UNIVERSIDADE FEDERAL DO ABC
Programa de Pós-Graduação em Energia
Câmpus de Santo André - SP
VINICIUS PRADO SUPPIONI
MÉTODOS DE COMPENSAÇÃO DE DESEQUILÍBRIOS
DE TENSÃO DA REDE ELÉTRICA COM O USO DE
GERADORES DE INDUÇÃO DUPLAMENTE
ALIMENTADOS
Santo André - SP
2016
V INICIUS P RADO S UPPIONI
T ESE DE D OUTORADO
MÉTODOS DE COMPENSAÇÃO DE DESEQUILÍBRIOS
DE TENSÃO DA REDE ELÉTRICA COM O USO DE
GERADORES DE INDUÇÃO DUPLAMENTE
ALIMENTADOS
Tese apresentada ao Programa de PósGraduação em Energia da Universidade
Federal do ABC - UFABC como parte
dos requisitos para obtenção do título de
Doutor em Energia.
Profa. Dra. Ahda Pionkoski Grilo Pavani
Orientador
Prof. Dr. Julio Carlos Teixeira
Coorientador
Santo André - SP
2016
Aos meu pais, Dimas e Cleonice, pelo carinho e paciência em todos estes anos. Aos que
caminharam ao meu lado durante este processo, que com suas palavras de incentivo se
tornaram pontes sobre os obstáculos mais difíceis.
AGRADECIMENTOS
À minha orientadora, Profa. Dra. Ahda Pionkoski Grilo Pavani, por toda confiança, pelos
ensinamentos, e por sua parceria durante tantos anos. A ela se deve todo o meu crescimento
como pesquisador e o sucesso obtido perante este grande desafio.
Ao meu coorientador, Prof. Dr. Julio Carlos Teixeira, por todos os questionamentos e
discussões enriquecedoras durante o desenvolvimento da Tese.
À Universidade Federal do ABC, pela possibilidade de desenvolvimento deste trabalho e
por dar as condições necessárias para que ele fosse realizado.
À Capes, pelo suporte financeiro.
Aos colegas de mestrado e doutorado, pelas conversas e por dividir as incertezas e alegrias
durante todo o caminho.
À minha família, pelo apoio incondicional durante todos estes anos, pelo abrigo e por todo
carinho.
À Deus pela força, coragem e pelas ideias salvadoras que aparecem naquelas madrugadas
em que nada parece funcionar.
“Não faças de ti um sonho a realizar.,”
Vai. Sem caminho marcado.
Tu és o de todos os caminhos.
Cecília Meireles
RESUMO
Neste trabalho foi desenvolvida uma metodologia de controle que permite ao gerador de
indução duplamente alimentado, do inglês: doubly fed induction generator - DFIG, compensar
os desequilíbrios de tensão do ponto de conexão do gerador com a concessionária. Para isso,
foram consideradas a configuração série do DFIG, em que o conversor do lado da rede está
conectado em série, e a configuração tradicional do DFIG com um restaurador dinâmico de tensão associado a ela. A metodologia de controle proposta permite compensar o desequilíbrio de
tensão e minimiza as oscilações de torque produzidas por correntes desequilibradas no gerador,
as quais podem reduzir a sua vida útil. Além disso, foi proposta uma solução para a operação
no regime subsíncrono do DFIG na configuração série, na qual a saturação do fluxo concatenado, devido à elevação da tensão do estator, é uma limitação. A modelagem das metodologias
propostas e simulações foram feitas em ambiente Matlab - Simulink, onde foram gerados os
resultados necessários para sua validação.
Palavras-chave: Energia Eólica. Gerador de Indução Duplamente Alimentado. Conversor
Série. Desequilíbrio de Tensão.
ABSTRACT
In the present work it has been developed a control methodology allowing to the Doubly Fed
Induction Generator (DFIG) to compensate the voltage unbalance at the Point of Commom
Coupling (PCC). This methodology was implemented in the series configuration of the DFIG,
which the Grid Side Converter is series connected to the grid, and in the traditional configuration
of the DFIG with a Dynamic Voltage Restorer associated. The proposed methodology allows
compensating the voltage unbalance at the PCC and reduces the electromagnetic toque oscillations produced by the unbalanced currents at the generator windings, which can compromise
the machine service life. Furthermore, it has been proposed a solution to avoid increasing the
stator voltage at the subsynchronous operation of the series configuration of the DFIG, which
is a limitation due to the saturation of the electromagnetic flux. The proposed methodologies
were modeled and simulated at the Matlab - Simulink environment, where the results required
for the methodology validation was obtained.
Keywords: Wind Energy. Doubly Fed Induction Generator. Series Converter. Voltage Unbalance.
LISTA DE FIGURAS
Figura 1
Curvas CP − λ baseadas nos coeficientes de Heier para diferentes ângulos de
passo.
Figura 2
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
Curvas CP − λ baseadas nos coeficientes de Slootweg para diferentes ângulos
de passo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
. . . . . . . . . . . . . . .
19
Figura 3
Curvas de potência da turbina implementada.
Figura 4
Modelo de duas massas para o acoplamento mecânico da turbina. Fonte:
Adaptado de: (IOV et al., 2004) . . . . . . . . . . . . . . . . . . . . . .
20
Figura 5
DFIG e seus conversores. . . . . . . . . . . . . . . . . . . . . . . . . .
23
Figura 6
Regiões de operação da turbina. . . . . . . . . . . . . . . . . . . . . . .
24
Figura 7
Diagrama de blocos do controle do RSC .
. . . . . . . . . . . . . . . . .
25
Figura 8
Diagrama de blocos do controle do GSC.
. . . . . . . . . . . . . . . . .
26
Figura 9
Circuito equivalente da Máquina de Indução.
. . . . . . . . . . . . . . .
27
Figura 10
Impacto do desequilíbrio de tensão na máquina de indução. Fonte: Adaptado
de: (WOLL, 1975) . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
Figura 11
Filtro baseado em um integrador generalizado. . . . . . . . . . . . . . . .
37
Figura 12
Filtro baseado em um integrador generalizado de segunda ordem. . . . . . .
37
Figura 13
Diagrama de blocos do DSOGI−QSG.
. . . . . . . . . . . . . . . . . .
38
Figura 14
Circuito equivalente simplificado de uma linha de transmissão. . . . . . . .
42
Figura 15
Sistema implementado - DFIG.
. . . . . . . . . . . . . . . . . . . . . .
43
Figura 16
Controles do RSC - Tensão no estator. . . . . . . . . . . . . . . . . . . .
45
Figura 17
Controles do RSC - Corrente no estator. . . . . . . . . . . . . . . . . . .
45
Figura 18
Controles do RSC - Corrente no rotor. . . . . . . . . . . . . . . . . . . .
46
Figura 19
Controles do RSC - Corrente do GSC. . . . . . . . . . . . . . . . . . . .
46
Figura 20
Controles do RSC - Variáveis do ponto de operação da máquina. . . . . . .
47
Figura 21
Controles do RSC - Potências ativa e reativa do estator. . . . . . . . . . . .
47
Figura 22
Controles do RSC - Potências ativa e reativa do GSC. . . . . . . . . . . . .
48
Figura 23
Controles do RSC - Potências ativa e reativa totais do DFIG. . . . . . . . .
48
Figura 24
Controle coordenado - Tensões no PCC e no estator. . . . . . . . . . . . .
49
Figura 25
Controle coordenado - Corrente no estator. . . . . . . . . . . . . . . . . .
50
Figura 26
Controle coordenado - Corrente no rotor. . . . . . . . . . . . . . . . . . .
51
Figura 27
Controle coordenado - Corrente do GSC. . . . . . . . . . . . . . . . . . .
51
Figura 28
Controle coordenado - Variáveis do ponto de operação da máquina. . . . . .
52
Figura 29
Controle coordenado - Potências ativa e reativa do estator. . . . . . . . . . .
53
Figura 30
Controle coordenado - Potências ativa e reativa do GSC. . . . . . . . . . .
53
Figura 31
Controle coordenado - Potências ativa e reativa totais do DFIG. . . . . . . .
54
Figura 32
Diagrama de blocos do TI-SGSC. . . . . . . . . . . . . . . . . . . . . .
57
Figura 33
Diagrama trifásico e circuito equivalente do TI-SGSC. . . . . . . . . . . .
58
Figura 34
Diagrama de blocos do controle de sequência negativa do RSC. . . . . . . .
61
Figura 35
Exemplo de troca de potência por meio do SGSC.
. . . . . . . . . . . . .
62
Figura 36
Diagrama de blocos do controle de sequência positiva do SGSC.
. . . . . .
63
Figura 37
Diagrama de blocos do controle de sequência negativa do SGSC. . . . . . .
64
Figura 38
Sistema implementado - DFIG com conversor série associado.
. . . . . . .
66
Figura 39
DFIG com conversor série associado - Tensões no PCC e no estator. . . . . .
67
Figura 40
DFIG com conversor série associado - Corrente na carga. . . . . . . . . . .
68
Figura 41
DFIG com conversor série associado - Correntes no estator e no rotor. . . . .
68
Figura 42
DFIG com conversor série associado - Corrente no GSC. . . . . . . . . . .
69
Figura 43
DFIG com conversor série associado - Te, Vdc e wr. . . . . . . . . . . . .
70
Figura 44
DFIG com conversor série associado - Potências ativa e reativa do estator e
Figura 45
do DFIG. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
DFIG com conversor série associado - Potências ativa e reativa do GSC. . . .
71
Figura 46
DFIG com conversor série associado - Potências ativa e reativa do SGSC. . .
71
Figura 47
DFIG com conversor série associado - Potências ativa e reativa do RSC. . . .
72
Figura 48
Configuração série do DFIG. . . . . . . . . . . . . . . . . . . . . . . . .
75
Figura 49
DFIG série - Diagrama de blocos do controle tradiconal de sequência positiva
do SGSC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
76
Figura 50
Sistema implementado - DFIG série. . . . . . . . . . . . . . . . . . . . .
76
Figura 51
DFIG série - Injeção de corrente - Tensões no PCC e no estator. . . . . . . .
78
Figura 52
DFIG série - Injeção de corrente - Corrente na carga. . . . . . . . . . . . .
78
Figura 53
DFIG série - Injeção de corrente - Correntes no estator e no rotor. . . . . . .
79
Figura 54
DFIG série - Injeção de corrente - Te, Vdc e wr.
. . . . . . . . . . . . . .
79
Figura 55
DFIG série - Injeção de corrente - Potências ativa e reativa do estator e do DFIG. 80
Figura 56
DFIG série - Injeção de corrente - Potências ativa e reativa do SGSC. . . . .
80
Figura 57
DFIG série - Injeção de corrente - Potências ativa e reativa do RSC. . . . . .
81
Figura 58
DFIG série - Exemplos dos controles por defasagem de tensão e por defasagem de tensão e corrente. . . . . . . . . . . . . . . . . . . . . . . . . .
82
Figura 59
DFIG série - Diagrama de blocos do controle de potência proposto. . . . . .
83
Figura 60
DFIG série - Diagrama de blocos do controle de sequência positiva do RSC.
84
Figura 61
DFIG série - Controle do SGSC - Te, wr. . . . . . . . . . . . . . . . . . .
85
Figura 62
DFIG série - Controle do SGSC - Tensão do estator e nos terminais do DFIG.
85
Figura 63
DFIG série - Controle do SGSC - Correntes do estator e rotor. . . . . . . . .
86
Figura 64
DFIG série - Controle do SGSC - Tensão e corrente no PCC. . . . . . . . .
86
Figura 65
DFIG série - Controle do SGSC - Potências do estator e do DFIG. . . . . . .
87
Figura 66
DFIG série - Controle do SGSC - Potências ativa e reativa no PCC. . . . . .
87
Figura 67
DFIG série - Controle do SGSC - Potências nos SGSC’s. . . . . . . . . . .
88
Figura 68
DFIG série - Controle do SGSC - Tensões dos links DC. . . . . . . . . . .
88
Figura 69
DFIG série - Controles propostos ativos - Te, wr. . . . . . . . . . . . . . .
89
Figura 70
DFIG série - Controles propostos ativos - Tensões do estator e nos terminais
do DFIG. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
90
Figura 71
DFIG série - Controles propostos ativos - Correntes do estator e rotor. . . . .
91
Figura 72
DFIG série - Controles propostos ativos - Tensão e corrente no PCC. . . . .
92
Figura 73
DFIG série - Controles propostos ativos - Potência do estator da máquina. . .
92
Figura 74
DFIG série - Controles propostos ativos - Potência nos terminais do DFIG. .
93
Figura 75
DFIG série - Controles propostos ativos - Potências ativa e reativa no PCC. .
93
Figura 76
DFIG série - Controles propostos ativos - Potências dos SGSC’s. . . . . . .
93
Figura 77
DFIG série - Controles propostos ativos - Potência aparente dos RSC’s. . . .
94
Figura 78
DFIG série - Controles propostos ativos - Tensões dos links DC. . . . . . . .
94
LISTA DE TABELAS
Tabela 1
Dados utilizados para a modelagem do Gerador de indução duplamente alimentado - Capítulo 4 . . . . . . . . . . . . . . . . . . . . .
43
Tabela 2
Dados da rede de transmissão do tipo π . . . . . . . . . . . . . . . . .
44
Tabela 3
Dados utilizados para a modelagem do Gerador de indução duplamente alimentado - Capítulo 5 . . . . . . . . . . . . . . . . . . . . .
Tabela 4
66
Dados utilizados para a modelagem do Gerador de indução duplamente alimentado - Capítulo 6 . . . . . . . . . . . . . . . . . . . . .
77
LISTA DE ABREVIAÇÕES E SIGLAS
ANEEL
WWEA
EPE
IEA
NEMA
DFIG
RSC
GSC
SGSC
DC
AC
BEM
p.u.
SI
EWEA
IEC
NASA/DOE
PI
VUP
VUF
GI
SOGI-QSG
DSOGI-QSG
MSOGI-QSG
PCC
DVR
TI-SGSC
Agência Nacional de Energia Elétrica
World Wind Energy Association
Empresa de Pesquisa Energética
International Energy Agency
National Electrical Manufacturers Association
Doubly Fed Induction Generator
Rotor Side Converter
Grid Side Converter
Series Grid Side Converter
Direct Current
Alternating Current
Blade Element Momentum
Per-Unit System
International System of Units
European Wind Energy Association
International Electrotechnical Commission
U.S. National Aeronautics and Space Administration/U.S. Department of Energy
Proportional Integral
Voltage Unbalance Percentage
Voltage Unbalance Factor
Generalized Integrator
Second Order Generalized Integrator - Quadrature Signal Generator
Dual Second Order Generalized Integrator - Quadrature Signal Generator
Multiresonant Second Order Generalized Integrator - Quadrature Signal Generator
Point Of Common Coupling
Dynamic Voltage Restorer
Transformer Interfaced Series Grid Side Converter
SUMÁRIO
1
INTRODUÇÃO
1
1.1
JUSTIFICATIVA
4
1.2
ORGANIZAÇÃO DA TESE
6
2
CONTEXTUALIZAÇÃO DA PESQUISA
7
2.1
ASPECTOS POLÍTICO-ECONÔMICOS
7
2.2
ASPECTOS AMBIENTAIS
10
2.3
ASPECTOS TECNOLÓGICOS
11
3
TURBINAS DE VELOCIDADE VARIÁVEL
15
3.1
MODELO AERODINÂMICO DE TURBINAS EÓLICAS
17
3.2
MODELO DO ACOPLAMENTO MECÂNICO
20
3.3
GERADOR DE INDUÇÃO DUPLAMENTE ALIMENTADO
21
3.3.1
Conversores e suas funções
23
3.3.2
Modelo da máquina de indução
27
4
DESEQUILÍBRIO DE TENSÃO
31
4.1
COMPONENTES SIMÉTRICAS
33
4.1.1
Decomposição do modelo nos eixos d-q da máquina de indução
33
4.1.2
Decomposição das variáveis medidas
36
4.2
CONTROLES DO DFIG SOB TENSÕES DESEQUILIBRADAS
39
4.2.1
Obtenção das referências de controle dos conversores
40
4.2.1.1 RSC
40
4.2.1.2 GSC
41
4.2.2
42
Modelagem, simulação e apresentação dos resultados
4.2.2.1 Simulação e análise dos controles do RSC
44
4.2.2.2 Simulação e análise do controle coordenado para o RSC e GSC
49
4.3
CONSIDERAÇÕES
54
5
DFIG COM CONVERSOR SÉRIE ASSOCIADO
57
5.1
DFIG COM O SGSC ASSOCIADO SOB DESEQUILÍBRIOS DE TENSÃO
59
5.1.1
Controle de sequência negativa para o RSC
61
5.1.2
Controle de sequência positiva para o SGSC
62
5.1.3
Controle de sequência negativa para o SGSC
63
5.1.4
Controle de sequência negativa para o GSC
64
5.1.5
Modelagem, simulação e apresentação dos resultados
65
5.2
CONSIDERAÇÕES
72
6
CONFIGURAÇÃO SÉRIE DO DFIG
75
6.1
MÉTODO DE INJEÇÃO DE CORRENTE DE SEQUÊNCIA NEGATIVA
76
6.1.1
Modelagem, simulação e apresentação dos resultados
76
6.2
ABSORÇÃO DE POTÊNCIA PELO SGSC - MODO SUBSÍNCRONO
81
6.2.1
Modelagem, simulação e apresentação dos resultados
84
6.3
ATUAÇÃO CONJUNTA DOS CONTROLES PROPOSTOS
88
6.3.1
Modelagem, simulação e apresentação dos resultados
89
6.4
CONSIDERAÇÕES
94
7
CONCLUSÕES
97
7.1
TRABALHOS FUTUROS
99
REFERÊNCIAS
101
APÊNDICE A - TRABALHOS PUBLICADOS E SUBMETIDOS
107
1
1
INTRODUÇÃO
A energia eólica se consolidou nos últimos anos como um dos pilares na geração de energia
elétrica em diversos países, sendo reconhecida como uma fonte de energia confiável e acessível.
Após uma década de crescimento anual na faixa de 25% a energia eólica teve uma queda na taxa
de expansão nos últimos anos, sendo 2013 o ano com menor crescimento porcentual em duas
décadas com 12,8%, um declínio expressivo se comparado ao ano de 2012 que apresentou um
aumento de 19,2% no total instalado. Em 2014 o mercado de energia eólica voltou a se recuperar
com um crescimento de 16,4%, o que em Megawatt representa a maior potência instalada em
um ano com 52.654 MW, um crescimento de 48% se comparado à 2013 com 35.551 MW.
Atualmente a energia eólica corresponde a aproximadamente 4% do total da energia elétrica
gerada no mundo (WWEA, 2015).
A China continua sendo, de longe, o maior mercado para a energia eólica, com novos 23
GW instalados em 2014, muito à frente da Alemanha, que vem em segundo lugar, com 5,8 GW
instalados neste mesmo ano. Este rápido crescimento da China consolidou, nos últimos anos,
a Ásia como o continente com maior capacidade instalada com 39,3% do total mundial, um
pouco a frente da Europa com 35,5% (WWEA, 2015).
No contexto brasileiro, de acordo com o balanço energético nacional, também houve uma
recuperação do mercado de energia eólica em 2014. Neste ano, o crescimento observado na
produção de energia elétrica através da fonte eólica foi de 85,7%, o que representa uma produção adicional de 5.634 GWh, com um total produzido de 12.210 GWh. Se comparado ao
crescimento visualizado em 2013, de 30,2%, representando uma produção adicional de 1.526
GWh em relação à 2012, com um total de 6.578 GWh, nota-se facilmente a recuperação do
crescimento na produção de energia. Este avanço é justificado observando-se a potência instalada. O parque nacional teve sua capacidade expandida de 2.686 MW no final de 2013 para
4.888 MW no final de 2014, o que indica um crescimento de 122% no período. A eólica foi
responsável por a 2,06% da energia elétrica produzida no país em 2014 (EPE, 2015).
Apesar desta rápida expansão observada nas ultimas duas décadas, a inserção da energia eólica como fonte de energia elétrica não foi algo contínuo ao longo do século passado, e durante
o processo de eletrificação, em diversos países, muitas tentativas de inserir esta fonte junto às
redes de transmissão e distribuição de energia foram frustradas. Apenas à partir da década de 70
as pesquisas foram retomadas com sucesso, muito devido ao elevado valor que os combustíveis
fósseis atingiram (DIVONE, 2009) e a uma crescente preocupação com o aquecimento global
e com o impacto da consequente alteração do clima (IEA, 2015). Hoje, o nível de evolução
1 INTRODUÇÃO
2
tecnológica permite a esta fonte apresentar preços competitivos de mercado e a se consolidar
como uma importante fonte renovável de energia
Entretanto, para que o uso de novas fontes de energia renováveis, onde a eólica está incluída, continue a expandir rapidamente nos sistemas elétricos ao redor do mundo, é necessário
lidar com as alterações que a diversificação das fontes geradoras irá impor. Com o aumento da
complexidade das redes elétricas e redução da participação de grandes unidades geradoras síncronas, os serviços de controle dos parâmetros de qualidade da energia transmitida e distribuída
deverão também ser providos localmente por estas novas fontes renováveis (RESERVICES,
2014).
Focando-se em serviços ancilares1 ainda não disponíveis, mas que serão fundamentais para
que altos níveis de penetração de energia eólica nos sistemas elétricos possam ser atingidos,
podemos citar a operação dos geradores submetidos a desequilíbrios de tensão como um ponto
importante para a pesquisa e desenvolvimento.
Compensar desequilíbrios de tensão na rede elétrica não apenas é citado pelo REserviceS
(2014) como um serviço ancilar necessário a ser provido pela fonte eólica no futuro, mas também possui necessidade de aplicação imediata, já que o desequilíbrio de tensão é um importante
fator que contribui para a desconexão dos geradores eólicos da rede elétrica. O que influencia
não só a geração de energia mas também promove transitórios na rede devido à desconexão
repentina das turbinas.
Como apresentado por Kearney (2013), em seu estudo feito por meio do monitoramento de
parques eólicos, a presença de desequilíbrios de tensão na rede a qual os geradores eólicos estão
conectados, principalmente em redes rurais mais fracas, podem causar um baixo desempenho
na geração de energia. Muito disto se deve à frequente desconexão de um ou mais geradores
devido à atuação dos sistemas de proteção.
O gerador de indução duplamente alimentado (do inglês: Doubly Fed Induction Generator
- DFIG), foco desta tese por ser a configuração de gerador elétrico mais implementada em turbinas eólicas na atualidade (ASSOCIATION et al., 2012), sob desequilíbrio de tensão, apresenta
elevado valor de desequilíbrio de corrente em seu rotor e estator, devido à sua baixa impedância
associada às componentes de sequência negativa. Estas correntes são responsáveis por um aquecimento desigual nos enrolamentos da máquina e por oscilações no seu torque eletromagnético,
comprometendo assim a sua integridade.
Sob o ponto de vista da rede, a operação desequilibrada do gerador de indução pode ser um
1 De
acordo com a Audiência Pública No 010/2006 da ANEEL (Angência Nacional de Energia Elétrica) os
serviços ancilares são aqueles que complementam os serviços principais que, na segmentação brasileira, são caracterizados pela geração, transmissão, distribuição e comercialização. Estes serviços, em um sistema integrado como
o brasileiro, se caracterizam por relações causa-efeito que afetam os sistema como um todo e que ultrapassam as
fronteiras da área de abrangência das empresas e/ou dos serviços principais.
1 INTRODUÇÃO
3
agente intensificador do desequilíbrio de tensão, o que também pode ser ilustrado pela sua baixa
impedância de sequência negativa. Ainda, segundo NEMA (2009) é recomendado a aplicação
de um coeficiente de degradação da máquina de indução quando operando sob desequilíbrios
de tensão de até 5%. Acima deste limite sua operação não é recomendada.
Configurações de turbina de velocidade variável com conversores de frequência associados
permitem que se utilize estratégias para a operação e compensação durante desequilíbrios de
tensão. Isso se aplica ao DFIG, que possui um conversor back-to-back conectando o rotor da
máquina à rede, permitindo assim a implementação de diversos controles adicionais. Desta
forma, variadas estratégias foram propostas para o DFIG com este fim.
Utilizando-se o conversor do lado do rotor (do inglês: Rotor Side Converter - RSC) do
DFIG, algumas estratégias foram propostas para a operação sob desequilíbrios de tensão (BREKKEN; MOHAN, 2007; RUBIRA; MCCULLOCH, 2000; WANG; XU, 2007; XU; HU; HE,
2012). Estes controles podem seguir os seguintes objetivos:
(a) Reduzir as oscilações de potência ativa na saída do gerador;
(b) Reduzir o desequilíbrio da corrente do rotor da máquina;
(c) Reduzir o desequilíbrio da corrente do estator da máquina;
(d) Reduzir as oscilações no torque eletromagnético do gerador de indução.
Vale ressaltar que apenas um dos parâmetros pode ser controlado por vez e em diversos
casos o controle de algum destes parâmetros contribui negativamente para os outros.
Da mesma forma, o conversor do lado da rede (do inglês: Grid Side Converter - GSC)
pode ser utilizado para a compensação do desequilíbrio de corrente do estator do DFIG (QIAO;
HARLEY, 2008). Por estar conectado em paralelo com a rede elétrica este conversor é capaz
de prover em sua corrente uma componente de desequilíbrio que se anule com a do estator.
As estratégias utilizando o RSC e o GSC podem ser combinadas de diferentes formas, de
modo a se obter um melhor resultado (HU; XU; HE, 2013). Sendo que, a melhor solução combinada tem se mostrado utilizar o RSC para controlar as oscilações no toque eletromagnético da
máquina de indução e o GSC para compensar as correntes desequilibradas que fluem do estator
da máquina, como apresentado por Qiao e Harley (2008), Fan, Yin e Kavasseri (2009).
Uma estratégia para a compensação do desequilíbrio de tensão utilizando-se o DFIG é
apresentada em Wang, Xu e Williams (2009). Na qual, o RSC reduz as oscilações no torque
eletromagnético da máquina e o GSC injeta correntes desequilibradas que promovem a compensação do desequilíbrio de tensão no ponto estipulado da rede (WANG; XU; WILLIAMS,
2009).
1 INTRODUÇÃO
4
Outro método para lidar com distúrbios de tensão na rede, como desequilíbrios e faltas
assimétricas, consiste em acoplar um terceiro conversor junto ao barramento DC do DFIG e
em série com a rede. Esta configuração apresenta performance bastante superior à configuração
tradicional do DFIG quando sujeita a distúrbios de tensão, garantindo assim sua conexão mesmo
sob condições bastante adversas (SINGH; EMMOJI; SINGH, 2008).
Com o terceiro conversor conectado em série é possível controlar a tensão do estator,
isolando-se assim a tensão nos terminais da máquina da tensão da rede (FLANNERY; VENKATARAMANAN, 2007, 2008; LIAO et al., 2011). Este terceiro conversor é chamado de
conversor série do lado da rede (do inglês - Series Grid Side Converter - SGSC).
Controles coordenados para o DFIG com conversor série associado também já foram propostos, onde os objetivos são reduzir os impactos do desequilíbrio de tensão sobre o gerador e
minimizar a contribuição do DFIG para o desequilíbrio de corrente da rede (YAO et al., 2013).
Outra possibilidade para a implementação do conversor série é transferir o controle da tensão do barramento DC para o SGSC e, desta forma, eliminar o GSC, retornando o DFIG a uma
configuração baseada em dois conversores. Esta configuração com o conversor do lado da rede
em série substituindo totalmente o GSC, foi proposta por Kelber e Schumacher (2001). Posteriormente análises mais aprofundadas foram feitas por Massing e Pinheiro (2008) e por Jayanti
et al. (2008). No entanto, assim como na configuração com três conversores, não é encontrada
na literatura a utilização desta configuração para compensação de desequilíbrios de tensão em
um ponto da rede.
Adicionalmente, na configuração série do DFIG, onde o GSC é substituído pelo SGSC, os
métodos propostos para o controle do fluxo de potência do rotor implicam na alteração módulo
da tensão do estator da máquina. Neste controle, quando a tensão induzida no SGSC se soma à
tensão da rede, elevando a tensão do estator, este conversor absorve potência ativa e, quando a
tensão induzida no SGSC se subtrai à tensão da rede, reduzindo a tensão do estator, o conversor
injeta potência ativa. A limitação deste método ocorre quando a máquina opera no regime
subsíncrono e a absorção de potência é necessária. Neste caso, a elevação da tensão terminal do
estator pode ser uma limitação para a operação da máquina, que pode ter seu fluxo concatenado
saturado (FLANNERY; VENKATARAMANAN, 2008). Esta limitação ainda não foi tratada na
literatura.
1.1
JUSTIFICATIVA
Com a necessidade crescente de serviços ancilares prestados à rede elétrica, a capacidade
dos geradores eólicos de não só operarem em uma rede com desequilíbrios de tensão, mas
também compensarem os desequilíbrios em um ponto específico da rede, pode ser determinante
para viabilizar a instalação de geradores eólicos em redes mais susceptíveis a desequilíbrios de
1.1 JUSTIFICATIVA
5
tensão.
Neste contexto, percebe-se que as configurações do DFIG que incorporam o conversor série
apresentam grande potencial para a operação sob desequilíbrios de tensão, uma vez que o conversor série é capaz de isolar a tensão do estator da tensão da rede elétrica. Porém, percebe-se
que a literatura da área ainda não dispõe de trabalhos focados no uso de DFIG com conversor
série para compensação de desequilíbrios de tensão no ponto de conexão com a rede. E, adicionalmente, a operação do DFIG com configuração série ainda apresenta uma lacuna relacionada
a sua operação no regime subsíncrono.
Desta forma, esta tese se baseia nas hipóteses de que:
(a) é possível compensar o desequilíbrio de tensão no ponto de conexão com a rede utilizando
as configurações do DFIG que incorporam o conversor série, sem efeitos prejudiciais à
operação do gerador de indução;
(b) é possível operar o DFIG em sua configuração série na região subsíncrona sem o aumento
da magnitude da tensão estatórica do gerador de indução, eliminando assim sua evidente
limitação operacional.
Logo, de acordo com estas afirmações feitas, o objetivo desta tese é desenvolver metodologias para a utilização das configurações do DFIG com conversor série para a compensação do
desequilíbrio de tensão na rede elétrica. Aproveitando, desta forma, a maior capacidade destas
configurações de lidar com distúrbios de tensão se comparadas à configuração tradicional.
Para que o objetivo estipulado possa ser atingido, deve-se subdividir a pesquisa em duas
frentes:
(a) substituir o controle já proposto na literatura de absorção de potência pelo SGSC por outro
que não implique em alterações no módulo da tensão do estator da máquina, eliminando
assim a deficiência operacional do DFIG série no modo subsíncrono.
(b) propor métodos de injeção de corrente desequilibradas para as configurações do DFIG
com conversor série, permitindo assim a compensação de desequilíbrios de tensão na
rede elétrica.
A metodologia utilizada para a validação dos métodos propostos consiste na modelagem
computacional em ambiente Matlab/Simulink. Onde, após a inserção dos modelos, simulações
são conduzidas para a geração dos resultados discutidos nos capítulos seguintes.
1 INTRODUÇÃO
6
1.2
ORGANIZAÇÃO DA TESE
Esta tese está estruturada em seis capítulos, conclusão e apêndices. O presente capítulo
apresenta uma breve introdução do problema abordado, a hipótese e o objetivo do trabalho.
No capítulo dois é apresentado um panorama geral da energia eólica como fonte de energia
elétrica no século XX e projeções para o século XXI. Projeções estas baseadas na necessidade
de evolução tecnológica, mais especificamente na necessidade de operação de turbinas eólicas
em um novo contexto de sistema elétrico, com reduzida penetração de fontes síncronas e alta
penetração das novas fontes renováveis.
O terceiro capítulo traz um detalhamento da configuração de turbina de velocidade variável
mais utilizada atualmente, o DFIG. Este capítulo aborda o modelo utilizado da máquina de
indução, os conversores e seus controles.
O desequilíbrio de tensão é abordado no capítulo quatro, onde são apresentadas suas características, a sua influência sobre o DFIG e a modelagem do fenômeno pela decomposição em
componentes simétricas. Além disso, este capítulo traz os controles já propostos para a configuração tradicional do DFIG, tanto para a operação adequada da máquina de indução, quanto para
a compensação do desequilíbrio pelo método de injeção de correntes de sequência negativa.
A associação do conversor série ao DFIG é tratada no capítulo cinco. O modelo e controle deste novo conversor operando sob desequilíbrio de tensão são detalhados e é proposta
uma estratégia coordenada para a compensação do desequilíbrio de tensão utilizando-se os três
conversores, o que aumenta sua faixa operacional. A modelagem é feita em ambiente SimulinkMatlab para a verificação de seus efeitos.
O capítulo seis aborda o DFIG série, onde um novo modo de controle de absorção de
potência pelo SGSC é proposto. Além disso, é proposto também um método de compensação
de desequilíbrio de tensão na rede elétrica, onde a injeção de corrente de sequência negativa
pode ser feita pelo estator da máquina sem prejudicar a sua operação.
7
2
CONTEXTUALIZAÇÃO DA PESQUISA
A ratificação da energia eólica como recurso energético importante na ampliação da matriz
elétrica mundial, dada pelo crescimento acelerado de sua participação em diversos países, teve
várias vertentes importantes. A retomada nas pesquisas, no início da década de 70, se deu pela
preocupação com a diversificação das fontes energéticas após a crise do petróleo, onde surgiram
planos de incentivo ao redor do mundo, como o programa federal de energia eólica nos Estados
Unidos da América (do inglês: U.S. Federal Wind Energy Program), que teve início em 1973.
