Alocação Ótima de Reguladores de Tensão em
Sistemas de Distribuição de Energia Elétrica
Usando uma Formulação Linear Inteira Mista
1
Raiane P. Alves, John F. Franco e Marcos J. Rider
Resumo – Este artigo apresenta o desenvolvimento de uma
formulação linear inteira mista para resolver o problema de
alocação de reguladores de tensão ao longo dos alimentadores
primários de sistemas de distribuição de energia elétrica radiais,
com o objetivo de melhorar do perfil de tensão e minimizar os
custos de instalação dos equipamentos. Na formulação proposta,
o cálculo do ponto de operação em regime permanente de um
sistema de distribuição radial é modelado matematicamente
usando expressões lineares. O uso de um modelo de programação
linear inteira mista garante a convergência para a solução ótima
usando ferramentas de otimização clássica existentes. Dois
sistemas testes são utilizados para mostrar a precisão do modelo
matemático, assim como também a eficiência da técnica de
solução proposta.
Palavras-chave: Alocação ótima de reguladores de tensão,
planejamento do sistema de distribuição, programação linear
inteira mista, sistema de distribuição de energia elétrica.
NOTAÇÃO
A notação utilizada ao longo deste artigo é reproduzida a
seguir para referência rápida.
Conjuntos:
Conjunto de circuitos.
Conjunto de barras.
Conjunto de níveis de demanda.
Variáveis:
Magnitude de tensão no nó no nível de demanda .
Quadrado de
no nível de demanda .
Magnitude da corrente no circuito
no nível de
demanda .
Quadrado de
no nível de demanda .
Fluxo de potência ativa no circuito
no nível de
demanda .
Fluxo de potência reativa no circuito
no nível de
demanda .
Fluxo de potência ativa fornecido pela subestação no
circuito no nível de demanda .
Fluxo de potência reativa fornecido pela subestação no
circuito no nível de demanda
Variável de correção de potência usada na discretização
de
.
Este trabalho foi financiado pelas instituições brasileiras FAPESP, CAPES
e CNPq.
R. P. Alves, J. F. Franco e M. J. Rider estão com a Faculdade de
Engenharia de Ilha Solteira – Universidade Estadual Paulista, Departamento
de Engenharia Elétrica, Ilha Solteira, São Paulo, Brasil (e-mails: {rpalves,
johnfranco, mjrider}@dee.feis.unesp.br).
Variável binária usada na discretização de
.
Variável binária de investimento para alocação
regulador de tensão no circuito .
Número de passos inteiros do tap do regulador
tensão no circuito no nível de demanda
Tap do regulador de tensão no ramo
no nível
demanda
Quadrado de
.
Magnitude de tensão não regulada no nó no nível
demanda
Quadrado de
Correções da magnitude de tensão usadas
discretização de
Valor do r-esimo bloco de
.
Valor do r-esimo bloco de
.
de
de
de
de
na
Constantes:
Impedância do circuito .
Resistência do circuito .
Reatância do circuito .
Demanda de potência ativa no nó
no nível de
demanda .
Demanda de potência reativa no nó
no nível de
demanda .
Magnitude da tensão mínima.
Magnitude da tensão máxima.
Limite máximo da magnitude de corrente no circuito
.
Número de blocos da linearização por partes.
Número de discretizações da variável
.
Passo de discretização de da magnitude da tensão ao
quadrado.
Inclinação do r-esimo bloco do fluxo de potência ativa
e reativa no circuito .
Limite superior de cada bloco de discretização do fluxo
de potencia ativa e reativa no circuito
Taxa de recuperação do capital do regulador de tensão.
Custo de instalação, ou fixo, anualizado do regulador
de tensão.
Taxa de interesse do custo das perdas.
Taxa de regulação do regulador de tensão.
Número máximo de passos do tap.
Número máximo de reguladores de tensão que podem
ser instalados na rede.
