UNIVERSIDADE FEDERAL DE JUIZ DE FORA
Setor de Tecnologia
Faculdade de Engenharia
Programa de Pós-Graduação em Engenharia Elétrica
Um Estudo do Aerogerador de Velocidade
Variável e Sua Aplicação para
Fornecimento de Potência Elétrica
Constante
Marcello Monticelli Pereira
Juiz de Fora, MG - Brasil
Outubro de 2004
Um Estudo do Aerogerador de Velocidade
Variável e Sua Aplicação para Fornecimento de
Potência Elétrica Constante
Marcello Monticelli Pereira
Dissertação submetida ao Corpo Docente da Coordenação do Programa de PósGraduação de Engenharia Elétrica da Universidade Federal de Juiz de Fora como
parte dos requisitos necessários para obtenção do grau de Mestre em Ciências em
Engenharia Elétrica.
Aprovada por:
_______________________________________________
Márcio de Pinho Vinagre, D. Eng.
_______________________________________________
Júlio César Rezende Ferraz, D. Sc.
_______________________________________________
Pedro Gomes Barbosa, D. Sc.
_______________________________________________
Paulo Augusto Nepomuceno Garcia, D. Sc.
Juiz de Fora, MG - Brasil
Outubro de 2004
i
PEREIRA, MARCELLO MONTICELLI
Um
Estudo
do
Aerogerador
de
Velocidade Variável e Sua Aplicação para
Fornecimento de Potência Elétrica Constante
[Juiz de Fora] 2004
86p. 29,7cm (UFJF, M.Sc., Engenharia
Elétrica, 2004)
Dissertação – Universidade Federal de
Juiz de Fora
1. Despacho de Potência
2. Máquinas de Indução
3. Turbinas Eólicas
I.UFJF
II.Título (Série)
ii
Aos meus Pais, Sebastião César e Neuza Maria pelo apoio.
A Gilson Carvalho e Oswaldo Kaschini, CDI Automação, pelas cartas de
recomendação.
iii
Resumo da Dissertação apresentada à UFJF como parte dos requisitos necessários para
a obtenção do grau de Mestre em Engenharia Elétrica.
Um Estudo do Aerogerador de Velocidade Variável
e Sua Aplicação para Fornecimento de Potência
Elétrica Constante
Marcello Monticelli Pereira
Outubro/2004
Orientador: Márcio Pinho de Vinagre, D. Eng.
Área de Concentração: Sistemas Elétricos de Potência.
Palavras-chave: Turbina eólica, gerador de indução duplamente alimentado, despacho de
potência, conversor de tensão, modelagem, simulação.
Número de Páginas: 86.
Este Trabalho descreve uma metodologia para controlar potência ativa e reativa
despachadas para a rede elétrica a partir de geradores de indução duplamente
alimentados (GIDA) acoplados a turbinas eólicas. A metodologia utiliza o conceito de
turbinas eólicas de velocidade variável acopladas a geradores de indução duplamente
alimentados e requer a existência de uma fonte de potência disponível no rotor. Com a
utilização de um inversor de tensão e alguns controles convenientes, é possível injetar na
rede tanto potência reativa quanto potência ativa constantes. São apresentados
resultados de simulação de um GIDA ligado a uma barra infinita para ilustrar a aplicação
da metodologia.
iv
Abstract of Dissertation presented to UFJF as a partial fulfillment of the requirements for
the degree of Master of Science in Electric Engineering.
A Study of a Variable Speed Wind Turbine and Its
Application for Delivery of Constant Electric Power
Marcello Monticelli Pereira
October /2004
Supervisor: Márcio Pinho de Vinagre, D. Eng.
Concentration: Power Electric Systems.
Key Words: Wind turbine, doubly feed induction generator, power dispatch, voltage
source converter, modeling, simulation
Number of Pages: 86.
This work describes a methodology for controlling active and reactive power
delivered to a power system from a double fed induction generator (DFIG) coupled to a
wind turbine. This methodology uses a variable speed wind turbine coupled to doubly fed
induction generator, and requires a power source available for feeding the rotor circuits.
With the utilization of a voltage source inverter connected to the rotor circuits and some
suitable controls, it is possible to deliver required reactive and active power as well. Some
simulation results of a DFIG connected to an infinite bus are shown in order to illustrate
the application of the methodology.
v
Índice
ÍNDICE DE FIGURAS
IX
ÍNDICE DE TABELAS
XII
CAPÍTULO 1
1
Considerações iniciais.
1
1.
Introdução.
1
2.
Revisão bibliográfica.
4
3.
Objetivos.
6
4.
Principais contribuições do trabalho.
6
5.
Publicações oriundas deste trabalho.
6
6.
Estrutura do trabalho.
7
CAPÍTULO 2
8
Os aerogeradores.
8
1.
Introdução.
8
2.
Estado atual da energia eólica.
8
3.
Sistemas de geração.
9
4.
Sumário do capítulo.
14
CAPÍTULO 3
15
Modelagem da máquina de indução.
15
1.
Introdução.
15
2.
Modelagem da máquina de indução.
15
3.
Simulação do modelo da máquina de indução.
22
4.
Sumário do capítulo.
29
CAPÍTULO 4
30
Modelagem do inversor de freqüência.
30
1.
Introdução.
30
2.
Principio de funcionamento.
30
vi
3.
Simulação do modelo do inversor de freqüência.
32
3.1.
Espectro de freqüências do inversor modelado.
33
3.2.
Influência dos harmônicos de tensão do inversor sobre a máquina de indução.
35
3.2.1.
Sobre a elevação de temperatura.
35
3.2.2.
Sobre o rendimento.
36
3.2.3.
Características do sistema de isolamento.
36
3.3.
4.
Resultados obtidos.
36
Sumário do capítulo.
40
CAPÍTULO 5
41
Modelagem da turbina eólica.
41
1.
Introdução.
41
2.
A modelagem da velocidade do vento.
41
3.
A modelagem da turbina eólica.
44
4.
A modelagem do controle da potência mecânica.
46
5.
Simulação do modelo completo da turbina eólica.
50
6.
Sumário do capítulo.
52
CAPÍTULO 6
53
A estratégia de controle.
53
1.
Introdução.
53
2.
Formulação matemática.
53
3.
Simulações do aerogerador e do sistema de controle.
56
3.1.
Simulação I.
59
3.2.
Simulação II.
62
3.3.
Simulação III.
66
3.4.
Simulação IV.
71
4.
Sumário do capítulo.
76
CAPÍTULO 7
77
Conclusões.
77
1.
77
Considerações gerais.
vii
2.
Conclusões.
77
3.
Trabalhos futuros.
78
APÊNDICE A
80
Diagrama de blocos do modelo do aerogerador.
APÊNDICE B
80
81
Condições iniciais das variáveis de estado.
81
BIBLIOGRAFIA
83
viii
Índice de Figuras
Figura 1-Localização dos projetos eólicos outorgados no Brasil (Situação em Janeiro de 2002). ........ 3
Figura 2-Desenho esquemático de um aerogerador.......................................................................... 10
Figura 3-Principio de funcionamento básico de um aerogerador. ...................................................... 11
Figura 4-Sistemas de geração usados em aerogeradores. ............................................................... 11
Figura 5-Desenho de uma nacele de um aerogerador com a caixa de engrenagens e um gerador de
indução de rotor em gaiola ou rotor bobinado........................................................................... 13
Figura 6-Desenho de uma nacele de um aerogerador com um gerador síncrono acionado diretamente
pelo rotor da turbina eólica. ...................................................................................................... 13
Figura 7-Disposição espacial das bobinas no estator e no rotor de uma máquina de indução trifásica.
................................................................................................................................................ 16
Figura 8-Circuito equivalente da máquina de indução, dois pólos, trifásica conectada em estrela. .... 16
Figura 9-Circuitos elétricos equivalentes da máquina de indução trifásica para um sistema de
coordenadas arbitrário: (a) eixo q; (b) eixo d e (c) eixo Zero. .................................................... 20
Figura 10-Diagrama de blocos da simulação da máquina de indução trifásica e simétrica em
coordenadas qd0. .................................................................................................................... 23
Figura 11-Curvas de (a) Conjugado eletromagnético (b) Velocidade mecânica do eixo em RPM. ..... 24
Figura 12-(a) Correntes no estator da máquina de indução (b) Correntes no rotor da máquina de
indução de 3HP. ...................................................................................................................... 25
Figura 13-Curvas de (a) Potência ativa (b) Potência reativa (c) Fator de potência da máquina de
indução de 3HP. ...................................................................................................................... 26
Figura 14-(a) seqüência positiva aplicada no estator e no rotor; (b) seqüência positiva aplicada no
estator e seqüência negativa no rotor....................................................................................... 27
Figura 15-(a) seqüência negativa aplicada no estator e seqüência positiva aplicada no rotor; (b)
seqüência negativa aplicada no estator e no rotor. ................................................................... 28
Figura 16-Inversor em ponte básico.................................................................................................. 31
Figura 17-Forma de onda da tensão de saída do inversor operado por bloqueio de grupo. ............... 31
Figura 18-Forma de onda da tensão de saída do inversor operado por variação de largura de pulso
(PWM). .................................................................................................................................... 32
Figura 19-Diagrama de blocos da simulação do inversor de freqüência trifásico operado por variação
de largura de pulso (PWM)....................................................................................................... 33
Figura 20-Onda triangular versus sinal de controle para um inversor PWM....................................... 34
Figura 21-Onda triangular versus sinal de controle trifásico para um inversor PWM. ......................... 35
Figura 22-Tensões de fase na saída do inversor............................................................................... 38
Figura 23-Espectro das freqüências para as tensões de fase. .......................................................... 38
Figura 24-Tensões de linha na saída do inversor.............................................................................. 39
Figura 25-Espectro das freqüências para as tensões de linha........................................................... 39
Figura 26-Curva da velocidade do vento obtida da modelagem matemática. .................................... 43
Figura 27-Exemplo de um rotor de uma turbina eólica. ..................................................................... 44
ix
Figura 28-Exemplo de um aerogerador............................................................................................. 44
Figura 29-Forças que atuam em uma turbina eólica e a produção de conjugado. ............................. 45
Figura 30-Principio do estol. ............................................................................................................. 47
Figura 31-Curvas características do controle por estol e controle por variação do ângulo de passo das
pás........................................................................................................................................... 48
Figura 32-Curva utilizada para a geração do ângulo de referência para uma turbina eólica de 2MW. 49
Figura 33-Diagrama de blocos do controlador do ângulo de passo das pás de uma turbina eólica de
2MW. ....................................................................................................................................... 49
Figura 34-Curva de Velocidade do vento aplicada à turbina eólica de 2MW...................................... 50
Figura 35-Potência mecânica desenvolvida pela turbina eólica de 2MW. .......................................... 51
Figura 36-Conjugado mecânico gerado pela turbina eólica de 2MW. ................................................ 51
Figura 37-Variação do ângulo das pás do rotor durante a simulação................................................. 52
Figura 38-Esquema da estratégia de controle para uma aerogerador de velocidade variável com
gerador de indução duplamente alimentado. ............................................................................ 54
Figura 39-Controladores PI utilizados para processar os resíduos de potência ativa e reativa do GIDA.
................................................................................................................................................ 55
Figura 40-Diagrama de blocos da simulação da estratégia de controle da potência. ......................... 56
Figura 41-Diagrama de blocos sintetizado mostrando a interação dos diversos subsistemas que
compõe o modelo do aerogerador............................................................................................ 57
Figura 42-Exemplo de cadeia cinemática.......................................................................................... 57
Figura 43-Curvas de (a) Velocidade do vento (b) Conjugado de mecânico (c) Potência Mecânica.
Simulação I. ............................................................................................................................. 59
Figura 44-Curvas de (a) Potência ativa (b) Potência reativa (c) Fator de potência. Simulação I......... 60
Figura 45-Curvas de (a) Potência mecânica (b) Potência ativa (c) Potência no rotor. Simulação I..... 61
Figura 46-Curvas de (a) Velocidade mecânica eixo de alta rotação (b) Velocidade mecânica eixo de
baixa rotação. Simulação I. ...................................................................................................... 62
Figura 47-Curvas de (a) Potência ativa (b) Potência reativa (c) Fator de potência. Simulação II........ 63
Figura 48-Curvas de (a) Potência mecânica (b) Potência ativa (c) Potência no rotor. Simulação II.... 64
Figura 49-Curva velocidade do vento utilizada na simulação II.......................................................... 64
Figura 50-Curvas de (a) Velocidade mecânica eixo de alta rotação (b) Velocidade mecânica eixo de
baixa rotação. Simulação II. ..................................................................................................... 65
Figura 51-Diagrama de blocos que ilustra o balanço de potência no GIDA para a simulação II.......... 66
Figura 52-Curvas de (a) Potência ativa (b) Potência reativa (c) Fator de potência. Simulação III....... 67
Figura 53-Curvas de (a) Potência mecânica (b) Potência ativa (c) Potência no rotor. Simulação III. .. 68
Figura 54-Curvas de (a) Velocidade mecânica eixo de alta rotação (b) Velocidade mecânica eixo de
baixa rotação. Simulação III. .................................................................................................... 69
Figura 55-Diagrama de blocos que ilustra o balanço de potência no GIDA para a simulação III......... 70
Figura 56-Curvas de (a) Potência ativa (b) Potência reativa (c) Fator de potência. Simulação IV. ..... 71
Figura 57-Curvas de (a) Potência mecânica (b) Potência ativa (c) Potência no rotor. Simulação IV... 72
x
Figura 58-Curvas de (a) Velocidade mecânica eixo de alta rotação (b) Velocidade mecânica eixo de
baixa rotação. Simulação IV. .................................................................................................... 73
Figura 59-Diagrama de blocos que ilustra o balanço de potência no GIDA para a simulação IV no
intervalo de: (a)145s a 150s. e (b)280s a 300s ......................................................................... 74
Figura A-1-Diagrama de blocos do Simulink® utilizado na simulação do aerogerador. ...................... 80
xi
Índice de Tabelas
Tabela 1-Amplitude harmônica para as tensões de fase. .................................................................. 40
Tabela 2-Amplitude harmônica para as tensões de linha. ................................................................. 40
Tabela 3-Características da turbina eólica usada nas simulações. .................................................... 50
Tabela 4-Características da máquina de indução usada nas simulações. ......................................... 58
Tabela 5-Resultados obtidos na simulação II no intervalo de tempo entre 140s e 160s. .................... 66
Tabela 6-Características da simulação III. ........................................................................................ 67
Tabela 7-Resultados obtidos na simulação III no intervalo de tempo entre 120s e 140s. ................... 70
Tabela 8-Características da simulação IV. ........................................................................................ 71
Tabela 9-Resultados obtidos na simulação IV no intervalo de tempo entre 145s e 150s. .................. 75
Tabela 10-Resultados obtidos na simulação IV no intervalo de tempo entre 280s e 300s.................. 75
Tabela B-1-Condições iniciais das variáveis de estado para as simulações I, II, e IV. ....................... 81
Tabela B-2-Condições iniciais das variáveis de estado para a simulação III...................................... 82
xii
Capítulo 1 - Considerações Iniciais
1
Capítulo 1
Considerações iniciais.
1. Introdução.
Assim como a energia hidráulica, a energia eólica é utilizada há milhares de anos,
com a mesma finalidade: bombeamento de água, moagem de grãos e outras aplicações
que envolvem energia mecânica. Para a geração de eletricidade, as primeiras tentativas
surgiram no final do século XIX, mas somente um século depois, com a crise
internacional do petróleo (década de 70), é que houve interesse e investimentos
suficientes para viabilizar o desenvolvimento e a aplicação de equipamentos em escala
comercial.
O primeiro aerogerador comercial ligado à rede elétrica pública foi instalado em
1976, na Dinamarca. Em 2002 haviam mais de 30 mil aerogeradores em operação no
mundo. Em 1991 a Associação Européia de Energia Eólica estabeleceu como metas a
instalação de 4000MW de energia eólica na Europa até o ano 2000 e 11500MW até o
ano 2005. As metas atuais são de 75000MW na Europa até 2010. Nos estados Unidos, o
parque eólico existente é da ordem de 6400MW e prevê-se uma instalação anual de em
torno de 1500MW para os próximos anos.
O custo dos equipamentos, que era um dos principais entraves ao aproveitamento
comercial da energia eólica, caiu muito entre os anos 80 e 90, sendo que .os custos
implantação, operação e manutenção variam de acordo com o país e a existência ou não
de subsídios.
Recentes desenvolvimentos tecnológicos (sistemas avançados de transmissão,
melhor aerodinâmica, estratégias de controle e operação dos aerogeradores, etc.) tem
reduzido o custo e melhorado o desempenho e a confiabilidade dos equipamentos.
Espera-se, portanto, que a energia eólica venha a ser muito mais competitiva
economicamente na próxima década.
Segundo a AGÊNCIA NACIONAL DE ENERGIA ELÉTRICA [1], em 1990, a capacidade
instalada no mundo era inferior 2000MW. Em 1994 ela subiu para 3734MW, divididos
entre Europa, América, Ásia e outros países. Quatro anos mais tarde, chegou a
10000MW e, em 2000, a capacidade instalada no mundo já era superior a 15000MW. O
mercado tem crescido substancialmente nos últimos anos, principalmente na Alemanha,
EUA, Dinamarca e Espanha, onde a potência adicionada anualmente supera 3000MW.
Esse crescimento fez com que a Associação Européia de Energia Eólica estabelecesse
novas metas, indicando que até 2020, a energia eólica poderá suprir 10% de toda a
energia elétrica requerida no mundo. De fato, em alguns países e regiões, a energia
Capítulo 1 - Considerações Iniciais
2
eólica já representa uma parcela considerável da eletricidade produzida. Na Dinamarca,
por exemplo, a energia eólica representa 13% de toda a eletricidade gerada. Em termos
de capacidade instalada, estima-se que até 2020, a Europa já tenha instalado
100000MW.
A participação da energia eólica na geração de energia elétrica no Brasil ainda é
praticamente desprezível. Em janeiro de 2002 havia apenas seis centrais eólicas em
operação no país, perfazendo uma capacidade instalada de 18,8MW. Entre essas
centrais destacam-se Taíba e Prainha no estado do Ceará, que representam 80% do
parque eólico nacional.
De acordo com o ALDABÓ [2], o país planeja construir um parque com 1600
turbinas com capacidade média de 600kWh para geração de energia elétrica. O Brasil
possui um grande potencial eólico, confirmado pelas medições realizadas até o momento,
sendo que a região nordeste possui o maior potencial eólico do país.
Os órgãos responsáveis pela energia elétrica no país trabalham com a expectativa
de uma produção por fontes alternativas de 5645MW. Para tanto os seguintes prérequisitos técnicos e econômicos para implantação de parques eólicos da classe de MW
no Brasil devem ser satisfeitos:
•
Interesse declarado pelas concessionárias de energia elétrica, motivado,
principalmente, pela necessidade de expansão da geração de energia elétrica;
•
Diversidade das características dos projetos quanto à localização, aspectos
topográficos e características da rede;
•
Possibilidade de garantias de financiamento;
•
Desenvolvimento da indústria nacional de sistemas eólicos;
•
Estabelecimento de uma legislação favorável à disseminação da tecnologia para
geração de eletricidade em grande escala.
No entanto, a conjuntura atual do setor elétrico brasileiro tem despertado o
interesse de muitos empreendedores. Em 5 de julho de 2001, foi instituído o Programa
Emergencial de Energia Eólica (PROEÓLICA, atualmente incorporado ao PROINFA), com o
objetivo de agregar ao sistema elétrico nacional 1050MW de energia eólica. Entre outros
fatores que deverão estimular o uso da energia eólica no Brasil destaca-se o Programa
de Incentivo ao Uso de Fontes alternativas de Energia Elétrica (PROINFA).
Em janeiro de 2002, havia o registro de 38 empreendimentos eólicos autorizados
pela ANEEL, que deverão agregar ao sistema elétrico brasileiro 3338MW, o que
corresponde à cerca de 15% de todas as usinas outorgadas pela ANEEL. A grande
maioria dos projetos se localizam no litoral dos estados do Ceará e Rio Grande do Norte
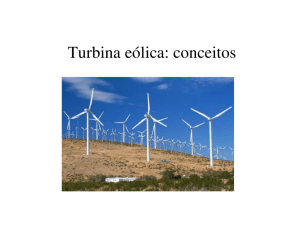
conforme mostrado na Figura 1. Observam-se, porém, projetos no interior de
Pernambuco, Bahia e no Rio de Janeiro.
Capítulo 1 - Considerações Iniciais
3
Figura 1-Localização dos projetos eólicos outorgados no Brasil (Situação em Janeiro de 2002).
Neste cenário favorável ao uso de geradores eólicos e considerando que os
investimentos se concretizem para todos os pedidos homologados, blocos significativos
de energia proveniente das usinas eólicas serão introduzidos na rede elétrica.
