Transformação de um problema mal-posto em um outro
bem-posto através da introdução de informação a priori:
Na prática, um problema inverso é mal posto quando existem infinitas soluções
que explicam as observações geofísicas dentro de uma precisão experimental.
Heuristicamente, podemos dizer que um problema mal posto reflete um
desbalanceamento entre a quantidade de informações contida nos dados observados e
a quantidade de informações demandada pelo intérprete na solução do problema
inverso.
Matematicamente, um problema é mal posto (Hadamard, 1962) se a sua solução
não obedece a pelo menos uma das três condições:
EXISTÊNCIA
UNICIDADE
ESTABILIDADE
O problema da Existência , Unicidade e Estabilidade:
Seja p uma função desconhecida pertencente ao sub-espaço F do espaço de P de
todos os possíveis parâmetros e seja uma função conhecida y pertencente ao subespaço métrico AF de um espaço Y de todas as possíveis observações. Considere A
um operador linear que mapea p em y,
Portanto, nosso problema reduz-se a resolver a equação linear dada por
y=Ap
(1)
1
Note que um elemento y AF representa um elemento produzido por uma
transformação AP , cujo operador A envolve relações de causa e efeito obtidas da
resolução de um sistema de equações diferenciais advindas da física-matemática
(equação de Poisson, equação de Laplace, equações de Maxwell, equação da onda).
No entanto, em problemas práticos não conhecemos y com total precisão, em geral,
conhecemos uma medida aproximada yo que contem componentes aleatórias que não
são explicadas por estas equações. Assim a medida y o pertence ao espaço Y porém
pode não pertencer ao sub-espaço AF. Neste caso NÃO EXISTE SOLUÇÃO PARA O
O
SISTEMA y = A p, uma vez que o operado A não é definido
Portanto, estamos violando a primeira condição imposta por Hadarmard para
que um problema seja bem posto: inexistência da solução.
A inexistência de solução levou ao conceito de Quasisolução . Para tanto
considere uma projeção de y
distância entre y c e y
O
o
no sub-espaço AF. Esta projeção yc, será tal que a
será mínima dentre todos os elementos y AF, em outras
palavras, d (yc, y O ) em que d é uma métrica definida no espaço Y e um escalar
positivo que tende a zero a medida que y O tende a y c .
2
Agora o operador A é definido garantindo a existência da solução p*
denominadas de Quasisolução . Logo temos que o operador A mapea p* em y
resultando na equação:
C
y c= A p *.
Considere que a distância entre y c e y
O
é a distância Euclideana, então
buscamos uma estimativa de p que minimize a distância Euclideana entre y c e y O. A
solução é a estimativa via MQ.
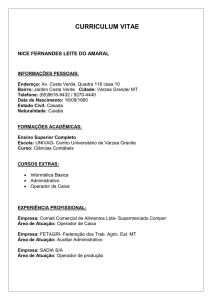
Ap = y
Mínimos quadrados:
yo
AT Ap = AT yo
T
-1 T o
Operador inverso: p = (A A) A y
yc
Y
AF
P
p
F
3
No entanto se o sub-espaço AF for não convexo existirão infinitas projeções de
y em AF uma vez que há infinitas métricas d (y c , y O ) . Se há infinitas projeções
yc há portanto infinitas quasisoluções p*. Neste caso a existência da solução foi
garantida mas a unicidade da solução não.
o
Desta forma temos a primeira condição de UNICIDADE DA SOLUÇÂO que garante que
a situação mostrada na figura acima não ocorre.
PRIMEIRA CONDIÇÃO DE UNICIDADE DA SOLUÇÃO:
Para a garantia da unicidade da solução temos que garantir a unicidade da projeção yo
no sub-espaço AF. Para tanto AF tem que ser CONVEXO. Como o operador A é
linear se AF é convexo então F é convexo também.
4
SEGUNDA CONDIÇÃO DE UNICIDADE DA SOLUÇÃO:
A segunda condição para a garantia da unicidade da solução é a garantia da
unicidade do operador linear A que deve ser único um por um. Logo para o operador A
que mapea F em AF há um operador inverso A
implica p* = 0 é a única solução da equação
–1
que mapea AF em F. Esta condição
A p * = 0.
