
CADERNO DE FÍSICA DA UEFS 04 (01 e 02):
177-195, 2006
APLICAÇÕES DE MÉTODOS DE TOPOLOGIA E GEOMETRIA
DIFERENCIAL À FÍSICA∗
Sebastião Alves Dias
Centro Brasileiro de Pesquisas Fı́sica - CBPF
Apresentamos alguns métodos matemáticos de amplo alcance na fı́sica atual. A partir de
uma apresentação elementar dos espaços quocientes, descrevemos a técnica do grupo de
homotopia. Mencionamos, ao final, as aplicações da teoria de variedades diferenciáveis à
Fı́sica.
I.
INTRODUÇÃO
A Fı́sica é uma ciência descritiva. Por isto, queremos dizer que não é pretensão do fı́sico
encontrar a razão última da existência do mundo e de seus objetos, mas procurar entender,
nos termos mais elementares possı́veis (ou seja, com um mı́nimo de conceitos primitivos e postulados), a forma como o mundo se organiza e evolui no tempo. Dito isto, é verdadeiramente
surpreendente que a Matemática tenha se tornado um instrumento tão fundamental para a
descrição da natureza. As leis fı́sicas, historicamente, conseguiram a sua expressão mais fiel
através dos recursos matemáticos e, em muitas situações, até mesmo contribuı́ram para o desenvolvimento de novos conceitos na Matemática. Tal interação remonta aos povos da Antiguidade
e continua viva e forte até os dias atuais.
No inı́cio do século XX, com a criação da Relatividade Geral, os desenvolvimentos teóricos
na Fı́sica de Partı́culas Elementares e o avanço da Fı́sica da Matéria Condensada, novos ramos
da Matemática, que tinham encontrado pouca aplicação à Fı́sica até então, entraram no cenário.
Objetos estudados com técnicas de Geometria Diferencial, como as variedades riemannianas e os
espaços fibrados tornaram-se extremamente relevantes para a descrição da Gravitação. Métodos
como os grupos de homologia, co-homologia e homotopia encontraram suas aplicações ao estudo
de fenômenos previstos pela Fı́sica de Altas Energias e pela Fı́sica da Matéria Condensada.
∗
Este trabalho é oriundo da palestra apresentada pelo autor na IX Semana de Fı́sica da UEFS ocorrida no
perı́odo de 18 a 22 de setembro de 2006.
177
Sebastião Alves Dias
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
Por outro lado, a Teoria das Cordas propiciou o desenvolvimento de novas técnicas na área
de Topologia Algébrica e as chamadas Teorias Topológicas de Campos foram fundamentais na
resolução de problemas antigos num ramo da Matemática chamado de Teoria dos Nós.
Este seminário visa apresentar, de maneira sucinta, algumas técnicas matemáticas que tem
encontrado aplicações modernas na Fı́sica, em todas as suas áreas. Vamos nos concentrar nos
espaços quocientes (com maior detalhe), devido ao fato destes espaços serem o ponto de partida
para uma ampla variedade de métodos matemáticos. A partir daı́, apresentaremos o conceito
de homotopia e de grupo fundamental, e apenas mencionaremos a definição das variedades
diferenciáveis e seu papel nas modernas teorias das interações fundamentais. A maior parte
dos assuntos que abordaremos aqui poderá ser estudada em muito maior detalhe na bibliografia
citada ao final destas notas [1–3], onde também poderão ser encontradas muitas referências a
mais, inclusive aos trabalhos originais.
II.
LEIS DE COMPOSIÇÃO, HOMOMORFISMOS E GRUPOS
Começamos imaginando um conjunto X no qual esteja definida uma operação (que chamaremos de lei de composição) que associa, a cada dois elementos de X, digamos a e b, um terceiro
elemento que chamaremos de a ◦ b. Como exemplo, podemos tomar o conjunto de todas as
matrizes n × n reais, com a seguinte lei de composição:
a ◦ b = ab − ba = [a, b] ,
onde ab refere-se ao produto de matrizes usual. Observe que a lei de composição acima não é
necessariamente comutativa (a ◦ b = b ◦ a) nem associativa ((a ◦ b) ◦ c = a ◦ (b ◦ c)).
Considere dois conjuntos, X e Y , onde sejam definidas leis de composição. Vamos denotar
a operação em X pelo sı́mbolo ◦ e a operação em Y por ∗. Assim, estamos supondo que, se a
e b pertencem a X, a ◦ b também pertence, e se u e v pertencem a Y , u ∗ v ∈ Y . Um mapa
f : X → Y é chamado de homomorfismo se
f (a ◦ b) = f (a) ∗ f (b) .
Podemos ver que a estrutura algébrica do espaço X é preservada em Y , ou seja, o que acontece
em X entre a e b acontece em Y entre f (a) e f (b). Se, além disso, o mapa f for bijetivo
(sobrejetivo e injetivo), o homomorfismo em questão é chamado de isomorfismo, os espaços X
e Y são ditos isomorfos e este fato é denotado por X ∼
=Y.
178
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
Aplicações de Métodos de ...