Como a velocidade do vento varia continuamente ao longo do tempo, ocorrerão
oscilações em baixa freqüência da potência mecânica nas turbinas eólicas e estas se
propagarão pela rede interligada em forma de potência elétrica. Quando as oscilações de
potência são pequenas, o desequilíbrio não requer a ação dos geradores de oscilação, os
quais são os reguladores do equilíbrio de potência na rede elétrica. Por outro lado, se as
oscilações forem na ordem de dezenas de MW, os geradores de oscilação ficarão
operando praticamente o tempo todo e, possivelmente, sem alcançar um regime
permanente.
Devido às oscilações de potência, os geradores de indução duplamente
alimentados (GIDA) vêm ganhando preferência para instalações de usinas eólicas de
grande porte, acima de 1MW, possuindo a vantagem de controlar o fator de potência
além de permitir a geração de potência elétrica em várias velocidades, conforme MULLER
ET ALLI
[3] e SLOOTWEG ET ALLI [4]. Além das vantagens citadas, se houver disponibilidade
de suprimento de energia a partir de uma fonte de tensão nos terminais do rotor, pode-se
obter também o controle sobre a potência ativa do estator. Segundo VINAGRE ET ALLI [5],
este controle é conveniente no sentido de diminuir as oscilações de potência ativa na
rede de distribuição. Com a estratégia de controle de potência ativa aplicada a alguns
GIDAS, poder-se-á ter um despacho de potência elétrica mais constante, o que
favorecerá a qualidade de energia elétrica do sistema de distribuição, além de retardar a
Capítulo 1 - Considerações Iniciais
4
ação dos geradores de oscilação, que poderiam vir a ser, teoricamente, os próprios
GIDAS.
A utilização do controle de potência ativa despachada pelo GIDA requer algumas
análises de operação que necessitam de modelagens detalhadas, tanto da máquina
elétrica quanto da turbina eólica. Algumas simulações devem ser feitas para que os
detalhes dinâmicos e transitórios do conjunto turbina eólica e GIDA sejam evidenciados e
estudados sob ponto de vista de operação.
Este trabalho é uma contribuição no estudo do comportamento dinâmico do
conjunto turbina eólica e GIDA, quando se objetiva o despacho de fluxo de potência
constante para a rede elétrica ligada ao estator do gerador de indução. Como requisito
básico para a aplicação do despacho constante deve-se ter uma fonte independente de
potência ligada ao rotor do GIDA. As simulações levadas em conta adotaram modelos
matemáticos detalhados da turbina eólica e do GIDA e apontaram para uma forma
alternativa de operação a qual é mais adequada a um parque de geração que possui
muitas turbinas hidráulicas, e no qual as constantes de tempo de ajustes de despacho de
carga são maiores.
2. Revisão bibliográfica.
Para a implementação da estratégia de controle proposta e modelagem dos
diversos subsistemas que envolvem este trabalho, além das referências citadas
anteriormente, realizou-se um levantamento bibliográfico o qual é resumido a seguir.
MUTSCHLER E HOFFMANN [6] fazem um comparativo entre oito tipos de
aerogeradores existentes no mercado: aerogeradores de velocidade constante,
aerogeradores de duas velocidades e aerogeradores de velocidade variável, sendo que a
potência mecânica gerada por essas máquinas pode ser regulada ou por estol passivo,
ou por estol ativo ou por variação do ângulo de passo das pás.
HOFMANN E OKAFOR [7] apresentam as vantagens de se usar um GIDA acoplado
a uma turbina eólica de grande potência em relação aos geradores síncronos de imãs
permanentes. BOGALECKA [8] propõe 3 métodos de controle para um GIDA, sendo
investigadas as possibilidades da operação em paralelo dos geradores síncronos e dos
geradores de indução duplamente alimentados.
MACHMOUM ET ALLI [9] propõe uma estratégia de controle de um GIDA acoplado a
uma turbina eólica de velocidade variável no qual é possível controlar as potências ativa
e reativa entregues a rede elétrica. LEITHEAD E CONNOR [10] investigam o controle de um
aerogerador de velocidade variável o qual emprega a regulação do ângulo de passo das
pás e o conjugado de reação do gerador elétrico para controlar a velocidade do rotor da
turbina eólica. Já em LEITHEAD ET ALLI [11] é apresentada uma formulação baseada em
Capítulo 1 - Considerações Iniciais
5
funções de transferência para a modelagem do vento, da turbina eólica e de seus
controles. NOVAK ET ALLI [12] descrevem a modelagem física, com a posterior
identificação dos parâmetros, e o equacionamento do controle de um aerogerador de
velocidade variável.
Em JANGAMSHETTI E GURUPRASADA [13] é apresentado um novo método para
identificação dos parâmetros ótimos de uma turbina eólica através de suas curvas de
potência e do coeficiente de performance de forma a se produzir a máxima potência
mecânica. SLOOTWEG ET ALLI [14] apresentam um algoritmo para inicialização dos
diversos tipos de aerogeradores em estudos dinâmicos dos sistemas de potência.
EDUARD MULIJADI E BUTTERFIELD [15] mostram dois métodos para ajustar a potência
mecânica de uma turbina eólica de velocidade variável: ajuste do ângulo de passo das
pás do rotor e o controle do carregamento do gerador.
Neste trabalho, a modelagem do vento é elaborada seguindo o equacionamento
proposto por SLOOTWEG ET ALLI [16]. Para a modelagem do inversor foi utilizada a técnica
PWM (modulação por largura de pulso). Essa técnica tem por objetivo eliminar os
componentes harmônicos de baixa ordem e permitir que o inversor trabalhe em uma faixa
de freqüência de chaveamento mais alta, conforme LANDER [17] e MOHAN ET ALLI [18]. Os
efeitos do uso dos inversores de freqüência em máquinas de indução são descritos na
referência [19].
Para a modelagem da máquina de indução foram utilizadas as equações de
enlace de fluxo descritas em KRAUSE [20] e considerados os transitórios de estator e
rotor. Os resultados obtidos através dessa modelagem foram analisados de acordo com a
teoria encontrada em FITZGERALD ET ALLI [21].
Em CARVALHO ET ALLI [22], além de serem citados os diversos tipos de turbinas
eólicas, são apresentadas as várias características do projeto das centrais eólicas e as
implicações de sua conexão às redes elétricas. SLOOTWEG E KLING [23] apresentam o que
há de mais recente na área da energia eólica, além de contextualizarem as diversas
tecnologias de aerogeradores utilizados atualmente.
ANDERSON E BOSE [24] realizaram um estudo dinâmico da turbina eólica e do
gerador elétrico utilizando um programa de estabilidade transitória. No primeiro caso
estudado o aerogerador pôde ser representado separadamente e o balanço do sistema
foi modelado por um equivalente dinâmico. No segundo caso estudado uma fazenda
eólica pôde ser representada pelo seu equivalente dinâmico.
De toda a revisão bibliográfica realizada, conclui-se que os aspectos mais
relevantes a serem considerados são: (a) as potências das turbinas são cada vez
maiores (1MW a 2MW podendo chegar até 4,5MW); (b) devido aos grandes blocos de
potência a operação de turbinas eólicas deve ser estudada sob enfoque dinâmico; (c)
6
Capítulo 1 - Considerações Iniciais
existe uma tendência do uso de turbinas eólicas de velocidade variável e do GIDA
acoplado a elas; (d) o estudo dinâmico pode incluir o aspecto transitório para análise
mais realista.
3. Objetivos.
Geralmente toda a energia que o vento pode fornecer deve ser entregue a rede
elétrica de forma a maximizar a venda da energia elétrica produzida e retornar, no menor
prazo, os custos de investimento da central eólica. Contudo se um ou vários geradores
eólicos forem usados para entregar à rede elétrica uma determinada potência ativa
definida pelo despacho, será necessário realizar o controle desse fluxo de potência.
Nesse caso supõe-se que exista uma fonte de potência independente que fornece ou
retira energia elétrica do rotor do GIDA. Esta fonte independente pode ser uma rede
secundária de energia, proveniente da própria fazenda eólica.
O presente trabalho tem três objetivos:
1. Apresentar a modelagem dinâmica necessária ao estudo da conexão com a rede
elétrica, da turbina eólica e do gerador de indução duplamente alimentado sujeitos
a ventos variáveis;
2. Propor uma estratégia de operação do sistema eólico que possibilite o despacho
de potência elétrica controlado em um valor de referência preestabelecido;
3. Validar a estratégia proposta através de simulações de casos de teste.
4. Principais contribuições do trabalho.
•
Apresentação de um modelo matemático para realização do controle da
potência a ser despachada por geradores eólicos;
•
Proposta da utilização da máquina de indução como agente regulador da
potência elétrica fornecida à rede elétrica;
•
Em sistemas com predominância de geradores hidráulicos a modelagem
proposta alivia a ação dos geradores de oscilação;
•
Melhoria da qualidade da energia entregue pelos aerogeradores ao sistema
elétrico devido à supressão das oscilações em baixa freqüência;
•
Controle do fator de potência de forma simples.
5. Publicações oriundas deste trabalho.
•
“A Strategy for Delivery of Constant Electric Power in a Doubly Fed Induction
Generator”, apresentado no 7° Congresso Brasileiro de Eletrônica de
Potência, Fortaleza, CE, Brasil, 2003.
•
“Estratégia de Controle para Fornecimento de Potência Elétrica Constante
Utilizando
Turbinas
Eólicas
e
Geradores
de
Indução
Duplamente
Capítulo 1 - Considerações Iniciais
7
alimentados”, apresentado no 15° Congresso Brasileiro de Automática,
Gramado, RS, Brasil, 2004.
6. Estrutura do trabalho.
O Capítulo 2 discorre sobre o aerogerador apresentando os aspectos construtivos
dessas máquinas e os sistemas de geração eólicos utilizados atualmente.
O Capítulo 3 trata da modelagem da máquina de indução. São mostrados os
resultados das simulações do modelo atuando como máquina de indução de rotor em
gaiola e de rotor bobinado, sendo que neste último caso o modelo foi alimentado com
fontes senoidais tanto no estator quanto no rotor.
O Capítulo 4 aborda a modelagem do inversor de freqüência. Nesse capitulo são
apresentados os resultados obtidos nas simulações e as curvas do conteúdo harmônico
gerado pelo modelo implementado.
O Capítulo 5 apresenta a modelagem matemática da turbina eólica de velocidade
variável com limitação da potência mecânica gerada através do controle de ângulo de
passo das pás e são mostrados os resultados obtidos na simulação do modelo em
questão.
O Capítulo 6 trata da estratégia de controle da potência fornecida por um
aerogerador conectado a um barramento infinito. Utilizando-se um inversor de freqüência
acoplado ao circuito do rotor do GIDA é feito o controle da potência elétrica. Os
resultados obtidos são apresentados e comentados no final desse capítulo.
O Capítulo 7 apresenta as conclusões do trabalho e sugestões para possíveis
trabalhos futuros.
No Apêndice A é apresentado o diagrama de blocos do aerogerador. Este
diagrama foi elaborado utilizando o softwear Simulink®.
No Apêndice B é apresentado um resumo das condições iniciais das variáveis de
estado, que compõe os diversos sistemas utilizados nas simulações do aerogerador.
Capítulo 2 - Os Aerogeradores
8
Capítulo 2
Os aerogeradores.
1. Introdução.
A tecnologia de aproveitamento da energia eólica vem se desenvolvendo bastante
ao longo das últimas décadas. Atualmente o aproveitamento eólico atinge até 4,5MW de
potência, fazendo que o conceito de aerogeradores de velocidade constante perca
espaço para os aerogeradores de velocidade variável.
Quanto aos aerogeradores de velocidade variável, pode-se perceber, também, a
concorrência entre as máquinas que utilizam geradores de indução duplamente
alimentados (GIDA), e as máquinas que utilizam geradores síncronos e inversores de
potência.
Este capítulo descreve algumas características destas tecnologias e suas
principais vantagens e desvantagens.
2. Estado atual da energia eólica.
Durante a última década, a produção de energia elétrica através do uso dos
ventos cresceu rapidamente o que ocasionou uma substancial evolução na área de
energia eólica. O tamanho e a potência dos novos aerogeradores introduzidos no
mercado tem aumentado significativamente nos últimos anos.
Hoje em dia, para aproveitar os bons ventos efetivamente e para concentrar
geograficamente o impacto visual dos aerogeradores, há uma tendência de agrupar os
mesmos em parques ou fazendas eólicas. Melhores que os aerogeradores isolados ou
em pequenos grupos, as fazendas eólicas com dezenas ou centenas de máquinas levam
a um aumento substancial da geração eólica.
Em países densamente povoados e perto de águas rasas, como em muitos
países do nordeste Europeu, a construção de fazendas eólicas “off shore” (fora da costa)
é considerada uma promissora opção.
As vantagens de projetos “off shore” são os reduzidos problemas de visibilidade e
ruídos, ventos constantes com altas velocidades resultando na geração de grandes
quantidades de energia elétrica. A desvantagem é o aumento dos custos, quando
comparado com as instalações feitas em terra firme. Este aumento de custo é causado
pela construção das fundações e as grandes distâncias que devem ser cobertas pelos
cabos de energia que conectam as fazendas eólicas ao sistema elétrico.
Capítulo 2 - Os Aerogeradores
9
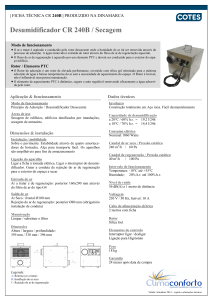
3. Sistemas de geração.
A Figura 2 mostra as principais partes componentes de um aerogerador, as quais
são descritas a seguir.
•
Nacele: Contém os componentes do aerogerador incluindo entre outros a caixa de
engrenagens e o gerador elétrico;
•
Pás do rotor: Capturam a energia existente no vento e a transfere para o cone do
rotor;
•
Cone do rotor: Liga as pás ao eixo de baixa velocidade da turbina eólica;
•
Eixo de baixa velocidade: Conecta o cone do rotor a caixa de engrenagens. Em
uma turbina moderna o eixo gira entre 9 e 30 rpm. Nesse eixo estão instaladas as
tubulações hidráulicas utilizadas para habilitar a operação do freio aerodinâmico;
•
Caixa de engrenagens: É utilizada para converter a baixa rotação e o alto
conjugado da turbina eólica em alta velocidade e mais baixo conjugado que
podem ser usados pelo gerador. Em máquinas de 600 a 750kW, por exemplo, a
relação de engrenagens é de aproximadamente 1:50;
•
Eixo de alta velocidade: Aciona o gerador elétrico. Ele pode ser equipado com um
freio a disco, usado em caso de falha do freio aerodinâmico ou na partida da
turbina eólica. No caso da Figura 2 o freio a disco está instalado no eixo de baixa
velocidade;
•
Gerador elétrico: São geralmente utilizados os geradores de indução ou os
geradores síncronos. Em aerogeradores modernos a potência dessas máquinas
está entre 500kW a 2000kW podendo atingir 4500kW;
•
Controle de giro (mecanismo yaw): É conhecido também como mecanismo de
orientação e utiliza motores elétricos para girar a nacele juntamente com o rotor
contra o vento. Este mecanismo é operado por um controlador eletrônico o qual
monitora a direção do vento usando uma veleta. Normalmente o aerogerador vai
girar alguns graus quando o vento mudar sua direção;
•
Sistema de controle: Contém um microprocessador que monitora, continuamente,
as condições do aerogerador. Em caso de um mau funcionamento (sobrecarga,
excesso de calor na caixa de engrenagens, etc) ele automaticamente dispara o
processo de parada da turbina eólica;
•
Torre: Sustenta a nacele e o rotor. Geralmente é vantajoso ter uma torre alta por
que a velocidade do vento cresce à medida que se afasta do solo. Em
aerogeradores modernos as torres podem atingir a altura de 40m a 60m. Em
termos construtivos elas podem ser tubulares ou reticuladas;
Capítulo 2 - Os Aerogeradores
•
10
Sensores de vento: São basicamente o anemômetro e a veleta. O anemômetro
mede a velocidade do vento enquanto que a veleta monitora a direção do vento.
Os sinais do anemômetro são usados pelo sistema de controle para partir o
aerogerador quando a velocidade do vento está em torno de 3,5m/s a 5m/s.
Quando esta velocidade é superior a 25m/s o sistema de controle dispara o
processo de parada do aerogerador de forma a preservá-lo mecanicamente. Já o
sinal da veleta é usado para girar o aerogerador contra o vento usando o
mecanismo de orientação.
Figura 2-Desenho esquemático de um aerogerador.
O princípio de funcionamento de um aerogerador compreende dois processos de
conversão, levados a termo pelos seguintes componentes: o rotor, que retira energia
cinética do vento e a converte em conjugado mecânico e o gerador que converte o
conjugado mecânico em eletricidade e alimenta a rede elétrica. Esse princípio de
funcionamento é descrito na Figura 3.
11
Capítulo 2 - Os Aerogeradores
Figura 3-Principio de funcionamento básico de um aerogerador.
Apesar do principio de funcionamento de um aerogerador ser fácil de entender,
essa máquina é um sistema complexo no qual áreas de conhecimento tais como
aerodinâmica, mecânica, elétrica e controle estão intimamente interligadas.
Atualmente existem três tipos principais de aerogeradores no mercado. As
principais diferenças entre eles dizem respeito ao sistema de geração e o modo como a
eficiência aerodinâmica do rotor é limitada durante as altas velocidades do vento de
maneira a prevenir sobrecargas mecânicas. Os sistemas de geração dos aerogeradores
são muito parecidos e conforme mostra a Figura 4 podem ser de três tipos:
%&'
!("#'
) *+-, '
()0 !
1 . /
!, *!,!
)
:()0 !
1 !"#
$
%3'4 !("#
( &+!2 / 5 %6 78
9
) /
!, +!,!
;
'
()0 !
1 !2$ +
%&+ <= ! !
) !2$ Figura 4-Sistemas de geração usados em aerogeradores.
Capítulo 2 - Os Aerogeradores
•
Gerador de indução de rotor em gaiola;
•
Gerador de indução duplamente alimentado (rotor bobinado);
•
Gerador síncrono acoplado diretamente ao rotor da turbina eólica;
12
O primeiro sistema de geração é o mais antigo deles. Este sistema consiste de um
gerador de indução de rotor em gaiola conectado diretamente a rede elétrica. O
escorregamento e, conseqüentemente, a velocidade variam com a quantidade de
potência gerada. A variação de velocidade, contudo, é pequena, aproximadamente 1% a
2%. Dessa forma, este tipo de sistema é chamado de velocidade constante ou
aerogerador de velocidade fixa. Deve ser mencionado que o gerador de indução de rotor
em gaiola usado em aerogeradores pode girar em duas velocidades diferentes, mas
constantes, pela mudança do número de pólos do enrolamento do estator.
O gerador de indução de rotor em gaiola sempre consome energia reativa. Na
maioria dos casos isto é particularmente indesejado por causa dos problemas de nível de
tensão no ponto de conexão devido ao fluxo de potência reativa na rede elétrica. Dessa
forma, o consumo de reativo pelo gerador de indução é compensado, em parte ou
totalmente, por capacitores.
Os outros dois sistemas de geração descritos na Figura 4 são os de velocidade
variável. Para permitir a operação em velocidade variável, a velocidade mecânica e a
freqüência da rede devem estar desacopladas. Para tanto são usados dispositivos
eletrônicos. No gerador de indução duplamente alimentado um conversor alimenta o
enrolamento trifásico do rotor. Desse modo, a freqüência mecânica e elétrica do rotor
estão desacopladas e a freqüência elétrica do estator e do rotor se equilibram,
independente da velocidade mecânica do rotor. Este sistema tem as seguintes vantagens
[3]:
•
Redução do custo do inversor, pois a potência do mesmo é da ordem de 25% da
potência total do sistema;
•
Redução do custo dos filtros, pois os mesmos são dimensionados para 25% da
potência total do sistema, e os harmônicos produzidos pelo inversor representam
apenas uma pequena fração da distorção harmônica total;
•
Ganho de eficiência de aproximadamente 2% a 3%;
•
Desacoplamento das potências ativa e reativa do gerador;
•
Implementação do controle do fator de potência, pois o conjunto gerador de
indução e inversor operam basicamente como um gerador síncrono. O inversor
fornece a potência de excitação para a máquina de indução.