TERCEIRA CONDIÇÃO DE UNICIDADE DA SOLUÇÃO:
A terceira condição para a garantia da unicidade da solução é a garantia da
continuidade do operador linear A. A continuidade do operador A leva ao importante
conceito de estabilidade da solução.
Para entendermos o conceito de estabilidade vamos considerar que o
subespaço métrico AF é convexo (logo garantimos a unicidade da projeção de yo no
subespaço AF) e que o operador linear A é único e um-por-um (logo garantimos a
unicidade do operador linear A que mapea p* em y c, portanto p* = 0 é a única solução
da equação A p * = 0). Vamos considerar agora uma pequena perturbação , de modo
que ao invés de conhecermos y c conhecemos y c pertencente ao subespaço métrico
5
AF, tal que a métrica d ( yc, y c ) . Logo o operador A mapea p * em yc e o mesmo
operador A mapea p* em yc e que a métrica entre d ( p * , p*) .
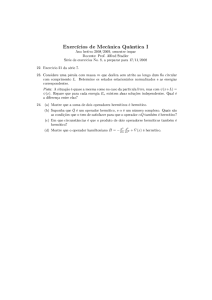
Uma solução é INSTÀVEL se a métrica entre y c e y c tender a zero NÃO
implica que a métrica entre p * e p* tenda a zero. Em outras palavras, uma solução é
instável quando tender a zero NÃO implica que tenda a zero.
Estabilidade da solução
Mapeamento descontínuo ===> Instabilidade
yo
A
p*
yc
F
yc
p*
Y
AF
d ( yc , yc ) <
A
P
d ( p* , p* ) <
Neste caso de instabilidade da solução, o operador linear A é único, um-porum porém descontínuo.
Heuristicamente, falando uma solução é instável se uma pequena perturbação
no espaço da observações geofísicas leva a uma grande perturbação no espaço dos
parâmetros (soluções).
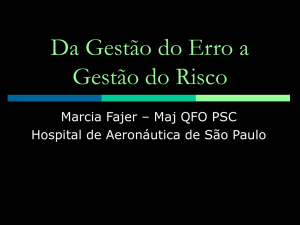
Por outro lado, se operador linear A é único, um-por-um e contínuo a
solução é ESTÁVEL. Neste caso, no mapeamento contínuo se a métrica entre yc e yc
tender a zero, ou seja se tender a zero, implica que a métrica entre p* e p* tenda a
6
zero, ou seja implica que tenda a zero.
Neste caso, em que o mapeamento é
contínuo p* tende a p* .
Temos então um lema: Dado um subespaço COMPACTO e CONVEXO F, se o
mapeamento é F AF é CONTÍNUO e UM-POR-UM então o mapeamento inverso
AF F é também CONTÍNUO.
Mapeamento contínuo ==> Estabilidade
A
yo
yc
Y
yc
AF
p*
0
0
p*
F
A
P
d ( yc , yc )
0
d ( p* , p* )
0
p*
p*
Subespaço F é compacto
Conclusão: Se o operador linear A é contínuo e um-por-um e se o subespaço F
que contem a solução é compacto então temos um problema bem posto.
Heuristicamente, um conjunto compacto é um conjunto em que dado qualquer
elemento podemos encontrar outro elemento tão próximo do primeiro quanto se queira.
Geometricamente, um conjunto compacto é aquele que não há “buracos” ou
“descontinuidades”.
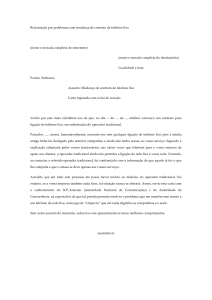
Exemplo físico-geométrico de um problema bem posto:
Vamos ilustrar um problema bem posto com um exemplo físico-geométrico
usando uma fotografia aérea, em que o centro do sistema óptico está em um avião que
sobrevoa uma região. Então temos que:
P (espaço de todos os possíveis parâmetros) é a topografia da região;
Y (espaço de todas as possíveis observações) é o registro fotográfico;
F (sub-espaço do espaço P que contém a solução) é o trecho da topografia visível
quando o centro óptico está na atual posição (localização do avião);
7
AF (sub-espaço do espaço Y que contém as observações) é a imagem de F;
A (operador que mapea F em AF ) é o sistema ótico;
-1
A (operador inverso AF F ) é a definição de alguma propriedade da topografia
(por exemplo cor do solo);
Exemplo físico-geométrico de um problema BEM POSTO
y
AF
Topografia
F
A: F
P
AF
A é o sistema óptico
A-1 é a definição de alguma propriedade da
superfície da topografia
Operador do tipo um por um e contínuo
Note que o operador A que faz o mapeamento F AF é UM-POR-UM isto porque a
cada elemento em F corresponde apenas um elemento em AF. Note também que o
operador A que faz o mapeamento F AF é contínuo porque se dois elementos
estão próximos em F suas correspondes imagens em AF também estão próximas. Além
disso note que o subespaço F é um espaço compacto, ou seja, não há buracos ou
descontinuidades.