Um tipo particular de conjunto dotado de lei de composição será muito importante para
os nossos propósitos. Um grupo G é um conjunto dotado de uma lei de composição (que
indicaremos por “·”) que associa a cada dois elementos um terceiro (pode ser um dos dois)
pertencente ao mesmo conjunto (dizemos que o conjunto é fechado pela lei de composição em
questão), de modo que os requisitos abaixo sejam satisfeitos:
1. Existe um elemento, que chamaremos de e, tal que, se g ∈ G, g · e = e · g = g;
2. Para todo g ∈ G, existe um elemento g−1 , tal que g · g−1 = g−1 · g = e;
3. A associação de três elementos satisfaz (g1 · g2 ) · g3 = g1 · (g2 · g3 ).
No que segue, adotaremos uma notação simplificada para a lei de composição de um
grupo: denotaremos g1 · g2 simplesmente por g1 g2 , quando não houver possibilidade de
confusão com outros tipos de leis de composição.
Um subgrupo de um grupo G é um subconjunto de elementos de G, fechado pela mesma
lei de composição do grupo, contendo a identidade e e satisfazendo às demais propriedades
mencionadas acima. Há dois subgrupos especiais que aparecem imediatamente, quando consideramos um homomorfismo f : G1 → G2 (G1 e G2 sendo grupos): o núcleo e a imagem. O
núcleo (que denotaremos por ker f ) é o conjunto de elementos de G1 tais que, se g ∈ ker f ⊂ G1 ,
f (g) = ē, onde ē é a identidade em G2 . A imagem (que indicaremos por Im f ) é o conjunto
composto por todos os elementos de G2 tais que, se ḡ ∈ Im f , ḡ = f (g), para ao menos um
g ∈ G1 . Vamos mostrar que o núcleo e a imagem são subgrupos (de G1 e G2 , respectivamente):
tomemos dois elementos de ker f , g1 e g2 ; aplicando f ao seu produto,
f (g1 g2 ) = f (g1 ) f (g2 ) = ēē = ē.
Isso mostra que g1 g2 ∈ ker f . Tomemos, agora, g ∈ ker f e e a identidade em G1 . Podemos
escrever
ē = f (g) = f (eg) = f (e) f (g)
= f (e) ē = f (e) ,
o que mostra que e ∈ ker f . Analogamente, se g ∈ ker f , ē = f gg−1 = f (g) f g−1 =
f g−1 , o que mostra que g−1 ∈ ker f . A associatividade em ker f decorre da associatividade
em G1 . Assim, vemos que ker f é um subgrupo de G1 .
179
Sebastião Alves Dias
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
Mostraremos agora que Im f é um subgrupo de G2 : sejam ḡ1 e ḡ2 ∈ Im f . Então, ḡ1 = f (g1 )
e ḡ2 = f (g2 ), para pelo menos dois g1 e g2 ∈ G1 . O produto de ḡ1 e ḡ2 pode, então, ser escrito
como
ḡ1 ḡ2 = f (g1 ) f (g2 ) = f (g1 g2 ) = f (g) ,
com g = g1 g2 . Assim, se ḡ1 e ḡ2 ∈ Im f , ḡ1 ḡ2 ∈ Im f . A identidade pertence a Im f , pois
f (e) = f (ee) = f (e) f (e) .
Multiplicando por (f (e))−1 dos dois lados (lembre-se que G2 é um grupo!),
f (e) = ē,
o que diz que ē ∈ Im f (e, além disso, que é, pelo menos, a imagem da identidade de G1 ). Se ḡ
pertence a Im f , e ḡ = f (g),
f gg−1 = ē = f (g) f g−1
= ḡf g−1
= f g−1 ḡ.
Isso diz que f g−1 = ḡ−1 (a inversa é única, para cada elemento do grupo, tente mostrar!).
A associatividade é novamente decorrente da propriedade similar em G2 , o que estabelece que
Im f é um subgrupo de G2 .
Além disso, ker f é um subgrupo normal de G1 (um subgrupo H de um grupo G é dito
normal se, para cada h ∈ H, ghg−1 ∈ H, para todo g ∈ G). Para ver isso, tomemos um
h ∈ ker f e um g arbitrário em G1 . Vemos que,
f ghg−1 = f (g) f (h) f g−1 = f (g) ēf g−1
= f (g) f g−1 = f gg−1
= f (e) = ē.
Portanto, ghg−1 ∈ ker f para todo g ∈ G.
III.
RELAÇÕES DE EQUIVALÊNCIA E CONJUNTOS QUOCIENTES
Precisaremos, para explorar a relação entre os homomorfismos e os espaços conectados por
eles, do conceito de relação de equivalência: chamamos de relação R num conjunto X, um
180
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
Aplicações de Métodos de ...
subconjunto de X × X ≡ X 2 . Se um ponto (a, b) de X 2 está em R, dizemos que a se relaciona
com b pela relação R, ou ainda aRb. Um exemplo de relação é o subconjunto de R2
R = {(a, b) |a e b ∈ R e a < b} .
A relação entre a e b é denotada, nesse caso, como a < b. Uma relação é dita de equivalência
se satisfaz às seguintes propriedades
1. (a, a) sempre pertence a R, para todo a ∈ X;
2. Se (a, b) ∈ R, (b, a) ∈ R;
3. Se (a, b) ∈ R e (b, c) ∈ R, então (a, c) ∈ R.
Uma relação de equivalência (observe que o exemplo citado não satisfaz os requisitos acima)
é usualmente denotada pelo sı́mbolo “∼”. Assim, se (a, b) pertence à relação, escrevemos a ∼ b
e lemos “a é equivalente a b”. Como exemplo, tomemos o conjunto X = {a, b, c}. É simples
ver que R = {(a, a) , (b, b) , (c, c) , (a, b) , (b, a)} é uma relação de equivalência sobre X.