No caso do gerador síncrono acoplado diretamente ao eixo da turbina eólica, o
mesmo é completamente desacoplado da rede elétrica por um dispositivo eletrônico
Capítulo 2 - Os Aerogeradores
13
conectado aos enrolamentos do estator. O gerador síncrono é excitado usando um
enrolamento de campo ou ímãs permanentes. Este sistema tem como principal vantagem
dispensar o uso da caixa de engrenagens, por outro lado ele apresenta algumas
desvantagens, tais como [3]:
•
O inversor deve ser dimensionado para suportar a potência total do sistema;
•
Como conseqüência a eficiência do inversor vai afetar a eficiência total do
sistema;
A Figura 5 mostra a nacele de um aerogerador com caixa de engrenagens e
gerador de indução (gaiola ou rotor bobinado).
Figura 5-Desenho de uma nacele de um aerogerador com a caixa de engrenagens e um gerador de
indução de rotor em gaiola ou rotor bobinado.
Já a Figura 6 mostra a nacele de um aerogerador que possuí um gerador síncrono
acionado diretamente pelo rotor da turbina eólica.
Figura 6-Desenho de uma nacele de um aerogerador com um gerador síncrono acionado
diretamente pelo rotor da turbina eólica.
Além desses 3 principais sistemas de geração existem algumas outras variações.
Uma delas é o sistema de velocidade semivariável. Neste sistema é usado um gerador
de indução de rotor em gaiola, no qual, a resistência do rotor pode ser variada por meio
de chaves eletrônicas. Variando a resistência do rotor, a curva característica de
conjugado versus velocidade do gerador é deslocada e é possível obter variações na
Capítulo 2 - Os Aerogeradores
14
velocidade do rotor da ordem de 10% da velocidade nominal. Neste sistema de geração,
a limitação na variação da velocidade é, portanto, obtida a um custo relativamente baixo.
Em outras variações são utilizados os geradores síncronos convencionais ou
geradores assíncronos de rotor em gaiola de alta velocidade, conectados ao rotor da
turbina eólica através de uma caixa de engrenagens e a rede elétrica por um conversor
eletrônico.
Deve-se notar que geradores síncronos diretamente conectados a rede elétrica, e
que estão presentes na maioria das estações de geração convencional, não são usados
nos aerogeradores. Contudo aerogeradores com geradores síncronos conectados
diretamente a rede elétrica foram construídos no passado e atualmente não são mais
utilizados. Sua característica dinâmica desfavorável quando usado com uma máquina
primária com potência flutuante, causa carregamentos estruturais grandes e risco de
instabilidade durante as rajadas de vento. Além disso, o gerador síncrono dever ser
sincronizado antes de ser conectado a rede elétrica e isso também é problemático.
4. Sumário do capítulo.
Neste capítulo foram apresentados alguns aspectos do estado atual da energia
eólica e mostrado os diversos sistemas de geração eólicos utilizados nos dias de hoje.
Além disso, foram apresentadas as vantagens e desvantagens de cada um desses
sistemas.
Capítulo 3 - Modelagem da Máquina de Indução
15
Capítulo 3
Modelagem da máquina de indução.
1. Introdução.
A máquina de indução é usada em uma grande variedade de aplicações onde se
faz necessário converter potência elétrica em mecânica. A máquina de indução mais
utilizada é a de rotor em gaiola, cujo aspecto construtivo é bem simples. Os condutores
do rotor estão curto-circuitados em cada terminal por anéis contínuos.
Utilizados em menor escala onde se faz necessário introduzir tensões externas ao
circuito do rotor, os motores de rotor bobinado são aqueles nos quais condutores de
cobre são colocados nas diversas ranhuras do rotor. Cada terminal do enrolamento é
levado a anéis coletores que são isolados do eixo do rotor. Usualmente são ligados
resistores aos anéis coletores dessas máquinas para variar a resistência total do rotor por
fase. Em operação normal, como motor, os anéis são então curto-circuitados.
O estator, para ambos os tipos de máquina de indução, pode ser de aço laminado
ou de ferro fundido. É ele quem providencia uma faixa de retorno do fluxo para o circuito
magnético criado pelos seus enrolamentos, que são constituídos de espiras de fios de
cobre. Essencialmente, essas bobinas são eletromagnetos cujos ampére-espiras
providenciam uma força magnetomotriz adequada à produção, no entreferro, do fluxo
necessário para gerar uma força mecânica.
2. Modelagem da máquina de indução.
A modelagem de máquinas de indução trifásicas em regime permanente pode ser
feita pelo equivalente monofásico. Em regime transitório o equivalente monofásico não é
adequado, pois existem condições de manutenção de enlace de fluxo que obrigam o
aparecimento de correntes assimétricas nas três fases, inviabilizando o equivalente
monofásico.
A modelagem geral pode ser feita nas variáveis abc, utilizando indutâncias
próprias e mútuas entre enrolamentos de estator e de rotor. As indutâncias mútuas são
variáveis com a posição do rotor em relação ao estator e, portanto variáveis no tempo.
Se for aplicada nas equações das tensões e enlaces de fluxo uma transformação
de variáveis abc para qd0 (com os eixos d e q girando na velocidade síncrona do campo
girante), as correntes e tensões se tornarão constantes em regime permanente e terão
freqüência reduzida durante períodos transitórios, propiciando precisão numérica com
passo de integração relativamente grande.
16
Capítulo 3 - Modelagem da Máquina de Indução
O arranjo espacial de uma máquina simétrica de indução, de dois pólos, trifásica,
ligada em estrela é mostrada na Figura 7, já a Figura 8 mostra o seu circuito equivalente.
O enrolamento do estator é senoidalmente distribuído, possui bobinas idênticas dispostas
120°, com Ns número de espiras e uma resistência equivalente igual à rs. O circuito do
rotor também é considerado como tendo enrolamentos idênticos, senoidalmente
distribuídos, com Nr número de espiras e uma resistência equivalente igual à rr.
>@?2A
G
>DG:A
CD?BA
CDG
E?
E ?FA
EG
G
C:GA
E GHA
>IG
CD?
>B?
Figura 7-Disposição espacial das bobinas no estator e no rotor de uma máquina de indução
trifásica.
Figura 8-Circuito equivalente da máquina de indução, dois pólos, trifásica conectada em estrela.
As equações de tensão que descrevem o comportamento elétrico da máquina de
indução trifásica e simétrica podem ser expressas por:
v abcs = rs i abcs +
d
J
dt
abcs
(3-1)
Capítulo 3 - Modelagem da Máquina de Indução
v abcr = rr i abcr +
d
J
dt
17
(3-2)
abcr
onde, vabcs e vabcr são os vetores das tensões de fase do estator e do rotor nas
coordenadas abc em (V), respectivamente, iabcs e iabcr são os vetores das correntes de
fase do estator e do rotor nas coordenadas abc em (A), respectivamente, rs e rr são as
matrizes diagonais com as resistências próprias dos circuitos do estator e do rotor em
(K ), respectivamente, λabcs e λabcr são os vetores dos enlaces de fluxo dos enrolamentos
do estator e do rotor em (Wb), respectivamente.
Mas conforme mencionado anteriormente os termos em (3-1) e (3-2) que contém
os enlaces de fluxo são variantes no tempo. Para eliminar esse efeito utiliza-se a
transformação de coordenadas, chamada transformação qd0. Essa transformação
permite representar as grandezas elétricas da máquina de indução (estator e rotor), num
sistema de coordenadas ortogonais d e q que giram com uma velocidade arbitrária. A
rigor pode ser usada qualquer velocidade de rotação para os eixos d e q, porém três
sistemas são mais conhecidos: (a) sistema de coordenadas estacionário, (b) sistema de
coordenadas fixado ao rotor e (c) sistema de coordenadas síncrono fixado ao campo
girante síncrono. Este último é o mais usado no estudo e modelagem das máquinas de
indução simétricas.
As equações (3-1) e (3-2) submetidas á transformação abc para qd0, terão
expressões mais simples com coeficientes constantes dadas por:
v qd 0 s = rs i qd 0 s + ω L
qds
'
v 'qd 0 r = rr' i qd
0 r + (ω − ωr ) M
onde:
(
(
W
R
N
P
T
dqs ) = λds
U
S
) = λdr'
'
T
dqr
+
d
L
dt
'
qdr
(3-3)
qd 0 s
d
M
dt
+
'
qd 0 r
(3-4)
O
−λqs
0
−λqr'
0
Q
(3-5)
T
V
(3-6)
Sendo que os índices d e q representam as grandezas elétricas do estator e do
rotor no novo sistema de coordenadas. O símbolo (´) associado às grandezas elétricas do
rotor indica que as variáveis estão referidas ao circuito do estator. A velocidade angular
do sistema de coordenadas qd0 é dada por X
e a velocidade angular elétrica do rotor é
dada por X r, sendo que ambas as velocidades são dadas em (rad/s).
Reescrevendo as equações em sua forma expandida, têm-se:
18
Capítulo 3 - Modelagem da Máquina de Indução
vqs = rs iqs + ωλds +
d
λqs
dt
(3-7)
vds = rs ids − ωλqs +
d
λds
dt
(3-8)
d
λ0 s
dt
v0 s = rs i0 s +
(3-9)
vqr' = rr'iqr' + (ω − ωr )λdr' +
d '
λqr
dt
(3-10)
vdr' = rr'idr' − (ω − ωr )λqr' +
d '
λdr
dt
(3-11)
v0' r = rr'i0' r +
d '
λ0 r
dt
(3-12)
onde os enlaces de fluxo são dados por:
λqs = Lls iqs + M (iqs + iqr' )
(3-13)
λds = Lls ids + M (ids + idr' )
(3-14)
λ0 s = Lls i0 s
(3-15)
λqr' = L'lr iqr' + M (iqs + iqr' )
(3-16)
λdr' = L'lr idr' + M (ids + idr' )
(3-17)
λ0' r = L'lr i0' r
(3-18)
Mas desde que os parâmetros da máquina são geralmente dados em ohms ou
então em p.u., é conveniente expressar as equações de tensão e de enlace de fluxo em
termos de suas reatâncias. Fazendo Y = Z
vqs = rs iqs +
b[
, as equações (3-7) a (3-12) tornam-se:
ω
1 d
ψ ds +
ψ qs
ωb
ωb dt
(3-19)
Capítulo 3 - Modelagem da Máquina de Indução
vds = rs ids −
ω
1 d
ψ qs +
ψ ds
ωb
ωb dt
v0 s = rs i0 s
vqr' = rr'iqr' +
vdr' = rr'idr' −
1 d
ψ 0s
ωb dt
(ω − ωr )
ωb
(ω − ωr )
ωb
v0' r = rr'i0' r +
onde \
b
19
(3-20)
(3-21)
ψ dr' +
1 d '
ψ qr
ωb dt
(3-22)
ψ qr' +
1 d '
ψ dr
ωb dt
(3-23)
1 d '
ψ 0r
ωb dt
(3-24)
é a velocidade angular elétrica base em (rad/s), que é usada para calcular a
reatâncias indutivas. Os enlaces de fluxo das equações (3-13) a (3-18), são agora os
enlaces por segundo com unidades de tensão.
ψ qs = X ls iqs + X M (iqs + iqr' )
(3-25)
ψ ds = X ls ids + X M (ids + idr' )
(3-26)
ψ 0 s = X ls i0 s
(3-27)
ψ qr' = X lr' iqr' + X M (iqs + iqr' )
(3-28)
ψ dr' = X lr' idr' + X M (ids + idr' )
(3-29)
ψ 0' r = X lr' i0' r
(3-30)
A Figura 9 mostra os circuitos elétricos equivalentes, nas coordenadas qd0,
obtidos a partir das equações (3-7) a (3-18) para a máquina de indução trifásica
simétrica. Pode-se observar que os circuitos dos eixos q e d estão acoplados através de
quatro fontes de tensão controladas, as quais dependem da velocidade angular do
sistema de coordenadas, da velocidade do rotor e dos fluxos enlaçados pelas bobinas
dos eixos q e d. Essas fontes controladas são denominadas como tensões de velocidade.
20
Capítulo 3 - Modelagem da Máquina de Indução
Figura 9-Circuitos elétricos equivalentes da máquina de indução trifásica para um sistema de
coordenadas arbitrário: (a) eixo q; (b) eixo d e (c) eixo Zero.
A fim de descrever completamente o funcionamento da máquina de indução, é
necessário introduzir as equações relacionadas com os fenômenos mecânicos que
ocorrem na dinâmica da máquina. Dessa forma:
]
^ ]
^
3_ P `_ 1 `
Te = a b a
b (ψ ds iqs −ψ qs ids )
2 2 ωb
(3-31)
d
1
ωm = ( Te − Tm )
dt
J
(3-32)
onde, Te é o conjugado eletromagnético desenvolvido pela máquina em (N.m), Tm é o
conjugado mecânico aplicado no eixo do rotor em (N.m); P é o número de pólos da
máquina de indução; \
m
é a velocidade mecânica do eixo do rotor em (rad/s) e J é a
inércia do rotor em (kg.m2).
21
Capítulo 3 - Modelagem da Máquina de Indução
Freqüentemente é conveniente trabalhar com os parâmetros e variáveis em p.u.
Escolhendo-se a potência base e a tensão base adequadamente, todas as variáveis e
todos os parâmetros da máquina podem ser normalizados usando essas quantidades
bases. Se a máquina de indução é considerada operando isoladamente sua potência
nominal em (VA) é selecionada como potência base. Se esta máquina faz parte de um
sistema de potência, então a sua potência base deve ser aquela escolhida como a
potência base de todo o sistema. Aqui consideramos que a máquina de indução está
funcionando sozinha e sua potência nominal será escolhida como potência base.
Como as equações de tensão e de enlace de fluxo por segundo não mudam de
forma quando normalizadas, a equação de conjugado é modificada pelo processo de
normalização. Para o nosso propósito o conjugado base pode ser expresso pela seguinte
relação:
TB =
onde \
b
PB
( 2 P ) ωb
(3-33)
corresponde a freqüência base ou nominal da máquina de indução, PB é a
potência nominal da máquina de indução e por isso o conjugado base TB não será o
conjugado nominal.
No caso de uma máquina de indução a potência nominal acontece em uma
velocidade (velocidade nominal) ligeiramente menor que a velocidade síncrona. Por isso
o conjugado base deve ser menor que o conjugado nominal.
Se as variáveis elétricas estão em Volts, Ampéres e em Watts então a inércia do
rotor pode ser dada em unidades do mks. Se, contudo, o sistema por unidade for usado a
inércia do rotor deverá ser dada em segundos.
Para normalizar a equação (3-32), ela será dividida pelo conjugado base e a
velocidade mecânica do rotor será normalizada pela velocidade base \
(Te − Tm ) =
J ( 2 P ) ωb d ωm
TB
dt ωb
b.
Dessa forma:
(3-34)
Mas por definição, a constante de inércia dada em segundos é:
H=
cedfc
g 1 hHg
iejfi
2
d
cedfc
d
2 h J ωb g 1 hHg 2 h J ωb2
j
= iejfi j
P TB
2 P
PB
2
(3-35)
Dessa forma a equação (3-32) normalizada se torna:
(Te − Tm ) = 2 H
d ωm
dt ωb
(3-36)
Finalizando a modelagem da máquina de indução serão definidas as equações
para potência ativa e potência reativa utilizando as coordenadas qd0. Pode-se mostrar
22
Capítulo 3 - Modelagem da Máquina de Indução
que a potência ativa e a potência reativa que são consumidas por uma máquina de
indução são dadas por:
3
P = (vds ids + vqs iqs + vdr' idr' + vqr' iqr' )
2
(3-37)
3
(vqs ids − vds iqs + vqr' idr' − vdr' iqr' )
2
(3-38)
Q=
Substituindo (3-7), (3-8), (3-10) e (3-11) em (3-37) e (3-38) e desprezando as
parcelas que contém as derivadas, chegamos às seguintes expressões de potência:
P=
3
(rs (ids2 + iqs2 ) + rr' (idr'2 + iqr'2 ) − ω Mids iqr' + ω Miqs idr' − ωm Miqs idr' + ωm Mids iqr' )
2
(3-39)
3
Q = ((ω Lls + ω M )(ids2 + iqs2 ) + (ω M + ωm M )(ids idr' + iqs iqr' ) + (ωm L'lr + ωm M )(idr'2 + iqr'2 ))
2
(3-40)
ωm = ω − ωr
(3-41)
onde em (3-39) rs (ids2 + iqs2 ) representa a potência ativa dissipada na resistência do
estator, rr' (idr'2 + iqr'2 ) representa a potência ativa dissipada na resistência refletida do rotor
e ω Miqsidr' − ω Mids iqr' + ωm Mids iqr' − ωm Miqs idr'
representa a parcela de potência ativa
convertida, sendo que a unidade da potência ativa é dada em Watts.
Em (3-40) ω Lls (ids2 + iqs2 ) e ωm L'lr (idr'2 + iqr'2 ) representam a potência reativa na
indutância dispersão do estator devido a circulação das correntes de estator e a potência
reativa na indutância dispersão do rotor devido a circulação das correntes de rotor
respectivamente, ω M (ids2 + iqs2 ) e ωm M (idr'2 + iqr'2 ) representam a potência reativa da
indutância de magnetização devido a circulação das correntes de estator e devido a
circulação das correntes de rotor respectivamente e (ω M + ωm M )(ids idr' + iqs iqr' ) representa
a potência reativa na indutância de magnetização devido a interação entre as correntes
que circulam no estator e no rotor, sendo que a unidade da potência reativa é dada em
VAr.
3. Simulação do modelo da máquina de indução.
A Figura 10 mostra o diagrama de blocos usado para simular no tempo o
comportamento da máquina de indução. Observando o diagrama de blocos pode-se
entender como são computadas as tensões elétricas, as quais são transformadas em
coordenadas qd0 através das matrizes Ks (matriz de transformação das variáveis do
estator) e Kr (matriz de transformação das variáveis do rotor), as correntes elétricas, as
quais são transformadas em coordenadas abc através das matrizes (Ks)-1 (matriz de
Capítulo 3 - Modelagem da Máquina de Indução
23
transformação inversa das variáveis do estator) e (Kr)-1 (matriz de transformação inversa
das variáveis do rotor) e as grandezas mecânicas bem como sua seqüência de cálculo.
Esse diagrama é a síntese do procedimento usado para a simulação da máquina de
indução de rotor em gaiola e da máquina de indução de rotor bobinado.
Figura 10-Diagrama de blocos da simulação da máquina de indução trifásica e simétrica em
coordenadas qd0.
Para avaliar os resultados obtidos com a modelagem realizada, foram simuladas
as diversas características de uma máquina de indução de rotor em gaiola, a vazio,
alimentada por uma fonte de tensão trifásica e equilibrada pelos terminais do estator.
Posteriormente foi simulada a característica de aceleração para uma máquina de indução
de rotor bobinado, a vazio, sendo que a mesma foi alimentada simultaneamente por duas
fontes de tensão trifásicas e equilibradas. Uma fonte de tensão é aplicada aos terminais
do estator e a outra fonte de tensão alimenta os terminais do rotor.
A máquina utilizada nos testes tem as seguintes características: 4 pólos, 3 HP,
220 V; 1710 RPM; rs = 0,435 Ω; Lls = 2,0 mH; r’r = 0,816 Ω; L’lr = 2,0 mH; M = 69,3 mH e
J = 0,089 kg.m2 , sendo que estes dados se encontram em [20]. A Figura 11, a Figura 12
e a Figura 13 mostram as curvas de conjugado eletromagnético , velocidade mecânica,
correntes de estator e correntes de rotor, respectivamente para a máquina de indução de
rotor em gaiola funcionando a vazio.
24
Capítulo 3 - Modelagem da Máquina de Indução
Conjugado eletromagnetico
140
120
100
80
T
elem
(N.m)
60
40
20
0
-20
-40
0
0.5
1
1.5
1
1.5
tempo(s)
(a)
Velocidade mecanica
2000
1800
1600
1400
RPMmec
1200
1000
800
600
400
200
0
0
0.5
tempo(s)
(b)
Figura 11-Curvas de (a) Conjugado eletromagnético (b) Velocidade mecânica do eixo em RPM.
As características de funcionamento normal de uma máquina de indução de rotor
em gaiola ocorrem no intervalo entre o funcionamento a vazio e à plena carga. Aqui
vamos considerar o comportamento do rotor de uma máquina de indução na sua
velocidade a vazio, que é levemente inferior à síncrona (Figura 11b).
25
Capítulo 3 - Modelagem da Máquina de Indução
Correntes estatoricas
100
ias (A)
50
0
-50
-100
0
0.5
1
1.5
0
0.5
1
1.5
0
0.5
1
1.5
100
ibs (A)
50
0
-50
-100
100
ic s (A)
50
0
-50
-100
tempo(s)
(a)
Correntes rotoricas
100
iar (A)
50
0
-50
-100
0
0.5
1
1.5
0
0.5
1
1.5
0
0.5
1
1.5
100
ibr (A)
50
0
-50
-100
100
icr (A)
50
0
-50
-100
tempo(s)
(b)
Figura 12-(a) Correntes no estator da máquina de indução (b) Correntes no rotor da máquina de
indução de 3HP.