2
I. INTRODUÇÃO
O
problema de planejamento de expansão dos sistemas
de distribuição de energia elétrica (PESD) é de grande
importância para as empresas distribuidoras pois é
necessário atender os consumidores com qualidade de
fornecimento de energia, altos índices de confiabilidade e
custos competitivos considerando o crescimento da demanda
de energia elétrica. Altos custos de investimentos e de
operação ressaltam a importância do PESD [1].
O planejamento é um processo de tomada de decisões e seu
objetivo principal é determinar o conjunto de investimentos
que garantem uma operação econômica e confiável da rede.
No PESD um dos problemas a ser resolvidos é o problema da
queda de tensão nas redes de distribuição, principalmente em
redes de distribuições rurais [1]. Um perfil de tensão adequado
traz benefícios tanto para as distribuidoras quanto para os
consumidores, pois com isso as perdas do sistema de
distribuição diminuem e os equipamentos operam
corretamente, alem disso, as penalidades que a concessionária
é submetida caso não satisfaça os limites estabelecidos pelo
órgão regulador podem ser evitadas [2].
Uma vez detectado que existem problemas de tensão na
rede primária, a instalação de reguladores de tensão (RT) é
uma das medidas mais adequadas, pois eles permitem o
controle da magnitude de tensão numa faixa regulada. A
instalação dos RT’s com objetivo de melhorar o perfil de
tensão de um sistema de distribuição é uma prática muito
comum. As vantagens fornecidas pela inserção destes
dispositivos reguladores dependem da sua localização,
capacidade e ajuste. O RT funciona automaticamente,
elevando ou baixando a magnitude de tensão na barra de
carga, respeitando sua faixa de regulação [2].
Existem poucos trabalhos na área de alocação de regulador
de tensão em sistemas de distribuição de energia elétrica. Em
[3] é apresentado uma metodologia heurística para resolver o
problema de alocação ótima dos RT’s para sistemas de
distribuição radiais com o objetivo de minimizar o custo de
investimento e manutenção dos RT’s, além do custo das
perdas no sistema. Em [4] é apresentado um método de
controle e localização ótima de RT’s e compensadores
estáticos para sistemas de distribuição com presença de
geração distribuída. Um algoritmo de busca tabu é utilizado
para alocar RT’s e compensadores estáticos minimizando os
custos de investimento, mantendo as tensões do sistema dentro
dos seus limites após a introdução de geração distribuída no
sistema. Um algoritmo genético (AG) especializado é
apresentado em [5] para definir a localização ótima de RT’s
no sistema de distribuição de energia elétrica. O processo de
otimização minimiza simultaneamente as perdas totais de
energia e os desvios de tensão no sistema.
Em [6] foi desenvolvido um análise de diversas alternativas
de alocação e ajustes ótimos de RT’s em sistemas de
distribuição, através de um método de enumeração, com o
objetivo de melhorar a qualidade de energia entregue ao
consumidor e reduzir os custos da distribuição e
principalmente manter os níveis de tensão dentro dos limites
estabelecidos pela agência reguladora.
Um AG juntamente com o fluxo de potência ótimo foi
usado em [7] para a alocação ótima de RT’s em redes de
distribuição, com o objetivo de determinar os melhores locais
para a instalação dos RT’s ao longo dos alimentadores, suas
dimensões e seus ajustes. Um método heurístico é apresentado
em [8] para o dimensionamento e alocação de RT’s em
sistemas radiais de distribuição de energia elétrica, com o
objetivo de melhorar o perfil de tensão, minimizar as perdas
de potência ativa e os custos de investimento.
