CARLOS ALEXANDRE PACHOLOK
JHONATAN ZEZAK RODRIGUES
Controle de Tráfego do Transporte Coletivo
Relatório apresentado à disciplina de
Projeto Final II, Curso de graduação em
Engª. Elétrica, Setor de Ciências Exatas e
Tecnológicas,
Pontifícia
Universidade
Católica do Paraná.
Orientador : Profº. Mardson Freitas
de Amorim
CURITIBA
DEZEMBRO / 2007
Controle de tráfego do transporte coletivo
PLANO DE PROJETO
Equipe:
CARLOS ALEXANDRE PACHOLOK
JHONATAN ZEZAK RODRIGUES
Orientador:
____________________________
Prof.º Mardson Freitas de Amorim
Pontifícia Universidade Católica do Paraná
Projeto Final II
Engenharia Elétrica
Professor Responsável: James Alexandre Baraniuk
CURITIBA
DEZEMBRO / 2007
INDICE
RESUMO: .................................................................................................................................... 1
INTRODUÇÃO: ............................................................................................................................ 2
GPS.................................................................................................................................... 5
GSM/GPRS....................................................................................................................... 5
Micro-controlador ............................................................................................................. 5
Servidor ............................................................................................................................. 5
Módulo GPS...................................................................................................................... 7
Módulo Receptor GPS Trimble...................................................................................... 8
Funcionamento do Módulo GPS ................................................................................... 9
Módulo GPRS................................................................................................................. 10
MÓDULO MÓVEL ..................................................................................................................... 12
GPS.................................................................................................................................. 12
GPRS............................................................................................................................... 13
PIC – Micro Controlador (Software)............................................................................ 14
SERVIDOR ................................................................................................................................. 17
Introdução Teórica ao C++ Builder ............................................................................. 17
Introdução Teórica ao Banco de Dados e Tabelas .................................................. 17
DRIVER OBDC .............................................................................................................. 19
FERRAMENTAS DE CONEXÃO C++ BUILDER COM O MySQL ........................ 19
MODELAGEM DE BANCO DE DADOS .................................................................... 22
SERVIDOR DE CONTROLE DE TRAFEGO DO TRANSPORTE COLETIVO.... 25
CONSULTAS DO SISTEMA ........................................................................................ 30
CÁLCULO DO TEMPO ESTIMADO DO PRÓXIMO ÔNIBUS................................ 33
ALGORITMO DO CÁLCULO DO TEMPO ESTIMADO........................................... 35
ARMAZENANDO DADOS NO SERVIDOR:.................................................................................. 40
CONCLUSÃO: ............................................................................................................................ 42
RESUMO:
Objetivando uma melhora do transporte coletivo, identificando a localização do ônibus,
velocidade e tempo estimado de chegada até próxima estação, este projeto final desenvolveu um
protótipo de um sistema de controle e tráfego do transporte coletivo. São utilizados dispositivos de
localização via satélite GPS integrados com o sistema de comunicação através do sistema móvel
celular com a tecnologia GSM/GPRS, com comunicação em tempo real que são integrados a um
micro-controlador. O veículo, assim como cada estação, se comunicará com o servidor na central de
controle e operação para o envio e recepção dos dados.
No hardware são utilizados os módulos GPS e GSM/GPRS da PUCPR. Para o controle desses
dispositivos é utilizado um micro controlador da família PIC adquirido a partir de recursos dos
próprios desenvolvedores do projeto.
Já o quesito software, é utilizada a linguagem C/C++ tanto na implementação do servidor
central, quanto na programação da placa com o micro controlador.
1
INTRODUÇÃO:
As grandes cidades sofrem cada vez mais com os congestionamentos que ultrapassam o
horário de rush. O problema é antigo e cada vez está em piores condições, gerando grande stress na
população. O sistema de transporte público visa atender toda a população no translado casatrabalho, ou casa-escola, enfim, na locomoção dos habitantes. Todavia, o sistema de transporte
público coletivo não possui muitos adeptos e, sempre que possível, o usuário utiliza-se de transporte
próprio devido à superlotação e horário indeterminado ou com muito atraso.
O projeto se destina às empresas de ônibus que almejam melhorar e modernizar o sistema
de transporte. Neste caso a URBS da cidade de Curitiba seria o possível cliente. O projeto viabiliza o
rastreamento, controle de horários de partida e chegada dos ônibus, assim como a velocidade do
mesmo, melhorando assim o sistema de transporte coletivo e facilitando a vida do usuário.
O Sistema de Controle e tráfego do transporte coletivo via GPS é um sistema inovador e
avançado de coleta de informações de operações da frota do transporte coletivo utilizando módulos
com tecnologia GPS e transmissão desses dados através de módulos celulares GSM/GPRS.
GPS é a sigla inglesa de Global Positioning System e significa Sistema de Posicionamento
Global, um sistema que fornece a posição geográfica de qualquer ponto da terra através de
coordenadas geográficas emitidas pelos sistemas de satélites.
Os sinais emitidos pelos satélites são recebidos pelo módulo GPS sendo possível determinar
com precisão o local e horário em que se encontra um determinado ônibus, além da velocidade
desenvolvida naquele momento, a direção e a distância percorrida por ele.
Depois de efetuada a leitura da posição geográfica e outros dados decorrentes do módulo
GPS, as informações serão enviadas por um módulo celular GSM/GPRS ao um servidor central que
processará as informações e re-enviará aos terminais de passageiros.
A sigla GRPS vem do inglês General Packet Radio Service, que significa serviço global de
transmissão de dados por pacotes. Seu funcionamento se baseia no envio e recepção de informações
em uma rede telefônica celular GSM. Essas informações são divididas em pacotes, que percorrem
diversos caminhos até o destino final. Na qual são reagrupados e lidos de forma correta.
O software utilizará recursos gráficos indicando as posições e o itinerário realizado por todos
os ônibus, velocidade atual, tempo esperado até a próxima estação.
2
DETALHAMENTO DO PROBLEMA:
Na Curitiba, que possui um sistema de transporte exemplar, invejado, premiado e copiado
por muitos lugares e um grande número de usuários satisfeitos (89% segundo a URBS) este sistema é
organizado pela URBS (Companhia de Urbanização de Curitiba). Ônibus bi-articulados trafegam em
vias exclusivas e terminais de ônibus e estações tubo permitem aos passageiros trocarem de linha
pagando apenas uma passagem. Ainda assim, a população foge do serviço mesmo fora dos horários
de pico e reclamam da imprecisão dos horários. A alegação é que de ônibus precisam sair 30 minutos
antes ou até mais, pois não sabem que horas o ônibus passará. Teoricamente, os ônibus possuem um
horário pré-estabelecido, mas esse horário funciona somente em paradas finais e, fora disso, em
intervalos de horários. Os ônibus bi-articulados em dia de semana passam de cinco em cinco
minutos, sábados de dez em dez minutos e domingos e feriados de quinze em quinze. Contudo, o
usuário quer saber quando passará o próximo. Ou ainda, há casos em que o usuário está no terminal
e tem duas opções, uma que demora mais e outra menos. O questionamento é: a que demora mais
já está no terminal e a que demora menos chega há um minuto, em dois ou somente daqui quinze
minutos?
Com o intuito de melhorar esse serviço, o projeto propõe localizar e identificar a hora
estimada da chegada do próximo ônibus. O sistema identificará a localização do ônibus, sua
velocidade e estimará o horário de chegada na próxima estação tubo ou terminal. Esse sistema terá
um apelo muito forte ao usuário do transporte coletivo e servirá de incentivo às campanhas de uso
do transporte publico. Para os proprietários dos veículos poderá ser utilizado como segurança pelo
serviço de rastreamento e para URBS uma otimização dos veículos, horários de pico com mais ônibus
e melhor intercalados.
Soluções parecidas existem em alguns lugares do Brasil. Contudo, em São Paulo (capital), por
exemplo, o sistema que deveria informar o horário de chegada do próximo ônibus está sempre fora
do ar. Uma solução barata aplicada em alguns lugares é a utilização de rádio freqüência, onde em
cada parada avisa a próxima da que o ônibus está chegando. Porém, esta solução possui, como
principal falha, casos em que o ônibus tenha de parar devido a acidentes ou congestionamento o
tempo de chegada não se aplicará. Outro problema da solução por rádio freqüência é a distância
alcançada. Por GPRS é possível informar a localização do ônibus a qualquer terminal ou estação tubo
alvo que esteja dentro da área de cobertura da rede de celulares, o que atualmente nas grandes
cidades não é um problema e faz com que a abrangência seja praticamente total.
O projeto propõe um sistema que, além de fornecer a facilidade de o passageiro saber o
horário de chegada do seu ônibus, fornece facilidades aos proprietários dos veículos, com o sistema
de GPS integrado ao GPRS e ao micro-controlador. Assim, é possível adicionar serviços de acordo
com as especificações do proprietário. Por exemplo, informações de distância percorrida,
informações da bomba de combustível, velocidade média, temperatura do motor, botão de pânico
3
para cobradores em caso de pânico. Para a URBS, que gerencia o sistema, algumas das possíveis
informações são: informação do número de passageiros que entraram no ônibus ou na estação tubo,
botão de pânico para as estações tubo, certificação do número de ônibus trafegando na rota, além
das informações que são de comum interesse da URBS e proprietários de ônibus. Com a
implementação do sistema um maior número de cidadãos utilizará o sistema, gerando maior lucro à
operadora.
