Capı́tulo 6
Introdução à mecânica celeste
Vamos estudar o problema geral de N corpos e analisar as constantes do movimento. Em
seguida estuda-se o problema de Kepler e o problema elı́ptico restrito dos três corpos e o
problema de Sitnikov. Analisa-se a existência de trajectórias caóticas no sistema solar.
6.1
O problema de N corpos
Consideram-se N corpos de massa mi , i = 1, . . . , N, em interacção através da lei da gravitação
universal. Cada corpo é localizado pelo vector de posição Ri , relativamente a um referencial
em posição geral S. Neste referencial, as equações do movimento dos N corpos são
N
mi m j
r ,
3 ij
j=1 |ri j |
mi R̈i = G Â
i = 1, . . . , N,
(6.1)
j6=i
em que ri j = Ri
sistema é
R j . O sistema de equações (6.1) é conservativo e a energia total do
N
1
Pi .Pi
2m
i
i=1
H=Â
N
N
mi m j
,
i=1 j=1 |ri j |
GÂ Â
(6.2)
j6=i
2 R3 .
em que Pi = mi Ṙi e Ri , Pi , ri j
O sistema de equações (6.1) tem no total 10 constantes do movimento: a energia total
(6.2) mais outras nove constantes do movimento, seis associadas ao movimento do centro
de massa e outras três associadas à conservação do momento angular total dos N corpos.
Veja-se então quais são as constantes do movimento associadas ao movimento do centro
de massa dos N corpos. Ora, por (6.1),
◆
N
N N
N N ✓
mi m j
mi m j
m j mi
 mi R̈i = G   |ri j |3 ri j = G   |ri j |3 ri j + |r ji |3 r ji = 0
i=1
i=1 j=1
i=1 j=1
j<i
j6=i
247
248
6. Introdução à mecânica celeste
pois, r ji = ri j . Assim,
N
 mi Ṙi = a,
(6.3)
i=1
em que a = (ax , ay , az ) é um vector constante. Nestas condições,
N
 mi Ri = at + b
(6.4)
i=1
e, no referencial S, o centro de massa dos N corpos tem movimento uniforme e rectilı́nio.
As equações que definem as seis constantes do movimento são então
N
 mi Ṙi (0)
= a
 mi Ri (0)
= b,
i=1
N
(6.5)
i=1
em que a = (ax , ay , az ) é a velocidade do centro de massa e b = (bx , by , bz ) é a posição
inicial do centro de massa. Neste caso a = (ax , ay , az ) e b = (bx , by , bz ) são 6 constantes do
movimentos.
Veja-se agora que o momento angular total dos N corpos é conservado. Comece-se por
calcular o momento da força total que actua o sistema. Ora,
N
 mi Ri ^ R̈i =
i=1
N
N
mi m j
R ^ (Ri
3 i
i=1 j=1 |ri j |
N
N
mi m j
R ^ R j = 0,
3 i
i=1 j=1 |ri j |
GÂ Â
R j) = G Â Â
j6=i
j6=i
pois Ri ^ R j = R j ^ Ri . Assim, o momento angular total do sistema conserva-se,
N
L = Â mi Ri ^ Ṙi = c,
(6.6)
i=1
e c = (Lx , Ly , Lz ) é uma constante.
Como o momento angular (6.6) é constante, o plano perpendicular ao vector c também
é conservado durante o movimento. Este plano designa-se por plano de Lagrange. Por
(6.6), este plano passa pelo centro de massa dos N corpos e contem o respectivo vector
velocidade do centro de massa, pois,
!
N
 mi Ri
i=1
N
 mi Ṙi
i=1
!
^c = 0
^c = 0.
6.2. O problema de Kepler
249
As 10 constantes do movimento encontradas (H, a, b e c) podem ser usadas para simplificar o problema do movimento dos N corpos através da escolha adequada de um referencial.
Concluı́mos assim que o problema de N corpos é descrito por 6N equações diferenciais
de primeira ordem. No entanto, devido à existência de 10 leis de conservação, existem
apenas 6N 10 equações diferenciais de primeira ordem independentes. Por exemplo, o
problema de 2 corpos é descrito por 2 equações diferenciais de primeira ordem e o problema
de 3 corpos é descrito por 8 equações. O sistema solar com os seus 8 planetas é descrito
por 44 equações diferenciais de primeira ordem.
6.2
O problema de Kepler
Vejamos agora como simplificar o problema dos 2 corpos. Como vimos, no referencial em
posição geral S, as equações do movimento de um sistema planetário de 2 corpos são
8
m1 m2
>
G
r12
< m1 R¨1 =
|r12 |3
(6.7)
m2 m1
>
: m2 R¨2 =
G
r
.
21
|r21 |3
Introduzindo as coordenadas do centro de massa,
RCM =
2
1
mi Ri ,
Â
(m1 + m2 ) i=1
no referencial do centro de massa S0 , R0 = R RCM , as equações do movimento (6.7)
escrevem-se na forma
8
m2 0
0
>
G 0 3 r12
< R¨1 =
|r12 |
(6.8)
m1 0
0
>
: R¨2 =
G 0 3 r21
,
|r21 |
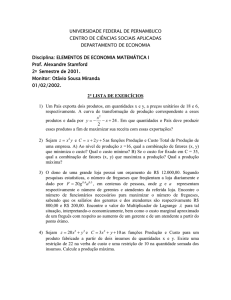
0 = R0
em que r12
R02 = r12 = r21 . Como neste referencial S0 , o centro de massa está
1
na origem das coordenadas, RCM = 0, e portanto, m1 R01 + m2 R02 = 0 (figura 6.1a)). Assim,
para resolver o problema dos 2 corpos, basta resolver apenas uma das equações em (6.8).