Até a década de 70, o custo da energia proveniente de combustíveis fósseis, e também de
plantas nucleares, era muito reduzido. Desta forma, na virada da década de 60 para a década
de 70 havia pouca ou nenhuma atividade de produção de energia elétrica utilizando-se a fonte
eólica ao redor do mundo (DIVONE, 2009).
Outro fator que tem se tornado um estímulo à expansão da energia eólica é o crescimento
da preocupação com os impactos ambientais da geração de energia, principalmente relacionada
à questão do aquecimento global pela emissão de gases de efeito estufa, em especial com a
emissão de dióxido de carbono (CO2 ). O setor de energia é responsável por aproximadamente
dois terços das emissões de gases de efeito estufa. Desta forma, ações efetivas devem ser
implementadas para que se possa contornar o problema da alteração climática (IEA, 2015).
Motivados pela preocupação ambiental e necessidade de diversificação das matrizes elétricas, planos de incentivo governamentais dão impulso à pesquisa e à implantação de geradores
eólicos ao redor do mundo. Estes planos de incentivo ainda são fundamentais, visto que o
custo da energia eólica, apesar de ter experienciado uma dramática redução, ainda é levemente
superior se comparado ao custo das fontes tradicionais em boa parte do mundo.
A evolução tecnológica permitiu que a escala de geração atingisse a ordem de MW possibilitando que o percentual da penetração de energia eólica em alguns sistemas elétricos se tornasse
significante frente às fontes tradicionais. A evolução de materiais e processos construtivos dos
aerogeradores também reduziram em muito seu custo de implementação. Nas seguintes subseções tem-se um detalhamento de cada uma das faces da evolução desta forma de energia e a
apresentação de projeções que norteiam a expansão desta fonte.
2.1
ASPECTOS POLÍTICO-ECONÔMICOS
Com início na década de 70, devido à necessidade do desenvolvimento de novas fontes
energéticas percebida durante a crise do petróleo de 1973-1974, políticas de incentivo para a
8
2 CONTEXTUALIZAÇÃO DA PESQUISA
energia eólica foram criadas e possibilitaram alavancar a sua maturação tecnológica e viabilizar sua implementação. Diversos planos foram elaborados para incentivar tanto a pesquisa
tecnológica como a implantação de parques eólicos ao redor do mundo. Os Estados Unidos
da América, Dinamarca, Alemanha e Holanda podem ser citados como os primeiros países a
implantar extensos planos de incentivo à pesquisa, implantação e comercialização de turbinas
eólicas (DIVONE, 2009).
A principal linha de incentivo para a instalação de fontes renováveis ao redor do mundo
é a utilização de políticas de Feed-In, que tanto podem garantir o preço mínimo da energia
elétrica gerada, como estabelecer o valor do prêmio a ser pago acima do preço da energia
elétrica de mercado. Normalmente, são definidas regulamentações para impor uma obrigação
contratual entre as concessionárias de energia e o produtor de energia elétrica com base em
fontes renováveis (DUTRA; SZKLO; TOLMASQUIM, 2006).
A maturidade tecnológica alcançada resultou em uma redução considerável no preço das
instalações e no custo da energia nos últimos anos, viabilizando a implementação de novos parques não mais apenas através de planos de incentivo que buscam financiar fontes de energia
renováveis, mas também pela competitividade de mercado. Segundo a Empresa de Pesquisa
Energética (EPE, 2013), o custo médio da energia obtida no leilão A3/2013, realizado em novembro de 2013, foi de R$/124,4 MWh, uma redução expressiva se comparado ao preço de
R$/300,00 MWh dos primeiros parques eólicos contratados no Brasil. Outro ponto bastante
favorável é a garantia física de fornecimento de energia que neste leilão atingiu 43,8% da capacidade instalada, valor expressivo em relação a média mundial que gira em torno de 35%.
Apesar disso, a crise econômica mundial nos últimos anos e a drástica redução no preço do
petróleo fazem com que haja uma tendência de redução nos investimentos em fontes renováveis,
o que atinge diretamente a fonte eólica. Apesar desta redução nos investimentos ainda não
ter se mostrado efetivamente, a associação europeia de energia eólica (do inglês: European
Wind Energy Association - EWEA) em sua ultima projeção do mercado de energia da União
Europeia, para o ano de 2020, reduziu sua previsão tanto da participação da energia eólica,
quanto do consumo total de energia elétrica, se comparada a previsão anterior, feita em 2009.
O consumo de energia na União Europeia deve ser 11% menor e a projeção da capacidade de
energia eólica instalada foi reduzida de 230 GW para 192 GW, o que ainda deverá representar
14,9% da energia demandada (EWEA, 2014).
Focando nas metas definidas pela União Europeia para 2020, o REserviceS (RESERVICES, 2014) foi o primeiro estudo feito para investigar serviços de suporte à rede promovidos
por fontes de energia solar e eólica, fornecendo diretrizes técnicas e econômicas para o estabelecimento de um mercado de serviços ancilares de energia e bases para a elaboração de futuros
requisitos de operação de redes.
Segundo este estudo, grandes níveis de penetração de energia eólica e solar deverão ser
2.1 ASPECTOS POLÍTICO-ECONÔMICOS
9
inseridos nas redes de transmissão e distribuição nesta década. O que irá demandar mudanças
fundamentais na forma em que os operadores de linhas de transmissão e distribuição gerenciam seus serviços de suporte à rede por parte dos geradores conectados, visando controles de
frequência, tensão e recuperação da rede após faltas. A redução da participação das formas de
geração tradicionais e a inserção de um grande número de geradores descentralizados, de fontes
renováveis, demandará que os serviços de suporte à rede sejam providos em diversos pontos
desta rede por estas novas unidades de energia.
Para que o controle desta rede descentralizada seja possível, um novo mercado interno
de energia integrado deve ser criado. Políticas e normas devem ser definidas a respeito da
função de cada tipo de geração, da unidade concentrada de energia até o pequeno fornecedor
residencial. Os serviços de suporte à rede também deverão ser inseridos na remuneração das
unidades geradoras, compensando assim o custo de se associar controles de compensação de
frequência e tensão, e de recuperação de rede aos geradores distribuídos. Planos de incentivo
à pesquisa e desenvolvimento também devem ser estabelecidos, visando fomentar as novas
formas de gerenciamento da rede, as necessárias redes de comunicação entre fontes geradoras,
unidades de carga e centros de controle, e desenvolver a capacidade das unidades eólica e solar
de prover diferentes serviços ancilares à rede.
Já o Wind Vision Report (ENERGY, 2015), faz uma projeção da evolução da energia eólica nos Estados Unidos. Esta projeção prevê a participação da enegia eólica na matriz elétrica
americana em 10% em 2020, 20% em 2030 e 35% em 2050. Para que este cenário seja possível
é previsto um aumento de 1% no custo da energia em 2030. Como compensação, a redução
no custo da energia, devido ao investimento em energia eólica, será visto posteriormente, com
uma redução de 2% no custo da energia elétrica em 2050. Neste estudo, diversos outros benefícios também são abordados financeiramente, como a redução no uso da água para geração
de energia, a redução no custo ambiental devido à redução na emissão dos gases de efeito estufa, impacto monetário da redução de outros poluentes provindos de fontes de energia térmica,
redução no preço do gás natural no mercado devido à queda na demanda.
A previsão americana também cita a importância da evolução tecnológica desta fonte de
energia, mas se foca mais na evolução de escala dos geradores e na consequente redução de
custo da energia gerada. Além disso, se mostra otimista quanto à possibilidade de alto nível
de penetração de energia eólica em alguns estados. Ele cita a produção de energia eólica nos
estados de Iowa e Dakota do Sul que ultrapassou 20% da energia demandada no estado em 2013
e afirma que, no estado do Colorado, operadores de sistema lidaram com níveis de produção de
energia eólica instantâneos de cerca de 60% sem maiores problemas.
Ambas as previsões, tanto a americana quanto a europeia, nos mostram que a penetração
de fontes renováveis nos sistemas elétricos deve ser elevada nos próximos anos, mudando as
características operacionais das redes, que tendem a aumentar seu grau de complexidade. As
2 CONTEXTUALIZAÇÃO DA PESQUISA
10
mudanças também deverão ser sentidas no modo de comercialização da energia, onde novas
regras deverão estabelecer o valor da remuneração por tipo de fonte energética e pelos serviços
ancilares prestados a rede. Tudo isso, nos mostra que a evolução não poderá apenas tomar o
aspecto tecnológico, mas também deverá alterar as políticas de operação dos sistemas elétricos
e as regras dos mercados de energia. O que torna necessário novos estudos para estabelecer
estas futuras diretrizes.
2.2
ASPECTOS AMBIENTAIS
É possível afirmar que as atividades humanas, principalmente após a revolução industrial,
que tem início em 1760, tem influenciado a composição da atmosfera em relação aos gases
que conhecidamente promovem seu aquecimento. Dentre eles, pode-se citar primeiramente o
dióxido de carbono (CO2 ), seguido pelo metano (CH4 ) e óxido nitroso (N2 O) como principais
agentes modificadores do clima. Logo, pode-se afirmar também, com diferentes graus de certeza, que a alteração desses gases na atmosfera, promovida pela ação humana, tem influência em
diversos aspectos climáticos. A elevação da temperatura da atmosfera, a redução dos glaciares,
o aumento no nível dos oceanos, o aumento em sua temperatura e da quantidade de oxigênio
dissolvido são alguns dos parâmetros que podem ser relacionados com maior ou menor grau de
confiança à atividade humana (STOCKER et al., 2014).
Ainda, segundo Allen et al. (2014), pode se dizer, com elevado grau de confiança, que as
emissões de gases provindas da queima de combustíveis fósseis e aquelas provindas do uso da
terra são as causas dominantes do aumento da concentração de CO2 , CH4 e N2 O na atmosfera.
A concentração de CO2 na atmosfera teve um aumento de cerca de 40% entre 1750, imediatamente antes do início da revolução industrial, e 2011. Neste mesmo período a concentração de
CH4 cresceu em 150% e a de N2 O em 20%. A influência humana na emissão do CH4 e do N2 O
está muito relacionada com o uso da terra, sendo o CH4 associado com a agricultura e pecuária
e o N2 O a produção e uso de fertilizantes. A maior influência humana na emissão de CO2 é, de
longe, o uso de combustíveis fósseis como fonte energética.
As emissões de gases de efeito estufa para a obtenção de energia representam dois terços
das emissões feitas pelo homem. Portanto, ações efetivas neste setor são fundamentais para
lidar com o problema da mudança climática. O investimento em fontes renováveis de energia
e/ou não emissoras de gases de efeito estufa é fundamental para que os limites previstos para o
aquecimento global neste século não sejam extrapolados.
Apesar da queda no preço do petróleo, que saiu do patamar de US$100,00 o barril no
meio do ano de 2014 para o patamar de US$50,00 dólares o barril no começo de 2015, os
investimentos em fontes de energia renováveis não perderam sua força. No setor de energia
elétrica, é estimado que as renováveis tenham crescido 128GW em 2014, cerca de 45% da
2.3 ASPECTOS TECNOLÓGICOS
11
expansão energética deste ano. Destes 128GW, a maior parte se deve à adição de energia eólica
(37%), seguido pela energia solar (33%) e energia hídrica (25%). A queda no preço do petróleo
promove um novo desafio para os biocombustíveis, porém, o Brasil é citado como referência de
estímulo a esta fonte renovável, aumentando a mistura de etanol da gasolina de 25% para 27%,
de biodiesel no diesel de 5% para 7%, e ainda aumentando a carga de impostos sobre a gasolina.
Outra fonte não emissora de gás de efeito estufa é a nuclear, que tem sua expansão liderada pela
China, que possuía cerca de 28GW em implantação no final de 2014, o que representava 60%
dos 46 GW sendo instalados em todo o mundo (IEA, 2015).
A liderança da energia eólica nas novas instalações de energias renováveis mostra sua importância na remodelagem e expansão da matriz elétrica mundial. Com sua penetração ainda
bastante reduzida em boa parte do mundo e com amplo potencial residual a ser explorado, sua
expansão pode ser uma contribuição chave para que as metas nas reduções de emissão de gases
de efeito estufa sejam alcançadas.
2.3
ASPECTOS TECNOLÓGICOS
O uso do vento como fonte de energia teve início há pelo menos três mil anos atrás. Inicialmente usado como fonte energética em moendas de grãos, unidades de bombeamento de água e
propulsão de embarcações, o vento passou a ser visto como fonte de energia elétrica no final do
século 19. Os primeiros passos nesta direção foram dados entre 1888 e 1900, com a construção
de um gerador eólico de 12kW DC feita por Brush nos EUA e com as primeiras pesquisas na
área utilizando-se um túnel de vento, feitas por LaCour na Dinamarca.
Logo após 1945, pesquisas com aerogeradores foram iniciadas na Dinamarca, França, Alemanha e Inglaterra, provavelmente estimuladas pela turbina Smith-Putnam de 1,25MW que
operou cerca de 1000 horas nos EUA durante a Segunda Guerra Mundial. Apesar de algum
grau de sucesso tecnológico, nenhuma dessas pesquisas se sustentou por muito tempo, porém,
o conhecimento obtido foi uma base sólida para o ressurgimento da energia eólica no início da
década de 70, que foi incentivado pela crise do petróleo de 1973-1974 (SHEPHERD, 1990).
Na década de 70 tem-se a retomada das pesquisas em diversos países, como exemplo podese citar o programa de desenvolvimento de turbinas eólicas NASA/DOE nos EUA que perdurou
por cerca de 20 anos e resultou no projeto, construção e teste de 12 turbinas com porte médio e
grande (DIVONE, 2009). As pesquisas tiveram diversas frentes como: configurações de rotores, configurações de geradores elétricos, integração à rede, controle, aerodinâmica, materiais,
processos construtivos, etc. As diversas frentes de pesquisa resultaram em uma rápida evolução
das turbinas eólicas nas últimas três décadas, o que possibilitou chegar a produtos com competitividade comercial devido à redução do custo capital, ao notório aumento de eficiência e do
fator de capacidade, e à melhora na confiabilidade.
12
2 CONTEXTUALIZAÇÃO DA PESQUISA
Outro ponto fundamental foi a criação de padrões internacionais para turbinas eólicas nos
últimos 20 anos pela Comissão Eletrotécnica Internacional (do inglês: International Electrotechnical Commission - IEC), que é a organização responsável pela preparação e publicação destes padrões que englobam procedimentos de certificação, especificações de projeto, características de integridade, técnicas de levantamento de dados e procedimentos de teste (THRESHER
et al., 2009).
Turbinas com flexibilidade de operação, para a produção de energia eficiente em variadas
velocidades de vento, foram peças chave para o aumento da capacidade de produção de energia.
Após a retomada das pesquisas na década de 70 diversas implementações junto ao gerador elétrico foram testadas para atingir este objetivo. Neste contexto se destacaram as configurações
de turbinas que utilizavam geradores de indução associados a técnicas para o controle de escorregamento, para que se pudesse variar o torque e consequentemente se pudesse atingir o ponto
ótimo de extração de energia pelo rotor. O primeiro método utilizado foi a associação de resistências ao circuito do rotor do gerador de indução, porém, a dissipação de energia em forma
de calor, através das resistências associadas, reduzia o ganho de energia obtido pela operação
ótima do rotor da turbina, tornando o sistema ineficiente. Este método fora testado já na década
de 30 na turbina russa Balaclava, que utilizava um reostato para variar a resistência do rotor
do gerador elétrico e consequentemente controlar o seu escorregamento (CARLIN; LAXSON;
MULJADI, 2003).
Utilizando-se deste mesmo conceito, de se controlar o escorregamento da máquina para
variar o seu torque eletromagnético, e com a evolução da eletrônica de potência, no início da
década de 80 surgiram os predecessores do que iria se tornar a configuração de gerador elétrico
mais utilizada em turbinas eólicas atualmente, o gerador de indução duplamente alimentado (do
inglês: Doubly Fed Induction Generator - DFIG) (ASSOCIATION et al., 2012).
A turbina NASA MOD-0 Plum Brook, instalada na cidade de Ohio em 1975, possuiu diversas configurações de teste durante o seu ciclo de vida. Inicialmente possuía um gerador
síncrono de 100kW. Em 1985 foi apresentada sua versão final de testes, onde o gerador original
foi substituído por um gerador de indução bobinado de 200kVA com seu rotor acoplado a um
ciclo-conversor, o que permitia à turbina operar acima ou abaixo da velocidade síncrona. Teoricamente, era esperado que a máquina pudesse operar entre 450 e 3150 rpm, porém, a faixa
real de operação, devido à limitações da máquina, se mostrou bem menor, permitindo à máquina operar entre 1440 e 2160 rpm. Outro ponto relevante era que o ciclo-conversor podia ser
comutado para um banco de resistores, o que permitiu testes comparativos da mesma turbina
operando com velocidade fixa e velocidade variável.
Em julho de 1987, foi instalada no Havaí a turbina NASA MOD-5B. Utilizando-se da experiência obtida com a turbina MOD-0, esta turbina elevou a escala de potência da turbina anterior.
Com um gerador de indução bobinado de 3,5 MVA, faixa de operação entre 1330 e 1780 rpm,
2.3 ASPECTOS TECNOLÓGICOS
13
e um ciclo-conversor capaz de prover recuperação de energia do rotor da máquina para a rede
elétrica, esta turbina operou até o final de 1996.
Na Alemanha, outra predecessora das turbinas com gerador de indução duplamente alimentado foi testada, em 1982 a turbina Growian de 3MW foi instalada. Os testes iniciaram no verão
de 1983 e sua operação se estendeu até a primavera de 1987 (CARLIN; LAXSON; MULJADI,
2003).
A evolução da eletrônica de potência levou o DFIG a uma participação importante no mercado de energia eólica. A possibilidade de se utilizar conversores com apenas uma fração da
potência do gerador elétrico, e mesmo assim possibilitar uma faixa de operação ótima de aproximadamente ± 30% da velocidade síncrona, resultou em uma configuração vantajosa se comparada às turbinas de velocidade fixa, com menor fator de capacidade de produção de energia,
ou às configurações equipadas com conversor de potência nominal, que apresentam um valor
elevado de instalação (ASSOCIATION et al., 2012).
A expansão da participação da energia eólica nas matrizes elétricas nas últimas duas décadas trouxe novos desafios, já que, com maiores níveis de penetração desta fonte de energia,
seus efeitos sobre o sistema elétrico não podem mais ser descartados. Com isso, controles de
suporte à tensão e à frequência da rede, e de suporte à rede durante faltas foram associados aos
geradores.
Outro ponto importante é que com a redução da participação de geradores síncronos de
grande porte no sistema elétrico, a inércia destes sistemas é reduzida, o que também reduz sua
capacidade de resposta a variações de frequência. Logo, para altos níveis de penetração de
energia eólica, se torna necessário a adição da função de regulador, onde a turbina usa seu controle sobre a aerodinâmica do rotor para prover uma reserva de potência que pode ser utilizada
quando exista a necessidade de correção de frequência.
A função de resposta inercial também se aplica nestes casos, onde o torque extraído do
gerador elétrico é rapidamente aumentado para que o nível de frequência durante o evento não
atinja valores muito reduzidos. Esta função tem resposta muito mais rápida se comparada à
função de regulador, porém, promove a redução da velocidade da turbina, o que limita o seu
tempo de atuação e requer que a energia utilizada durante a compensação seja recuperada após
o desligamento do controle para que a turbina retome sua operação normal (MILLER et al.,
2014).
Estes controles já estão disponíveis para modelos de turbina de alguns fabricantes, como
a General Electric (GE), que disponibiliza o sistema WindINERTIATM para algumas de suas
plataformas (MILLER; CLARK; WALLING, 2009).
Segundo o REserviceS (RESERVICES, 2014), os serviços de suporte à rede que podem ser
associados às novas fontes de energia renovável, onde está incluída a energia eólica, e que são
14
2 CONTEXTUALIZAÇÃO DA PESQUISA
necessários para a operação de sistemas elétricos com altos níveis de penetração destas fontes,
podem ser categorizados da seguinte maneira:
1. Suporte de frequência - Serviços associados à regulação de potência em curto prazo e
à frequência do sistema elétrico. Inclui regulação de frequência automática e manual, e
reservas operacionais de potência.
2. Suporte de tensão - Serviços requeridos para a manutenção da tensão, durante operação
normal e sob distúrbios no sistema elétrico, feitos pela compensação de potência reativa.
Inclui a injeção e absorção de potência reativa.
3. Restauração do Sistema - Serviços requeridos para a recuperação do sistema elétrico após
uma falta. Do ponto de vista do gerador pode-se citar a permanência do gerador conectado
ao sistema dando suporte a este durante o evento, e a operação do gerador e suporte à rede
em condições de ilhamento.
4. Outros serviços ainda não disponíveis no momento:
• Mitigação de tensões de sequência negativa - Em redes mais susceptíveis à este
fenômeno ou durante faltas assimétricas. O nível de compensação deve ser estimado
para cada sistema, assim como, o nível de injeção de correntes de sequência negativa
na rede, que deve ser provido localmente.
• Amortecimento de harmônicas de ordem mais baixa - Pode ser suprido por fontes
de energia baseadas em inversores de potência ou por filtros ativos associados.
• Amortecimento de oscilações de potência - A ser provido em redes onde a reserva
girante é bastante baixa.
Os serviços previamente citados podem ser usados como diretrizes para pesquisa e evolução
dos geradores que fazem parte destas novas fontes de energia renovável, especialmente a eólica
que vem sendo amplamente expandida por todo o mundo. Estes serviços serão fundamentais
para que elevados níveis de fontes renováveis possam ser associados aos sistemas elétricos, que
poderão se tornar cada vez mais diversificados.
15
3
TURBINAS DE VELOCIDADE VARIÁVEL
No início do desenvolvimento das turbinas eólicas, estas tinham o objetivo de fornecer
energia mecânica para atividades humanas, principalmente para a moagem de grãos. Devido a
esta atividade, as turbinas eólicas ficaram primeiramente conhecidas como moinhos de vento.
O termo turbina eólica só veio a ser estabelecido posteriormente, e foi associado a máquinas
que poderiam utilizar a energia dos ventos para fornecer energia mecânica para diversos fins,
como a geração de energia elétrica, sendo que, neste período, a utilização desta tecnologia para
a moagem de grãos já tinha sido extinta (SHEPHERD, 1990).
No início do século 19, com sua difusão impulsionada pelo crescimento da agricultura
no centro-oeste americano, turbinas eólicas com a finalidade de bombeamento de água foram
largamente utilizadas.
Ainda, no século 19, os princípios básicos da aerodinâmica e do funcionamento das turbinas
eólicas começaram a ser desvendados. Até então, a eficiência da extração de energia não era
uma preocupação, assim como a variação da velocidade e do torque no eixo de saída. Desta
forma, as turbinas operavam livremente sob os efeitos das diferentes condições do vento e, com
isso, podem ser classificadas como turbinas de velocidade variável.
No início do século 20, tem início a era da eletricidade e, com isso, a energia eólica se tornou
uma opção para a geração de eletricidade em regiões distantes, onde o abastecimento por linhas
de distribuição era uma realidade pouco palpável. Com o intuito de fornecer eletricidade para o
armazenamento em bancos de baterias, as turbinas eólicas utilizavam máquinas DC e, com isso,
podiam operar livremente em variadas velocidades. Entre os anos 20 e os anos 50, Marcelleus e
Joseph Jacobs produziram milhares de turbinas eólicas DC que foram instaladas em áreas rurais
remotas do centro-oeste americano (CARLIN; LAXSON; MULJADI, 2003).
No final da década de 30, com a chegada das redes de transmissão e distribuição de energia
elétrica, a aplicação de turbinas eólicas equipadas com máquinas DC teve um rápido declínio. O
futuro apontava para o abastecimento através de grandes unidades geradoras de energia, longas
linhas de transmissão, que dependiam de altos níveis de tensão, e abastecimento padronizado
com valores constantes de tensão e frequência. Desta forma, a conexão das turbinas DC a estas
redes se tornou inviável e os equipamentos foram rapidamente descartados.
O início da eletrificação rural nos EUA, e o declínio das turbinas eólicas DC, veio com
o Ato de Eletrificação Rural em 1937, como parte do programa do presidente Roosevelt para
livrar o país da grande depressão. Já na Europa, devido à escassez de combustíveis fósseis, o
16
3 TURBINAS DE VELOCIDADE VARIÁVEL
uso destas turbinas ainda prosperou durante a segunda guerra mundial. Com o final da guerra
esta tecnologia também foi gradativamente abandonada (SHEPHERD, 1990).
Após esse período, diversas tentativas de conexão de turbinas eólicas com as redes AC
foram feitas, como a já citada turbina Smith-Putnam que utilizava um gerador síncrono para
fixar velocidade do rotor de acordo com a frequência da rede. No entanto, fixar a velocidade do
rotor resultou em esforços severos não esperados no rotor turbina, o que gerou danos por fadiga
mecânica, já que a base das pás se mostrou subdimensionada para este tipo de operação.
A operação em velocidade fixa propiciava uma menor eficiência da captação de energia
do vento. Diversas turbinas de velocidade fixa comprovaram a necessidade de se recuperar a
possibilidade de operar a turbina em diversas velocidades do rotor, uma característica natural
das primeiras turbinas que foi impossibilitada pelas primeiras tecnologias de acoplamento à
rede elétrica.
No início dos anos 50 tem-se o início de uma nova era dos componentes eletrônicos com
o desenvolvimento dos transistores de junção p-n (SHOCKLEY, 1949). O que iniciou uma
revolução nas telecomunicações e posteriormente, com a aumento da escala de potência e da
eficiência destes componentes nos anos 60, proporcionou também uma nova fase no acionamento de máquinas elétricas. Porém, já em 1952, o potencial para a utilização dos transistores
de junção p-n para conversores de frequência e acionamentos de máquinas já era citado (ALEXANDERSON, 1952).
Apenas na década de 70, o sonho de turbinas eólicas de velocidade variável conectadas às
redes de energia elétrica começou a se tornar realidade. Utilizando-se da evolução em escala
de potência dos componentes eletrônicos de estado sólido, novas topologias de conversores
AC-DC, DC-AC e AC-AC puderam ser desenvolvidas, proporcionando um grande avanço no
acionamento de máquinas elétricas.
A partir destes novos conversores de potência, configurações de turbinas eólicas com conversores totais e parciais foram desenvolvidas. O objetivo principal era a operação em velocidade variável e frequência constante, possibilitando assim a integração adequada à rede elétrica
e uma melhor eficiência na extração de energia pelo rotor da turbina. Um objetivo secundário
era a redução dos esforços mecânicos durante rajadas de vento, causa de falhas estruturais em
diversos sistemas de velocidade-fixa testados (SPERA, 1994).
O custo dos conversores de potência foi fator decisivo na forma em que o avanço das turbinas eólicas nas matrizes elétricas ocorreu. Inicialmente, a baixa penetração de turbinas eólicas
nas redes de transmissão e distribuição permitia que critérios mais baixos de qualidade para a
energia entregue por esta fonte fossem estabelecidos. Isto, somado ao custo ainda elevado das
tecnologias de velocidade variável, incentivou a implementação de turbinas de velocidade-fixa,
principalmente na configuração com geradores de indução tipo gaiola de esquilo.
3.1 MODELO AERODINÂMICO DE TURBINAS EÓLICAS
17
A redução no custo dos conversores de potência, juntamente à maturidade alcançada nas
tecnologias de turbinas eólicas de velocidade variável com conversor parcial, e a criação de requisitos de operação mais rígidos para turbinas eólicas conectadas aos sistemas elétricos, devido
ao maior nível de penetração atingido nos últimos anos, fizeram com que uma determinada configuração de turbina eólica dominasse o mercado na atualidade. Esta configuração de turbina
se utiliza do DFIG para atingir os padrões de qualidade de energia mais rígidos estabelecidos
pelos requisitos mais recentes dos operadores de redes e ainda permitir uma operação flexível
com maior nível de conversão de energia (ASSOCIATION et al., 2012).
A maturidade tecnológica atingida pelas turbinas eólicas nos últimos anos permitiu que se
atingisse um custo na energia gerada muito próximo das fontes tradicionais de energia. Isto
ocasionou uma rápida expansão, porém, a diversificação das fontes geradoras nas matrizes elétricas, com elevado grau de penetração de fontes descentralizadas, propõe novos desafios de
controle e gerenciamento das redes, o que faz com que as novas fontes renováveis tenham um
papel maior no controle do sistema, como a prestação de serviços ancilares à este, e impõe novos desafios tecnológicos às fontes descentralizadas para que o nível penetração destas fontes
continue crescendo (RESERVICES, 2014).
3.1
MODELO AERODINÂMICO DE TURBINAS EÓLICAS
O conhecimento do comportamento aerodinâmico das turbinas eólicas se mostra necessário
para os controles de extração de máxima potência. Com a inclusão da eletrônica de potência no
desenvolvimento das turbinas de velocidade variável, a faixa de velocidade de vento na qual é
possível se obter a melhor eficiência na conversão de energia foi expandida. Para que este controle seja possível, conhecer as características específicas do rotor em questão é fundamental.
Modelos bastante complexos para a modelagem do comportamento do rotor da turbina, que
utilizam o método do momento dos elementos de pá (do inglês: Blade Element MomentumBEM), podem ser aplicados. Porém, o esforço computacional seria bastante grande para a sua
associação com os modelos necessários para os estudos de transitórios mecânicos e elétricos.
Sendo assim, modelos simplificados são normalmente aplicados para este fim. Akhmatov
(2002) mostra que para análises de transitórios elétricos, como a estabilidade transitória e a
estabilidade de tensão, pode-se considerar a velocidade do vento estacionária, já que, a variação
da velocidade angular mecânica da turbina, se comparada a escala de tempo dos fenômenos
elétricos, não seria rápida o suficiente para ter um impacto significativo nas análises. Sob estas
considerações, foi possível afirmar que a representação da parte aerodinâmica da turbina pela
sua curva CP − λ é suficientemente precisa nestes casos.
Desta forma, as curvas da potência mecânica (PM ) extraída pelo rotor da turbina de acordo
com a velocidade do vento (V) e com o coeficiente de potência da turbina (CP ), podem ser
3 TURBINAS DE VELOCIDADE VARIÁVEL
18
obtidas por:
PM = 1 2σARV 3 πR2CP (λ )
(1)
Onde, σ AR é a densidade do ar, R o raio da área circular varrida pelo rotor e λ é a relação
linear entre a velocidade do vento e a velocidade de ponta das pás.
O coeficiente CP pode ser derivado de cálculos computacionais ou obtido diretamente dos
dados de campo. Este coeficiente indica a eficiência na qual o rotor converte a energia cinética do vento em energia mecânica, onde, segundo o limite de Betz para turbinas horizontais
de três pás, o valor máximo possível é de 0,59 ou 59%. Ainda, como demostrado por Heier
(1998), grupos de curvas CP − λ podem ser representados de forma aproximada por funções
não lineares. Este modelo pode ser derivado da seguinte forma:
−c7/
λi
CP (λ , β ) = c1.(c2 λi − c3.β − c4.β c5 − c6).e
(2)
Onde,
λi =
1
λ +c8.β
1
− β 3c9+1
(3)
Coeficiente de Potência (Cp)
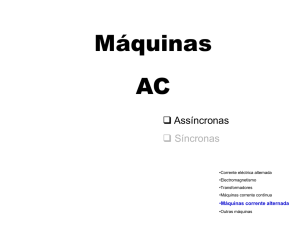
e β indica o ângulo de passo das pás da turbina em graus. Os coeficientes disponibilizados
por Heier, elaborados com base em turbinas pré 1992, são: c1=0,5, c2=116, c3=0,4, c4=0,
c5=2, c6=5, c7=21, c8=0,08 e c9=0,035. Utilizando-se estes fatores, o grupo de curvas CP − λ
ilustrado na Figura 1 é obtido.
β = 0°
β = 5°
0.4
β = 10°
β = 15°
0.3
β = 20°
0.2
0.1
0
0
5
10
Relação de velocidade (λ)
15
Figura 1 - Curvas CP − λ baseadas nos coeficientes de Heier para diferentes ângulos de passo.
Posteriormente, os parâmetros apresentados por Heier foram atualizados por Slootweg, Polinder e Kling (2003) para que o grupo de curvas CP − λ se adequasse melhor às turbinas eólicas
de 3 pás modernas. Os novos valores apresentados são: c1=0,73, c2=151, c3=0,58, c4=0,002,
19
3.1 MODELO AERODINÂMICO DE TURBINAS EÓLICAS
Coeficiente de Potência (Cp)
c5=2,14, c6=13,2, c7=18,4, c8=-0,02 e c9=-0,003. A Figura 2 ilustra o novo grupo de curvas
CP − λ obtido por Slootweg.
0.5
β = 0°
β = 5°
0.4
β = 10°
β = 15°
0.3
β = 20°
0.2
0.1
0
5
10
15
Relação de velocidade (λ)
Figura 2 - Curvas CP − λ baseadas nos coeficientes de Slootweg para diferentes ângulos de passo.
Desta forma, o presente trabalho utilizará as curvas CP − λ obtidas por Slootweg, Polinder
e Kling (2003) como modelo aerodinâmico da turbina, sendo este, bastante utilizado em modelos de turbinas eólicas de velocidade variável para análise dinâmica de transitórios elétricos.