Concluímos que se o operador A é contínuo e um-por-um e se o subespaço F que
contem a solução é compacto então temos um problema bem posto.
8
Exemplo físico-geométrico de um problema mal posto:
Vamos ilustrar um problema mal posto usando o mesmo exemplo físicogeométrico da fotografia aérea apresentado acima. No entanto, vamos supor que o
avião esteja sobrevoando uma região com muitas nuvens.
Especificamente,
suponhamos agora que haja uma nuvem entre os pontos p1 e p2 então, neste trecho, a
imagem fotográfica da topografia não foi registrada. Assim as operações A e A –1 não
foram definidas em y isto porque y
AF. Em outras palavras, houve neste caso
a violação da condição de existência da solução (primeira condição de Hadamard).
Além disso, observe que uma pequena perturbação em torno de y3 leva a grandes
perturbações no espaço dos parâmetros. Especificamente, uma pequena perturbação
para direita de y3 leva através de A –1 a pontos na topografia a direita de p4, ou seja, a
elementos (pontos) afastados de p3. Em outras palavras, neste caso o mapeamento
inverso AF F é descontínuo (A –1 é descontínua em y3).
Exemplo físico-geométrico de um problema MAL POSTO
y1 y y2
y0
AF
y3
y
y5
Topografia
p0
p1
p2
p3
F
p4
P
p5
y AF inexistência do operador A
y AF existência do operador A-1 porém é
descontinuo
9
Concluímos que neste exemplo não há garantia da existência do operador A.
Além disso, quando o operador A existe é do tipo um-por-um porém é
descontínuo e o subespaço F, que contem a solução,
não é compacto (com
buracos e descontinuidades). Então este segundo exemplo caracteriza um
problema mal posto.
O método da Regularização de Tikhonov:
Suponhamos que o operador A na equação
Ap =y
(2)
é tal que o operador inverso
A-1 não seja contínuo no subespaço AF e o subespaço F
de possíveis soluções não seja compacto, logo não há estabilidade da solução.
Para solucionarmos o problema da instabilidade da solução, há uma abordagem
desenvolvida por Tikhonov (1963) conhecida como método de Regularização de
Tikhonov que estabelece condições matemáticas para obtermos soluções estáveis de
modo que uma pequena perturbação nos dados leve a pequenas perturbações nas
soluções estimadas. Esta abordagem baseia-se no conceito de operador regularizador.
O conceito de operador regularizador:
Suponhamos que o operador A na equação (2) é tal que o operador inverso
A-1
não seja contínuo no subespaço AF e o subespaço F de possíveis soluções não seja
compacto. Se o membro do lado direito da equação
AF que difere do exato membro do lado direito
métrica, definida no subespaço AF,
aproximada
p*
d ( yT , y
p
y
T
é um elemento
de um valor
y
, então se a
) , é óbvio que a solução
da equação (2) não pode ser definida como a solução exata desta
equação com membro do lado direito aproximado
equação:
Ap =y
*
= A-1 y.
Isto porque se
(y = y ) , ou seja, conforme a
A-1
não é um operador contínuo no
subespaço AF, então não há garantia que a solução obtida a partir de observações
10
imprecisas y , ou seja a solução
p * = A-1 y , tenda a solução exata p*T quando
0.
Para obtermos uma solução aproximada estável via método da regularização de
Tikhonov teremos primeiro que encontrar um operador regularizador.