Escolhendo R02 como variável dependente, a equação diferencial a resolver é
0
R¨2 =
µ1
R02
,
|R02 |3
(6.9)
em que µ1 = Gm31 /(m1 + m2 )2 .
Pode-se usar outro referencial S00 de modo a que a origem de coordenadas coincida, por
exemplo, com o corpo número 1 (figura 6.1b)). Neste caso, por (6.7), obtém-se
s̈ =
µ
s,
|s|3
(6.10)
250
6. Introdução à mecânica celeste
a)
b)
S'
m1
S''
m2
m1
m2
Figura 6.1: Referenciais utilizados no estudo do problema de Kepler.
em que, para simplificar a notação, fizemos s = r21 = (x, y) 2 R2 e µ = Gm1 .
O sistema de equações (6.10) vai ser o ponto de partida para analisar o problema de 2
corpos, em que o corpo de massa m1 está na origem do referencial. Para o caso do sistema
Sol-Terra isto equivale a colocar a origem do referencial no Sol e |r| é a distância do Sol à
Terra. Como o movimento se dá no plano de Lagrange, podemos orientar o referencial S00
de modo a que o movimento seja planar. Neste caso, o sistema de equações (6.10) reduz-se
a um sistema de quatro equações de primeira ordem. Vejamos então como eliminar mais
duas equações através da conservação da energia e do momento angular.
O sistema (6.10) tem então as seguintes leis de conservação
L
H
= s ^ ṡ = (xẏ ẋy)ez = Lz ez
1 2
1
=
(ẋ + ẏ2 ) µ p
,
2
2
x + y2
(6.11)
em que s = (x, y). Note-se que tanto L como H têm o papel de um momento angular
efectivo e de uma energia total efectiva pois a massa m2 foi eliminada da equação (6.10).
Finalmente para reduzir (6.10) e (6.11) a um sistema de duas equações diferenciais de
primeira ordem, faz-se uma mudança de coordenadas cartesianas para coordenadas polares.
Com x = r cos q e y = r sin q , (6.10) e (6.11) reduzem-se a
8
>
r̈
>
<
Lz
>
>
: H
= rq̇ 2
µ
r2
= q̇ r2
1 2
=
(ṙ + r2 q̇ 2 )
2
1
µ ,
r
em que s = (x, y). Em função das coordenadas angulares r e q , tem-se então
8
Lz2 µ
>
>
>
r̈
=
>
>
r3 r2Z t
>
<
Lz
q (t) = q (0) +
dt
2
0 r
>
>
>
>
>
1 2 Lz2
1 1
>
: H
=
ṙ + 2 µ = ṙ2 +Ve f e (r),
2
2r
r
2
(6.12)
(6.13)
6.2. O problema de Kepler
251
2.0
Vefe (r)/|Vefe (r * )|
1.5
1.0
0.5
0.0
-0.5
-1.0
0
1
2
3
4
5
r/r *
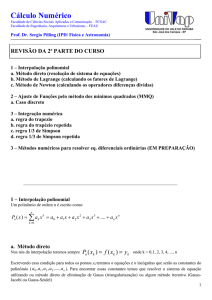
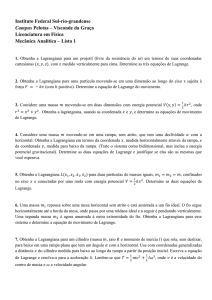
Figura 6.2: Energia potencial efectiva do problema de Kepler. Órbitas com energia total
efectiva negativa são elipses. Se a energia total efectiva é positivas as órbitas são hipérboles
e se a energia total efectiva é nula as órbitas são parábolas.
em que Ve f e (r) é o potencial efectivo do problema de Kepler e r 2 R+ .
Na figura 6.2 está representado o potencial efectivo Ve f e (r). Como o potencial efectivo
tem um mı́nimo local para
L2
r⇤ = z ,
(6.14)
µ
o problema de Kepler tem uma órbita circular para r = r⇤ . Como veremos, esta solução
corresponde a órbitas com excentricidade 0.
Vai-se agora mostrar que as órbitas do problema de Kepler podem ser elipses, parábolas
ou hipérbolas, i.e., as órbitas do problema de Kepler são sempre secções cónicas. Ora,
como
dr
dr dq
dr
Lz dr
=
= q̇
= 2
,
dt
dq dt
dq
r dq
tem-se que,
✓ ◆
Lz2 dr 2 Lz2 d 2 r
d2r
= 2 5
+ 4
.
dt 2
r
dq
r dq 2
Substituindo esta expressão na primeira equação em (6.13), obtém-se,
1 d2r
r2 dq 2
1
2 3
r
✓
dr
dq
◆2
+
µ
Lz2
1
= 0.
r
Com a substituição de variáveis u = 1/r, a equação anterior reduz-se a
d2u
µ
+u = 2 .
dq 2
Lz
252
6. Introdução à mecânica celeste
Esta equação tem a solução
u=
1
= A cos(q
r
q0 ) +
µ
,
Lz2
ou seja,
r(q ) =
Lz2 /µ
1 + ALz2 /µ cos(q
q0 )
:=
a(1 e2 )
,
1 + e cos(q q0 )
(6.15)
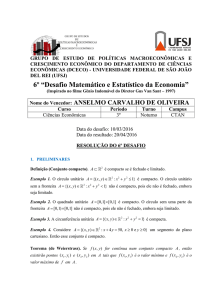
que é a equação paramétrica de uma secção cónica. A constante e = ALz2 /µ é a excentricidade da cónica, A é uma parâmetro relacionado com as condições iniciais e a =
Lz2 /(µ(1 e2 )) é o comprimento do eixo semi-maior da cónica. O periélio ou a distância
mais curta do planeta ao Sol é p = a ea = a f , a distância do planeta
p principal ao centro
da elipse é f e o comprimento do eixo semi-menor dapcónica é b = (a2 f 2 ) (figura 6.3).