A existência de uma relação de equivalência num conjunto X faz com que ele se particione
naturalmente em subconjuntos onde, em cada um, todos os elementos são equivalentes uns aos
outros. Estes subconjuntos são chamados de classes de equivalência. A classe de equivalência
de um elemento a é denotada por [a]. O elemento a usado para denotar a classe de equivalência
[a] (poderia ser qualquer elemento equivalente a a) é chamado de representativo da classe. No
exemplo dado acima temos duas classes de equivalência, [a] e [c]. Mostramos muito facilmente
que:
1. As classes de equivalência são disjuntas ou coincidem (se duas classes têm interseção
não nula, não pode haver elemento de uma que não pertença também à outra): de fato,
suponha que a ∈ [a1 ] e a ∈ [a2 ] e que b ∈ [a1 ] e b ∈
/ [a2 ]. Então a ∼ a1 , o que implica
em a1 ∼ a. Como a ∼ a2 , pela terceira propriedade, a1 ∼ a2 e, então, [a1 ] = [a2 ]. Logo,
b ∈ [a2 ], o que contraria a hipótese;
2. Todo elemento de X está em uma e apenas uma classe de equivalência: como, para todo
a ∈ X, a ∼ a, vemos que a ∈ [a]. Se ele pertencer a outra classe, ela coincidirá com [a],
pelo que foi mostrado no ı́tem anterior.
181
Sebastião Alves Dias
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
O conjunto formado por todas as classes de equivalência é chamado conjunto quociente de
X pela relação R (ou espaço quociente, ou grupo quociente, dependendo da estrutura que ele
acomodar) e é denotado como X/ ∼.
Teremos bastante interesse num tipo especı́fico de relação de equivalência, imposto sobre
conjuntos que possuam a estrutura de grupo. Dado um subgrupo H ⊂ G, podemos estabelecer
a seguinte relação de equivalência em G: diremos que g1 ∼ g2 se g1 = g2 h, onde h ∈ H
(mostre você mesmo que esta é uma relação de equivalência!). A classe de equivalência de g
é usualmente denotada por [g] ≡ gH, e é chamada de classe lateral à esquerda (em inglês,
left coset). O conjunto quociente do grupo G por esta relação de equivalência é chamado
G/ ∼≡ G/H. Um método sistemático para montar as classes de equivalência de G/H consiste
em fixar um elemento g e multiplicá-lo por todos os elementos de H. É preciso, contudo, checar
se as outras classes de equivalência encontradas assim não são redundantes.
Em geral G/H não possui estrutura de grupo, exceto na circunstância em que H é um
subgrupo normal. Pode-se mostrar isto, a partir de uma proposta de lei de composição no
conjunto quociente da seguinte forma
(g1 H) (g2 H) := (g1 g2 ) H.
Com a lei de composição acima, é fácil mostrar que G/H é um grupo. Contudo, quando
tratamos com classes de equivalência, devemos mostrar que a lei de composição é válida independente do representativo, para obter consistência em nossas afirmações. Tomemos ḡ1 como
representativo de g1 H e ḡ2 representando g2 H. Será que (ḡ1 H) (ḡ2 H) = (g1 g2 ) H? Para isto,
devemos mostrar que (g1 g2 ) H = (ḡ1 ḡ2 ) H, ou seja, devemos encontrar um h ∈ H tal que
ḡ1 ḡ2 = g1 g2 h.
Mas, ḡ1 = g1 h1 e ḡ2 = g2 h2 , com h1 e h2 ∈ H. Assim,
ḡ1 ḡ2 = g1 h1 g2 h2
= g1 h1 g2 h2 g2−1 g2 .
Como o subgrupo H é normal, g2 h2 g2−1 = h3 ∈ H. Prosseguindo na mesma linha,
g1 h1 h3 g2 = g1 h4 g2
= g1 g2 g2−1 h4 g2
= g1 g2 h5 ,
182
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
Aplicações de Métodos de ...
onde usamos que H é um subgrupo para que h4 = h1 h3 ∈ H e o fato de H ser normal para
definir h5 = g2−1 h4 g2 ∈ H. Mostramos, assim, que
ḡ1 ḡ2 = g1 g2 h5 ,
com h5 = g2−1 h1 g2 h2 , que era o que querı́amos provar. Observe a importância crucial do fato
de H ser subgrupo normal, na demonstração acima. Caso H não fosse normal, a definição de
produto de classes de equivalência seria dependente do representativo e, portanto, não faria
sentido.
Observe ainda que sempre há uma classe de equivalência [h], formada pelos elementos de
H. Quando H é normal, esta classe desempenha o papel de identidade no grupo quociente.
Com isto, estamos prontos para mostrar o teorema fundamental do homomorfismo, que diz
o seguinte: considere dois grupos G1 e G2 e um homomorfismo f : G1 → G2 . Então,
G1 / ker f ∼
= Im f
Para mostrar o teorema, vamos definir um mapeamento φ : G1 / ker f → Im f como
φ ([g]) = f (g). Como todo mapeamento envolvendo classes de equivalência, primeiro devemos nos certificar de que ele seja bem definido, ou seja, independente do representativo. De
fato, os elementos de uma classe [g] diferem entre si por produtos com elementos h ∈ ker f ,
g0 = gh.
Assim
φ
0 g = f g0 = f (gh)
= f (g) f (h) = f (g) ē
= f (g) = φ ([g]) .
