MOVIMENTO DE ROTAÇÃO
CORPO RÍGIDO é um sistema de partículas no qual as partículas permanecem em
posições fixas entre si
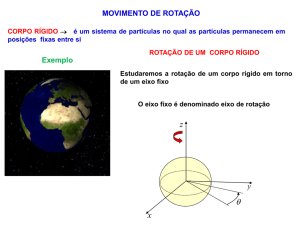
ROTAÇÃO DE UM CORPO RÍGIDO
Exemplo
Estudaremos a rotação de um corpo rígido em torno
de um eixo fixo
O eixo fixo é denominado eixo de rotação
z
y
x
O sentido da rotação é dado pela regra da mão direita
z
positivo
negativo
MOMENTO DA FORÇA ( ou TORQUE)
Quando empurramos uma porta, estamos aplicando uma força sobre a porta
como consequência a porta vai girar em torno dum eixo fixo que passa
pelas dobradiças.
A tendência da força de rodar o corpo em torno de um
eixo é medida por uma grandeza vectorial denominada
momento da força (ou torque)
r
O momento da força é a causa dos movimentos
rotacionais
É análogo a força que causa variações no movimento
translacional
Definimos o momento da força por
M r F
O módulo do momento da força é
M
F
M rF sin
Corresponde ao produto da distância até o ponto de aplicação da
força e a componente perpendicular da força.
r
APLICAÇÃO DUMA FORÇA EM PONTOS DIFERENTES NUMA PORTA
Quando fechar uma porta, experimente fechá-la, empurrando-a no centro da porta
(Figura a) e depois, aplicando a mesma força, empurre a porta na extremidade (Figura
b).
M rF sin
A porta é fechada mais facilmente quando a força é aplicada na
extremidade da porta
O que é uma alavanca? É uma barra rígida apoiada (ponto de apoio O)
utilizada para facilitar o deslocamento de um corpo pesado.
A distância do ponto de apoio O, por onde passa o eixo de rotação, à linha de
acção da força F, é denominada braço de alavanca, (L)
Arquimedes disse: “Dê-me uma
alavanca que moverei o mundo”
M rF sin
M (r sin ) F LF
MOVIMENTO DE UM CORPO RÍGIDO
Um corpo rígido pode ter três movimentos
1º - O movimento de translação quando todos os pontos percorrem
trajectórias paralelas
No movimento de translação do corpo rígido,
todas as partículas sofrem o mesmo
deslocamento durante o mesmo intervalo de
tempo, de modo que todas possuem, em
qualquer instante, a mesma velocidade e
aceleração.
2º - O movimento de rotação quando todos os pontos percorrem trajectórias
circulares
3º - Combinação do movimento de rotação e de translação
Movimento rotacional puro
Movimento translacional + rotacional
MOVIMENTO DE ROTAÇÃO E TRANSLAÇÃO DA TERRA
ENERGIA CINÉTICA ROTACIONAL
Suponhamos um corpo rígido que gira ao redor de um eixo z
Cada partícula de massa mi do corpo rígido descreve uma
trajectória circular de raio ri com velocidade tangencial vi
Energia cinética de uma partícula do corpo rígido
1
K i mi vi2
2
Relação entre a velocidade tangencial e velocidade angular
vi ri
Substituindo em
Ki
Ki
1
1
mi 2 ri 2 mi ri 2 2
2
2
Energia cinética total
1
K total mi ri 2 2
2 i
Não é uma nova forma de energia.
A forma é diferente porque é aplicada a um corpo em rotação
Unidade: joule (J)
MOMENTO DE INÉRCIA
1
K R I 2
2
I mi ri 2
onde
é o momento de inércia
i
Unidade : kg m 2
O momento de inércia representa uma resistência ao movimento de rotação
No movimento rotacional o momento de inércia exerce o mesmo papel que a massa
no movimento translacional
Podemos reescrever a expressão do momento de inércia em termos de dm
lim
2
2
I mi
r
m
r
0 i
i
dm
i
MOMENTO DE INÉRCIA DE ALGUNS CORPOS RÍGIDOS
O MOMENTO ANGULAR
Definimos inicialmente o momento
angular
partícula com momento linear p .
L r p
L
é o momento angular instantâneo L
de uma
L r p
em
relação à origem O
p
m
r
Note que a partícula não precisa estar girando em
torno de O para ter momento angular em relação a este
ponto a rotação não é necessária para o momento
angular
MOSTRAREMOS QUE O MOVIMENTO ROTACIONAL TEM UMA LEI DE MOVIMENTO
SEMELHANTE À SEGUNDA LEI DE NEWTON
Derivando o momento angular
L
em relação ao tempo:
dL d
dr dp
(r p)
p r
dt dt
dt
dt
=0
como
f
dp
dt
dL
r f M
dt
ou
dL
M
dt
análogo à segunda lei de newton
A relação acima é válida também para um sistema
de partículas onde o momento angular é a soma
vectorial dos momentos angulares de cada partícula
em relação ao mesmo ponto fixo O
A mesma relação é válida para um corpo
rígido, em rotação em torno de um ponto O.
dL
M
dt
A soma dos momentos das forças internos são nulos
e
M
corresponde à um momento da força externo resultante
dp
f
dt
O MOMENTO ANGULAR DE UM CORPO RÍGIDO
Suponhamos um corpo rígido que gira ao redor de um eixo z
Lembrando que
L r p
O momento angular total do corpo rígido será
L
m v r
i
i i
i
como vi ri obtemos
L
2
m
(
r
)
r
(
m
r
i i i i i )
i
e
I
i
2
m
r
ii
é o momento de inércia
e o momento angular pode ser escrito como
que é análogo à
L I
p mv
O momento de inércia representa uma resistência ao movimento de rotação
CONSERVAÇÃO DO MOMENTO ANGULAR
Quando
dL
M
r f 0 L constante
dt
se
i) f 0 ou ii) r 0
M 0
ou
L constante
Li L f
Análogo ao que acontece com o momento linear
pi p f
iii) quando a força é colinear com o vector posição teremos também
M 0
Exemplo:
FORÇAS CENTRAIS, que são forças da forma
F (r ) f (r ) u
Neste caso:
dL
M
r f (r )u 0
dt
L constante
EXEMPLO 1: CONSERVAÇÃO DO MOMENTO ANGULAR
No sistema homem - halteres só há forças internas e, portanto:
L I constante
f I f
i I i
Com a aproximação dos halteres (
I i i I f f
If
<
Ii
) a velocidade angular do sistema aumenta
Exemplo 3: CONSERVAÇÃO DO MOMENTO ANGULAR
No caso da mergulhadora da figura ao lado o CM segue um movimento parabólico
I mi ri
i
LL
onde
dL
0 L const.
dt
L
e o momento angular
da nadadora é constante
durante o salto. Juntando braços e pernas, ela pode
aumentar sua velocidade angular em torno do eixo
que passa pelo CM, às custas da redução do momento
de inércia em relação a este eixo
Mg
Mg