Em [9] é realizada a combinação de dois AG para resolver o
problema de planejamento integrado de bancos de capacitores
e RT’s. Um dos AG é utilizado para alocar bancos de
capacitores, cujo objetivo é maximizar a economia líquida
proveniente da redução das perdas após a inserção destes
bancos; o outro AG é utilizado para alocar RT’s e tem como
objetivo minimizar os custos decorrentes da operação para
corrigir o perfil de tensão do alimentador. Em [10] é
apresentado o problema de alocação de banco de capacitores e
RT’s em redes primárias de distribuição de energia elétrica,
com intuito de melhorar o perfil de tensão e diminuir perdas
elétricas, sendo resolvido utilizando um AG.
Neste artigo é apresentada uma formulação não linear
inteira mista do problema de alocação de RT’s em sistemas de
distribuição de energia elétrica radiais com objetivo de
melhorar o perfil de tensão e minimizar os custos de instalação
dos RT’s. Linearizações foram feitas para encontrar uma
formulação linear inteira mista equivalente do problema de
alocação de RT’s e esta foi solucionada usando ferramentas de
otimização clássica existentes. O modelo proposto foi testado
usando dois sistemas de distribuição de 70 e 202 nós.
II. O PROBLEMA DE ALOCAÇÃO DE RT’S EM SISTEMAS DE
DISTRIBUIÇÃO DE ENERGIA ELÉTRICA RADIAIS
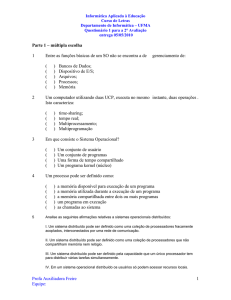
A. Hipóteses
A fim de representar o funcionamento em regime
permanente de um sistema de distribuição de energia, são
feitas as seguintes hipóteses:
1- As demandas das cargas no sistema de distribuição são
representadas como potência ativa e reativa constante;
2- No circuito o nó está mais próximo da subestação que
o nó ;
3- As perdas de potência ativa e reativa no circuito estão
concentradas no nó .
4- O sistema é balanceado e representado pelo seu
equivalente monofásico.
As hipóteses 1 e 4 são normalmente consideradas na
maioria dos problemas de PESD. As quatro hipóteses são
mostradas na Fig. 1, em que
e
são as perdas de
potencia ativa e reativa no circuito ij no nível de demanda d.
B. Operação em regime permanente de um sistema de
distribuição radial
As equações que representam a operação em regime
permanente de um sistema de distribuição radial são
mostradas em (1)–(4). Estas equações são frequentemente
usadas nos métodos de fluxo de carga de varredura [11].
(1)
(2)
3
(13)
(14)
(15)
(18)
Fig. 1. Sistema de distribuição de três nós
(4)
e
. (1) e (2) são as equações de
balanço de potência convencional. Usando (3), é possível
obter a magnitude da tensão nó j em termos da magnitude do
nó i, o fluxo de potência ativa e reativa, a magnitude de
quadrado da
corrente e os parâmetros elétricos do circuito
magnitude de corrente é calculado usando (4).
C. O modelo do regulador de tensão
O RT é basicamente um autotransformador, com um
mecanismo de mudança automática da posição do tap. A
maioria dos RT’s contém uma chave que permite uma faixa de
(+ elevar e – reduzir a magnitude de tensão)
regulação ±
respeitando a magnitude de tensão de referência e o número
máximo de passos (
, que usualmente são 32 passos). As
equações (5)-(8) mostram o modelo matemático do RT,
considerando que o regulador de tensão é alocado no nó do
é a magnitude de tensão não
circuito . No modelo
é a magnitude de tensão regulada,
regulada, antes do RT e
tem
passos, e
varia na
depois do RT. Note que
faixa de regulação
em intervalos
discretos de valor
, permitindo uma faixa de regulação
de ±
. Adicionalmente, cada RT tem um custo anualizado
de instalação
.
(5)
(6)
inteiro
(19)
inteiro
(3)
(7)
(8)
D. Formulação não linear do problema de alocação de RT’s
O problema de alocação de RT pode ser modelado como
um problema de programação não linear inteiro misto como
mostrado em (9)-(21).