A vazio o escorregamento é muito pequeno e a freqüência do rotor, sua reatância
e sua fem induzida são todas muito pequenas. Conseqüentemente a corrente do rotor é
apenas suficiente para produzir o conjugado necessário a vazio (Figura 11a e Figura
12b). Desde que a corrente do rotor é pequena, a corrente do estator é a soma fasorial
de sua corrente de excitação e de uma componente primária de carga, induzida no rotor
por ação de transformador (Figura 12a). O fator de potência é pequeno e em atraso,
como pode ser visto na Figura 13(c).
26
Capítulo 3 - Modelagem da Máquina de Indução
Potencia ativa, reativa e fator de potencia
da maquina de indução a vazio
4
P motor (W)
2
1.5
1
0.5
0
3
Qmotor (VAr)
x 10
(a)
0
4
x 10
0.5
1
1.5
0
0.5
1
1.5
2
1
(b)
0
Fator de Potencia
a vazio
1
0.5
(c)
0
0
0.5
1
1.5
tempo(s)
Figura 13-Curvas de (a) Potência ativa (b) Potência reativa (c) Fator de potência da máquina de
indução de 3HP.
Outra simulação realizada para a verificação do modelo foi aquela na qual fontes
senoidais foram inseridas no circuito do rotor da máquina de indução. A freqüência
dessas tensões tem o valor da velocidade de escorregamento e a velocidade angular
mecânica do rotor pode ser determinada pela seguinte equação:
ωr =
onde k
r
2π
( fsin c ± f rotor )
P
(3-42)
é a velocidade mecânica do rotor em rad/s, P é o número de par de pólos da
máquina de indução, fsinc é a freqüência síncrona (60Hz) e frotor é a freqüência do rotor em
Hz.
Dessa forma obtém-se a freqüência elétrica do rotor, a qual será usada para
compor as tensões que serão aplicadas nos enrolamentos do rotor da máquina de
indução.
As curvas obtidas dizem respeito à característica de aceleração da máquina de
indução funcionando a vazio e com tensões aplicadas no rotor na freqüência de 3Hz, o
que corresponde a um escorregamento de ±5%. Abaixo temos os valores das tensões
aplicadas no rotor da máquina de indução:
var = 15sin ωr t
vbr = 15sin(ωr t − 2π / 3)
vcr = 15sin(ωr t + 2π / 3)
(3-43)
27
Capítulo 3 - Modelagem da Máquina de Indução
As tensões trifásicas aplicadas no estator e no rotor da máquina de indução tem
as seguintes características:
•
Tensões de estator e tensões de rotor de seqüência positiva;
•
Tensões de estator de seqüência positiva e tensões de rotor de seqüência
negativa;
•
Tensões de estator de seqüência negativa e tensões de rotor de seqüência
positiva;
•
Tensões de estator e tensões de rotor de seqüência negativa.
Velocidade mecanica
Tensoes de sequencia positiva aplicadas no estator e no rotor
1910
1710
1510
1310
RPMmec
1110
910
710
510
310
110
0
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
(a)
tempo(s)
Velocidade mecanica -Tensao de sequencia positiva aplicada no estator e
Tensao de sequencia negativa aplicada no rotor
2090
1890
1690
1490
RPMmec
1290
1090
890
690
490
290
90
-110
0
0.2
0.4
0.6
0.8
1
tempo(s)
1.2
1.4
1.6
1.8
2
(b)
Figura 14-(a) seqüência positiva aplicada no estator e no rotor; (b) seqüência positiva aplicada no
estator e seqüência negativa no rotor.
28
Capítulo 3 - Modelagem da Máquina de Indução
Conforme (3-42), quando o campo girante do estator e o campo girante do rotor
tem o mesmo sentido (mesma seqüência) a velocidade mecânica do eixo será a
diferença entre ambas as velocidades, conforme mostra a Figura 14(a) e a Figura 15(b).
Quando o campo girante do estator e o campo girante do rotor têm sentidos opostos
(seqüência oposta), a velocidade mecânica do eixo será a soma de ambas as
velocidades, conforme mostra a Figura 14(b) e a Figura 15(a).
Velocidade mecanica -Tensao de sequencia negativa aplicada no estator e
Tensao de sequencia positiva aplicada no rotor
110
-90
-290
-490
RPMmec
-690
-890
-1090
-1290
-1490
-1690
-1890
-2090
0
0.2
0.4
0.6
0.8
1
tempo(s)
1.2
1.4
1.6
1.8
2
(a)
Velocidade mecanica
Tensoes de sequencia negativa aplicada no estator e no rotor
90
-110
-310
-510
RPMmec
-710
-910
-1110
-1310
-1510
-1710
-1910
0
0.2
0.4
0.6
0.8
1
tempo(s)
1.2
1.4
1.6
1.8
2
(b)
Figura 15-(a) seqüência negativa aplicada no estator e seqüência positiva aplicada no rotor; (b)
seqüência negativa aplicada no estator e no rotor.
Capítulo 3 - Modelagem da Máquina de Indução
29
4. Sumário do capítulo.
Neste capítulo foi apresentado o equacionamento do modelo da máquina de
indução que será usado para investigar a proposta de controle da potência entregue a
rede elétrica por um gerador eólico.
Após apresentação do modelo utilizando enlace de fluxo como variáveis de
estado, foram efetuados alguns testes com a posterior análise dos resultados.
As curvas da máquina de indução funcionando a vazio, aqui obtidas, são muito
semelhantes as que se encontram em [20] e [21] e estão em conformidade com os
princípios básicos de funcionamento de uma máquina de indução, trifásica e simétrica.
30
Capítulo 4 - Modelagem do Inversor de Freqüência
Capítulo 4
Modelagem do inversor de freqüência.
1. Introdução.
A conversão de freqüência abrange os métodos pelos quais é possível tomar uma
fonte de freqüência fixa ou de corrente contínua e converter essa energia para alimentar
uma carga com uma freqüência diferente ou variável.
Os inversores de tensão são circuitos que, tendo uma fonte de tensão contínua,
possibilitam sintetizar uma tensão alternada usada para alimentar uma carga CA. Duas
estratégias principais podem ser utilizadas para controlar as tensões sintetizadas por um
inversor de tensão (a) Onda-retangular e (b) PWM (Pulse Width Modulation).
Apesar da tecnologia dos inversores ser largamente difundida em aplicações
envolvendo
acionamentos
de
motores
elétricos,
seus
princípios
básicos
de
funcionamento e controle serão apresentados com o objetivo de facilitar o seu
entendimento na aplicação a este trabalho.
2. Principio de funcionamento.
O circuito básico de um inversor em ponte é mostrado na Figura 16. Aqui os
circuitos de comutação foram omitidos para simplificar a explicação de sua operação. Em
sua topologia trifásica, este conversor é composto de seis chaves autocomutadas com
seis diodos conectados em antiparalelo. Na Figura 16, as chaves são GTOs (Gate Turnoff Thyristors), contudo nada impede que sejam usados IGBTS (Insulated Gate Bipolar
Transistors) ou MOFESTS (Metal Oxide Semiconductor Field Effect Transistor) de
potência. Os diodos conectados em antiparalelo com cada GTO são necessários para
garantir que as chaves semicondutoras do inversor sejam bidirecionais em corrente.
Dessa forma, os fluxos de potência ativa e reativa podem ser bidirecionais, ou seja,
positivos ou negativos.
O inversor mostrado na Figura 16 pode ser controlado de forma que cada GTO
conduza 180° do ciclo de saída, sendo assim, supõe-se que ao final de cada período de
180° um circuito de comutação desliga o GTO apropriado.
Considerando os GTOS como chaves, a fonte de corrente contínua é chaveada
para sintetizar a saída trifásica. A taxa na qual os GTOS são chaveados determina a
freqüência da carga. A forma de onda em degraus para uma dada tensão de linha será
modificada se qualquer indutância estiver presente na carga, pois a transferência da
corrente de carga para os diodos manterá os GTOs conduzindo por um período diferente
de 180°.
31
Capítulo 4 - Modelagem do Inversor de Freqüência
pqr
n:o
lm
Figura 16-Inversor em ponte básico.
A forma de onda do sinal de tensão alternada sintetizada pelo inversor terá a
forma da Figura 17, onde Vd é o valor de tensão da fonte CC. Neste esquema de
chaveamento os semicondutores estarão sujeitos a um menor desgaste devido ao menor
número de chaveamentos. Contudo essa estratégia tem como desvantagem a geração
de um maior conteúdo harmônico em baixas freqüências.
Figura 17-Forma de onda da tensão de saída do inversor operado por bloqueio de grupo.
Os inversores têm como fonte de alimentação uma fonte contínua de tensão
constante. Na prática, os inversores caem em duas categorias: tensão constante ou
corrente constante. O significado do termo tensão constante enfatiza que, sob o curto
intervalo de tempo de um ciclo da forma de onda CA de saída, qualquer variação de
tensão da fonte contínua é desprezível. A fonte de tensão contínua quase sempre será
derivada de um retificador com um grande capacitor colocado sobre a linha de entrada
CC para o inversor. O papel do capacitor é garantir que transitórios e eventos dos
chaveamentos dentro do inversor não mudem significativamente a tensão da linha CC,
sendo o capacitor uma fonte ou fornecedor de energia elétrica, carregando ou
descarregando o necessário para evitar uma rápida variação de tensão.
Outra característica dos inversores é que usando redes de comutação com
componentes em estado sólido de potência, limita-se a freqüência de comutação do
inversor em valores mais altos. O objetivo do uso de chaveamentos mais rápidos não é
apenas permitir ao inversor fornecer uma faixa maior de freqüências, mas principalmente
habilitar o inversor a ser controlado no modo PWM. Quanto mais chaveamentos forem
Capítulo 4 - Modelagem do Inversor de Freqüência
32
feitos dentro de cada ciclo, mais harmônicos de baixa ordem podem ser eliminados. Se
forem eliminados os harmônicos de baixa ordem, menor será o filtro a ser empregado
para converter a forma de onda em degraus em uma senóide. Uma carga, como uma
máquina de indução, altamente indutiva atenuará os harmônicos de alta ordem
naturalmente, resultando em uma corrente da máquina de indução quase senoidal. Neste
caso a forma de onda do sinal de tensão alternada sintetizada pelo inversor terá a forma
da Figura 18.
Figura 18-Forma de onda da tensão de saída do inversor operado por variação de largura de pulso
(PWM).
3. Simulação do modelo do inversor de freqüência.
O inversor modelado é trifásico, síncrono, operado através de variação de largura
de pulso (PWM). A amplitude (modulação), a fase e a freqüência do sinal de referência
são escolhidas para se obter controle do sinal de saída da ponte de inversores. Os pulsos
que comutam os dispositivos de um braço da ponte são complementares um do outro.
Uma onda triangular é comparada com o sinal senoidal de referência e em cada instante
de tempo o sinal de referência se torna maior ou menor que o sinal da onda triangular, o
valor dos pulsos passam de zero para um, ou de um para zero, dependendo do seu valor
prévio. Dessa forma o pulso dois é complementar do pulso um, o pulso quatro é
complementar do pulso três e o pulso seis é complementar do pulso cinco.
Os dispositivos de estado sólido foram supostos ideais e modelados como se
fossem chaves. A cada transição de zero para um e vice-versa essas chaves são
comutadas, gerando os pulsos que vão sintetizar a tensão desejada na saída do inversor.
Na Figura 19 é mostrado o diagrama de blocos usado para simular no tempo o
comportamento do inversor de freqüência. Observando esse diagrama de blocos, podese entender como são computadas as grandezas elétricas bem como sua seqüência de
calculo.
Capítulo 4 - Modelagem do Inversor de Freqüência
33
Figura 19-Diagrama de blocos da simulação do inversor de freqüência trifásico operado por variação
de largura de pulso (PWM).
3.1. Espectro de freqüências do inversor modelado.
O objetivo desta seção é verificar o espectro de freqüência dos sinais de saída do
inversor PWM para se determinar quais harmônicos estão presentes nesses sinais e
suas magnitudes.
Antes de apresentarmos os resultados obtidos, é necessário definir alguns termos.
A onda triangular VTri, mostrada na Figura 20, está na freqüência de chaveamento fs, a
qual estabelece a freqüência com que os dispositivos de estado sólido serão comutados.
O sinal de controle Vcontrol é usado para modular a comutação e tem a freqüência
fundamental desejada f1. O índice de modulação de amplitude m é definido como sendo:
m=
Vcontrol
Vtri
(4-1)
Onde Vcontrol é o valor de pico do sinal de controle e Vtri é o valor de pico da onda
triangular, o qual é mantido constante. O índice de modulação de freqüência é definido
como sendo:
mf =
fs
f1
(4-2)
O valor de pico da componente fundamental da tensão de fase é dado por:
VAo =
Vcontrol Vd
×
Vtri
2
onde Vcontrol ≤ Vtri
(4-3)
34
Capítulo 4 - Modelagem do Inversor de Freqüência
Onda triangular x Onda de tensao de controle
200
V tri
V control
150
100
Amplitude (V)
50
0
-50
-100
-150
-200
0
0.002
0.004
0.006
0.008
0.01
tempo(s)
0.012
0.014
0.016
0.018
0.02
Figura 20-Onda triangular versus sinal de controle para um inversor PWM.
Aqui Vcontrol é escolhido como sendo senoidal para prover a saída com um sinal
também senoidal e com pouco conteúdo harmônico. Dessa forma, de acordo com [18],
temos que:
(VAo )1 = m
Vd
m ≤1
2
(4-4)
Isto nos mostra que a amplitude da componente fundamental varia linearmente
com o índice de modulação de amplitude (m s 1). O intervalo do índice de modulação que
vai de zero até um é chamado de intervalo linear.
Com relação à seleção da freqüência de chaveamento é desejável usar a maior
freqüência de chaveamento possível, mas na prática isso não é possível devido às
perdas de chaveamento, as quais são proporcionais à freqüência de chaveamento.
Contudo, em muitas aplicações essa freqüência é escolhida na faixa que compreende
valores menores que 6kHz e maiores que 20kHz. As freqüências menores que 6kHz são
utilizadas em aplicações típicas de 50 ou 60Hz e as freqüências maiores que 20kHz são
usadas por estarem acima do limite audível.
Similar aos inversores monofásicos, o objetivo do inversor trifásico baseado em
PWM é controlar tensões trifásicas na saída do inversor em modulo e freqüência através
de uma tensão de entrada praticamente constante. Para sintetizar as tensões trifásicas
equilibradas em um inversor trifásico PWM, uma única onda triangular é comparada com
as tensões de controle trifásicas, conforme mostra a Figura 21.
35
Capítulo 4 - Modelagem do Inversor de Freqüência
Onda triangular x Tensao trifasica de contrrole
200
Vtri
V
ctrla
Vctrlb
150
V
ctrlc
100
Amplitude (V)
50
0
-50
-100
-150
-200
0
0.002
0.004
0.006
0.008
0.01
tempo(s)
0.012
0.014
0.016
0.018
0.02
Figura 21-Onda triangular versus sinal de controle trifásico para um inversor PWM.
Na região linear (m s 1) a componente fundamental da tensão da saída varia
linearmente com o índice de modulação de amplitude. Nesse caso o valor de pico da
componente fundamental em um ramo do inversor é dado por (4-4). Dessa forma a
componente fundamental da tensão de linha é dada por:
Vl = 3
m
Vd
2
(4-5)
Onde m é a modulação de amplitude e Vd é a tensão continua que alimenta o inversor.
3.2. Influência dos harmônicos de tensão do inversor
sobre a máquina de indução.
Algumas vezes deve-se considerar as influências dos harmônicos de tensão do
inversor. Estes influenciam o comportamento térmico, o rendimento, e o sistema de
isolamento da máquina de indução, entre outras características.
3.2.1. Sobre a elevação de temperatura.
Correntes harmônicas são introduzidas quando as tensões de linha aplicadas a
uma máquina de indução polifásica apresentam componentes de tensão em freqüências
diferentes da freqüência nominal (ou fundamental) da fonte. As perdas por efeito Joule no
enrolamento do estator de máquinas de indução causadas pelos harmônicos de corrente
tendem a aumentar a temperatura de estabilização térmica dessas máquinas e reduzir o
seu rendimento. Para evitar o seu sobre-aquecimento, deve-se reduzir o conjugado
nominal a fim de manter a temperatura dentro do limite da classe térmica. Outra maneira
é sobre-dimensionar a máquina de indução. Evidentemente, o comportamento térmico é
diferente para cada tipo de máquina e de inversor. Pode-se, no entanto, relacionar a
Capítulo 4 - Modelagem do Inversor de Freqüência
36
redução no conjugado eletromagnético como uma função do fator de harmônicos de
tensão. Essa relação, segundo [19], é chamada de derating factor.
3.2.2. Sobre o rendimento.
O rendimento de uma máquina de indução alimentada por um inversor de
freqüência diminui devido ao aumento das perdas causadas pelas correntes harmônicas
no enrolamento da mesma. De acordo com [19] pode-se determinar, de forma
aproximada, o novo rendimento da máquina de indução em função do fator de redução
do conjugado através da seguinte equação:
ηc =
DFH 2
1
η
onde, t
+ DFH 2 − 1
(4-6)
é o rendimento da máquina de indução alimentada por fonte senoidal sem
conteúdo harmônico; t
c
é o rendimento da máquina alimentada por inversor de
freqüência e DFH é o fator de redução do conjugado em função do conteúdo de
harmônicos.
3.2.3. Características do sistema de isolamento.
O sistema de isolamento de uma máquina de indução, quando alimentado por
inversor de freqüência, fica submetido a uma multiplicidade de fatores adversos que
podem levá-lo à ruptura de sua integridade dielétrica, ou seja, podem provocar o
rompimento do dielétrico isolante, levando a máquina à falha prematura. A degradação
do sistema isolante pode ocorrer devido a causas térmicas, elétricas ou mecânicas, ou
por uma combinação de todos estes fatores. Com o uso generalizado de máquinas de
indução acionadas por inversores de freqüência, o foco do problema tem se voltado,
sobretudo para a suportabildade do isolante quando os mesmos ficam submetidos aos
altos picos de tensão, provocados pela rapidez do crescimento dos pulsos gerados pelo
inversor, bem como pela alta freqüência com que estes picos são produzidos. Devido aos
efeitos citados acima o sistema de isolamento convencional, usado em fontes senoidais
de 50/60Hz, pode não atender aos requisitos necessários quando o motor é alimentado
por inversores de freqüência.
3.3. Resultados obtidos.
A seguir são apresentados os resultados obtidos na avaliação dos harmônicos
gerados pelo inversor modelado. São mostradas as curvas das tensões de fase
sintetizadas pelo inversor e seu espectro de freqüência. Logo após são mostradas as
tensões de linha e o espectro de freqüência obtido.
Capítulo 4 - Modelagem do Inversor de Freqüência
37
Para se obter os espectros de freqüência o inversor foi parametrizado da seguinte
forma:
•
Fonte de tensão continua: 175V;
•
Índice de modulação de amplitude: 0,80;
•
Freqüência do sinal de saída: 60Hz;
•
Freqüência da onda triangular: 2340Hz;
•
Índice de modulação de freqüência: 39.
Foi utilizado um passo fixo de 1,669 x 10-6 para a simulação do inversor, o que
proporcionou a geração de 59905 pontos, com uma resolução de 256 pontos por passo.
Conforme podemos observar na Figura 23 e na Figura 25, a componente que se
sobressai é a fundamental na freqüência de 60Hz, cuja amplitude harmônica média é da
ordem de 70V para as tensões de fase, Figura 23, e de 121,27V para as tensões de
linha, Figura 25.
São mostrados os valores das amplitudes harmônicas para as tensões de fase na
Tabela 1 e a Tabela 2 apresenta os valores das amplitudes harmônicas para as tensões
de linha. Nessas tabelas são comparados os valores teóricos, calculados a partir das
formulações existentes em [18], com os resultados obtidos durante as simulações
Pelos resultados encontrados podemos observar que o modelo do inversor
implementado utilizando altas freqüências de chaveamento permite que os harmônicos
de baixa ordem sejam atenuados e/ou eliminados, cumprindo assim um dos objetivos
principais do controle PWM.
38
Capítulo 4 - Modelagem do Inversor de Freqüência
Tensoes de fase na saida do inversor
Va
150
0
-150
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0
0.01
0.02
0.03
0.04
0.05
tempo(s)
0.06
0.07
0.08
0.09
0.1
Vb
150
0
-150
Vc
150
0
-150
Figura 22-Tensões de fase na saída do inversor.
Frequencias existentes no sinal de saida do inversor
para as tensoes de fase
Amp.harmonica
Fase A
80
60
40
20
0
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
0
500
1000
1500
2000
2500
3000
Frequencia (Hz)
3500
4000
4500
5000
Amp.harmonica
Fase B
80
60
40
20
0
Amp.harmonica
Fase C
80
60
40
20
0
Figura 23-Espectro das freqüências para as tensões de fase.