Através do rastreamento via GPS, os semáforos poderão ser programados com antecedência
a fim de liberar a passagem dos ônibus. Se aplicado, o sincronismo entre ônibus e semáforos,
diminuiria muito o tempo da viajem e, com isso, ganhando passageiros.
4
TRABALHO A SER DESENVOLVIDO:
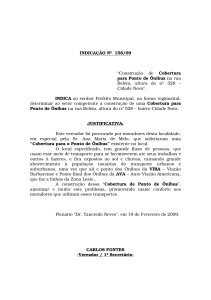
O projeto foi dividido em quatro módulos abaixo relacionados:
Módulo GPS;
Módulo GSM/GPRS;
Micro-controlador;
Servidor.
Figura 1 – Diagrama dos módulos funcionais
GPS
Nesse primeiro módulo funcional serão verificados quais são os dados enviados, tempo de
verificação e envio para serial. Posteriormente, o módulo será colocado para enviar os dados obtidos
dos satélites para uma interface de alto nível para o usuário (LabView). Na versão final será feito com
que o GPS envie as informações para o módulo GPRS através de pacotes de dados até o servidor.
GSM/GPRS
Nessa segunda etapa, será verificado o funcionamento do módulo e suas características,
enviando dados de teste na rede GPRS. Será verificado como são seus comandos e dados enviados
através da porta serial, tempo de envio e etc. Após esses períodos de testes, o módulo GPRS será
configurado para receber os dados do GPS e enviá-los através de pacotes IP para o servidor.
Micro-controlador
O terceiro módulo consiste no software e no hardware do micro-controlador. O software é o
código em linguagem C dos procedimentos que o micro-controlador terá que efetuar para
interfacear os dados coletados do GPS e enviá-los através do modem GPRS. Já no hardware, será
confeccionada uma placa para alojar o micro-controlador.
Servidor
5
No quarto e último módulo funcional, o receptor funcionará como um servidor de bancos de
dados que receberá os dados enviados do modem GPRS, depois de processados, re-encaminhando
para o terminal, na qual terá outro módulo GSM/GPRS integrado com display.
No software, implementado em linguagem C/C++, fará o recebimento e processamento das
informações enviadas pelos ônibus, consultando seu trajeto atual, velocidade, sincronismo de relógio
e calculo aproximado do tempo até próxima estação.
6
TECNOLOGIAS QUE SERÃO UTILIZADAS:
Módulo GPS
O sistema de GPS fornece uma precisa capacidade de fornecer coordenadas geográficas de
um determinado ponto na terra, velocidade e altitude através da navegação tridimensional.
Desde os primórdios os homens utilizavam os corpos celestes para a navegação e
orientação. A navegação astronômica possui alguns inconvenientes, como a não presença dos astros
a qualquer hora (dias nublados, por exemplo) e em qualquer ponto, a pessoa deve ter a capacidade
para fazer essa leitura, contudo, tem a vantagem de estar ali, e poder utilizar sem pedir autorização a
ninguém.
Sistemas de navegação por ondas de rádios também apresentam limitações, como as
ondas de rádio de alta freqüência proporcionam navegação precisa, mas são influenciadas pelo
relevo. Já as ondas de baixa freqüência são pobres em precisão e os equipamentos não são de fácil
acesso para qualquer usuário.
Pesquisas realizadas na década de 70 e 80, pela Força Aérea dos Estados unidos levaram
ao sistema de navegação por satélites, GPS, cujos principais objetivos foram a radio navegação em
três dimensões com alta precisão de posição, navegação em tempo real, imunidade a interferências,
cobertura global e inoperabilidade, rápida obtenção dos dados transmitidos pelos satélites.
O funcionamento básico de do sistema GPS se baseia no principio de triangularização,
segundo o qual o observador conhece a posição de um conjunto de satélites em relação a um
referencial inercial e sua posição em relação a este conjunto, obtendo sua própria posição no sistema
de referência.
O GPS é dividido em três segmentos principais:
segmento espacial, constituído pelos satélites;
segmento de controle, constituído pelas estações terrestres que controlam o
desempenho e o funcionamento do sistema;
segmento usuário, constituído pelos usuários do sistema.
A mensagem transmitida por cada satélite ao usuário contém:
parâmetros para correção do relógio do satélite;
efemérides do satélite;
almanaque e "saúde" de todos os satélites;
dados para correção da propagação ionosférica;
parâmetros para correções orbitais;
código de identificação.
A mensagem referente dos satélites pode chegar de forma incorreta. Essas principais fontes
de erro podem ser:
7
erro devido à geometria dos satélites com relação ao observador;
desvios dos relógios dos satélites;
atraso de propagação e processamento dos sinais pelos
pelos circuitos dos satélites;
erros devido a trajetórias múltiplas dos sinais;
efeitos da atmosfera sobre a velocidade e a trajetória de propagação dos sinais
transmitidos;
erros devidos à resolução e ruído do receptor do usuário;
erro na determinação da
d posição dos satélites.
Na comunicação com os receptores de GPS são
são utilizados dois sinais, chamados de L1 e L2. L1
tem a freqüência de 1575.42 MHz e é utilizado por GPS para uso civil. No passado o governo dos
Estados Unidos agregava um ruído ao sinal para
para diminuir a exatidão das localizações. Contudo em
maio de 2000 essa característica foi eliminada, melhorando a exatidão dos GPS civis.
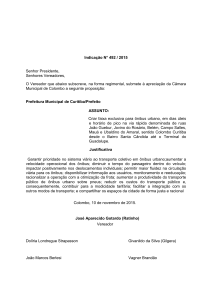
Módulo Receptor GPS Trimble
Os módulos de GPS são bastante sensíveis. Porém, devido à extrema atenuação dos sinais,
eles
es necessitam de um amplificador de RF e de uma antena externa específica.
O microprocessador realiza uma série de filtros digitais além de outras técnicas para extrair a
informação dos satélites que chegam com ruídos e com grande atenuação.
Dessas informações
ções é extraída a localização, entre muitas informações disponíveis, e
repassado ao mundo externo através da etapa de interfaceamento.
Figura 2 - GPS Utilizado
8
Figura 3 - Diagrama de blocos Módulo GPS Trimble
Funcionamento do Módulo GPS
Ao ser inicializado, o GPS provavelmente não terá nenhuma informação válida. Por isso ele
deve executar as seguintes funções:
Receber o sinal de conjunto de pontos da órbita prevista + a diferença de clock ou
almanaque;
Receber sinal dos satélites;
Decodificar as informações;
Transformar as informações em localização, altitude, velocidade, e sincronismo de
relógio;
Repassar essas informações ao mundo exterior;
Repetir a partir do passo 2.
Para efetuar a localização, o sistema
sistema GPS necessita de, no mínimo, quatro satélites por um
motivo simples: os sinais percorrem cerca de 300 metros em um micro segundo. A estabilidade dos
cristais usados nos receptores de GPS está casa de micro segundos, o que torna muito elevado o erro
de posição devido à diferença dos relógios. Contudo, ao utilizar um quarto satélite, os receptores do
GPS se sincronizam com os relógios atômicos dos satélites. Dessa maneira a estabilidade fica em
torno dos nano segundos, diminuindo consideravelmente o erro.
er
A recepção do almanaque pode ser bem demorada. Dependendo da situação de recepção,
podem ser necessários vários minutos. Durante esse tempo o módulo de GPS não é capaz de realizar
uma medida de localização.
9
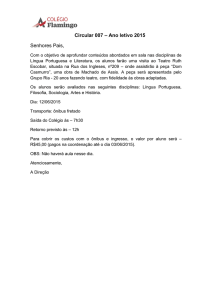
Módulo GPRS
A rede de telefonia celular GSM atual teve suas taxas de transferência de dados
aumentada devido à tecnologia GPRS. Ela permite o transporte de dados por pacotes por comutação
de pacotes, oferecendo assim, elevadas taxas de transferências que as tecnologias anteriores que
utilizavam comutação
mutação por circuito. A informação é dividida em pacotes relacionados entre si antes de
ser transmitida e remontada no destinatário.
A comutação por pacotes é estabelecida de forma diferente que a comutação por
circuito, pois, a mesma não é estabelecida do
do ponto de origem da transferência de dados ao destino.
Na comutação por circuito todos os recursos da rede são dedicados por toda a duração da chamada.
Com a tecnologia GPRS o serviço este sempre ativo, e os recursos da rede só são utilizados quando o
usuário
ário for enviar ou receber dados. Pelo fato de estarem sempre conectados e a disponibilidade
imediata é uma característica muito importante para aplicações críticas como autorização remota.
Com esse
sse uso eficiente de recursos, um grande número de usuários G
GPRS pode
potencialmente compartilhar a mesma largura de banda e serem servidos de uma única célula. O
número atual de usuários suportados depende da aplicação em uso e de quanta informação que está
sendo transferida. Dada a eficiência do GPRS, há menor necessidade
necessidade de investir em recursos que
serão somente utilizados em horários de pico. Portanto, GPRS permite que as operadoras maximizem
o uso de seus recursos de rede de uma forma dinâmica e flexível.
A rede GPRS permite uma funcionalidade completa com a int
internet móvel por ter
interoperabilidade entre a internet convencional e rede GPRS. Qualquer serviço utilizado na internet
está disponível também através da rede móvel celular com GPRS. A navegação na web através da
rede GPRS é fácil pelo fato dos protocolos em uso serem os mesmos. As redes GPRS podem ser
encaradas como sub-redes
redes da Internet e os telefones GPRS-compatíveis
GPRS compatíveis podem ser vistos como nós
móveis dessa rede. Isso significa que cada terminal GPRS pode potencialmente ter seu próprio
endereço IP e ser endereçável
ndereçável por isso.