A área da trajectória elı́ptica é, A = pab = pLz2 /(µ 1 e2 ). Na tabela 6.1 estão listados
alguns dos parâmetros dos sistemas Sol-Terra e Sol-Júpiter.
S''
b
P
Sol
a
Figura 6.3: Parâmetros da trajectória elı́ptica do problema de Kepler em que o Sol, o
planeta principal, está num dos focos da elipse. A elipse tem a equação paramétrica
(r(q ) cos q , r(q ) sin q ), em que r(q ) é dado por (6.15).
Se e = 0, a trajectória do corpo 2 em torno do corpo 1 é circular. Se 0 < e < 1, a trajectória é elı́ptica. Se e = 1, a trajectória é parabólica e se e > 1, a trajectória é hiperbólica.
Para simplificar, podemos adimensionalizar (apêndice D) as equações (6.13) e passar
para um sistema de coordenadas mais simples. Com as novas variáveis
8
µ
>
>
< v = Lz2 r
µ2
>
>
: t = 3 t,
Lz
(6.16)
6.2. O problema de Kepler
253
Planeta
Terra
Júpiter
Planeta
Terra
Júpiter
periélio
p [m]
1.471 ⇥ 1011
7.406 ⇥ 1011
µ = Gm1
[m3 s 2 ]
1.328 ⇥ 1020
1.328 ⇥ 1020
massa (m2 )
[kg]
5.97 ⇥ 1024
1.90 ⇥ 1027
eixo semi maior
a [m]
149.60 ⇥ 109
778.57 ⇥ 109
excentricidade
e
0.016
0.049
Lz
rq̇ 2 [ms 2 ]
2.20 ⇥ 10 7
1.24 ⇥ 10 9
Tabela 6.1: Parâmetros do sistema Sol-Terra e Sol-Júpiter. A massa do Sol é m1 = 1.99 ⇥
1030 kg e o valor de µ foi calculado com G = 6.672 ⇥ 10 11 m3 /kg.s2 .
o sistema (6.13) fica na forma reduzida
8
1
1
>
>
=
> v̈
3
>
v
v2Z t
>
<
1
q (t) = q (0) +
dt
2
0 v
>
>
>
>
1 2
1
1 1 2
>
: H
=
v̇ + 2
= v̇ +Ve f e (v) .
2
2v
v 2
(6.17)
Nas coordenadas (6.16), a equação radial (6.15) é
r(q ) =
1
1 + ALz2 /µ cos(q
q0 )
:=
a(1 e2 )
,
1 + e cos(q q0 )
(6.18)
e o comprimento do eixo semi-maior da elipse é da ordem de grandeza da unidade.
As soluções da equação (6.10) a que corresponde um espaço de fases quadridimensional e as soluções da equação (6.17) a que corresponde um espaço de fases bidimensional
contêm informação diferente sobre as órbitas do problema de Kepler. Por (6.18), decorre
que cada solução da equação (6.17) no espaço de fases corresponde uma famı́lia contı́nua
de solução no espaço de configurações. Esta famı́lia contı́nua são todas as órbitas que se
obtêm de uma dada órbita através de uma rotação. As órbitas da famı́lia são parametrizadas
por q0 . Na figura 6.4 estão representadas as órbitas de fase da equação (6.17).
O problema de Kepler tem ainda outra constante do movimento, o vector de LaplaceRunge-Lenz. Ora, por (6.10) e (6.11), e com,
A = ṡ ^ L
µ
s
= (ẏLz
|s|3
µ
x
)ex
|s|
(ẋLz + µ
y
)ex
|s|
vem que, dA
dt = 0. Assim, o vector de Laplace-Runge-Lenz A é uma constante do movimento. Tomando como (x, y) as coordenadas do periélio, a única componente não nula
254
6. Introdução à mecânica celeste
2
p
ν
1
0
-1
-2
0.0
0.5
1.0
ν
1.5
2.0
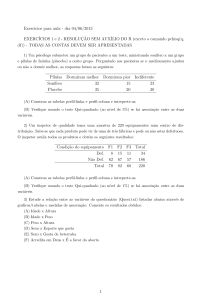
Figura 6.4: Órbitas de fase da equação (6.17). A curva de fase correspondente às
órbitas parabólicas está indicada com a letra “p”. As curvas de fase interiores à órbita
“p”correspondem a trajectórias elı́pticas no espaço de configurações. As curvas de fase
exteriores à órbita “p”correspondem a trajectórias hiperbólicas.
do vector A aponta segundo a direcção negativa de ex , pelo que, se Lz > 0, o vector de
Laplace-Runge-Lenz A aponta do periélio para o afélio.
6.3
O problema restrito dos três corpos
O problema restrito dos três corpos consiste em adicionar um terceiro corpo ao problema
de Kepler, assumindo que a sua massa é tão pequena que não perturba o movimento dos
dois corpos principais ou primários. Este modelo é importante para estudar o movimento
de satélites artificiais ou de pequenos asteroides. O seu estudo foi iniciado por Newton,
d’Alembert, Euler, Lagrange e Poincaré.
