1
CURSO DE ENGENHARIA
BR 110 - km 47 Bairro Pres. Costa e Silva CEP 59625-900 -Mossoró - Rio
Grande do Norte.
Físico - Prof. Valter Bezerra Dantas - E-mail- [email protected]
http://www2.ufersa.edu.br/portal/professor/valterbezerra
Apostila de mecânica 1
Mecânica vetorial aplicada com texto e ilustração e modelos de exercícios, lista de
exercício para cada capitulo.
Conteúdo
Apresentação da disciplina
o Objetivos
Introdução à Estática
o Conceitos básicos
o Princípios fundamentais
o Acões nas estruturas
o Sistema de unidades
Sistemas de vetores
o
o
o
o
o
o
o
o
o
o
o
Grandezas
Classificação dos vetores
Operações vetoriais básicas
Decomposição de um vetor em direções concorrentes
Exemplos de operações vetoriais
Componentes Cartesianas de um vetor no plano
Componentes Cartesianas de um vetor no espaço
Vetor definido pela sua intensidade e por dois pontos da sua linha de ação
Exemplos de aplicação
Produto interno ou produto escalar
Exemplo de utilização
Produto vetorial a dois vetores ou produto externo
Produto vetorial a dois vetores
Momento de uma força em relação a um ponto
Exemplos de cálculo de momento de uma força em relação a um ponto
Produto misto a três vetores
Momento de uma força em relação a um eixo
Momento de uma força em relação aos eixos coordenados
Exemplos de cálculo de momento de uma força em relação a um eixo
Momento de binário
Binários equivalentes
Exemplos de operações com binários
Redução de um sistema de forças
Redução de um sistema de forças num dado ponto
Variação dos elementos de redução relativamente a mudança do ponto de redução
Sistemas de vetores equivalentes
o
Invariantes de um sistema de forças relativamente ao ponto de redução
Casos de redução de um sistema de forças
Exemplos de redução
Eixo central de um sistema de forças
Equação vetorial do eixo central
Equação analítica do eixo central
Propriedade do mínimo dos pontos do eixo central
Casos de sistemas de forças equivalentes a dois vetares
2
Valter Bezerra Dantas
o
Casos particulares de sistemas de forças equivalentes a uma única força resultante
Generalização do teorema de Varignon para sistemas de vetores equivalentes a um vetor
único
Sistemas de forças concorrentes num ponto
Sistemas de forças complanares
Sistemas de forças paralelas
Sistemas de vetores distribuídos
Estática da Partícula
o Equilíbrio da partícula
Metodologia de resolução dos problemas
Exemplos de equilíbrio da partícula no plano
Exemplos de equilíbrio da partícula no espaço
Estática do Corpo Rígido
o Equilíbrio do corpo rígido
o Graus de liberdade. Apoios. Estatia
Graus de liberdade
Tipos de apoios
Distribuição das ligações. Estatia
Metodologia de resolução dos problemas
Exemplos de equilíbrio do corpo rígido no plano
Exemplos de equilíbrio do corpo rígido no espaço
Objetivo
O objetivo da disciplina da Estática consiste em desenvolver a capacidade para analisar qualquer problema
de um modo simples aplicando princípios básicos para sua resolução.
A Mecânica descreve e prevê as condições de repouso ou movimento de corpos sob ação das forças, sendo a
disciplina base das Ciências de Engenharia.
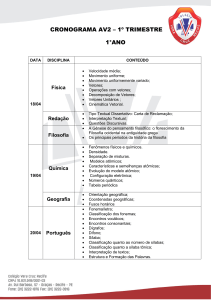
A Mecânica Clássica apresenta dois ramos básicos, que são a Mecânica Teórica, ou a Mecânica dos Corpos
Rígidos e a Mecânica dos Meios Contínuos ou a Mecânica dos Corpos Deformáveis. Esta, por sua vez,
subdivide-se na Mecânica dos Sólidos e na Mecânica dos Fluidos.
A Mecânica dos Corpos Rígidos subdivide-se em Estática e Dinâmica. A Mecânica dos Sólidos contem
várias disciplinas entre os quais Estabilidade das Estruturas, Resistência dos Materiais, Teoria da
Elasticidade, etc.