Vale ressaltar que a análise da documentação de diferentes turbinas modernas mostra que os
comportamentos de suas curvas de potência são similares (ACKERMANN, 2005). Isso permite
afirmar que a utilização de um modelo aerodinâmico genérico, como o aqui citado, é adequada
para o estudo pretendido.
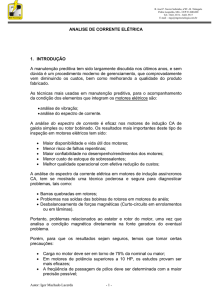
Potência Mecânica (p.u.)
As curvas da potência mecânica da turbina pela velocidade angular do rotor extraídas do
modelo implementado nesta tese, para cada velocidade de vento e assumindo β =0, são mostradas na Figura 3.
1
5 m/s
6 m/s
7 m/s
8 m/s
9 m/s
10 m/s
11 m/s
12 m/s
13 m/s
14 m/s
15 m/s
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Velocidade Angular do Rotor (p.u.)
Figura 3 - Curvas de potência da turbina implementada.
Nota-se, através da Figura 3, que a turbina em questão atinge sua potência nominal para a
velocidade do vento de 15 m/s. O controle de máxima potência se utilizará destas curvas para
determinar a potência, e a respectiva velocidade angular da turbina, para que se possa obter a
melhor eficiência do rotor para cada velocidade do vento.
3 TURBINAS DE VELOCIDADE VARIÁVEL
20
3.2
MODELO DO ACOPLAMENTO MECÂNICO
Em turbinas de velocidade fixa a consideração do modelo do acoplamento mecânico se
mostra essencial, devido à influência que a relativa flexibilidade do eixo de baixa velocidade
tem sobre a resposta do gerador elétrico, principalmente durante e após desequilíbrios de tensão
e curto-circuitos na rede elétrica.
Diferentemente do que acontece nas turbinas de velocidade fixa, turbinas de velocidade variável apresentam um grande desacoplamento entre as variáveis mecânicas e elétricas da turbina
pelo uso dos conversores de potência. Desta forma, as estratégias de controle dos conversores
determinam o quanto as propriedades e o comportamento do acoplamento mecânico influenciam nas variáveis elétrica da máquina. Não é incomum que devido a este desacoplamento
em alguns modelos de turbinas de velocidade variável o acoplamento mecânico seja ignorado
(ACKERMANN, 2005).
Quando considerado o acoplamento mecânico, tanto para turbinas de velocidade fixa quanto
de velocidade variável, a utilização do modelo de duas massas é o mais usual. Neste modelo,
pode-se considerar apenas as características do eixo de baixa velocidade, assumindo que a rigidez dos engrenamentos e do eixo de alta velocidade é infinita (ACKERMANN, 2005), ou
pode-se considerar a rigidez e coeficiente de amortecimento equivalentes de todo o sistema,
que podem ser derivados de modelos mais complexos como o modelo de cinco massas (GIRSANG et al., 2014).
No modelo implementado neste trabalho, a primeira preposição é adotada. Logo, os momentos de inércia dos eixos e engrenamentos são desconsiderados, pois seus valores são reduzidos se comparados aos momentos de inércia do rotor da turbina e do gerador elétrico.
As equações dinâmicas do modelo de duas massas podem ser referenciadas à turbina ou ao
gerador. Neste caso, as equações serão apresentadas referenciadas ao lado do gerador, assim
como está referenciado o diagrama do sistema equivalente apresentado na Figura 4.
‘
J wtr
‘
Ω wtr
D‘e
Ω gen
J gen
‘
‘
T wtr
k se
T gen Gerador
Rotor
Figura 4 - Modelo de duas massas para o acoplamento mecânico da turbina.
Fonte: Adaptado de: (IOV et al., 2004)
3.3 GERADOR DE INDUÇÃO DUPLAMENTE ALIMENTADO
21
Onde J, T e Ω representam o momento de inércia, o torque e a velocidade mecânica, respectivamente. Os subscritos indicam a qual lado a grandeza está associada, sendo que wtr é
relacionado ao rotor da turbina e gen ao gerador elétrico. O sobrescrito ’ indica que as grandezas não relacionadas diretamente ao gerador elétrico estão referenciadas a ele. D’e é o fator de
amortecimento torcional equivalente e K’se é a constante elástica que indica a rigidez torcional
equivalente do sistema.
Segundo as equações dinâmicas do modelo de duas massas (IOV et al., 2004), o torque do
rotor, referenciado ao lado do gerador, é dado por:
0
0
0
0
0
dΩ wtr
+ D e (Ω wtr − Ωgen ) + k se (θ wtr − θgen )
T wtr = J wtr
dt
0
0
onde,
(4)
0
dθ wtr
Ω wtr =
dt
e o torque do gerador é obtido pela seguinte equação:
0
−Tgen = Jgen
dΩgen
0
0
0
0
+ D e (Ωgen − Ω wtr ) + k se (θgen − θ wtr )
dt
(5)
(6)
sendo,
Ωgen =
dθgen
dt
(7)
A rigidez torcional equivalente do sistema é dada por:
1
=
0
k se
1
kwtr
k2 gear
+
1
kgen
(8)
onde, kgear é a relação de transmissão das engrenagens na caixa multiplicadora. O momento de
inércia do rotor referenciado ao lado do gerador é dado por:
1
0
J wtr =
3.3
k2
Jwtr
(9)
gear
GERADOR DE INDUÇÃO DUPLAMENTE ALIMENTADO
A turbina eólica com DFIG associado tornou-se a configuração mais utilizada nos sistemas
ao redor do mundo já no início dos anos 2000, tomando o posto até então ocupado pelas turbinas
de velocidade fixa, principalmente na configuração com gerador de indução gaiola de esquilo
(ACKERMANN, 2005).
A consolidação desta configuração de turbina, fez com que a geração de energia elétrica
por turbinas eólicas de velocidade variável se tornasse uma realidade. Sendo este, um fator
22
3 TURBINAS DE VELOCIDADE VARIÁVEL
importante na ratificação da energia eólica como fonte com grande participação de geração em
sistemas elétricos de diversos países, com destaque para a Dinamarca que em 2014 obteve 34%
de sua energia provinda desta fonte (WWEA, 2015).
Esta liderança de mercado se mantém até os dias atuais e impulsiona novos estudos que
focam em permitir que o DFIG possa aumentar sua colaboração junto à diversos aspectos de
qualidade de energia do sistema elétrico, permitindo assim que seu nível de penetração possa
atingir valores ainda mais elevados (ASSOCIATION et al., 2012).
A ideia de se utilizar o acesso ao rotor do gerador de indução do tipo rotor bobinado para
controlar o escorregamento da máquina, permitindo assim um controle de velocidade variável,
vem do início do século XX.
Nesta época, pode-se destacar o sistema Krämer, proposto por C. Krämer em 1908, que foi
primeiramente comercializado pela Westinghouse Electric Company, onde não era necessário o
uso de máquinas rotativas especializadas.
No sistema Krämer o rotor da máquina de indução era conectado eletricamente a um conversor síncrono (conversor rotativo), que fornecia a tensão com frequência variável necessária
ao controle do escorregamento. O lado DC do conversor síncrono era conectado também eletricamente a uma máquina DC comum, a qual poderia ser acoplada ao eixo da máquina de indução
para retornar à potência do rotor mecanicamente (sistema de potência constante) ou poderia ser
ligada a uma terceira máquina de indução ou síncrona para que a energia de escorregamento
retornasse à rede (sistema de torque constante). Porém, este sistema apresentava instabilidade
quando operando próximo a velocidade síncrona do motor de indução (BLALOCK, 2007).
Outro sistema que se baseou no mesmo princípio no início do século XX foi o sistema
Scherbius, desenvolvido por Arthur Scherbius na cidade de Zurich - Suiça e que teve seu primeiro modelo comercializado pela General Electric por volta de 1916.
No sistema Scherbius, a tensão de frequência variável para o rotor da máquina de indução
era produzida por uma máquina auxiliar chamada máquina reguladora Scherbius, que consistia
em uma máquina comutadora trifásica onde o enrolamento de campo trifásico no estator possuía
três jogos de escovas defasados em 120◦ elétricos. Esta máquina também podia ser acoplada
diretamente ao eixo da máquina de indução retornando a potência de escorregamento como
energia mecânica, ou acoplada à uma terceira máquina de indução ou síncrona para retornar esta
energia à rede (BLALOCK, 2007). Diversos sistemas propostos para a operação em velocidade
variável do gerador de indução no início do século XX podem ser encontrados em Behrend
(1921).
Com a evolução dos componentes eletrônicos de estado sólido, baseados nos transistores de
junção p-n desenvolvidos no início da década de 50, uma nova era no acionamento de máquinas
elétricas tem início. A retomada do desenvolvimento de turbinas eólicas na década de 70 se uti-
23
3.3 GERADOR DE INDUÇÃO DUPLAMENTE ALIMENTADO
lizou dessas novas possibilidades de acionamento de máquinas elétricas para o desenvolvimento
de turbinas de velocidade variável.
Na década de 80, as primeiras turbinas que se utilizavam de configurações de geradores
elétricos precursoras do DFIG entraram em operação. Foram estas, a turbina Growian de 3
MW ( Alemanha-1982), a turbina NASA MOD-0 Plum Brook em sua última configuração de
gerador elétrico (EUA-1985) e a turbina NASA MOD-5B (Havaí-1987). Estas turbinas tiveram
diferentes graus de sucesso, porém nenhuma delas operou por mais de uma década(CARLIN;
LAXSON; MULJADI, 2003).
Outra evolução no desenvolvimento do DFIG foi a expansão da teoria dos eixos d-q de Park
(1933), inicialmente desenvolvida para máquina síncronas, para máquinas de indução de rotor
bobinado por Krause, Wasynczuk e Hildebrandt (1988). Baseados nesta teoria, Yamamoto e
Motoyoshi (1991) propuseram o primeiro controle independente de potência ativa e reativa e,
até hoje, novas filosofias de controle têm sido propostas baseadas na teoria dos eixos d-q.
3.3.1
Conversores e suas funções
O DFIG se baseia na utilização de um conversor de potência back-to-back conectado entre
a rede elétrica e o rotor da máquina de indução, de forma a fornecer tensão de módulo, ângulo
e frequência variável para o controle de escorregamento. O estator da máquina é acoplado
diretamente à rede.
Esta configuração se mostra vantajosa em relação às configurações de turbina com conversor total se comparado o custo do conversor, já que este possui apenas uma fração da potência
do gerador, cerca de 30% de sua potência nominal. A faixa de variação de velocidade é de 40% a +30% da velocidade síncrona da máquina. A Figura 5 ilustra o DFIG e seus conversores
(ACKERMANN, 2005).
Pm
Pm
GRID
DFIG
Gearbox
Pm/ (1-s)
Lg
-s Pm/ (1-s)
RSC
Step-up
Transformer
GSC
Figura 5 - DFIG e seus conversores.
O conversor pode injetar ou absorver energia da rede elétrica de acordo com o escorregamento da máquina. No modo subsíncrono (s>0), o conversor absorve potência ativa da rede e
3 TURBINAS DE VELOCIDADE VARIÁVEL
24
a injeta no rotor da máquina. Já no modo supersíncrono (s<0), o processo inverso acontece,
e o conversor injeta potência ativa na rede. Os fluxos de potência, tanto do rotor quanto do
estator, podem ser verificados substituindo-se valores positivos ou negativos de s nas equações
presentes na Figura 5.
Potência da do DFIG (p.u.)
A função de controle da velocidade angular do eixo da máquina, visando a extração de
energia ótima pelo rotor da turbina de acordo com a velocidade do vento, é dada pela variação
do escorregamento da máquina de indução. Esta estratégia de controle é dividida em duas
regiões com objetivos distintos, como apresentado na figura 6.
1.2
REGIÃO DE EXTRAÇÃO DE MÁXIMA POTÊNCIA
Operação em velocidade variável e β=0
1
REGIÃO DE POTÊNCIA LIMITADA
Operação em velocidade fixa e potência
limitada pelo incremento de β
0.8
0.6
0.4
0.2
0
0
5
15
Velocidade do Vento (m/s)
25
Figura 6 - Regiões de operação da turbina.
Na primeira região, após a partida e antes da turbina atingir sua potência nominal, controlase o escorregamento da máquina de forma a se obter a velocidade angular do rotor da turbina
na qual existe a máxima eficiência na extração de energia do vento para a situação específica.
Na segunda região, após a turbina atingir sua velocidade nominal, a turbina passa a operar
com velocidade fixa, e o controle do ângulo de passo se torna responsável por limitar a extração
de potência pelo rotor.
Além do controle de velocidade variável, outros diversos controles foram e continuam
sendo desenvolvidos e implementados junto ao DFIG. Estes controles podem ser organizados
em 3 níveis de objetivos (ABAD et al., 2011):
1. Regular o fluxo de potência entre a rede e o gerador elétrico. O RSC é controlado de
forma a desassociar o torque eletromecânico da máquina e a potência reativa do estator.
2. Controlar a conversão da energia do vento em energia mecânica, ou seja, a quantidade de
energia extraída pelo rotor. Regular o torque da máquina e os ângulos das pás de forma
que o rotor opere com máxima eficiência (controle de máxima potência) e mantendo a
turbina dentro dos limites de velocidade.
3. Dedicado à integração à rede, este nível de controle presta assistência ao bom funcionamento da mesma, permitindo:
25
3.3 GERADOR DE INDUÇÃO DUPLAMENTE ALIMENTADO
• Atender às necessidades de potência ativa e reativa determinadas pelo operador da
rede.
• Prover serviços ancilares: Controles de tensão e frequência, ou resposta inercial.
As diferentes estratégias podem ser implementadas modificando-se a forma com que ambos
os lados do conversor realizam as suas funções básicas. O RSC é responsável pela tensão
fornecida ao rotor da máquina de indução. A ele estão associados principalmente o controle
do escorregamento da máquina, de potência ativa/reativa e do torque eletromagnético. O GSC
controla o fluxo de potência entre o rotor da máquina e a rede elétrica, sendo suas funções
básicas o controle da tensão do barramento DC e da potência ativa/reativa injetada ou absorvida.
Outros controles específicos ainda podem ser associados a estes, como estratégias de controle
sob condições de falta na rede elétrica, funções de regulador de velocidade, de resposta inercial,
etc.
Os controles principais de operação do DFIG estão associados às tensões fundamentais dos
conversores, também tratadas como tensões de sequência positiva. Utilizando-se a decomposição nos eixos d-q para as variáveis da máquina de indução desenvolvida por Krause, Wasynczuk
e Hildebrandt (1988), pode-se estabelecer diferentes objetivos de controle para as componentes
de eixo direto e de quadratura. A Figura 7 traz o diagrama de blocos dos controles de extração
de máxima potência e de potência ativa/reativa feito através do RSC, com as variáveis apresentadas nos eixos d-q. Vale ressaltar que, neste caso, o plano d-q está referenciado à tensão do
estator da máquina.
P*(pu) +
-
PI
Ir+d*
P(pu)
-
Ird
Irabc
abc
dq0
Irq
-
ø
Q*(pu) = 0
+ -
+
+
PI
PI
PI
Ur+d*
dq0
Ur+q*
Ur+abc*
abc
ø
Ir+q*
Q(pu)
Figura 7 - Diagrama de blocos do controle do RSC .
Na Figura 7, a potência ativa de referência (P*(pu)) é obtida através do modelo aerodinâmico da turbina, de acordo com a velocidade do vento, para que esta opere em seu ponto ótimo
de extração de energia. Ela é então comparada com a potência ativa medida (P(pu)) para que
3 TURBINAS DE VELOCIDADE VARIÁVEL
26
a referência da componente d da corrente do rotor seja obtida por um controlador do tipo proporcional integral (do inglês: Proportional Integral - PI). Após comparada à corrente medida no
rotor do gerador de indução, e o erro entre a corrente calculada e medida ser inserido em um
controlador PI, a componente d da tensão do rotor de referência a ser inserida no conversor é
estabelecida.
O procedimento para a componente q é similar, e controla a potência reativa inserida pelo
DFIG na rede elétrica. A potência reativa de referência, que neste trabalho será sempre considerada zero, é comparada à potência reativa medida do DFIG, e após a inserção do erro no
controlador PI, a referência da componente q da corrente do rotor é obtida. Esta é também
comparada à corrente medida, e novamente após a inserção do erro em um controlador PI, a
componente q da tensão de referência do rotor é obtida.
O controle da tensão fundamental do GSC tem como objetivo manter a tensão no barramento DC, e consequentemente efetuar a troca de potência entre o rotor da máquina e a rede
elétrica. O controle de potência ativa/reativa entre o GSC e a rede também é realizado pela componente de sequência positiva de tensão. A Figura 8 traz o diagrama de blocos dos controles do
GSC.
Vdc*(pu) +
-
PI
Igsc+d*
Vdc(pu)
-
Igscd
Igscabc
abc
dq0
+
Igscq +
-
ø
Q*(pu) = 0
+ -
PI
PI
PI
Ugsc+d*
dq0
Ugsc+q*
Ugsc+abc*
abc
ø
Igsc+q*
Q(pu)
Figura 8 - Diagrama de blocos do controle do GSC.
Como apresentado na Figura 8, a componente d da tensão do GSC é responsável pelo
controle da tensão do barramento DC. Onde a tensão DC de referência é comparada à tensão
medida no barramento, e após a inserção do erro no controlador PI, a componente de referência
d da corrente é obtida. Com a comparação entre as componentes d das correntes de referência
e medida, e com o erro inserido em um controlador PI, a componente d da tensão de referência
para o GSC é obtida.
A componente q da tensão do GSC é responsável pela troca de potência reativa entre o
conversor e a rede. Neste trabalho, o valor de referência da potência reativa para o GSC é
27
3.3 GERADOR DE INDUÇÃO DUPLAMENTE ALIMENTADO
sempre zero, Q*(pu)=0. A potência reativa de referência é comparada com a potência reativa
medida, e o erro aplicado a um controlador PI para a obtenção da corrente q de referência. Após
a comparação das componentes q das correntes de referência e medida, e a inserção do erro em
um controlador PI, a componente q da tensão de referência do conversor é obtida.
3.3.2
Modelo da máquina de indução
A representação dinâmica da máquina de indução trifásica, utilizada para a análise de transitórios eletromagnéticos, é feita pelo modelo referenciado aos vetores espaciais d-q. Neste
modelo não são consideradas as perdas no ferro e a saturação. O equacionamento no sistema
de coordenadas abc e o desenvolvimento para o sistema de coordenadas d-q podem ser encontrados em Krause, Wasynczuk e Hildebrandt (1988). Vale ressaltar que usualmente o estator da
máquina é conectado em delta ou estrela não aterrada, o que impede a circulação de corrente de
sequência zero, mesmo que esta sequência esteja presente na tensão. Assim, esta componente
pode ser desprezada nos equacionamentos.
As variáveis da máquina, no modelo apresentado, estão no sistema por unidade (do inglês:
per-unit system - p.u.). Logo, os fatores de multiplicação das equações de potência, que aparecem quando as variáveis são consideradas no Sistema Internacional de Unidades (do inglês:
International System of Units - SI), aqui não estão presentes.
A Figura 9 ilustra a representação T do circuito equivalente do DFIG no plano de referência
síncrono de sequência positiva (dq)+. Neste caso, todas as variáveis estão referidas ao estator
da máquina.
Rs
Rr
Lσs
Lσr
+
+
sdq
i rdq
i
U
+
sdq
Lm
+
sdq
-jω1ψ
U
+
rdq
+
rdq
-j(ω1-ωr)ψ
Figura 9 - Circuito equivalente da Máquina de Indução.
Na Figura 9, ω 1 é a frequência síncrona, ω r é a frequência angular do rotor convertida em
frequência elétrica e (ω 1 - ω r ) é a frequência de escorregamento. Lm é a indutância de magnetização, Lσ s (Lσ r ) são as indutâncias de dispersão do estator (rotor) e Rs (Rr ) são as resistências
do estator (rotor). U+ sdq (U+ rdq ), I+ sdq (I+ rdq ) e ψ + sdq (ψ + rdq ) são as tensões, correntes e fluxos
do estator (rotor) referenciadas ao plano de referência síncrono.
3 TURBINAS DE VELOCIDADE VARIÁVEL
28
De acordo com o circuito equivalente do DFIG, no plano de referência síncrono que é
representado nas equações pelo sobrescrito + , as tensões do estator e do rotor da máquina podem
ser expressas por (KUNDUR; BALU; LAUBY, 1994):
.
+
+
+
+
Usdq
= Rs Isdq
+ dψsdq
dt + jω1 ψsdq
(10)
.
+
+
+
+
Urdq
= Rr Irdq
+ dψrdq
dt + j(ω1 − ωr )ψrdq
(11)
e os fluxos do estator e do rotor são dados por:
+
+
+
ψsdq
= Ls Isdq
+ Lm Irdq
(12)
+
+
+
ψrdq
= Lm Isdq
+ Lr Irdq
(13)
Ls = Lm + Lσ s
(14)
Lr = Lm + Lσ r
(15)
onde,
Ignorando-se o impacto das perdas em Rs , pode-se reexpressar a tensão do estator, apresentada em (10), da seguinte forma:
.
+
+
+
(16)
≈ dψsdq
dt + jω1 ψsdq
Usdq
Ainda, de acordo com a equação do fluxo estatórico (12), a corrente do estator I+ sdq pode
ser expressa por:
.
+
+
+
Isdq = (ψsdq − Lm Irdq ) Ls
(17)
Para a determinação das potências da máquina de indução é necessário se utilizar produtos
entre números complexos, onde o produto comum é dado por:
(ZW ) = (Z1 + jZ2 )(W1 + jW2 ) = Z1W1 + Z2W2 + j(Z2W1 − Z1W2 )
(18)
o produto real:
.
0
0
(Z.W ) = (Z1 + jZ2 ).(W1 + jW2 ) = (Z W + ZW ) 2 = Z1W1 + Z2W2
(19)
e o produto complexo:
.
0
0
(Z ×W ) = (Z1 + jZ2 ) × (W1 + jW2 ) = (Z W − ZW ) 2 = j(Z1W2 − Z2W1 )
(20)
Utilizando-se os produtos complexos pode-se agora definir as potências ativa e reativa do
estator da máquina. Sendo o referencial adotado P positivo para a máquina operando como
3.3 GERADOR DE INDUÇÃO DUPLAMENTE ALIMENTADO
29
gerador:
+ ˆ+
+ +
+ +
+ +
Ps = −Re(Usdq
Isdq ) = −Re(Usdq
.Isdq ) = −(Usd
Isd +Usq
Isq )
(21)
+ ˆ+
+
+
+ +
+ +
Qs = −Im(Usdq
Isdq ) = Im(Usdq
× Isdq
) = −(Usd
Isq −Usq
Isd )
(22)
De acordo com o circuito equivalente referenciado ao estator da máquina, a potência eletromagnética é estabelecida pela soma das potências exportadas pelas fontes de tensão jω 1 ψ + sdq e
j(ω 1 − ω r )ψ + sdq . O referencial adotado é Pe negativo para a máquina operando como gerador,
onde:
+ ˆ+
+ ˆ+
Pe = Re[ jω1 ψsdq
Isdq + j(ω1 − ωr )ψrdq
Irdq ]
(23)
ou,
+
+
+
+
Pe = −Re[ jω1 ψsdq
× Isdq
+ j(ω1 − ωr )ψrdq
× Irdq
]
(24)
Substituindo-se I+ sdq e ψ + rdq por (17) e (13), é possível realizar a seguinte simplificação em
(23) e (24), respectivamente:
+ +
Pe = ωr (Lm Ls )Im(ψsdq
rdq )
(25)
+
+
Pe = −ωr (Lm Ls )Im (ψsdq
× Irdq
)
(26)
Por meio de Pe , o torque eletromagnético pode ser obtido da seguinte forma:
Te = pPe ωr
(27)
onde, p é o número de pares de polos da máquina de indução.
No referencial adotado neste trabalho, o eixo d do plano de referência d-q é alinhado com a
fase a da tensão do estator. Desta forma, a simplificação U+ sq =0 é verdadeira e pode ser adotada
nas simplificações durante o desenvolvimento das equações.
30
3 TURBINAS DE VELOCIDADE VARIÁVEL
31
4
DESEQUILÍBRIO DE TENSÃO
Devido à localidade das regiões com grande potencial eólico disponível, turbinas eólicas
são frequentemente conectadas à redes de transmissão e distribuição consideradas fracas, onde
a susceptibilidade à desequilíbrios de tensão é maior. O desequilíbrio de tensão possui diversas
causas, entre os principais fatores que o ocasionam pode-se citar: assimetrias nas cargas, transformadores e impedâncias da rede, e também faltas desequilibradas (JOUANNE; BANERJEE,
2001).
O desequilíbrio de tensão influencia a operação dos dispositivos de potência, transformadores e geradores elétricos. No caso específico de máquinas de indução, os efeitos negativos
encorajaram a elaboração e publicação de padrões para limitar a potência de operação da máquina de acordo com o grau de desequilíbrio.
A Associação Nacional de Fabricantes de Equipamentos Elétricos, (do inglês: National
Electrical Manufacturers Association -NEMA) em sua publicação de padrões MG 1-1993 (NEMA,
2009), recomenda o uso de um fator de redução de potência no caso de desequilíbrio de tensão
de até 5%, acima deste limite a operação não é recomendada.
O uso do fator de redução de potência e seus efeitos sobre a temperatura da máquina é
apresentado por Berndt e Schmitz (1962). Os impactos do desequilíbrio de tensão, não apenas
sobre a temperatura, mas também sobre as perdas e a vida útil do isolamento da máquina de
indução, são demonstrados por Woll (1975).
Em Lee (1999), é demonstrado que não apenas o desequilíbrio em porcentagem influencia
os parâmetros da máquina de indução, mas também o valor da componente fundamental de tensão durante o desequilíbrio. Os experimentos realizados mostram que nos casos de subtensão,
para um mesmo índice porcentual de desequilíbrio, a máquina apresenta valores mais elevados
de temperatura nos enrolamentos.
Faiz e Ebrahimpour (2005) mostram que para se estabelecer um fator preciso de redução de
potência é necessário não só levar em consideração a porcentagem de desequilíbrio e a amplitude da componente de tensão de sequência positiva, mas também o ângulo da componente de
tensão de sequência negativa.
A Figura 10 ilustra os efeitos do desequilíbrio de tensão sobre a temperatura, perdas e
isolamento da máquina de indução de acordo com o apresentado por Woll (1975). As curvas
foram obtidas para o motor operando com carga nominal e temperatura ambiente de 40◦ C. De
acordo com a Figura 10a e de acordo com NEMA (2009), nos enrolamentos da fase de maior
4 DESEQUILÍBRIO DE TENSÃO
32
corrente o aumento porcentual da temperatura é aproximadamente duas vezes o quadrado do
porcentual de desequilíbrio de tensão. Ainda, pode-se observar que as perdas aumentam cerca
de 35% para um desequilíbrio de tensão de 5%.
100
Aquecimento
Perdas
Aumento (%)
80
60
40
20
0
0
2
4
6
8
10
Desequilíbrio de tensão (%)
(a) Temperatura e Perdas
Vida relativa do isolamento
6
Fator de serviço 1.0 - Isolamento classe F
Fator de serviço 1.0 - Isolamento classe B
Fator de serviço 1.15 - Isolamento classe F
Fator de serviço 1.15 - Isolamento classe B
4
3
2
1.5
1
0.8
0.6
0.4
0.3
0
0
1
2
3
4
5
Desequilíbrio de tensão (%)
(b) Vida útil do isolamento
Figura 10 - Impacto do desequilíbrio de tensão na máquina de indução.
Fonte: Adaptado de: (WOLL, 1975)
A Subfigura 10b mostra a severa redução na vida útil no enrolamento da máquina com o
aumento do nível de desequilíbrio de tensão, de acordo com seu fator de serviço e classe de
isolamento. Nota-se, por exemplo, que um motor de classe de isolamento F, e operando fator de
serviço 1.15, apresenta uma vida útil 5.5 vezes maior que este mesmo motor operando com fator
de serviço 1.0. Operando continuamente sob um desequilíbrio de tensão de 5% sua vida útil cai
para o mesmo valor que teria se operasse com fator de serviço 1.0 sob tensão equilibrada.
O índice de desequilíbrio apresentado na Figura 10 está de acordo com o estabelecido pelos
padrões NEMA. Sengundo NEMA (2009), o porcentual de desequilíbrio de tensão (do inglês:
33
4.1 COMPONENTES SIMÉTRICAS
Voltage Unbalance Percentage - VUP) é estabelecido da seguinte forma:
VUP(%) =
máximo desvio do valor médio de tensão
× 100
valor médio de tensão
(28)
Neste trabalho, é utilizado o fator de desequilíbrio de tensão (do inglês: Voltage Unbalance
Factor - VUF) estabelecido pela Comissão Eletrotécnica Internacional (do inglês: International
Electrotechnical Commission - IEC), que usa a definição por componentes simétricas. O VUF
é estabelecido da seguinte forma (JOUANNE; BANERJEE, 2001):
V2
× 100%
(29)
V1
onde, V1 e V2 são as componentes de sequência positiva e negativa de tensão, respectivamente.
VUF =
4.1
COMPONENTES SIMÉTRICAS
A teoria das componentes simétricas, também conhecido como Teorema de Fortescue, foi
desenvolvida por Fortescue (1918). Este método possui aplicação na solução de diversos problemas em sistemas de potência como: análise e classificação de faltas assimétricas, mitigação
de desequilíbrios de corrente e tensão e, principalmente, análise da operação em regime permanente de máquinas de indução desequilibradas, sendo este o tema que provavelmente motivou
Fortescue no desenvolvimento do método e onde ele obteve aplicação imediata (KRAUSE,
1985).
Krause (1985) mostra a aplicação do método das componentes simétricas conjuntamente
com a teoria do plano de referência síncrono. O que posteriormente possibilitou o controle
da máquina com objetivos distintos para as componentes de sequência positiva e negativa, e
também, para as componentes d-q de cada uma destas componentes.
4.1.1
Decomposição do modelo nos eixos d-q da máquina de indução
Durante a operação em regime desequilibrado as tensões, correntes e fluxos apresentam
componentes de sequência positiva e negativa. Utilizando-se F para representar os vetores
associados à maquina de indução, e os decompondo nos componentes citados tem-se (XU; HU;
HE, 2012):
Fαβ (t) = Fαβ + (t) + Fαβ − (t)
(30)
Agora, separando-se o módulo e a parte rotacional, para uma variável associada ao estator
da máquina, indicada nas equações pelo subscrito s , obtêm-se:
Fsαβ (t) = Fsαβ + (t) e j(ω1t+ϕ+ ) + Fsαβ − (t) e− j(ω1t+ϕ− )
(31)
4 DESEQUILÍBRIO DE TENSÃO
34
onde, os subescritos + e - representam as componentes de sequência positiva e negativa, com
ϕ + e ϕ - sendo as fases iniciais e ω 1 a frequência síncrona. Reexpresando-se F nos planos das
coordenas síncronas do estator de sequência positiva (sdq)+ e negativa (sdq)-, indicadas nas
equações pelos sobrescritos + e - , chega-se a:
+
Fsdq
= Fsαβ e− jω1t
(32)
−
Fsdq
= Fsαβ e jω1t
(33)
Da mesma forma, os vetores associados ao rotor da máquina, indicados nas equações pelo
subscrito r , nas coordenas síncronas do rotor de sequência positiva (rdq)+ e negativa (rdq)-,
podem ser definidos:
+
Frdq
= Frαβ e− j(ω1 −ωr )t
(34)
−
Frdq
= Frαβ e j(ω1 +ωr )t
(35)
Reescrevendo-se as variáveis do estator da máquina decompostas em termos de suas componentes de sequência positiva/negativa, nos plano de referência (sdq)+, que rotaciona na frequência
ω 1 , obtêm-se:
+
+
+
Fsdq
= Fsdq+
+ Fsdq−
(36)
ou,
−
+
+
+ Fsdq−
e− j2ω1t
= Fsdq+
Fsdq
(37)
Da mesma forma, pode-se proceder com as variáveis do rotor da máquina. Onde, o plano
de referência (rdq)+ rotaciona na frequência (ω 1 -ω r ), logo:
+
+
+
+ Frdq−
= Frdq+
Frdq
(38)
−
+
+
Frdq
= Frdq+
+ Frdq−
e− j2ω1t
(39)
ou,
Agora, é possível obter as equações da máquina de indução de forma decomposta. Primeiramente, aplicando esta técnica sobre a tensão do estator apresentada em (16), uma nova
equação é obtida:
.
+
+
−
+
−
Usdq
≈ d(ψsdq+
+ ψsdq−
e− j2ω1t ) dt + jω1 (ψsdq+
+ ψsdq−
e− j2ω1t )
(40)
Aplicando-se a derivada sobre o primeiro termo da equação e somando-se o resultado ao
segundo, chega-se a:
+
+
−
Usdq
≈ jω1 (ψsdq+
− ψsdq−
e− j2ω1t )
(41)
A equação da corrente do estator (17) decomposta em termos de suas componentes de
35
4.1 COMPONENTES SIMÉTRICAS
sequência positiva/negativa é dada por:
.