Para tanto
faremos algumas considerações preliminares. Vimos que o parâmetro numérico
caracteriza o erro no lado direito da equação (2).
regularizadores
que iremos definir
Naturalmente os operadores
para buscar uma solução aproximada estável
dependerá de um parâmetro chamado de parâmetro de regularização que é função de
. Portanto,
*
definiremos p com o auxílio de um operador regularizador que depende
de um parâmetro tendo um valor escolhido de acordo com o erro
no dado inicial y .
Especificamente, este operador será escolhido de modo que se
y
aproximar-se do valor exato
aproximar-se da solução exata
Ap=yT.
exatas,
p*
y
T
T
, então a solução aproximada
p
*
deve
que estamos procurando para a equação
Sendo que a solução exata, o elemento
yT AF,
0 , ou seja, se
são conectados pela equação Ap
p*T
*T
F , e as observações
= yT
Como já abordamos, para solucionarmos o problema da instabilidade da
solução, há uma abordagem desenvolvida por Tikhonov (1963) conhecida como método
de Regularização de Tikhonov que estabelece condições matemáticas para obtermos
soluções estáveis. Este método baseia-se na construção de um operador regularizador
para a equação (2) na vizinhança de
regularizador para a equação
y=yT.
y=Ap
Um operador R( y, ) é chamado de
na vizinhança de
y = yT se duas condições
forem satisfeitas:
(1)
Se na vizinhança de y existir um número positivo
,
R( y, ) é definido para todo > 0 e todo y AF.
tal que o operador
Então existe um valor
11
> 0
tal que
d ( y , yT ) e dentro desta região define-
se um operador regularizador R(
(2)
Se existe
y, ).
y que satisfaz d ( yT , y
operador regularizador
existe uma função
) em que
o
R( y , ) está definido dentro desta região. Então
, y de e dos dados y tal que, para todo
existe um número () tal que a inclusão y AF
e
da inequação
d ( yT, y ) ()
implique
d ( p*T , p*)
onde
12
p* = p*= R( y , ).
d ( y , y ) <
(b) Se existir y que satisfaz
Então posso definir um operador R(y , ), em
que >0, tal que
d ( p *, p * ) <
d ( y , y ) <
implique
em que será escolhido de modo que se :
0
Se
d ( y, y )
yT )
d(y,
R( y , ),
, y conforme o erro
0 , ou seja, se
regularizada da
solução exata
p*
d ( p* , p* ) 0
0
operador de regularização
0
y
isto é,
podemos com o auxílio de um
escolher o parâmetro numérico
dos dados iniciais
aproximar-se do valor exato
p* = p*= R( y
p*T,
p*
d ( p*T , p*)
y
de modo que, se
y T , então a solução
, )
aproxima-se da
0. Portanto a solução
*
regularizada p é uma solução estável.
13
Esta solução
p* = p*= R( y , ), obtida com o auxílio
do operador de regularização
R( y
, ),
é chamada uma solução
regularizada da equação (2) e o parâmetro numérico
é
chamado de
parâmetro de regularização.
Em resumo o método de Regularização de Tikhonov estabelece
duas condições. A condição (1) estabelece que existe uma região em torno do
elemento
y = yT dentro da qual definimos um operador R( y , ) chamado
de operador de regularização. Este operador depende continuamente da
variável
elemento
(parâmetro de regularização). A condição (2) estabelece que se o
y
está dentro desta região definida pela condição (1), então
podemos definir um operador de regularização
continuamente da variável
d ( y , yT )
tal que, se
0 , isto implica que
0 e por conseqüência que
R( y , )
que depende
0 , ou seja, se a distância
0, isto é,
d ( p*T , p*)
p* p*T .
O método da Regularização de Tikhonov:
O método de regularização de Tikhonov é um método de obtenção de soluções
aproximadas da equação (2) que são estáveis sob pequenas perturbações no membro
do lado direito da equação (dados geofísicos). Este método consiste:
a) na construção de operadores de regularização ; e
b) na determinação do parâmetro de regularização
tamanho do erro contido nos dados
y
que é função do
(no membro do lado direito da
equação)
14
Então o nosso primeiro passo, consiste em construir operadores de
regularização.
Método de construção de operadores de regularização:
O método para a construção de operadores de regularização para a equação (2)
baseia-se no princípio variacional. Nós presumiremos que a equação
que
yT AF
A p= yT , em
*T
são os dados exatos, tem apenas uma ÚNICA solução p
.