Y S
m1
m3
m2 X
Figura 6.5: Referencial de inércia e sistema de coordenadas para o problema restrito dos 3
corpos.
Vai-se considerar o movimento de dois corpos no plano de Lagrange, com um refe-
6.3. O problema restrito dos três corpos
255
rencial colocado no centro de massa (figura 6.5). As coordenadas do plano são (X,Y ).
Neste caso, por (6.9), (6.10), (6.12) e (6.13), a equação que descreve o movimento dos dois
corpos é
8
Lz2 µ1
>
< r̈
=
r3
r2Z t
(6.19)
Lz
>
: q (t) = q (0) +
dt
2
0 r
em que µ1 = Gm31 /(m1 +m2 )2 e Lz = q̇ r2 é o momento angular reduzido do corpo de massa
m2 . As posições dos dois corpos no plano de Lagrange são dadas por
8
>
< R2 = (r(q ) cos(q ), r(q ) sin(q ))
(6.20)
m2
>
: R1 =
(r(q ) cos(q ), r(q ) sin(q )),
m1
em que r(q ) está definido em (6.18). Neste referencial, o movimento dos dois corpos é
elı́ptico e o foco da elipse coincide com o centro de massa dos dois corpos. Na figura 6.6
estão representadas duas trajectórias possı́veis dos dois corpos primários m1 e m2 e calculadas de acordo com (6.20).
Podemos calcular as condições que permitem prever quais as configurações possı́veis
das primárias como representadas na figura 6.6. Vamos supor que as trajectórias se intersectam como no caso da figura 6.6a). Assim, como os corpos estão sempre angularmente
2
desfasados de p, por (6.20), tem que se ter, r(q ) cos(q ) = m
p) cos(q p), ou
m1 r(q
m2
seja, r(q ) = m1 r(q p). Resolvendo esta última equação, obtém-se,
cos(q ) =
1 m2 /m1
.
e(1 + m2 /m1 )
(6.21)
Mas como 1 cos(q ) 1, das duas desigualdades aplicadas a (6.21) conclui-se que, se
uma das seguintes condições é verificada,
se m2 /m1 1,
e
se m2 /m1
e
1,
1 m2 /m1
1 + m2 /m1
m2 /m1 1
,
1 + m2 /m1
(6.22)
então as trajectórias dos dois corpos primários intersectam-se. Se nenhuma das condições
(6.22) se verificar, tem-se a configuração da figura 6.6b).
Considere-se um terceiro corpo de massa m3 e tal que m3 << m1 e m3 << m2 . Por
hipótese, assume-se que o terceiro corpo não afecta as trajectórias dos dois outros corpos
(problema restrito dos 3 corpos). O Lagrangeano do movimento da massa m3 é
1
m1 m3
m2 m3
L = m3 (Ẋ 2 + Ẏ 2 + Ż 2 ) + G
+G
,
2
|R31 |
|R32 |
(6.23)
256
6. Introdução à mecânica celeste
a)
b)
m2
m2
m1
m1
Figura 6.6: Trajectórias no espaço de configurações dos dois corpos primários m1 e m2 . As
trajectórias são percorridas no sentido anti horário. a) e = 0.5 e m2 /m1 = 0.8. b) e = 0.5,
m2 /m1 = 0.1. O caso a) verifica uma das condições (6.22) e o caso b) não verifica nenhuma.
em que
R31
R32
p
= p(X
=
(X
X1 )2 + (Y
X2 )2 + (Y
Y1 )2 + Z 2 ,
Y2 )2 + Z 2
(6.24)
e (X1 ,Y1 ) e (X2 ,Y2 ) são as posições das massas m1 e m2 , determinadas por (6.19) e (6.20)
(figura 6.5). Nestas condições, o Lagrangeano (6.23) é dependente do tempo.
As equações de Lagrange para o movimento do terceiro corpo são,
8
X X1
X X2
>
Gm1
Gm2
> Ẍ =
>
3
|R
|
|R32 |3
>
31
>
>
<
Y Y1
Y Y2
Ÿ =
Gm1
Gm2
(6.25)
3
|R31 |
|R32 |3
>
>
>
>
>
Z
Z
>
: Z̈ =
Gm1
Gm2
.
3
|R31 |
|R32 |3
R
y
YS
m3
m2
m1
x
X
Figura 6.7: Referencial de inércia S e referencial sinódico R para o problema restrito dos 3
corpos. O referencial R acompanha o movimento Kepleriano de rotação das massas m1 e
m2 .
Vai-se agora simplificar as equações (6.25), assumindo que o movimento dos dois corpos m1 e m2 é circular em torno do centro de massa. Fica-se assim no contexto do problema
6.3. O problema restrito dos três corpos
257
circular restrito dos 3 corpos. Neste caso, por (6.19) e (6.14), o raio da órbita da massa m2
é r1⇤ = Lz2 /µ1 e q = q (0) + tµ12 /Lz3 (mod. 2p). Vamos então introduzir um referencial em
rotação R que acompanha o movimento circular dos dois corpos —- referencial sinódico
(figura 6.7). Com as novas variáveis
x
y
z
= X cos q +Y sin q
=
X sin q +Y cos q
= Z
e com X2 = r1⇤ cos q , Y2 = r1⇤ sin q , X1 =
(6.23) escreve-se na forma,
L
=
(6.26)
m2 X2 /m1 e Y1 =
m2Y2 /m1 , o Lagrangeano
1
m3 (ẋ2 + ẏ2 + ż2 + q̇ 2 (x2 + y2 ) + 2q̇ (xẏ ẋy))
2
m1 m3
m2 m3
+G p
+Gp
.