+
+
−
+
−
Isdq
= (ψsdq+
+ ψsdq−
e− j2ω1t ) Ls − Lm (Irdq+
+ Irdq−
e− j2ω1t )/Ls
(42)
As equações das potências ativa e reativa do estator podem ser decompostas em uma componente contínua, mais duas componentes pulsantes de frequência 2ω 1 . Para isto, deve-se
utilizar as formas decompostas da tensão e corrente do estator com seus termos exponenciais
representados na forma de seno e cosseno:
+
+
−
[cos(2ω1t) − jsen(2ω1t)]
Usdq
= Usdq+
+Usdq−
(43)
+
+
−
Isdq
= Isdq+
+ Isdq−
[cos(2ω1t) − jsen(2ω1t)]
(44)
Agora, substituindo-se (43) e (44) em (21) e (22), temos:
Ps = Ps,dc + Ps,cos 2 cos(2ω1t) + Ps,sen2 sen(2ω1t)
(45)
onde,
Ps,dc
Ps,cos 2 =
Ps,sen2
0
−
− L1s Usd−
−
Usq−
−
−
+
+
Usd+
Usq+
Usd−
Usq−
Lm
−
−
+
+
U
U
U
U
sq+
sq−
Ls
sd−
sd+
−
−
+
+
Usd+
−Usq+
Usq−
−Usd−
+
ψsd+
+
0
0
0
ψsq+
−
+
+
Usq−
Usd+
Usq+
ψ−
sd−
−
+
+
Usd+
−Usq+
−Usd−
−
ψsq−
+
Ird+
+
Irq+
−
Ird−
−
Irq−
(46)
A equação da potência eletromagnética também pode ser decomposta em uma componente
contínua mais duas componentes pulsantes de frequência 2ω 1 . Para isso, o fluxo do estator
e a corrente do rotor também devem ser utilizados de forma decomposta e com seus termos
exponenciais representados na forma de seno e cosseno:
+
+
−
ψsdq
= ψsdq+
+ ψsdq−
[cos(2ω1t) − jsen(2ω1t)]
(47)
+
+
−
Irdq
= Irdq+
+ Irdq−
[cos(2ω1t) − jsen(2ω1t)]
(48)
devem ser substituídos em (26), chegando-se a:
Pe = Pe,dc + Pe,cos 2 cos(2ω1t) + Pe,sen2 sen(2ω1t)
(49)
4 DESEQUILÍBRIO DE TENSÃO
36
onde,
−
−
+
+
Pe,dc
ψsd+
−ψsq−
ψsd−
−ψsq+
Lm ωr
−
−
+
+
ψsd−
−ψsq+
ψsd+
Pe,cos 2 = −
−ψsq−
Ls
−
−
+
+
Pe,sen2
ψsd−
ψsq−
−ψsd+
−ψsq+
+
Ird+
+
Irq+
−
Ird−
−
Irq−
(50)
As equações da máquina de indução decompostas em termos de suas componentes de
sequência positiva/negativa, aqui demonstradas, possibilitam estabelecer diferentes objetivos
de controle para cada uma destas sequências. Desta forma, é possível implementar os controles de sequência negativa, que englobam a injeção de corrente de sequência negativa, para a
compensação do desequilíbrio de tensão no ponto de acoplamento comum (do inglês: point
of commom coupling - PCC), e a redução das oscilações no torque eletromagnético, de forma
independente dos controles de sequência positiva, que consistem nos controles operacionais da
máquina.
4.1.2
Decomposição das variáveis medidas
Para a modelagem em termos das componentes de sequência positiva e negativa das variáveis da máquina de indução se faz necessária a decomposição dos sinais medidos. Para isto,
são implementados duplos integradores generalizados de segunda ordem geradores de sinais
em quadratura (do inglês: Dual Second Order Generalized Integrator−Quadrature Signal Generator - DSOGI−QSG) associados a loops de frequência (do inglês: Frequency Locked Loop
- FLL), como apresentado na Figura 13.
No DSOGI−QSG, a decomposição é feita no sistema de coordenadas α-β e depois as
variáveis são transformadas para as respectivas coordenadas d-q, de forma que todos os sinais
se comportem como componentes contínuas. Este método permite detectar os componentes
de sequência positiva e negativa mesmo em situações onde o sinal de entrada é extremamente
poluído e também quando apresenta variações de frequência. Este método foi formalizado em
Rodríguez et al. (2008).
O uso de Integradores Generalizados (do inglês: Generalized Integrators - GI’s) para controle de filtros ativos de potência em sistemas desequilibrados foi proposto inicialmente por
Yuan et al. (2002). O GI é um integrador duplo que atinge um valor de ganho infinito em determinada frequência, também chamada de frequência de ressonância, e praticamente não impõe
atenuação fora desta frequência.
Yuan et al. (2002) mostrou que o uso de GI’s no sistema de coordenadas estacionário pode
obter erro zero na obtenção de harmônicas quando em regime permanente. Em Teodorescu
et al. (2004), um filtro ressonante com base em GI’s foi elaborado para compensar correntes
harmônicas de ordens 3, 5 e 7. Como deficiência percebeu-se que a largura da faixa de passagem
37
4.1 COMPONENTES SIMÉTRICAS
do filtro não dependia apenas do ganho k do filtro, mas também da frequência de ressonância
do filtro ω’, o que dificultava seu ajuste.
A Figura 11 traz o diagrama de blocos de um filtro baseado no GI. Nele, v é o sinal de
entrada, v’ e qv’ são os sinais de saída ortogonais entre si e ε v é o erro entre v e v’, sendo que
estes possuem alinhamento de fase.
- ɛv
v
kɛv
k
+
vʹ
ʃ
+ GI
qvʹ
ʃ
X
ωʹ
2
Figura 11 - Filtro baseado em um integrador generalizado.
Para contornar as limitações iniciais dos filtros baseados em GI’s, uma nova configuração
denominada integrador generalizado de segunda ordem gerador de sinais em quadratura (do
inglês: Second Order Generalized Integrator−Quadrature Signal Generator - SOGI−QSG) foi
formalizada em Rodriguez et al. (2006b).
O SOGI−QSG resolveu a limitação da interdependência entre a frequência de ressonância e
a largura da faixa de passagem. Além disto, este método assegurou a quadratura entre os sinais
de saída, o que possibilitou a obtenção destes sinais no sistema de coordenadas estacionário
α-β , que podem ser facilmente convertidos para o plano de coordenadas síncrono d-q.
A Figura 12 traz o diagrama de blocos de um filtro SOGI−QSG.
- ɛv
v
+
k
kɛv
+ qvʹ
ʃ
X
vʹ
SOGI
ʃ
X
ωʹ
Figura 12 - Filtro baseado em um integrador generalizado de segunda ordem.
A configuração utilizada neste trabalho, foi proposta por Rodriguez et al. (2006a). O
DSOGI-QSG foi desenvolvido para a decomposição de um sinal medido e referenciado ao
4 DESEQUILÍBRIO DE TENSÃO
38
plano de coordenadas estacionário α-β . Além disso, o FLL é utilizado para detectar a frequência da componente fundamental do sinal de entrada, que é utilizada como frequência central de
ressonância da curva de ganho do DSOGI-QSG.
A largura da faixa de passagem do filtro é determinada pela variável k. As saídas do filtro
consistem em dois pares componentes em quadratura, v’α , qv’α e v’β , qv’β . A partir da manipulação das componentes em quadratura, o bloco de cálculo dos vetores de sequência negativa e
positiva (PNSC) obtêm o sinal de entrada vαβ decomposto em seus componentes de sequência
positiva e negativa.
O diagrama de blocos do DSOGI−QSG associado a um FLL é apresentado na Figura 13.
+ʹ
α
v
+
- ɛv(α)
vα
+
k
kɛv(α)
+ -
[Tαβ]
vαβ
1/2
+ʹ
αβ
v
ʃ
X
vabc
vʹα
ʃ
X
- ɛv(β)
k
+
v
-
dq
+ʹ
β
+
ωʹ
ɛv(α)
+
v
v
+
SOGI-QSG(α)
vβ
[Tdq]
qvʹα
kɛv(β)
+ -
vʹβ
ʃ
X
1/2
1/2
+ v-ʹα
ʃ
X
-
SOGI-QSG(β)
-ʹ
v αβ
ωʹ
ɛv(β)
qvʹβ
[Tdq]
dq
1/2
+
DSOGI-QSG(αβ)
-ʹ
vβ
+
PNSC
ɛv(α)
kωʹ
+ʹ 2
+ʹ 2
(v α) + (v β)
X
qvʹα
ωff
+
+
ɛv(β)
-Г
X
ʃ
-
ωʹ
+
X
qvʹβ
FLL
Figura 13 - Diagrama de blocos do DSOGI−QSG.
Utilizando-se múltiplos filtros DSOGI-QSG, associados à um Fll, configurados para diferentes frequências de ressonância, múltiplas da fundamental, pode-se obter a decomposição do
sinal original em seus componentes fundamental, fundamental de sequência negativa e suas
diversas harmônicas. Este sistema é denominado integrador multiressonante generalizado de
segunda ordem gerador de sinais em quadratura (do inglês: Multiresonant Second Order Generalized Integrator−Quadrature Signal Generator - MSOGI−QSG) (RODRIGUEZ et al., 2011).
4.2 CONTROLES DO DFIG SOB TENSÕES DESEQUILIBRADAS
39
Este método de decomposição de vetores pode ser utilizado para variáveis como tensões,
correntes e fluxos.
4.2
CONTROLES DO DFIG SOB TENSÕES DESEQUILIBRADAS
Diversas abordagens de controle já foram propostas para o DFIG operando sob tensões desequilibradas. Os objetivos focam tanto em reduzir a influência do desequilíbrio na operação da
máquina, quanto compensar a tensão de sequência negativa no PCC. As estratégias podem ser
implementadas junto ao RSC, quando há apenas o intuito de compensar os parâmetros de operação da máquina, ou possuir uma abordagem combinada entre os dois conversores, onde o GSC
possui funções de compensação, podendo compensar uma eventual componente de corrente de
sequência negativa fluindo do estator da máquina, ou até mesmo efetuar a injeção proposital de
correntes desequilibradas visando compensar o desequilíbrio de tensão junto ao PCC.
As estratégias de controle para o RSC visam atenuar as influências do desequilíbrio de
tensão sobre os parâmetros de operação da máquina. A eliminação das oscilações no torque
eletromagnético é o objetivo mais citado, já que estas oscilações impõem vibrações e esforços
mecânicos que reduzem a vida útil da máquina por fadiga estrutural. Estratégias de controle
junto RSC para a eliminação das oscilações no torque eletromagnético são formalizadas em
Brekken e Mohan (2003, 2007).
Outro objetivo proposto é a eliminação das oscilações na potência ativa da máquina, como
pode ser observado em Wang e Xu (2007). Além destes objetivos, a eliminação do desequilíbrio
na corrente do estator da máquina, evitando assim que o gerador contribua para a degradação
do perfil de desequilíbrio da rede elétrica, e a eliminação de componentes de sequência negativa na corrente do rotor, evitando efeitos de aquecimento nos enrolamentos, são controles já
implementados junto ao RSC.
Controles com foco nos 4 objetivos previamente citados são implementados em Xu e Wang
(2007), e pode-se observar as influências negativas ou positivas que o controle de cada um destes
parâmetros têm sobre as variáveis não controladas. Em Xu et al. (2012), Xu, Hu e He (2012)
estes controles são estendidos também para atenuar os efeitos das harmônicas de ordem 5 e 7,
que são as harmônicas mais presentes nos pontos de conexão de parques eólicos com turbinas
configuradas com DFIG (BADRZADEH; GUPTA, 2012; LIANG; HU; LEE, 2012).
As estratégias de controle do GSC são utilizadas de forma combinada com as estratégias
propostas para o RSC, para que se obtenha não só a operação adequada da máquina, mas também a redução de sua influência sobre o perfil de desequilíbrio de tensão da rede. Nos controles
combinados propostos, o RSC têm a função de reduzir as oscilações no torque eletromagnético
da máquina e o GSC pode compensar as oscilações na potência ativa total do DFIG (XU, 2008;
HU et al., 2009; HU; XU; HE, 2013) ou equilibrar a sua corrente de saída (QIAO; HARLEY,
4 DESEQUILÍBRIO DE TENSÃO
40
2008).
Estratégias para a compensação do desequilíbrio de tensão no PCC também podem ser
implementadas junto a ambos os conversores do DFIG. As estratégias de compensação do desequilíbrio de tensão se baseiam na injeção de correntes de sequência negativa pelo estator da
máquina, quando o controle é feito através do RSC, ou diretamente pelo GSC.
Estas correntes se relacionam com a impedância da rede de forma a cancelar a componente
de sequência negativa de tensão no PCC. Porém, em Wang, Xu e Williams (2009) é demonstrado que o controle feito pelo RSC promove grandes oscilações no torque eletromagnético da
máquina, tendo sua aplicação bastante restrita.
O uso de uma estratégia combinada é apontada como a melhor solução, onde o RSC controla eventuais oscilações no torque eletromagnético, devido ao não cancelamento total da componente de tensão de sequência negativa, e o GSC injeta correntes de sequência negativa na
rede, de acordo com sua impedância, para anular o desequilíbro de tensão no PCC. A limitação
da injeção de corrente de sequência negativa pelo GSC está na disponibilidade de potência do
conversor, que varia de acordo com o escorregamento da máquina. Este método também pode
ser visualizado em Fan, Yin e Kavasseri (2009).
4.2.1
Obtenção das referências de controle dos conversores
Nesta subseção serão desenvolvidas as equações para a obtenção das correntes de referência para o RSC nos diferentes objetivos citados. Para o GSC será apresentado o controle de
compensação de desequilíbrio de tensão no PCC. Na ultima sessão deste capítulo serão apresentados por modelagem computacional os resultados obtidos para os controles do RSC e para
o controle combinado entre o RSC e GSC.
4.2.1.1
RSC
O controle do RSC se baseia na obtenção das correntes rotóricas de sequência negativa
para cada objetivo estipulado, sendo que o desenvolvimento das referências para cada objetivo
é encontrado em Xu e Wang (2007) . Primeiramente é apresentada a corrente de referência para
anular as correntes de sequência negativa no rotor da máquina, de forma a evitar aquecimento
nos enrolamentos. A obtenção das referências para este objetivo é direta, bastando igualar as
referências de corrente de sequência negativa do rotor a zero:
(
−∗
Ird−
=0
(51)
−∗
Irq− = 0
O segundo objetivo é anular as correntes de sequência negativa no estator da máquina,
4.2 CONTROLES DO DFIG SOB TENSÕES DESEQUILIBRADAS
41
para isto deve-se reescrever (12) em termos das componentes de sequência negativa da seguinte
forma:
(
−
−
−
ψsd−
= Ls Isd−
+ Lm Ird−
(52)
−
−
−
ψsq−
= Ls Isq−
+ Lm Irq−
agora, isolando-se a corrente de sequência negativa do rotor e igualando-se a corrente de sequência negativa do estator a zero, tem-se:
(
−
−
Ird−
= ψsd−
Lm
(53)
−
−
Irq− = ψsq− Lm
por (41), pode-se afirmar que:
(
−
−
ψsd−
= −Usq−
ω1
−
−
ψsq− = Usd− ω1
(54)
substituindo-se, (54) em (53), chega-se a:
(
−
−
Ird−
= −Usq−
(ω1 Lm )
−
−
Irq−
= Usd−
(ω1 Lm )
(55)
O terceiro objetivo consiste em anular as oscilações de potência ativa no estator da máquina. Para isto, iguala-se Ps,sen2 e Ps,cos2 a zero em (46). Isolando-se as correntes de sequência
negativa do rotor, obtêm-se:
−
−
Usq−
−2U −
Usd−
−
+
+
Ird−
I
−
−
= Lm ωsq−
+
+ Irq+
rd+
Usd+
Usd+
1
(56)
−
−
Usq−
Usd−
2U −
−
+
+
Irq−
+
I
I
−
= Lmsd−
ω1
U + rd+
U + rq+
sd+
sd+
Reduzir as oscilações no torque eletromagnético da máquina é o quarto objetivo apresentado. Para isto deve se igualar Pe,sen2 e Pe,cos2 a zero em (50). Novamente, isolando-se as
correntes de sequência negativa do rotor, chega-se a:
−
Usq−
U− +
−
+
Ird−
= Usd−
+ Ird+ + + Irq+
U
sd+
sd+
(57)
−
−
Usq−
Usd−
−
+
+
Irq−
= U + Ird+ − U + Irq+
sd+
4.2.1.2
sd+
GSC
O objetivo do controle do GSC é compensar o desequilíbrio de tensão no PCC através da
injeção de corrente de sequência negativa na rede. A referência para a injeção de corrente
de sequência negativa depende das características da rede na qual a turbina está acoplada, e
pode ser estabelecida por meio da análise do circuito equivalente simplificado de uma linha de
transmissão referenciado ao plano de referencia síncrono de sequência negativa (dq)- (WANG;
XU; WILLIAMS, 2009). Este circuito é ilustrado na Figura 14.
4 DESEQUILÍBRIO DE TENSÃO
42
PCC
RL -jω1LLI pccdq- LL
+
+
+
-
I pccdq-
U
U -fontedq-
pccdq-
-
Figura 14 - Circuito equivalente simplificado de uma linha de transmissão.
Onde, U - fontedq- é a tensão de sequência negativa equivalente do sistema, RL e LL são a
resistência e a indutância equivalente da rede, e U - pccdq- e I - pccdq- são a tensão e a corrente de
sequência negativa no PCC, respectivamente.
De acordo com o circuito equivalente apresentado na Figura 14, pode-se determinar a tensão
no PCC, onde:
.
−
−
−
−
−
U pccdq− = U f ontedq− + RL I pccdq− − jω1 LL I pccdq− + LL dI pccdq− dt
(58)
Representando-se (58) sob regime permanente e ignorando-se a queda de tensão em RL , tem-se:
(
−
−
U pccd−
= U f−onted− + ω1 LL I pccq−
(59)
−
−
U pccq−
= U f−onteq− − ω1 LL I pccd−
Então, igualando-se U - pccdq- a zero e isolando-se I - pccdq- em (59), pode-se obter a referência
para a corrente de sequência negativa no PCC, logo:
.
−
I−
=
U
ω1 LL
f onteq− .
pccd−
(60)
−
I−
pccq− = −U f onted− ω1 LL
Utilizando-se as correntes de referência apresentadas em 60 para a injeção de corrente de
sequência negativa pelo DFIG, deve-se obter a anulação do desequilíbrio de tensão neste ponto
da rede.
4.2.2
Modelagem, simulação e apresentação dos resultados
A modelagem e simulações foram conduzidas em ambiente Matlab/Simulink. O sistema
de testes é composto por um parque eólico com 5 turbinas DFIG de 2MVA conectadas ao PCC
por transformadores individuais Y-∆ de 2.5MVA. Uma carga balanceada de 8MW também é
conectada ao PCC.
Uma linha de transmissão do tipo π de 50 km conecta o PCC ao sistema de 120 kV, o qual
43
4.2 CONTROLES DO DFIG SOB TENSÕES DESEQUILIBRADAS
é composto por um transformador, uma impedância mútua e uma fonte de tensão controlada.
Além disso, um transformador de aterramento é conectado a sessão da rede de 25kV para evitar
correntes de sequência zero.
O sistema completo é ilustrado na Figura 15 e os parâmetros do gerador de indução e dos
conversores são dados na Tabela 1.
Transformador
Y/Δ
Transformador
Δ/Y
Acoplamento
Mecânico
PCC
DFIG
us
Rotor/Estator
Y/Y
upcc
Linha-π
π
50 km
575V/25kV
2.5MVA
25kV/120kV
47MVA
Carga
8MW
RSC
GSC
Indutância
Mútua
2500 MVA
X0/X1=3
Transformador
de Aterramento
Parque Eólico
5 x 2MVA DFIG
Figura 15 - Sistema implementado - DFIG.
Tabela 1 - Dados utilizados para a modelagem do Gerador
de indução duplamente alimentado - Capítulo 4
Parâmetros do DFIG
Potência Nominal
2 MVA
Tensão Nominal/ Frequência 575 V/60 Hz
Rs
0.023 Ω
Gerador de Indução Rr
0.016 Ω
Lls
0.18 H
Llr
0.16 H
Constante de Inércia
0.685 s
Pares de Pólos
3
GSC
Lg
Link DC
Cdc
0.00273 H
0.03 F
Os dados da linha de transmissão do tipo π de 50 km são dados na Tabela 2.
Fonte de Tensão
Controlada
120kV
4 DESEQUILÍBRIO DE TENSÃO
44
Tabela 2 - Dados da rede de transmissão do tipo π
Parâmetros da rede
Resistência
Sequência Positiva
Sequência Negativa
Sequência Zero
0.1153 Ω/km
0.1153 Ω/km
0.413 Ω/km
Indutância
Sequência Positiva
Sequência Negativa
Sequência Zero
1.05 e−3 H/km
1.05 e−3 H/km
3.32 e−3 H/km
Sequência Positiva 11.33 e−9 F/Km
Capacitância Sequência Negativa 11.33 e−9 F/Km
Sequência Zero
5.01 e−9 F/Km
4.2.2.1
Simulação e análise dos controles do RSC
A primeira etapa de simulações objetiva demonstrar as influências na operação da máquina
dos diferentes controles citados para o RSC. Desta forma, para que a variação das correntes
dos estatores das máquinas não altere significativamente o desequilíbrio de tensão no PCC, o
que poderia implicar em alterações significativas nos resultados, apenas uma turbina do parque
modelado é utilizada.
A velocidade do vento utilizada é de 12,5 m/s. O desequilíbrio de tensão induzido na fonte
controlada possui VUF de 15%. Este valor elevado de desequilíbrio ajuda na visualização dos
resultados obtidos quando aplicada cada estratégia de controle e pode ser implementado pois,
neste caso, os controles tem apenas a função de ajustar os parâmetros de operação da máquina
e não de compensar o desequilíbrio de tensão no PCC, o que demandaria maior uso de potência
pelo conversor. Em uma situação real tal nível de desequilíbrio de tensão implicaria na atuação
das proteções e na desconexão da turbina.
Os resultados são apresentados em 6 diferentes períodos, cada um focando em uma estratégia de controle.
• 0 - 2s: DFIG operando sob tensão equilibrada.
• 2 - 4s: Um desequilíbrio com VUF de 15% é implementado na fonte de tensão controlada.
• 4 - 6s: RSC: Compensar as oscilações na potência ativa do estator, conforme a eq. 56.
• 6 - 8s: RSC: Compensar as correntes de seq. negativa no rotor, conforme a eq. 51.
• 8 - 10s: RSC: Compensar as correntes de seq. negativa no estator, conforme a eq. 55.
• 10 - 12s: RSC: Compensar as oscilações no torque eletromagnético, conforme a eq. 57.
Vale ressaltar que todos os resultados se apresentam em p.u., com o sistema por unidade
referenciado ao gerador.
45
4.2 CONTROLES DO DFIG SOB TENSÕES DESEQUILIBRADAS
A Figura 16 traz o resultado obtido para a tensão no estator da máquina.
Tensão do estator S.N.
(p.u.)
Tensão do estator S.P.
(p.u.)
1.1
0.9
0.7
d
q
0.5
0.3
0.1
−0.1
0
2
4
6
8
10
0.05
−0.05
−0.1
−0.15
0
12
d
q
0
2
4
Tempo (s)
6
8
10
12
Tempo (s)
(a) Sequência Positiva
(b) Sequência negativa
Figura 16 - Controles do RSC - Tensão no estator.
O eixo d do plano de referência (dq)+ está alinhado com a fase a da tensão do estator. Logo,
a componente q tem valor nulo, como pode-se observar na Subfigura 16a.
Os controles de sequência negativa do rotor influenciam ligeiramente e indiretamente o
desequilíbrio de tensão no estator, pois alteram a corrente de sequência negativa que flui pelo
estator da máquina, como pode-se observar na Subfigura 16b.
Corrente do estator S.N.
(p.u.)
Corrente do estator S.P.
(p.u.)
A corrente no estator da máquina é ilustrada na Figura 17.
0
−0.2
d
q
−0.4
−0.6
−0.8
0
2
4
6
8
10
12
0.1
0.05
d
q
0
−0.05
−0.1
0
2
4
Tempo (s)
(a) Sequência Positiva
6
8
10
12
Tempo (s)
(b) Sequência negativa
Figura 17 - Controles do RSC - Corrente no estator.
Nota-se na Subfigura 17a que a influência dos controles de sequência negativa na corrente
de sequência positiva do estator é mínima. Desta forma, a potência da máquina é preservada.
Na Subfigura 17b a variação da componente de sequência negativa é ilustrada e, como
pode-se observar, ela apresenta uma grande variação de acordo com o objetivo de controle
implementado.
A variação da componente de sequência negativa da corrente do estator, de acordo com o
controle implementado, justifica a utilização de apenas uma turbina nesta etapa de simulações.
Um maior número de geradores implicaria na alteração do desequilíbrio de tensão no PCC,
e consequentemente no estator da máquina, durante a aplicação das diferentes estratégias de
controle, e impossibilitaria que todos os controles fossem implementados sob a mesma condição
de tensão.
No período entre 8 e 10s, pode-se observar que o objetivo de controle de reduzir o desequilíbrio de corrente no estator da máquina é atingido.
4 DESEQUILÍBRIO DE TENSÃO
46
A Figura 18 apresenta a corrente no rotor da máquina.
0.15
Corrente do rotor S.N.
(p.u.)
Corrente do rotor S.P.
(p.u.)
0.9
0.7
0.5
0.3
d
q
0.1
−0.1
−0.3
−0.5
0
2
4
6
8
10
0.1
0
−0.05
−0.1
−0.15
0
12
d
q
0.05
2
4
Tempo (s)
6
8
10
12
Tempo (s)
(a) Sequência Positiva
(b) Sequência negativa
Figura 18 - Controles do RSC - Corrente no rotor.
Como pode-se perceber na Subfigura 18a, a corrente de sequência positiva no rotor da
máquina também sofre alterações desprezíveis nos diferentes controles implementados.
A componente de sequência negativa varia de acordo com as referências calculadas através
das equações para cada objetivo estabelecido.
Como pode-se notar na Subfigura 18b, entre 6 e 8s, visualiza-se a eliminação do desequilíbrio de corrente no rotor da máquina, de acordo com o objetivo de controle implementado para
este período.
A corrente do GSC é ilustrada na Figura 19.
0.1
0.08
0.06
d
q
0.04
0.02
0
−0.02
0
2
4
6
8
10
12
Corrente do GSC S.N.
(p.u.)
Corrente do GSC S.P.
(p.u.)
0.12
0.12
0.08
d
q
0.04
0
−0.04
−0.08
0
2
4
Tempo (s)
(a) Sequência Positiva
6
8
10
12
Tempo (s)
(b) Sequência negativa
Figura 19 - Controles do RSC - Corrente do GSC.
A corrente de sequência positiva do GSC é determinada de acordo com a necessidade de
potência do controle de escorregamento da máquina, feito pelo RSC. Porém, controles adicionais também podem requerer que potência adicional seja extraída, o que promove variações
menores de corrente, como pode ser observado na Subfigura 19a.
A componente de sequência negativa é influenciada principalmente pelas oscilações de
frequência 2ω 1 na tensão do link DC, que variam de acordo com o controle de sequência
negativa implementado. Porém, o desequilíbrio de tensão na rede também influencia no desequilíbrio de corrente do GSC, como pode ser observado na Subfigura 19b.
O torque eletromagnético, a velocidade angular do rotor e a tensão no Link DC são apresentados na Figura 20.
47
Velocidade do Rotor (p.u.)
Torque Eletromagnético
(p.u.)
4.2 CONTROLES DO DFIG SOB TENSÕES DESEQUILIBRADAS
−0.4
−0.5
−0.6
−0.7
−0.8
0
2
4
6
8
10
12
1
0.95
0.9
0.85
0.8
0
2
4
(a) Torque Eletromagnético
6
8
10
12
Tempo(s)
Tempo (s)
(b) Velocidade Angular do rotor
Tensão no Link DC
(p.u.)
1.05
1
0.95
0
2
4
6
8
10
12
Tempo (s)
(c) Tensão no Link DC
Figura 20 - Controles do RSC - Variáveis do ponto de operação da máquina.
As oscilações do torque eletromagnético variam de acordo com a corrente de sequência
negativa que flui no rotor da máquina. Logo, o objetivo de controle para o RSC é determinante
nas vibrações que a máquina apresenta.
Pode-se verificar na Subfigura 20a, no período entre 4 e 6s, que reduzir as oscilações na
potência ativa implicou em um aumento das oscilações de torque na máquina. Já, entre 10
e 12s, visualiza-se a redução nestas oscilações, de acordo com o objetivo proposto para este
período.
A velocidade angular do rotor é de 0.8 p.u. durante toda a simulação, como se observa na
Subfigura 20b.
A tensão no Link DC e suas oscilações, de acordo com o controle implementado, é apresentada na Subfigura 20c. Observa-se que controlar as oscilações de potência ativa e as oscilações
de torque impõe maiores oscilações à tensão do Link DC.
0.8
0.7
PS
PSdc
0.6
0.5
0.4
0
2
4
6
8
10
12
Potência Reativado Estator
(p.u.)
Potência Ativa do Estator
(p.u.)
A Figura 21 ilustra as potências ativa e reativa no estator da máquina.
0.2
0.1
QS
QSdc
0
−0.1
−0.2
0
2
Tempo (s)
(a) Potência Ativa
4
6
8
10
12
Tempo (s)
(b) Potência Reativa
Figura 21 - Controles do RSC - Potências ativa e reativa do estator.
Verifica-se na Subfigura 21a, que as oscilações da potência ativa da máquina são inversa-
4 DESEQUILÍBRIO DE TENSÃO
48
mente proporcionais às oscilações do torque eletromagnético. Sendo assim, reduzir as oscilações no torque significa aumentar as oscilações na potência ativa e vice versa.
Na Subfigura 21b, observa-se que as oscilações da potência reativa do estator são proporcionais às oscilações do torque. Logo, controlar as oscilações no torque é análogo a controlar as
oscilações na potência reativa.
Em vermelho, tem-se as componentes contínuas das potências da máquina, onde é possível
perceber uma maior sensibilidade da potência ativa aos controles propostos, sendo que esta
apresenta uma ligeira variação de acordo com a estratégia implementada.
0.1
0
Potência Reativa do GSC
(p.u.)
Potência Ativa do GSC
(p.u.)
As potências ativa e reativa do GSC são apresentadas na Figura 22.
PGSC
PGSCdc
−0.1
−0.2
0
2
4
6
8
10
12
Tempo(s)
0.2
0.1
QGSC
QGSCdc
0
−0.1
−0.2
0
2
4
6
8
10
12
Tempo (s)
(a) Potência Ativa
(b) Potência Reativa
Figura 22 - Controles do RSC - Potências ativa e reativa do GSC.
Como nenhum controle de sequência negativa foi implementado junto ao GSC para esta
simulação, as oscilações das potências ativa e reativa do GSC dependem fundamentalmente das
oscilações da tensão no link DC do conversor back-to-back. Pode-se verificar esta dependência
comparando-se a Subfigura 20c à Figura 22.
0.7
0.6
PDFIG
PDFIGdc
0.5
0.4
0.3
0
2
4
6
8
10
12
Potência Reativa Total DFIG
(p.u.)
Potência Ativa Total DFIG
(p.u.)
A Figura 23 apresenta as potências ativa e reativa totais do DFIG.
0.2
0.1
QDFIG
QDFIGdc
0
−0.1
−0.2
0
2
Tempo (s)
(a) Potência Ativa
4
6
8
10
12
Tempo (s)
(b) Potência Reativa
Figura 23 - Controles do RSC - Potências ativa e reativa totais do DFIG.
As potências ativa e reativa totais do DFIG consistem na soma das potências do estator
e do GSC. Nota-se, por meio da Figura 23, que as variações nas componentes contínuas das
potências ativa da máquina e do conversor se anulam, sendo entregue à rede uma potência
constante.
49
4.2 CONTROLES DO DFIG SOB TENSÕES DESEQUILIBRADAS
4.2.2.2
Simulação e análise do controle coordenado para o RSC e GSC
A segunda etapa de simulações objetiva demonstrar uma estratégia combinada de controle
utilizando-se ambos os conversores. Nela, o GSC insere componentes de sequência negativa de
corrente para eliminar o desequilíbrio de tensão no PCC. Já o RSC, reduz eventuais oscilações
no torque eletromagnético da máquina, caso o cancelamento do desequilíbrio de tensão no PCC
não seja total.
Os resultados são apresentados divididos em 4 períodos de ativação dos controles:
• 0 - 2s: DFIG operando sob tensão equilibrada.
• 2 - 4s: Um VUF de 6% é implementado junto à fonte de tensão controlada.
• 4 - 6s: RSC: Reduzir as oscilações no torque eletromagnético.
• 6 - 8s: RSC: Reduzir as oscilações no torque eletromagnético.
GSC: Compensar o desequilíbrio de tensão no PCC.
Nesta etapa, as cinco turbinas são utilizadas, de forma a maximizar a corrente de sequência
negativa injetada no PCC. O desequilíbrio de tensão é reduzido para um VUF de 6%, pois
acima deste valor a potência máxima do conversor, estipulada em 30% do valor nominal da
máquina, quando consideradas as oscilações, não seria suficiente para a compensação total do
desequilíbrio.
A Figura 24 apresenta as tensões no PCC e no estator da máquina.
0.1
0.9
0.7
0.5
0.3
d
q
0.1
−0.1
0
2
4
6
Tensão no PCC S.N.