39
Capítulo 4 - Modelagem do Inversor de Freqüência
Tensoes de linha na saida do inversor
200
Vab
100
0
-100
-200
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0
0.01
0.02
0.03
0.04
0.05
tempo(s)
0.06
0.07
0.08
0.09
0.1
200
Vbc
100
0
-100
-200
200
Vca
100
0
-100
-200
Figura 24-Tensões de linha na saída do inversor.
Frequencias existentes no sinal de saida do inversor
para as tensoes de linha
Amp.harmonica
tensao VAB
150
100
50
0
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
0
500
1000
1500
2000
2500
3000
Frequencia (Hz)
3500
4000
4500
5000
Amp.harmonica
tensao VBC
150
100
50
0
Amp.harmonica
tensao VCA
150
100
50
0
Figura 25-Espectro das freqüências para as tensões de linha.
40
Capítulo 4 - Modelagem do Inversor de Freqüência
Tabela 1-Amplitude harmônica para as tensões de fase.
Ordem Harmônica (h)
Freqüência (Hz)
Amplitude (Volts)
Teórico
Simulação
fundamental
60
70,00
69,96
37
2220
19,25
19,24
41
2460
19,25
19,20
73
4380
1,14
1,08
77
4620
27,48
27,40
79
4740
27,48
27,56
83
4980
1,13
1,06
Tabela 2-Amplitude harmônica para as tensões de linha.
Ordem Harmônica (h)
Freqüência (Hz)
Amplitude (Volts)
Teórico
Simulação
fundamental
60
121,27
121,16
35
2100
1,24
1,27
37
2220
33,41
33,48
41
2460
33,41
33,22
43
2580
1,24
1,26
73
4380
1,98
1,82
77
4620
47,52
47,45
79
4740
47,52
47,55
83
4980
1,98
1,88
4. Sumário do capítulo.
Neste capítulo foi apresentada a modelagem do inversor de freqüência que será
usado para investigar a proposta de controle da potência elétrica fornecida por um
aerogerador.
Após obtenção do modelo foram efetuados vários testes com a posterior análise
dos resultados. As curvas aqui obtidas são muito semelhantes a que se encontram em
[17] e [18] e estão em conformidade com os princípios básicos de funcionamento de um
inversor de freqüência trifásico síncrono.
Capítulo 5 - Modelagem da Turbina Eólica
41
Capítulo 5
Modelagem da turbina eólica.
1. Introdução.
Com o aumento da escassez das fontes não renováveis de energia, tais como
combustíveis fósseis e o crescimento da consciência ecológica, a participação das fontes
renováveis na geração de energia elétrica tem aumentado nos últimos anos.
Uma das maneiras de gerar eletricidade através das fontes renováveis de energia
é fazer o uso de turbinas eólicas que capturam a energia cinética dos ventos e a
transformam em energia mecânica de rotação a qual é convertida em energia elétrica
pelos geradores acoplados a essas máquinas. Atualmente há uma tendência,
principalmente em países europeus, do uso intensivo da energia dos ventos para a
geração de eletricidade. Como resultado disso, os aerogeradores (turbina eólica mais
gerador) terão influência no comportamento dos sistemas elétricos de potência, tornando
necessário ao despacho a inclusão da potência eólica.
Devido ao uso crescente de turbinas de velocidade variável será tratada nesse
capítulo a modelagem para este tipo máquina, além da modelagem dos controles para
regulação da potência mecânica. Após a formulação do modelo serão mostrados alguns
resultados obtidos nas simulações.
2. A modelagem da velocidade do vento.
Antes de se partir para o modelo da turbina eólica é necessário apresentar o
modelo utilizado para a geração da curva de velocidade do vento. Como se sabe o vento
é o movimento do ar na atmosfera terrestre. Esse movimento do ar é gerado
principalmente pelo aquecimento da superfície da Terra nas regiões próximas ao equador
e pelo resfriamento nas regiões próximas aos pólos. Dessa forma, os ventos das
superfícies frias circulam dos pólos em direção ao Equador para substituir o ar quente
tropical que, por sua vez, desloca-se para os pólos. O vento também é influenciado pela
rotação da terra, provocando variações sazonais na sua intensidade e direção, e pela
topografia local.
Para utilizar a energia dos ventos eficientemente na geração de energia elétrica, é
necessário medir a direção e a intensidade dos ventos. Essas medições são feitas
normalmente com anemômetros instalados a dez metros do solo. É possível fazer
estimativas do comportamento dos ventos utilizando-se tratamento estatístico dos dados
obtidos.
Capítulo 5 - Modelagem da Turbina Eólica
42
No tratamento desses dados, a curva mais importante é a curva que mostra a
freqüência de velocidades, a qual fornece a parcela de tempo em que uma determinada
velocidade foi observada. Dessa curva deriva a curva de energia disponível (Wh/m2),
também conhecida como potência média bruta ou fluxo de potência eólica.
Segundo [2], caso não exista disponibilidade de uma curva de freqüência de
velocidade do vento, as velocidades podem ser projetadas a partir de uma velocidade
média, utilizando-se a distribuição de Weibull. O conhecimento da velocidade média do
vento é fundamental para a estimativa da energia produzida, porque os aerogeradores
começam a gerar numa determinada velocidade de vento (cut-in) e param de gerar
quando a velocidade ultrapassa o valor de segurança (cut-out). Além disso, a velocidade
média do vento é fator determinante para o dimensionamento do sistema de
armazenamento de energia, quando esse for utilizado.
Para os objetivos desse trabalho não se faz necessário produzir curvas que
retratam distribuição do vento em um determinado período de tempo. Há sim a
necessidade de se trabalhar com curvas instantâneas de velocidade do vento, as quais
devem retratar os períodos em que ocorrem as rajadas e as turbulências que são
características da aleatoriedade do vento.
Uma forma de se obter a curva de velocidade do vento é supor que o vento é
formado por quatro componentes [16]:
•
Velocidade média;
•
Rampa de velocidade;
•
Rajadas de vento;
•
Turbulência.
A soma desses quatro componentes dá a forma da curva de vento a ser aplicada
no modelo da turbina eólica. Matematicamente, três desses quatro componentes podem
ser determinados da seguinte maneira:
A rampa de velocidade é caracterizada por três parâmetros dados por:
•
Amplitude da rampa de velocidade do vento Ar (m/s);
•
Valor de tempo inicial da rampa de velocidade Tsr (s);
•
Valor de tempo final da rampa de velocidade Ter (s).
As rajadas de vento são caracterizadas pelos seguintes parâmetros:
•
Amplitude da rajada de vento Ag (m/s);
•
Valor de tempo inicial da rajada de vento Tsg (s);
•
Valor de tempo final da rajada de velocidade Teg (s).
Dessa forma as rajadas de vento podem ser modeladas pela seguinte equação:
43
Capítulo 5 - Modelagem da Turbina Eólica
t < Tsg : vwg = 0
Tsg ≤ t ≤ Teg : vwg = Ag [1 − cos(2π (t Dg − Tsg Dg ))]
(5-1)
Teg < t : vwg = 0
onde Dg é a duração da rajada de vento em segundos e é igual a Teg - Tsg.
A turbulência é modelada como sendo um processo estacionário e é utilizada a
seguinte equação de densidade espectral de freqüência:
S( f ) =
1
lv
ln(h zo ) 2 w
v
y
w
u
fl
1 + 1,5 z
vw
x
(5-2)
53
onde f é a freqüência em hertz da rajada de vento; h é a altura do eixo da turbina em
metros; vw é a velocidade média do vento em (m/s); l é o comprimento da escala de
turbulência em metros, a qual é igual a 20 se h é menor que 30m e igual a 600 se h é
maior que 30m; zo é o coeficiente de rugosidade do solo.
Mas devido a falta de informações satisfatórias sobre (5-2) a mesma foi
substituída por uma função geradora de números aleatórios, a qual foi utilizada para
representar a turbulência existente no vento.
Curva de velocidade do vento
17
16
15
m/s
14
13
12
11
10
0
20
40
60
80
100
120
140
tempo(s)
Figura 26-Curva da velocidade do vento obtida da modelagem matemática.
A Figura 26 mostra uma curva de velocidade do vento obtida a partir dessa
modelagem matemática. Durante os primeiros 5s o vento tem uma velocidade média de
12m/s. A partir de 5s ocorre uma rampa que eleva a velocidade do vento para 16m/s.
Essa rampa tem uma duração de 25s. Em 30s ocorre uma rajada cuja amplitude é de 1m/s, essa rajada causa uma desaceleração do vento, fazendo com que o mesmo atinja
uma velocidade em torno 14m/s. Essa rajada dura em torno de 15s. Uma nova rampa
Capítulo 5 - Modelagem da Turbina Eólica
44
tem início a partir dos 45s, causando uma desaceleração do vento até este atingir uma
velocidade de 12m/s. Essa rampa tem duração de 75s. A partir dos 120s a velocidade do
vento diminui novamente até atingir o valor médio de 11m/s.
3. A modelagem da turbina eólica.
Do ponto de vista formal, uma turbina eólica é constituída unicamente pelo rotor
(pás e respectiva ligação mecânica). No entanto a denominação anglo-saxônica “Wind
Turbines” associa não só o componente básico, mas todo o sistema de conversão, desde
as pás até a saída do gerador elétrico, incluindo até mesmo os sistemas de conversão de
freqüência, quando existentes [22]. Neste trabalho se chamará de turbina eólica o rotor
(Figura 27), e de aerogerador o conjunto formado pelo rotor da turbina, gerador elétrico,
sistema de transmissão, multiplicador de velocidade e sistema de controle, conforme
mostra a Figura 28.
Figura 27-Exemplo de um rotor de uma turbina eólica.
Figura 28-Exemplo de um aerogerador.
As forças presentes em uma turbina eólica e a produção do conjugado mecânico
serão discutidos brevemente a seguir.
45
Capítulo 5 - Modelagem da Turbina Eólica
A Figura 29 mostra a esquerda o rotor de uma turbina eólica e a direita uma seção
vertical de uma pá na qual pode-se observar o seu perfil. O vento que atinge esse perfil
frontalmente está representado na Figura 29 pelo vetor Vw. Como as pás do rotor estão
girando elas vêem uma componente de velocidade adicional representada pelo vetor Vt.
Estes dois vetores resultam no vetor de velocidade Vres.
8@I
8
I
8 B
{ {}| |
{ |
{
{f
{ {
~f~&&
Figura 29-Forças que atuam em uma turbina eólica e a produção de conjugado.
Perpendicular ao vetor Vres, o perfil produz um vetor de reação chamado força de
elevação (Felev) e um outro vetor alinhado ao vetor Vres chamado força de arraste (Farr).
Essa força de arraste, também conhecida como resistência do ar, aumenta à medida que
área do perfil, que está na direção do fluxo de ar, aumenta.
Essas duas forças resultam na força aerodinâmica, Faero, a qual pode ser
decomposta em mais duas forças: o vetor empuxo (Fempx) paralelo ao vetor Vw, o qual a
torre de sustentação da turbina eólica se opõe e o vetor conjugado (Fconj) perpendicular
ao vetor Vw, sendo que Fconj é o vetor de interesse na produção de energia.
Aproximações numéricas têm sido desenvolvidas para modelar a turbina eólica e
calcular o seu coeficiente de potência [24] Neste trabalho, para a realização da
modelagem da turbina eólica, foram utilizadas aproximações numéricas obtidas de [4] e
[14]. Em [4] as equações que descrevem a turbina eólica de velocidade variável foram
desenvolvidas levando em conta as seguintes considerações:
•
Todas as massas rotativas são representadas por um único elemento chamado
massa única;
•
Uma aproximação quase estática foi usada para descrever a aerodinâmica da
turbina.
Estas considerações reduzem a complexidade do modelo e a quantidade de
dados necessários. Segundo [14], no caso da turbina de velocidade variável, o eixo da
46
Capítulo 5 - Modelagem da Turbina Eólica
turbina pode ser desprezado, por que o conversor de freqüência desacopla o
comportamento mecânico do comportamento elétrico. Contudo, deve ser salientado que
as propriedades do eixo tem significativa importância na resposta das turbinas eólicas
quando da ocorrência de defeitos elétricos ou no estudo da variação dinâmica de tensão.
Assim o rotor da turbina eólica foi modelado usando as seguintes equações:
Pw =
ρ
2
cp (λ , θ ) Arotor vw3
116
cp(λ ,θ ) = 0, 22(
− 0, 40θ − 5)e
λi
λi =
(5-3)
−12,5
λi
(5-4)
1
1
0, 035
− 3
λ + 0, 08θ θ + 1
(5-5)
onde PW é a potência extraída do vento em W, é a densidade do ar em kg/m3, cp é o
coeficiente de performance ou coeficiente de potência, é a relação entre a velocidade
tangencial da ponta das pás da turbina eólica Vt e a velocidade do vento VW (ambas em
m/s), também chamada de “tip speed ratio” Vt /VW, é o ângulo de passo das pás do rotor
em graus e Ar é a área varrida pelas pás do rotor em m2.
4. A modelagem do controle da potência mecânica.
Turbinas eólicas são projetadas para produzir energia elétrica o mais barato
possível. Dessa forma elas são desenvolvidas para produzir máxima potência quando,
geralmente, a velocidade do vento alcança 15m/s. Em caso de violentas rajadas de vento
é necessário dissipar parte do excesso da energia contida no vento de modo a evitar
danos à turbina eólica. Assim todas as turbinas eólicas possuem algum dispositivo de
controle da potência mecânica.
Existem dois métodos para limitar a potência mecânica absorvida do vento. O
primeiro deles é conhecido como deslocamento do vento ou estol (do inglês stall), já o
segundo método é conhecido como variação do ângulo do passo de pá (do inglês pitch).
O fenômeno conhecido como estol ocorre quando todo o fluxo de ar existente na
superfície superior de um perfil, repentinamente, deixa de aderir a essa superfície,
passando a girar em um vórtice irregular (condição conhecida como turbulência) e toda a
força de elevação advinda de uma zona de baixa pressão na superfície superior desse
perfil desaparece, conforme mostra a Figura 30.
47
Capítulo 5 - Modelagem da Turbina Eólica
Figura 30-Principio do estol.
As turbinas eólicas com limitação de potência por estol podem ser controladas por
meio passivo ou ativo. No controle de potência por estol passivo as pás do rotor são
montadas
em um ângulo fixo.
Contudo
a
geometria
do perfil das
pás
é
aerodinamicamente projetada para assegurar que, no momento em que a velocidade do
vento se tornar muito alta, seja criada uma turbulência na superfície da pá que não
recebe o fluxo de ar. A vantagem básica do controle por estol passivo é que ele evita o
uso de partes móveis e um sistema de controle complicado. Por outro lado este tipo de
controle representa um problema aerodinâmico complexo.
Algumas turbinas eólicas de grande potência (acima de 1MW) são projetadas com
limitação de potência por estol ativo de forma a obter um conjugado razoável em baixas
velocidades do vento. Assim essas máquinas são programadas para girar suas pás
aumentando o ângulo entre o fluxo de ar e o perfil da pá. Na Figura 29 este ângulo está
indicado como e é conhecido como ângulo de ataque. Freqüentemente as pás giram
poucos graus dependendo da velocidade do vento. Quando a turbina eólica ultrapassa
sua potência nominal as pás se movimentam aumentado o ângulo de ataque de forma a
levar turbina eólica a um estol profundo dissipando o excesso de energia mecânica. Uma
das vantagens do estol ativo é que ele permite um controle mais preciso da potência
mecânica do que o estol passivo, bem como evita a sobrecarga mecânica da turbina
eólica quando ocorrem rajadas de vento. Nesse caso o mecanismo utilizado para
“estolar” a turbina eólica é acionado por dispositivos hidráulicos ou por servomotores.
Em uma turbina eólica com controle por variação do ângulo de passo das pás, um
controlador lógico programável (PLC), varre a potência mecânica de saída da turbina
eólica várias vezes por segundo. Quando esta potência se torna muito alta o PLC envia
uma ordem para mecanismo das pás do rotor e estas giram imediatamente. Assim as pás
são posicionadas como uma bandeira no vento, pelo grande aumento do ângulo (Figura
29), recebendo uma quantidade menor de fluxo de ar. Neste caso toda a força
aerodinâmica é reduzida, diminuindo o estresse mecânico da turbina eólica.
Quando a potência mecânica cai a valores baixos o mecanismo é acionado
novamente fazendo com que a superfície das pás receba mais fluxo de ar. Durante essas
duas operações as pás vão girar em torno do seu eixo longitudinal apenas alguns graus
Capítulo 5 - Modelagem da Turbina Eólica
48
por segundo. O projeto do controle por variação do ângulo de passo das pás é bastante
complexo, pois as pás do rotor devem girar exatamente o valor necessário para limitar a
potência mecânica. Em turbinas com este tipo de controle o PLC vai girar as pás poucos
graus cada vez que o vento mudar sua intensidade de maneira a manter as pás em um
ângulo ótimo maximizando a produção de potência mecânica para todas as velocidades
do vento. Para o controle do mecanismo são utilizados atuadores mecânicos, hidráulicos
ou elétricos com potência suficiente para movimentar as pás.
A Figura 31 mostra as curvas características do controle por estol e do controle
por variação do ângulo de passo das pás. Essa figura mostra as vantagens da limitação
de potência mecânica por variação do ângulo de passo das pás em relação ao controle
por estol. Na turbina de velocidade variável com controle de ângulo de passo de pá, a
velocidade da turbina é ajustada de acordo com a velocidade do vento de forma a
maximizar a potência mecânica produzida.
Figura 31-Curvas características do controle por estol e controle por variação do ângulo de passo
das pás.
De acordo com [6] existem três modos de operação para o sistema controle da
potência mecânica implementado: a) Se a turbina eólica produz mais potência que seu
valor nominal o ângulo de passo das pás é incrementado a uma da taxa de até 6°/s; b)
Se a potência está próxima do valor nominal da turbina eólica, o sistema de controle
interrompe sua ação de controle e o ângulo de passo das pás é mantido constante; c) Se
a potência está abaixo do valor nominal o ângulo de passo das pás é obtido de uma
curva característica a qual fornece um ângulo de passo ótimo em função da potência
produzida [15]. Dessa forma a Figura 32 mostra a curva do ângulo de referência das pás
49
Capítulo 5 - Modelagem da Turbina Eólica
do rotor
ref
versus a potência mecânica, utilizada na modelagem da turbina eólica. Nesse
caso temos o seguinte:
•
No intervalo de potência que vai de zero até 1980kW (inclusive) a curva é regida
pela seguinte equação:
β ref = 5 + sin(2π 0,10
P
5
+ π)
1000 12
(5-6)
•
Quando a potência se encontra entre 1980kW e 2000kW o valor de βref é nulo;
•
Quando a potência é maior ou igual a 2000kW o valor de βref é dado por:
β ref = 0,3640 P − 720, 6611
(5-7)
Curva caracterisitca de potencia da turbina
90
80
Angulo de referencia em graus (°)
70
60
50
40
30
20
10
0
0
500
1000
1500
2000
2500
3000
Potencia da turbina em kW
Figura 32-Curva utilizada para a geração do ângulo de referência para uma turbina eólica de 2MW.
Foi implementado, para fins de simulação, um controle em malha fechada com
realimentação negativa, sendo que nesse tipo de controle utilizou-se um controlador do
tipo integral I.
O controlador I tem a seguinte característica: ganho do integrador Ki igual a 50s-1.
A Figura 33 mostra o digrama de blocos do controlador implementado.
Figura 33-Diagrama de blocos do controlador do ângulo de passo das pás de uma turbina eólica
de 2MW.
50
Capítulo 5 - Modelagem da Turbina Eólica
5. Simulação do modelo completo da turbina eólica.
Os resultados obtidos com a estratégia de controle mencionada acima se referem
a uma turbina eólica de velocidade variável com as características dadas pela Tabela 3.
Os dados desta turbina eólica se encontram em [4]. Os resultados obtidos são
apresentados na Figura 34, Figura 35, Figura 36 e na Figura 37.
Tabela 3-Características da turbina eólica usada nas simulações.
Diâmetro do rotor:
75m
Área do rotor:
4418m²
Velocidade do rotor:
9-21rpm
Potência nominal:
2MW
Relação de engrenagens:
1:100
Momento de inércia total:
5.9 x 106Kg.m²
Curva de velocidade do vento aplicada a turbina eolica
13.8
13.6
13.4
13.2
m/s
13
12.8
12.6
12.4
12.2
12
11.8
0
10
20
30
40
50
60
70
80
90
100
tempo(s)
Figura 34-Curva de Velocidade do vento aplicada à turbina eólica de 2MW.