2
2
2
2
2
(x + m2 Lz /(µ1 m1 )) + y + z
(x Lz /µ1 )2 + y2 + z2
(6.27)
Nesta aproximação, considerou-se que o movimento dos corpos primários é circular e uniforme. Assim, as equações de Lagrange para o movimento circular restrito dos 3 corpos
são,
8
µ12
>
>
ẍ
2
ẏ
>
>
Lz3
>
>
>
>
>
>
>
>
>
>
>
>
>
>
µ2
<
ÿ + 2 13 ẋ
Lz
>
>
>
>
>
>
>
>
>
>
>
>
z̈
>
>
>
>
>
>
:
=
=
=
x + m2 Lz2 /(µ1 m1 )
((x + m2 Lz2 /(µ1 m1 ))2 + y2 + z2 )3/2
x Lz2 /µ1
Gm2
((x Lz2 /µ1 )2 + y2 + z2 )3/2
µ14
y
y Gm1
Lz6
((x + m2 Lz2 /(µ1 m1 ))2 + y2 + z2 )3/2
y
Gm2
2
2
((x Lz /µ1 ) + y2 + z2 )3/2
z
Gm1
2
((x + m2 Lz /(µ1 m1 ))2 + y2 + z2 )3/2
z
Gm2
.
((x Lz2 /µ1 )2 + y2 + z2 )3/2
µ14
x
Lz6
Gm1
(6.28)
Para adimensionalizar as equações (6.28), tal como fizemos em (6.16), introduzem-se
as variáveis
u=
µ1
x,
sLz2
v=
µ1
y,
sLz2
w=
µ1
z,
sLz2
t=
µ12
t,
Lz3
(6.29)
em que s = (m1 + m2 )/m1 . Nas novas variáveis (u, v, w), os dois corpos primários estão à
distância 1.
258
6. Introdução à mecânica celeste
Com (6.29), as equações (6.28) escrevem-se então na forma
8
u+µ
u (1 µ)
>
>
ü 2v̇ = u (1 µ)
µ
>
3/2
2
2
2
>
((u + µ) + v + w )
((u (1 µ))2 + v2 + w2 )3/2
>
>
<
v
v
v̈ + 2u̇ = v (1 µ)
µ
2 + v2 + w2 )3/2
2 + v2 + w2 )3/2
>
((u
+
µ)
((u
(1
µ))
>
>
>
w
w
>
>
=
(1 µ)
µ
,
: ẅ
((u + µ)2 + v2 + w2 )3/2
((u (1 µ))2 + v2 + w2 )3/2
(6.30)
em que as derivados temporais referem-se à variável t e
µ=
m2
.
(m1 + m2 )
(6.31)
No referencial sinódico, a massa m1 está no ponto ( µ, 0, 0) e a massa m2 no ponto ((1
µ), 0, 0).
As equações (6.30) podem ser derivadas do Lagrangeano efectivo
=
L
1 2
(u̇ + v̇2 + ẇ2 + u2 + v2 + 2(uv̇ u̇v))
2
1
+(1 µ) p
+µp
(u + µ)2 + v2 + w2
(u
1
(1
µ))2 + v2 + w2
.
(6.32)
Como o sistema (6.30) é conservativo, podemos encontrar o hamiltoniano efectivo do
sistema. Por (6.32), os momentos generalizados são
8
∂L
>
pu =
= u̇ v ) u̇ = pu + v
>
>
>
∂ u̇
>
>
<
∂L
(6.33)
pv =
= v̇ + u ) v̇ = pv u
>
∂
v̇
>
>
>
>
>
: p = ∂ L = ẇ
w
∂ ẇ
e tem-se o hamiltoniano,
H
1
= (pu , pv , pw ).(u̇, v̇, ẇ) L = (u̇2 + v̇2 + ẇ2 ) +Ve f e (u, v, w)
2
1
2
2
=
((pu + v) + (pv u) + ẇ2 ) +Ve f e (u, v, w),
2
(6.34)
em que
Ve f e =
1 2
(u + v2 )
2
(1
µ) p
1
µp
(u
1
.
µ))2 + v2 + w2
(6.35)
O integral primário (6.34) é designado por constante de Jacobi. De facto, H não é uma
energia por se estar no referencial sinódico. Assim, o integral primário de Jacobi é uma
(u + µ)2 + v2 + w2
(1
6.3. O problema restrito dos três corpos
259
“energia efectiva” no referencial sinódico. Claro está que, neste referencial, o movimento
do terceiro corpo obedece à lei de conservação H = C.
Vamos agora restringir-nos ao movimento no plano w = 0 e fazer a análise qualitativa
do sistema de equações (6.30).
Escrevendo (6.30) como um sistema de equações diferenciais de primeira ordem, obtémse
8
u̇ = ū
>
>
>
>
>
>
>
u+µ
u 1+µ
>
>
˙
>
> ū = 2v̄ + u (1 µ) ((u + µ)2 + v2 + w2 )3/2 µ ((u (1 µ))2 + v2 + w2 )3/2
>
>
>
>
>
>
< v̇ = v̄
>
>
v̄˙
>
>
>
>
>
>
>
ẇ
>
>
>
>
>
>
>
>
: w̄˙
=
2ū + v
(1
µ)
v
((u + µ)2 + v2 + w2 )3/2
µ
((u
(1
v
µ))2 + v2 + w2 )3/2
= w̄
=
(1
µ)
w
((u + µ)2 + v2 + w2 )3/2
µ
((u
(1
w
.
