ÁLGEBRA LINEAR1
1 – EQUAÇÕES LINEARES
Uma equação linear segue a seguinte forma: a11 x1 + a12 x2 + a13 x3 + ... + a1n xn = b1
Considerando-se que:
x1, x2, ..., xn são as incógnitas;
a11, a12, ...,a1n são os coeficientes (números reais ou complexos);
b1 é o termo independente (número real ou complexo).
Exemplo de equação linear
Exemplos de equações não-lineares
3x1 + 4x2 + 10x3 = 20
12x + 4y + x = -4
23x2 + 4y2 = 19
6x + 3y - 3zw = 0
3x - 2y + 6z = 7
-2x + 4z = 3t - y + 4
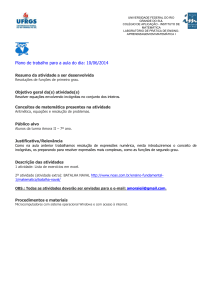
Antes de se tratar os sistemas de equações lineares é importante ver-se como uma reta pode ser
observada em um plano cartesiano. A figura a seguir expõe resumidamente um plano cartesiano.
+∞
Eixo das
Ordenadas
-∞
Par ordenado P
2º 1º
Quadrante Quadrante
3º
4º
Quadrante
Quadrante
+∞
Eixo das
Abscissas
-∞
Origem: par ordenado (0,0)
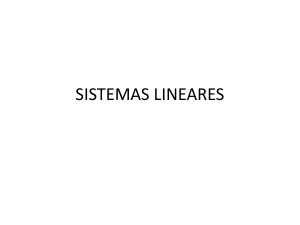
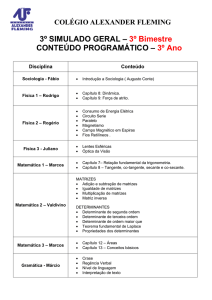
Veja uma reta expressa pela sua equação reduzida y = k x + w, sendo k o seu coeficiente angular e
w o coeficiente linear. Tomando-se dois pares ordenados, P1=(x1,y1) e P2=(x2,y2), sendo que x1≠x2,
que estão sobre a reta, pode-se calcular o seu coeficiente angular por k = ∆y ÷ ∆x, ou seja,
k = (y2-y1) ÷ (x2-x1)
y
y2
P2=(x2,y2)
Coeficiente
Linear
y1
P1=(x1,y1)
(0,0)
x1
x2
x
1
Baseado em Haetinger, Claus e Dullius, Madalena, Álgebra Linear e Geometria Analítica, UNIVATES - Centro Universitário - Centro III, Lajeado
– Rio Grande do Sul, 2006. Complementos capturados de http://www.expoente.com.br/professores/kalinke/estudo/sistemas_lineares.htm,
http://pessoal.sercomtel.com.br/matematica/medio/matrizes/sistemas.htm,
http://pessoal.sercomtel.com.br/matematica/medio/matrizes/determinantes.htm e http://pessoal.sercomtel.com.br/matematica/fundam/eq1g/eq1g.htm
1
2– SISTEMAS DE EQUAÇÕES LINEARES
Um sistema de equações lineares com m equações e n incógnitas é um conjunto de equações do
tipo:
Uma solução do sistema anterior é uma n-upla de números (x1; x2;...;xn) que satisfaz
simultaneamente as m equações.
Pode-se reescrever este sistema A . x = b por um conjunto de matrizes conforme a seguir:
Matriz A, dos coeficientes das incógnitas:
Matriz X (vetor), das incógnitas:
X
Matriz B (vetor), dos termos independentes:
B
2.1- Solução de um Sistema Linear
Dado um sistema de uma equação e uma incógnita ax = b, existirão três possibilidades:
a ≠ 0. Neste caso a equação tem uma única solução x = b/a;
a = 0 e b = 0. Então se tem 0x = 0 e qualquer número real será solução da equação.
a = 0 e b ≠ 0. Tem-se 0x = b. Não existe solução para esta equação.
2
Considerando-se um sistema de m equações lineares com n incógnitas x1;...; xn:
cujos coeficientes aij e termos independentes bi são números reais ou complexos. Este sistema
poderá ter:
a) uma única solução: o sistema é possível (compatível) e determinado (SPD).
b) infinitas soluções: sistema é possível e indeterminado (SPI).
c) nenhuma solução: o sistema é impossível (incompatível) (SI).