Figura 4 - Módulo GPRS Utilizado
10
PROCEDIMENTOS DE TESTES E VALIDAÇÃO DO PROJETO:
O projeto será desenvolvido em etapas e principais módulos. Cada módulo será testado
separadamente e, finalmente, todos integrados.
Para o teste do funcionamento do módulo GPS será utilizado, como referência, o
software Google Earth e um aparelho GPS convencional do mercado. Primeiramente, o GPS está
ligado a uma interface em software de instrumentação virtual da National Instruments, o Labview.
Esta interface foi criada para facilitar a leitura dos dados oriundos do GPS. Como o sistema será
utilizado em veículos, serão feitos alguns testes em carro de passeio em locomoção e os valores lidos
serão armazenados pelo Labview. Este é o objetivo maior desta interface.
Outro passo é o teste do módulo GPRS, onde serão feitos testes de funcionamento e
controle do aparelho. Testes de funcionamento, envio de comandos, mensagens SMS, envio e
recebimento de pacotes TCP/IP.
Antes de concluir os testes com o GPRS, o software para o micro-controlador será
desenvolvido e testado juntamente com o GPRS. Também testes de comunicação entre dois módulos
GPRS, envio de dados de um para o outro e vice versa. Após conclusão desses testes e comprovado o
funcionamento, entrará o GPS em funcionamento novamente.
O GPS envia dados para micro-controlador que envia para o GPRS. Este envia para outro
módulo GPRS e traduzido em micro-controlador ou um computador convencional.
Com os três módulos interagindo, será feito outro ou outros testes em campo. O kit será
testado em movimento, com um carro em movimento, e os dados serão armazenados e anotações
serão feitas, como por exemplo, a velocidade do carro, trajeto verificado pelo Google Earth e GPS
comercial. Outro kit com os três módulos ficará em laboratório simulando uma central que recebe os
dados do carro e processa localização e tempo estimado para retorno, sendo que o caminho já foi
pré-estabelecido. Este teste validará o projeto, entretanto, um teste final almejado é um teste real
em ônibus da rede de transportes urbanos da cidade de Curitiba.
O teste realizado com o carro é o parâmetro de sucesso do projeto. O teste consiste em
definir uma rota, estabelecer um tempo para o percurso. Na segunda volta, serão criados improvisos
e testando assim a capacidade do sistema de atualizar e estimar um novo horário de chegada.
11
MÓDULO MÓVEL
O módulo móvel é composto de três equipamentos. GPS – Micro Controlador –
GPRS. Eles interagem da seguinte maneira:
Figura 5 - Funcionamento Módulo Móvel
GPS
O GPS recebe o sinal dos satélites e a cada meio segundo transmite pela porta
serial (taxa de 4800bps) as informações. Esse modelo da Trimble está configurado para
transmitir três mensagens:
$GPZDA,122342.44,10,12,2007,,*6F
$GPGGA,122342.00,2526.9955,S,04914.9689,W,1,03,2.12,00872,M,-000,M,,*40
$GPVTG,000.0,T,015.8,M,000.0,N,000.0,K,A*2F
Essas mensagens seguem o protocolo NMEA 0183 [8] e sempre seguem a mesma
ordem de informações. Esse protocolo garante que as mensagens são entregues sempre na
mesma ordem e sempre com uma vírgula entre cada informação. A vírgula é um parâmetro
importante, pois quando o equipamento não consegue captar as informações do satélite
somente as vírgulas são transmitidas. Com isso, o software implementado no PIC (Micro
controlador) conta as vírgulas para buscar as informações úteis ao projeto. Informações
como altitude, número de satélites foram descartadas.
12
GPRS
O GPRS é o link entre o módulo móvel e o servidor, é a interface de saída de dados.
A configuração do módulo é feita quando o veículo entra para a rota, ou seja, quando ele sai
da garagem (no caso de ônibus) e se encaminha para a linha que ele fará. A configuração
consiste em habilitar as mensagens de status do comando. Com isso, depois de cada
comando configurado o módulo transmite uma mensagem de OK quando comando recebido
com sucesso e ERROR quando o comando recebido não foi interpretado corretamente ou
há falha na configuração. Quando o módulo é iniciado ele faz algumas rotinas de testes e
transmite mensagens se os testes forem bem sucedidos, logo, o primeiro teste do software é
verificar se a rotina de testes do módulo foi bem sucedida (checar porta serial, checar sinal,
e outras). Todas as mensagens são enviadas pela porta serial do módulo. A taxa de
comunicação é de 115200bps, bastante alta para uma porta serial.
!"# $
%&'%()%*
($+ !%*),*
+,-+,-*)$*
./)'0$
,!1 %*
#$.%!)$
!8$
%&'%()%*
(,-2$-+%*)$*
./)'0$
(,-2$-+%*
$34
-.
,!1 %*
2(/5 .$-*
#$.%!)$-
#$!6 &'(%78$*
$34
+,(. !%*$*
2($&(%.%*,*
%#,!),*0,)*
1,(.,09$
,!#,((%*
($+ !%
6.
Figura 6 - Fluxograma da Configuração do Módulo GPRS
Devido à alta velocidade da porta serial algumas mudanças ocorreram no software
para que as mensagens de status fossem recebidas e interpretadas corretamente pelo PIC.
13
A principal mudança do software consiste em habilitar a interrupção da porta serial do
software, isso garante que nenhum dado será perdido, mas sim, armazenado em uma
variável.
PIC – Micro Controlador (Software)
O PIC é a interface que gerencia e comanda o GPS e o GPRS. Inicialmente o cristal
(clock) era de 4MHz, contudo, devido à alta taxa de comunicação pela porta serial (RS232)
com o módulo GPRS (115200bps) o clock foi alterado para um cristal de 20MHz. Essa
alteração no cristal fez com que o PIC 16F877A executasse as linhas de comando cinco
vezes mais rápido. A idéia do software é bastante simples, abaixo ela é exemplificada:
Figura 7 - Fluxograma do Software do PIC
O módulo móvel possui uma operação bastante simples para que não dependa do
operador (motorista). Com isso, o software precisa gerenciar os erros durante a
configuração do GPRS e os demais que podem ocorrer na recepção dos dados do GPS.
Nessa filosofia o protótipo ficou com o botão de reinício (reset) e de permanência de
rota. O botão de reset deve ser pressionado sempre que houver algum erro, nesse caso um
LED vermelho se acenderá. Caso não haja erro algum o LED verde permanecerá aceso e
um LED amarelo fica piscando para informar que o programa não está travado. Quando o
14
veículo estiver saindo de linha e voltando para a garagem uma chave deverá ser mudada de
posição. Nessa transição da chave, o software inicia o processo de encerramento de socket
com o servidor. Esse é um fator importante, pois é através do socket que o servidor verifica
se o ônibus está operante ou não. Para informar que o socket foi encerrado e o módulo
móvel
óvel pode ser desligado todos os LED acendem e permanecem acesos.
Testes confirmaram o uso do módulo móvel em baterias de 12V. Para sintetizar o
uso, uma placa fonte foi criada e pode ser observada abaixo. Testes em baterias de
automóveis ainda serão feitas
feitas e necessitarão de um circuito mais preciso e com filtros. A
placa fonte possui os LED de indicação e três reguladores de tensão. Um para cada
equipamento, ou seja, o GPS, PIC e GPRS.
Figura 8 - Placa HexKIT 16F877 e Placa de LEDs
LEDs e Alimentação
Como o GPRS e GPS utilizam interface serial de comunicação, foi necessário criar
outra saída serial para o PIC. O PIC possui uma serial implementada em seu hardware.
Logo, a saída encontrada foi utilizar um software que gerencia outra por
porta serial. O software
utilizado foi baseado no software publicado no livro Microcontroladores PIC - Programação
em C [9]. No livro há o programa pronto para a velocidade de 9600bps, no protótipo a
velocidade usada é de 4800bps (taxa do GPS), logo, alterações
alterações foram feitas para o perfeito
funcionamento.
A mudança do cristal do PIC trouxe mudanças ao software de gerenciamento do
módulo móvel. Primeiramente, o software que gerenciaria as informações oriundas do GPS
armazenaria 200Bytes na memória EEPROM do PIC e depois varreria essa memória em
busca das informações úteis. Em testes essa lógica era bastante funcional, mas quando
ligado ao GPS muitos dados eram perdidos e problemas no software que trata serial
15
apareceram. A mudança do cristal deixou as operações do PIC cinco vezes mais rápida com
isso uma nova lógica no programa que trata os dados do GPS pode ser implementada. O
gerenciamento dos dados ficou dinâmico, ou seja, a partir que um Byte era recebido ele já
era tratado. Essa lógica só pode ser implementada devido à velocidade do clock e
alterações no software que gerencia a serial que comunica com o GPS. A transmissão bit a
bit foi verificada e alguns parâmetros alterados para que o PIC tivesse tempo hábil de
checar os dados recebidos pelo GPS e tomar as decisões necessárias.
O PIC está programado a ler os dados do GPS e transmitir o pacote de informações
a cada quinze segundos aproximadamente. Para viabilizar o projeto financeiramente, as
informações não necessárias ou de redundância foram retiradas, assim, criou-se um
protocolo de comunicação e envio de dados cuja mensagem não possui mais que cinqüenta
bytes.