(p.u.)
Tensão no PCC S.P.
(p.u.)
1.1
0
−0.05
0
8
d
q
0.05
2
Tempo (s)
Tensão do estator S.P.
(p.u.)
1.1
0.9
0.7
d
q
0.5
0.3
0.1
2
4
8
6
8
0.1
d
q
0.05
0
−0.05
0
Tempo (s)
(c) Estator - Sequência Positiva
6
(b) PCC - Sequência negativa
Tensão do estator S.N.
(p.u.)
(a) PCC - Sequência Positiva
−0.1
0
4
Tempo (s)
2
4
6
8
Tempo (s)
(d) Estator - Sequência negativa
Figura 24 - Controle coordenado - Tensões no PCC e no estator.
Devido à presença dos transformadores Y-∆, que elevam a tensão de saída dos geradores de
575V para 25kV, existe uma diferença de fase entre a tensão no PCC e a tensão do estator da
4 DESEQUILÍBRIO DE TENSÃO
50
máquina, como pode-se observar comparando-se as Subfiguras 24a e 24c. Nota-se, também, o
alinhamento do plano de referência d-q à tensão do estator.
Analisando-se as componentes de sequência negativa das tensões, apresentadas nas Subfiguras 24b e 24d, observa-se a ausência de desequilíbrio no primeiro período. Já no segundo
período, com a inserção de um desequilíbrio com VUF de 6% na fonte de tensão controlada,
este desequilíbrio propaga-se para o PCC e para o estator da máquina.
Ainda, observando-se as componentes de sequência negativa das tensões, apresentadas nas
Subfiguras 24b e 24d, no terceiro período onde os controles de sequência negativa são ativados,
a variação da corrente de sequência negativa no estator da máquina, devido ao controle de redução de oscilações de torque do RSC, faz com que ocorra uma ligeira mudança nos desequilíbrios
de tensão tanto no PCC quanto no estator. O quarto período ilustra a efetividade do controle
de compensação do desequilíbrio de tensão no PCC através da inserção de componentes de
sequência negativa de corrente pelo GSC. Neste período, pode-se dizer que o desequilíbrio foi
praticamente anulado.
0
−0.2
d
q
−0.4
−0.6
−0.8
0
2
4
6
Corrente do estator S.N.
(p.u.)
Corrente do estator S.P.
(p.u.)
Na Figura 25 é apresentada a corrente do estator da máquina de indução.
8
0.04
d
q
0.02
0
−0.02
−0.04
0
2
Tempo (s)
(a) Sequência Positiva
4
6
8
Tempo (s)
(b) Sequência negativa
Figura 25 - Controle coordenado - Corrente no estator.
O ponto de operação da turbina é o mesmo utilizado para a primeira etapa de simulações,
logo, sua corrente de sequência positiva se mantém. Além disso, os controles de sequência
negativa não influenciam a componente fundamental de corrente, como pode ser observado na
Figura 25.
A componente de sequência negativa varia de acordo com o período analisado. No primeiro
período, não há desequilíbrio de tensão na rede, logo a corrente do estator também é equilibrada.
Já no segundo, a inserção do desequilíbrio de tensão junto a fonte controlada, e a propagação
da componente de sequência negativa de tensão até o estator da máquina, gera também um
desequilíbrio de corrente. No terceiro período, a ativação do controle de compensação das
oscilações de torque alteram a fase e a magnitude da componente de sequência negativa de
corrente. E finalmente, no quarto período, a compensação do desequilíbrio de tensão no PCC
faz com que o desequilíbrio de corrente no estator da máquina seja também anulado.
A Figura 26 ilustra a corrente no rotor da máquina.
51
4.2 CONTROLES DO DFIG SOB TENSÕES DESEQUILIBRADAS
0.05
Corrente do rotor S.N.
(p.u.)
Corrente do rotor S.P.
(p.u.)
0.9
0.7
0.5
0.3
d
q
0.1
−0.1
−0.3
−0.5
0
2
4
6
d
q
0
−0.05
0
8
2
Tempo (s)
4
6
8
Tempo (s)
(a) Sequência Positiva
(b) Sequência negativa
Figura 26 - Controle coordenado - Corrente no rotor.
Pode-se observar na Subfigura 26b a transição entre os controles do RSC e do GSC. No
terceiro período, o controle de redução de oscilações de torque do RSC altera o valor da corrente
de sequência negativa no rotor da máquina para alcançar seu objetivo. Já no quarto período, com
a anulação do desequilíbrio de tensão no PCC, e consequentemente no estator da máquina, pelo
controle de compensação do GSC, o controle de oscilações de torque não é mais necessário e a
corrente de sequência negativa do rotor se torna nula.
Caso o controle de compensação do GSC não possa anular totalmente o desequilíbrio de
tensão no PCC, o controle do RSC atuará conjuntamente para que não haja oscilações no torque
eletromagnético da máquina.
A corrente no GSC é apresentada na Figura 27.
0.2
0.06
d
q
0.04
0.02
0
−0.02
0
2
4
6
Corrente do GSC S.N.
(p.u.)
Corrente do GSC S.P.
(p.u.)
0.08
0.1
−0.1
−0.2
0
8
d
q
0
2
Tempo (s)
(a) Sequência Positiva
4
6
8
Tempo (s)
(b) Sequência negativa
Figura 27 - Controle coordenado - Corrente do GSC.
A corrente de sequência positiva do GSC é determinada principalmente pela troca de potência através do rotor do DFIG para o controle de seu escorregamento. Porém, controles
adicionados às funções básicas de controle de velocidade também podem requerer a troca de
potência por este conversor.
Na Subfigura 27a, pode-se observar que o valor da componente de sequência positiva é
quase constante, devido à máquina operar em regime permanente, apresentando apenas uma
pequena variação no terceiro período quando o controle de oscilações de torque pelo RSC está
induzindo correntes de sequência negativa no rotor.
A corrente de sequência negativa do GSC pode ser induzida pela presença do desequilíbrio de tensão na rede, como visto no segundo período da Subfigura 27b. Porém, ela ocorre
4 DESEQUILÍBRIO DE TENSÃO
52
principalmente devido à presença de oscilações de frequência 2ω 1 na tensão do link DC, que
é exatamente o motivo da presença de desequilíbrio de corrente no GSC no terceiro período,
onde, devido ao controle de oscilações de torque do RSC, a tensão no barramento DC apresenta
tais oscilações. Já no quarto período, nota-se a corrente de sequência negativa propositalmente
induzida neste conversor para que ocorra a compensação o desequilíbrio de tensão no PCC.
Velocidade do Rotor (p.u.)
Torque Eletromagnético
(p.u.)
O torque eletromagnético, a velocidade angular do rotor e a tensão no Link DC são apresentados na Figura 28.
−0.45
−0.5
−0.55
−0.6
−0.65
−0.7
0
2
4
6
8
Tempo (s)
(a) Torque Eletromagnético
1
0.95
0.9
0.85
0.8
0
2
4
6
8
Tempo(s)
(b) Velocidade Angular do rotor
Tensão no Link DC
(p.u.)
1.02
1.01
1
0.99
0.98
0
1
2
3
4
5
6
7
8
Tempo (s)
(c) Tensão no Link DC
Figura 28 - Controle coordenado - Variáveis do ponto de operação da máquina.
Primeiramente, na Subfigura 28a, no segundo período, observa-se as oscilações de torque
devido à presença do desequilíbrio de tensão. No terceiro período, a redução destas oscilações
devido ao controle feito pelo RSC pode ser notada. No quarto período, as oscilações são reduzidas devido a compensação do desequilíbrio de tensão pelo GSC. Pode-se dizer que ambos os
métodos de controle foram igualmente eficazes neste quesito.
Na Subfigura 28b, a velocidade angular da máquina é apresentada e, como o ponto de
operação da turbina não foi alterado, ela continua igual à obtida na simulação anterior, com
valor próximo à 0.9 p.u..
As oscilações na tensão do link DC são ilustradas na Subfigura 28c, onde pode-se notar
os efeitos dos controles de sequência negativa sobre este parâmetro. Observa-se que ambos os
métodos de controle implementados implicaram em níveis equivalentes de oscilações.
A figura 29 ilustra as potências ativa e reativa do estator do gerador. Onde, observa-se
que as oscilações da potência ativa sofrem variações de acordo com o método de controle de
sequência negativa empregado. Já a potência reativa tem suas oscilações reduzidas pela redução
das oscilações no torque eletromagnético, seja devido ao controle de oscilações de torque do
53
4.2 CONTROLES DO DFIG SOB TENSÕES DESEQUILIBRADAS
0.7
0.65
PS
PSdc
0.6
0.55
0.5
0.45
0
1
2
3
4
5
6
7
8
Potência Reativado Estator
(p.u.)
Potência Ativa do Estator
(p.u.)
RSC ou à compensação do desequilíbrio de tensão pelo GSC.
0.1
0.05
QS
QSdc
0
−0.05
−0.1
0
1
2
3
Tempo (s)
4
5
6
7
8
Tempo (s)
(a) Potência Ativa
(b) Potência Reativa
Figura 29 - Controle coordenado - Potências ativa e reativa do estator.
Observa-se na Figura 29, no segundo período, as oscilações naturais nas potências ativa
e reativa promovidas pela tensão desequilibrada. No terceiro período, observa-se novamente
que reduzir as oscilações no torque eletromagnético também reduz as oscilações da potência
reativa. Entretanto, reduzir as oscilações de torque através do controle proposto para o RSC
promove um aumento nas oscilações na potência ativa. Neste quesito, a compensação de desequilíbrio de tensão pelo GSC se mostra superior, pois, como não existe desequilíbrio de tensão
e corrente no estator da máquina, as potências não apresentam oscilações, assim como o torque
eletromagnético, como pode ser observado no quarto período.
0.1
Potência Reativa do GSC
(p.u.)
Potência Ativa do GSC
(p.u.)
As potências ativa e reativa do GSC são apresentadas na Figura 30.
PGSC
PGSCdc
0
−0.1
−0.2
−0.3
0
2
4
Tempo(s)
(a) Potência Ativa
6
8
0.2
0.1
QGSC
QGSCdc
0
−0.1
−0.2
0
1
2
3
4
5
6
7
8
Tempo (s)
(b) Potência Reativa
Figura 30 - Controle coordenado - Potências ativa e reativa do GSC.
A Figura 30 traz as potências ativa e reativa do GSC. Nota-se, no terceiro período, o incremento nas oscilações devido a componente de frequência 2ω 1 presente na tensão do link
DC, que ocorre pela atuação do controle implementado junto ao RSC. No quarto período, as
oscilações de potência se devem à corrente de sequência negativa injetada pelo GSC para a
compensação da tensão no PCC.
A Figura 31 ilustra as potências totais ativa e reativa do DFIG, que consistem na soma das
potências exportadas pelo estator do gerador e pelo GSC.
4 DESEQUILÍBRIO DE TENSÃO
0.7
0.6
PDFIG
PDFIGdc
0.5
0.4
0.3
0
1
2
3
4
5
6
7
8
Potência Reativa Total DFIG
(p.u.)
Potência Ativa Total DFIG
(p.u.)
54
0.2
0.1
QDFIG
QDFIGdc
0
−0.1
−0.2
0
1
2
3
Tempo (s)
(a) Potência Ativa
4
5
6
7
8
Tempo (s)
(b) Potência Reativa
Figura 31 - Controle coordenado - Potências ativa e reativa totais do DFIG.
A potência ativa total é apresentada na Subfigura 31a, nela nota-se o incremento promovido
pelos controles de sequência negativa, sendo o maior deles promovido pela compensação de
desequilíbrio de tensão no PCC, apresentada no quarto período, o que se mostra lógico devido
à maior corrente de sequência negativa injetada pelo DFIG para este fim.
A potência reativa, ilustrada na Subfigura 31b, apresenta oscilações constantes no segundo
e terceiro períodos, sendo que o controle promovido pelo RSC não influencia na potência reativa
total. Já no quarto período, novamente a injeção de corrente de sequência negativa pelo GSC
promove um aumento nas oscilações.
4.3
CONSIDERAÇÕES
Neste capítulo foi apresentada a decomposição das equações da máquina pelo método das
componentes simétricas, além do DSOGI-QSG para a obtenção dos sinais medidos de sequência positiva e negativa. Foram também discutidos, modelados e simulados os controles já propostos para o DFIG sob desequilíbrios de tensão, onde os resultados obtidos para os controles
implementados junto ao RSC e GSC ilustraram suas aplicações e deram base para a discussão.
Quanto aos controles implementados junto ao RSC algumas considerações, baseadas nos
resultados obtidos, podem ser feitas:
Quando implementada a compensação das oscilações da potência ativa do estator da máquina alguns efeitos indesejados podem ser observados. Esta estratégia de controle promove
uma elevação da componente de sequência negativa nas correntes do rotor e estator da máquina. Além disso, há um aumento nas oscilações do torque eletromagnético, sendo o maior
nível de oscilações observado durante toda a simulação. A potência reativa segue este mesmo
comportamento, sendo todas as observações feitas anteriormente válidas para este parâmetro.
A tensão no barramento DC apresentou um incremento considerável em suas oscilações.
Os resultados obtidos quando implementados os objetivos de compensação das correntes
de sequência negativa do estator e do rotor podem ser analisados conjuntamente. Primeiro,
a compensação da componente de sequência negativa no rotor implica também em uma leve
redução desta componente na corrente do estator, a afirmação oposta também é valida. Segundo,
4.3 CONSIDERAÇÕES
55
as oscilações do torque eletromagnético e das potências ativa e reativa tiveram valores bastante
próximos para as duas estratégias de controle. Terceiro, as oscilações da tensão do barramento
DC se mostraram mais elevadas quando a compensação da componente de sequência negativa
da corrente do rotor é o objetivo implementado.
Durante a compensação das oscilações do torque eletromagnético se observou a elevação
da componente de sequência negativa nas correntes do rotor e estator da máquina, sendo esta,
juntamente com a redução das oscilações da potência ativa, as estratégias de controle onde
foram observados os maiores níveis desta componente de corrente. Também foi observada uma
grande elevação das oscilações na potência ativa do estator, assim como, uma grande redução
nas oscilações na potência reativa. As oscilações da tensão no barramento DC também foram
elevadas e apenas comparáveis às obtidas quando implementada a compensação das oscilações
da potência ativa da máquina.
Quando implementada a estratégia de controle coordenado para o RSC e GSC, as seguintes
considerações podem ser feitas:
Mesmo quando o objetivo é otimizar os parâmetros de operação da máquina, compensar o
desequilíbrio de tensão no PCC é o método mais efetivo, pois é a única forma de se evitar efeitos
colaterais que ocorrem quando aplicada alguma das estratégias de controle do RSC. Neste caso,
as correntes de sequência negativa nos enrolamentos da máquina e oscilações de torque e de
potência são reduzidas conjuntamente.
Os níveis de oscilação de tensão no barramento DC foram semelhantes quando apenas
compensando as oscilações de torque através do RSC ou quando compensando também o desequilíbrio de tensão no PCC.
Quando a compensação do desequilíbrio de tensão no PCC não pode ser feita em sua totalidade pelo GSC, devido à não disponibilidade de potência residual suficiente, o RSC pode
compensar as oscilações de torque, o que é mais citado na literatura, ou aplicar qualquer uma
das outras estratégias de controle apresentadas em um controle coordenado.
56
4 DESEQUILÍBRIO DE TENSÃO
57
5
DFIG COM CONVERSOR SÉRIE ASSOCIADO
O uso de um conversor série, com topologia baseada no restaurador dinâmico de tensão
(do inglês: Dynamic Voltage Restorer - DVR), foi primeiramente apresentado por Kelber e
Schumacher (2001). O intuito inicial era o amortecimento das oscilações no fluxo estatórico
referenciado ao plano de referência síncrono, permitindo assim um melhor controle do DFIG
sob afundamentos de tensão. Inicialmente, o conversor série, denominado conversor série do
lado da rede ( do inglês: Series Grid Side Converter - SGSC), foi proposto de forma a substituir
integralmente o GSC.
Posteriormente, em Flannery e Venkataramanan (2006), estudos mais aprofundados foram
feitos visando comprovar a melhor capacidade do DFIG com conversor série de lidar com desequilíbrios de tensão. Porém, foram observadas algumas deficiências no processamento da
potência devido a variação do fluxo no estator. Desta forma, em Flannery e Venkataramanan
(2007, 2008) foi proposta a utilização conjunta do SGSC com os conversores originais do DFIG,
em um esquema de três conversores, evitando assim que o controle da tensão do link DC fosse
feita pelo SGSC e, consequentemente, eliminando variações na tensão de sequência positiva do
estator da máquina.
Na configuração do conversor série utilizada nesta tese, que também é a configuração mais
abordada na literatura, a conexão é feita utilizando-se um transformador injetor trifásico em
série com os enrolamentos do estator. Esta configuração é denominada SGSC acoplado por
transformador (do inglês: Transformer Interfaced SGSC - TI-SGSC). A Figura 32 ilustra o
diagrama de blocos do TI-SGSC.
Pm
Transformador
Série
usérie
DFIG
Acoplamento
Mecânico
us Pm/ (1-s)
SGSC
Lg
Pm
REDE
Transformador
GSC
RSC
Pm/ (1-s)
Figura 32 - Diagrama de blocos do TI-SGSC.
Um ponto importante a ser observado sobre o TI-SGSC é que durante o transitório que
ocorre quando o controle de compensação de afundamento de tensão é ativado, o fluxo con-
5 ADIÇÃO DO CONVERSOR SÉRIE AO DFIG
58
catenado pode atingir duas vezes o seu valor nominal em regime permanente (PETERSSON,
2005). A solução mais óbvia é redimensionar o transformador injetor, duplicando sua potência
nominal, porém, isto implicaria em um aumento no custo do sistema. Baseado neste problema,
em Fitzer et al. (2002) é desenvolvida uma estratégia de controle para o transitório de ativação
da estrutura DVR, evitando assim a situação de sobrefluxo e também o redimensionamento do
transformador injetor.
O diagrama trifásico do TI-SGSC é apresentado na Figura 33, onde pode-se notar que se
optou por trabalhar com o transformador injetor acoplado em delta, assim como o conversor e a
indutância Lc , e o filtro RC é conectado em estrela. Onde, Is é a corrente do estator da máquina,
√
Usérie é a tensão série do transformador injetor, ILc 3 é a corrente que flui pela indutância Lc
para o conversor, ULc é a tensão de fase inserida pelo conversor e IRC a corrente do filtro RC.
a
Is
b
Usérie
c
-
+
ILc
ILc√3
+
Lc
+
SGSC
U
- Lc
Vdc
Is
3Lc
IRC√3
+
Usérie Cc/3
ULc
Rc/3
-
-
IRC
(b) Circuito equivalente
Cc
Rc
(a) Diagram trifásico do TI-SGSC
Figura 33 - Diagrama trifásico e circuito equivalente do TI-SGSC.
Através do circuito equivalente apresentado na Subfigura 33b é possível obter-se a tensão
do conversor para que, de acordo com a corrente do estator, se obtenha a tensão série desejada
no transformador injetor. Onde, assumindo-se que:
Rc
3
XL = 3ωLc
−3
Xc =
ωCc
√
0
IRC = IRC 3
0
Rc =
(61)
(62)
(63)
(64)
a tensão de fase do conversor, dependente da corrente do estator e da tensão série do transformador injetor desejada, é dada por:
0
(R + j(Xc + XL ))
ULc = − jIs XL +Usrie c 0
(Rc + jXc )
(65)
5.1 DFIG COM O SGSC ASSOCIADO SOB DESEQUILÍBRIOS DE TENSÃO
5.1
59
DFIG COM O SGSC ASSOCIADO SOB DESEQUILÍBRIOS DE TENSÃO
O uso do DFIG com conversor série associado para lidar com desequilíbrios de tensão foi
proposto em Liao et al. (2011). A metodologia proposta na referência consiste em usar o SGSC
para reequilibrar a tensão do estator enquanto três opções de controle podem ser utilizadas para
o GSC. São elas:
• Minimizar as oscilações na potencia ativa total do DFIG.
• Minimizar as oscilações na potência reativa total do DFIG.
• Compensar eventuais resíduos de corrente de sequência negativa na saída do DFIG.
A compensação do desequilíbrio de tensão no PCC utilizando-se esta configuração do DFIG
ainda não foi proposta. Para isto, a solução natural seria utilizar o método já apresentado para
o DFIG em sua configuração tradicional, onde o GSC injeta correntes de sequência negativa
para este fim. Enquanto isso, o SGSC compensaria eventuais resíduos de tensão de sequência
negativa no estator da máquina para garantir sua operação sem oscilações de torque e o RSC
teria sua operação padrão.
Utilizando-se a mesma solução apresentada na capítulo anterior, o GSC ainda seria responsável por toda a troca de potência do rotor da máquina com a rede, o que ainda restringiria a
aplicação da compensação de desequilíbrio de tensão em algumas condições de escorregamento
da máquina. Além disso, o intuito é desenvolver uma estratégia de controle que possa ser estendida também para a configuração série do DFIG, onde há apenas 2 conversores, que será
apresentada no próximo capítulo.
Seguindo este conceito, no método aqui apresentado, o uso do GSC para a injeção de corrente de sequência negativa é utilizado de forma coordenada com o novo controle aqui proposto,
que engloba a atuação conjunta do RSC e do SGSC.
A aplicação de controles coordenados permite não apenas que se amplie a faixa operacional
dos métodos já propostos, pela utilização de duas fontes de corrente de sequência negativa,
mas também pela obtenção de mais uma fonte de potência para a manutenção da tensão do
barramento DC, com a atuação do SGSC junto a componente de sequência positiva de tensão.
Como já dito, a injeção de corrente de sequência negativa pelo estator da máquina através do
controle pelo RSC promove grandes oscilações no torque eletromagnético, sendo um método
extremamente limitado. Desta forma, é necessário o desenvolvimento de uma estratégia que
permita eliminar estas oscilações.
A solução proposta para as oscilações de torque provenientes da injeção de corrente de
sequência negativa pelo RSC se baseia nas equações das componentes oscilantes da potência
60
5 ADIÇÃO DO CONVERSOR SÉRIE AO DFIG
eletromagnética Pe,sen2 e Pe,cos2 , dadas em (50). Observando-se o conjunto de equações (57), é
possível obter uma relação entre as componentes de sequencia positiva e negativa da tensão do
estator e da corrente do rotor que resulte em oscilações nulas da potência eletromagnética da
máquina.
Observando-se as variáveis do conjunto de equações (57), onde elas se relacionam de forma
que as componentes oscilantes da potência eletromagnética sejam nulas, a tensão de sequência
positiva do estator está relacionada ao fluxo concatenado, e deve ser mantida o mais próxima
possível de seu valor nominal para a operação adequada do gerador. A corrente de sequência
positiva do rotor determina o ponto de operação da máquina, o escorregamento e a potência
ativa e reativa do estator. A corrente de sequência negativa do rotor é utilizada para o controle
de corrente de sequência negativa do estator. Logo, resta utilizar a tensão de sequência negativa
do estator para reduzir as oscilações de torque, de acordo com as outras variáveis relacionada a
ele.
Para se obter as tensões de referência de sequência negativa a serem aplicadas no estator da
máquina para a redução das oscilações de torque, deve-se primeiramente isolar as componentes
d-q de sequência negativa da tensão do estator da máquina em (57), chegando-se a:
+
Irq+
I−
−
−
+
Usd−
= Ird−
+ Usd+ − + Usq−
Ird+
rd+
(66)
+
I−
Irq+
−
−
+
Usq−
+
= Irq−
U
U
+
sd+
sd−
I+
rd+
rd+
Agora, cruzando-se as equações das componentes d-q de sequência negativa em (66), a
seguinte solução é obtida:
− + − + I I −I Irq+
−
+
Usd+
Usd− = rd−+rd+2 rq−
+ 2
+I
I
rq+
− rd+
(67)
− +
+
+Ird−
Irq+
Irq− Ird+
−
+
Usd+
Usq− =
+ 2
+ 2
I rd+ +I rq+
onde tem-se a tensão de sequência negativa do estator em função das componentes de sequência positiva e negativa da corrente do rotor e da da componente em quadratura da tensão de
sequência positiva do estator, de forma a garantir que as componentes oscilantes na potência
eletromagnética da máquina sejam nulas.
Utilizando-se (67) como referência de controle para o SGSC, as oscilações de torque deverão ser reduzidas mesmo que haja a injeção de corrente de sequência negativa pelo estator da
máquina. Desta forma, este é um controle possível tanto para a configuração do DFIG com o
SGSC associado quanto para a configuração série, onde o SGSC substitui inteiramente o GSC
original.
61
5.1 DFIG COM O SGSC ASSOCIADO SOB DESEQUILÍBRIOS DE TENSÃO
5.1.1
Controle de sequência negativa para o RSC
O controle proposto para o RSC determina a injeção de corrente de sequência negativa do
estator da máquina, com o objetivo de auxiliar o GSC na compensação do desequilíbrio de
tensão no PCC, estendendo assim nível possível de compensação do desequilíbrio de tensão.
Primeiramente, é necessário definir a referência para a injeção de corrente de sequência
negativa, que é obtida pelas equações baseadas no circuito equivalente simplificado de uma
linha de transmissão, como apresentado no capítulo anterior, onde as componentes de corrente
de sequência negativa nos eixos de referência d-q são obtidas em (60).
Segundo, é necessário definir o limite de injeção de corrente de sequência negativa do GSC.
Desta forma, é possível determinar a parcela de injeção de corrente que extrapola a capacidade
do GSC, e que deverá inserida na rede pelo estator da máquina através do controle de sequência
negativa do RSC.
Vale ressaltar que a corrente de referência está defasada em relação à corrente de saída do
DFIG pela presença do transformador que eleva a tensão de 575V para 25kV.
A Figura 34 ilustra o diagrama de blocos do controle de sequência negativa do RSC.
Is-d*
Is-d
Isabc
+
PI
-
MSOGI
-FLL
Ir-d*
-
Ir-d
Irabc
MSOGI
-FLL
+
Ir-q +
-
Is-q
-
PI
PI
PI
Urd-*
dq0
Urq-*
Ur-abc*
abc
ø
Ir-q*
+
Is-q*
Figura 34 - Diagrama de blocos do controle de sequência negativa do RSC.
Como pode ser observado no diagrama de blocos de controle na Figura 34, o controle compara o valor de referência ao valor medido da corrente de sequência negativa do estator, onde o
valor medido é obtido através de um DSOGI-QSG. Aplicando-se o erro obtido a um controlador PI, tem-se o valor de referência para a corrente do rotor, que novamente será comparada ao
valor medido para, através de um segundo controlador PI, se obter a referência de tensão nos
eixos de referência d-q. Através de um bloco transformador, os valores d-q são transformados
para o plano de referência abc e inseridos no controlador.
62
5 ADIÇÃO DO CONVERSOR SÉRIE AO DFIG
5.1.2
Controle de sequência positiva para o SGSC
Nos métodos já propostos do DFIG com três conversores associados, toda a troca de potência com a rede é feita pelo GSC. Como a adição do conversor série permite a aplicação de
estratégias de controle adicionais é interessante que possa haver mais uma fonte de absorção ou
injeção de potência, havendo uma alternativa se necessário.
O método de troca de potência com a rede por meio do SGSC foi formalizado em (KELBER; SCHUMACHER, 2001), e se dá pela indução de tensões de sequência positiva alinhadas
com a tensão da rede no SGSC. Posteriormente, análises mais aprofundadas apresentadas em
Flannery e Venkataramanan (2006, 2007, 2008) demonstraram uma limitação importante deste
método, já que a as tensões induzidas no SGSC implicam em alterações na tensão do estator, o
que pode causar a saturação do fluxo concatenado da máquina.
A Figura 35 ilustra a troca de potência por meio do SGSC.
Controle Inativo
UDFIG=1,0 p.u.
Uestator=1,0 p.u.
Controle Modo Absorção
UDFIG=1,0 p.u.
Controle Modo Injeção
UDFIG=1,0 p.u.
USGSC=0,2 p.u.
Uestator=1,2 p.u.
Iestator=-0.7 p.u.
Iestator=-0.7 p.u.
Pestator=-0.7 p.u.
Pestator=-0.84 p.u.
PDFIG=-0.7 p.u.
PDFIG=-0.7 p.u.
Uestator=0,8 p.u.
USGSC=-0,2 p.u.
Iestator=-0.7 p.u.
PSGSC=-0,14 p.u. Pestator=-0.56 p.u.
PDFIG=-0.7 p.u.
PSGSC=0,14 p.u.
Figura 35 - Exemplo de troca de potência por meio do SGSC.
Observa-se, na Figura 35, exemplos dos modos de troca de potência ativa por meio do
SGSC. Para isto, considera-se fator de potência unitário, onde as tensões da rede, do SGSC e
do estator estão alinhadas, assim como a corrente que flui do estator para a rede, passando pelo
SGSC.
Quando a tensão do SGSC é nula, as potências no lado do estator da máquina Pestator e do
lado dos terminais do DFIG PDFIG são iguais. Logo, não há troca de potência no SGSC.
Quando a tensão do SGSC é positiva, ela se soma à tensão da rede, consequentemente
aumentando o módulo da tensão do estator. Neste caso, a potência do lado do estator é maior que
a potência do lado dos terminais do DFIG, já que a corrente em ambos os lados do transformador
injetor é a mesma. A diferença entre estas potências é a potência absorvida pelo SGSC. Em
Flannery e Venkataramanan (2006, 2007, 2008) este modo de operação é tido como muito
restrito e insuficiente para a operação do DFIG em toda a sua faixa de variação de velocidade. O
nível de elevação de tensão necessário para a absorção de potência requerida quando a máquina
5.1 DFIG COM O SGSC ASSOCIADO SOB DESEQUILÍBRIOS DE TENSÃO
63
opera no modo subsíncrono com valores elevados de escorregamento implicaria na saturação
do fluxo concatenado da máquina de indução.
Quando a tensão do SGSC tem sua fase oposta a tensão da rede, diminuindo o módulo
da tensão do estator, o processo inverso acontece. Neste caso, a potência é maior do lado dos
terminais do DFIG, e a diferença entre as potências obtidas dos dois lados do transformador
é a potência injetada pelo SGSC. Neste caso, o método não possui implicações negativas na
operação do gerador de indução.
A Figura 36 ilustra o diagrama de blocos do controle de sequência positiva do SGSC.
PSGSC*
PSGSC
+
-
PI
Us+d*
-
Us+d
Usabc
MSOGI
-FLL
+
Us+q +
Ug+q -
+
PI
PI
PI
Usgsc+d*
dq0
Usgsc+q*
Usgsc+abc*
abc
ø
Us+q*
Us+q
Figura 36 - Diagrama de blocos do controle de sequência positiva do SGSC.
Como pode-se notar através da Figura 36, a troca de potência ativa pelo SGSC é feita pela
componente d de sua tensão de sequência positiva e a componente q é responsável por manter
a tensão de ambos os lados do transformador alinhadas.
É proposto que extração de potência ativa pelo SGSC seja feita de forma complementar
ao controle de potência do GSC. Logo, ela é ativada após a potência do GSC atingir o limite
estipulado, mantendo-a constante neste valor limite. Desta forma, a referência de potência para
o SGSC PSGSC * é obtida observando-se a potência do GSC e comparando-a ao limite desejado.
Como no método proposto o controle de troca de potência pelo SGSC será utilizado de
forma complementar, apenas pequenas variações de tensão acima do valor nominal serão implementadas junto ao estator da máquina, não implicando na saturação do fluxo concatenado.
5.1.3
Controle de sequência negativa para o SGSC
O controle de sequência negativa proposto para o SGSC pode atuar em dois modos distintos:
No primeiro, apenas o GSC injeta corrente de sequência negativa na rede para anular o
5 ADIÇÃO DO CONVERSOR SÉRIE AO DFIG
64
desequilíbrio de tensão, e o SGSC anula eventuais resíduos de desequilíbrios de tensão no
estator da máquina para que ela opere de forma balanceada. Para isto, basta que se utilize zero
para ambas as componentes d-q de referência para a tensão de sequência negativa do SGSC.
No segundo, o controle de injeção de corrente de sequência negativa do RSC também está
ativo, complementando a injeção de corrente de sequência negativa do GSC. Logo, o SGSC
utiliza as referências obtidas através do conjunto de equações (67) para reduzir as oscilações no
torque eletromagnético da máquina, provenientes do controle aplicado junto ao RSC.
A Figura 37 ilustra o diagrama de blocos para o controle de sequência negativa para o
SGSC.
Us-d*
-
Us-d
Usabc
MSOGI
-FLL
+
Us-q +
-
PI
PI
Usgsc-d*
dq0
Usgsc-q*
Usgsc-abc*
abc
ø
Us-q*
Figura 37 - Diagrama de blocos do controle de sequência negativa do SGSC.
A estrutura de controle é bastante simples, onde basta comparar os valores de referência
já citados às componentes de sequência negativa da tensão do estator, obtidas através de um
DSOGI-FLL. Após a inserção do erro junto a um controlador PI, as referências para a tensão
do SGSC são obtidas.
5.1.4
Controle de sequência negativa para o GSC
O controle de sequência negativa para o GSC é o mesmo utilizado no capítulo anterior,
assim como a forma de obtenção das referências de corrente para a anulação do desequilíbrio
de tensão no PCC. Como diferença, necessita-se de uma definição clara de um limite para este
controle, onde se iniciará também a injeção de corrente de sequência negativa pelo estator da
máquina, através do controle do RSC.