Vamos mostrar que φ é um isomorfismo. Para isto, verificamos primeiro que ele é um homomorfismo,
φ ([g1 ] [g2 ]) = φ ([g1 g2 ]) = f (g1 ) f (g2 )
= φ ([g1 ]) φ ([g2 ]) ,
onde, lembramos, pudemos usar a lei de composição bem definida no espaço quociente pelo
fato de ker f ser um subgrupo normal de G1 . Devemos mostrar que φ é injetivo e sobrejetivo
183
Sebastião Alves Dias
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
agora. Suponha que φ [g1 ] = φ [g2 ]. Então f (g1 ) = f (g2 ) e
(f (g1 ))−1 f (g2 ) = f g1−1 f (g2 )
= f g1−1 g2 = ē.
Isso mostra que g1−1 g2 = h ∈ ker f , o que significa que g2 = g1 h, ou seja, [g1 ] = [g2 ]. Logo, φ
é injetivo. Considere agora qualquer elemento ḡ de Im f . Por definição, ḡ = f (g), g ∈ G1 , e
assim, ḡ = φ ([g]). Portanto, φ é sobrejetivo e está provado o teorema.
A.
Exemplos
Vamos dar alguns exemplos, que pretendem ilustrar tanto o conceito de espaço quociente
quanto a aplicação do teorema fundamental do homomorfismo.
1. Em todo grupo G encontramos dois subgrupos naturais: aquele composto apenas pelo
elemento identidade ({e}) e o próprio G. Ambos são subgrupos normais (mostre!).
Consideremos H = {e}. As classes de equivalência neste caso têm apenas um elemento
cada: [g] = {g}. Assim, G/H ∼
= G. Tomando agora H = G, observamos que qualquer g
é equivalente a qualquer g0 :
g = g0 h,
−1
h = g0
g ∈ H = G.
Assim, se todos os elementos de G são equivalentes, há apenas uma classe de equivalência
[g] = [e]. Assim, G/G ∼
= {e}.
2. O conjunto dos inteiros, Z, pode ser considerado um grupo pela operação de adição
usual: a identidade é o número 0, o elemento inverso de um elemento n é o elemento −n
e a associatividade é conseqüencia natural da mesma propriedade para a adição. Como
nm = mn (n + m = m + n), ele é um exemplo do que chamamos de grupo abeliano,
que se define pela comutabilidade de quaisquer dos seus elementos. É claro que todo
subgrupo de um grupo abeliano é imediatamente normal (pois ghg−1 = gg−1 h = h ∈ H
por hipótese). O conjunto 2Z é definido como o subconjunto de Z consistindo dos múltiplos de 2. Ele é um subgrupo (normal) de Z. Vamos calcular Z/2Z. A relação de
equivalência proposta é tal que n e n0 são equivalentes se
n = n0 + 2k.
184
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
Aplicações de Métodos de ...
Os elementos de Z podem ser divididos em dois tipos: elementos do tipo n = 2j e do tipo
n = 2j + 1. Cada elemento do primeiro tipo é equivalente a todos do mesmo tipo pois,
se n = 2j e m = 2k, n − m = 2 (j − k) = 2l. Analogamente, se n = 2j + 1 e m = 2k + 1,
n ∼ m. Contudo, é imediato ver que n = 2j não é equivalente a nenhum m = 2k + 1,
pela relação de equivalência proposta. Temos, assim, duas classes de equivalência, que
podem ser denotadas pelos representativos [0] e [1]. Como antes, a lei de composição
natural no espaço quociente será
[a] + [b] = [a + b] .
Podemos estabelecer explicitamente todas as composições possı́veis, dado o número finito
de elementos do grupo quociente:
[0] + [0] = [0 + 0] = [0] ,
[1] + [0] = [1 + 0] = [1] ,
[1] + [1] = [1 + 1] = [2] = [0] .
Esta lei de composição é caracterı́stica do chamado grupo cı́clico de ordem 2, ou Z2 . A
identidade é a classe [0] (que é a própria inversa) e a inversa da classe [1] também é ela
mesma. Assim, concluı́mos que
Z
= Z2 .
2Z
3. Vamos denotar por Z ⊕ Z o conjunto dos pares {(i, j) |i, j ∈ Z}1 . É claro que Z ⊕ Z
também é um grupo e que existe um subgrupo normal constituı́do pelos pares do tipo
{(0, i) |i ∈ Z} ∼
= Z. Vamos denotá-lo por H. Pretendemos calcular o espaço quociente
Z⊕Z
.
H
Observamos que a relação de equivalência é a seguinte: dois elementos (a1 , b1 ) e (a2 , b2 )
são equivalentes se
(a1 , b1 ) = (a2 , b2 ) + (0, i) ,
1
A notação parece ser um pouco abusiva, pois Z não é um espaço vetorial; o conjunto em questão é, estritamente,
Z2 = Z × Z. Contudo, esta última notação não leva em conta o fato de que cada componente do par ordenado
“herda” a operação de soma do seu Z correspondente
(i, j) + (k, l) = (i + k, j + l) ,
com o que os pares ordenados exibem o mesmo comportamento de vetores que pertencem a uma soma direta
de espaços vetoriais. Assim, a notação Z ⊕ Z parece ser a mais adequada, por evidenciar esta propriedade.
185
Sebastião Alves Dias
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
para algum i ∈ Z. Os elementos equivalentes são, então, do tipo
(a, b1 ) ∼ (a, b2 ) , para todo bi ∈ Z.
Claramente, (a, b1 ) não é equivalente a (a0 , b1 ) ou a (a0 , b2 ), se a 6= a0 . As classes de
equivalência podem ser descritas, então, como:
[a] = {(a, b) |a ∈ Z é fixo e b ∈ Z é qualquer} .