Figura 1.1: Hierarquias no contexto da Mecânica Clássica
3
Valter Bezerra Dantas
Resumindo, pode afirmar-se simplificadamente que, através da Mecânica Teórica se obtêm soluções
matemáticas para problemas em que os corpos são considerados rígidos. Quando a deformabilidade dos
corpos é tomada em conta, a Teoria da Elasticidade fornece soluções matemáticas para geometrias
relativamente complexas e comportamento material o mais simples possível. A Resistência dos Materiais
fornece soluções físicas para problemas com geometria simples, mas pode lidar com materiais de
comportamento mais complexo. Estas duas ciências completam-se.
Introdução à Estática
Conceitos básicos
Na Mecânica são utilizados quatro conceitos básicos dos quais três aceites sem ser definidos: espaço, tempo,
massa e força (definida). (Mecânica Newtoniana)
Espaço: considera-se tridimensional associada a posição de um ponto num referencial com três
direções, homogênea, isótropo, continuo e absoluto. Unidade - unidade de comprimento em SI - M
Tempo: caracteriza a sucessão e duração de um acontecimento, e é independente das propriedades de
corpo, é absoluto, universal, uniforme e irreversível. Unidade - em SI - S
Massa: caracteriza e compara corpos com base em certas experiências - ex. atração pela Terra de
corpos de massa igual - massa gravítica ou dois corpos que oferecem a mesma resistência à mudança
ao seu movimento - massa de inércia. A massa independente e absoluta. Unidade - em SI - Kg. Na
Mecânica clássica são aceites duas representações para distribuição da massa:
o Discreta - um conjunto finito de massas (partículas)
o Contínua - divisões infinitas ocupando o espaço.
Força: usada para caracterizar a ação de um corpo sobre outro por contacto debito ou atração. A
força depende de espaço, tempo e massa. Unidade - em SI KgMs-2
Princípios fundamentais
Definições
Partícula: uma quantidade muito pequena de matéria que ocupa um único ponto no espaço.
Corpo rígido: combinação de um grande numero de partículas que ocupam posições fixas umas em
relação aos outras
Princípios
1. Regra do paralelogramo: para adição das forças - duas forças que atuam numa partícula podem ser
substituídas por uma única força resultante.
2. Princípio de transmissibilidade: estabelece que as condições de equilíbrio ou de movimento de um
corpo rígido permanecerão inalteradas se uma força atuando num dado ponto do corpo rígido for
substituída por uma força com a mesma intensidade, mesma direção e mesmo sentido, mas atuando
num outro ponto desde que as duas forças têm a mesma linha de ação.
3. As três leis fundamentais de Newton:
1. 1º a lei de Newton: se a resultante das forças que atuam numa partícula é nula a partícula
permanece em repouso ou move-se com velocidade constante segundo uma reta.
2. 2ºa lei de Newton: se a resultante das forças que atuam numa partícula NÃO é nula, esta terá
uma aceleração cuja intensidade é proporcional a resultante e tem o mesmo sentido: F=M x
a.
3. 3ºa lei de Newton: as forças de ação e reação entre corpos em contacto têm a mesma
intensidade e a mesma linha de ação e sentidos opostos.
4
Valter Bezerra Dantas
4. Lei da gravitação de Newton: duas partículas de massa M e m se atraem entre si com forças de igual
intensidade e sentidos opostos. F=G m/r2 onde r representa a distância entre as partículas e G a
constante gravítica.
No caso da atração da Terra F=Peso, M representa o peso da Terra e r = Raio da Terra.
Para o estudo das várias Partes da Mecânica: Estática do Corpo Rígido: usam-se Dinâmica da partícula.
Ações nas estruturas
As ações mecânicas exercidas sobre os sistemas materiais representam-se por forças atuantes e forças de
ligação.
Forças: ações caracterizadas por intensidade, direção e sentido geometricamente representado por
uma reta orientada (vetor) - forças ativas.
Ligações: ações resultantes das restrições geométricas e que obrigam que parte do Corpo Rígido
ocupe posições fixas no espaço. Cada ligação tem como correspondente um força equivalente forças passivas.
Modelação, esquematização das ações.