Seja H(p) um funcional com as seguintes propriedades:
1)
contínuo;
2)
não negativo,
3)
definido no subespaço compacto F1 do espaço métrico F;
4)
em que a solução exata p
5)
para todo número positivo
*T
pertence ao domínio de definição de H(p);e
c, o conjunto de elementos p de F1 para o qual
H(p) c é um subconjunto de F1 .
A este funcional
H(p)
apresentando tais propriedades chamaremos de
funcional estabilizante ou simplesmente o estabilizador.
O método de construção de operador regularizador reduz-se a um problema de
extremo condicional de minimizar o funcional quasimonotônico H(p) sujeito a explicar os
dados observados (geofísicos) dentro do erro
contido nos dados y observados (erro
experimental)
H( p )
inf
p F
sujeito a : A p y
,
(3)
este problema é de difícil solução. Operacionalmente, torna-se mais fácil solucionarmos
o seguinte problema de extremo condicional:
15
H( p )
inf
p F
sujeito a : A p y
(4)
.
Este problema de extremo condicional (equação 4) é resolvido via método dos
Multiplicadores de Lagrange. Assim temos o seguinte problema de extremo
incondicional :
pF
A p y 2
INF
( )H(p) ,
(5)
em que o parâmetro de regularização é determinado da condição
d ( A p* y ) =
(6)
*
sendo p o elemento em F no qual o funcional M
M p, y A p y 2
(p, y)
( )H(p)
(7)
atinge o seu maior limite inferior (inf).
O elemento
p*pode ser considerado como
o resultado da aplicação ao
membro do lado direito (y=y) da equação (2) algum operador regularizador R1 que
depende do parâmetro de regularização :
p*= R1 ( y , ),
onde o parâmetro numérico
(8)
depende do erro .
Chamamos o funcional
H(p)
estabilizador e chamamos o funcional
de funcional estabilizante ou simplesmente o
M (p, y) de funcional suavizante.
Observe a generalidade da condição (5) para obtenção de soluções estáveis:
p
A é um operador linear ou não linear que realiza um mapea contínuo e um-
y
são elementos definidos em espaços métricos;
por-um.
16
O funcional H(p) sob as condições de ser um funcional estabilizante, isto é,
contínuo, não negativo, definido em um subespaço compacto do espaço de
parâmetros ao qual pertence a solução teórica, é um funcional bastante
genérico no sentido de permitir incorporar uma classe bastante ampla de
informações a priori sobre os parâmetros p na solução de um problema
geofísico.
Note também a generalidade do problema (7) que estabelece. Suponha que o
conjunto F de possíveis soluções da equação (2) é um espaço métrico e que
H(p)
é
um funcional estabilizante definido no conjunto F1 F. Então temos o seguinte teorema:
Seja
A um operador contínuo que mapea F em AF.
existe
AF e todo parâmetro positivo
um elemento
Para todo elemento
p*
F1
y de
para o qual o
funcional
M p, y d A p, y H(p)
atinge o seu maior limite inferior:
, y
inf M p, y M pμ
pF1
Veja que
p
y
.
são, simplesmente, elementos definidos em espaços
métricos. Estes elementos podem ser, por exemplo, funções. Considerando os
elementos
p
y
como os vetores
p e y o que contém, respectivamente, um
número finito de parâmetros descrevendo o modelo interpretativo e as observações em
pontos discretos, então ao invés de um operador contínuo
sensibilidade
teremos a matriz de
A p , que no caso linear não depende de p e, finalmente, ao invés
do maior limite inferior (inf) do funcional
escalar
A,
H(p)
teremos o mínimo de uma função
H p . Tomando então na equação (4) a norma
e a função
H p , como normas Euclideanas ponderadas:
17
Hp p p o
e
yo A p
2
T Wp p p o ,
y o A p
T
(9)
Wy y o A p ,
então a condição (5) torna-se:
T
1
MIN Mp MIN
y o A p Wy y o A p p p o
( )
em que
po é
um vetor de referência e
WP
e
Wy
W p p ,(10)
T
p
o
são matrizes positivo-
definidas nos espaços de parâmetros e observações, respectivamente. Note que a
função escalar
H p na equação (9) introduz informações a priori no espaço dos
parâmetros e depende somente do vetor
po
e da matriz
WP .
