vetores resulta em um vetor cujo módulo é determinado através
da seguinte equação:
C = A*B*sen()
Onde A e B são os módulos dos vetores e é o ângulo formado
entre os dois vetores. A direção deste vetor C é indicada pelo
polegar da mão direita, como mostra a figura.
13 | P á g i n a
______________Movimento Rotacional______________
Veja que o produto vetorial de dois vetores não é comutativo,
AXB é diferente de BXA.
O torque é o produto vetorial entre o vetor força e o vetor radial
que tem origem no eixo de rotação até onde a força esta sendo
aplicada. Matematicamente temos
= rXF
Onde o símbolo indica o vetor torque, r é o vetor radial, e F é o
vetor força. Temos agora como indicar as equações que indicam
a condição de equilíbrio de um sólido rígido.
∑F = 0 e ∑ = 0
A primeira condição é uma formulação do equilíbrio translacional.
A segunda é uma formulação do equilíbrio rotacional.
O equivalente a segunda lei de Newton para o movimento
rotacional do corpo rígido pode ser formulado da seguinte
maneira.
∑ = I
Onde I é o momento de inércia do corpo rígido e é o vetor
aceleração angular.
14 | P á g i n a
______________Movimento Rotacional______________
1.8. Trabalho energía no movimento rotacional
Agora um sistema físico que contem um corpo rígido e no qual
são aplicadas forças conservativas terá a energia mecânica
também sendo conservada. A única mudança da equação da
conservação da energia mecânica neste caso deve-se a presença
da energia cinética rotacional. Matematicamente temos:
Ei = E f
ou
Ki + KRi + Upi + Uei = Kf + KRf + Upf + Uef
O índice i indica o instante inicial, e o índice f indica o instante
final. A equação acima descrita indica a conservação da energia
mecânica de um sólido rígido. A energia mecânica deve levar em
conta a energia cinética e potencial das partículas e a energia
cinética, potencial e rotacional dos corpos rígidos.
1.9. Bibliografia
Raymond A. Serway e John W. Jewett, Jr. Princípios de Física,
Volume 1, tradução ao português da Terceira edição Americana,
2004.
Halliday, Resnick e Walker, Fundamentos de Física, Volume 1,
Oitava Edição, 2007.
15 | P á g i n a