(9)
Sujeito a
(10)
(20)
(21)
e
linear as variáveis
(16)
(17)
. Note que na formulação não
,
e
são usadas para
,
representar
,
,
e
respectivamente. A função
objetivo (9) representa o custo total, em que a primeira parte
representa o custo de investimento (alocação de RT’s) e a
segunda parte representa o custo anual das perdas de energia.
As equações (10)-(13) representam o estado de operação em
regime permanente de um sistema de distribuição radial,
considerando a presença dos RT’s. Note que em (12) e (13), a
substitui a magnitude
magnitude da tensão não regulada
da tensão regulada
, pois
passa a ser considerada como
As equações (14)a magnitude de tensão final do circuito
(16) são uma extensão de (5)-(7), considerando a regulação do
quadrado da magnitude de tensão e a alocação de RT’s. Note
que, se um regulador de tensão é adicionado no circuito
, a equação (16) é igual à equação (7), caso contrário
(se não é adicionado um regulador na linha ,
,
teremos:
e
, mostrando que
a tensão regulada e a tensão não regulada é a mesma. A
equação (17) define os valores máximos e mínimos do
quadrado da magnitude de tensão em todos os nós do sistema,
enquanto que (18) representa o limite dos fluxos de corrente
no circuito . O número máximo de RT’s que podem ser
instalados no sistema é representado em (19). A equação (20)
representa a natureza inteira do número de taps do RT. A
equação (21) representa a natureza binária da variável de
investimento do problema de alocação de RT’s. Os RT’s são
alocados se seu valor correspondente é igual a um e não é
alocado se seu valor é igual a zero. Note que as equações (9)(12) e (16)-(21) são lineares, em quanto que (13)-(15) são não
lineares, apresentando termos quadráticos e produtos de duas
variáveis de decisão. Com o objetivo de poder utilizar
ferramentas de otimização de programação linear inteira mista
é desejável obter expressões lineares para estas restrições.
E. Linearização
O membro esquerdo de (13) é linearizado pela discretização
de
usando as variáveis binárias
Em que
se
é maior que
. Note que
indica o
(11)
intervalo de discretização no qual se encontra
. Esta
condição é modelada em (22). Em que o passo de
(12)
discretização
.
4
(22)
O produto
é calculado usando o
ponto médio do primeiro intervalo de discretização do
quadrado da magnitude de tensão multiplicado pelo quadrado
da magnitude do fluxo de corrente mais as correções de
) que dependem de ,
e
potência sucessivas (
como mostrado em (23) e (24).
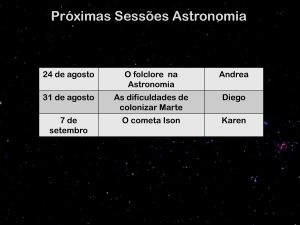
(23)
A
aproximação linear do produto de
define os valores de
. Se
(24)
equação (23) é a
e
. A equação (24)
então
e
; caso contrário
Fig. 2. Ilustração da modelagem linear por partes da função
mostrada em (22), é
Usando a discretização de
possível linearizar o membro direito de (14) como mostrado
em (27)-(28).
, em que
desempenha exatamente o papel do
fator “Big M” e proporciona um grau suficiente de liberdade
para
.
O membro direito de (13) é linearizado como descrito nas
equações (25)-(26).
(27)
e
(28)
. A equação (27) é
e
, em que o
(25)
uma aproximação linear do produto de
(26)
produto
é calculado usando o ponto médio do
primeiro intervalo de discretização do quadrado da magnitude
de tensão multiplicado pelo quadrado do tap do RT mais as
,
e
correções sucessivas da tensão que dependem de
. A equação (28) define os valores de
. Se
então
e
; caso contrário
e
.
e
. Note que as equações (25) e (26) são um conjunto
de expressões lineares do membro direito da equação (13);
e
são parâmetros constantes. As expressões
e
são as aproximações lineares
de
e
, respectivamente. A linearização de
é
mostrada na Fig. 2. As equações (26.a) e (26.b) afirmam que
e
são iguais a soma dos valores em cada bloco da
discretização, respectivamente. As equações (26.c) e (26.d)
definem os limites superiores e inferiores da contribuição de
cada bloco de
e
, respectivamente.