A determinação das ações o tipo e a grandeza e muito importante e é regulamentada do RSA (Regulamento
de Segurança e Ações para Estruturas de Edifícios e Pontes)
Classificação das ações que solicitam as estruturas:
Quanto à distribuição.
o Força concentrada: ação localizada em superfícies pequenas em relação dimensão do Corpo
Rígido
o Força distribuída
Quanto o modo de variação em tempo:
o Estáticas, cíclicas, dinâmicas, etc.
o Permanentes (peso próprio), variáveis ( pessoas, térmicas, do vento, dos sismos) e de
acidente (explosões)
Valter Bezerra Dantas
5
Sistema de unidades
Utiliza-se o Sistema Internacional desde 1960 que se baseia em três conceitos fundamentais:
comprimento, tempo e massa.
Tabela 2.1: Sistema de Unidades SI: Grandezas Fundamentais e Derivadas
Grandezas Fundamentais
Dimensão
Unidade
Comprimento
L
m
Tempo
T
s
Massa
M
kg
Grandezas Derivadas
Dimensão
Unidade
Superfície
L
m
Volume
L
m
Densidade
ML
kg/m
Velocidade
LT
m/s
Aceleração
LT
m/s
-
rad
Ângulo
Velocidade angular
T
Aceleração angular
T
Força
Pressão
Momento
MLT
ML
T
ML T
rad/s
rad/s
=F
=FL
=FL
kg m/s
= N (Newton)
Pa = N/m
(Pascal)
Nm
6
Grandezas
Algumas grandezas físicas são representadas matematicamente por um escalar, isto é, basta uma quantidade
para defini-las. (Exemplo: massa de um corpo, o seu volume, a sua superfície, etc.)
Outras são grandezas vetoriais que necessitam de três quantidades para serem definidas num espaço
tridimensional. (Exemplo: forças, deslocamentos, velocidades, etc.).
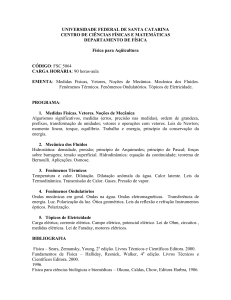
Um vetor é uma entidade matemática definido por intensidade, direção e sentido e geometricamente
representada por uma reta orientada: direção, ponto de aplicação, sentido, e modulo.
Figura 3.1: Representação de um vetor.
A maioria das grandezas mecânicas é representável por vetores e por isto o instrumento matemático se baseia
nas operações vetoriais.
Outras ainda são grandezas físicas tensoriais, que podem ser representadas por nove quantidades num espaço
tridimensional. ( Exemplo: estado de tensão e deformação em torno de um ponto)
Definem-se (num espaço tridimensional):
Escalar: o tensor de ordem 0, com
Vetor: o tensor de primeira ordem, com
Tensor: o tensor de segunda ordem, com
componentes;
componentes;
componentes;
Em geral, num espaço tridimensional, um tensor de ordem n tem 3ncomponentes.
Classificação dos vetores
Os vetores podem ser classificados em:
Vetor aplicado: não pode ser movido sem modificarem as condições do problema. Exemplo - peso
das várias partículas.
Vetor deslizante: o ponto de aplicação pode mover-se ao logo da linha de ação.
Casos particulares de vetores deslizantes:
o Vetores iguais: mesma - intensidade, direção e sentido - pode ser diferente o ponto de
aplicação.
Valter Bezerra Dantas
7
Vetores opostos: mesma - intensidade, direção - sentido oposto - pode ser diferente o ponto de
aplicação.
Figura 3.2: Vetores deslizantes: iguais e opostos.
Vetor livre: podem mover-se livremente no espaço
Os sistemas de vetores podem ser:
Sistema de vetores quaisquer;
Sistema de vetores concorrentes: aplicados num ponto - caso dos vetores atuantes sobre uma partícula ou com
linhas de ação concorrentes;
Sistema de vetores complanares: vetores contidos no mesmo plano;
Sistema de vetores colineares: têm a mesma linha de ação;
Sistema de vetores paralelos: têm as linhas de ação paralelas;
Operações vetoriais básicas
Produto por um escalar:
, onde C pode ser zero, positivo ou negativo. O resultado é um
vetor da mesma direção e ponto de aplicação.