16
SERVIDOR
Introdução Teórica ao C++ Builder
O C++ Builder é um ambiente de desenvolvimento para aplicações cliente/servidor
produzido pela Borland, tradicional empresa desenvolvera de compiladores. O C++ Builder
utiliza os conceitos de programação visual e dirigida por eventos para proporcionar uma
ferramenta RAD (Rapid Application Development) extremamente poderosa, que permite
desenvolver aplicações eficientes rapidamente. Algumas de suas características mais
marcantes são:
Uso de uma biblioteca de componentes visuais, a VCL (Visual Components Library),
desenvolvida originalmente para o Delphi, ferramenta produzida pela mesma
empresa com características semelhantes ao C++ Builder, só que utilizando a linguagem
Object Pascal como linguagem base.
Orientação a objetos: o C++ Builder utiliza a linguagem de programação orientada a
objetos C++, onde se podem utilizar plenamente os conceitos de POO (Programação
Orientada a Objetos) e obter os seus benefícios.
Possui um excelente ambiente de desenvolvimento (IDE) com ferramentas de
produtividade que auxiliam a programação, além de um ótimo depurador (debugger)
!"##$%"&'$()*$#$)+"("&,-.,/%"&'-)"%)"01/*"()+")programadores e controle de
versões.
Grande escalabilidade no acesso a banco de dados: pode acessar tabelas locais
dBase e Paradox, assim como SGBDs como MySQL, Informix, Sybase, Microsoft
SQL Server e Interbase.
Introdução Teórica ao Banco de Dados e Tabelas
O que é um banco de dados?
É um arquivo, que permite de maneira fácil e organizada acessar as informações
contidas nele. Atualmente, possuímos cerca de 5% das informações do site armazenadas
em um banco de dados. Nós utilizamos o melhor banco de dados gratuito do mercado, o
MySQL.
Sistema de banco de Dados
Um sistema de banco de dados é um ambiente de hardware e de software, composto
por dados armazenados em um banco de dados (BD), o software de gerência do banco de
dados (SGBD) e os programas de aplicação.
Dentro dos Bancos de Dados ficam as tabelas (como se fossem as categorias da
estrutura dos dados) e nessas tabelas ficam as informações, dentro dessas tabelas é que
ficam as informações, é uma ideologia de organização de dados, para facilitar nossa vida.
17
A plataforma do banco de dados utilizado no projeto foi o MySQL, pois e gratuito e
de fácil integração com diversos aplicativos ou de softwares de gerenciamento de conexão,
é também rápido e flexível o suficiente para permitir armazenar logs e figuras nele. As
principais vantagens do MySQL são velocidade, robustez e facilidade de uso, trabalha com
diferentes plataformas, Unix, Windows etc.
Relacionamentos entre Tabelas
Em um banco de dados, precisamos de alguma maneira para representar estes
relacionamentos da vida Real, em termos das tabelas e de seus campos. Isto é possível
com a utilização de "Relacionamentos entre tabelas", os quais podem ser de três tipos:
Um para um;
Um para vários;
Vários para vários.
Relacionamento do Tipo Um para Um:
Esta relação existe quando os campos que se relacionam são ambos do tipo Chave
Primária, que é um código único que identifica cada registro, em suas respectivas tabelas.
Cada um dos campos não apresenta valores repetidos.
Cada campo da tabela se relaciona com um único campo contido na outra tabela.
Quando fosse necessário buscar as informações tais como nome, endereço, etc, estas
podem ser recuperadas através do relacionamento existente entre as duas tabelas,
evitando, com isso, que a mesma informação tenha que ser duplicada nas duas tabelas,
inclusive aumentando a probabilidade de erros de digitação.
Relacionamento do Tipo Um para Vários:
Este é, com certeza, o tipo de relacionamento mais comum entre duas tabelas. Uma
das tabelas (o lado um do relacionamento) possui um campo que é a Chave Primária e a
outra tabela (o lado vários) se relaciona através de um campo cujos valores relacionados
podem se repetir várias vezes.
Considere o exemplo entre a tabela Clientes e Pedidos. Cada Cliente somente é
cadastrado uma única vez na tabela de Clientes (por isso o campo Código do Cliente, na
tabela Clientes, é uma chave primária, indicando que não podem ser cadastrados dois
clientes com o mesmo código), portanto a tabela Clientes será o lado um do relacionamento.
Ao mesmo tempo cada cliente pode fazer diversos pedidos, por isso que o mesmo Código
de Cliente poderá aparecer várias vezes na tabela Pedidos: tantas vezes quantos forem os
pedidos que o Cliente tiver feito. Por isso que temos um relacionamento do tipo Um para
Vários entre a tabela Clientes e Pedidos, através do campo Código do Cliente, indicando
que um mesmo Cliente pode realizar diversos (vários) pedidos.
Relacionamento do tipo Vários para Vários:
18
Este tipo de relacionamento é utilizado quando temos uma situação onde em ambos
os lados do relacionamento os valores poderiam se repetir. Vamos considerar o caso entre
Produtos e Pedidos. Posso ter Vários Pedidos nos quais aparecem um determinado
produto, além disso, vários Produtos podem aparecer no mesmo Pedido. Esta é uma
situação em que temos um Relacionamento do Tipo Vários para Vários.
Na prática não é possível implementar um relacionamento deste tipo, devido a uma
série de problemas que seriam introduzidos no modelo do banco de dados. Por exemplo, na
tabela Pedidos teríamos que repetir o Número do Pedido, Nome do Cliente, Nome do
Funcionário, Data do Pedido, etc para cada item do Pedido.
Para evitar este tipo de problema é bastante comum "quebrarmos" um
relacionamento do tipo vários para vários em dois relacionamentos do tipo Um para Vários.
Isso é feito através da criação de uma nova tabela, a qual fica com os lados vários dos
relacionamentos. No nosso exemplo vamos criar a tabela Detalhes do Pedido, onde ficam
armazenadas as informações sobre os diversos itens de cada pedido, aí ao invés de termos
um relacionamento do tipo Vários para Vários, teremos dois relacionamentos do tipo um
para vários.
DRIVER OBDC
Para que o MySQL se conecte com o C++ Builder é necessário a instalação de um
Driver OBDC (Open DataBase Connectivity), que é um método de acesso a Banco de
Dados desenvolvido pela Microsoft, com a finalidade de tornar possível acessar qualquer
dado de qualquer aplicação independentemente do Banco de Dados usado.
FERRAMENTAS DE CONEXÃO C++ BUILDER COM O MySQL
O C++ Builder oferece uma série de ferramentas e recursos que possibilitam a
criação de aplicações de bancos de dados de forma rápida e fácil.
O coração das aplicações de bancos de dados do C++ Builder está no Borland
Database Engine (BDE), uma camada de software que realiza o acesso a bancos de dados
baseados em arquivos como Paradox e dBase ou a servidores de bancos de dados locais
ou remotos como MySQL e etc. Os componentes de bancos de dados do C++ Builder
oferecem uma forma simplificada, que usa programação visual baseada em PME
(Propriedades, Métodos e Eventos), para acessar a API do BDE.
Há duas grandes classes de componentes: os componentes de acesso a dados
(data-access) e os componentes de controle, visualização e manipulação dos dados (datacontrols), sendo que os componentes de visualização e manipulação de dados são também
denominados de componentes data-aware (componentes capazes de mostrar e atualizar os
dados armazenados em uma tabela associada). Estes dois grupos de componentes estão
19
localizados, respectivamente, nas páginas Data Access e Data Controls da paleta de
componentes do C++ Builder.
Os principais componentes do tipo data-access utilizados na criação de aplicações
com bancos de dados em C++ Builder são os componentes derivados da classe abstrata
TDataSet, que são: Table da classe TTable, Query da classe TQuery e StoredProc da
classe TStoredProc.
Qualquer um dos componentes derivados da classe TDataSet podem ser
referenciados como datasets. Os componentes Query e StoredProc são mais utilizados em
aplicações cliente-servidor e serão vistos posteriormente. O componente Table oferece a
forma mais simples de se acessar informações em uma tabela de banco de dados do que a
Query
Um dataset possui um conjunto de estados onde pode se encontrar. Os estados
possíveis são:
Estado
Descrição
Inactive
Dataset encontra-se fechado
Browse
Estado no qual o dataset se encontra aberto, permitindo leitura, porem não
permitem ser alterados ou inseridos.
Edit
Permite a edição ou alteração do registro corrente.
Insert
Permite que uma nova linha ou registro seja inserido. Após a chamada do
método Post, uma nova linha é gravada na tabela e o dataset volta ao estado
Browse.
SetKey
O estado no qual o dataset se encontra quando o mesmo é aberto e
permanece a maior parte do tempo de seu uso. Registros podem ser lidos,
mas não alterados
ou inseridos.
CalcFields Estado que ocorre quando um campo calculado está sendo atualizado.
Uma aplicação pode posicionar um dataset em determinado estado através de uma
chamada explícita a um método ou através da ocorrência de um evento que desencadeie
uma troca de estado. Há métodos que sempre levam para determinado estado e são
chamados métodos correspondentes aos estados. São eles: Edit, Insert, Append e Setkey.
Outro conjunto de métodos sempre retorna o dataset para o seu estado de Browse como
Delete, Cancel, GotoKey e GotoNearest. Há casos em que o sucesso ou insucesso do
método define se o dataset volta ao estado de Browse, como o método Post.
O diagrama de estados da Figura 10 mostra os possíveis estados de um dataset e os
métodos que causam as trocas de estado para outro.