Podemos observar que o termo quadrático
do
membro direito da equação (15) varia no intervalo [0 , 1] e
pode ser aproximado por uma constante
. Assim (15)
pode ser linearizada como mostrado em (29). Esta linearização
tem o coeficiente de correlação de R2 = 0,9993 com um erro
máximo de 0,82% e um erro mínimo de 0,27%. O valor do
coeficiente de correlação mostra o alto nível de precisão desta
linearização.
(29)
F. Formulação linear inteira mista do problema de alocação
de RT’s
O problema de alocação de RT pode ser modelado como
um problema de programação linear inteiro misto como
mostrado em (30)-(33).
5
min (9)
(30)
Sujeito as restrições: (10)-(12), (16)-(22),(24),(26),(28) e (29)
(31)
(32)
(33)
em que
. As restrições (22), (24), (26) e
(31) substituem a restrição (13). As restrições (22), (28), (32) e
(33) substituem a restrição (14). As restrições (32) e (33)
permitem o cálculo da tensão regulada na presença de RTs. Se
, então
. Caso contrario,
é igual ao
lado direito de da restrição (27).
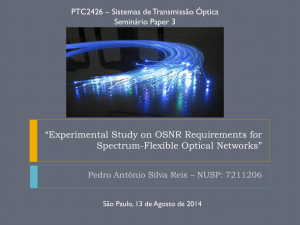
Fig. 3 - Perfil da magnitude de tensão do sistema de 70 nós sem RT’s.
III. TESTES E RESULTADOS
Os sistemas de 70 e 202 [8] nós foram utilizados para
avaliar a precisão do modelo matemático, assim como também
a eficiência da metodologia de solução. Para todos os testes foi
considerado um número de discretizações S = 4, um número
de blocos de linearização R = 20, um número máximo de
passos do tap dos RT’s de 32, uma taxa de regulação de 10%,
um custo de instalação de cada RT sendo US$ 20.000, um
custo de perdas de US$ 0,1/kWh, podendo ser alocados como
máximo três RT’s em cada sistema. O limite máximo e
mínimo da magnitude de tensão é igual a 1,00 pu e 0,93 pu da
tensão nominal, respectivamente. O modelo proposto foi
implementado na linguagem de modelagem AMPL [12] e
solucionado com o solver comercial CPLEX [13] chamado
com suas opções padrões.
A. Sistema de 70 nós
Para este sistema foram considerados três níveis de
demanda: leve, média e pesada, com uma duração de 1.000,
6.760 e 1.000 horas, respectivamente. As magnitudes de
tensão máxima e mínima são 12,66 kV e 11,77 kV,
respectivamente. A Fig. 3 ilustra a magnitude de tensão inicial
do sistema de 70 nós antes da alocação de RT’s e podemos
observar que existem nós na demanda pesada em que a
magnitude de tensão viola o limite mínimo de tensão. O nó 36
apresenta a menor magnitude de tensão do sistema na
demanda pesada que é de 11,451 kV. O custo inicial das
perdas de potência ativa do sistema é de US$ 312.831,12. O
modelo matemático para o problema de alocação de RT’s para
este sistema apresenta as seguintes características: 12.255
variáveis contínuas, 897 variáveis binárias, 207 variáveis
inteiras e 9.469 restrições. A metodologia encontrou a
solução ótima do problema instalando três RT’s nos nós 10, 33
e 42; com um custo total de US$ 365.438,83, um custo de
investimento: US$ 60.000,00 e um custo de perdas de US$
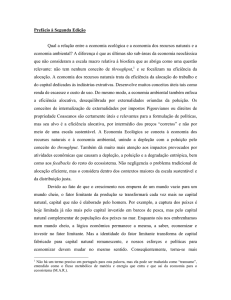
305.438,83. A Fig. 4 mostra o perfil das magnitudes de
tensão após a alocação dos RT’s.