É imediato ver que a seguinte lei de composição pode ser imposta de forma não ambı́gua
(independente do representativo)
[a] + a0 = a + a0 = a0 + [a] .
Também é imediato ver que as classes de equivalência estão em correspondência biunı́voca
com os inteiros. Isto, mais o fato de a lei de composição imitar a lei de composição de
Z, faz com que concluamos que
Z⊕Z ∼
= Z.
H
Observe que, se houvessemos escolhido um outro subgrupo de Z⊕Z, igualmente isomorfo
a Z, não necessariamente terı́amos obtido o mesmo resultado. Considere o subgrupo
H0 = {(0, 2i) |i ∈ Z} = 2Z. Ele é claramente isomorfo a Z. A relação de equivalência
(a1 , b1 ) ∼ (a2 , b2 ) se (a1 , b1 ) = (a2 , b2 ) + (0, 2i) ,
implica na existência de dois tipos de classes de equivalência:
[(a, 0)] = {(a, 2i) |a ∈ Z é fixo e i ∈ Z é qualquer} ,
[(a, 1)] = {(a, 2i + 1) |a ∈ Z é fixo e i ∈ Z é qualquer} .
A lei de composição é
[(a, 0)] + [(b, 0)] = [(a + b, 0)] ,
[(a, 0)] + [(b, 1)] = [(a, 1)] + [(b, 0)] = [(a + b, 1)] ,
[(a, 1)] + [(b, 1)] = [(a + b, 0)] ,
o que nos dá a estrutura abaixo para o espaço quociente
Z⊕Z ∼
= Z ⊕ Z2 .
H0
186
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
Aplicações de Métodos de ...
4. Os três exemplos acima são conseqüencias triviais do teorema fundamental do homomorfismo. No primeiro exemplo, consideramos primeiramente o homomorfismo f : G → G,
f (g) = g (ker f = {e}, Im f = G) e, então, o outro homomorfismo f : G → G, f (g) = e
(ker f = G, Im f = {e}). Para o segundo, o homomorfismo em questão é f : Z → Z2
dado por f (n) = 0, se n = 2j e f (n) = 1 se n = 2j + 1, para algum j ∈ Z. O núcleo
é ker f = 2Z e a imagem é Z2 . No terceiro caso, primeiramente tomamos o homomorfismo f : Z ⊕ Z → Z, dado por f (i, j) = i. Obviamente, ker f = {(0, j) |j ∈ Z} ∼
=He
Im f = Z. Para obter os resultados correspondentes a H0 , o homomorfismo em questão
é f : Z ⊕ Z → Z ⊕ Z2 , dado por
(i, 0) , se j for par,
f (i, j) =
(i, 1) , se j for ı́mpar.
O núcleo de f é H0 e a imagem é Z ⊕ Z2 , o que mostra o resultado anterior.
IV.
HOMOTOPIA
A existência de “buracos” num espaço é uma propriedade topologicamente invariante, ou
seja, que não muda quando consideramos espaços que podem ser deformados continuamente
no espaço em questão. Diversos meios de buscar invariantes topológicos partem da mesma
idéia fundamental, que é a detecção desses buracos. Podemos citar os grupos de homologia
e de homotopia como algumas das técnicas mais conhecidas para isso. Nas próximas duas
subseções, vamos estudar os grupos de homotopia. Eles visam classificar mapeamentos de
algum espaço fixo (em geral as esferas S n ) em espaços arbitrários, de acordo com a propriedade
deles serem continuamente deformáveis uns nos outros ou não. Essa “deformabilidade” vai
depender fortemente das propriedades topológicas do espaço “alvo” (ou seja, aquele no qual
chega o mapeamento) e tem, portanto, potencial para nos fornecer caracterizações desse espaço.
Vamos iniciar definindo o conceito de espaço conexo: será um espaço topológico X que não
possa ser escrito como
X = X1 ∪ X2 ,
com X1 e X2 sendo abertos em X, X1 ∩ X2 = ∅. Um caminho em X (não necessariamente
um espaço conexo) conectando x0 e x1 ∈ X, é um mapeamento contı́nuo α : [0, 1] → X, tal
que α (0) = x0 e α (1) = x1 . Um espaço topológico X é dito conexo por arcos, ou conexo
187
Sebastião Alves Dias
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
por caminhos, se dados dois pontos quaisquer do espaço, sempre existir um caminho α unindo
os dois pontos. Todo espaço conexo por arcos é conexo, mas não necessariamente um espaço
conexo é conexo por arcos (veja exemplo no livro de Nash e Sen, citado na bibliografia). Um
laço é um caminho para o qual coincidem os pontos inicial e final (que será chamado de ponto
de base).
É possı́vel propor o conceito de produto de caminhos (ou laços). Dados dois caminhos α e
β, nos quais α (1) = β (0), definimos o caminho produto dos dois como
α (2t)
0 ≤ t ≤ 1/2,
α ∗ β (t) =
β (2t − 1)
1/2 ≤ t ≤ 1.
A definição acima satisfaz à condição de que α ∗ β seja um mapeamento contı́nuo entre [0, 1]
e X, sendo, assim, também ele um caminho. Intuitivamente, imaginando que temos o mesmo
“tempo” (1 segundo) para percorrer os dois caminhos, temos que percorrê-los no dobro da
“velocidade” cada um. A subtração de “−1” em β (2t − 1) assegura que o caminho β comece
a ser percorrido desde o seu inı́cio, β (0). O caminho resultante é tal que seu ponto de origem
é α (0) e seu ponto de destino é β (1). O produto de laços é definido de modo análogo, a partir
da exigência de que seus pontos de base coincidam, α (0) = α (1) = β (0) = β (1).