Exemplos:
y
-1
SPD: Duas retas com ponto de interseção (x,y).
x + 2y = -1
2x – y = 8
2x - y = 8
3
x
- 0,5
4
Solução: (3, -2).
-2
x + 2y = -1
SPI: Duas retas paralelas e sobrepostas.
4x + 2y = 100
8x + 4y = 200
-8
Solução: Existem infinitos pontos que satisfazem a ambas (pertencem as duas retas).
SI: Duas retas paralelas.
x + 3y = 4
x + 3y = 5
2.2 - Sistema Linear Homogêneo (SLH)
Considera-se um SLH quando os termos independentes de todas as equações são nulos. Todo
sistema linear homogêneo admite pelo menos a solução, que é a solução identicamente nula. Assim,
todo sistema linear homogêneo é possível. Este tipo de sistema poderá ser determinado se admitir
somente a solução trivial ou indeterminado se admitir outras soluções além da trivial.
Exemplo:
2x - y + 3z = 0
4x + 2y - z = 0
x - y + 2z = 0
3
3 – MATRIZES
Sejam 1 ≤ m, n ∈ ℵ; chama-se matriz m x n (leia-se m por n) a uma tabela constituída por mn
elementos, dispostos em m linhas (horizontais) e n colunas (verticais).
Seja Amxn e sejam i, j ∈ ℵ tais que: 1 ≤ i ≤ m e 1 ≤ j ≤ n; indica-se aij o elemento de A que ocupa a
linha i e a coluna j; A será indicada por:
ou de forma mais sintética: A = (aij), com 1 ≤ i ≤ m e 1 ≤ j ≤ n. Usa-se sempre letras maiúsculas para
denotar matrizes.
3.1– Tipos Especiais
Matriz Quadrada: é aquela cujo número de linhas é igual ao número de colunas (m = n). Nestes
casos, costuma-se dizer que a matriz é de ordem n.
Matriz Nula: é aquela em que aij = 0, para todo i e j. É denotada por Omxn.
Matriz-Coluna (vetor): é aquela que possui uma única coluna (n = 1).
Matriz-Linha: é aquela onde m = 1.
Seja Anxn uma matriz quadrada de ordem n; os elementos aij , para os quais i = j (a11; a22;...; ann), são
ditos elementos da diagonal principal da matriz. Por outro lado, os elementos para os quais i + j =
n + 1 (a1n; a2 n-1;...; an 1), formam a diagonal secundária da matriz.
a11
a21
a31
Diagonal Secundária
a12
a22
a32
a13
a23
a33
Diagonal Principal
Matriz Diagonal: é uma matriz quadrada (m = n) onde aij = 0, para i ≠ j, isto é, os elementos que não
estão na diagonal principal são nulos.
Exemplo:
Matriz Identidade ou Unidade: é uma matriz quadrada de ordem n em que aii = 1 e aij = 0, para i ≠ j.
4
Matriz Triangular Superior: é uma matriz quadrada onde todos os elementos abaixo da diagonal são
nulos, isto é, m = n e aij = 0, para i > j.
Ex.
Matriz Triangular Inferior: é aquela em que m = n e aij = 0, para i < j.
Ex.
Matriz Simétrica: é aquela onde m = n e aij = aji. Observe que isto equivale a dizer que a parte
superior é uma reflexão axial da parte inferior, em relação à diagonal.
Ex.
3.2– Operações
3.2.1– Adição
A soma de duas matrizes m x n é a matriz que se obtém das matrizes dadas, somando-se os
elementos de mesma posição. Para dizer que C é soma de A com B, indica-se com A + B.
Obs.: Só definimos soma de matrizes quando elas têm entre si o mesmo número de linhas e também
o mesmo número de colunas.
Matriz Oposta: de A é a matriz que se obtém de A trocando-se o sinal de cada um dos seus
elementos. Para dizer que B é oposta de A, indica-se com -A.
Propriedades
Comutativa: Dadas as matrizes A, B e C, todas m x n, tem-se: A + B = B + A
Associativa: (A + B) + C = A + (B + C)
Elemento Neutro: A + Omxn = Omxn + A = A
Elemento Oposto: A + (-A) = (-A) + A = Omxn
5
3.2.2– Subtração
Sejam A e B duas matrizes m x n; chama-se Diferença entre A e B à soma de A com a oposta de B;
a diferença entre A e B será indicada por A - B. Então, pela definição dada, tem-se
A - B = A + (-B).