A Figura 34 mostra a curva de velocidade do vento aplicada a turbina eólica. Nos
primeiros 20s de simulação a velocidade do vento é mantida em torno de 12m/s. A partir
desse intervalo é acrescentada uma rampa de vento que eleva a velocidade do mesmo
para 13,5m/s a uma taxa 0,0375m/s a cada segundo. Essa rampa atua por 40s. No
intervalo que vai 60s até 100s, não existe mais nenhum evento transitório na velocidade
do vento e a mesma é mantida em torno de 13,5m/s até o fim da simulação e sujeita
somente a turbulências aleatórias.
51
Capítulo 5 - Modelagem da Turbina Eólica
Potencia mecanica desenvolvida pela turbina eolica
6
2.1
x 10
2
Pmec (W)
1.9
1.8
1.7
1.6
1.5
0
10
20
30
40
50
60
70
80
90
100
tempo(s)
Figura 35-Potência mecânica desenvolvida pela turbina eólica de 2MW.
Conjugado mecanico desenvolvido pela turbina eolica
5
11
x 10
10.5
Tmec (N.m)
10
9.5
9
8.5
8
7.5
0
10
20
30
40
50
60
70
80
90
100
tempo(s)
Figura 36-Conjugado mecânico gerado pela turbina eólica de 2MW.
A Figura 35 mostra a curva de potência mecânica gerada pela turbina eólica
durante a simulação. Durante os primeiros 20s de simulação a potência mecânica tem
um valor médio em torno de 1,52MW. Com aumento da velocidade do vento a energia
cinética contida no mesmo aumenta e a potência mecânica gerada cresce a uma taxa de
0,0135MW a cada segundo, até atingir a potência nominal de 2MW. A partir daí o
controle do ângulo de passo das pás do rotor da turbina eólica é habilitado e a potência
mecânica é mantida constante em 2MW.
Na Figura 36 tem-se o conjugado mecânico obtido na simulação. Neste caso para
os primeiros 20s de simulação o conjugado apresenta um valor médio de 800kN.m.
Durante a simulação da rampa a taxa de crescimento do conjugado mecânico se
52
Capítulo 5 - Modelagem da Turbina Eólica
encontra em torno de 7,35KN.m por segundo. Quando cessa a rampa de velocidade do
vento o conjugado mecânico permanece em torno de 1050kN.m.
A Figura 37 mostra a variação do ângulo de passo das pás do rotor. De acordo
com a estratégia de controle mencionada na seção 4, durante os primeiros 20s de
simulação o ângulo de passo das pás do rotor permaneceu em um valor praticamente
constante objetivando capturar o máximo de energia possível do vento.
Variaçao do angulo de passo das pas do rotor da turbina eolica
8
7
6
Angulo em graus
5
4
3
2
1
0
0
10
20
30
40
50
60
70
80
90
100
tempo(s)
Figura 37-Variação do ângulo das pás do rotor durante a simulação.
No intervalo 20s a 55s o ângulo de passo diminui de aproximadamente 0,2° na
tentativa de se ajustar à situação de aumento da potência mecânica promovida pela
rampa de vento. A partir de 55s o controle do ângulo de passo das pás do rotor passa
atuar diminuindo a área útil das pás do rotor em relação ao vento até que a rampa de
vento termina e o ângulo de passo das pás permanece, então, em um valor médio em
torno de 7,1°.
6. Sumário do capítulo.
Neste capítulo foi apresentada a modelagem básica para simulação da turbina
eólica de velocidade variável e do controle utilizado para regular a potência mecânica
entregue ao gerador.
Após obtenção do modelo foram efetuadas algumas simulações, tendo como
máquina teste uma turbina eólica de 2MW com regulação de potência por variação do
ângulo de passo das pás. Foi feita, ainda, uma análise resumida dos resultados.
53
Capítulo 6 - A Estratégia de Controle
Capítulo 6
A estratégia de controle.
1. Introdução.
Este capítulo descreverá uma forma de se controlar as potências ativa e reativa
liberadas pelo aerogerador. São apresentados os resultados obtidos nas simulações do
comportamento dinâmico de um GIDA conectado a uma barra infinita, com o controle das
potências ativa e reativa através de um inversor trifásico conectado aos terminais de rotor
da máquina de indução. Esta forma de controle é uma contribuição no sentido de ajudar o
despacho de potência do sistema interligado a ser mais eficaz.
2. Formulação matemática.
Tradicionalmente, toda a energia que o vento pode fornecer flui pela rede elétrica
de forma a reduzir os custos de investimento em equipamentos. Contudo, se um
aerogerador for forçado a entregar uma potência constante a rede elétrica, definida por
um
despacho
de
carga,
será
necessário
fazer
o
controle
dessa
potência.
Conseqüentemente haverá uma diferença entre a potência mecânica no eixo da turbina
eólica e a potência elétrica gerada no estator da máquina de indução.
Com essa restrição, as tensões do rotor deverão ser controladas, de forma que
esse excesso ou falta de potência mecânica seja absorvida ou suprida por um inversor de
freqüência conectado ao rotor do gerador de indução. Desse modo, baseado na equação
de balanço de potência, a diferença entre a potência mecânica fornecida pela turbina
eólica e a potência elétrica entregue pelo estator do GIDA, a menos das perdas, deverá
ser fornecida ou absorvida pelo inversor conectado ao rotor do gerador.
Assim, o rotor da máquina de indução duplamente excitada é conectado a um
inversor trifásico conforme mostra a Figura 38. Com a definição da potência a ser
despachada, a medição da potência entregue pelo estator e considerando que o rotor do
gerador de indução irá absorver qualquer desvio na potência elétrica, o inversor
conectado no rotor do gerador poderá controlar o fluxo de potência necessário para que o
aerogerador possa despachar uma potência elétrica constante.
Considerando que as correntes estão deixando a máquina de indução, as
potências ativa e reativa, em coordenadas qd0, entregues pelo gerador são dadas por:
3
P = (vds ids + vqs iqs + vdr idr' + vqr iqr' )
2
(6-1)
54
Capítulo 6 - A Estratégia de Controle
Q=
3
(vqs ids − vds iqs + vqr idr' − vdr iqr' )
2
(6-2)
¤¥
¦ 2£ ¡ § B¨
*&
¡
©
ªD«­¬
¡ ¢2£ ¢¡
®@¯@°± ²+³@²
´ °@²Dµ ¶D· ¸
Figura 38-Esquema da estratégia de controle para uma aerogerador de velocidade variável com
gerador de indução duplamente alimentado.
A todo momento, a potência elétrica do estator é amostrada, então:
3
Ps = (vds ids + vqs iqs )
2
(6-3)
3
Qs = (vqs ids − vds iqs )
2
(6-4)
Substituindo (6-3) e (6-4) em (6-1) e (6-2) respectivamente e definindo que P e Q
serão as potências ativa e reativa de referência determinadas pelo despacho, então:
3
Pref = Ps + (vdr idr' + vqr iqr' )
2
(6-5)
3
Qref = Qs + (vqr idr' − vdr iqr' )
2
(6-6)
O sinal de erro, que deverá ser compensado pelo rotor da máquina de indução, é
dado por (6-7) e (6-8):
3
Pref − Ps = ∆P = (vdr idr' + vqr iqr' )
2
(6-7)
3
Qref − Qs = ∆Q = (vqr idr' − vdr iqr' )
2
(6-8)
55
Capítulo 6 - A Estratégia de Controle
2
∆P
3
2
vqr idr' − vdr iqr' = ∆Q
3
vdr idr' + vqr iqr' =
(6-9)
Amostrando as correntes de fase que fluem pelos anéis do rotor e realizando uma
transformação de coordenadas abc para qd0, é possível obter as correntes de eixo em
quadratura e de eixo direto (iqr e idr). Resolvendo o sistema de equações, obtêm-se as
tensões de eixo em quadratura e eixo direto (vqr e vdr) dadas pela equação (6-10) e
utilizando a transformação de variáveis qd0 para abc obtêm-se os sinais de tensão de
referência que serão utilizados para o controle do inversor de tensão PWM.
Os valores dos resíduos ¹ P e ¹ Q antes de serem utilizados em (6-10), passam
por dois controladores PI, conforme mostra a Figura 39 e cujos os ganhos proporcionais
são unitários.
'
'
2 i ∆P − i ∆Q
vdr = ( dr '2 qr'2 )
3
i qr + i dr
'
'
2 i ∆P + i ∆Q
vqr = ( qr '2 dr'2 )
3
i qr + i dr
(6-10)
Figura 39-Controladores PI utilizados para processar os resíduos de potência ativa e reativa do
GIDA.
A Figura 40 mostra o diagrama de blocos usado para simular no tempo o
comportamento da estratégia de controle da potência. Observando o diagrama de blocos,
pode-se entender como são computadas as grandezas elétricas bem como sua
seqüência de cálculo. Esse diagrama é a síntese do procedimento usado para a
simulação da estratégia de controle da potência elétrica fornecida por um aerogerador.
56
Capítulo 6 - A Estratégia de Controle
Figura 40-Diagrama de blocos da simulação da estratégia de controle da potência.
Nesse diagrama Vqdr, são as tensões de eixo em quadratura e eixo direto do rotor
respectivamente, Vabcr são as tensões em coordenadas de fase do rotor, º
qd0r
são os
enlaces de fluxo por segundo dos eixos em quadratura, direto e zero respectivamente,
iqd0r são as correntes dos eixos em quadratura, direto e zero do rotor respectivamente,
iqd0s são as correntes dos eixos em quadratura, direto e zero do estator respectivamente,
Ps e Qs são as potências ativa e reativa do estator respectivamente, Pref e Qref são as
potências ativa e reativa de referência respectivamente, ¹ Ps e ¹ Qs são os resíduos de
potência ativa e reativa respectivamente (o símbolo (´) indica que as grandezas foram
tratadas no controlador PI) e Vqr é a tensão de eixo em quadratura do rotor e Vdr é a
tensão de eixo direto do rotor.
3. Simulações do aerogerador e do sistema de controle.
Os modelos da máquina de indução, inversor de tensão e da turbina eólica são
interligados conforme mostra a Figura 38. O diagrama de blocos mostrado na Figura 41,
apresenta de forma sintética a interação entre os modelos descritos anteriormente.
Para a interação entre os modelos da turbina eólica e do gerador de indução
houve a necessidade de se referir os momentos de inércia e os conjugados tanto para o
eixo de baixa velocidade quanto para o eixo de alta velocidade, de forma a equilibrar as
dinâmicas do rotor da turbina eólica e da máquina de indução.
57
Capítulo 6 - A Estratégia de Controle
Figura 41-Diagrama de blocos sintetizado mostrando a interação dos diversos subsistemas que
compõe o modelo do aerogerador.
Quando um motor elétrico aciona determinada carga através de um sistema de
transmissão que pode ser constituído por engrenagens, polias ou correias, a formulação
das equações que expressam o comportamento do sistema requer que os conjuntos
desenvolvidos em cada um dos componentes do sistema sejam referidos a um único
eixo, o qual é usualmente o eixo do próprio motor.
Figura 42-Exemplo de cadeia cinemática
No caso do acionamento mostrado na Figura 42, temos:
Tmωmη = Tcωc
onde Tm é o conjugado desenvolvido pelo motor em N.m, »
(6-11)
m
é a velocidade angular do
motor em rad/s, ¼ é o rendimento da transmissão, Tc é o conjugado resistente da carga
em N.m e »
c
é a velocidade angular da carga.em rad/s.
Sendo a relação de transmissão “Z”, tem-se:
Z=
Tm =
ωm
ωc
Tcωc
ηωm
=
(6-12)
Tc
ηZ
(6-13)
O conjugado da carga referido ao motor é igual ao conjugado da carga dividido
pela relação de transmissão e pelo rendimento da mesma. Para se referir os momentos
58
Capítulo 6 - A Estratégia de Controle
de inércia ao eixo do motor, recorre-se ao principio da invariabilidade da energia cinética
de uma transmissão.
Ec = J m
ωm2
2
= Jc
ωc2
(6-14)
2
A estratégia de controle descrita na seção 2 foi aplicada a um GIDA acoplado a
uma turbina eólica de 2MW. Os dados da máquina de indução podem ser encontrados na
Tabela 4, já os dados da turbina eólica se encontram na Tabela 3.
Tabela 4-Características da máquina de indução usada nas simulações.
Número de pólos:
Quatro
Velocidade do gerador:
900 a 2100rpm
Indutância mútua:
0,0021H
Indutância de dispersão do estator:
6,9712 x 10-5H
Indutância de dispersão do rotor:
5,5770 x 10-5H
Resistência do estator:
0,0026 ½
Resistência do rotor:
0,0026 ½
Momento de inércia:
590Kg.m2
Foram realizadas quatro simulações. Na primeira delas, chamada de simulação I,
a potência ativa de referência foi considerada 1,49MW e alterada após um determinado
intervalo de tempo para 1,85MW. Nesse caso foi verificado o comportamento do
aerogerador durante a ação da estratégia de controle.
Na segunda simulação, chamada de simulação II, a potência de referência foi
deixada constante em um valor próximo de 1,49MW. Nela foi verificada a excursão de
velocidade após a aplicação da estratégia de controle e feito o balanço das potências
envolvidas no aerogerador.
Na simulação III, o patamar de potência mecânica foi alterado para
aproximadamente 1,60W e a potência ativa de referência foi considerada como sendo,
também, 1,60W. O objetivo dessa simulação foi de verificar o comportamento do
aerogerador quando a potência ativa de referência tem o mesmo valor da potência
mecânica disponível.
O objetivo da simulação IV foi de verificar o balanço de potências e a excursão de
velocidade quando a potência elétrica de saída é muito maior e muito menor que a
potência mecânica disponível. Para esta simulação a potência ativa de referência foi
considerada aproximadamente 5% maior e 5% menor que a potência mecânica
disponível, a qual vale aproximadamente 1,52MW.
59
Capítulo 6 - A Estratégia de Controle
3.1. Simulação I.
A Figura 43 mostra as curvas de velocidade do vento, conjugado mecânico e
potência mecânica respectivamente. Nos primeiros 10s a potência mecânica vale
aproximadamente 1,52MW e a velocidade do vento tem um valor médio de 12m/s. No
intervalo de tempo entre 10s e 15s foi aplicada uma rampa à velocidade do vento,
elevando a mesma para 13m/s. No intervalo de tempo compreendido entre 15s e 40s, a
potência mecânica foi elevada para um valor médio de 1,89MW. A curva de conjugado
mostrada na Figura 43(b) foi utilizada como conjugado de entrada no GIDA.
Vel.vento (m/s)
Velocidade do vento, Potencia mecanica e conjugado mecanico
13.5
13
12.5
(a)
12
11.5
0
5
10
15
20
25
30
35
40
Tmec (N.m)
5
11
10
x 10
9
8
7
(b)
0
5
10
15
20
25
30
35
40
6
Pmec (W)
2
x 10
1.8
1.6
1.4
(c)
0
5
10
15
20
tempo (s)
25
30
35
40
Figura 43-Curvas de (a) Velocidade do vento (b) Conjugado de mecânico (c) Potência Mecânica.
Simulação I.
60
Capítulo 6 - A Estratégia de Controle
Na Figura 44 temos as curvas de potência ativa, potência reativa e fator de
potência do aerogerador respectivamente. Nessa figura observa-se que, nos primeiros 5s
de simulação, o inversor de freqüência alimenta os terminais do rotor com uma tensão
nula, forçando o GIDA a operar de maneira similar a um gerador de indução de rotor em
gaiola. Pode-se notar durante esse período pequenas oscilações em baixa freqüência da
potência.
A partir de 5s o controle proposto para o GIDA é habilitado e o valor da potência
ativa, após um período transitório, passa a ser próximo de 1,49MW. Pode-se notar que
no intervalo de tempo entre 9s e 40s as potências ativa e reativa não mais oscilam em
baixa freqüência. No intervalo compreendido entre 9s e 12,5s, a potência ativa liberada
para a rede elétrica vale aproximadamente 1,49MW. Nesse mesmo intervalo a potência
reativa é nula e, conseqüentemente, o fator de potência é igual a 1.
Em 12,5s a potência ativa é alterada para 1,85MW, a potência reativa de
referência tem seu valor alterado para 1MVAr e o fator de potência passa a ser próximo
de 0,87 capacitivo. A partir de 12,5s os sinais de referência das potências ativa e reativa
são mantidos constantes.
6
Pger (W)
2
Potencia ativa, Potencia reativa e fator de potencia
x 10
1.5
1
(a)
0
5
10
15
20
25
30
35
40
6
Qger (Var)
x 10
1
0
(b)
-1
0
5
10
15
20
25
30
35
40
1.05
FP ger
1
0.95
(c)
0.9
0.85
0
5
10
15
20
tempo (s)
25
30
35
40
Figura 44-Curvas de (a) Potência ativa (b) Potência reativa (c) Fator de potência. Simulação I.
Ainda com relação a Figura 44, no intervalo compreendido entre 9s e 12,5s, há
um desvio entre a potência ativa de saída em relação ao valor de referência estabelecido
61
Capítulo 6 - A Estratégia de Controle
que oscila entre -0,67% e 0,57%. Tem-se, também, um desvio da ordem de 249,67VAr
para a potência reativa.
Já no intervalo de tempo que vai de 35s a 40s, o desvio entre a potência ativa de
saída e a potência ativa de referência está situado entre -0,045% e 0,37%. Há, também,
um pequeno desvio para a potência reativa (-0,028%) em relação ao seu valor de
referência.
A Figura 45 mostra que, após o período transitório inicial, o rotor do GIDA passa a
fornecer potência ativa para o inversor afim de a manter a potência do estator no valor de
referência pré-estabelcido. No intervalo de tempo entre 5s e 9s, o rotor envia para
inversor uma potência média em torno de 88kW. A potência consumida pelo inversor
aumenta até que a potência ativa no estator do gerador se ajusta no valor de referência.
No intervalo compreendido entre 9s e 12,5s nota-se que o valor da potência média do
rotor tende para um valor de regime à medida que a potência ativa de saída do estator
tende para o valor de referência. Nesse intervalo o inversor consome uma potência
elétrica média em torno de 150kW.
6
Pmec (W)
2
Potencia mecanica, Potencia ativa e Potencia no rotor
x 10
1.8
1.6
1.4
(a)
0
5
10
15
20
25
30
35
40
6
P ger (W)
2
x 10
1.5
(b)
1
0
5
10
15
20
25
30
35
40
5
Protor (W)
2
x 10
0
(c)
-2
0
5
10
15
20
tempo (s)
25
30
35
40
Figura 45-Curvas de (a) Potência mecânica (b) Potência ativa (c) Potência no rotor. Simulação I.
No intervalo de tempo entre 35s e 40s, com a potência ativa em torno da potência
de referência (1,85MW), a potência consumida pelo inversor tende a se estabilizar em
torno de 68kW. Os valores citados anteriormente ainda não são os valores de regime,
pois, conforme mostra a Figura 46, a velocidade ainda não atingiu seu valor de regime
permanente.
62
Capítulo 6 - A Estratégia de Controle
As curvas de velocidade mecânica dos eixos de alta rotação (eixo do gerador
elétrico) e eixo de baixa rotação (eixo da turbina eólica) respectivamente, apresentadas
na Figura 46 mostram que, no intervalo de 5s a 9s, a máquina tem uma aceleração
positiva devido ao excesso de potência mecânica existente nesse intervalo e à
acomodação da estratégia de controle no valor de referência.
No período compreendido entre 11s e 12,5s, o aerogerador tem uma aceleração
maior devido ao aumento da potência mecânica, que é maior que a potência ativa de
referência. Já no intervalo de tempo entre 12,5s a 15s, a Figura 46 mostra que o
aerogerador tende a desacelerar devido ao aumento do valor da potência ativa de
referência em relação à potência mecânica disponível. A partir de 15s o aerogerador
desacelera suavemente, pois a potência ativa já está ajustada no valor de referência e a
potência no rotor está tendendo a um valor de regime, dessa forma a potência de
aceleração vai sendo dissipada gradativamente.
Velocidade mecanica do aerogerador
RPMeixo alta velocidade
1900
1880
1860
1840
1800
RPMeixo baixa velocidade
(a)
1820
0
5
10
15
20
25
30
35
40
19
18.8
18.6
18.4
(b)
18.2
18
0
5
10
15
20
tempo (s)
25
30
35
40
Figura 46-Curvas de (a) Velocidade mecânica eixo de alta rotação (b) Velocidade mecânica eixo de
baixa rotação. Simulação I.
3.2. Simulação II.
Esta simulação permitiu verificar que a velocidade do aerogerador atinge seu
regime permanente e que a estratégia de controle implementada permite que o GIDA
possa fornecer uma potência elétrica livre de flutuação em baixa freqüência por um longo
intervalo de tempo.
