TRANSFORMAÇÕES LINEARES
Introdução
Estamos familiarizados com funções ordinárias tais como a
função f definida pela equação f(x) = x2. Essa função transforma
um número real em outro número real, no caso, no seu quadrado.
Por exemplo, o número 2 é transformado em 4, isto é, f(2) = 4.
Estudaremos agora funções que transformam vetores em vetores.
Em geral, se V e W são espaços vetoriais, uma função ou
TRANSFORMAÇÃO T de V para W é uma regra que associa a
todo vetor x em V um único vetor em W que é denotado por
T(x).
Se x é um vetor em V, então T(x) é chamada a IMAGEM
de x sobre a transformação T.
Por exemplo, se T é uma transformação do 3 para o 2
definida pela equação:
T(x1, x2, x3) = (x1 + x2, x2 + x3)
Então T leva o vetor (1,1,1) no vetor T(1,1,1) = (2,2) e o
vetor (3,2,0) no vetor T(3,2,0) = (5,2).
Definição
Sejam V e W dois espaços vetoriais. Uma transformação
(ou aplicação) T: V W é chamada de LINEAR se para todos
os vetores x e y em V e para todo escalar ,
T(x + y) = T(x) + T(y)
T(x) = T(x)
Uma transformação linear T: V W preserva a adição e a
multiplicação por escalar entre os vetores.
Usando-se as duas propriedades simultaneamente chegamos
a uma terceira propriedade:
Sejam v1 e v2 vetores em V e 1 e 2 dois escalares, então:
T(1v1 + 2v2) = T(1v1) + T(2v2) = 1 T(v1) + 2 T(v2)
Diz-se que uma transformação linear satisfaz o princípio da
superposição, que é essa terceira propriedade. Mas o princípio da
superposição pode ser aplicado a n vetores em V e n escalares.
Ora, mas isso é uma combinação linear. Logo, T preserva
combinações lineares.
Exemplo 1:
V =R e W = R
F:RR
u u ou F(u) = u
F(u + v) = (u + v) = u + v = F(u) + F(v).
F(ku) = (ku) = ku = kF(u).
Então F é uma transformação linear.
Exemplo 2:
Seja T a transformação dada por
T(x,y)= (x-y, x+y). T é linear?
Exemplo 3:
F(u) = u2 é uma transformação linear?
Não, pois F(u + v) = (u + v)2 = u2 + 2vu + v2 =
F(u) + 2vu + F(v) F(u) + F(v).
Exemplo 4:
L: 2 , L(v) = L(x,y) = 2x + 4 é uma
transformação linear?
Sejam u = (u1, u2) e v = (v1, v2)
L(u + v) = L(u1 + v1, u2 + v2) = 2 (u1 + v1) + 4
L(u + v) = 2u1 + 2v1 + 4 L(u) + L(v).
Portanto L não é uma transformação linear.
Exemplo 5: Seja D : Pn Pn, onde Pn é um polinômio e D é a
aplicação derivada. Pelas propriedades das
derivadas, sabe-se que:
D(f + g) = D(f) + D(g).
D(kf) = k D(f).
Então D é uma transformação linear.
Observação: Decorre da definição que uma transformação
linear T, T: V W leva o vetor nulo de V no vetor nulo de W,
isto é, se 0 V, T(0) = 0 W. Isto nos ajuda a detectar
transformações não lineares. Se T(0) ≠ 0, T não é linear. No
entanto, T(0) = 0 NÃO é suficiente para que T seja linear.
Exemplo: T: 3 3 onde T(x,y,z) = (x+1, y,z) é linear?