µ))2 + v2 + w2 )3/2
(6.36)
Por (6.33) e (6.34), as coordenadas dos pontos fixos do campo de vectores (6.36) são os
pontos crı́ticos do potencial efectivo (6.35), com velocidades ū = v̄ = w̄ = 0. As condições
para a determinação dos pontos crı́ticos de Ve f e são
8 ∂V
u+µ
u 1+µ
efe
>
=
u + (1 µ) 3 + µ
=0
>
< ∂u
r1
r23
(6.37)
∂Ve f e
>
v
v
>
:
=
v + (1 µ) 3 + µ 3 = 0,
∂v
r1
r2
em que
r1 = ((u + µ)2 + v2 )1/2
r2 = ((u (1 µ))2 + v2 )1/2 .
(6.38)
O primeiro conjunto de pontos fixos corresponde a fazer v = 0 na segunda equação em
(6.37). Neste caso, existem 3 pontos fixos ao longo da linha v = 0 e as suas coordenadas
em u são os pontos maximizantes da função
Ve f e (u, 0) =
1 2
u
2
(1
µ) p
1
(u + µ)2
µp
1
(u
(1
µ))2
.
(6.39)
Designado por u1 , u2 e u3 estas coordenadas, com, u3 < µ < u1 < (1 µ) < u2 , e u1 , u2
e u3 os primeiros três pontos de Lagrange têm coordenadas (figura 6.8)
L1 : (u1 , v1 = 0)
L2 : (u2 , v2 = 0)
L3 : (u3 , v3 = 0) .
(6.40)
260
6. Introdução à mecânica celeste
Existem mais dois pontos fixos do campo de vectores (6.36). Fazendo r1 = r2 na segunda equação em (6.37), a sua solução é (u + µ)2 + v2 = 1 e a primeira equação em (6.37)
é verificada. A condição r1 = r2 implica que existem mais dois pontos fixos em posição
simétrica relativamente ao eixo v = 0 e sobre a circunferência (u + µ)2 + v2 = 1 que passa
pelas posições das massas m1 e m2 . Assim, r1 = r2 = 1 e as coordenadas destes dois pontos
fixos são (figura 6.8)
L4 : (u4 =
L5 : (u5 =
p
µ + 1/2, v4 = p
3/2)
µ + 1/2, v5 =
3/2) .
(6.41)
Os pontos fixos (6.40) e (6.41) designam-se por pontos de Lagrange, figura 6.8. No
referencial sinódico, os pontos de Lagrange L3 e L4 e os primários estão dispostos sobre
um quadrilátero regular. Como os dois primários e qualquer dos pontos de Lagrange L3 e
L4 formam um triângulo equilátero, estes pontos de Lagrange também são designados por
pontos equiláteros.
L4
v
m1
L3
m2
L1
-μ
1-μ
u
L2
L5
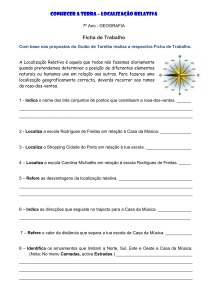
Figura 6.8: Localização dos pontos de Lagrange para µ = 0.1.
Na figura 6.9 estão representados as posições dos corpos primários e dos correspondentes pontos de Lagrange sobrepostos ao potencial efectivo (6.35). Os pontos de Lagrange
L1 , L2 e L3 foram descobertos por Euler em 1750. Os pontos L4 e L5 foram descobertos
por Lagrange em 1760. Na tabela 6.2 estão representados os parâmetros do problema de 3
corpos para vários sistemas de planetas primários do sistema solar.
Vamos agora analisar a estabilidade dos pontos de Lagrange.
Para analisar a estabilidade dos pontos de Lagrange L4 e L5 vamos então calcular a
matriz jacobiana do sistema de equações (6.36). Por um cálculo simples, as matrizes Jaco-
6.3. O problema restrito dos três corpos
Sol-Terra
Sol-Júpiter
Terra-Lua
µ
0.000003
0.000954
0.012150
261
L1
0.9900
0.9324
0.8377
L2
1.0100
1.0688
1.1551
L3
1.0000
1.0004
1.0050
Tabela 6.2: Parâmetro µ e localização dos pontos de Lagrange L1 , L2 e L3 de vários sistemas de planetas primários do sistema solar.
Figura 6.9: Potencial efectivo e pontos de Lagrange do problema circular restrito dos 3
corpos para µ = 0.1.
bianas em L4 e L5 são
0
B
J4 = B
@
0
B
J5 = B
@
0
3
4
p 0
3
4 3(1 2µ)
0
3
4
p
3
4
0
3(2µ
1)
1
0
0
2
1
0
0
2
p
3
4
p
3
4
Ambas as matrizes têm o polinómio caracterı́stico
p(x) = x4 + x2 + 27µ/4
1
0
0
3(1 2µ) 2C
C
0
1A
9
0
4
0
3(2µ
0
9
4
1
0
1) 2C
C.
1A
0
27µ 2 /4,
262
6. Introdução à mecânica celeste
cujas raı́zes são
q
p
l1,2 = ± ( 1 + 1 27µ + 27µ 2 )/2
q
(6.42)
p
l3,4 = ± ( 1
1 27µ + 27µ 2 )/2 .
p
p
Como
o polinómio p(µ) = 1+ 1 27µ + 27µ 2 é negativo para µ 2 M = (9
69)/18, 9+
p
69)/18) = (0.0385, 0.9615), no intervalo aberto M, os valores próprios (6.42) são complexos com partes reais diferentes de zero. Assim, no intervalo aberto M, existe sempre
pelo menos um valor próprio com parte real positiva e os pontos fixos L4 e L5 são instáveis.