63
Capítulo 6 - A Estratégia de Controle
Nesta simulação, conforme mostra a Figura 47, a potência ativa de referência foi
estabelecida como sendo de 1,49MW e a potência reativa de referência foi fixada em
0MVAr e, conseqüentemente, tem-se um fator de potência unitário. Nota-se que no
intervalo de tempo compreendido entre 140s e 160s, o desvio entre a potência ativa de
saída em relação ao valor de referência pré-estabelecido oscila entre -0,16% e 0,16%.
Adicionalmente tem-se um desvio da ordem de 47,88VAr para a potência reativa.
6
P ger (W)
1.6
Potencia ativa, Potencia reativa e fator de potencia
x 10
1.4
1.2
(a)
1
20
40
60
80
100
120
140
160
20
40
60
80
100
120
140
160
Qger (Var)
5
6
4
x 10
2
0
-2
(b)
1.05
FPger
1
0.95
(c)
0.9
0.85
20
40
60
80
100
tempo (s)
120
140
160
Figura 47-Curvas de (a) Potência ativa (b) Potência reativa (c) Fator de potência. Simulação II.
Na Figura 48 são apresentadas as curvas de potência mecânica e potência
elétrica para o estator e o rotor do GIDA. Observa-se que a potência mecânica tem um
valor médio de 1,52MW, a potência referência está em torno de 1,49MW e a potência no
rotor, no período compreendido entre 140s e 160s, vale aproximadamente 7,1kW.
Embora a potência mecânica apresente uma média constante e, conforme mostra
a Figura 49, não haver variações significativas na velocidade do vento, como no caso da
simulação I, a potência elétrica no rotor não atinge o equilíbrio rapidamente. Este fato se
deve à desaceleração do aerogerador e quando a velocidade mecânica atinge um valor
próximo do regime permanente, a potência do rotor se estabiliza de forma a manter a
potência elétrica do aerogerador no seu valor de referência.
A Figura 50 mostra as curvas de velocidade dos eixos de alta e baixa rotação
respectivamente. Nessa figura observa-se que, a partir dos 5s, quando a estratégia de
controle é habilitada, ocorre uma aceleração do aerogerador. Essa aceleração é devida á
acomodação da potência elétrica, a qual leva em torno de 4s para atingir o valor de
64
Capítulo 6 - A Estratégia de Controle
referência. Após a potência elétrica assumir o seu valor de referência, toda a potência de
aceleração vai reduzindo gradativamente, o que faz com que o aerogerador desacelere
suavemente. O aerogerador atinge uma velocidade máxima de em torno de 1885rpm e
próximo do regime permanente sua velocidade está em torno de 1822rpm.
6
Pmec (W)
1.56
Potencia mecanica, Potencia ativa e Potencia no rotor
x 10
1.54
1.52
(a)
1.5
20
40
60
80
100
120
140
160
6
Pger (W)
1.6
x 10
1.4
(b)
1.2
1
20
40
60
80
100
120
140
160
5
Protor (W)
1
x 10
0
(c)
-1
20
40
60
80
100
tempo (s)
120
140
160
Figura 48-Curvas de (a) Potência mecânica (b) Potência ativa (c) Potência no rotor. Simulação II.
Velocidade do vento
12.05
12.04
12.03
Vel. vento (m/s)
12.02
12.01
12
11.99
11.98
11.97
11.96
11.95
20
40
60
80
100
tempo (s)
120
140
Figura 49-Curva velocidade do vento utilizada na simulação II.
160
65
Capítulo 6 - A Estratégia de Controle
Velocidade mecanica do aerogerador
RPMeixo alta velocidade
1900
1880
1860
1840
(a)
1820
RPMeixo baixa velocidade
1800
20
40
60
80
100
120
140
160
19
18.8
18.6
18.4
(b)
18.2
18
20
40
60
80
100
tempo (s)
120
140
160
Figura 50-Curvas de (a) Velocidade mecânica eixo de alta rotação (b) Velocidade mecânica eixo de
baixa rotação. Simulação II.
A Tabela 5 apresenta um resumo das principais grandezas envolvidas no
aerogerador durante o intervalo de tempo entre 140s e 160s. Esses valores são os
valores médios obtidos quando a velocidade mecânica do aerogerador já se encontrava
estabilizada.
Para fechar o balanço de potência foi utilizada a seguinte relação:
Pentrada = Psaida
(6-15)
Pmec + Pacel = Pestator + Pperdas + Protor + Pmag
(6-16)
que expandida resulta em:
onde Pmec é a potência mecânica absorvida do vento, Pacel no caso da simulação II é a
potência desacelerante, Pestator é a potência ativa entregue pelo aerogerador a rede
elétrica, Pperdas são perdas por efeito Joule totais no gerador, Protor no caso da simulação II
é a potência consumida pelo conversor de freqüência, e Pmag é a potência armazenada
no campo magnético do GIDA [21].
O diagrama de blocos da Figura 51 mostra as potências envolvidas no balanço
energético do GIDA.
66
Capítulo 6 - A Estratégia de Controle
Figura 51-Diagrama de blocos que ilustra o balanço de potência no GIDA para a simulação II.
Tabela 5-Resultados obtidos na simulação II no intervalo de tempo entre 140s e 160s.
Potência mecânica:
1.522.166,73W
Potência no estator:
1.493.942,24W
Perdas:
23.473,91W
Potência no rotor:
7.134,58W
Potência de aceleração:
-434,18W
Potência no campo magnético:
4.848,12W
Potência de entrada:
1.522.600,90W
Potência de saída:
1.529.398,85W
Erro relativo entre potência de entrada e potencia de saída:
-0,45%
Potência máxima no estator:
1.496.356,60W
Potência mínima no estator:
1.491.649,20W
Ripple máximo de potência no estator:
Potência reativa no estator:
Fator de Potencia:
4.707,40W
47,88VAr
Unitário
Velocidade mecânica média:
1.822rpm
Valor de pico da corrente no estator:
1.607,42A
Valor de pico da corrente no rotor:
1.839,32A
3.3. Simulação III.
Nessa simulação a potência elétrica de saída foi aproximadamente igual à
potência mecânica disponível. São apresentadas e comentadas as curvas de potência e
velocidade mecânica, além de ser mostrado o balanço de potência do aerogerador. A
Tabela 6 apresenta o resumo de algumas características dessa simulação.
67
Capítulo 6 - A Estratégia de Controle
Tabela 6-Características da simulação III.
Tempo de simulação:
0s-75s
75s-140s
Potência ativa de referência:
1,60MW
1,60MW
Potência reativa de referência:
1MVAr
0MVAr
Potência mecânica disponível:
1,60MW
1,60MW
Velocidade média do vento:
12,25m/s
12,25m/s
A Figura 52 mostra as curvas de potência ativa, potência reativa e fator de
potência respectivamente. Nessa figura nota-se que, no intervalo de tempo entre 9s e
140s, a potência ativa do estator está em um valor próximo de 1,60MW. Para a potência
reativa foram utilizados dois valores de referência; no intervalo de tempo compreendido
entre 9s e 75s essa potência está em um valor próximo de 1MVAr e no intervalo de
tempo entre 75s e 140s a mesma é nula. Dessa forma o fator de potência do
aerogerador, no intervalo entre 9s e 75s, está em um valor próximo de 0,85 capacitivo e
entre 75s e 140s o mesmo é unitário.
6
Pger (W)
1.8
Potencia ativa, Potencia reativa e fator de potencia
x 10
1.6
1.4
1.2
(a)
1
20
40
60
80
100
120
140
6
Qger (Var)
2
x 10
0
(b)
-2
20
40
60
80
100
120
140
FPger
1.2
1
0.8
(c)
0.6
20
40
60
80
tempo (s)
100
120
140
Figura 52-Curvas de (a) Potência ativa (b) Potência reativa (c) Fator de potência. Simulação III.
Ainda com relação a Figura 52, existe um desvio da potência ativa em relação ao
valor de referência estabelecido. No intervalo de tempo entre 120s e 140s, esse desvio
oscila entre -0,13% e 0,13%. Em compensação tem-se um desvio da ordem de 31,88VAr
para a potência reativa. Já no intervalo que vai 60s a 75s tem-se um desvio da potência
68
Capítulo 6 - A Estratégia de Controle
ativa em relação ao valor de referência que está entre -0,15% e 0,14%. O desvio da
potência reativa está em torno de -0,0021%, em relação ao seu valor de referência.
6
P mec (W)
1.65
Potencia mecanica, Potencia ativa e Potencia no rotor
x 10
1.6
(a)
1.55
20
40
60
80
100
120
140
Pger (W)
6
1.8
1.6
x 10
1.4
1.2
(b)
1
20
40
60
80
100
120
140
5
Protor (W)
1
x 10
0
(c)
-1
20
40
60
80
tempo (s)
100
120
140
Figura 53-Curvas de (a) Potência mecânica (b) Potência ativa (c) Potência no rotor. Simulação III.
A Figura 53 apresenta as curvas de potência mecânica, potência ativa e potência
no rotor do GIDA. Pode-se observar que a potência mecânica tem um valor médio
próximo de 1,60MW entre 120 e 140s. Já no intervalo de tempo que vai de 60s a 75s a
potência mecânica média vale aproximadamente 1,61MW. A potência ativa no rotor do
GIDA tem um valor médio, no intervalo entre 120s e 140s, em torno de -33,5kW e no
intervalo compreendido entre 60s e 75s a mesma vale -44kW.
Pode-se notar um certo desvio na potência mecânica gerada pela turbina eólica.
Esse desvio se deve ao fato da velocidade tangencial da turbina eólica influenciar na
geração de potência mecânica. Conforme mostra (6-17), a variável ¾
carrega as
informações da velocidade tangencial e como a velocidade mecânica do aerogerador
está aumentado no intervalo de tempo entre 5s e 9s (ver Figura 54), vai haver um
incremento da potência mecânica.
Pw =
ρ
2
cp(λ , θ ) Arotor v 3
(6-17)
onde PW é a potência extraída do vento em W, ¿ é a densidade do ar em kg/m3, cp é o
coeficiente de performance ou coeficiente de potência, ¾ é a relação entre a velocidade
tangencial da ponta da pá da turbina eólica Vt e a velocidade do vento VW (ambas em
69
Capítulo 6 - A Estratégia de Controle
m/s), também chamada de “tip speed ratio” Vt /VW, À é o ângulo de passo das pás do rotor
em graus e Ar é a área varrida pelas pás do rotor em m2.
Com relação à potência desenvolvida no rotor do GIDA, esta não atinge o
equilíbrio rapidamente. Este fato se deve à aceleração e à desaceleração do
aerogerador. A partir de 40s, quando a potência mecânica já está próxima do valor médio
de 1,60MW e a velocidade mecânica tem uma desaceleração mais suave (ver Figura 54),
a potência do rotor se estabiliza de forma a manter a potência elétrica do aerogerador no
seu valor de referência.
Velocidade mecanica do aerogerador
RPMeixo alta velocidade
1900
1850
1800
(a)
RPMeixo baixa velocidade
1750
20
40
60
80
100
120
140
19
18.5
18
(b)
17.5
20
40
60
80
tempo (s)
100
120
140
Figura 54-Curvas de (a) Velocidade mecânica eixo de alta rotação (b) Velocidade mecânica eixo de
baixa rotação. Simulação III.
A Figura 54 mostra as curvas de velocidade dos eixos de alta e baixa rotação
respectivamente. Nessa figura pode-se observar que, a partir dos 5s, quando a estratégia
de controle é habilitada, ocorre uma aceleração do aerogerador. Essa aceleração é
devida á acomodação da potência elétrica, a qual leva em torno de 4s para atingir o valor
de referência. Após a potência elétrica assumir o seu valor de referência, toda a potência
de aceleração vai reduzindo gradativamente, o que faz com que o aerogerador
desacelere suavemente. O aerogerador atinge uma velocidade máxima em torno de
1885rpm e próximo do regime permanente sua velocidade está em torno de 1793rpm.
A Tabela 7 apresenta um resumo das principais grandezas envolvidas no
aerogerador durante o intervalo de tempo entre 120s e 140s. Os valores médios
tabelados foram obtidos quando a velocidade mecânica do aerogerador já se encontrava
estabilizada.
70
Capítulo 6 - A Estratégia de Controle
Para fechar o balanço de potência foi utilizada a seguinte relação:
Pentrada = Psaida
(6-18)
Pmec + Protor = Pestator + Pperdas + Pmag + Pacel
(6-19)
que expandida resulta em:
onde Pmec é a potência mecânica absorvida do vento, Pacel no caso da simulação III é a
potência acelerante, Pestator é a potência ativa entregue pelo aerogerador a rede elétrica,
Pperdas são perdas por efeito Joule totais no gerador, Protor no caso da simulação III é a
potência consumida pelo rotor do conversor de freqüência, e Pmag é a potência
armazenada no campo magnético do GIDA. O diagrama de blocos da Figura 55 mostra
as potências envolvidas no balanço energético do GIDA.
Figura 55-Diagrama de blocos que ilustra o balanço de potência no GIDA para a simulação III.
Tabela 7-Resultados obtidos na simulação III no intervalo de tempo entre 120s e 140s.
Potência mecânica:
1.605.425,34W
Potência no estator:
1.600.154,05W
Perdas:
26.568,04W
Potência no rotor:
-33.481,64W
Potência de aceleração:
Potência no campo magnético:
178,72W
1.390,32W
Potência de entrada:
1.638.906,99W
Potência de saída:
1.628.291,12W
Erro relativo entre potência de entrada e potencia de saída:
0,65%
Potência máxima no estator:
1.602.110,67W
Potência mínima no estator:
1.597.945,72W
Ripple máximo de potência no estator:
Potência reativa no estator:
Fator de Potencia:
4.164,94W
31,88VAr
Unitário
Velocidade mecânica média:
1.793rpm
Valor de pico da corrente no estator:
1.720,80A
Valor de pico da corrente no rotor:
1.947,15A
71
Capítulo 6 - A Estratégia de Controle
3.4. Simulação IV.
Essa simulação tem duas partes distintas: na primeira parte a potência ativa de
saída foi aproximadamente 5% maior que a potência mecânica disponível. Já na segunda
parte, a potência ativa de saída é 5% menor que a potência mecânica disponível. A
Tabela 8 apresenta o resumo de algumas características dessa simulação.
Tabela 8-Características da simulação IV.
Tempo de simulação:
5s-150s
150s-300s
Potência ativa de referência:
1,596MW
1,444MW
Potência reativa de referência:
-1MVAr
1MVAr
Potência mecânica disponível:
1,52MW
1,52MW
Velocidade média do vento:
12m/s
12m/s
Nessa simulação foi imposta uma situação extrema para a estratégia de controle
objetivando avaliar sua performance e se esta seria capaz de manter as potências ativa e
reativa nos seus valores de referência. Os resultados provenientes dessa simulação são
apresentados a seguir.
6
Pger (W)
2
x 10
Potencia ativa, Potencia reativa e fator de potencia
1.5
1
(a)
0.5
6
Qger (Var)
2
x 10
50
100
150
200
250
300
0
(b)
-2
50
100
150
200
250
300
1
FPger
0.8
0.6
0.4
(c)
50
100
150
tempo (s)
200
250
300
Figura 56-Curvas de (a) Potência ativa (b) Potência reativa (c) Fator de potência. Simulação IV.
A Figura 56 mostra as curvas de potência ativa, potência reativa e fator de
potência respectivamente. Nessa figura pode-se notar que, no intervalo de tempo entre
9s e 150s, a potência ativa de referência está em um valor próximo de 1,596MW e que no
período compreendido entre 150s e 300s a mesma vale aproximadamente 1,444MW.
72
Capítulo 6 - A Estratégia de Controle
Para a potência reativa no intervalo entre 9s e 150s essa potência está em um valor
próximo de -1MVAr e no intervalo entre 150s e 300s a mesma está em torno de 1MVAr.
Dessa forma o fator de potência do aerogerador, no intervalo de tempo entre 9s e 150s,
está em um valor próximo de 0,85 indutivo e no período compreendido entre 150s e 300s
o mesmo vale aproximadamente 0,82 capacitivo.
Ainda com relação a Figura 56 tem-se um desvio da potência ativa em relação ao
valor de referência, no intervalo de 145s a 150s, que oscila entre -2,14% e 2,13%.
Adicionalmente tem-se um desvio da ordem de -0,026% para potência reativa em relação
ao seu valor de referência. Já no intervalo de tempo que vai 280s a 300s tem-se um
desvio da potência ativa em relação ao valor de referência que está entre –1,49% e
1,50%. O desvio da potência reativa está em torno de -0,0017%, em relação ao seu valor
de referência.
A Figura 57 apresenta as curvas de potência mecânica, potência ativa e potência
no rotor do GIDA. Pode-se observar que a potência mecânica tem um valor médio
próximo de 1,45MW entre 145s e 150s. Já no intervalo de tempo que vai de 280s a 300s
a potência mecânica média vale aproximadamente 1,54MW. A potência ativa no rotor do
GIDA tem um valor médio, no intervalo de 145s a 150s, próximo de -172kW e no intervalo
de tempo entre 280s e 300s a mesma vale aproximadamente 66kW.
6
Potencia mecanica, Potencia ativa e Potencia no rotor
Pmec (W)
1.6
x 10
1.5
(a)
1.4
6
P ger (W)
2
x 10
50
100
150
200
250
300
1.5
1
(b)
0.5
5
P rotor (W)
2
x 10
50
100
150
200
250
300
0
-2
-4
(c)
50
100
150
tempo (s)
200
250
300
Figura 57-Curvas de (a) Potência mecânica (b) Potência ativa (c) Potência no rotor. Simulação IV.
73
Capítulo 6 - A Estratégia de Controle
Velocidade mecanica do aerogerador
RPMeixo alta velocidade
2000
1900
1800
1700
1600
(a)
50
100
150
200
250
300
RPMeixo baixa velocidade
20
19
18
17
16
(b)
50
100
150
tempo (s)
200
250
300
Figura 58-Curvas de (a) Velocidade mecânica eixo de alta rotação (b) Velocidade mecânica eixo de
baixa rotação. Simulação IV.
Pode-se notar um desvio na potência mecânica gerada pela turbina eólica. Esse
desvio se deve ao fato da velocidade tangencial da turbina eólica influenciar na geração
de potência mecânica conforme mostra a equação (6-17). Como a velocidade mecânica
do aerogerador está diminuindo no intervalo de tempo entre 9s e 150s (ver Figura 58), vai
haver uma diminuição da potência mecânica. Já no intervalo que vai de 150s a 300s a
aceleração do aerogerador vai causar um aumento da potência mecânica.
A Figura 58 mostra as curvas de velocidade dos eixos de alta e baixa rotação
respectivamente. Nessa figura observa-se que, a partir dos 5s, quando a estratégia de
controle é habilitada, ocorre uma aceleração do aerogerador. Essa aceleração é devida á
acomodação da potência elétrica, a qual leva em torno de 4,5s para atingir o valor de
referência. Após a potência elétrica assumir o seu valor de referência, toda a potência de
aceleração vai reduzindo gradativamente, o que faz com que o aerogerador desacelere
suavemente. No intervalo de tempo que vai de 5s a 150s, o aerogerador atinge uma
velocidade máxima de em torno de 1861rpm e próximo do regime permanente sua
velocidade está em torno de 1624rpm.
A partir dos 150s o aerogerador volta a acelerar, mas desta vez de forma mais
suave. Essa característica faz com que o aumento de potência no rotor do GIDA se dê
forma gradativa, acompanhando a característica de aceleração da máquina. Dessa forma
o aerogerador vai atingir uma velocidade, próxima do regime permanente, em torno de
1896rpm.
Capítulo 6 - A Estratégia de Controle
74
A Tabela 9 e a Tabela 10 apresentam um resumo das principais grandezas
envolvidas no aerogerador durante os intervalos de tempo compreendidos entre 145s e
150s e entre 280s e 300s, respectivamente. Para esses intervalos os valores médios
foram obtidos quando a velocidade mecânica do aerogerador já se encontrava
estabilizada.
O balanço de potência para o intervalo de tempo entre 145s e 150s é dado pela
relação abaixo:
Pentrada = Psaida
(6-20)
Pmec + Protor + Pacel = Pestator + Pperdas + Pmag
(6-21)
que expandida resulta em:
onde Pacel no caso da simulação IV, no intervalo citado, é a potência desacelerante e Protor
no caso da simulação IV, no intervalo citado, é a potência consumida pelo rotor do
conversor de freqüência.
Já para o período compreendido entre 280s e 300s é utilizada a relação anterior
para fechar o balanço de potência a qual, na forma expandida, resulta em:
Pmec = Pestator + Pperdas + Pmag + Protor + Pacel
(6-22)
onde Pacel no caso da simulação IV, no intervalo citado, é a potência acelerante e Protor no
caso da simulação IV, no intervalo citado, é a potência consumida pelo conversor de
freqüência.