20
Figura 9 – Diagrama de estados de um dataset
O componente Table é a interface entre o Borland Database Engine e os
componentes DataSource O componente DataSource por sua vez oferece a interface para
os componentes data-aware. que irão compor a interface com o usuário. Trabalhando-se
com o componente Table usa-se a propriedade DatabaseName para especificar o banco de
dados a ser acessado; a propriedade TableName serve para indicar a tabela a acessar;
utiliza-se a propriedade IndexName para definir o uso de um determinado índice com a
tabela; configura-se a propriedade Active para True ou chame-se o método Open para abrir
o dataset, colocando ele no estado Browse; coloca-se a propriedade Active em False ou
chame-se o método Close para fechar o dataset.
O componente DataSource é a interface entre um componente dataset e os
componentes data-aware nos formulários. O DataSource liga-se a um dataset através da
propriedade Dataset.
Os componentes Data-aware, como DBEdit e DBGrid, ligam-se ao DataSource
através de suas propriedades DataSource. Usualmente há apenas um DataSource para
cada dataset, no entanto podem-se conectar a um dataset tantos DataSource quantos forem
necessários. Para monitorar-se alterações no estado do dataset associado ao DataSource
pode-se associar um método ao evento OnStateChange.
Há vários componentes do tipo data-controls no C++ Builder, como DBGrid que
permite a visualização, alteração e navegação no conjunto de todos os registros e campos
de uma tabela; o DBText que mostra os dados em um campo de uma tabela como um label
read-only similar ao componente Label; o DBEdit usado para apresentar e alterar os valores
de um campo numa caixa de edição similar a um componente Edit; o DBImage que
apresenta gráficos e figuras do tipo bitmap armazenados em um campo do tipo BLOB
21
(Binary Large Object), de forma semelhante ao realizado pelo componente Image; e o
DBNavigator que oferece um conjunto de botões para navegar pelas linhas de um dataset,
adicionar ou eliminar uma linha, colocar o dataset no estado de edição, confirmar ou
cancelar as alterações realizadas no dataset ou recarregar os dados do disco, atualizando o
dataset.
MODELAGEM DE BANCO DE DADOS
Antes da implementação do banco de dados, foram estabelecidas algumas
perguntas básicas que seriam utilizadas para consultas do sistema e para obter os dados
para o cálculo estimado do próximo ônibus a estação.
Primeiramente o banco de dados foi esboçado no Microsoft Excel com tabelas
básicas e com alguns campos considerados de suma importância. Com o de correr do
projeto, foram feitas análises e questionamentos sobre o relacionamento entre as tabelas e
dados contidos nelas para as futuras consultas do sistema e para evitar a duplicidades entre
campos e dados das tabelas.
Devido a essa maior análise e modelagem do banco de dados, a cada nova idéia o
número de tabelas foram aumentando e ficando mais complexas em seus relacionamentos,
havendo a necessidade da utilização de um software especifico e apropriado para a
modelagem do banco, o DBDesigner, da fabFORCE, que é um software open-source e de
uso gratuito. Este software nos fornece uma interface gráfica e de análise do banco de
dados assim como a dependência entre as tabelas e seus respectivos campos.
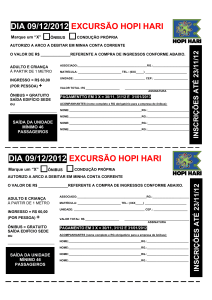
Na primeira modelagem, foram construídas seis tabelas, Figura 11, na qual a tabela
ônibus que conteria os dados do ônibus como código, tipo e telefone. Tabela estação com
informações sobre a estação ou terminal de conexão entre as linhas, tabela linha que definia
quais seriam as linhas do sistema de transporte e sua rota, ida ou volta na linha. A tabela
tempos que armazenaria os dados referente em todos os ônibus e sua respectiva linha e
seu tempo gasto entre as estações. Tabela log na qual ficaria responsável pela status de
conexão, online ou off-line, entre o módulo móvel GPRS e o servidor, e tabela aviso que
armazenaria os dados transmitidos de todos os ônibus do sistema do sistema em todo seus
percurso.
22
Figura 10 – Primeira modelagem do banco de dados
A modelagem intermediária do banco surgiu com a necessidade da
implementação de algumas consultas do sistema, como a identificação de quais os ônibus
de uma respectiva linha, quais os ônibus que estavam off-line, quais estações de uma linha
e etc. Então para que essas consultas fossem realizadas foi criado mais tabelas e mais
campos que estivessem se relacionando, para evitar assim a duplicação dos dados ou não
igualdade em cada cadastro da tabelas, pois com o relacionamento esses dados seriam
linkados (ligados) através de um campo identificador único.
Nessa segunda modelagem, Figura 12, nenhuma tabela permaneceu igual a da
primeira modelagem, a tabela ônibus foi acrescentada o campo de código de linha, na qual
se relaciona com a tabela linha através do seu código único de identificação (chave
primaria). Na tabela linha foi retirada o código de rota, pois a mesma será relacionada
através da tabela rota, pelo sua chave primaria. A tabela estação também teve alguns
campos retirados, como as coordenadas obtidas do GPS, pois a tabela irá relacionar com a
tabela pontos através do seu código de identificação, evitando assim a inserção de dados
diferentes. A tabela pontos possui também o código identificador de rota, obtido do
relacionamento da tabela rota. Por último, a tabela dados, que é onde será registrado todo o
sinal enviado pelos ônibus da frota, seus campos são de data, hora, código do ônibus, se o
ônibus esta com problema, fora de rota, off-line e etc, assim como as coordenadas e
velocidade atual; possui duas chave de relacionamento obtidos através da tabela ônibus e
da tabela rota.
23
Figura 11 – Segunda modelagem do banco de dados
Com o decorrer do projeto, algumas consultas precisaram ser implementadas no
sistema, na qual algumas delas seriam de suma importância para o calculo estimado do
próximo ônibus em uma estação da linha. Porém para que algumas dessas consultas
fossem idealizadas houve uma necessidade de alteração na modelagem do banco de dados
devido ao relacionamento entre as tabelas e seus campos, assim como que algumas
tabelas serem dinâmicas e estáticas. As tabelas estáticas, ônibus, estação, rota, linha e
pontos, teriam seus dados inseridos uma única vez, servindo assim como histórico mesmo
se algum registro fosse desativado. Já as tabelas dinâmicas, seriam alimentadas de forma
contínua, em que poderiam seus campos poderiam ser alterados ao longo do dia ou
período. Com isso o banco sofreu mais algumas mudanças em sua modelagem, conforme a
Figura 12, na qual mostra que algumas tabelas como ônibus, estação, rota e linha tem
apenas dados básicos de cadastro e sua chave primaria, na qual se relaciona com as outras
tabelas tendo uma dependência desses dados. Com isso um ônibus, rota, linha ou estação
pode sair de operação mais seus históricos preservados no sistema.
24
Figura 12 – Terceira modelagem do banco de dados
SERVIDOR DE CONTROLE DE TRAFEGO DO TRANSPORTE
COLETIVO
O software do servidor é responsável pelo gerenciamento de todo o sistema de
tráfego e controle dos ônibus, é ele que recebe os dados enviados por todos os ônibus, é
onde são cadastrados ônibus, rota, linha, estação e demais informações. Sendo também a
interface de conexão entre o usuário e o banco de dados MySQL.
Funcionamento Lógico Geral
A Figura 14 demonstra o funcionamento geral do sistema, que é composto por um
banco de dados MySQL, componentes básicos de socktes internet e um software local
desenvolvido em C++ Builder. O Software local servirá de interface entre o banco de dados
e o usuário do sistema, nas consultas, cadastros, alterações e exclusões de registros de
dados do sistema do transporte coletivo.
25
Figura 13 – Fluxograma geral do Servidor
Funcionamento do Software
O Software é responsável pelo recebimento da mensagem enviada pelo módulo
móvel GPRS contido em todos os ônibus da frota, informando seu código, data, hora,
velocidade e coordenadas atual. Esses dados são transmitidos na rede celular GSM através
do serviço de GPRS pelo padrão TCP/IP, esses dados chega ao servidor através da internet
26
por sockets. Esses sockets são definidos através de uma porta estipulada tanto no módulo
móvel, quanto no software servidor, sem isso a conexão não se efetuará como mostra o
fluxograma da Figura 15. O C++ Builder possui alguns componentes de criação do servidor
socket ou cliente socket.
Figura 14 – Fluxograma da conexão socket
Após estipulada e ativada essa porta, o servidor fica em modo de espera da
conexão, quando ocorre a conexão entre servidor e módulo móvel, é transmitido à
mensagem. O servidor recebe essa mensagem através de uma Edit Box e logo em seguida
separa em seis novas mensagens. Sendo elas: código do ônibus, hora, data, latitude,
27
longitude e velocidade. Depois de separada essas novas mensagens o sistema chama o
banco de dados MySQL e as insere na tabela dados, Figura 16.
:;<=>
%?@A*<>:ABC>*<>D*
.E-F0
-..&$/&$/)!""/.$
0/"!$1!$2/1&"
!"#!$"!$%&'(!$
)&*!+,&
DE9
ABC
-"#/3!4!)!$
)&*!+,&$)&5$
0/"!
67'/.1/$1/1&"$
1&"$20-28#
93#:5$
"#.8*7$
!*(8/1/
-*;'/*#&$*,&$
!*)&*#./.$<=>
ABC
DE9
2!")/.#/$)/./)#!.
-*;'/*#&$*,&$
!*)&*#./.$<?>
2!")/.#/$)/./)#!.