Figura 3.3: Produto de um vetor por um escalar.
Valter Bezerra Dantas
8
Adição de dois vetores (concorrentes):
O resultado é um vetor obtido utilizando a regra do paralelogramo ou regra de triângulo.
Figura 3.4: Adição de vetores - regra de paralelogramo e de triângulo.
Propriedades:
Comutativa
o
Associativa
o
Distributiva em relação aos escalares
Subtração (adição do vetor oposto):
Para adição ou subtração de dois vetores utiliza-se a regra do paralelogramo ou do triângulo - o resultado de
adição de dois vetores é igual a diagonal do paralelogramo construído na base dos vetores.
O resultante dos vários vetores concorrentes é obtido utilizando sucessivamente a regra do paralelogramo ou
do triângulo resultando a regra de polígono:
.
Figura 3.5: Adição de vetores - regra de polígono
Operações não permitidas: adição de um escalar e um vetor, divisão de dois vetores.
Valter Bezerra Dantas
9
Decomposição de um vetor em direções concorrentes
Qualquer vetor pode ser decomposto em duas ou mais componentes desde que tenham o mesmo efeito. A
decomposição de um vetor segundo duas direções concorrentes pode ser feita utilizando a regra do
paralelogramo (triângulo) de forma inversa.
Figura 3.6: Decomposição de um vetor em duas direções concorrentes
Casos:
Conhecem-se as direções de ação dos vetores componentes 3.4.a;
Conhece-se um dos vetores componentes 3.4.b;
As direções de ação dos vetores componentes são perpendiculares.
A utilização da regra do paralelogramo (triângulo) requer o uso de trigonometria (lei dos Senos ou dos
Cosenos) ou a resolução gráfica.
Triângulo:
o
Soma dos ângulos:
o
Lei dos Senos:
o
Lei dos Cosenos:
Caso particular
;
;
Lei da Pitágoras.
Paralelogramo:
o
Soma dos ângulos:
;
10
Exemplos de operações vetoriais
Problema 3.1 Adição de dois vetores:
Resolução:
Graficamente: desenhar a escala, usar a regra de paralelogramo e medir
Resolução trigonométrica:
o
- Lei dos Cosenos:
Β - Lei dos Senos:
Direção do
-
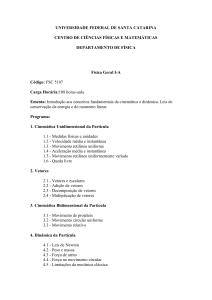
Problema 3.2 Uma jangada é puxada por dois rebocadores. Se a resultante das forças exercidas
pelo rebocador for
dirigida segundo o eixo da jangada, determine:
a) a força de tração instalada em cada uma das cordas, sabendo que
b) o valor de para qual a força de tração instalada na corda 2 é mínima.
Valter Bezerra Dantas
;
11
Resolução trigonométrica
a):
- Lei dos Senos:
b): F será mínimo para o ângulo α=90º-30º=60º, ou seja a reta do menor comprimento entre
o ponto β e a reta 1 é a perpendicular baixado do ponto sobre a direção 1.
Componentes Cartesianas de um vetor no plano
(Um caso particular de decomposição de um vector em duas direções concorrentes corresponde a caso
quando as direções são ortogonais entre si, Figura a). (Esta particularidade simplifica as relações
trigonométricas, sendo o paralelogramo um retângulo e o triângulo um triângulo reto.) Se estas direções
coincidirem com as direções dos eixos coordenados - as componentes correspondem as componentes
Cartesianas, Figura b) e c).
Figura 3.7: Componentes Cartesianas
12
As componentes ax, ay são as componentes Cartesianas, obtidos por projeção do vetor sobre os
eixos do referencial, e podem ser expressas em função de um vetor unitário ou versor do respectivo
eixo.
onde
e
são versores do referencial
(
) segundo os eixos
, respectivamente.
Valter Bezerra Dantas
Componentes Cartesianas de um vetor no espaço
O referencial Cartesiano é um referencial direito - aplica-se a regra do saca-rolha ou da mão direita.