3.2.3– Multiplicação
Produto do número real α por uma matriz: o produto do número real α pela matriz A é a matriz que
se obtém de A multiplicando cada um dos seus elementos por α.
Propriedades
Sejam os números reais α e β e as matrizes A e B, ambas m x n. Considerar:
•
•
•
•
•
•
•
α (β A) = (α β) A
(α + β) A = α A + β A
α (A + B) = α A + α B
1.A=A
(-1) A = -A
0 . A = Omxn
α . Omxn = Omxn
Produto entre duas matrizes: O produto entre a matriz A e a matriz B à matriz C = (cij), 1 ≤ i ≤ m e
1 ≤ j ≤ n tal que:
Cij = ai1b1 j + ai 2b2 j + ... + aip b pj
Só tem sentido definir-se o produto AB de duas matrizes quando o nº de colunas de A for igual ao
nº de linhas de B; além disso, o produto AB possui o nº de linhas de A e o nº de colunas de B.
Esquematicamente tem-se:
Amp .B pn = Cmn
Ex.
Propriedades
Associativa: (AB)C = A(BC)
Distributiva à Esquerda: C(A + B) = CA + CB
Distributiva à Direita: (A + B)C = AC + BC
Elemento Neutro: AIn = ImA = A
(α A)B = A(α B) = α (AB)
A . Onxp = Omxp e Opxm . A = Opxn
6
Potência: Seja A uma matriz quadrada de ordem qualquer. Defini-se a n-ésima Potência de A do
seguinte modo:
A1 = A
An = A . An-1, onde n é um inteiro ≥ 2.
3.3– Determinantes
Entende-se por determinante o número ou uma função, associado a uma matriz quadrada, calculado
de acordo com regras específicas.
3.3.1- Determinante de uma matriz de ordem 1
O determinante de uma matriz A, de ordem 1, é o próprio número que origina a matriz.
Por exemplo: A = ( 3 ), então det(A) = 3
3.3.2- Determinante de uma matriz Quadrada
Se A é uma matriz quadrada A de ordem 2, dada por:
a11
Ac = a21
DS
a12
a22
DP
Define-se o determinante de A - det(A), por det(A) = a11 a22 - a21 a12
Se A é uma matriz quadrada A de ordem 3, dada por:
a11
Ac = a21
a31
Diagonal
Principal
a12
a22
a32
a13
a23
Diagonal
Secundária
a33
-
+
Define-se o determinante de A, como:
det(A) = a11a22a33 + a21a32a13 + a31a12a23 - a11a32a23 - a21a12a33 - a31a22a13
3.3.3 – Método de Sarrus (Somente para matriz quadra de ordem 3)
Sarrus (pronuncia-se Sarrí), cujo nome completo é Pierre Frederic SARRUS (1798 - 1861), foi
professor na universidade francesa de Strasbourg. A regra de SARRUS, foi provavelmente escrita
no ano de 1833.
Dada a matriz A de ordem 3:
a11
Ac = a21
a31
a12
a22
a32
a13
a23
a33
7
Repetem-se as duas primeiras colunas após a terceira coluna, de forma a montar uma matriz com 3
linhas mas com 5 colunas.
a11
a12
a13
a11
a12
a22
a23
a21
a22
Ac = a21
a31
a32
a33
a31
a32
Marcam-se as diagonais para direita (vermelho, verde e azul), fazendo-se o produto de cada
elemento. Somam-se esses produtos.
Ac =
a11
a21
a31
a12
a22
a32
a13
a23
a33
a11
a21
a31
a12
a22
a32
Marcam-se as diagonais para esquerda (lilás, laranja e marrom), fazendo-se o produto de cada
elemento. Subtraem-se esses produtos dos produtos somados no passo anterior.
det(A) = a11a22a33 + a12a23a31 + a13a21a32 - a13a22a31- a11a23a32 – a12a21a33
3.3.4 – Para matriz com ordem igual ou superior a quatro
Para calcular-se o determinante de matrizes com ordem igual ou superior a quatro, pode-se reduzir a
sua ordem, utilizando-se o seguinte procedimento:
Dada a matriz quadrada a seguir,
A=
a11
a21
a31
.
.
.
am1
a12
a22
a32
.
.
.
am2
...
...
...
...
a1n
a2n
a3n
.
.