Se a matriz
WP for diagonal então a função H p ( na equação (9) ) pode ser escrita como:
Hp
p
M
i 1
em que
i
poi
Wp i , pi e poi
elementos de
W
2
pi
,
são o i-ésimo valor diagonal e os o i-ésimos
o
WP , p e p respectivamente.
Assim a informação a priori introduzida ao minimizar
uma solução aproximada
~
p
que esteja o mais próximo possível de
o grau de proximidade desejada é dado pela matriz
de
WP impõe
H p é a de buscar
uma grande proximidade de
~
p
p o , sendo que
WP . Valores altos na diagonal
a
po
e vice–versa. A solução
18
geral da equação (10) é obtida tomando o gradiente da função M p e igualando o
resultado ao vetor nulo:
T
o
p Mp p y o A p Wy y o A p ( )p
pp
W p p
T
o
p
T
T
T
T T
p M( p ) p p A Wy A p 2 p A Wy y o y o Wy y o
T
T
T
( ) p p Wp p 2p Wp p o p o Wp p o
Calculando os gradientes e igualando o resultado ao vetor nulo temos:
T
T
~
~
2A Wy A p 2 A Wy y o 2 ( ) Wp p 2 ( ) Wp p o 0
(12)
T
~
A Wy A p
(13)
~
T
( ) Wp p ( ) Wp p o A Wy y o
T
Vamos somar nos dois lados da equação o termo
A Wy Ap o então teremos:
T
T
~
~
A Wy A( p p o ) ( ) Wp p p o A Wy (y o Ap o )
Resultando na equação normal:
A
T
Wy A ( ) Wp
p~ p A W y
T
o
o
y
Portanto obtemos o estimador genérico:
T
~
p p o A Wy A ( ) Wp
-1
T
A po
A Wy y o A p o
(14)
(15)
(16)
Tomando a identidade matricial:
C D I C C D C I
m
sendo
C
(17)
n
uma matriz com dimensão M x N e
D
uma matriz com dimensão N x M.
19
C D I
1
Pré e pós-multiplicando ambos os lados
D C I
n
da identidade (17) por
, respectivamente, obtemos:
1
1
m
m
e
1
C D I C D I C D C I C D I
C D C In
m
1
n
C D I
1
1
m
m
C D C In D C In
C
(18)
Podemos reescrever a equação (16):
~
p po B yo A po
em que
T
B A Wy A ( ) Wp
(19)
-1
vamos colocar em evidência o termo
T
A Wy
( ) Wp dentro do termo a ser invertido:
T
1
B A Wy A
Wp1 Im
( )
B ( ) Wp
1
( ) Wp
1
Wp1 Im
A Wy A
( )
T
-1
T
A Wy
-1
T
A Wy
(20)
Vamos chamar:
T
C A Wy e
1
D A
Wp1 .
( )
Agora vamos usar a identidade (18) na equação (20)
B ( ) Wp
1
1
T
A Wy A
Wp1 A Wy In
( )
T
-1
20
1
Colocando o termo
( ) 1 Wy
para dentro do termo a ser invertido temos:
1
T
1
B Wp A A
Wp1 A Wy In
( )
T
( ) Wy -1
T
T
B Wp 1A AWp1A ( ) Wy -1
Substituindo a equação 21 em 19 temos:
T
T
~
p p o Wp 1A AWp1A ( ) Wy -1
y
-1
o
-1
-1
(21)
A po
(22)
As equações (16) e (22) só são identidades entre si se as matrizes
Wp
e/ou
se
e suas inversas (
Wy 1 e Wp 1 ) não forem singulares. Note que se
Wy e
Wy
Wp forem singulares, então só a equação (16) pode ser usada. Por outro lado,
Wy 1 e/ou Wp 1
forem singulares, então só a equação (22) pode ser usada. Se
nem uma das quatro matrizes acima for singular, então os estimadores genéricos (16) e
(22) são idênticos.
Portanto as duas equações que chamaremos de estimador genérico são:
T
~
p p o A Wy A ( ) Wp
-1
T
A Wy y o A p o
e
T
T
~
p p o Wp 1A AWp1A ( ) Wy -1
y
-1
o
A po
21