A faixa de operação do controle de injeção de corrente de sequência negativa será estendida
pelo controle coordenado entre os dois conversores. O limite estipulado é dado pela componente
oscilante da potência ativa do GSC. Para isto, é necessário se obter a potência do GSC decomposta em sua componente contínua mais suas componentes oscilantes. Para isto, utilizando-se
a tensão e corrente do GSC, aplica-se a mesma definição de potência já utilizada para o estator
da máquina:
+
+
+
+
+
+
+
+
PGSC = −Re(UGSCdq
IˆGSCdq
) = −Re(UGSCdq
.IGSCdq
) = −(UGSCd
IGSCd
+UGSCq
IGSCq
)
(68)
65
5.1 DFIG COM O SGSC ASSOCIADO SOB DESEQUILÍBRIOS DE TENSÃO
+
+
+
+
+
+
+
+
QGSC = −Im(UGSCdq
IˆGSCdq
) = Im(UGSCdq
× IGSCdq
) = −(UGSCd
IGSCq
−UGSCq
IGSCd
)
(69)
Substituindo-se a tensão e corrente pelas suas formas decompostas pelo método das componentes simétricas, com suas partes oscilantes explicitas por cossenos e senos,
+
+
−
UGSCdq
= UGSCdq+
+UGSCdq−
[cos(2ω1t) − jsen(2ω1t)]
(70)
+
+
−
IGSCdq
= IGSCdq+
+ IGSCdq−
[cos(2ω1t) − jsen(2ω1t)]
(71)
obtêm-se separadamente elementos de potência contínuos e oscilantes em cossenos e senos,
onde pode-se reescrever as potências ativa e reativa da seguinte forma:
onde,
PGSC,dc
PGSC,cos 2
P
GSC,sin 2
QGSC,dc
Q
GSC,cos 2
QGSC,sin 2
PGSC = PGSC,dc + PGSC,cos 2 cos(2ω1t) + PGSC,sen2 sen(2ω1t)
(72)
QGSC = QGSC,dc + QGSC,cos 2 cos(2ω1t) + QGSC,sen2 sen(2ω1t)
(73)
+
UGSCd+
+
UGSCq+
−
UGSCd−
= −
−
UGSCd−
−
UGSCq−
+
UGSCd+
−
UGSCq−
−
+
−UGSCd−
−UGSCq+
+
UGSCq+
+
−UGSCd+
−
UGSCq−
−
UGSCq−
−
−UGSCd−
+
UGSCq+
−
−
−UGSCd−
−UGSCq−
+
UGSCd+
−
UGSCq−
+
UGSCq+
+
UGSCd+
−
−UGSCd−
+
−UGSCd+
+
UGSCq+
+
IGSCd+
+
IGSCq+
−
IGSCd−
−
IGSCq−
(74)
Vale ressaltar que este mesmo método também pode ser empregado para calcular as potências do RSC e SGSC de forma decomposta, o que será útil para avaliar a operação dos conversores durante a atuação dos controles implementados. Para isto, deve-se apenas substituir nas
equações obtidas as respectivas tensões e correntes.
O limite do controle de sequência negativa do GSC é dado pela componente oscilante da
potência ativa, que consiste na soma de suas componentes de cosseno e seno. Quando esta
componente oscilante atinge o valor determinado nas simulações este controle atinge seu limite
e o RSC inicia o controle complementar.
5.1.5
Modelagem, simulação e apresentação dos resultados
O sistema de testes utilizado é idêntico ao apresentado no capítulo anterior. Porém, a ele
estão conectadas 5 turbinas com conversor série acoplado. Os dados do gerador de indução e dos
conversores originais foram mantidos, assim como a capacitância do link DC. Os parâmetros
das turbinas são apresentados na Tabela 3, onde foram apenas adicionados os dados referentes
ao SGSC em relação ao capítulo anterior.
66
5 ADIÇÃO DO CONVERSOR SÉRIE AO DFIG
A velocidade do vento também é mantida em 12,5m/s. O desequilíbrio de tensão induzido
na fonte de tensão controlada tem seu VUF elevado para 7,5%, devido à maior capacidade de
compensação de desequilíbrio de tensão pelo controle coordenado.
Tabela 3 - Dados utilizados para a modelagem do Gerador
de indução duplamente alimentado - Capítulo 5
Parâmetros do DFIG
Potência Nominal
2MVA
Tensão Nominal/ Frequência 575V/60Hz
Rs
0.023Ω
Gerador de Indução Rr
0.016Ω
Lls
0.18H
Llr
0.16H
Constante de Inércia
0.685s
Pares de Pólos
3
GSC
Lg
0.00273H
SGSC
Lc
Cc
Rc
0.001H
0.012F
0.5Ω
Link DC
Cdc
0.03F
A Figura 38 ilustra o sistema.
Acoplamento
Mecânico
Rotor/Estator
Y/Y
DFIG
us
Transformador
Injetor
usérie
SGSC
Δ
Transformador
Y/Δ
Transformador
Δ/Y
upcc
Linha-π
π
50 km
575V/25kV
2.5MVA
25kV/120kV
47MVA
Carga
8MW
RSC
GSC
Indutância
Mútua
2500 MVA
X0/X1=3
Fonte de Tensão
Controlada
120kV
Transformador
de Aterramento
Parque Eólico
5 x 2MVA DFIG
Figura 38 - Sistema implementado - DFIG com conversor série associado.
Para a visualização dos controles coordenados, limites foram estipulados para a potência do
GSC, onde a potência máxima a ser utilizada para este conversor, considerando-se a componente
contínua mais as componentes oscilantes, é de 0.18 p.u.. A partir deste ponto a troca de potência
com a rede passa a ser feita pelo controle de sequência positiva do SGSC. Quanto ao limite do
controle de sequência negativa, ele é limitado à potência oscilante de 0.13 p.u, e a partir deste
ponto o RSC inicia o controle coordenado para prover o restante da corrente necessária para
anular o desequilíbrio de tensão no PCC.
67
5.1 DFIG COM O SGSC ASSOCIADO SOB DESEQUILÍBRIOS DE TENSÃO
Para a melhor visualização, os resultados são apresentados divididos em 4 diferentes períodos, em uma lógica sequencial de ativação dos controles. Porém, a ativação dos controles
poderia ser feita de forma conjunta. São eles:
• Primeiro período (0 a 4s) - Um desequilíbrio com VUF de 7,5% é induzido na fonte de
tensão controlada.
• Segundo período (4 a 8s) - O controle de sequência negativa do GSC é ativado e limitado
no valor de potência estipulado. O SGSC anula o desequilíbrio de tensão no estator da
máquina.
• Terceiro período (8 a 12s) - O controle de sequência negativa do RSC é ativado de forma
conjunta com o GSC.
• Quarto período (12 a 16s) - O modo de controle de sequência negativa do SGSC é alterado, deixando de anular o desequilíbrio de tensão no estator e passando a aplicar o
conjunto de equações (67) como referência para anular as oscilações de torque devido ao
controle de sequência negativa do RSC.
A Figura 39 ilustra as tensões no PCC e no estator da máquina.
0.1
0.8
0.7
d
q
0.6
0.5
0.4
0.3
0
4
8
12
Tensão no PCC S.N.
(p.u.)
Tensão no PCC S.P.
(p.u.)
1
0.9
0.05
d
q
0
−0.05
0
16
4
Tempo (s)
1.1
0.9
0.7
d
q
0.5
0.3
0.1
4
8
Tempo (s)
(c) Estator - Sequência Positiva
12
16
(b) PCC - Sequência negativa
12
16
Tensão do estator S.N.
(p.u.)
Tensão do estator S.P.
(p.u.)
(a) PCC - Sequência Positiva
−0.1
0
8
Tempo (s)
0.1
0.05
0
d
q
−0.05
−0.1
−0.15
0
4
8
12
16
Tempo (s)
(d) Estator - Sequência negativa
Figura 39 - DFIG com conversor série associado - Tensões no PCC e no estator.
Como pode-se observar no primeiro período da Subfigura 39b, o desequilíbrio de tensão da
fonte controlada se propaga até o PCC. No segundo período, nota-se que o limite de potência
imposto para o controle de sequência negativa do GSC não permite a total compensação do
desequilíbrio de tensão. Com o controle do RSC também ativo, o desequilíbrio é praticamente
eliminado nos períodos três e quatro.
5 ADIÇÃO DO CONVERSOR SÉRIE AO DFIG
68
A Subfigura 39c ilustra a tensão de sequência positiva do estator da máquina. À partir do
segundo período, o limite de potência estipulado para o GSC é alcançado e o SGSC passa a
absorver potência ativa da rede. Desta forma, observa-se elevações na componente d da tensão
do estator de acordo com o aumento da potência demandada pela atuação dos controles de
sequência negativa dos conversores.
Na Subfigura 39d, observa-se a atuação do SGSC junto ao desequilíbrio de tensão do estator, onde, nos períodos dois e três ele é praticamente anulado, e no período quatro a tensão de
sequência negativa do estator assume o valor de referência para reduzir as oscilações de torque.
0.9
0.8
0.7
d
q
0.6
0.5
0.4
0
4
8
12
Corrente da carga S.N.
(p.u.)
Corrente da carga S.P.
(p.u.)
A Figura 40 ilustra a corrente na carga.
0.1
0.05
0
−0.05
0
16
d
q
4
Tempo (s)
8
12
16
Tempo (s)
(a) Carga - Sequência Positiva
(b) Carga - Sequência negativa
Figura 40 - DFIG com conversor série associado - Corrente na carga.
Observa-se, por meio da figura 40, que a corrente da carga acompanha os padrões da tensão
de sequência positiva do PCC, sendo afetada também pelos transitórios. Assim como sua corrente de sequência negativa, que responde ao nível de desequilíbrio de tensão, sendo também
anulada no terceiro e quarto períodos.
0.1
−0.1
d
q
−0.3
−0.5
−0.7
0
4
8
12
Corrente do estator S.N.
(p.u.)
Corrente do estator S.P.
(p.u.)
As correntes no estator e no rotor da máquina são ilustradas na Figura 41.
16
0.1
0.05
d
q
0
−0.05
−0.1
0
4
Tempo (s)
(a) Estator - Sequência Positiva
16
0.1
0.7
0.5
0.3
d
q
0.1
−0.1
−0.3
4
8
Tempo (s)
(c) Rotor - Sequência Positiva
12
16
Corrente do rotor S.N.
(p.u.)
Corrente do rotor S.P.
(p.u.)
12
(b) Estator - Sequência negativa
0.9
−0.5
0
8
Tempo (s)
0.05
d
q
0
−0.05
0
4
8
Tempo (s)
(d) Rotor - Sequência negativa
Figura 41 - DFIG com conversor série associado - Correntes no estator e no rotor.
12
16
69
5.1 DFIG COM O SGSC ASSOCIADO SOB DESEQUILÍBRIOS DE TENSÃO
Nota-se, na Subfigura 41a, que a componente d da corrente de sequência positiva do estator
acompanha as variações da tensão para que o DFIG não apresente variações de potência. Quanto
a corrente de sequência negativa, apresentada na Subfigura 41b, ela é anulada no segundo período devido à atuação do SGSC para compensar o desequilíbrio de tensão no estator. Já no
terceiro e quarto períodos, ela assume o valor necessário para complementar a compensação do
desequilíbrio de tensão no PCC.
A corrente no rotor, representada nas Subfiguras 41c e 41d, é responsável pelo controle da
corrente no estator. Logo, a componente de sequência positiva tem comportamento similar à
do estator. Já a componente de sequência negativa, apresenta uma variação no quarto período
se comparada ao comportamento da corrente no estator devido à alteração da tensão estatórica
para a compensação das oscilações de torque. Desta forma, é necessária a correção do valor
do desequilíbrio de corrente no rotor para que a injeção de corrente de sequência negativa pelo
estator se mantenha inalterada.
A Figura 42 apresenta a corrente no GSC.
0.3
0.06
0.04
d
q
0.02
0
−0.02
0
4
8
12
16
Corrente do GSC S.N.
(p.u.)
Corrente do GSC S.P.
(p.u.)
0.08
0.2
0.1
d
q
0
−0.1
−0.2
0
4
Tempo (s)
(a) GSC - Sequência Positiva
8
12
16
Tempo (s)
(b) GSC - Sequência negativa
Figura 42 - DFIG com conversor série associado - Corrente no GSC.
Na Figura 42, observa-se que a corrente de sequência positiva, no primeiro período, é mais
elevada devido à prover toda a troca de potência entre o rotor da máquina e a rede. No segundo
e terceiro períodos ela é reduzida, devido ao SGSC auxiliar na absorção de potência. No quarto
período, após o transitório devido a ativação do controle do SGSC, ela novamente retorna ao
valor do período anterior.
A corrente de sequência negativa assume seu valor máximo permitido para a compensação
do desequilíbrio de tensão no PCC a partir do segundo período, já que, o limite de potência
oscilante estipulado não permite que níveis mais altos desta componente de corrente sejam
injetados na rede pelo GSC.
O torque eletromagnético da máquina operando com e sem desequilíbrio de tensão, a tensão
no link DC e a velocidade angular do rotor são apresentadas na Figura 43. Na Subfigura 43b,
o torque da máquina, operando sob tensão da rede equilibrada, é apresentado para efeito de
comparação.
5 ADIÇÃO DO CONVERSOR SÉRIE AO DFIG
−0.45
Torque Eletromagnético
(p.u.)
Torque Eletromagnético
(p.u.)
70
−0.5
−0.55
−0.6
−0.65
−0.7
0
4
8
12
−0.45
−0.5
−0.55
−0.6
−0.65
16
−0.7
0
4
Tempo (s)
Tempo (s)
(a) Torque eletromagnético - Tensão desequilibrada (b) Torque eletromagnético - Tensão equilibrada
Velocidade do rotor (p.u.)
Tensão no Link DC
(p.u.)
1.05
1
0.95
0
4
8
12
16
1
0.95
0.9
0.85
0.8
0
(c) Tensão no link DC
2
4
6
8
Tempo(s)
Tempo (s)
(d) Velocidade Angular do Rotor
Figura 43 - DFIG com conversor série associado - Te, Vdc e wr.
No primeiro período da Subfigura 43a, observa-se as oscilações de torque devido à presença
de desequilíbrio de tensão no estator da máquina, que são reduzidas para valores próximos dos
obtidos na operação equilibrada, com a compensação do desequilíbrio de tensão no estator pelo
SGSC no segundo período. No terceiro período, as oscilações retornam devido ao controle
de injeção de corrente de sequência negativa pelo RSC. Já no quarto período, o controle de
oscilações de torque do SGSC as reduzem novamente para valores próximos aos obtidos na
operação balanceada.
Como pode-se notar na Subfigura 43c, a tensão no link DC apresenta oscilações de acordo
com o grau de controle de sequência negativa implementado, sendo aumentadas de acordo
com a ativação gradual de cada um dos controles e, no quarto período, com todos os controles
ativos, ela apresenta seu maior grau de oscilações. O DFIG, neste caso, opera com torque
eletromagnético de 0.58 p.u. e velocidade angular de 0.9 p.u..
As potências ativa e reativa no estator da máquina, assim como, as potências totais do DFIG,
são apresentadas na Figura 44.
A potência ativa do estator, apresentada na Subfigura 44a, tem suas oscilações acompanhando a corrente de sequência negativa do rotor da máquina. Já a potência reativa, apresentada
na Subfigura 44b, tem suas oscilações acompanhando as oscilações no torque eletromagnético.
A potência ativa total do DFIG, ilustrada na Subfigura 44c, é reduzida se comparada a do
estator devido à absorção de potência pelo GSC e SGSC, e suas oscilações variam com o grau
de injeção de sequência negativa, assim como as oscilações presentes na potência reativa, como
mostrado na Subfigura 44d.
71
0.7
Potência reativa do estator
(p.u.)
Potência ativa do estator
(p.u.)
5.1 DFIG COM O SGSC ASSOCIADO SOB DESEQUILÍBRIOS DE TENSÃO
P
S
0.65
PSdc
0.6
0.55
0.5
0.45
0
4
8
12
0.1
Q
S
QSdc
0.05
0
−0.05
−0.1
0
16
4
8
Tempo (s)
0.7
PDFIG
PDFIGdc
0.5
0.3
0.1
0
4
16
(b) Estator - Potência reativa
8
12
16
Potência reativa total DFIG
(p.u.)
Potência ativa total DFIG
(p.u.)
(a) Estator - Potência ativa
0.9
12
Tempo (s)
0.3
0.2
QDFIG
QDFIGdc
0.1
0
−0.1
−0.2
−0.3
0
3
6
(c) DFIG - Potência ativa
9
12
Tempo (s)
Tempo (s)
(d) DFIG - Potência reativa
Figura 44 - DFIG com conversor série associado - Potências ativa e reativa do estator e do DFIG.
0.2
PGSC
0.1
PGSCdc
Potência reativa do GSC
(p.u.)
Potência ativa do GSC
(p.u.)
Nas próximas figuras, serão apresentadas as potências para cada um dos conversores. A
Figura 45 traz as potências ativa e reativa do GSC. Nela, pode-se observar os dois limites de
potência ativa impostos a este conversor. O limite das componentes oscilantes de 0.13 p.u. e o
limite total de potência, que consiste na parcela contínua mais oscilante, de 0.18 p.u.
0
−0.1
−0.2
−0.3
0
4
8
12
16
0.3
0.2
QGSC
QGSCdc
0.1
0
−0.1
−0.2
−0.3
0
Tempo(s)
4
8
12
16
12
16
Tempo (s)
(a) GSC - Potência ativa
(b) GSC - Potência reativa
Figura 45 - DFIG com conversor série associado - Potências ativa e reativa do GSC.
0.1
0.05
PSGSC
PSGSCdc
0
−0.05
−0.1
−0.15
0
4
8
Tempo(s)
(a) SGSC - Potência ativa
12
16
Potência Reativa do SGSC
(p.u.)
Potência ativa do SGSC
(p.u.)
Já a Figura 46, ilustra as potências ativa e reativa do SGSC.
0.1
0.05
QSGSC
QSGSCdc
0
−0.05
−0.1
0
4
8
Tempo(s)
(b) SGSC - Potência reativa
Figura 46 - DFIG com conversor série associado - Potências ativa e reativa do SGSC.
Por meio da Figura 46, nota-se a variação da potência ativa do SGSC após o segundo período, indicando a absorção de energia da rede para o barramento DC de acordo com a demanda
5 ADIÇÃO DO CONVERSOR SÉRIE AO DFIG
72
de potência dos controles implementados nos conversores em cada período. A potência reativa
também apresenta variações durante os transitórios entre os controles. O quarto período apresenta o maior nível de absorção de potência, assim como, as maiores oscilações. Isto se deve
ao controle de sequência negativa do SGSC estar no modo de compensação das oscilações do
torque elétromagnético, o que requer maior variação da tensão de sequência negativa do estator.
Potência ativa do RSC
(p.u.)
0.25
0.2
0.15
Potência reativa do RSC
(p.u.)
Na Figura 47 são apresentas as potências ativa e reativa do RSC.
PRSC
PRSCdc
0.1
0.05
0
−0.05
−0.1
0
4
8
Tempo(s)
(a) RSC - Potência ativa
12
16
0.25
0.15
QRSC
QRSCdc
0.05
−0.05
−0.15
0
4
8
12
16
Tempo(s)
(b) RSC - Potência reativa
Figura 47 - DFIG com conversor série associado - Potências ativa e reativa do RSC.
Na Figura 47, pode ser observado que as maiores oscilações de potência não se devem
simplesmente ao controle de injeção de sequência negativa, mas sim, a este controle combinado
com o controle de oscilações de torque do SGSC.
5.2
CONSIDERAÇÕES
Neste capítulo, foi apresentado um método de controle coordenado para o DFIG com conversor série associado visando estender o limite de atuação da compensação do desequilíbrio
de tensão. Através dele, foi possível absorver potência extra para a utilização nos conversores,
além de dividir as funções dos controles de sequência negativa entre todos, possibilitando assim
estender sua faixa de operação. A divisão das componentes contínuas e oscilantes de potência
entre os conversores também permite um balanço bastante interessante, evitando a sobrecarga
de um dos deles durante a operação do DFIG.
Algumas considerações a respeito dos resultados são feitas a seguir:
O limite da absorção de potência pelo SGSC deve ser definido de acordo com o valor de
tensão observado no estator da máquina, evitando-se a condição de sobretensão e a consequente
saturação do fluxo concatenado. Como este controle atua de forma complementar, apenas pequenas elevações da tensão do estator da máquina foram observadas nos resultados. Desta
forma, a probabilidade de ocorrer a saturação é reduzida.
O resultados comprovaram que é possível a injeção de corrente de sequência negativa através do estator da máquina sem comprometer o torque eletromagnético com oscilações, desde
que a tensão adequada de sequência negativa seja implementada junto ao estator.
5.2 CONSIDERAÇÕES
73
Os resultados mostram ainda, que as oscilações na tensão do barramento DC aumentam de
acordo com a quantidade de controles de sequência negativa implementados e com o nível de
potência oscilante que estes controles exigem. Desta forma, é necessário atenção para que o
nível de oscilações não ocasionem comportamentos indesejados junto aos conversores.
74
5 ADIÇÃO DO CONVERSOR SÉRIE AO DFIG
75
6
CONFIGURAÇÃO SÉRIE DO DFIG
A configuração série do DFIG, onde o SGSC substitui totalmente o GSC englobando a
função do controle de tensão do barramento DC, foi apresentada inicialmente por Kelber e
Schumacher (2001). Porém, posteriormente foi demonstrado que o método proposto para a
absorção de potência ativa da rede pelo SGSC, que é necessária quando a turbina opera em
modo subsíncrono, poderia causar problemas de saturação no fluxo concatenado da máquina
devido à elevação da tensão no estator da máquina (FLANNERY; VENKATARAMANAN,
2006, 2007, 2008).
Apesar das limitações apresentadas, alguns trabalhos seguiram esta linha desconsiderando
este problema (JAYANTI et al., 2008; MASSING; PINHEIRO, 2008). Outro ponto que foi
apresentado como limitação é a operação do DFIG em condições sem carga, onde a corrente do
estator é próxima a zero, impossibilitando o controle da tensão do link DC por parte do SGSC.
Porém, em Massing e Pinheiro (2009) é demonstrado que é possível operar esta configuração
do DFIG nesta condições evitando-se uma determinada região próxima à origem da curva PQ.
Esta configuração do DFIG é ilustrada na Figura 48.
Pm
Transformador
Série
Ug
usérie
us
DFIG
Acoplamento
Mecânico
Pm
REDE
Pm/ (1-s)
Transformador
-s Pm/ (1-s)
RSC
SGSC
Figura 48 - Configuração série do DFIG.
Neste capítulo, primeiramente será demonstrado o controle de injeção de corrente de sequência negativa proposto para esta configuração. Nesta etapa, utiliza-se ainda o método padrão de
injeção/absorção de potência ativa pelo SGSC apresentado na literatura.
Em seguida é apresentado o método desenvolvido para o controle de potência do SGSC,
quando a turbina opera em modo subsíncrono, através da defasagem de tensão e corrente do
estator da máquina, evitando assim a variação da amplitude da tensão do estator e a saturação
do fluxo concatenado da máquina.
Finalmente, ambos os controles são associados chegando-se ao resultado final desejado.
6 CONFIGURAÇÃO SÉRIE DO DFIG
76
6.1
MÉTODO DE INJEÇÃO DE CORRENTE DE SEQUÊNCIA NEGATIVA
O método utilizado neste capítulo, para a compensação do desequilíbrio de tensão no PCC,
é o mesmo utilizado como controle complementar no capítulo anterior, onde o RSC é responsável pela injeção de corrente de sequência negativa, como apresentado no diagrama de blocos
de controle na Figura 34, e o SGSC responsável pela compensação das oscilações do torque
eletromagnético, que tem seu método de controle ilustrado na Figura 37.
O método de absorção/injeção de potência reativa pelo SGSC utilizado nesta sessão da tese
também é o mesmo, modificando-se apenas o sinal de referência para a obtenção componente
d da tensão do estator para a variação de tensão do link DC. O novo diagrama de blocos de
controle é apresentado na Figura 49. Vale ressaltar que nesta configuração do DFIG o GSC é
removido.
Vdc*
Vdc
+
-
Us+d*
PI
-
Us+d
Usabc
MSOGI
-FLL
Us+q +
PI
+
dq0
Usgsc+q*
PI
Ug+q -
Usgsc+d*
PI
+
Usgsc+abc*
abc
ø
Us+q*
Us+q
Figura 49 - DFIG série - Diagrama de blocos do controle tradiconal de sequência positiva do SGSC.
6.1.1
Modelagem, simulação e apresentação dos resultados
Acoplamento
Mecânico
Transformador
Série
usérie
DFIG
Transformador
Transformador
PCC
us
upcc
Linha-π
π
50 km
575V/25kV
2.5MVA
RSC
SGSC
Parque Eólico
5 x 2MVA DFIG
Figura 50 - Sistema implementado - DFIG série.
25kV/120kV
47MVA
Carga
8MW
Transformador
Aterrador
Indutância
Mútua
2500 MVA
X0/X1=3
Fonte de Tensão
Controlada
120kV
77
6.1 MÉTODO DE INJEÇÃO DE CORRENTE DE SEQUÊNCIA NEGATIVA
No modelo utilizado, cinco turbinas na configuração série são conectadas ao mesmo sistema de testes dos capítulos anteriores. O desequilíbrio de tensão induzido na fonte controlada
tem um VUF de 3%, já que espera-se deste método menor capacidade de compensação se
comparado a estratégia de controles coordenados implementada no DFIG com conversor série
associado. O sistema modelado é ilustrado pela Figura 50, e os dados das turbinas utilizadas
são apresentados na Tabela 4.
Tabela 4 - Dados utilizados para a modelagem do Gerador
de indução duplamente alimentado - Capítulo 6
Parâmetros do DFIG
Potência Nominal
2MVA
Tensão Nominal/ Frequência 575V/60Hz
Rs
0.023Ω
Gerador de Indução Rr
0.016Ω
Lls
0.18H
Llr
0.16H
Constante de Inércia
0.685s
Pares de Pólos
3
SGSC
Lc
Cc
Rc
Link DC
Cdc
0.001H
0.012F
0.5Ω
0.3F
Nesta etapa de simulações, os resultados são apresentados divididos em 2 diferentes períodos, diferenciados pela atuação dos controles de sequência negativa. São eles:
• Primeiro período (0 a 4s) - Um desequilíbrio com VUF de 3% é induzido na fonte de
tensão controlada.
• Segundo período (4 a 8s) - Os controle de sequência negativa do RSC e SGSC são ativados
de forma a compensar o desequilíbrio de tensão no PCC e reduzir as oscilações no torque.
A Figura 51 ilustra as tensões no PCC e no estator da máquina. Observa-se, através da
Subfigura 51b, que o desequilíbrio de tensão propagado da fonte de tensão controlada ao PCC
é reduzido através da injeção de corrente de sequência negativa pelo estator da máquina.
A Subfigura 51c mostra que a tensão de sequência positiva do estator é maior que 1,0 p.u.,
o que se deve ao controle de absorção de potência do SGSC, que eleva a tensão do estator em
relação à tensão da rede. Ainda nesta Subfigura, no segundo período, observa-se mais uma
elevação no módulo da tensão, devido à demanda de potência pelos controles de sequência
negativa.
6 CONFIGURAÇÃO SÉRIE DO DFIG
78
No segundo período da Subfigura 51d, pode-se visualizar a tensão de sequência negativa
induzida no estator para a redução das oscilações do torque eletromagnético.
0.01
0.8
0.7
d
q
0.6
0.5
0.4
0.3
0
4
Tensão no PCC S.N.
(p.u.)
Tensão no PCC S.P.
(p.u.)
1
0.9
0
−0.02
−0.03
0
8
Tempo (s)
0.9
d
q
0.3
0.1
4
Tensão do estator S.N.
(p.u.)
Tensão do estator S.P.
(p.u.)
1.1
−0.1
0
8
(b) PCC - Sequência negativa
1.3
0.5
4
Tempo (s)
(a) PCC - Sequência Positiva
0.7
d
q
−0.01
0.2
0.1
−0.1
−0.2
0
8
d
q
0
Tempo (s)
4
8
Tempo (s)
(c) Estator - Sequência Positiva
(d) Estator - Sequência negativa
Figura 51 - DFIG série - Injeção de corrente - Tensões no PCC e no estator.
0.9
0.8
0.7
d
q
0.6
0.5
0.4
0
4
8
Corrente da carga S.N.
(p.u.)
Corrente da carga S.P.
(p.u.)
A Figura 52 traz a corrente na carga. Nela, no segundo período, observa-se a eliminação do
desequilíbrio de corrente devido à restauração do equilíbrio da tensão no PCC.
0.02
0
−0.01
−0.02
−0.03
0
Tempo (s)
(a) Carga - Sequência Positiva
d
q
0.01
4
8
Tempo (s)
(b) Carga - Sequência negativa
Figura 52 - DFIG série - Injeção de corrente - Corrente na carga.
As correntes no estator e no rotor da máquina são ilustradas na Figura 53.
Quanto maior o módulo tensão do estator menor deve ser o módulo da corrente para que se
mantenha a potência da máquina constante. Logo, como a tensão do estator é elevada para a
absorção de potência pelo SGSC, a corrente da máquina é reduzida, como pode-se observar na
Subfigura 53a.
Na Subfigura 53b, no segundo período, observa-se a corrente de sequência negativa injetada
pelo estator da máquina para que se reduza o desequilíbrio de tensão no PCC. Na Subfigura 53d,
nota-se a corrente de sequência negativa induzida no enrolamento do rotor da máquina pelo RSC
para o controle da corrente do estator.
79
0
Corrente do estator S.N.
(p.u.)
Corrente do estator S.P.
(p.u.)
6.1 MÉTODO DE INJEÇÃO DE CORRENTE DE SEQUÊNCIA NEGATIVA
−0.1
−0.2
d
q
−0.3
−0.4
−0.5
−0.6
−0.7
0
4
8
0.2
d
q
0.1
0
−0.1
−0.2
0
4
Tempo (s)
(a) Estator - Sequência Positiva
(b) Estator - Sequência negativa
0.1
Corrente do rotor S.N.
(p.u.)
Corrente do rotor S.P.
(p.u.)
0.9
0.7
0.5
0.3
d
q
0.1
−0.1
−0.3
−0.5
0
8
Tempo (s)
4
0.05
0
d
q
−0.05
−0.1
−0.15
0
8
4
Tempo (s)
8
Tempo (s)
(c) Rotor - Sequência Positiva
(d) Rotor - Sequência negativa
Figura 53 - DFIG série - Injeção de corrente - Correntes no estator e no rotor.
−0.45
Torque Eletromagnético
(p.u.)
Torque Eletromagnético
(p.u.)
O torque eletromagnético da máquina operando na presença e na ausência de desequilíbrio
de tensão, a tensão no barramento DC e a velocidade angular do rotor são apresentadas na
Figura 54.
−0.5
−0.55
−0.6
−0.65
−0.7
0
4
−0.45
−0.5
−0.55
−0.6
−0.65
8
−0.7
0
4
Tempo (s)
Tempo (s)
(a) Torque eletromagnético - Tensão desequilibrada (b) Torque eletromagnético - Tensão equilibrada
Velocidade do rotor (p.u.)
Tensão no Link DC
(p.u.)
1.01
1.005
1
0.995
0.99
0
4
8
1
0.95
0.9
0.85
0.8
0
(c) Tensão no link DC
2
4
6
8
Tempo(s)
Tempo (s)
(d) Velocidade Angular do Rotor
Figura 54 - DFIG série - Injeção de corrente - Te, Vdc e wr.
Observando-se o torque eletromagnético, quando o controle de oscilações de torque do
SGSC está ativo, apresentado no segundo período da Subfigura 54a, e comparando-se ao seu
comportamento quando a máquina opera com tensão equilibrada, apresentado na Subfigura 54b,
nota-se que as oscilações podem ser consideradas reduzidas à níveis normais.
As oscilações da tensão no barramento DC, apresentada na Subfigura 54c, foram reduzidas
em comparação aos capítulos anteriores devido ao aumento da capacitância, que foi implemen-
6 CONFIGURAÇÃO SÉRIE DO DFIG
80
tado para reduzir distorções nos resultados, atrapalhando assim a visualização da eficiência do
método de controle proposto.
As velocidades angulares demonstram os diferentes pontos de operação de cada turbina,
como pode ser observado na Subfigura 54d.
1
0.8
Potência reativa do estator
(p.u.)
Potência ativa do estator
(p.u.)
As potências ativa e reativa do estator da máquina, assim como as potências totais do DFIG,
são apresentadas na Figura 55.
PS
PSdc
0.6
0.4
0.2
0
4
8
0.05
0
QS
QSdc
−0.05
−0.1
−0.15
0
4
Tempo (s)
0.6
(b) Estator - Potência reativa
PDFIG
PDFIGdc
0.5
0.4
0.3
0
4
8
Potência reativa total DFIG
(p.u.)
Potência ativa total DFIG
(p.u.)
(a) Estator - Potência ativa
0.7
8
Tempo (s)
0.1
QDFIG
QDFIGdc
0
−0.1
−0.2
0
3
(c) DFIG - Potência ativa
6
Tempo (s)
Tempo (s)
(d) DFIG - Potência reativa
Figura 55 - DFIG série - Injeção de corrente - Potências ativa e reativa do estator e do DFIG.