Figura 3.8: Referencial Cartesiano
As componentes do vetor
no espaço seguindo as direções do referencial Cartesiano são:
e
13
Figura 3.9: Componentes Cartesianas
Um vetor no espaço necessita três ângulos para definir a sua direção: θx,θy, θz, e medidos partir da
direção positiva dos eixos.
Onde se verifica a relação: cos2θx+cos2 yθ cos2zθ =1
Se
for o versor do vetor com os
cosenos diretores cos θ x cos θy cos θz, então é possível expressar esse vetor com a ajuda do seu
versor:
O versor do vetor
obtém-se:
14
Vetor definido pela sua intensidade e por dois pontos da sua linha de
ação
O vetor
.
é definido se conhece sua intensidade
e pelo menos dois pontos da sua linha de ação
Figura 3.10: Vetor definido pela intensidade e linha de ação
Se
for o versor do vetor
versor:
O versor do vetor
Então o vetor
será:
obtém-se:
é possível expressar esse vetor com a ajuda do seu
15
Momento de uma força em relação a um eixo
O momento de uma força
em relação a um eixo definido por um versor
, é a projeção do vetor
momento sobre o eixo, obtido em relação a um ponto desse eixo
O momento do vetor em
relação a um eixo representa a tendência que a força impõe para a rotação em torno desse eixo.
Figura 3.14: Momento de uma força em relação a
um eixo
Onde
é um ponto no eixo
de versor
. O momento
é obtido por um produto
misto:
Propriedades: 1. O momento de um vetor em relação a um eixo é nulo sempre que a linha de ação
do vetor e o eixo existam no mesmo plano.
Na prática se recomenda a decomposição da força em duas componentes, uma paralela com
o eixo e a outra perpendicular sobre o eixo, sendo o momento em relação a esse eixo igual
com o momento da componente perpendicular.
Valter Bezerra Dantas
2. O momento do vetor
em relação a um eixo não varia escolhendo qualquer ponto do eixo (ex.
) em relação ao qual é obtido o momento mesmo que o momento em relação a o ponto difere.
16
mas
Operações básicas com vetores utilizando a representação Cartesiana
As operações vetoriais podem escrever-se utilizando a representação Cartesiana:
Exemplos de aplicação
Problema 3.3 Adição de três vetores no plano:
Problema 3.4 Uma força de
com os eixos
Resolução
forma os ângulos de
. Determine as componentes
,
,
e
e
.
, respectivamente
17
Problema 3.5 Determine a direção e o sentido da força:
Resolução:
18
Problema 3.6
Uma placa retangular é suportada por três cabos. Sabendo que a força de tração instalada no cabo
de
, determine as componentes da força exercida na placa em B.
é
Resolução
A força
tem direção
e será decomposta segundo as direções
dos pontos que definem a linha de ação são:
e
Produto interno ou produto escalar
O produto interno a dois vetores dá um escalar e o resultado é obtido:
. As coordenadas
19
Propriedades:
Comutativa:
Distributiva em relação à adição:
Multiplicação por um escalar:
O produto interno é utilizado para determinar as componentes escalares de um vetor segundo uma
direção dada (projeção) e o ângulo entre dois vetores. Exemplo - componentes escalares
Cartesianas.
Vetores base:
Componentes Cartesianas (projeções na direção dos eixos do referencial):
Vetores representados pelas suas componentes Cartesianas
20
Exemplo de utilização
Problema 3.7 Determine a projeção do vetor
sobre a direção
Resolução:
Valter Bezerra Dantas
.
21
Produto interno ou produto escalar
O produto interno a dois vetores dá um escalar e o resultado é obtido:
Propriedades: Comutativa:
Distributiva em relação à adição:
Multiplicação por um escalar:
O produto interno é utilizado para determinar as componentes escalares de um vetor segundo uma
direção dada (projeção) e o ângulo entre dois vetores. Exemplo - componentes escalares
Cartesianas.
Vetores base:
Componentes Cartesianas (projeções na direção dos eixos do referencial):
Exemplo de utilização Vetores representados pelas suas componentes
Cartesianas
Valter Bezerra Dantas
22
Vetores representados pelas suas componentes Cartesianas
Vetores representados pelas suas componentes Cartesianas
Exemplo de utilização
Problema 3.7 Determine a projeção do vetor
Resolução:
sobre a direção
.