No intervalo aberto M, os pontos fixos L4 e L5 têm uma variedade estável e uma variedade instável, ambas de dimensão 2. Neste caso, ambos os pontos fixos são hiperbólicos e
portanto são instáveis.
Sejam os intervalos fechados C1 e C2 definidos por C1 [ C2 = [0, 1] \ M c . Se µ 2
Ci tem-se que 0 p(µ) 1 e os valores próprios (6.42) são imaginários puros. Então
nos intervalos fechados C1 e C2 , os pontos fixos L4 e L5 têm uma variedade central de
dimensão 4. Na figura 6.10 estão representadas as partes reais e imaginárias dos valores
próprios (6.42) em função do parâmetro µ. A estabilidade destes pontos fixos só poderá
ser determinada por técnicas de variedade central.
Im(λi )
1.0
Re(λi )
0.6
0.4
0.2
-0.2
-0.4
-0.6
0.5
0.2
0.4
0.6
0.8
1.0
μ
0.2
0.4
0.6
0.8
1.0
μ
-0.5
-1.0
Figura 6.10: Partes reais e imaginárias dos valores próprios (6.42) em função do parâmetro
µ.
Como os pontos de Lagrange L4 e L5 acompanham a órbita dos planetas em torno do
Sol, é muito provável que existam asteroides com órbitas quase-periódicas no referencial
sinódico. Devido à localização particular de L4 e L5 , estes pontos fazem um ângulo de 600
relativamente à trajectória do segundo primário. Estes asteroides designam-se por Troianos.
A Terra tem 1 Troiano conhecido mas Júpiter tem mais de um milhão de Troianos com
diâmetros superiores a 1 km.
Façamos agora a análise da estabilidade dos pontos de Lagrange L1 , L2 e L3 .
Na figura 6.11 está representado o gráfico da secção v = 0 do potencial efectivo, (6.39).
As coordenadas dos máximos locais desta função determinam os pontos de Lagrange L1 ,
L2 e L3 . Como nestes pontos o potencial efectivo tem um máximo local segundo a secção
v = 0, os pontos de Lagrange L1 , L2 e L3 são pontos fixos instáveis da equação (6.36).
Como não é possı́vel determinar explicitamente as coordenadas dos pontos de Lagrange
6.3. O problema restrito dos três corpos
263
0
Vefe (u,0)
-5
-10
-15
-20
-2
-1
0
u
1
2
Figura 6.11: Secção (6.39) do potencial efectivo do problema circular restrito dos 3 corpos
para µ = 0.1. As coordenadas dos máximos locais desta função determinam os pontos de
Lagrange L1 , L2 e L3 .
L1 , L2 e L3 , calcularam-se numericamente, em cada ponto fixo, os valores próprios das matrizes Jacobianas do sistema de equações (6.36). A variação dos valores próprios destas
matrizes em função do parâmetro µ está representada na figura 6.12. Como se infere facilmente, estes pontos fixos têm dois valores próprios reais e dois valores próprios imaginários
puros. Assim, os espaços tangentes em qualquer dos pontos fixos L1 , L2 e L3 podem ser
decomposto na forma R4 = E s + E u + E c . Os espaços tangentes às variedades estáveis e
instáveis têm dimensão 1 e os espaços tangentes às variedades centrais têm dimensão 2.
Koon et al. (Chaos 2000) mostraram que existe uma conexão heteroclı́nica entre L1 e L2 ,
podendo assim existir transferências entre trajectórias fechadas em torno destes pontos.
Desta análise conclui-se que é possı́vel existirem, sobre uma variedade de dimensão
2 do espaço das fases, órbitas periódicas. No entanto, isto só pode ser determinado por
técnicas de variedades centrais. Para condições iniciais em posição geral, as trajectórias de
fase na vizinhança dos pontos de Lagrange L1 , L2 e L3 são instáveis.
Do ponto de vista das aplicações, as primeiras missões espaciais de longo curso como a
Voyager1 e a Galileu2 tiveram trajectórias baseadas no problema de Kepler. Recentemente,
na missão Genesis (Agosto 2001 a Setembro de 2004) colocou-se um satélite numa órbita
halo3 em torno do ponto fixo L1 do sistema Sol-Terra, com o objectivo de recolher poeiras
de origem solar. A Genesis Discovery Mission foi a primeira missão baseada na dinâmica
do problema restrito dos 3 corpos. Nesta missão as órbitas de transferência seguiram as
trajectórias associadas às variedades estáveis e instáveis dos pontos de Lagrange.
Podemos ainda analisar qualitativamente a estrutura das trajectórias em torno dos pon1 Os satélites artificiais Voyager 1 e 2 foram lançados em 1977 com o objectivo de fotografarem Júpiter e
Saturno e recolherem informação cientı́fica sobre as regiões exteriores ao sistema solar. Em 2011, estes satélites
encontravam-se para além da órbita de Plutão e continuavam a enviar dados para a Terra.