.
amn
O cálculo do determinante de A é baseado nos números complementares dos elementos a11, a12, ...,
a1n da matriz A. Para se calcular estes números complementares, deve-se eliminar a linha e a coluna
a que o número em questão pertence. Deste modo, para calcular o complementar de a11, deve-se
eliminar a 1ª linha e a 1ª coluna da matriz A. Já para encontrar o complementar de a13, deve-se
eliminar a 1ª linha e a 3ª coluna da matriz A.
Por exemplo:
Dada a matriz A a seguir,
Calcula-se o det(A) da seguinte forma:
8
1.0 - 0.12 -3.(-12) - 2.(-8) = 0 - 0 + 36 + 16 = 52
Algumas Propriedades (IMPORTANTE!)
1) Somente as matrizes quadradas possuem determinantes.
2) O determinante de uma matriz que tem todos os elementos de uma linha ou coluna iguais a
zero, é nulo.
3) O determinante de uma matriz que tem duas linhas ou colunas paralelas iguais ou
proporcionais, é nulo.
4) Multiplicando-se (ou dividindo-se) os elementos de uma linha ou coluna por um número, o
determinante fica multiplicado (ou dividido) por esse número.
5) Se todos os elementos situados de um mesmo lado da diagonal principal de uma matriz
quadrada de ordem n, forem nulos (matriz triangular), o determinante é igual ao produto dos
elementos da diagonal principal.
Exemplos:
1) Qual o determinante associado à matriz?
(Item 3) Observa-se que a 4ª linha da matriz é proporcional à 1ª linha (cada elemento da 4ª linha é
obtido multiplicando os elementos da 1ª linha por 3). Sendo assim, o determinante da matriz dada é
NULO.
2) Calcular o determinante:
(Item 2) Observa-se que a 2ª coluna é composta por zeros. Logo, o determinante é NULO.
9
3) Calcule o determinante:
(Item 5) Pela propriedade que caracteriza a matriz triangular tem-se D = 2 x 5 x 9 = 90
4 – RESOLUÇÃO DE SISTEMA DE EQUAÇÕES LINEARES
Existem vários métodos equivalentes para resolução de sistemas de equações lineares:
4.1-Método da Substituição
O método da substituição consiste em isolar uma incógnita em qualquer uma das equações,
obtendo-se a igualdade com um polinômio. Então deve-se substituir essa mesma incógnita em outra
das equações pelo polinômio ao qual ela foi igualada.
Sistemas com duas equações
Um sistema com duas equações lineares pode ser representado por:
y = ax + b
y = cx + d
Onde x e y são as incógnitas da equação.
Para encontrá-las, por substituição, substituem-se as variáveis em suas equações por seus
polinômios correspondentes, ou seja:
cx + d = ax + b > cx – ax = b – d > x (c – a) = b – d > x = (b – d) / (c – a)
y = c [(b – d) / (c – a)] + d > y = [(cb – cd) / (c – a)] + d > y = [(cb – cd) + (dc – da)] / (c – a) >
y = (cb – da) / (c – a)
4.2-Método da Soma
É uma forma simplificada do método da substituição. Só é possível quando as equações são
dispostas de forma que, ao subtrair ou somar os polinômios das equações, todas as incógnitas,
exceto uma, se anulam.
As mesmas equações lineares são utilizadas neste método:
y = ax + b
y = cx + d
y – y = ax – cx + b – d > cx – ax = b – d > x = (b – d) / (c – a)
Para se determinar Y deve-se substituir X em uma das equações do sistema.
Y = a [(b – d) / (c – a)] + b > Y = [(ab – ad) / (c – a)] + b > Y = [(ab – ad) + (bc – ba)] / (c – a) >
10
Y = (– ad + bc) / (c – a)
4.3 - Regra de Cramer
Gabriel Cramer (nascido em Genebra, 31 de Julho de 1704, falecido em Bagnols, França, 4 de
Janeiro de 1752) foi um matemático suíço, professor de Matemática e de Filosofia da Universidade
de Genebra e membro da Academia de Berlim e da London Royal Society. Dedicou-se especial
atenção à teoria das curvas.
Seguindo-se um exemplo numérico de um sistema de equações lineares,
x + 3y - 2z = 3
2x - y + z = 12
4x + 3y - 5z = 6
pela regra de Cramer, determinam-se os seguintes determinantes:
1) Matriz dos coeficientes (A): Formada pelos coeficientes das incógnitas do sistema (anm), onde n
é a linha em que o elemento pertence e m a coluna.