DE9
6.5/@!*/$
)/./)#!.
63.!$#/3!4/$2/1&"
6.5/@!*/$
1/1&"$*/$
#/3!4/
DE9
!"#/$"!$8*"!.8'
ABC
F!)%/$#/3!4/$
2/1&"
F85
Figura 15 – Fluxograma de inserção de dados à base
28
A tabela dados possui mais informações além das seis mensagens obtidas, como
problema e status do ônibus. Esses dois outros campos são obtidos através de uma
consulta do último dado enviado ao servidor, se o mesmo estou o tempo de envio da
próxima mensagem no caso do campo status e no campo problemas através de consulta se
o ônibus esta fora de rota, entre outras.
A inserção desses dados no MySQL através do C++ Builder foi desenvolvida
utilizando a ferramenta Builder através de alguns componente como o Database que
fornece o acesso à base de dados, UpdateSQL responsável pela atualização dos registros
da tabela, Query componente que faz a consulta à base de dados, Table permite a consulta
e edição de registro na base, e DataSource que é componente de acesso as tabelas.
O servidor possui diversos formulários, janela principal, Figura 17, que fornece uma
tabela com as dados recebidos de cada módulo móvel, menus de acesso a cadastro e
consulta de ônibus, rota, linha estações, e também do acesso as consultas dos sistemas
através dos botões. Um formulário de dados, onde são inseridos os componentes de acesso
ao banco de dados ao MySQL acima descritos. E demais formulário de cadastro, inserção,
alteração, exclusão e consulta como ônibus, rota, linha, estação, pontos e etc.
Figura 16 – Formulário principal
Nos formulários de cadastro foi utilizado o componente DBEdit da página data
controls que é usado para receber dados do usuário e atribuí-los ao campo de um registro
de uma tabela, conforme Figura 18. Os campos são verificados se estão corretos e se não
estão faltando antes que o comando de inserção ao banco de dados.
29
Figura 17 – Formulário de cadastro e consulta
O componente DBGrid também da página data controls, exibe um objeto semelhante
a uma planilha do EXCEL que nos permite manipular registros de uma banco de dado, ou
seja, de um componente Table ou Query, toda vez que esse formulário é aberto ele carrega
os registros do sistema. Informando um erro quando não consegue o acesso a tabela.
Nos formulários de consultas existem rotinas em SQL que faz a localização de um
determinado registro com informações obtidas através dos Edit Box preenchida pelo usuário
do sistema, sempre verificando se houve a conexão com a tabela e informando erro se
houver. Os comandos de consultas em SQL são adicionados na string para depois serem
executados. Porém, duas consultas não funcionam dessa forma, pois os comandos
enviados para criar tabelas temporárias não tiveram êxito. Para contornar esse problema
houve a necessidade de fazer outra modelagem no banco de dados do sistema, conforme
descrito anteriormente através das tabelas dinâmicas.
CONSULTAS DO SISTEMA
Foram estabelecidas algumas consultas no sistema para verificar os históricos de
informações que ocorreram eu uma determinada data ou situação do ônibus. Essas
consultas foram realizadas utilizando a linguagem SQL, Structured Query Language, A SQL
é uma linguagem de alto nível. Um aplicativo não diz ao mecanismo de banco de dados
como deve executar uma tarefa, mas enuncia o que o resultado deve conter.
Uma consulta é uma pergunta que um aplicativo faz a um banco de dados e depois
retorna registros. As consultas retornam um conjunto de registros que satisfazem a alguns
critérios e contêm informações de campos selecionados.
Ao falar sobre consultas, considere toda instrução SQL como uma pergunta. O
resultado conseguido é a resposta que o mecanismo de banco de dados dá. Existem
30
algumas instruções SQL que são simplesmente um comando. Para esse comando, você
não receberia um resultado. Entretanto, para perguntas ou consultas, um resultado é o
conjunto de registros retornados pelo mecanismo de banco de dados.
Por serem uma linguagem de alto padrão essas consultas foram pré-determinadas e
inseridas dentro do código de programa do servidor, portanto cabe ao usuário somente a
inserção de alguns campos determinados para ter o resultado da consulta.
Algumas das consultas realizadas são:
1234567-
QUAIS ÔNIBUS ESTÃO OFFLINE?
QUAL FOI O PROBLEMA NO DIA 00 DO ÔNIBUS X?
NA LINHA X EXISTEM QUAIS ÔNIBUS?
QUAIS ÔNIBUS PASSAM NA ESTAÇÃO W?
QUAIS SÃO AS ESTAÇÕES DA LINHA Y?
ONDE ESTÁ O ÔNIBUS X AGORA?
QUAL É A COORDENADA DA ESTAÇÃO W?
A tabela abaixo mostra as perguntas e os campos que serão fornecidos e os obtidos
nas consultas:
o
N.
Pergunta?
Dados Fornecidos
QUAIS ÔNIBUS ESTÃO OFFLINE?
status
QUAL FOI O PROBLEMA NO DIA 00 DO data
Campo de Resultado
data
max
(curdate)
(hora)
ônibus
status
ônibus
ônibus
problema
ÔNIBUS X?
NA LINHA X EXISTEM QUAIS ÔNIBUS?
data
QUAIS ÔNIBUS PASSAM NA ESTAÇÃO data
ônibus
linha
estação
rota
ônibus
linha
W?
estação
QUAIS SÃO AS ESTAÇÕES DA LINHA linha
Y?
ONDE ESTÁ O ÔNIBUS X AGORA?
ônibus
data
max
(curdate)
(hora)
QUAL É A COORDENADA DA ESTAÇÃO estação
onibus
coordenada
coordenada
W?
Para cada uma dessas consultas efetuaremos query no banco de dado do MySQL,
usando o comando SELECT e ate mesmo tabelas temporárias.
A instrução SELECT é usada para recuperar informações de uma tabela. A forma
geral da instrução é:
SELECT o que mostrar
FROM de qual tabela
WHERE condições para satisfazer;
O que mostrar indica o que você deseja ver. Isto pode ser uma lista de colunas ou *
para indicar todas as colunas. De qual tabela indica a tabela de onde você deseja recuperar
os dados. A cláusula WHERE é opcional. Se estiver presente, condições para satisfazer
especificam as condições que os registros devem satisfazer para fazer parte do resultado.
31
1- QUAIS ÔNIBUS ESTÃO OFFLINE?
Para que essa consulta possa ser feita devemos que fornecer o status do ônibus, no
caso OFFLINE, data corrente e o ultimo evento enviado pelo ônibus, definido por max
(hora). A pesquisa retornará todos os ônibus, cujo estado status for igual à OFFLINE,
ordenado de forma crescente pelo código.
SELECT onibus_cod_onibus, linha_cod_linha ,max(hora) AS hora FROM dados
where status="offline" AND data_ ="CURDATE()" GROUP BY onibus_cod_onibus;
2- QUAL FOI O PROBLEMA NO DIA 00 DO ÔNIBUS X?
Nessa consulta, devemos informar a data e qual ônibus, no formato “PL000” ou “*”
para todos. Os dados de retorno são código do ônibus, linha, data, hora e o problema
encontrado.
SELECT onibus_cod_onibus, linha_cod_linha,data_, hora, problema FROM dados
where data_="data escolhida" AND cod_onibus=”X” ORDER BY cod_dados;
3- NA LINHA X EXISTEM QUAIS ÔNIBUS?
Forneceremos a data e a linha para efetivar esta consulta, retornando o código dos
ônibus como resultado. O comando DISTINCT tem como função de listar somente uma
única entrada de todos os ônibus.
SELECT
DISTINCT
onibus.onibus_cod_onibus
FROM
onibus,onliro
WHERE
data_2="data escolhida" AND onliro.onibus_cod_onibus=dados.onibus_cod_onibus AND
onliro.linha_cod-linha="X";
4- QUAIS ÔNIBUS PASSAM NA ESTAÇÃO W?
Para essa consulta precisamos fornecer a estação e data. O resultado da pesquisa
será o campo código do ônibus e a linha do mesmo.
SELECT DISTINCT onliro.onibus_cod_onibus FROM onliro,esliro,estacao WHERE
esliro.linha_cd_linha=onliro.linha_cod_linha
AND
esliro.estacao_cod_estacao=estacao.nome="estação escolhida";
5- QUAIS SÃO AS ESTAÇÕES DA LINHA Y?
Nessa consulta, é necessário fornecer a linha, retornando como resultado o nome
das estações.
32
SELECT
DISTINCT
estacao.nome
FROM
estacao,esliro
WHERE
esliro.estacao_cod_estacao=estacao.cod_estacao AND esliro.linha_cod_linha=”Y”;
6- ONDE ESTÁ O ÔNIBUS X AGORA?
Fornecendo o código do ônibus, data corrente (curdate), último dado enviado pelo
ônibus, definido pelo parâmetro max(hora). O resultado retornado será o código ônibus,
lat_g, lat_m, lat_s, lat_ms, lon_g, lon_m, lon_s, lon_ms, utilizando o parâmetro GROUP BY
onibus_cod_onibus para agrupar os dados pelo código do ônibus.
SELECT lat_g,lat_m,lat_s,lat_ms,lon_g,lon_m,lon_s,lon_ms FROM dados where
(onibus_cod_onibus="ônibus escolhido" AND data_ 2="CURDATE()");
7- QUAL É A COORDENADA DA ESTAÇÃO W?