23
Produto vetorial a dois vetores ou produto externo
O resultado da operação é um vetor e é obtido por:
Definição:
O vetor tem caráter diferente do vetor que lhe deu origem, isto do vetor
será representada por uma reta orientada com seta dupla.
, o que graficamente
24
Produto vetorial a dois vetores
Os elementos que definem o vetor resultante são:
intensidade (módulo ):
o ângulo
representa o menor ângulo entre os vetores
e
.
dileção: direção perpendicular ao plano formados pelos vetores
sentido: pela regra da saca-rolha ou regra da mão direita.
e
.
Pela regra do saca-rolha o sentido do vetor coincide com o sentido de progressão de uma
saca-rolhas que rodasse acompanhando o movimento de rotação que levaria o primeiro vetor
do produto externo (
) a ir a ter com o segundo vetor (
)
Propriedades:
NÃO é comutativa:
Distributiva em relação à adição:
Multiplicação por um escalar:
O produto vetorial é utilizado para calcular o momento de um vetor em relação a um ponto e
identificar um vetor perpendicular a dois vetores complanares.
Exemplo - vetores base do referencial Cartesiano (referencial direito) Os vetores base do
25
Produto externo expresso em termos de componentes Cartesianas
Seja o vetor
e
expressos em componentes Cartesianas:
O produto externo é:
O produto externo é usado para calcular o momento de um vetor em relação a um ponto.
Se o vetor representa uma força, então o momento é a capacidade de rotação de uma força.
Valter Bezerra Dantas
Momento de uma força em relação a um ponto
O vetor momento é um vetor fixo, pelo que varia com o ponto em relação ao qual se calcula. O
momento de uma força
do ponto representado por
Onde
em relação a um ponto
, é a capacidade de rotação de força em torno
, sendo a unidade
é o vetor posição do ponto de aplicação do vetor
.
relativamente ao ponto
Figura 3.11: Momento de um vetor.
.
26
O vetor momento pode ser obtido através do produto vetorial (Secção 3.6.1), determinando a sua
intensidade, direção e sentido ou utilizando a expressão analítica, produto externo (Secção 3.6.1)
obtendo as componentes segundo os eixos coordenados.
Propriedades:
1. O momento do vetor em relação a um ponto não varia escolhendo qualquer ponto na sua linha
de ação como ponto de aplicação. Pelo princípio de transmissibilidade as forças são vetores
deslizantes pelo que o seu efeito não se altera se a mesma se desloca ao longo da sua linha de ação.
Figura 3.12: Momento de um vetor: princípio de transmissibilidade da força.
Por isso intensidade
do momento
pode ser obtida pela expressão (Secção 3.6.1):
Sendo
perpendicular a linha de ação do vetor (
ao qual se dá o nome de braço da força em relação ao ponto
baixando a perpendicular do ponto
) e o seu módulo
. O braço da força obtém-se
sobre a linha de ação do vetor
.
2. O momento de um vetor em relação a um ponto é nulo sempre que a linha de ação do vetor passe
pelo ponto em causa, sendo os vetores e colineares (
).
3. O momento de um vetor varia escolhendo um outro ponto em relação ao qual se calcula.
O momento relativamente ao ponto
é dado por:
27
Figura 3.13: Variação do momento de uma força em relação a um ponto
Escolhendo um ponto , o momento em relação a esse ponto será:
Como
:
(3.1)
A equação (3.1) representa a propagação dos momentos, com a mudança do ponto
relativamente ao qual se deseja calcular o momento.
Observação: Se o ponto (
relativamente a esse ponto
) for numa linha paralela à linha de ação da força, o momento
( o vetor
e
ficarão paralelas ou colineares).
4. O momento resultante de várias forças concorrentes relativamente a um ponto é igual à soma dos
momentos das várias forças relativamente a esse ponto.
Esta relação que representa a propriedade distributiva é a Teorema de Varignon.
Exemplos de cálculo de momento de uma força em relação a um ponto
Problema 3.8 Sabendo que a força de intensidade
determine o momento em relação ao ponto .