Poderı́amos perguntar se não seria possı́vel dar uma estrutura de grupo para o conjunto
dos laços (para os caminhos seria mais complexo, devido aos seus pontos iniciais e finais não
coincidirem). O laço (ou caminho) inverso a α (t) pode ser definido com α−1 (t) = α (1 − t) (é
α (t) “percorrido” no sentido inverso). O laço constante é c (t) = x0 , 0 ≤ t ≤ 1. Entretanto,
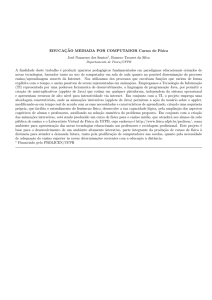
embora o laço α ∗α−1 (t) 6= c (t), ele pode ser continuamente deformado em c (t), como ilustra a
figura 1. Isto sugere que a estrutura de grupo possa ser buscada não entre os laços propriamente
ditos, mas entre as classes de equivalência de laços relacionados por deformações contı́nuas.
Para implementar essa idéia, vamos definir o conceito de homotopia: dados dois laços α e β
em x0 eles são ditos homotópicos (e tal fato é indicado por α ∼ β) se existe um mapeamento
contı́nuo F : I × I → X, onde I = [0, 1], tal que
F (0, t) = α (t) ,
F (1, t) = β (t) ,
F (s, 0) = F (s, 1) = x0 ,
0 ≤ s ≤ 1.
Mostraremos, agora, que a relação entre dois laços α e β que se dá quando α é homotópico a β
(ou seja, existe uma homotopia conectando α e β) é uma relação de equivalência. F (s, t) = α (t)
188
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
Aplicações de Métodos de ...
Fig. 1: Deformação contı́nua da curva α ∗ α−1 (t) na curva c (t): numa primeira etapa, ela é deformada
em α ∗ β −1 (t); em seguida, em δ ∗ γ −1 (t), onde as duas curvas unem x0 e x1 . Esta última curva é
homotópica a σ (t), a qual, por sua vez é homotópica ao laço constante. Supomos que a α ∗ α−1 (t)
curcunda um buraco (indicado na figura), para demonstrar a generalidade do argumento.
é uma homotopia entre α e α. Se F (s, t) é uma homotopia entre α e β, G (s, t) = F (1 − s, t)
é uma homotopia entre β e α. Finalmente, seja F (s, t) uma homotopia entre α e β e G (s, t)
uma homotopia entre β e γ. A homotopia entre α e γ é facilmente construı́da como
F (2s, t) ,
0 ≤ s ≤ 1/2,
H (s, t) =
G (2s − 1, t) ,
1/2 ≤ s ≤ 1.
Vamos verificar que H (s, t) é, de fato, uma homotopia entre α e γ: H (0, t) = F (0, t) = α (t);
189
Sebastião Alves Dias
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
H (1, t) = G (1, t) = γ (t). Além disso,
F (2s, 0) = x0 ,
H (s, 0) =
G (2s − 1, 0) = x ,
0
177-195, 2006
0 ≤ s ≤ 1/2,
1/2 ≤ s ≤ 1.
0 ≤ s ≤ 1,
= x0 ,
com um cálculo similar sendo feito para H (s, 1).
Naturalmente, o próximo passo será impor um produto no espaço quociente, gerado pela
relação de homotopia. A proposta mais óbvia, baseada nas nossas considerações anteriores, é
[α] ∗ [β] = [α ∗ β] .
Contudo, antes de verificar se, com esta lei de composição, o espaço quociente se torna um
grupo, devemos garantir a independência em relação ao representativo, como mencionamos na
primeira aula. Se tomarmos outros laços representando as classes, α0 e β 0 , a independência do
representativo estaria garantida se
α0 ∗ β 0 = [α ∗ β] .
Devemos, então, mostrar que α0 ∗ β 0 é homotópico a α ∗ β. Suponha que A (s, t) seja uma
homotopia entre α e α0 , e B (s, t), uma homotopia entre β e β 0 . Veremos que
F (s, 2t) ,
0 ≤ t ≤ 1/2,
C (s, t) =
G (s, 2t − 1) ,
1/2 ≤ t ≤ 1,
é uma homotopia entre α ∗ β e α0 ∗ β 0 . De fato,
A (0, t) ,
C (0, t) =
B (0, 2t − 1) ,
α (t) ,
=
β (2t − 1) ,
0 ≤ t ≤ 1/2,
1/2 ≤ t ≤ 1,
0 ≤ t ≤ 1/2,
1/2 ≤ t ≤ 1,
= α ∗ β (t) .
Além disso,
C (1, t) =
=
A (1, t) ,
B (1, 2t − 1) ,
α0 (t) ,
β 0 (2t − 1) ,
= α0 ∗ β 0 (t) ,
190
0 ≤ t ≤ 1/2,
1/2 ≤ t ≤ 1,
0 ≤ t ≤ 1/2,
1/2 ≤ t ≤ 1,
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
Aplicações de Métodos de ...
e, C (s, 0) = A (s, 0) = x0 e C (s, 1) = B (s, 1) = x0 . Daı́, [α0 ∗ β 0 ] = [α ∗ β], e o produto
de classes de equivalência está bem definido. Este produto induz uma estrutura de grupo no
espaço quociente. Para ver isso, vamos verificar que as propriedades usuais que caracterizam
um grupo estão satisfeitas. A candidata natural para identidade é a classe de equivalência do
laço constante. Para isso ocorrer, temos que mostrar que
[α ∗ c] = [c ∗ α] = [α] .