Essa consulta o campo fornecido é o nome da estação, retornando os campos de
lat_g,lat_m,lat_s,lat_ms,lon_g,lon_m,lon_s,lon_ms.
SELECT
pontos.lat_g,pontos.lat_m,pontos.lat_s,pontos.lat_ms,pontos.lon_g,pontos.lon_m,pontos.lon
_s,pontos.lon_ms
FROM
estacao,espo,pontos
espo.pontos_cod_pontos=pontos.cod_pontos
WHERE
AND
espo.estacao_cod_estacao=estacao.cod_estacao AND estacao.nome="nome da estação";
CÁLCULO DO TEMPO ESTIMADO DO PRÓXIMO ÔNIBUS
O aplicativo também faz o cálculo do horário estimado da chegada do próximo ônibus
em cada estação determinada pela sua linha.
Para que o cálculo propriamente seja executado, é preciso primeiramente entrar com
o nome da estação, o sistema obtém o último dado enviado pelo ônibus, faz uma consulta
SQL procurando a qual linha ele pertence. Depois, o sistema faz uma varredura nos registros
de pontos das rotas cadastradas, para determinar a rota do ônibus na sua linha, ida ou volta.
Foi estabelecido um algoritmo de valor próximo nos pontos, pois o equipamento de GPS
utilizado não tinha uma precisão refinada, então o algoritmo buscava o valor mais próximo e
implementava um contador, assim q esse contador fosse incrementado cinco vezes a rota
era definida.
Após a rota ser determinada, era verificada na tabela distância, a distância entre as
duas estações, estação anterior e a próxima estação que o ônibus fará a conexão, tendo
33
esse valor, o calculo do tempo era determinado pela distância entre as estações subtraídas
da distancia percorrida da estação anterior ate o ponto atual, dividido pela velocidade média
do trajeto.
Para que o tempo estimado inicial não fosse tão grande, devido à velocidade média
no começo do trajeto ser muito baixa, os primeiros valores da velocidade eram descartados
ate que a velocidade obter um valor mais estável, podendo ser verificado a linha lógica de
raciocínio através do fluxograma da Figura 19.
B*G)8&
L!.8K8)/$;'/4$
!"#/M,&
93#:5$H4#85&$1/1&$!*(8/1&$
I!4&"$J*83'"$1/$K.&#/
L!.8K8)/$48*%/$;'!$
J*83'"$I!.#!*)!
63.!$#/3!4/$P&I&
L/..!$#/3!4/$P&I&$/#:$
;'!$)&&.1!*/1/$/#'/4$
)&5$)/1/"#./1/?$"!$
DE9
N.O+85&$.!78"#.&
ABC
L!.8K8)/$;'/4$/$.&#/
93#:5$18"#Q*)8/$
!*#.!$!"#/MR!"
S/4)'4/$18"#/*)8/$
I!.)&..81/
S/4)'4/$ !5I&T
UV18"#W$!*#.!$!"#/MR!"X
18"#W$N!.)&..81/YZ
L!4W5:18/
-+83!$#!5I&
/I.&+85/1&
F85
Figura 18 – Fluxograma para o cálculo do tempo estimado de chegada do próximo ônibus
34
ALGORITMO DO CÁLCULO DO TEMPO ESTIMADO
O algoritmo do cálculo do tempo estimado do próximo ônibus necessita da
coordenada do ponto anterior transmitido e a da coordenada atual, ele transforma cada
ponto desses de graus para radianos, através da Fórmula 1 e 2 abaixo:
graus "
min utos segundos décimos de segundos
"
"
! valor em rad
60
3600
216000
(1)
Exemplo:
Latitude: 25º27`20``64```
!"
#
%
$'
"
"
) %*'''
$% &$%%
($%%%
Após transformação das coordenada anterior e da atual para radianos, faz-se o
cálculo da distância, em metros, entre esses dois pontos através da Fórmula 2.
D ! 1111200 ' ar cos%sen# p1$ ' sen# p 2$ " cos# p1$ ' cos# p 2$ ' cos# p1 ( p 2$&'
180
pi ()
(2)
Para cada coordenada transmitida, o algoritmo fará o cálculo da distância e
armazenará em um somatório todas as distâncias da estação anterior até ponto atual.
O algoritmo faz o cálculo da velocidade média do trecho através do somatório da
distância dividido pelo tempo desde estação anterior até ponto atual. Após obtido o valor da
velocidade média, ocorre o cálculo do tempo estimado, obtido através da subtração da
distância entre as duas estações pelo somatório da distância percorrida até ponto atual,
divididos pela velocidade média, conforme Fórmula 3.
tempo estimado !
distância entre estações ( ) distância percorrida
velocidade média
(3)
Cada dado novo transmitido obtém se um valor novo estimado do tempo, devido
a um novo valor obtido da distância percorrida e da velocidade média do trecho.
Para a verificação e validação do algoritmo foi efetuados em uma planilha de
cálculos do Microsoft Excel, inserindo todos as coordenada obtida no percurso da Linha 1
(Portão 1/ Portão 2), conforme tabela a baixo.
35
hora
113706
113710
113714
113718
113722
113726
113730
113734
113738
113742
113746
113750
113754
113758
113802
113806
113810
113814
113818
113822
onibus
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
data
271107
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
lat
g
25
27
27
27
27
27
27
27
27
27
27
27
27
27
27
27
27
27
27
27
lat
m
27
14
15
16
17
18
18
18
19
19
19
19
19
20
20
20
20
20
20
20
lat
s
20
45
47
0
55
66
93
73
16
47
58
78
97
33
43
47
39
55
66
66
49
49
49
49
49
49
49
49
49
49
49
49
49
49
49
49
49
49
49
14
14
14
14
14
14
15
15
15
15
15
15
15
15
15
15
15
15
15
99
99
99
99
98
99
0
2
3
4
5
6
7
8
9
10
10
10
10
lat lon lon lon
ms
g
m
s
64 49 15 10
52 19.5
42 10.4
45 17.2
29 23.4
91 16.2
31 15.1
46 21.4
17 20.4
37 18.5
15 13.3
28 19.1
43 20.4
56 17.5
62 14.3
59 14.5
29 07.6
71 06.7
74 00.0
73 00.0
lon
ms
vel
71 00.0
0,4443
0,4443
0,4443
0,4443
0,4443
0,4443
0,4443
0,4443
0,4443
0,4443
0,4443
0,4443
0,4443
0,4443
0,4443
0,4443
0,4443
0,4443
0,4443
lat
rad
0,4443
0,8598
0,8598
0,8598
0,8598
0,8598
0,8598
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
lon
rad
0,8596
0
5,1E-06
1,1E-06
9,4E-06
5,7E-06
2,2E-06
0,00017
6,6E-06
6,4E-06
2,9E-06
5,6E-06
5,7E-06
5,3E-06
4,9E-06
4,2E-06
2,3E-06
3,3E-06
9,2E-07
7,3E-08
2,2E-07
!
dist(m)
0,0000
0,0000
1,3888
1,3888
0,4651
1,8540
5,8324
7,6864
21,1898
28,8762
14,5406
43,4169
26,5756
69,9925
31,1081
101,1005
33,9953
135,0958
36,2089
171,3047
35,4607
206,7654
18,5490
225,3143
40,4669
265,7812
42,3284
308,1096
1080,7944
1388,9040
13,9001
1402,8042
36,5637
1439,3679
59,6690
1499,0369
6,8370
1505,8739
32,2553
4
4
4
8
4
12
4
16
4
20
4
24
4
28
4
32
4
36
4
40
4
44
4
48
4
52
4
56
4
60
4
64
4
68
4
72
4
76
4
t
19,2266
19,8141
20,8200
21,1672
21,9188
23,1484
5,5020
5,1112
4,6940
4,6992
4,2826
3,7527
3,1594
2,4997
1,8090
1,4438
0,4804
0,1545
0,1736
Vmedia
0,0000
171,52328
168,06528
160,27431
160,46418
156,62968
148,91038
822,9492
894,15008
982,22814
985,09601
1089,2023
1252,6696
1498,6557
1906,584
2649,2151
3329,4297
10050,528
31289,361
27847,861
!"
#DIV/0!