Os diagramas de blocos da Figura 59 mostram as potências envolvidas no
balanço energético do GIDA.
+Â ÈÉ Ê+ËÌÍ Æ6ÅÃ
ÅÃÇÆÌÃ+Ò ÃÄ)ÆØÙ'È
Â+ÈÉ)Ê+ËÌÍ Æ
Ó Ã ÌÔ+Ë'Í ÌÆ
ÂÃÄ)ÅÆÇ
Á
Â+ÈÉ)ÊËÌÍ Æ6Æ+Ä Ó Æ ÚÃ+ËÆÅÆ
ËÈ ÌÆ Ó Û È Ó Æ*Ð ËÜÉÍ ÌÈ
Â+ÈÉ Ê*ËÌÍ Æ
ËÈ}Ä ÈÉ)ÈÄ
ÕÖ
×È+ËÏÃÄÇÈÄ
Â*ÈÉ Ê+ËÌÍ Æ ÃÎ ÃÉÍ ÏÆ
ÃËÉÄ ÃÐ*ÑÃ4Æ4Ä)ÃÅÃ
ÃÒ ÃÉÄ)Í ÌÆ
(a)
(b)
Figura 59-Diagrama de blocos que ilustra o balanço de potência no GIDA para a simulação IV no intervalo de:
(a)145s a 150s. e (b)280s a 300s
75
Capítulo 6 - A Estratégia de Controle
Tabela 9-Resultados obtidos na simulação IV no intervalo de tempo entre 145s e 150s.
Potência mecânica:
1.453.752,68W
Potência no estator:
1.596.657,42W
Perdas:
Potência no rotor:
28.987,99W
-172.608,17W
Potência de aceleração:
-1.234,71W
Potência no campo magnético:
41.972,82W
Potência de entrada:
1.627.595,56W
Potência de saída:
1.667.618,23W
Erro relativo entre potência de entrada e potencia de saída:
-2.46%
Potência máxima no estator:
1.630.120,06W
Potência mínima no estator:
1.561.971,60W
Ripple máximo de potência no estator:
Potência reativa no estator:
Fator de Potencia:
68.148,46W
-1.000.256,74VAr
0,847 indutivo
Velocidade mecânica média:
1.624rpm
Valor de pico da corrente no estator:
2.048,82A
Valor de pico da corrente no rotor:
1.823,51A
Tabela 10-Resultados obtidos na simulação IV no intervalo de tempo entre 280s e 300s.
Potência mecânica:
1.537.369,66W
Potência no estator:
1.444.081,34W
Perdas:
Potência no rotor:
Potência de aceleração:
Potência no campo magnético:
38.392,73
65.883,45W
994,99W
28.161,23W
Potência de entrada:
1.537.369,66W
Potência de saída:
1.577.513,74W
Erro relativo entre potência de entrada e potencia de saída:
-2,61%
Potência máxima no estator:
1.465.561,47W
Potência mínima no estator:
1.422.300,32W
Ripple máximo de potência no estator:
43.261,15W
Potência reativa no estator:
1.000.016,62VAr
Fator de Potencia:
0,822 capacitivo
Velocidade mecânica média:
1896rpm
Valor de pico da corrente no estator:
1.904,28A
Valor de pico da corrente no rotor:
2.484,79A
Capítulo 6 - A Estratégia de Controle
76
4. Sumário do capítulo.
Neste capítulo foi apresentada a estratégia de controle da potência. Os resultados
apresentados evidenciam os diversos aspectos inerentes ao aerogerador de velocidade
variável e da estratégia de controle, tais como o desacoplamento das dinâmicas elétrica e
mecânica e a potência elétrica entregue a rede livre de flutuação em baixa freqüência. Os
resultados mostram que a estratégia de controle é estável e permite obter o controle da
potência ativa e reativa entregues pelo estator do GIDA.
Capítulo 7 - Conclusões
77
Capítulo 7
Conclusões.
1. Considerações gerais.
Hoje em dia há uma tendência mundial do uso de fontes de energia renováveis
para a geração de energia elétrica. Entre as diversas fontes renováveis se destaca a
energia eólica, a qual se desenvolveu substancialmente nas últimas décadas.
Apesar de ser uma tecnologia consolidada e bastante utilizada, principalmente em
países europeus, no Brasil a energia eólica ainda carece de maior desenvolvimento. A
criação do PROINFA pode ser o catalisador inicial e tanto as empresas estatais quanto as
empresas privadas devem despertar seu interesse para a produção de energia elétrica
através da utilização dos ventos. O País possui bons ventos, principalmente no litoral
nordestino, o que torna essa região propicia para implantação de aerogeradores.
Com o incentivo à implantação de parques eólicos no Brasil através do
PROEÓLICA, futuramente pode-se ter uma parcela da geração de energia elétrica advinda
dos aerogeradores. Se isto realmente vier a se tornar realidade quais serão as influências
que este tipo geração terá sobre o sistema elétrico? Como será a interação dos
geradores eólicos com o sistema de geração hidráulico? Será possível gerar energia
elétrica de qualidade, sendo que a fonte primária fornece uma potência flutuante?
A conexão de um gerador eólico de grande porte a uma rede de distribuição é um
tema que gera preocupações técnicas devido à falta de experiência do Brasil na área de
energia eólica. As oscilações de potência em baixas freqüências, a penetração dos
efeitos de flutuação de neutro no sistema de distribuição e, principalmente, a iteração
entre os aerogeradores e as máquinas hidráulicas que suprem uma determinada região,
são assuntos que devem ser levados em conta na operação de um sistema com muitos
aerogeradores.
2. Conclusões.
No capítulo seis, foi realizada a interação dos diversos modelos apresentados no
decorrer do trabalho e apresentada a estratégia de controle da potência entregue pelo
aerogerador.
As simulações mostraram que é possível produzir uma potência elétrica de
qualidade e fornecê-la por um intervalo de tempo bem longo. As simulações também
mostraram que é possível subcarregar ou sobrecarregar o aerogerador fazendo com que
o rotor do gerador de indução forneça ou absorva a falta ou excesso de potência
78
Capítulo 7 - Conclusões
mecânica. Embora esta operação não seja viável economicamente, teoricamente ela é
sustentável e dá folga para os ajustes de despacho no sistema elétrico.
As simulações mostraram que a estratégia de controle trabalha muito bem quando
os valores de potência de referência estão próximos da potência mecânica disponível.
Nesse caso o desvio, entre a potência de entrada e a potência de saída do GIDA, é
mínimo. O “ripple” de potência é pequeno e as velocidades dos eixos de alta e baixa
rotação se estabilizam em valores baixos, apesar da aceleração intensa que ocorre
quando a estratégia de controle é aplicada pela primeira vez.
Quando
são
estabelecidas
situações
mais
críticas
ao
sistema
aerogerador/controle de potência, há um considerável aumento do “ripple” de potência, e
o desvio, entre a potência de entrada e a potência de saída do GIDA, aumenta
razoavelmente. Mesmo assim a potência de referência é mantida por vários ciclos no seu
valor estipulado e a velocidade atinge valores maiores, mas dentro dos limites nominais
do aerogerador.
A resposta da estratégia de controle é eficiente, o que permite aliviar o sistema
convencional de geração fazendo com que o GIDA possa responder, teoricamente, pelo
despacho de potência de forma praticamente instantânea.
A utilização de despachos programados de potência constante em GIDAS alivia a
ação dos geradores de oscilação do sistema elétrico. Esta característica é importante em
sistemas com predominância de geradores hidráulicos, pois estes precisam de um tempo
mais longo para realizar o ajuste da potência elétrica.
É importante observar que os despachos devem ser refeitos após mudanças
significativas na velocidade do vento, através da estratégia de controle proposta. Dessa
forma as variações de potência podem ser feitas de acordo com o tempo necessário à
ação dos geradores de oscilação.
3. Trabalhos futuros.
São sugeridos os seguintes trabalhos futuros:
•
Simulação do aerogerador/controle das potências ativa e reativa em um sistema
elétrico multi-máquinas, já que neste trabalho foi simulado o conjunto
aerogerador/controle das potências ativa e reativa contra barramento infinito;
•
Avaliar o modelo em estudos de estabilidade, tais como curto-circuito e variação
dinâmica de tensão. Neste caso deve ser incluído no modelo as características do
eixo da turbina eólica;
•
Estudo multi-máquinas (fazendas eólicas);
•
Montagem de protótipo de bancada em potência reduzida;
Capítulo 7 - Conclusões
•
79
Aprimoramento do sistema de controle utilizado para tratar os resíduos de
potência ativa e reativa;
•
Estudo da viabilidade econômica da implantação do sistema de controle das
potências ativa e reativa em um aerogerador;
•
Estudo de um aerogerador/estratégia de controle das potências ativa e reativa
quando o mesmo possui monitoramento remoto.
[tag33]
[tag42]
[tag41]
v cr
Vc v cr
[tag37]
v or
v dr
v qr
[tag35]
[tag34]
[tag38]
[tag44]
[tag43]
Rel. engr.
-K-
v elocidade do v ento
abc_qdr
beta
v nr
v br
Vb v br
[tag36]
v ar
Tensões [tag32]
do rotor
v os
v ds
v qs
abc_qds
teta
Va v ar
teta do
estator
velocidade dos
eixos q e d
[tag40]
1
s
wb
[tag34]
v ns
v cg
[tag31]
v bg
v bs
v cs
Tensões do estator
v ag
v as
[tag53]
[tag52]
[tag51]
out_psior
out_psidr
out_psiqr
out_psios
out_psids
out_psiqs
Pt
Vel. Vento
Turbina eólica
Tem
angulo das pás
rpm
wt
Conjugado turbina
psi_qdo
Vel. v ento
wr
w
v or
v dr
v qr
v os
v ds
v qs
beta
Idr
Iqr
Ids
Iqs
Perdas no
cobre qd0
Pcr_qd
Pcs_qd
v ento
Pt
rpm
wt
Tt
Figura A-1-Diagrama de blocos do Simulink® utilizado na simulação do aerogerador.
Qref
Pref
-K-
ior
idr
iqr
ios
ids
iqs
[tag43]
[tag43]
Rel. engr
iqdo
[tag44]
psior
psidr
psiqr
psios
psids
psiqs
[tag37]
[tag44]
v ds
v qs
ids
iqs
Pmi
Ics
Vcs
Ibs
Ss
FP
Qs
Ps
Ss
FP
Q
P
[tag37]
[tag36]
Ics
Ibs
Ias
Icr
Ibr
Iar
f req rotor
ids
Vcr
Vbr
Var
Step
Dinâmica do Rotor
s
wr_elet
psiqs
Tmech
wr_mec
out_Tem
psids
icr
ibr
iar
Ics
Ibs
Ias
iqs
qdr_abcr
beta
Ior
Idr
Iqr
qds_abcs
teta
Ios
Ids
Iqs
[tag53]
[tag52]
[tag51]
Controle da potência
beta
Qref
Pref
v ds
v qs
idr
iqr
ids
iqs
Potencia ativa reativa
& Fp
Pmi
Vbs
Ias
Vas
s
[tag42]
[tag40]
[tag41]
fr
wele
Tem
[tag56]
[tag55]
[tag54]
-K-
[tag56]
[tag55]
[tag54]
[tag56]
[tag55]
[tag54]
Pcr
Var
Vbr
Sr
Onda
Triangular
Potência
no rotor
Icr
Ibr
Iar
Vcr
Gain2
-K-
Vcc
[tag33]
VNR
Ins Vnr
VNS
Ins Vns
[tag38]
[tag35]
Teta rotor
1
s
rpm_mec
Perdas
no cobre
Icr
Ibr
Iar
Ics
Ibs Pcs
Ias
Vdc
Vcn
Vbn
VSC com
modulacao
Triangular
PWM
Vref
Van
Product11
Triangular
[tag32]
[tag31]
[tag40]
Gain
J/2
du/dt
[tag41]
Derivative
[tag42]
Apêndice A
80
Apêndice A
Diagrama de blocos do modelo do aerogerador.
81
Apêndice B
Apêndice B
Condições iniciais das variáveis de estado.
Neste apêndice a Tabela B-1 e a Tabela B-2 mostram as condições iniciais, das
variáveis de estado, que foram impostas ao modelo do aerogerador.
No caso da Tabela B-1 são mostradas as condições iniciais que foram utilizadas
nas simulações I, II e IV. A Tabela B-2 mostra as condições iniciais que foram utilizadas
na simulação III.
Tabela B-1-Condições iniciais das variáveis de estado para as simulações I, II, e IV.
Variável de estado
Designação
Valor inicial
Unidade
624,6844
Volts
-2,5629
Volts
ψ qs
Enlace de fluxo de eixo em quadratura
do estator
ψ ds
Enlace de fluxo de eixo direto do estator
ψ qr
Enlace de fluxo de eixo em quadratura
do rotor
594,5260
Volts
ψ dr
Enlace de fluxo de eixo direto do rotor
-78,3835
Volts
ωr
Velocidade mecânica do rotor da
máquina de indução
189,8569
rad/s
θe
Posição dos eixos direto e em
quadratura do estator
0
rad
θr
Posição dos eixos direto e em
quadratura do rotor
0
rad
ωt
Velocidade mecânica do rotor da turbina
eólica
1,898569
rad/s
β
Posição das pás do rotor da turbina
eólica
5,7725
graus
-
Valor inicial do bloco integrador do
controlador PI utilizado para tratar o
resíduo de potência ativa
0
Watt
-
Valor inicial do bloco integrador do
controlador PI utilizado para tratar o
resíduo de potência reativa
0
VAr
82
Apêndice B
Tabela B-2-Condições iniciais das variáveis de estado para a simulação III.
Variável de estado
Designação
Valor inicial
Unidade
624,7334
Volts
-2,5761
Volts
ψ qs
Enlace de fluxo de eixo em quadratura
do estator
ψ ds
Enlace de fluxo de eixo direto do estator
ψ qr
Enlace de fluxo de eixo em quadratura
do rotor
594,3348
Volts
ψ dr
Enlace de fluxo de eixo direto do rotor
-79,2917
Volts
ωr
Velocidade mecânica do rotor da
máquina de indução
189,8734
rad/s
θe
Posição dos eixos direto e em
quadratura do estator
0
rad
θr
Posição dos eixos direto e em
quadratura do rotor
0
rad
ωt
Velocidade mecânica do rotor da turbina
eólica
1,898734
rad/s
β
Posição das pás do rotor da turbina
eólica
5,7286
graus
-
Valor inicial do bloco integrador do
controlador PI utilizado para tratar o
resíduo de potência ativa
0
Watt
-
Valor inicial do bloco integrador do
controlador PI utilizado para tratar o
resíduo de potência reativa
0
VAr
Bibliografia
83
Bibliografia
[1] AGÊNCIA NACIONAL DE ENERGIA ELÉTRICA, ”Energia Eólica”. Atlas de Energia
Elétrica do Brasil, 1°ed., capitulo 5, Brasília, Brasil, 2002.
[2] ALDABÓ, RICARDO, Energia Eólica. São Paulo: Artliber Editora Ltda, 2002.
[3] MULLER S., DEICKE, M., DE DONCKER, R.W., “Doubly Fed Induction Generator
Systems for Wind Turbines”, Industry Applications Magazine, IEEE, v.8, n.3, pp.
26-33, May-June 2002.
[4] SLOOTWEG, J.G.; POLINDER, H.; KLING, W.L., “Dynamic Modeling of a Wind
Turbine with Doubly Fed Induction Generator”, Power Engineering Society
Summer Meeting, IEEE, v.1, pp. 644 -649, 2001.
[5] VINAGRE, M.P., BARBOSA, P.G., PEREIRA, M.M., CARLETTI, R., “A Strategy for
Delivery of Constant Electric Power in Doubly Fed Induction Generators”, 7°
Congresso Brasileiro de Eletrônica de Potência, Fortaleza, CE, 2003.
[6] MUTSCHLER, P.; HOFFMANN, R., “Comparison of Wind Turbines Regarding their
Energy Generation Power”, Electronics Specialists Conference, pesc, IEEE 33rd
Annual, v.1, pp. 6 -11, Feb. 2002.
[7] HOFMANN, W.; OKAFOR, F., “Optimal Control of Doubly-Fed Full-Controlled
Induction Wind Generator with High Efficiency”, Industrial Electronics Society,
IECON’01. The 27th Annual Conference of the IEEE, v.2, pp.1213-1218, Nov. Dec. 2001.
[8] BOGALECKA, E., “Dynamics of the Power Control of a Double Fed Induction
Generator Connected to the Soft Power Grid”, Industrial Electronics, Conference
Proceedings, ISIE'93-Budapest, IEEE International Symposium on, pp.509-513,
June 1993.
[9] MACHMOUM, M.; POITIERS, F.; DARENGOSSE, C.; QUERIC, A., “Dynamic
Performances of a Doubly-Fed Induction Machine for a Variable-Speed Wind
Bibliografia
84
Energy Generation”, Power System Technology, Proceedings. Power Con
International Conference on, v. 4, pp.2431-2436, Oct. 2002.
[10] LEITHEAD, W.E.; CONNOR, B.; “Control of a Variable Speed Wind Turbine with
Induction Generator”, Control '94, International Conference on, v.2, pp.1215-1220,
Mar. 1994.
[11] LEITHEAD, W.E.; DE LA SALLE, S.A.; REARDON, D.; GRIMBLE, M.J.,”Wind
Turbine Modeling and Control”. Control '91, International Conference on, v.1, pp.16, Mar. 1991.
[12] NOVAK, P.; EKELUND, T.; JOVIK, I.; SCHMIDTBAUER, B., “Modeling and Control
of Variable-Speed Wind-Turbine Drive-System Dynamics", Control Systems
Magazine, IEEE, v.15, n.4, pp.28-38, Aug. 1995.
[13] JANGAMSHETTI, S.H.; GURUPRASADA RAU, V., “Normalized Power Curves as a
Tool for Identification of Optimum Wind Turbine Generator Parameters”, Energy
Conversion, IEEE Transactions on, v.16, n.3, pp.283-288, Sept. 2001.
[14] SLOOTWEG, J.G.; POLINDER, H.; KLING, W.L., “Initialization of Wind Turbine
Models in Power System Dynamics Simulations”, Power Tech Proceedings, IEEE,
Porto, v.4, 6 pp., 2001.
[15] EDUARD MULIJADI, BUTTERFIELD, C.P., “Pitch-Controlled Variable Speed Wind
Turbine Generation”, IEEE Transactions Industry Applications, v.37, pp. 240-245,
Jan.-Feb. 2001.
[16] SLOOTWEG, J.G.; DE HAAN, S.W.H.; POLINDER, H.; KLING, W.L.; “General Model
for Representing Variable Speed Wind Turbines in Power System Dynamics
Simulations”, Power Systems, IEEE Transactions on, v.18, n.1 , pp.144 -151, Feb.
2003.
[17] LANDER, CYRIL W., “Conversão de Freqüência”, Eletrônica Industrial: Teoria e
Aplicações, 2° edição, Capítulo 5, São Paulo: Makron Books do Brasil Editora
Ltda, 1996.
Bibliografia
85
[18] N. MOHAN, T.M. UNDELAND, W.P. ROBBINS., “Switch-Mode dc-ac inverters: dc Ý
Sinusoidal ac, In: Steven Elliot, Sean M. Culhane, Savoula Amanatidis (eds),
Power Electronics: Converters. Applications and Design, chapter 8, New York. US:
John Wiley & Sons Ltd, 1994.
[19] WEG, Catálogo geral de motores elétricos. Weg Motores, Jan 2001.
[20] KRAUSE PAUL C., “Theory of Symmetrical Induction Machines”, In: Sanjeev Rao
(Ed), Analysis of Electric Machinery, chapter 4, USA: McGraw Hill Inc, 1986.
[21] FITZGERALD, A. E., KINGSLEY,C., KUSKO, A., “Motores de indução, Regime
Permanente”, Máquinas Elétricas. Capítulo 7. Rio de Janeiro: Editora McGrawHill do Brasil, 1975.
[22] CARVALHO P. A., ESTANQUEIRO A. I., FEITOSA E. A., PEREIRA A. L. Guia de
Projeto Elétrico de Centrais Eólicas - Volume 1 – Projeto Elétrico e Impacto de
Centrais Eólicas na Rede Elétrica. Recife, 2003.
[23] SLOOTWEG, J.G.; KLING, W.L., “Is the Answer Blowing in The wind?” Power and
Energy Magazine, IEEE, v.1, n.6, pp.26-33, Nov.-Dec. 2003.
[24] ANDERSON, P.M.; BOSE, A. “Stability Simulation of Wind Turbine Systems,” IEEE
Transactions on Power Apparatus. and Systems, v. pas-102, pp.3791-3795, Dec. 1983.