A homotopia entre α ∗ c e α é
α (2t/ (1 + s)) ,
F (s, t) =
x ,
0
enquanto a homotopia entre c ∗ α e α é
x0 ,
F (s, t) =
α ((2t − 1 + s) / (1 + s)) ,
0 ≤ t ≤ (1 + s) /2
,
(1 + s) /2 ≤ t ≤ 1
0 ≤ t ≤ (1 − s) /2
.
(1 − s) /2 ≤ t ≤ 1
Assim, vemos que [c] faz o papel de identidade no candidato a grupo. A homotopia
α (2t (1 − s)) ,
0 ≤ t ≤ 1/2
F (s, t) =
α (2 (1 − t) (1 − s)) , 1/2 ≤ t ≤ 1
interpola entre α ∗ α−1 e c. Daı́, α ∗ α−1 = [c], e pode-se mostrar, analogamente, que
−1
α ∗ α = [c], o que seleciona o elemento inverso como sendo [α]−1 = α−1 . A associatividade
segue do fato de que
F (s, t) =
α (4t/ (1 + s)) ,
0 ≤ t ≤ (1 + s) /4
β (4t − s − 1) ,
γ ((4t − s − 2) / (2 − t)) ,
(1 + s) /4 ≤ t ≤ (2 + s) /4
(2 + s) /4 ≤ t ≤ 1
é uma homotopia entre (α ∗ β) ∗ γ e α ∗ (β ∗ γ). Com isso, está mostrado que o espaço das
classes de equivalência por homotopia é um grupo, que recebe o nome de grupo fundamental
(ou primeiro grupo de homotopia) de X no ponto x0 , e é indicado por π1 (X, x0 ).
Tal como foi exposto, pareceria, numa primeira vista, que o grupo fundamental teria que
ser calculado em cada ponto do espaço X. Isso não é verdade. Tomemos um laço α que tenha
x0 como ponto base, um outro laço β que seja baseado em x1 e um caminho γ saindo de x0 e
chegando em x1 . Usando γ e γ −1 , observamos que o laço γ −1 ∗ α ∗ γ está baseado em x1 , assim
191
Sebastião Alves Dias
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
Fig. 2: Correspondência entre laços baseados em x0 e em x1 . O caminho γ sai de x0 e chega em x1 .
como γ ∗ β ∗ γ −1 é um laço baseado em x0 . Assim, se o espaço é conectado por arcos, a cada
laço em x0 pode ser associado um laço em x1 e vice versa (figura 2).
Com isto, podemos propor o seguinte mapeamento entre π1 (X, x0 ) e π1 (X, x1 ): se [α] é um
elemento de π1 (X, x0 ),
σγ ([α]) = γ −1 ∗ α ∗ γ .
Da mesma forma, se β é um laço em x1 , pertencente à classe [β] ∈ π1 (X, x1 ), existe outro
mapeamento entre π1 (X, x1 ) e π1 (X, x0 ):
σγ −1 ([β]) = γ ∗ β ∗ γ −1 .
Vamos mostrar que ambos são homomorfismos e que um é o inverso do outro, o que mostra
que σγ é, na verdade, um isomorfismo entre π1 (X, x0 ) e π1 (X, x1 ). Para isso, precisamos de
um resultado auxiliar: vamos ver que o laço γ ∗ γ −1 em x0 é homotópico ao loop constante.
192
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
Este laço é escrito explicitamente como
γ (2t) ,
γ ∗ γ −1 (t) =
γ (2 (1 − t)) ,
Aplicações de Métodos de ...
0 ≤ t ≤ 1/2
.
1/2 ≤ t ≤ 1
A seguinte homotopia interpola entre γ ∗ γ −1 e c:
γ (2t (1 − s)) ,
0 ≤ t ≤ 1/2
F (s, t) =
γ (2 (1 − t) (1 − s)) , 1/2 ≤ t ≤ 1
Podemos, agora, ver facilmente que
[α1 ∗ α2 ] = [α1 ] ∗ [α2 ]
= [α1 ] ∗ [c] ∗ [α2 ]
= [α1 ] ∗ γ ∗ γ −1 ∗ [α2 ]
= α1 ∗ γ ∗ γ −1 ∗ α2
(imagine que, por exemplo, α1 circunde um buraco e α2 circunde outro; γ ∗ γ −1 não circunda
buraco nenhum, pois, por definição, vai e volta sobre si mesmo continuamente, o que faz
com que possa ser continuamente contraı́do a um ponto, não contribuindo para a classe de
equivalência). Assim,
σγ ([α1 ∗ α2 ]) = σγ α1 ∗ γ ∗ γ −1 ∗ α2
= γ −1 ∗ α1 ∗ γ ∗ γ −1 ∗ α2 ∗ γ
= γ −1 ∗ α1 ∗ γ ∗ γ −1 ∗ α2 ∗ γ
= σγ ([α1 ]) ∗ σγ ([α2 ]) .
De modo similar, vemos que σγ −1 também é um homomorfismo, mas de π1 (X, x1 ) em π1 (X, x0 ).