1 3 − 2
A = 2 − 1 1 = 24
4 3 − 5
2) Matriz da incógnita x (Ax): É a matriz obtida ao substituir-se a coluna da incógnita x pelos
termos independentes.
3 3 − 2
Ax = 12 − 1 1 = 120
6 3 − 5
3) Matriz da incógnita y (Ay): É a matriz obtida ao substituir-se a coluna da incógnita y pelos
termos independentes.
1 3 − 2
Ay = 2 12 1 = 48
4 6 − 5
4) Matriz da incógnita z (Az): É a matriz obtida ao substituir-se a coluna da incógnita z pelos
termos independentes.
1 3 3
Az = 2 − 1 12 = 96
4 3 6
Considerando-se que o determinante - det(A) é diferente de zero, é possível obter os valores de x, y,
e z pela seguinte expressão:
J=
det( A j )
det( A)
11
Exemplo:
Dado o seguinte sistema de equações lineares:
2x + y - z = 4
x - y + 3z = -1
3x - 5y + 7z = -7
Dada a matriz principal (Mp) que é formada pelos coeficientes das incógnitas das equações lineares:
Calcula-se o seu determinante: det (Mp) = 20.
Os determinantes das incógnitas são calculados baseando-se na matriz Mp quando substituída a
coluna de uma das incógnitas pela coluna dos termos independentes, formando-se as matrizes Mx,
My e Mz, das quais também se devem calcular os determinantes:
det (Mx) = 20; det (My) = 40 e det (Mz) = 0
Com isso, pode-se chegar aos valores de das incógnitas x, y, z:
5 –SISTEMA DE INEQUAÇÕES LINEARES
5.1- Inequações
Uma inequação é uma condição onde os dois membros são comparados por um sinal de
desigualdade. Esses sinais são:
<
menor
>
maior
<
menor ou igual
>
maior ou igual
Salientam-se os seguintes princípios de equivalência:
12
Multiplicando-se os membros de uma inequação por um número positivo, obtém-se uma
inequação equivalente.
Multiplicando-se os membros de uma inequação por um número negativo, obtém-se uma
inequação equivalente desde que se lhe mude o sentido.
Somando-se ou subtraindo-se um número em ambos os membros, obtém-se uma
inequação equivalente.
Exemplos:
A) Resolva a inequação a seguir:
Passo 1 2x + 2 < 14
Passo 2 2x < 14 - 2
Passo 3
2x < 12
Passo 4
x<6
O conjunto solução é formado por todos os números inteiros positivos menores do que 6, ou seja,
S = {1, 2, 3, 4, 5}.
B) Para determinar todos os números inteiros positivos considerando-se as duas desigualdades
segundo a expressão: 12 < 2x + 2 < 20, faz-se:
Passo 1
12 <
2x + 2
< 20
Equação original
Passo 2 12 - 2 < 2x + 2 - 2 < 20 - 2 Subtraímos 2 de todos os membros
Passo 3
10 <
2x
< 18
Dividimos por 2 todos os membros
Passo 4
5<
x
<9
Solução
O conjunto solução é S = {6, 7, 8}
No caso onde existam duas variáveis pode-se resolver a equação pelo artifício gráfico.
Exemplos:
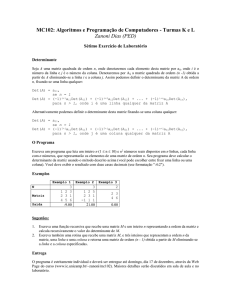
A) 2x + 3y ≥ 0.
Inicialmente faz-se 2x + 3y = 0 para traçar-se a reta (em vermelho). Para se obter a área (em
amarelo) que representa a inequação verifica-se, por exemplo, se um ponto qualquer, neste caso
(1,1), pertence a área.
2.1 + 3.1 ≥ 0 ... 5 ≥ 0
É verdadeiro, então o ponto 1,1
está contido na área da inequação.
13
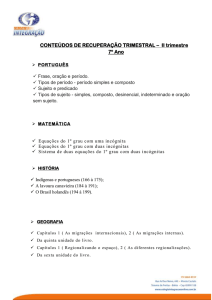
B) Para um sistema de inequações dado por:
2x + 3y > 6
5x + 2y ≤ 20
Chega-se a seguinte solução gráfica:
Sistema
2x + 3y > 6
2x + 3y = 6
5x + 2y = 20
5x + 2y ≤ 20
14