Nota-se, na Subfigura 55a, as oscilações da potência ativa da máquina, que tem um incremento no segundo período devido à injeção de corrente de sequência negativa através do estator.
Já na Subfigura 55b, observa-se a redução das oscilações na potência reativa, devido às reduções
nas oscilações da potência eletromagnética.
Observando-se as potências ativa e reativa totais do DFIG, dadas pelas Subfiguras 55c e
55d, percebe-se que a injeção da corrente de sequência negativa através do estator da máquina
promove um incremento das oscilações em ambas as componentes de potência.
0.05
0
PSGSC
PSGSCdc
−0.05
−0.1
−0.15
−0.2
0
4
Tempo(s)
(a) SGSC - Potência ativa
8
Potência Reativa do SGSC
(p.u.)
Potência ativa do SGSC
(p.u.)
A Figura 56 ilustra as potências ativa e reativa do SGSC.
0.1
0.05
QSGSC
QSGSCdc
0
−0.05
−0.1
0
4
Tempo(s)
(b) SGSC - Potência reativa
Figura 56 - DFIG série - Injeção de corrente - Potências ativa e reativa do SGSC.
8
81
6.2 ABSORÇÃO DE POTÊNCIA PELO SGSC - MODO SUBSÍNCRONO
Nota-se, no segundo período da Subfigura 56a, o incremento na componente contínua de
potência devido à demanda dos controles de sequência negativa. Além disso, percebe-se que a
maior parte da potências ativa e a totalidade da potência reativa são compostas pelas componentes oscilantes de frequência 2ω 1 .
Potência ativa do RSC
(p.u.)
0.4
0.3
Potência reativa do RSC
(p.u.)
As potências ativa e reativa do RSC são apresentas na Figura 57.
PRSC
PRSCdc
0.2
0.1
0
−0.1
−0.2
0
4
Tempo(s)
(a) RSC - Potência ativa
8
0.3
0.2
QRSC
QRSCdc
0.1
0
−0.1
−0.2
0
4
8
Tempo(s)
(b) RSC - Potência reativa
Figura 57 - DFIG série - Injeção de corrente - Potências ativa e reativa do RSC.
Novamente, através da Figura 57, observa-se que a componente contínua na potência ativa
é reduzida se comparada a componente oscilante. Já a potência reativa apresenta apenas a
componente oscilante de frequência 2ω 1 .
6.2
ABSORÇÃO DE POTÊNCIA PELO SGSC - MODO SUBSÍNCRONO
Como já citado, a metodologia até então proposta para a troca potência do rotor do DFIG
com a rede elétrica, utilizando-se SGSC, atende adequadamente apenas ao modo supersíncrono
de operação, onde ocorre a injeção da potência produzida no rotor da máquina na rede. Neste
caso, o SGSC induz uma tensão no transformador injetor em oposição de fase com a tensão
da rede, o que promove uma redução na tensão do estator da máquina, condição esta que não
limita sua operação.
Já esta metodologia de controle aplicada no modo subsíncrono, onde é necessária a absorção de potência da rede para a injeção no rotor da máquina, não permite a operação do DFIG
em toda a faixa de controle de escorregamento necessária para a operação em velocidade variável. Dado que, a absorção de potência é feita induzindo-se uma tensão junto ao transformador
injetor do SGSC que se soma à tensão da rede, impõe-se uma condição de sobretensão à máquina de indução. Apesar desta limitação ter sido apresentada a uma década atrás por Flannery
e Venkataramanan (2006), nenhuma alternativa foi desenvolvida para contornar este problema
até o presente momento.
A solução aqui formalizada, consiste na inserção de defasagens entre do ângulo da tensão
do estator e da tensão terminal do DFIG utilizando-se o SGSC, visando a absorção de potência
da rede sem a alteração do módulo da tensão estatórica.
6 CONFIGURAÇÃO SÉRIE DO DFIG
82
No método proposto, como é necessário o desalinhamento do ângulo da tensão e corrente
do estator em relação à tensão da rede, potência reativa acaba sendo trocada. Desta forma, para
contornar o problema, esta estratégia requer sua aplicação em um par de turbinas ou um grupo
delas, onde as defasagens aplicadas possam ser implementadas com oposição de fase entre as
turbinas, de forma à permitir seu cancelamento.
Na Figura 58, duas formas de se efetuar o controle proposto são demonstradas. A primeira
consiste na defasagem apenas da tensão do estator utilizando-se do SGSC. A segunda utiliza-se
também da defasagem da corrente do estator por meio do RSC para minimizar a necessidade de
defasagem de tensão aplicada pelo SGSC, que pode ser problemática quando feita para ângulos
elevados, como será explicado posteriormente.
Defasagem de Tensão
Iestato =
r -0.7
2
Uestator=1,0 p.u.
5 p.u
.
PDFIG=-0.628 p.u.
PSGSC=0,072 p.u.
QDFIG=-0.362p.u.
PDFIG=-0.606 p.u.
PSGSC=0,094 p.u.
Pestator=-0.7 p.u.
QDFIG=-0.35p.u.
Pestator=-0.7 p.u.
Qestator=-0.188p.u.
195,00°
1 p.u.
USGSC=0,26
.u.
1,0 p
U DFIG=
15,00°
p.u.
Uestator=1,0 p.u.
0,518
U SGSC=
U DF
0°
Iestator=-0.7 p.u.
p.u
30,0
.
,0
=1
IG
Defasagem de Tensão e Corrente
Figura 58 - DFIG série - Exemplos dos controles por defasagem de tensão e por defasagem de tensão e
corrente.
Nota-se, através da Figura 58, que mantendo-se o alinhamento entre a tensão e corrente
do estator, porém, defasando-se ambas da tensão da rede, a potência ativa se torna menor nos
terminais do DFIG do que nos estator da máquina. Essa diferença de potência é absorvida
pelo SGSC. Apesar disso, observou-se que implementar grandes variações de ângulo na tensão
através do SGSC implica em deformações em sua forma senoidal. Este método é denominado,
na Figura 58, como Defasagem de Tensão.
Para evitar-se a deformação da forma de onda da tensão do estator, outra possibilidade é
defasar também a corrente em relação à tensão do estator, no sentido contrário à tensão da rede.
Isso possibilita que com menor grau de defasagem entre as tensões se consiga a mesma absorção
de potência. Vale ressaltar, neste caso, que a corrente do estator terá seu módulo aumentado para
que a potência ativa da máquina não seja alterada, não modificando o seu ponto de operação.
83
6.2 ABSORÇÃO DE POTÊNCIA PELO SGSC - MODO SUBSÍNCRONO
Este método é denominado, na Figura 58, como Defasagem de Tensão e Corrente.
Utilizando-se duas turbinas absorvendo potência através do SGSC, de forma que o ângulo
de defasagem utilizado seja o oposto entre elas, obtêm-se um cancelamento parcial da potência
reativa injetada na rede. Caso os pontos de operação das turbinas sejam diferentes este efeito
é reduzido. Desta forma, utiliza-se a componente d da tensão do SGSC, como feito no método
anterior, para variar a quantidade de potência que necessita ser absorvida por defasagem de
tensão e corrente, regulando assim a potência reativa entre as máquinas interligadas. O diagrama
de blocos do controle proposto para o SGSC é apresentado na Figura 59.
QPCC*=0
QPCC
+
-
UDFIGabc
+
+
-
UDFIG+d*
MSOGI
-FLL UDFIG+d
Vdc*
Vdc
PI
UDFIGabc
PI
ΔS
SSGSC +
+
+
PI
UDFIG+q +
MSOGI
-FLL
-
PI
PI
Usgsc+d*
dq0
Usgsc+q*
Usgsc+abc*
abc
ø
UDFIG+q*
SRSC
Figura 59 - DFIG série - Diagrama de blocos do controle de potência proposto.
Observa-se, através da Figura 59, que a componente q da tensão do SGSC é usada para o
controle da tensão do link DC. Após a comparação entre as potências aparentes do SGSC e do
RSC, soma-se o resultado ao ∆S, que consiste no erro entre a referência da tensão do barramento
DC e seu valor medido. Este sinal, após sua inserção em um controlador PI, define o valor de
referência para a componente q da tensão do DFIG.
Vale ressaltar que é utilizada a tensão do DFIG, e não a do estator da máquina, devido ao
plano d-q estar referenciado à tensão do estator, logo, a componente q desta variável é sempre
nula. Comparando-se a componente q medida da tensão do DFIG à sua referência, obtida como
descrito no parágrafo anterior, e inserindo-se o erro em um controlador PI, obtêm-se a tensão
de referência do SGSC que deve ser inserida no conversor.
A componente d da tensão do SGSC controla a diferença de fase entre as correntes das
duas turbinas, com o intuito de se obter a anulação da potência reativa no PCC. Variando-se
esta componente de tensão, tem-se a absorção ou injeção de potência ativa pelo SGSC, assim
como visto no método tradicional de controle de potência do DFIG série. Com isso, pode-se
modificar a necessidade de absorção de potência por parte do método de defasagem de tensão
e corrente de cada turbina e, desta forma, alcançar o cancelamento entre as potências reativas
6 CONFIGURAÇÃO SÉRIE DO DFIG
84
trocadas, mesmo quando elas operam com potências diferentes.
O método utilizado aplica defasagem de tensão e corrente, assim como exemplificado na
Figura 58. Logo, é necessário que se aplique um controle específico junto ao RSC para a manipulação do ângulo da corrente do estator. O diagrama de blocos deste controle é apresentado
na Figura 60.
P*(pu) +
-
PI
Ir+d*
P(pu)
-
Ird
Irabc
abc
dq0
Irq
-
ø
UDFIGabc
UDFIG+d
MSOGI
-FLL UDFIG+q
Is+d
Isabc
MSOGI
-FLL
Is+q
dq0
øUDFIG
ø
dq0
+ +
+
+
PI
PI
PI
Ur+d*
dq0
Ur+q*
Ur+abc*
abc
ø
Ir+q*
øIs
ø
Figura 60 - DFIG série - Diagrama de blocos do controle de sequência positiva do RSC.
A diferença do controle apresentado na Figura 60 para o controle tradicional do RSC está
na função da componente q. Neste caso, sua função é garantir que a componente de quadratura
da corrente do estator fique em oposição de fase com a componente em quadratura da tensão do
DFIG, utilizando-se como referência a tensão do estator. Para isto, utiliza-se blocos de cálculo
de ângulo para que se possa obter a defasagem de tensão imposta pelo SGSC e a defasagem
de corrente do estator. Após a comparação dos ângulos de defasagem, o erro é inserido em
um controlador PI para que se obtenha a referência para a componente q da corrente do rotor,
que será comparada à corrente medida para que, após sua inserção em um controlador PI, se
obtenha a tensão de referência para o RSC.
6.2.1
Modelagem, simulação e apresentação dos resultados
O sistema modelado é o mesmo da sessão anterior, assim como os dados do DFIG e seus
conversores. Porém, apenas duas turbinas são conectadas agora e possuem pontos de operação
diferentes. A velocidade do vento incidente na turbina 1 é de 12,5 m/s e na turbina 2 é de 13
m/s. Os resultados para as duas turbinas são apresentados de forma a demonstrar o controle de
defasagem de tensão e corrente, onde a oposição de potência reativa permite que apenas a parte
ativa seja encontrada no PCC, mesmo quando as turbinas operam com potências diferentes.
85
6.2 ABSORÇÃO DE POTÊNCIA PELO SGSC - MODO SUBSÍNCRONO
−0.45
Torque Eletromagnético
(p.u.)
Torque Eletromagnético
(p.u.)
O torque eletromagnético e a velocidade angular das turbinas são ilustrados na Figura 61.
−0.5
−0.55
−0.6
−0.65
−0.7
0
1
2
−0.45
−0.5
−0.55
−0.6
−0.65
3
−0.7
0
1
Tempo (s)
1
0.95
0.9
0.85
1
3
(b) Turbina 2 - Torque eletromagnético
Velocidade do rotor (p.u.)
Velocidade do rotor (p.u.)
(a) Turbina 1 - Torque eletromagnético
0.8
0
2
Tempo (s)
2
1
0.95
0.9
0.85
3
0.8
0
1
Tempo(s)
2
3
Tempo(s)
(c) Turbina 1 - Velocidade angular
(d) Turbina 2 - Velocidade angular
Figura 61 - DFIG série - Controle do SGSC - Te, wr.
Nota-se, através da Figura 61, que devido a maior velocidade do vento incidente, a turbina
2 opera em um ponto superior da curva de potência em relação à turbina 1. Seu torque eletromagnético e velocidade angular são 0.04 p.u. superiores ao da turbina 1. O que implicará em
potências diferentes a serem absorvidas pelos seus respectivos SGSC’s.
As tensões dos estatores das turbinas e dos terminais do DFIG’s são apresentadas na Figura
62. Vale ressaltar que a referência do plano d-q é a tensão do estator, logo, apesar da tensão do
estator ser modificada pelo SGSC, a variação de ângulo implementada pelo SGSC fica ilustrada
na tensão terminal do DFIG.
1
0.6
d
q
0.4
0.2
0
0
1
2
Tensão do estator
(p.u.)
Tensão do estator
(p.u.)
1
0.8
0.8
0.6
0.2
0
0
3
d
q
0.4
1
Tempo (s)
(a) Turbina 1 - Tensão do estator
1
0.6
0.4
d
q
0.2
0
−0.2
1
2
Tempo (s)
(c) Turbina 1 - Tensão terminal do DFIG
3
Tensão no DFIG
(p.u.)
1
Tensão no DFIG
(p.u.)
3
(b) Turbina 2 - Tensão do estator
0.8
−0.4
0
2
Tempo (s)
0.8
0.6
d
q
0.4
0.2
0
0
1
2
Tempo (s)
(d) Turbina 2 - Tensão terminal do DFIG
Figura 62 - DFIG série - Controle do SGSC - Tensão do estator e nos terminais do DFIG.
3
6 CONFIGURAÇÃO SÉRIE DO DFIG
86
Focando-se a atenção nas tensões dos estatores de ambas as turbinas, observa-se a pequena
variação no módulo necessária para que se possa equiparar o valor da componente q da corrente
de saída das turbinas, o que se faz modificando-se a potência que necessita de absorção pelo
controle de defasamento de tensão e corrente. Já as tensões terminais de ambas as turbinas,
ilustram a oposição de fase da defasagem implementada pelos respectivos SGSC’s.
As correntes do estator e rotor das máquinas são apresentadas na Figura 63.
−0.2
−0.3
d
q
−0.4
−0.5
−0.6
−0.7
0
1
2
Corrente do estator
(p.u.)
Corrente do estator
(p.u.)
−0.1
0.2
0
−0.4
−0.6
−0.8
0
3
d
q
−0.2
1
Tempo (s)
2
3
Tempo (s)
(a) Turbina 1 - Corrente do estator
(b) Turbina 2 - Corrente do estator
0.8
0.5
d
q
0.3
0.1
−0.1
−0.3
0
1
2
Corrente do rotor
(p.u.)
Corrente do rotor
(p.u.)
0.7
0.6
0.4
0.2
−0.2
−0.4
−0.6
0
3
d
q
0
1
Tempo (s)
2
3
Tempo (s)
(c) Turbina 1 - Corrente do rotor
(d) Turbina 2 - Corrente do rotor
Figura 63 - DFIG série - Controle do SGSC - Correntes do estator e rotor.
Observando-se as correntes estatóricas das turbinas, nota-se a sua defasagem em relação à
tensão do estator e sua oposição de fase em relação à tensão terminal do DFIG. Já nas Subfiguras
63c e 63d, observa-se as correntes rotóricas e os ângulos implementados pelos RSC’s para o
controle das correntes dos estatores.
A corrente e tensão no PCC, agora com o plano d-q referenciado à tensão do próprio PCC,
são ilustradas na Figura 64.
0.1
0.8
0.6
d
q
0.4
0.2
0
0
Corrente no PCC
(p.u.)
Tensão no PCC
(p.u.)
1
0
−0.1
−0.2
d
q
−0.3
−0.4
−0.5
−0.6
1
2
3
0
1
Tempo (s)
(a) PCC - Tensão
2
3
Tempo (s)
(b) PCC - Corrente
Figura 64 - DFIG série - Controle do SGSC - Tensão e corrente no PCC.
A Figura 64 mostra que o método de oposição de fases das correntes de ambas as turbinas
atingiu seu objetivo, pois no PCC a corrente não apresenta componente em quadratura, estando
87
6.2 ABSORÇÃO DE POTÊNCIA PELO SGSC - MODO SUBSÍNCRONO
defasada em 180 graus e relação à tensão do PCC, o que está de acordo com a definição de
gerador.
0.6
Potência do estator
(p.u.)
Potência do estator
(p.u.)
As potências dos estatores das máquinas e nos terminais dos DFIG’s são apresentadas na
Figura 65.
0.4
PS
0.2
QS
0
−0.2
0
1
2
0.6
0.5
PS
0.4
Q
0.3
S
0.2
0.1
0
0
3
1
2
Tempo (s)
(a) Turbina 1 - Potência do estator
(b) Turbina 2 - Potência do estator
0.6
Potência do DFIG
(p.u.)
Potência do DFIG
(p.u.)
0.6
0.4
0.2
PDFIG
0
QDFIG
−0.2
−0.4
0
3
Tempo (s)
1
2
0.5
PDFIG
0.4
QDFIG
0.3
0.2
0
3
1
2
Tempo (s)
3
Tempo (s)
(c) Turbina 1 - Potência do DFIG
(d) Turbina 2 - Potência do DFIG
Figura 65 - DFIG série - Controle do SGSC - Potências do estator e do DFIG.
Nota-se, através da Figura 65, que as potências ativas são maiores nos estatores do que nos
terminais dos DFIG’s, o que mostra a absorção de potência pelo SGSC. Percebe-se também
que a variação de potência entre o estator e os terminais do DFIG é ligeiramente maior na
turbina 1. Isto se deve ao ponto de operação desta turbina, onde o escorregamento é maior, e
consequentemente a potência demandada pelo RSC. Focando-se nas potências reativas, pode-se
notar a sua inversão do sentido entre as turbinas 1 e 2. A potência no PCC, onde deseja-se que
a parte reativa seja anulada, é ilustrada na Figura 66.
Potência no PCC
(p.u.)
0.6
0.5
0.4
0.3
PPCC
0.2
QPCC
0.1
0
−0.1
0
1
2
3
Tempo (s)
Figura 66 - DFIG série - Controle do SGSC - Potências ativa e reativa no PCC.
Finalmente, através da Figura 66, visualiza-se o resultado final da soma das potências ativas
e reativas. Pode-se observar a potência ativa total após a sua absorção parcial por parte dos
conversores série. Nota-se também a anulação das componentes de potência reativa, o que
mostra a efetividade da estratégia proposta para este fim.
6 CONFIGURAÇÃO SÉRIE DO DFIG
88
A potências aparentes dos SGSC’s são ilustradas na Figura 67.
0.15
Potência do SGSC
(p.u.)
Potência do SGSC
(p.u.)
0.2
0.19
0.18
0.17
0.16
0.15
0
1
2
0.1
0.05
0
0
3
Tempo (s)
1
2
3
Tempo (s)
(a) Turbina 1 - Potência do SGSC
(b) Turbina 2 - Potência do SGSC
Figura 67 - DFIG série - Controle do SGSC - Potências nos SGSC’s.
Na Figura 67, observa-se as potência absorvidas pelos conversores série de cada turbina.
Como o escorregamento da turbina 2 é menor, a potência requerida pelo RSC, e consequentemente a potência absorvida pelo SGSC, é menor.
As tensões nos links DC são apresentadas na Figura 68, onde pode-se perceber que a troca
de potência por defasagem de tensão e corrente permite a manutenção da tensão do barramento
DC no seu valor de referência.
1.01
Tensão no Link DC
(p.u.)
Tensão no Link DC
(p.u.)
1.01
1.005
1
0.995
0.99
1
2
3
1.005
1
0.995
0.99
1
Tempo (s)
(a) Turbina 1 - Tensão do link DC
2
3
Tempo (s)
(b) Turbina 2 - Tensão do link DC
Figura 68 - DFIG série - Controle do SGSC - Tensões dos links DC.
6.3
ATUAÇÃO CONJUNTA DOS CONTROLES PROPOSTOS
Nesta etapa, o DFIG série além de operar no modo subsíncrono de forma adequada, contornando sua principal limitação, também deve ser capaz de compensar o desequilíbrio de tensão
no PCC.
Agora, ambos os controles propostos operam conjuntamente, onde, o controle de absorção
de potência do SGSC é feito, no modo subsíncrono, pelo controle de sequência positiva do
SGSC, que aplica o método de defasagem de tensão e corrente. A compensação do desequilíbrio
de tensão no PCC ocorre utilizando-se os controles de sequência negativa do RSC e SGSC.
Onde, o RSC é responsável pela corrente injetada através do estator da máquina e o SGSC pela
compensação das oscilações no torque eletromagnético por meio da manipulação da tensão do
estator.
89
6.3 ATUAÇÃO CONJUNTA DOS CONTROLES PROPOSTOS
6.3.1
Modelagem, simulação e apresentação dos resultados
Devido ao elevado esforço computacional para se modelar diversas turbinas com controles
independentes, a modelagem e simulação incluíram apenas duas turbinas, assim como na seção
anterior, conectadas ao mesmo sistema elétrico utilizado em todos os capítulos.
Os dados do DFIG são os mesmos utilizados nas seções anteriores deste capítulo, sendo
alteradas apenas nas estratégias de controle implementadas.
Novamente, a velocidade do vento incidente na turbina 1 é de 12,5 m/s e na turbina 2 é de
13 m/s. O desequilíbrio de tensão induzido na fonte de tensão controlada tem seu VUF reduzido
para 1,5% neste caso, devido a capacidade de compensação de apenas duas turbinas.
Os resultados obtidos são apresentados divididos em dois períodos com estratégias de controle distintas. São eles:
• Primeiro período (0 a 2s) - Um desequilíbrio com VUF de 1,5% é induzido na fonte de
tensão controlada.
• Segundo período (2 a 6s) - Os controles de sequência negativa do RSC e SGSC são
ativados de forma a compensar o desequilíbrio de tensão no PCC e inibir as oscilações no
torque eletromagnético.
−0.3
Torque Eletromagnético
(p.u.)
Torque Eletromagnético
(p.u.)
A Figura 69 traz o torque eletromagnético e a velocidade angular do rotor de ambas as
turbinas.
−0.4
−0.5
−0.6
−0.7
−0.8
0
1
2
3
4
5
6
−0.4
−0.5
−0.6
−0.7
−0.8
−0.9
0
1
2
Tempo (s)
1
0.95
0.9
0.85
1
2
3
5
6
4
5
6
5
6
1
0.95
0.9
0.85
0.8
0
Tempo(s)
(c) Turbina 1 - Velocidade angular
4
(b) Turbina 2 - Torque eletromagnético
Velocidade do rotor (p.u.)
Velocidade do rotor (p.u.)
(a) Turbina 1 - Torque eletromagnético
0.8
0
3
Tempo (s)
1
2
3
4
Tempo(s)
(d) Turbina 2 - Velocidade angular
Figura 69 - DFIG série - Controles propostos ativos - Te, wr.
Primeiramente, observando-se a Figura 69, observa-se o ponto de operação mais elevado da
turbina 2, que opera com maior torque eletromagnético e mais próxima de velocidade síncrona.
6 CONFIGURAÇÃO SÉRIE DO DFIG
90
Em segundo lugar, observando-se o torque eletromagnético nas Subfiguras 69a e 69b, percebese a redução em suas oscilações no segundo período, quando o controle de sequência negativa
do SGSC está ativo.
1
0.8
0.6
d
q
0.4
0.2
0
0
1
2
3
4
5
Tensão do estator − S.P.
(p.u.)
Tensão do estator − S.P.
(p.u.)
As tensões no estator e nos terminais do DFIG, de ambas as turbinas, são ilustradas na
Figura 70.
6
1
0.8
0.6
d
q
0.4
0.2
0
0
1
2
Tempo (s)
0.2
0.1
d
q
0
−0.1
1
2
3
4
5
6
0.2
0.1
0.05
d
q
0
−0.05
−0.1
−0.15
0
1
2
0.6
0.4
d
q
0.2
0
−0.2
4
5
Tensão no DFIG − S.P.
(p.u.)
Tensão no DFIG − S.P.
(p.u.)
1
3
0.6
d
q
0.4
0.2
1
2
0.005
0
−0.005
−0.01
4
5
Tempo (s)
(g) Turbina 1 - Tensão terminal do DFIG - S.N.
6
Tensão no DFIG − S.N.
(p.u.)
Tensão no DFIG − S.N.
(p.u.)
3
4
5
6
(f) Turbina 2 - Tensão terminal do DFIG - S.P.
d
q
0.01
3
6
Tempo (s)
0.015
2
5
1
0
0
6
(e) Turbina 1 - Tensão terminal do DFIG - S.P.
1
4
0.8
Tempo (s)
−0.015
0
3
(d) Turbina 2 - Tensão do estator - S.N.
0.8
2
6
Tempo (s)
(c) Turbina 1 - Tensão do estator - S.N.
1
5
0.15
Tempo (s)
−0.4
0
4
(b) Turbina 2 - Tensão do estator - S.P.
Tensão do estator − S.N.
(p.u.)
Tensão do estator − S.N.
(p.u.)
(a) Turbina 1 - Tensão do estator - S.P.
−0.2
0
3
Tempo (s)
0.015
0.01
d
q
0.005
0
−0.005
−0.01
−0.015
0
1
2
3
4
5
6
Tempo (s)
(h) Turbina 2 - Tensão terminal do DFIG - S.N.
Figura 70 - DFIG série - Controles propostos ativos - Tensões do estator e nos terminais do DFIG.
Na Figura 70, observando-se inicialmente a tensão de sequência positiva do estator das turbinas, percebe-se que a variação da componente d, para equilibrar o defasamento das correntes
de ambas as turbinas no PCC, de forma que as potências reativas se anulem, é bastante pequeno
neste caso. Já, observando-se a tensão de sequência negativa do estator, percebe-se no segundo
período, o valor necessário para se anular as oscilações do torque eletromagnético.
As tensões de sequência positiva nos terminais dos DFIG’s, referenciadas aos estatores
91
6.3 ATUAÇÃO CONJUNTA DOS CONTROLES PROPOSTOS
das máquinas, mostram a variação de angulo necessário para a absorção de potência por parte
do SGSC, onde as defasagens são feitas em sentidos opostos para cada turbina. As tensões
de sequência negativa nos terminais das turbinas demonstram a redução do desequilíbrio de
tensão no PCC, já que as componentes de sequência negativa se propagam do PCC, através do
transformador, para os terminais dos DFIG’s.
0
Corrente do estator − S.P.
(p.u.)
Corrente do estator − S.P.
(p.u.)
A Figura 71 ilustra as correntes nos estatores e rotores das máquinas.
−0.2
d
q
−0.4
−0.6
−0.8
0
1
2
3
4
5
6
0.2
0
−0.2
d
q
−0.4
−0.6
−0.8
0
1
2
Tempo (s)
0.2
0.1
d
q
0
−0.1
1
2
3
4
5
6
0.1
d
q
0
−0.1
0
1
2
0.4
d
q
0.2
0
4
5
Corrente do rotor − S.P.
(p.u.)
Corrente do rotor − S.P.
(p.u.)
0.6
3
0.4
0.2
d
q
0
−0.2
−0.4
1
2
0
d
q
−0.05
−0.1
−0.15
4
Tempo (s)
(g) Turbina 1 - Corrente do rotor - S.N.
5
6
Corrente do rotor − S.N.
(p.u.)
Corrente do rotor − S.N.
(p.u.)
3
4
5
6
(f) Turbina 2 - Corrente do rotor - S.P.
0.1
3
6
Tempo (s)
0.05
2
5
0.6
−0.6
0
6
(e) Turbina 1 - Corrente do rotor - S.P.
1
4
0.8
Tempo (s)
−0.2
0
3
(d) Turbina 2 - Corrente do estator - S.N.
0.8
2
6
Tempo (s)
(c) Turbina 1 - Corrente do estator - S.N.
1
5
0.2
Tempo (s)
−0.2
0
4
(b) Turbina 2 - Corrente do estator - S.P.
Corrente do estator − S.N.
(p.u.)
Corrente do estator − S.N.
(p.u.)
(a) Turbina 1 - Corrente do estator - S.P.
−0.2
0
3
Tempo (s)
0.1
0.05
0
d
q
−0.05
−0.1
−0.15
−0.2
0
1
2
3
4
5
6
Tempo (s)
(h) Turbina 2 - Corrente do rotor - S.N.
Figura 71 - DFIG série - Controles propostos ativos - Correntes do estator e rotor.
Observando-se a Figura 71, vale ressaltar a inversão de sentido das componentes q das
correntes de sequência positiva dos estatores das turbinas 1 e 2, o que permite sua anulação
quando somadas junto ao PCC. Já as correntes de sequência negativa dos estatores, em seu
segundo período, adquirem o valor necessário para a compensação do desequilíbrio de tensão.
Analisando-se as componentes de sequência positiva da corrente do rotor, observa-se que o
6 CONFIGURAÇÃO SÉRIE DO DFIG
92
sentido da defasagem de corrente do estator da turbina 2 requer uma componente em quadratura
maior, o que resulta em um módulo maior de corrente fluindo no rotor da máquina. Isto se deve
à característica indutiva da máquina de indução, sendo que o sentido de defasagem de corrente
da máquina da turbina 2 é capacitivo.
0.01
1
0.8
0.6
d
q
0.4
0.2
0
0
1
2
3
4
5
6
Tensão no PCC − S.N.
(p.u.)
Tensão no PCC − S.P.
(p.u.)
A Figura 72 ilustra a tensão e corrente no PCC, agora com o plano d-q referenciado a tensão
do próprio PCC.
d
q
0.005
0
−0.005
−0.01
−0.015
0
1
2
Tempo (s)
0
−0.1
−0.2
d
q
−0.3
−0.4
−0.5
−0.6
1
2
4
5
6
(b) PCC - Tensão - S.N.
3
4
5
6
0.15
Corrente no PCC − S.N.
(p.u.)
Corrente no PCC − S.P.
(p.u.)
(a) PCC - Tensão - S.P.
0
3
Tempo (s)
0.1
d
q
0.05
0
−0.05
0
1
2
Tempo (s)
3
4
5
6
Tempo (s)
(c) PCC - Corrente - S.P.
(d) PCC - Corrente - S.N.
Figura 72 - DFIG série - Controles propostos ativos - Tensão e corrente no PCC.
Observando-se a Figura 72, vale ressaltar o cancelamento das componentes de quadratura
das correntes de sequência positiva de ambas as turbinas, restando apenas a componente de eixo
direto. Observa-se também, analisando-se as componentes de sequência negativa de tensão e
corrente, a anulação do desequilíbrio de tensão no segundo período, e a corrente de sequência
negativa necessária para que este fenômeno ocorra.
A Figura 73 apresenta as potências nos estatores das máquinas. Visualizado-se a potência
reativa, observa-se a redução das oscilações no segundo período. Já a potência ativa sofre o
efeito inverso.
1
PS
Potência do estator
(p.u.)
Potência do estator
(p.u.)
1
PSDC
0.5
QS
QSDC
0
−0.5
0
1
2
3
Tempo (s)
(a) Turbina 1 - Potência do estator
4
5
6
0.8
0.6
PS
PSDC
QS
QSDC
0.4
0.2
0
0
1
2
3
Tempo (s)
(b) Turbina 2 - Potência do estator
Figura 73 - DFIG série - Controles propostos ativos - Potência do estator da máquina.
4
5
6
93
6.3 ATUAÇÃO CONJUNTA DOS CONTROLES PROPOSTOS
Focando-se nas potências reativas nos terminais dos DFIG’s, apresentadas na Figura 74,
nota-se a complementaridade entre os valores contínuos apresentados por ambas as turbinas. O
que permite seu cancelamento quando somadas junto ao PCC.
0.6
0.4
0.2
0.8
P
P
DFIG
P
DFIG
Potência do DFIG
(p.u.)
Potência do DFIG
(p.u.)
0.8
DC
DFIG
QDFIG
Q
DC
DFIG
0
−0.2
−0.4
−0.6
0
1
2
3
4
5
P
DC
DFIG
0.6
QDFIG
Q
0.4
DC
DFIG
0.2
0
0
6
1
2
3
Tempo (s)
4
5
6
Tempo (s)
(a) Turbina 1 - Potência do DFIG
(b) Turbina 2 - Potência do DFIG
Figura 74 - DFIG série - Controles propostos ativos - Potência nos terminais do DFIG.
As potências ativa e reativa no PCC são apresentadas na Figura 75. Nela, observa-se a
ausência de potência reativa e o valor das potências ativa de ambas as turbinas somadas.
Potência no PCC
(p.u.)
0.6
PPCC
PPCCDC
0.4
QPCCDC
Q
0.2
DC
PCC
0
−0.2
0
1
2
3
4
5
6
Tempo (s)
Figura 75 - DFIG série - Controles propostos ativos - Potências ativa e reativa no PCC.
0.1
0
Potência reativa do SGSC
(p.u.)
Potência ativa do SGSC
(p.u.)
As potências ativa e reativa dos SGSC’s das turbinas 1 e 2 são apresentadas na Figura 76.