Fig. 4. Perfil da magnitude de tensão do sistema de 70 nós com RT’s.
Tabela 1: Resultados do problema de alocação de RT’s - sistema de 70 nós
Taps
Nós
Demanda pesada
Demanda média
Demanda leve
10
+3
+3
+0
33
+5
+3
+0
42
+10
+5
+2
Tabela 2: Comparação das perdas do sistema de 70 nós, em kW
Demanda
Sem RT’s
Com RT’s
Pesada
932,50
899,66
Média
313,59
307,53
Leve
75,94
75,80
Note que o nó 66 apresenta a menor magnitude de tensão
em demanda pesada (11,816 kV). Com a alocação de três
RT’s foi possível resolver o problema das violações das
magnitudes de tensão. A Tabela 1 mostra as posições dos taps
dos três RT’s alocados para os três níveis de demandas. A
Tabela 2 mostra uma comparação das perdas de potência ativa
(sem RT’s e com alocação de RT’s) para os três níveis de
demandas. Note que depois de alocar três RT’s, o sistema
apresenta menores perdas comparando com o estado inicial.
B. Sistema de 202 nós
Para este sistema foram considerados somente os níveis de
demanda média e pesada, com uma duração de 7.760 e 1.000
horas, respectivamente. As magnitudes de tensão máxima e
mínima são de 13,8 kV e 12,83 kV, respectivamente. A Fig. 5
6
ilustra a magnitude de tensão inicial do sistema antes da
alocação de RT’s e podemos observar que existem nós na
demanda pesada em que a magnitude de tensão viola o limite
mínimo de tensão. O nó 132 apresenta a menor magnitude de
tensão em demanda pesada que é de 12,525 kV. O custo das
perdas de potência ativa inicial do sistema é de US$
716.521,79. O modelo matemático para o problema de
alocação de RT’s para este sistema apresenta as seguintes
características: 23.651 variáveis contínuas, 1.793 variáveis
binárias, 402 variáveis inteiras e 18.215 restrições. A
metodologia encontrou a solução ótima do problema
instalando dois RT’s nos nós 63 e 140; com um custo total de
US$ 743.449,47, um custo de investimento de US$ 40.000,00
e um de custo de perdas de US$ 703.449,47. A Fig. 6 mostra o
perfil das magnitudes de tensão após a alocação dos RT’s.
Com a alocação de dois RT’s foi possível resolver o problema
das violações das magnitudes de tensão. A Tabela 3 mostra a
posição dos taps dos dois RT’s alocados para os dois níveis de
demandas. A Tabela 4 mostra uma comparação das perdas de
potência ativa (sem RT’s e com alocação de RT’s) para os
dois níveis de demandas. Note que depois de alocar dois RT’s,
o sistema apresenta menores perdas comparando com o estado
inicial.
IV. CONCLUSÕES
Uma formulação linear inteira mista foi apresentada para
resolver o problema de alocação de reguladores de tensão em
sistema de distribuição radial. Esta formulação permite a
convergência para a solução ótima utilizando solvers
existentes. Adicionalmente, o ponto de operação em regime
permanente do sistema de distribuição radial foi modelado
utilizando expressões lineares. Os sistemas testes de 70 e 202
nós foram utilizados para mostrar a precisão do modelo
matemático, assim como a eficiência da técnica de solução
proposta. Esta formulação pode ser estendida para considerar a
alocação simultânea de banco de capacitores e RT’s.