Vemos, então que
σγ σγ −1 [α] = σγ γ ∗ α ∗ γ −1
= γ −1 ∗ γ ∗ α ∗ γ −1 ∗ γ
= [α] ,
e
σγ −1 (σγ [β]) = σγ −1 γ −1 ∗ β ∗ γ
= γ ∗ γ −1 ∗ β ∗ γ ∗ γ −1
= [β] .
193
Sebastião Alves Dias
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
Então, σγ e σγ −1 são mapeamentos que satisfazem σγ ◦σγ −1 = idπ1 (X,x0 ) e σγ −1 ◦σγ = idπ1 (X,x1 ) .
Então, σγ −1 é a inversa de σγ , e os dois mapeamentos são isomorfismos. Mostramos então que,
se X é conexo por arcos, π1 (X, x0 ) ∼
= π1 (X, x1 ), para quaisquer x0 e x1 ∈ X. Neste caso,
podemos omitir a indicação do ponto x0 na notação do grupo fundamental, para escrever
simplesmente π1 (X).
Pode-se mostrar que o grupo fundamental é um invariante topológico (ou seja, uma quantidade que não se altera para espaços conectados por homeomorfismos). Neste fato reside a sua
maior importância: ele pode ser usado como critério para distinguir globalmente entre espaços
topológicos.
V.
UMA NOTA BREVE SOBRE VARIEDADES DIFERENCIÁVEIS
As técnicas estudadas até agora, nestas notas, encontram grande aplicação na abordagem
de espaços chamados de variedades diferenciáveis. Uma variedade diferenciável é um espaço
que localmente (ou seja, apenas numa parte) se parece com Rn e onde, portanto, podemos
fazer cálculo diferencial e integral. Estas partes podem ser “costuradas” matematicamente
(através de identificações feitas com funções de transição) de modo a formar um espaço com
caracterı́sticas topológicas mais complexas do que as de cada um de seus pedaços isolados. Por
exemplo, imagine os gomos individuais de uma bola de futebol. Cada um deles é um pedaço
de couro plano e, portanto, tem as mesmas propriedades topológicas de um pedaço de R2 . Em
particular, pode se imaginar uma deformação contı́nua destes pedaços num ponto. No entanto,
após termos terminado de costurar todos uns nos outros, de modo a formar a bola, não é mais
possı́vel deformá-los conjuntamente em um ponto.
Em espaços como as variedades diferenciáveis não é imediato definir campos vetoriais (como
fazemos a todo momento em Rn ) e integrar. A estratégia para fazer isto é definir vetores e
formas diferenciais (que virão a ser os análogos dos elementos de integração) a partir das
imagens em Rn de curvas sobre a variedade. Como em Rn temos definições sólidas para
diferenciação e integração, estas definições induzem localmente suas similares para as variedades. Mesmo assim, novos conceitos devem ser criados, como o conceito de transporte paralelo
de um vetor e conexão, que possam permitir comparar vetores e formas diferenciais em pontos
distintos da variedade.
As variedades diferenciáveis tornaram-se profundamente importantes para a Fı́sica no inı́cio
194
CADERNO DE FÍSICA DA UEFS 04, (01 e 02):
177-195, 2006
Aplicações de Métodos de ...
do século XX, quando Einstein desenvolveu a Teoria da Relatividade Geral. A conseqüência
básica desta teoria é o fato de que a distribuição de matéria numa região do espaço modificava as suas propriedades geométricas e topológicas. A mais elementar delas é a de que
não se pode mais, necessariamente, medir as distâncias da forma como sempre se mediu, nos
espaços Euclideanos (como o R3 ). Novas maneiras, generalizadas, de medir distâncias devem
ser consideradas, o que nos conduz a espaços Riemannianos. Estes espaços têm a estrutura de
variedades diferenciáveis e nos levam a considerar as suas propriedades em detalhe. Atualmente
as variedades desempenham papel fundamental na descrição teórica de todas as interações fundamentais, sem contar suas aplicações em outros ramos da Fı́sica.
VI.
AGRADECIMENTOS
Gostaria de expressar os mais profundos agradecimentos aos meus amigos, professores da
UEFS, Antônio Vieira de Andrade Neto, Franz Peter Alves Farias, Germano Pinto Guedes e
Milton Souza Ribeiro, pelo convite para falar sobre métodos matemáticos e suas aplicações à
Fı́sica, pela acolhida e pelo ambiente extremamente estimulante propiciado por eles, durante a
IX semana de Fı́sica da UEFS. E também ao meu amigo, professor da UFRJ, Carlos Farina de
Souza, igualmente convidado para o evento, que me estimulou imensamente na redação destas
notas e de quem assisti aulas brilhantes sobre o papel do vetor de Runge-Lenz nos problemas
de forças centrais, durante a mesma semana de Fı́sica. A todos vocês, muito obrigado!
[1] M. Nakahara, Geometry, Topology and Physics, IOP, 1990, Bristol.
[2] C. Nash e S. Sen, Topology and Geometry for Physicists, Academic Press, 1983, Londres.
[3] E. Lages Lima, Elementos de Topologia Geral, Ao Livro Técnico, 1970, Rio de Janeiro.
SOBRE O AUTOR Sebastião Alves Dias - Doutor em Fı́sica pelo CBPF, é Pesquisador Adjunto B II do Centro
Brasileiro de Pesquisas Fı́sicas.
e-mail: [email protected]
195






![(1) Uma matriz quadrada a = [a ij] chama](http://s1.studylibpt.com/store/data/004155029_1-4a0884fd96fcc2f78c277e56f6caed3a-300x300.png)