PSGSC
PSGSCDC
−0.1
−0.2
−0.3
0
1
2
3
4
5
6
0
QSGSC
−0.05
QSGSCDC
−0.1
−0.15
−0.2
−0.25
−0.3
−0.35
0
1
2
Tempo (s)
0.1
0
PSGSC
PSGSCDC
−0.05
−0.1
−0.15
−0.2
−0.25
0
1
2
3
4
5
6
(b) Turbina 1 - Potência reativa do SGSC
Potência reativa do SGSC
(p.u.)
Potência ativa do SGSC
(p.u.)
(a) Turbina 1 - Potência ativa do SGSC
0.05
3
Tempo (s)
4
5
6
0.25
0.2
QSGSC
QSGSCDC
0.15
0.1
0.05
0
0
1
2
Tempo (s)
(c) Turbina 2 - Potência ativa do SGSC
3
4
Tempo (s)
(d) Turbina 2 - Potência reativa do SGSC
Figura 76 - DFIG série - Controles propostos ativos - Potências dos SGSC’s.
5
6
6 CONFIGURAÇÃO SÉRIE DO DFIG
94
Na Figura 76 nota-se no segundo período de todas as Subfiguras um aumento de valores,
devido aos controles de sequência negativa demandarem potência adicional. Além disso, estes controles impõem oscilações tanto na potência ativa como reativa dos conversores série de
ambas as turbinas.
0.4
0.3
Potência aparente do RSC
(p.u.)
Potência aparente do RSC
(p.u.)
A potência aparente dos RSC’s de ambas as turbinas são apresentadas na Figura 77. Nela,
nota-se o aumento da componente contínua de potência, e também, o surgimento das componentes oscilantes, devido aos controles de sequência negativa.
SRSC
SRSCDC
0.2
0.1
0
0
1
2
3
4
5
6
0.4
0.3
SRSC
SRSCDC
0.2
0.1
0
0
1
2
Tempo (s)
3
4
5
6
Tempo (s)
(a) Turbina 1 - Potência aparente do RSC
(b) Turbina 2 - Potência aparente do RSC
Figura 77 - DFIG série - Controles propostos ativos - Potência aparente dos RSC’s.
Finalmente, na Figura 78, as tensões nos links DC são apresentadas. Nela, nota-se para ambas as turbinas um breve afundamento devido a entrada de operação dos controles de sequência
negativa.
1.0005
Tensão no Link DC
(p.u.)
Tensão no Link DC
(p.u.)
1.0005
1
0.9995
0.999
1
2
3
4
5
6
1
0.9995
0.999
0.9985
1
2
3
Tempo (s)
(a) Turbina 1 - Tensão do link DC
4
5
6
7
8
Tempo (s)
(b) Turbina 2 - Tensão do link DC
Figura 78 - DFIG série - Controles propostos ativos - Tensões dos links DC.
6.4
CONSIDERAÇÕES
Neste capítulo, na primeira seção, foram apresentados os controles propostos para o RSC
e SGSC, de forma a permitir a compensação do desequilíbrio de tensão no PCC utilizando-se
a configuração série do DFIG. Na segunda seção, apresentou-se a solução proposta para esta
configuração do DFIG operando no modo subsíncrono, almejando evitar a saturação do fluxo
concatenado, que é o fator limitante do método tradicional, devido à elevação da tensão do
estator. Na terceira seção, apresentou-se o controle completo, com o DFIG série operando com
todos os controles propostos associados.
6.4 CONSIDERAÇÕES
95
Na primeira seção, mostrou-se que o método para injeção de corrente de sequência negativa
pelo estator da máquina foi eficaz, compensado o desequilíbrio de tensão no PCC e mantendo as
oscilações do torque eletromagnético sob controle, mesmo que com menor capacidade de compensação se comparado a estratégia coordenada para a configuração do DFIG com conversor
série associado apresentada no capítulo anterior.
Na segunda seção, a estratégia de absorção de potência através do SGSC pelo método
de defasagem de tensão e corrente foi apresentado. O método inicialmente consistia apenas
na defasagem de tensão. Porém, foi reformulado, pois para ângulo elevados de defasagem,
necessários para a máquina operando sob valores elevados de escorregamento, o SGSC impunha
deformações na tensão do estator da máquina. Utilizando-se a defasagem de tensão e corrente
foi possível utilizar menores ângulos de defasagem de tensão e o problema foi contornado.
Utilizar o método já citado na literatura para absorção de potência pelo SGSC apenas para
equilibrar as potências de ambas as turbinas que necessitam de absorção pelo método de defasagem de tensão e corrente, de forma que as potências reativas residuais tenham módulos iguais e
sejam canceladas quando somadas no PCC, foi eficaz e permite que se obtenha valores unitários
de fator de potência quando utilizados pares ou grupos de turbinas.
Na terceira seção, a operação com ambos os controles propostos foi simulada, demonstrando que o objetivo desta tese foi alcançado. Neste caso, foi possível a operação do DFIG
série no modo subsíncrono sem sobretensão no estator da máquina, e também a injeção de
corrente de sequência negativa compensando o desequilíbrio de tensão no PCC. Os controles
operaram de forma adequada sem violar os limites de potência dos conversores e também com
as oscilações de tensão do barramento DC sob controle.
96
6 CONFIGURAÇÃO SÉRIE DO DFIG
97
7
CONCLUSÕES
Dado o crescimento do uso da energia eólica em todo o mundo e o crescente aumento dos
requisitos dos geradores eólicos por parte dos operadores do sistema, nesta tese de doutorado
foi desenvolvida uma metodologia de controle aplicada a geradores de indução duplamente
alimentados (DFIG) empregados em geração eólica para a compensação de desequilíbrios de
tensão. São considerados o DFIG em sua configuração tradicional, o DFIG com o conversor
série associado em uma configuração de três conversores, e o DFIG série, onde o conversor
série substitui o conversor do lado da rede em uma configuração de dois conversores.
Nos controles implementados junto ao DFIG em sua configuração padrão, replicados dos
métodos propostos na literatura, observou-se os efeitos do desequilíbrio de tensão sobre os parâmetros de operação da máquina, podendo-se apenas controlar através do RSC um parâmetro
operacional por vez, o que em algumas situações mostrou impactar negativamente nos parâmetros não controlados. Já em uma estratégia combinada entre o RSC e GSC, é possível utilizar
o conversor do lado da rede para injetar corrente de sequência negativa na rede e compensar o
desequilíbrio de tensão, enquanto o RSC compensa eventuais oscilações de torque na máquina
oriundas de resíduos de desequilíbrio. Esta estratégia se mostra capaz de compensar todos os
parâmetros da máquina simultaneamente, pelo reequilíbrio da tensão do estator e ainda evitar
os efeitos do desequilíbrio sobre eventuais cargas conectadas ao PCC.
A metodologia de compensação de desequilíbrios de tensão para o DFIG com conversor
série associado, em uma configuração de 3 conversores, foi proposta de forma a aproveitar não
só a maior capacidade de lidar com distúrbios de tensão, mas também utilizar da presença do
terceiro conversor para estender a capacidade do DFIG em compensar o desequilíbrio de tensão
no ponto de conexão com a concessionária (PCC). Esta extensão da capacidade de injeção de
corrente de sequência negativa se deve a uma estratégia de controle coordenada que utiliza os 3
conversores simultaneamente.
Verificou-se, através dos resultados, que esta configuração do DFIG apresentou o maior potencial de compensação de desequilíbrios de tensão. Além disso, pela possibilidade de absorção
de potência através do SGSC, outros controles podem ser implementados sem o limite imposto
pela potência residual do GSC. O grau de isolamento da tensão do estator em relação à tensão
da rede possibilita a operação balanceada da máquina de indução sem qualquer compensação
do lado da rede, quando não há essa necessidade. Como desvantagem, tem-se o custo de se
implementar o conversor extra e o aumento de complexidade de se operar com um conversor
adicional.
98
7 CONCLUSÕES
A utilização da configuração série do DFIG para compensar desequilíbrios de tensão no
PCC visa unir a capacidade de isolar a tensão do estator em relação à tensão da rede, vista
na configuração com conversor série associado, beneficiando-se de todas as vantagens desse
isolamento, ao menor custo e menor complexidade de uma configuração com dois conversores
e ainda possibilitar ao DFIG série compensar desequilíbrios de tensão junto à rede elétrica.
Para isto, primeiramente era necessário o desenvolvimento de um método de absorção de
potência através do SGSC que permitisse ao DFIG série operar em toda a faixa de operação
subsíncrona do DFIG tradicional. Inicialmente, a proposta de utilizar a defasagem de tensão
do estator, implementada através de tensões induzidas no SGSC, se mostrou limitada quando
os resultados mostraram que para ângulos elevados de defasagem de tensão o SGSC promovia
deformações na forma de onda do estator. A solução encontrada foi não defasar apenas tensão
do estator mas também sua corrente, possibilitando assim a absorção de potência necessária
sem qualquer efeito colateral à máquina de indução.
Porém, o método apresentado para absorção de potência pelo SGSC implica obrigatoriamente em troca de potência reativa com a rede. Para contornar esse efeito, trabalhou-se com
pares de turbinas que poderiam ter seu controle de defasagem feitos em sentido inverso obtendo o cancelamento da potência reativa. Ainda assim, dificilmente as potências de ambos
os conversores, e consequentemente a potência reativa trocada por ambas as turbinas, teriam
módulos iguais. Desta forma, utilizou-se o controle padrão de troca de potência do SGSC, onde
o módulo da tensão é alterado, apenas para equilibrar as potências que deveriam ser trocadas
pelo novo método em ambos os conversores, possibilitando assim o cancelamento da componente de potência reativa sem implicar em grandes alterações da tensão do estator da máquina.
Os resultados validaram a metodologia proposta, possibilitando a operação do DFIG no modo
subsíncrono mesmo sob a presença de elevados valores de escorregamento.
Além disso, era necessário o desenvolvimento de um método de injeção de corrente de
sequência negativa para o DFIG série, já que, neste caso, não há mais o conversor do lado da
rede conectado em paralelo para a injeção direta de corrente. A solução foi utilizar o RSC para
controlar a corrente de sequência negativa injetada pelo estator da máquina e obter uma forma
de contornar as oscilações no torque eletromagnético que esse método promove. Para isto,
verificou-se através das equações das componentes oscilantes da potência eletromagnética da
máquina que era possível encontrar um valor para a tensão de sequência negativa do estator, de
acordo com a corrente de sequência negativa do rotor, onde as oscilações são eliminadas. Desta
forma, utilizou-se estes valores como referência para a tensão de sequência negativa no estator,
induzindo-as por meio da manipulação de tensão pelo SGSC, e os resultados das simulações
comprovaram a eficiência do método.
Este método de injeção de corrente de sequência negativa pelo estator da máquina já foi o
utilizado no DFIG com conversor série associado, no capítulo cinco, como controle adicional
7.1 TRABALHOS FUTUROS
99
em uma estratégia coordenada para a extensão da compensação do desequilíbrio de tensão.
Essas simulações já serviram como plataforma de testes antes de sua implementação no DFIG
série, que também apresentou a performance esperada.
Na ultima etapa, os controles propostos foram implementados e simulados conjuntamente.
Onde, de acordo com os resultados, o controle de absorção de potência do SGSC foi capaz
de suprir as necessidades dos controles de sequência positiva e negativa implementados. Já o
controle de injeção de corrente de sequência negativa foi capaz de compensar o desequilíbrio
de tensão no PCC sem comprometer as oscilações de torque.
Apesar dos resultados mostrarem que o DFIG série possui a menor capacidade para a compensação de desequilíbrios de tensão entre as três configurações testadas, sua melhor capacidade
de lidar com distúrbios de tensão, quando comparado à configuração tradicional do DFIG, e seu
menor custo de implementação e menor complexidade de operação, quado comparado ao DFIG
com conversor série associado, faz com que esta se mostre uma configuração atrativa. Seu potencial de utilização é elevado quando consideradas redes mais fracas, onde distúrbios de tensão
são causas frequentes de desconexão das turbinas, permitindo assim não só a continuidade de
operação do gerador, mas também a compensação do desequilíbrio no ponto de conexão.
7.1
TRABALHOS FUTUROS
Como continuação do trabalho desenvolvido nesta Tese pode-se citar algumas frentes de
pesquisa:
• A extensão do método de compensação para as tensões harmônicas de ordem mais baixa
e também a mitigação dos seus efeitos sobre o gerador. As harmônicas de quinta e sétima
ordem são abordadas na literatura como as que possuem maior influência na operação do
gerador e, portanto, requerem controles de mitigação dos seus efeitos sobre a máquina
e/ou sua compensação (XU; HU; HE, 2012; HU; XU; HE, 2013; XU et al., 2012).
• A implementação dos controles propostos para configuração série do DFIG em máquinas
reais, permitindo analisar a influência da saturação na operação da máquina durante a
aplicação destes controles.
• A associação do modelo de uma rede com baixa penetração de fontes síncronas com
geradores eólicos distribuídos ao longo de seu extensão, de forma a analisar a efetividade
da manutenção dos parâmetros da qualidade de energia por serviços ancilares prestados
por geradores eólicos distribuídos nas suas diferentes configurações de geradores elétricos
possíveis.
100
7 CONCLUSÕES
101
REFERÊNCIAS
ABAD, G.; LOPEZ, J.; RODRÍGUEZ, M.; MARROYO, L.; IWANSKI, G. Doubly fed
induction machine: modeling and control for wind energy generation. [S.l.]: John Wiley &
Sons, 2011.
ACKERMANN, T. Wind power in power systems. [S.l.]: John Wiley & Sons, 2005.
AKHMATOV, V. Variable-speed wind turbines with doubly-fed induction generators, part i:
Modelling in dynamic simulation tools. Wind Engineering, Multi Science Publishing, v. 26,
n. 2, p. 85–108, 2002.
ALEXANDERSON, E. Control applications of the transistor. Proceedings of the IRE, v. 40,
n. 11, p. 1508–1511, Nov 1952. ISSN 0096-8390.
ALLEN, M. R.; BARROS, V. R.; BROOME, J.; CRAMER, W.; CHRIST, R.; CHURCH, J. A.;
CLARKE, L.; DAHE, Q.; DASGUPTA, P.; DUBASH, N. K. Ipcc fifth assessment synthesis
report-climate change 2014 synthesis report. Intergovernmental Panel on Climate Change
(IPCC), 2014.
ASSOCIATION, E. W. E. et al. Wind energy-the facts: a guide to the technology, economics
and future of wind power. [S.l.]: Routledge, 2012.
BADRZADEH, B.; GUPTA, M. Power system harmonic analysis in wind power plants?part ii:
Practical experiences and mitigation methods. In: IEEE. Industry Applications Society Annual
Meeting (IAS), 2012 IEEE. [S.l.], 2012. p. 1–8.
BEHREND, B. A. The induction motor and other alternating current motors: their theory and
principles of design. [S.l.]: McGraw-Hill, 1921.
BERNDT, M.; SCHMITZ, N. Derating of polyphase induction motors operated with
unbalanced line voltages. Transactions of the American Institute of Electrical Engineers. Part
III: Power Apparatus and Systems, v. 3, n. 81, p. 680–683, 1962.
BLALOCK, T. J. Electrification of a major steel mill part 5: Scherbius and kraemer drives
[history]. IEEE Industry Applications Magazine, v. 4, n. 13, p. 8–11, 2007.
BREKKEN, T.; MOHAN, N. A novel doubly-fed induction wind generator control scheme
for reactive power control and torque pulsation compensation under unbalanced grid voltage
conditions. In: IEEE. Power Electronics Specialist Conference, 2003. PESC’03. 2003 IEEE
34th Annual. [S.l.], 2003. v. 2, p. 760–764.
BREKKEN, T. K.; MOHAN, N. Control of a doubly fed induction wind generator under
unbalanced grid voltage conditions. Energy Conversion, IEEE Transactions on, IEEE, v. 22,
n. 1, p. 129–135, 2007.
102
REFERÊNCIAS
CARLIN, P. W.; LAXSON, A. S.; MULJADI, E. The history and state of the art of
variable-speed wind turbine technology. Wind Energy, Wiley Online Library, v. 6, n. 2, p.
129–159, 2003.
DIVONE, L. V. Evolution of modern wind turbines part a: 1940 to 1994. In: Wind Turbine
Technology: Fundamental Concepts in Wind Turbine Engineering, Second Edition. [S.l.]:
ASME Press, 2009.
DUTRA, R.; SZKLO, A.; TOLMASQUIM, M. Experiência de políticas para o
desenvolvimento de mercados eólicos, perspectivas e transformações no parque gerador de
energia elétrica brasileiro. In: Coletânea de artigos: energia solar e eólica. v. 2. [S.l.: s.n.],
2006. p. 203 –216.
ENERGY, U. D. of. WindVision: A New Era for Wind Power in the United States. [S.l.], 2015.
Disponível em: <http://www.energy.gov/sites/prod/files/WindVision Report final.pdf>.
Acesso em: 06 Ago. 2015.
EPE. Balanço Energético Nacional 2013: Ano base 2012. [S.l.], 2013. Disponível em:
<https://ben.epe.gov.br/downloads/Relatorio Final BEN 2013.pdf>. Acesso em: 14 Abr.
2014.
EPE. Balanço Energético Nacional 2015: Ano base 2014. [S.l.], 2015. Disponível em:
<https://ben.epe.gov.br/downloads/Relatorio Final BEN 2015.pdf>. Acesso em: 01 Abr.
2016.
EWEA. Wind Energy scenarios for 2020: A report by the European Wind Energy Association. [S.l.], 2014. Disponível em:
<http://www.ewea.org/fileadmin/files/library/publications/reports/EWEA-Wind-energyscenarios-2020.pdf>. Acesso em: 03 Ago. 2015.
FAIZ, J.; EBRAHIMPOUR, H. Precise derating of three-phase induction motors with
unbalanced voltages. In: IEEE. Industry Applications Conference, 2005. Fourtieth IAS Annual
Meeting. Conference Record of the 2005. [S.l.], 2005. v. 1, p. 485–491.
FAN, L.; YIN, H.; KAVASSERI, R. Negative sequence compensation techniques of dfig-based
wind energy systems under unbalanced grid conditions. In: IEEE. Power Electronics and
Machines in Wind Applications, 2009. PEMWA 2009. IEEE. [S.l.], 2009. p. 1–6.
FITZER, C.; ARULAMPALAM, A.; BARNES, M.; ZUROWSKI, R. Mitigation of saturation
in dynamic voltage restorer connection transformers. Power Electronics, IEEE Transactions
on, IEEE, v. 17, n. 6, p. 1058–1066, 2002.
FLANNERY, P.; VENKATARAMANAN, G. A grid fault tolerant doubly fed induction
generator wind turbine via series connected grid side converter. In: WINDPOWER 2006
Conference, June. [S.l.: s.n.], 2006. p. 4–7.
FLANNERY, P. S.; VENKATARAMANAN, G. Evaluation of voltage sag ride-through of a
doubly fed induction generator wind turbine with series grid side converter. In: IEEE. Power
Electronics Specialists Conference, 2007. PESC 2007. IEEE. [S.l.], 2007. p. 1839–1845.
FLANNERY, P. S.; VENKATARAMANAN, G. A fault tolerant doubly fed induction generator
REFERÊNCIAS
103
wind turbine using a parallel grid side rectifier and series grid side converter. Power Electronics,
IEEE Transactions on, IEEE, v. 23, n. 3, p. 1126–1135, 2008.
FORTESCUE, C. L. Method of symmetrical co-ordinates applied to the solution of polyphase
networks. American Institute of Electrical Engineers, Transactions of the, IEEE, v. 37, n. 2, p.
1027–1140, 1918.
GIRSANG, I. P.; DHUPIA, J. S.; MULJADI, E.; SINGH, M.; PAO, L. Y. Gearbox and
drivetrain models to study dynamic effects of modern wind turbines. Industry Applications,
IEEE Transactions on, IEEE, v. 50, n. 6, p. 3777–3786, 2014.
HEIER, S. Grid integration of wind energy conversion systems. [S.l.]: Wiley, 1998.
HU, J.; HE, Y.; XU, L.; WILLIAMS, B. W. Improved control of dfig systems during network
unbalance using pi–r current regulators. Industrial Electronics, IEEE Transactions on, IEEE,
v. 56, n. 2, p. 439–451, 2009.
HU, J.; XU, H.; HE, Y. Coordinated control of dfig’s rsc and gsc under generalized unbalanced
and distorted grid voltage conditions. Industrial Electronics, IEEE Transactions on, IEEE,
v. 60, n. 7, p. 2808–2819, 2013.
IEA. Energy and Climate Change: World Energy Outlook Special Report. [S.l.], 2015. Disponível em:
<http://www.iea.org/publications/freepublications/publication/WEO2015SpecialReportonEnergyandClima
Acesso em: 03 Ago. 2015.
IOV, F.; HANSEN, A.; SØRENSEN, P.; BLAABJERG, F. Wind Turbine Block-set in
Matlab/Simulink-General Overview and Description of the Models. AalborgUniversity. [S.l.],
2004.
JAYANTI, N.; BASU, M.; GAUGHAN, K.; CONLON, M. F. A new configuration and control
of doubly fed induction generator (upqc-wg). In: IEEE. Industrial Electronics, 2008. IECON
2008. 34th Annual Conference of IEEE. [S.l.], 2008. p. 2094–2099.
JOUANNE, A. V.; BANERJEE, B. Assessment of voltage unbalance. Power Delivery, IEEE
Transactions on, IEEE, v. 16, n. 4, p. 782–790, 2001.
KEARNEY, J. Grid Voltage Unbalance and The Integration of DFIG’s. Tese (Doutorado) —
Dublin Institute of Technology, 2013.
KELBER, C. R.; SCHUMACHER, W. Active damping of flux oscillations in doublyfed ac
machines using dynamic variation of the system?s structure. Proc. Power Electronics and
Applications (EPE), p. 27–29, 2001.
KRAUSE, P.; WASYNCZUK, O.; HILDEBRANDT, M. Reference frame analysis of a slip
energy recovery system. Energy Conversion, IEEE Transactions on, IEEE, v. 3, n. 2, p.
404–408, 1988.
KRAUSE, P. C. The method of symmetrical components derived by reference frame theory.
Power Apparatus and Systems, IEEE Transactions on, IEEE, n. 6, p. 1492–1499, 1985.
104
REFERÊNCIAS
KUNDUR, P.; BALU, N. J.; LAUBY, M. G. Power system stability and control. [S.l.]:
McGraw-hill New York, 1994.
LEE, C.-Y. Effects of unbalanced voltage on the operation performance of a three-phase
induction motor. Energy Conversion, IEEE Transactions on, IEEE, v. 14, n. 2, p. 202–208,
1999.
LIANG, S.; HU, Q.; LEE, W.-J. A survey of harmonic emissions of a commercially operated
wind farm. Industry Applications, IEEE Transactions on, IEEE, v. 48, n. 3, p. 1115–1123,
2012.
LIAO, Y.; LI, H.; YAO, J.; ZHUANG, K. Operation and control of a grid-connected dfig-based
wind turbine with series grid-side converter during network unbalance. Electric Power Systems
Research, Elsevier, v. 81, n. 1, p. 228–236, 2011.
MASSING, J. R.; PINHEIRO, H. Design and control of doubly-fed induction generators with
series grid-side converter. In: IEEE. Industrial Electronics, 2008. IECON 2008. 34th Annual
Conference of IEEE. [S.l.], 2008. p. 139–145.
MASSING, J. R.; PINHEIRO, H. Small signal stability of dfig with series grid-side converter.
In: IEEE. Power Electronics Conference, 2009. COBEP’09. Brazilian. [S.l.], 2009. p. 711–718.
MILLER, N.; CLARK, K.; WALLING, R. Windinertia: controlled inertial response from ge
wind turbine generators. In: 45th annual Minnesota power systems conference, Minneapolis,
Minnesota. [S.l.: s.n.], 2009.
MILLER, N.; SHAO, M.; PAJIC, S.; D’AQUILA, R. Western Wind and Solar Integration
Study Phase 3–Frequency Response and Transient Stability (Report and Executive Summary).
[S.l.], 2014.
NEMA. MG-1: Motors and Generators. [S.l.], 2009. Disponível em:
<https://law.resource.org/pub/us/cfr/ibr/005/nema.mg-1.2009.pdf>. Acesso em: 09
Set. 2015.
PARK, R. Two-reaction theory of synchronous machines - part ii. Electrical Engineering,
IEEE, v. 52, n. 1, p. 44–45, 1933.
PETERSSON, A. Analysis, modeling and control of doubly-fed induction generators for wind
turbines. [S.l.]: Chalmers University of Technology, 2005.
QIAO, W.; HARLEY, R. G. Improved control of dfig wind turbines for operation with
unbalanced network voltages. In: IEEE. Industry Applications Society Annual Meeting, 2008.
IAS’08. IEEE. [S.l.], 2008. p. 1–7.
RESERVICES. Economic grid support services by wind and solar PV: review of system needs,
technology options, economic benefits and suitable market mechanisms. [S.l.], 2014. Disponível
em: <http://www.ewea.org/fileadmin/files/library/publications/reports/REserviceS.pdf>.
Acesso em: 05 Ago. 2015.
RODRÍGUEZ, P.; LUNA, A.; CANDELA, I.; TEODORESCU, R.; BLAABJERG, F. Grid
synchronization of power converters using multiple second order generalized integrators. In:
REFERÊNCIAS
105
IEEE. Industrial Electronics, 2008. IECON 2008. 34th Annual Conference of IEEE. [S.l.],
2008. p. 755–760.
RODRIGUEZ, P.; LUNA, A.; CANDELA, I.; MUJAL, R.; TEODORESCU, R.; BLAABJERG,
F. Multiresonant frequency-locked loop for grid synchronization of power converters under
distorted grid conditions. Industrial Electronics, IEEE Transactions on, IEEE, v. 58, n. 1, p.
127–138, 2011.
RODRIGUEZ, P.; LUNA, A.; CIOBOTARU, M.; TEODORESCU, R.; BLAABJERG, F.
Advanced grid synchronization system for power converters under unbalanced and distorted
operating conditions. In: IEEE. IEEE Industrial Electronics, IECON 2006-32nd Annual
Conference on. [S.l.], 2006. p. 5173–5178.
RODRIGUEZ, P.; TEODORESCU, R.; CANDELA, I.; TIMBUS, A. V.; LISERRE, M.;
BLAABJERG, F. New positive-sequence voltage detector for grid synchronization of power
converters under faulty grid conditions. In: IEEE. Power Electronics Specialists Conference,
2006. PESC’06. 37th IEEE. [S.l.], 2006. p. 1–7.
RUBIRA, S. D.; MCCULLOCH, M. D. Control method comparison of doubly fed wind
generators connected to the grid by asymmetric transmission lines. Industry Applications,
IEEE Transactions on, IEEE, v. 36, n. 4, p. 986–991, 2000.
SHEPHERD, D. G. Historical development of the windmill. [S.l.]: National Aeronautics and
Space Administration, Office of Management, Scientific and Technical Information Division,
1990.
SHOCKLEY, W. The theory of p-n junctions in semiconductors and p-n junction transistors.
Bell System Technical Journal, The, v. 28, n. 3, p. 435–489, July 1949. ISSN 0005-8580.
SINGH, B.; EMMOJI, V.; SINGH, S. Performance evaluation of series and parallel connected
grid side converters of dfig. In: IEEE. Power and Energy Society General Meeting-Conversion
and Delivery of Electrical Energy in the 21st Century, 2008 IEEE. [S.l.], 2008. p. 1–8.
SLOOTWEG, J.; POLINDER, H.; KLING, W. Representing wind turbine electrical generating
systems in fundamental frequency simulations. Energy conversion, ieee transactions on, IEEE,
v. 18, n. 4, p. 516–524, 2003.
SPERA, D. A. Wind turbine technology: Fundamental Concepts of Wind Turbine Engineering.
[S.l.]: Fairfield, NJ (United States); American Society of Mechanical Engineers, 1994.
STOCKER, T.; QIN, D.; PLATTNER, G.-K.; TIGNOR, M.; ALLEN, S. K.; BOSCHUNG, J.;
NAUELS, A.; XIA, Y.; BEX, V.; MIDGLEY, P. M. Climate change 2013: The physical science
basis. [S.l.]: Cambridge University Press Cambridge, UK, and New York, 2014.
TEODORESCU, R.; BLAABJERG, F.; BORUP, U.; LISERRE, M. A new control structure
for grid-connected lcl pv inverters with zero steady-state error and selective harmonic
compensation. In: IEEE. Applied Power Electronics Conference and Exposition, 2004.
APEC’04. Nineteenth Annual IEEE. [S.l.], 2004. v. 1, p. 580–586.
THRESHER, R. W.; ROBINSON, M.; MUSIAL, W.; VEERS, P. S. Evolution of modern wind
turbines part b: 1988 to 2008. In: Wind Turbine Technology: Fundamental Concepts in Wind
106
REFERÊNCIAS
Turbine Engineering, Second Edition. [S.l.]: ASME Press, 2009.
WANG, Y.; XU, L. Control of dfig-based wind generation systems under unbalanced
network supply. In: IEEE. Electric Machines & Drives Conference, 2007. IEMDC’07. IEEE
International. [S.l.], 2007. v. 1, p. 430–435.
WANG, Y.; XU, L.; WILLIAMS, B. W. Compensation of network voltage unbalance using
doubly fed induction generator-based wind farms. Renewable Power Generation, IET, IET,
v. 3, n. 1, p. 12–22, 2009.
WOLL, R. Effect of unbalanced voltage on the operation of polyphase induction motors.
Industry Applications, IEEE Transactions on, IEEE, n. 1, p. 38–42, 1975.
WWEA. World Wind Energy Report 2014: Bulletin Special Issue 2015. [S.l.], 2015. Disponível
em: <http://www.wwindea.org/wwea-bulletin-special-issue-2015/>. Acesso em: 16 Jan.
2016.
XU, H.; HU, J.; HE, Y. Integrated modeling and enhanced control of dfig under unbalanced
and distorted grid voltage conditions. Energy Conversion, IEEE Transactions on, IEEE, v. 27,
n. 3, p. 725–736, 2012.
XU, H.; HU, J.; NIAN, H.; HE, Y. Dynamic modeling and improved control of dfig under
unbalanced and distorted grid voltage conditions. In: IEEE. Industrial Electronics (ISIE), 2012
IEEE International Symposium on. [S.l.], 2012. p. 1579–1584.
XU, L. Coordinated control of dfig’s rotor and grid side converters during network unbalance.
Power Electronics, IEEE Transactions on, IEEE, v. 23, n. 3, p. 1041–1049, 2008.
XU, L.; WANG, Y. Dynamic modeling and control of dfig-based wind turbines under
unbalanced network conditions. Power Systems, IEEE Transactions on, IEEE, v. 22, n. 1, p.
314–323, 2007.
YAMAMOTO, M.; MOTOYOSHI, O. Active and reactive power control for doubly-fed
wound rotor induction generator. Power Electronics, IEEE Transactions on, IEEE, v. 6, n. 4, p.
624–629, 1991.
YAO, J.; LI, H.; CHEN, Z.; XIA, X.; CHEN, X.; LI, Q.; LIAO, Y. Enhanced control of a
dfig-based wind-power generation system with series grid-side converter under unbalanced
grid voltage conditions. Power Electronics, IEEE Transactions on, IEEE, v. 28, n. 7, p.
3167–3181, 2013.
YUAN, X.; MERK, W.; STEMMLER, H.; ALLMELING, J. Stationary-frame generalized
integrators for current control of active power filters with zero steady-state error for current
harmonics of concern under unbalanced and distorted operating conditions. Industry
Applications, IEEE Transactions on, IEEE, v. 38, n. 2, p. 523–532, 2002.
107
APÊNDICE A - TRABALHOS PUBLICADOS E SUBMETIDOS
I.
ARTIGOS COMPLETOS PUBLICADOS EM PERIÓDICOS
SUPPIONI, V. P.; GRILO, A. P. ; TEIXEIRA, J. C. Control methodology for compensation of
grid voltage unbalance using a series-converter scheme for the DFIG. Electric Power Systems
Research, v. 133, p. 198-208, 2016.
II.
TRABALHOS COMPLETOS PUBLICADOS EM ANAIS DE CONGRESSOS
SUPPIONI, V. P.; GRILO, A. P. ; TEIXEIRA, J. C. Methodology for grid voltage unbalance
compensation appling a two-converter series DFIG topology. In: IEEE. 15th International Conference on Environment and Electrical Engineering (EEEIC), 2015, Rome. IEEE 15th International Conference on Environment and Electrical Engineering (EEEIC), 2015. p. 1736-1741.
SUPPIONI, V. P.; GRILO, A. P. ; TEIXEIRA, J. C. Methodology for grid current unbalance
compensation appling DFIG as a parallel active filter. In: IEEE. Power & Energy Society
General Meeting, 2015, Denver. 2015 IEEE Power & Energy Society General Meeting, 2015.
p. 1-5.
SUPPIONI, V. P.; GRILO, A. P. ; TEIXEIRA, JULIO C. Atenuação de desbalanço de corrente
na rede elétrica com o uso do DFIG. In: XX Congresso Brasileiro de Automática, 2014, Belo
Horizonte. Anais do CBA 2014, 2014.
III. ARTIGOS SUBMETIDOS EM PERIÓDICOS
SUPPIONI, V. P.; GRILO, A. P. ; TEIXEIRA, J. C. Improving Network Voltage Unbalance Levels by Controling DFIG Wind Turbine Using a Dynamic Voltage Restorer. Renewable Energy,
2016.