APRESENTAÇÃO DO TRABALHO PRÁCTICO DE SAM
Trabalho de simulação nº3
Motores de corrente alternada
¾ Sistema composto por:
Fonte de alimentação: sistema conversão CA/CC/CA
Motor: indução trifásico, 220/380 V, 50 Hz, Pn=11 KW
Carga: T= k Nm ( 72 Nm à velocidade nominal )
¾ 1ª Fase – Dimensionamento do conversor CA/CC/CA
Composto por 3 andares:
Tensão na saída do rectificador:
2*q
π
* 2 .V .sen( ) = 514 V
q
π
Filtro:
Inversor: transistores IGBTs – dispositivos com comando exterior mais
utilizados em pequenas e médias potências
¾ 2ª Fase – Projecto do sistema de controlo do inversor de tensão
(malha aberta)
Controlo em tensão/frequência estatórica variavel
Funcionamento em MLI
Esquema do sistema:
F. Energia → Conv. Energia → Motor
↑
Referência → controlador
Bloco PWM:
Objectivos do Controlador:
•
•
•
•
•
Controlar a tensão aplicada ao estator (índice de modulação)
Controlar a frequência de saída do inversor (variação da frequência
moduladora)
Manter fluxo constante (V/F) – Im constante
Compensação da queda de tensão na resistência do rotor, às baixas
frequências (f<15 Hz)
Variantes da técnica V/F
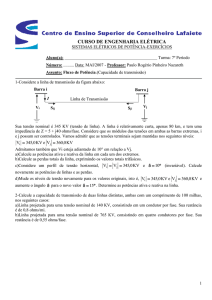
Resultados Obtidos
Tensão No Barramento CC
Corrente no Barramento CC
Rampa f=0 até f=100
1. Sem carga
Corrente no Estator
Binário
Velocidade
¾
3ª Fase – Projecto do sistema de controlo da velocidade
(malha fechada)
.Tendo como ponto de partida o sistema anterior, dimensionar o sistema
que gera a frequência angular electrica, apartir da realimentação de
W(mecanica);
Esquema do sistema:
F. Energia
→
Conv. Energia
→ Motor
↑
Referência
→
controlador
↓
←
realimentação
velocidade
.Técnica V/F melhorada – em função dos parâmetros do motor
Script que define parâmetros do motor e a lei tensão/frequência em função
desses parâmetros
% Parametros do nosso motor de induçao
Sb = 11000;
% Potencia nominal (VA)
Vn = 380;
% Tensao composta nominal (V)
pf = 0.9;
% factor de potencia
In = Sb/(sqrt(3)*Vn*pf);
% corrente nominal eficaz (A)
P= 4;
% numero de polos
fn = 50;
% fequencia nominal (Hz)
wb = 2*pi*fn;
% frequencia angular electrica
we=wb;
wbm = 2*wb/P;
% frequencia angular mecanica
Tb = Sb/wbm;
% binario
Zb=Vn*Vn/Sb;
% impedancia base em ohms
Vm = Vn*sqrt(2/3);
% amplitude da tensao
Vb=Vm;
Tfactor = (3*P)/(4*wb);
% factor para expressao binario
Sn=0.03;
% deslizamento nominal
Nn = 1455;
% velocidade nominal (rot/min)
WMn=2*pi*Nn/60;
% velocidade nominal (rad/s)
Tn = Sb/WMn;
% binario nominal
iasb= 18.5;
% corrente por fase eficaz
rs = 0.88;
% resistencia no estator (ohms)
xls = 0.93;
% reactancia de fugas do estator (ohms)
xplr = xls;
% reactancia de fugas do rotor (ohms)
xm = 30.7;
% reactancia de magnetizaçao (ohms)
rpr = 0.3;
% resistencia do rotor referida ao estator (ohms)
xM = 1/(1/xm + 1/xls + 1/xplr);
J = 0.05;
% inercia do rotor (kg m2)
H = J*wbm*wbm/(2*Sb);
% constante de inercia (s)
Domega = 0;
% coeficiente de amortecimento do rotor
% vector de excitaçao da frequencia
w = (-400:4:400);
emb = j*iasb*xm;
f = w/(2*pi);
N = length(w);
for n = 1:N
we = w(n);
% volts/hertz com baixa frequencia para deslizamento positivo
%
se (we > 0) motor a rodar em sentido positivo
%
senao roda em em sentido contrario
em = abs(we)*emb/wb;
zs = rs + j*(abs(we)/wb)*xls;
vrms(n) = abs(em + iasb*zs);
end
v_f = vrms;
we_f = w;
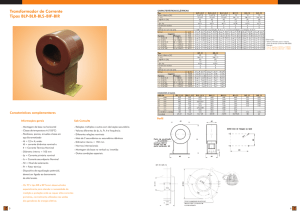
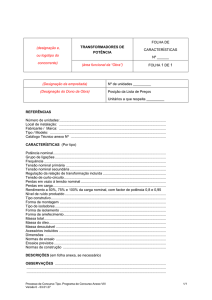
Resultados Obtidos:
1ª variação da referencia de velocidade em vazio:
2ª variação da referência de velocidade com aplicação do binário nominal
3ª variação do binário de carga + variação da referência no fim