Transformações do plano no plano
Vamos
apresentar
uma
visão
geométrica
das
transformações lineares, dando alguns exemplos de
transformações do plano no plano.
a) Expansão ou contração uniforme:
T : R2 R2 , V tal que T(u) = u
(x,y) (x,y)
b) Reflexão em torno do eixo x:
T: R2 R2
(x,y) (x, -y)
c) Reflexão na origem:
T: R2 R2
(x,y) (-x, -y)
d) Rotação de um ângulo t no sentido anti horário:
Rt: R2
R2
(x,y) (x cos t – y sen t, y cos t + x sen t)
Teorema: Dados dois espaços vetoriais reais V e W e uma base
de V, {v1, ..., vn}. Sejam w1, ..., wn elementos arbitrários de W.
Então existe uma única aplicação linear T : V W tal que:
T(v1) = w1, ...., T(vn) = wn.
Se v = a1v1 +... anvn, esta aplicação é dada por
T(v) = a1T(v1) + ... + anT(vn) = a1w1 +... anwn
Isto significa que as aplicações lineares são determinadas
conhecendo-se apenas seu valor nos elementos de uma base.
Exemplo: Qual é a transformação linear T: R2 R3 tal que
T(1,0) = (2,-1,0) e T(0,1) = (0,0,1)?
Imagem e Núcleo
Imagem:
Im (T) = {w W; T(v) = w, para algum v V}.
Isto é, a imagem de T é o conjunto dos vetores w de W tais
que existe um vetor v V, que satisfaz T(v) = w.
Im (T) W é um subconjunto de W e, além disso, um
subespaço vetorial de W.
Núcleo:
Ker(T) = {v V; T(v) = 0}.
Ou seja, o conjunto de todos os vetores v V tais que
T(v) = 0 é chamado núcleo de T, sendo denotado por Ker(T).
Ker(T) V é um subconjunto de V e, ainda mais, é um
subespaço vetorial de V.
Exemplo: T: R2 R
(x,y) x+y
Im(T) = , pois dado w , w = T(w,0).
Ker(T) = {(x,y) 2 / x + y = 0} ou x = -y; v = (-1,1) gera
o núcleo. O núcleo tem a dimensão de W, nesse caso.
Definição: Dada uma aplicação T: V W, diremos que T é
INJETORA se dados u, v V com u ≠ v, então T(u) ≠ T(v)
Definição: A aplicação T: V W será SOBREJETORA se a
imagem de T coincidir com W, ou seja, T(V) = W.
Propriedade: Uma transformação linear é injetora se, e
somente se, Ker(T) = {0}.
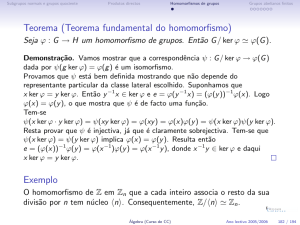
ESPAÇOS VETORIAIS ISOMORFOS
Quando uma transformação linear T : V W for injetora e
sobrejetora ao mesmo tempo, dá-se o nome de ISOMORFISMO.
Quando há tal transformação entre dois espaços vetoriais
dizemos que estes são ISOMORFOS. Sob o ponto de vista da
Álgebra Linear, espaços vetoriais isomorfos são, por assim dizer,
idênticos.
Em outras palavras, quando a correspondência biunívoca
entre dois espaços vetoriais preserva as operações de adição e
multiplicação por escalar, T(v + w) = T(v) + T(w) e T(kv) = k
T(v), diz-se que esses espaços são isomorfos.
T:VW
dim Ker(T) + dim Im(T) = dim V
Obs: Toda transformação linear pode ser representada por uma
matriz. Exemplos:
1) Reflexão em torno do eixo x:
T: R2 R2
(x,y) (x, -y)
x x
y y
ou
x 1 0 x
y 0 1 y
2) Reflexão na origem:
T: R2 R2
(x,y) (-x, -y)
x x
y y
ou
x 1 0 x
y 0 1 y
Referências Bibliográficas:
http://www.stamford.pro.br/ARQUIVOS/2002_Algebra.doc
BOLDRINI, C. Álgebra Linear. 3ª ed. Editora Harbra, 1986.