2 O satélite artificial Galileu, lançado em Outubro de 1989, teve como missão analisar a atmosfera de Júpiter.
Nesta missão descobriu-se a lua (Dactyl) do asteroide 243 Ida da cintura de Kuiper, observaram-se as atmosferas
de algumas das luas de Júpiter e observou-se a colisão do cometa Shoemaker-Levi 9 com Júpiter, em Julho de
1994. O satélite entrou na atmosfera de Júpiter a 21 de Setembro de 2003 e despenhou-se na sua superfı́cie.
3 A trajectória fechada em torno de L ou L prolonga-se para uma trajectória recorrente no espaço a três
1
2
dimensões. Esta trajectória designa-se por trajectória halo ou trajectória de Lissajous.
264
6. Introdução à mecânica celeste
L1
Re(λi )
4
2
0.2
0.4
0.6
0.8
μ
1.0
-2
-4
L2
Re(λi )
0.2
0.4
0.6
0.8
μ
1.0
0.6
0.8
μ
1.0
0.6
0.8
μ
1.0
L2
1
1
0.2
0.4
0.6
0.8
μ
1.0
-2
0.2
0.4
-1
-2
L3
Re(λi )
L3
Im(λi )
2
2
1
1
-1
-1
-2
-3
Im(λi )
2
2
-1
L1
Im(λi )
3
2
1
0.2
0.4
0.6
0.8
μ
1.0
-2
0.2
0.4
-1
-2
Figura 6.12: Variação em função de µ dos valores próprios das matrizes Jacobianas do
sistema de equações (6.36) para L1 , L2 e L3 .
tos de Lagrange. Para isso, vamos analisar as curvas de nı́vel do potencial efectivo (6.35).
Como se viu em (6.34) e (6.35), o movimento dá-se segundo a lei de conservação
1
H = (u̇2 + v̇2 + ẇ2 ) +Ve f e (u, v, w) = C
2
em que C é uma constante. Como a energia cinética do terceiro corpo é sempre positiva,
tem-se que C Ve f e (u, v, w) > 0. Ou seja, as curvas de velocidade zero (C Ve f e (u, v, w) =
0), delimitam uma região no espaço (u, v), inacessı́vel ao terceiro corpo. Esta região inacessı́vel é caracterizada pela equação C Ve f e (u, v, w) < 0. Na figura 6.13 estão representadas as várias curvas de nı́vel de velocidade zero, assim como as regiões inacessı́veis ou
regiões de Hill. A trajectória do terceiro corpo não pode cruzar nenhuma das regiões de
Hill. As transições entre as várias topologias possı́veis das regiões de Hill são determinadas
pelas condições Ci = Ve f e (Li ).
6.4
O problema de Sitnikov
O problema de Sitnikov consiste em considerar que o movimento do terceiro corpo se dá
na direcção perpendicular ao plano de Lagrange que passa pelo centro de massa dos dois
planetas primários m1 e m2 . Neste caso, por (6.25) e (6.24), a equação do movimento do
6.4. O problema de Sitnikov
2C
3
C1
1
1
0
0
v
v
2
H
-1
-2
-2
2
-1
0
u
1
-2
-2
2
2C
C2
1
1
0
0
H
-1
-2
-2
-1
0
u
H
-1
v
v
265
-1
0
u
2
-2
-2
2
1
2
4,5
H
H
-1
1
1
-1
0
u
Figura 6.13: Regiões de Hill para o problema circular restrito dos 3 corpos. A trajectória
do terceiro corpo não pode cruzar nenhuma das regiões de Hill, assinaladas com H. As
quatro regiões apresentadas foram calculadas com as condições Ve f e (u, v, w) = C1 = 1.9,
Ve f e (u, v, w) = C2 = 1.75, Ve f e (u, v, w) = C3 = 1.6, Ve f e (u, v, w) = C4,5 = 1.48. O
parâmetro do potencial efectivo (6.35) é µ = 0.1 e Ve f e (L1 ) = 1.798, Ve f e (L2 ) = 1.733,
Ve f e (L3 ) = 1.550 e Ve f e (L4,5 ) = 1.455.
266
6. Introdução à mecânica celeste
terceiro corpo é
Z̈ = Gm1
Z
(X12 +Y12 + Z 2 )3/2
Gm2
Z
.
(X22 +Y22 + Z 2 )3/2
(6.43)
Se o movimento das primárias é circular, X12 + Y12 = m21 Lz4 /(µ12 m22 ), X22 + Y22 = Lz4 /µ12 e
obtemos a equação autónoma
Z̈ = Gm1
Z
(m22 Lz4 /(µ12 m21 ) + Z 2 )3/2
Gm2
Z
.
(Lz4 /µ12 + Z 2 )3/2
(6.44)
Para adimensionalizar as equações (6.44), introduzem-se as variáveis
w=
G2 µ15
µ1
Z,
t
=
t,
Lz2
(m1 + m2 )3 Lz3
(6.45)
e a equação (6.44) escreve-se na forma
ẅ =
w
(m22 /m21 + w2 )3/2
(m2 /m1 )
w
,
(1 + w2 )3/2
(6.46)
em que a derivada é tomada em ordem à variável independente t.
Como se vê na simulação da figura 6.14, a equação (6.46) admite soluções periódicas.
w
2
1
w
5
10
15
20
�
-1
-2
Figura 6.14: Trajectória periódica para o problema circular de Sitnikov, para m2 /m1 = 0.1.
Quando se perturba o problema de Sitnikov para o caso elı́ptico, a equação (6.44) fica
dependente do tempo e o terceiro corpo tem trajectórias caóticas.


![[Spencer] tornou-se o mais claro expositor de doutrinas que a](http://s1.studylibpt.com/store/data/004948114_1-1be12dcc782421314fd2d3cd39b45739-300x300.png)