V. REFERÊNCIAS
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
T. Gönen, “Electric Power Distribution Systems Engineering”, New
York: McGraw-Hill, 1986.
W. H. Kersting, “Distribution System Modeling and Analysis”. CRC
Press, 2001, ch. 7: Regulation of Voltages, pp. 145-198.
A. S. Safigianni e G. J. Salis. “Optimum voltage regulator placement in
a radial power distribution network”, IEEE Trans. Power Syst., vol. 15,
no. 2, pp. 879-886, May 2000.
J. Sugimoto, R. Yokoyama, Y. Fukuyama, V. V. R. Silva and H.
Sasaki, “Coordinated allocation and control of voltage regulators based
on reactive tabu search”, 2005 IEEE Rusian Power Tech Conference,
pp. 1-6. St. Petersburg, Russia 2005.
J. E. Mendonza, D. A. Morales, R. A. López, E. A. López, J. C.
Vannier e C. A. C. Coelho, “Multiobjective location of automatic
voltage regulators in a radial distribuition network using a micro
genetic algorithm”. IEEE Trans. Power Syst., vol 22, no. 1, pp. 404412, Feb. 2007.
M. Resener, R. H. Salim e A. S. Bretas. “Alocação e ajuste ótimo de
reguladores de tensão em sistemas de distribuição”. III Simpósio
Brasileiro de Sistemas Elétricos (SBSE), pp. 01-07, Belém, Pará, 2010.
I. Szuvovivsk. “Alocação simultânea de bancos de capacitores e
reguladores de tensão em sistemas de distribuição usando algoritmos
genéticos e fluxo de potência ótimo”. Dissertação (Mestrado),
Universidade Federal do Paraná. Departamento de Engenharia Elétrica,
Setor de Tecnologia, Março 2008.
C. A. N. Pereira. “Alocação ótima de reguladores de tensão em redes
de distribuição de energia elétrica”. Dissertação (Mestrado)–
Faculdade de Engenharia Elétrica e de Computação da UNICAMP
Universidade Estadual de Campinas, 2009.
Fig. 5. Perfil da magnitude de tensão do sistema de 202 nós sem RT’s.
Fig. 6. Perfil da magnitude de tensão do sistema de 202 nós com RT’s.
Tabela 3: Resultados do problema de alocação de RT’s - sistema de 202 nós
Taps
Nós
Demanda pesada
Demanda média
63
+5
+3
140
+7
+3
Tabela 4: Comparação das perdas do sistema de 202 nós, em kW
Demandas
Sem RT’s
Com RT’s
Pesada
2.572,86
2.498,99
Média
591,80
584,47
[9]
[10]
[11]
[12]
[13]
A. M. F. Almeida, H. D. M. Braz, F. M. P. Pamploma e B. A. de Souza.
“Planejamento integrado de bancos de capacitores e reguladores de
tensão em redes de distribuição”, VII Conferência Brasileira Sobre
Qualidade da Energia Elétrica (CBQEE 2007), pp. 01-06, Santos–SP,
2007.
T. A. da Luz, I. Szuvovivski e T. S. P. Fernandes. “Ajuste de
parâmetros de algoritmos genéticos usados na alocação de banco de
capacitores e reguladores de tensão em redes de distribuição”. In: XVIII
Congresso Brasileiro de Automação (CBA 2010), pp. 3356-3361,
Bonito–Ms, 2010.
R. Cespedes, “New method for the analysis of distribution networks,”
IEEE Trans. Power Del., vol. 5, no. 1, pp. 391-396, Jan. 1990.
R. Fourer; D. M. Gay e B. W. Kernighan. “AMPL: A modeling
language for mathematical programming”. CA: Brooks/Cole-Thomson
Learning, Pacific Grove, 2nd Ed., 2003.
“CPLEX Optimization subroutine library guide and reference, version
11.0”, CPLEX Division, ILOG Inc., Incline Village, NV, USA, 2008.