2,8587
2,8011
2,6712
2,6744
2,6105
2,4818
13,7158
14,9025
16,3705
16,4183
18,1534
20,8778
24,9776
31,7764
44,1536
55,4905
167,5088
521,4894
464,1310
t_min
113826
113830
113834
113838
113842
113846
113850
113854
113858
113902
113906
113910
113914
113918
113922
113926
113930
113934
113938
113942
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
26
26
26
26
26
26
27
27
27
27
27
27
27
27
27
27
27
27
27
27
96
96
97
97
98
99
0
1
1
1
2
3
4
5
7
9
10
11
11
13
47
32
5
89
64
49
39
6
26
68
52
18
38
85
27
2
36
21
89
16
49
49
49
49
49
49
49
49
49
49
49
49
49
49
49
49
49
49
49
49
15
15
15
15
15
15
15
15
15
15
15
15
15
15
15
15
15
15
14
14
4
3
3
2
1
1
1
0
0
0
0
0
0
0
0
0
0
0
99
99
17 04.8
44 13.3
6 15.2
55 16.0
94 16.5
36 15.1
3 17.0
94 06.7
95 01.2
96 14.0
89 12.3
82 13.4
74 23.3
61 23.1
50 26.4
40 28.9
28 15.7
9 10.1
95 21.0
67 23.9
0,4444
0,4444
0,4444
0,4444
0,4444
0,4444
0,4442
0,4442
0,4442
0,4442
0,4442
0,4442
0,4442
0,4442
0,4442
0,4442
0,4442
0,4442
0,4442
0,4443
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8598
0,8598
2,7E-06
3,8E-06
6,8E-06
3,2E-06
5,6E-06
0,00019
3,1E-06
1,6E-06
3,4E-06
3,6E-06
2,2E-06
6,5E-06
8,7E-06
5,1E-06
7,7E-06
7,6E-06
3,9E-06
0,00018
4,3E-06
7,3E-06
1538,1292
46,3461
1584,4753
27,4748
1611,9501
1128,2565
2740,2067
24,7931
2764,9997
48,7131
2813,7128
49,1278
2862,8407
32,3257
2895,1663
55,4156
2950,5819
41,3526
2991,9346
13,7751
3005,7096
22,8844
3028,5940
21,6271
3050,2211
10,3070
3060,5281
20,0219
3080,5500
1209,9121
4290,4620
35,5455
4326,0075
20,4925
4346,5000
43,5456
4390,0456
24,5073
4414,5529
17,1733
4431,7262
80
4
84
4
88
4
92
4
96
4
100
4
104
4
108
4
112
4
116
4
120
4
124
4
128
4
132
4
136
4
140
4
144
4
148
4
152
4
156
4
160
27,6983
28,2984
28,8819
29,3682
30,0417
30,6462
22,6511
23,1858
23,8299
24,4241
25,0476
25,7925
26,3445
26,8071
27,5273
28,1371
28,8021
29,7849
18,3176
18,8628
14,593501
14,89088
15,438595
16,665663
16,974185
17,799268
77,496944
76,573235
74,936264
73,99838
73,070195
71,4938
71,565624
72,397806
71,677918
71,870462
71,902497
70,362423
176,00496
172,3745
0,2432
0,2482
0,2573
0,2778
0,2829
0,2967
1,2916
1,2762
1,2489
1,2333
1,2178
1,1916
1,1928
1,2066
1,1946
1,1978
1,1984
1,1727
2,9334
2,8729
113946
113950
113954
113958
114002
114006
114010
114014
114018
114022
114026
114030
114034
114038
114042
114046
114050
114054
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
$JC007
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
271107
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
25
26
26
26
26
26
26
26
26
26
26
26
26
26
26
26
26
26
26
96
96
96
96
97
97
97
97
97
97
97
97
97
97
96
96
96
96
97
97
94
96
11
63
70
67
68
73
64
57
30
5
89
76
66
59
49
49
49
49
49
49
49
49
49
49
49
49
49
49
49
49
49
49
15
15
15
15
15
15
15
15
15
15
15
15
15
15
15
15
15
15
16
16
16
16
16
15
15
14
13
12
11
10
9
8
7
6
5
4
16 00.0
16 00.0
8 00.0
8 00.1
14 07.7
96 09.6
26 11.5
23 17.1
5 18.4
12 17.3
1 15.9
28 08.4
53 14.3
55 18.6
38 15.2
41 14.1
67 11.3
94 13.9
0,4444
distancia
entre
estações
0,4444
0,4444
0,4444
0,4444
0,4444
0,4444
0,4444
0,4444
0,4444
0,4444
0,4444
0,4444
0,4444
0,4444
0,4444
0,4444
0,4444
0,8597
0,8597
0,8597
0,8597
0,8597
0,8597
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0,8596
0
6,3E-07
1,6E-07
2,1E-06
4,5E-06
5,1E-06
4,6E-06
5,7E-06
3,9E-06
5,2E-06
2,5E-06
3,4E-06
4,7E-06
5,9E-06
4,3E-06
2,6E-06
2,5E-06
5,7E-06
4
164
4
168
4
172
4
176
4
180
4
184
4
188
4
192
4
196
4
200
4
204
4
208
4
212
4
216
4
220
4
224
4
228
4
232
36,3202
4468,0464
15,7568
4483,8033
16,6212
4500,4245
27,3270
4527,7514
37,8637
4565,6151
29,8739
4595,4889
21,3979
4616,8868
15,7565
4632,6434
33,3256
4665,9689
24,7694
4690,7384
36,2592
4726,9976
29,3241
4756,3217
32,7361
4789,0578
28,6571
4817,7149
13,1693
4830,8842
1,0313
4831,9155
4,0257
4835,9412
0,0000
4835,9412
20,8446
21,2103
21,5711
21,9586
22,3042
22,5899
22,8669
23,1716
23,4537
23,8060
24,1284
24,5579
24,9755
25,3645
25,7259
26,1653
26,6893
27,2442
0
0
0,1866255
0,2302982
0,8171666
2,0754157
3,4818649
4,7016098
6,1910446
7,1399029
8,4256831
8,9199121
9,6275322
10,657645
11,979766
12,822986
13,193973
13,503608
0,0000
0,0000
0,0031
0,0038
0,0136
0,0346
0,0580
0,0784
0,1032
0,1190
0,1404
0,1487
0,1605
0,1776
0,1997
0,2137
0,2199
0,2251
Conforme podemos observar na tabela acima, os primeiros valores do tempo
estimado obtido é um valor muito alto devido à velocidade média ser próxima a zero. Para
contornar esse erro de estimativa, até que a velocidade média adquira um valor constante,
foram ignorados os quatorzes primeiros pontos da velocidade média. Com esse contorno,
obtivemos um valor próximo do obtido no trajeto.
Podemos validar o resultado do cálculo obtido através dos dados transmitidos
pelo ônibus, no caso, o horário do GPS do início do trajeto até seu término.
Portanto, pelo cálculo obtemos 3 minutos e 48 segundos, e pelos dados do
horário do GPS, tem-se 2 minutos e 48 segundos. Embora seja uma diferença de 1 minuto,
pode-se levar em conta que o algoritmo do cálculo estimado funciona perfeitamente
validando assim o projeto de fim de curso.
39
ARMAZENANDO DADOS NO SERVIDOR:
Para preencher o servidor com as rotas dos ônibus, um software foi desenvolvido na
interface LabView, Figura 20, da National Instruments.
Figura 19 - Software para inserir a rota.
O software é de fácil uso. Basta inserir o Código do Ônibus e conectar o GPS a ele.
Com isso basta fazer a rota que será inclusa no sistema. Esse programa gera um arquivo
padrão TXT de acordo com o protocolo de mensagens desenvolvido e faz aquisição de
pontos a cada quatro segundos.
A Figura 21 mostra o traçado da rota configurada:
40
Figura 20 - Rota configurada para testes.
Com esses pontos em mãos, configura-se a rota no servidor e carrega as
informações adquiridas e, assim, estará cadastrando uma nova rota no servidor. Maneira
desenvolvida para facilitar as operações de acréscimo de pontos, evitando operação manual
ponto a ponto.
41
CONCLUSÃO:
O problema de congestionamento nas cidades é grande, campanhas de incentivo ao
uso do transporte coletivo não motivam a população que possui automóvel devido a atrasos
e horários incertos.
Por esse motivo o projeto vem para auxiliar no incentivo ao uso do transporte
público, mostrando tempo estimado para a chegada do próximo ônibus. A solução proposta
além do objetivo principal traz consigo uma gama de possibilidades que geram benefícios
tanto aos usuários, proprietários da frota e agência regulamentadora (como exemplo a
URBS de Curitiba Paraná).
Para cumprir esse objetivo, são utilizados módulos GPS, GPRS e microcontroladores. A função do GPS é informar a hora exata em todo o sistema, posição do
ônibus e velocidade do mesmo. O módulo GPRS faz a comunicação do sistema,
interligando os ônibus à central e estações tubos ou terminais.
A junção GPS/GPRS/Microcontrolador possibilita muitos outros projetos. Neste
projeto é uma solução relativamente barata e seu funcionamento não depende de custos de
implementação de redes ou sensores pela cidade, facilitando o uso e operabilidade. A
viabilidade financeira do projeto é real e com os custos na comunicação via rede de celular
cada vez mais baixa, o sistema apresenta uma relação custo/benefício muito alta.
42
REFERÊNCIAS BIBLIOGRÁFICAS:
[1]
Fernandes,
Carlo
Alberto
Gonzáles
-
Tecnologia
GPRS;
Monografia
(Especialização em Telecomunicações) - Pontifícia Universidade Católica do Paraná, 2003.
[2] Souza, David José de - Desbravando o PIC; São Paulo: Érica, 2000.
[3] Instituto Curitiba de Informática e Secretaria Municipal da Comunicação Social –
Prefeitura
Municipal
de
Curitiba
-
Consultado
na
Internet
em
18/04/207
http://www.curitiba.pr.gov.br/pmc/a_cidade/Solucoes/Transporte/index.html.
[4] GASPAR, J. J. (N/D) - Global Positioning System - G.P.S. - Dep. Florestal,
Escola Superior Agrária de Coimbra.
[5] Axmark, David e Widenius, Michael – Manual de Referencia do MySQL 4.1 Equipe de Documentação da MySQL - http://www.mysql.com/documentation/
[6] Almeida, Rondinely S. de – MySQL Básico - Consultado na Internet em
12/08/2007 - http://www.hospedia.com.br/artigos/5/MySQL.html
[7] BCD, Dicas – O portal dos Programadores C++ Builder - Consultado na
Internet em 27/10/2007 - http://www.dicasbcb.com.br
[8] System Designer Reference Manual, Lassen (TM) LP GPS – Trimble Navigation
Limited.
[9] Pereira, Fábio. Microcontroladores PIC - Programação em C; Editora Érica,
2003, 6ª Edição.
43