Valter Bezerra Dantas
e com linha de ação
,
28
Resolução:
Em alternativa o momento da força
de posição
, deslizando o vetor
em torno do ponto
ao longo da linha
pode ser calculada utilizando o vetor
com ponto de aplicação em
Problema 3.9 Sabendo que F=150N determine o momento em relação ao ponto
.
.
29
Resolução
1ºo Pelo produto externo
2º Pelo produto vetorial: Observação: No plano é preferível calcular o modulo do
de usar a representação cartesiana.
A direção é perpendicular ao plano
pela definição em vez
e o sentido pela regra de mão direita é:
.
Problema 3.10 Sabe-se que para retirar o prego em é necessário uma força vertical de
Determine
a)
o momento produzido pela força em relação ao ponto
.
b)
a intensidade da força aplicada no ponto , que produz o mesmo momento em relação
ao para
c)
a menor força que produz o mesmo momento
Resolução
a) Momento em relação ao ponto
Pelo produto vetorial:
da força
:
30
Intensidade:
Direção: direção do eixo
Sentido: sentido horário (
b) A intensidade da força
(perpendicular ao plano
)
- pela regra de mão direita).
aplicada no ponto
para
:
1º Pelo produto externo
2º Pelo produto vetorial:
3º Decompor a força
outra perpendicular a
em duas componentes, uma paralela com a direção
(
), sendo:
Aplicando o teorema de Varignon:
(
)e
31
c) A menor força que produz o mesmo momento (ver alinha
), se obtêm no caso em que
, isto é
Momento de uma força em relação aos eixos coordenados
Seja o ponto
externo é:
Seja o vetor
a origem do referencial Cartesiano, o momento da forca
e
expressos pelas suas componentes cartesianas:
O momento em relação aos eixos
,
e
obtém-se:
obtida pelo produto
32
Exemplos de cálculo de momento de uma força em relação a um eixo
Problema 3.11 Determine o momento da força
em torno do eixo
Resolução
Calcula-se o momento
1. Pela definição
2. Pelo produto misto:
da força
:
com
33
Momento de uma força em relação aos eixos coordenados
Seja o ponto
externo é:
Seja o vetor
a origem do referencial Cartesiano, o momento da forca
e
obtida pelo produto
expressos pelas suas componentes cartesianas:
O momento em relação aos eixos
,
e
obtém-se:
Exemplos de cálculo de momento de uma força em relação a um eixo
Problema 3.11 Determine o momento da força
em torno do eixo
34
Resolução
Calcula-se o momento
da força
:
com
1. Pela definição
2. Pelo produto misto:
Valter Bezerra Dantas
35
Momento de binário
Um binário é um sistema constituído por duas forças de igual intensidade, com linhas de ação
paralelas, mas de sentidos opostos. Um binário é representado por uma única grandeza vetorial, o
momento binário. O momento binário é um vetor livre, têm o mesmo elemento
independentemente do ponto do espaço.
Os elementos de binário são:
Plano do binário: - é o plano que contêm as duas linhas de acção;
Sentido: - é o sentido de rotação das duas forças;
Braço : a distância entre as duas linhas de ação;
Intensidade:
O resultante destas forças é nulo.
O momento binário é a tendência de rotação das duas forças:
Com:
Direção: - perpendicular ao plano do binário;
Sentido: - é obtido pela regra de mão direita;
Intensidade:
36
Binários equivalentes
Dois binários com o mesmo momento são equivalentes, isto é produzem o mesmo efeito.
Operações que garantem a equivalência:
Translação no plano do binário ou num plano paralelo;
Rotação no plano do binário em torno de um eixo perpendicular ao plano;
Deformação do binário - modificar o braço ou o modulo das forças mas sem modificar o
momento binário.
Soma dos binários: rege a regra de adição dos vetores (vetores binários).
Exemplos de operações com binários
Problema 3.12 Sabendo que
Resolução Pelo produto externo
, determine o momento do binário.
37
1. Pelo produto vetorial intensidade:
o
o
Direção: perpendicular ao plano
Sentido: horário
Problema 3.13 a) Determine o vetor binário equivalente as forças indicadas.
b) Determine a intensidade de duas forças aplicadas em
e que formam um binário
equivalente.
Resolução
a) Binário equivalente:
1 Pelo produto externo
38
b) Forças em
e
:
Os sentidos dos binários estão representados na figura.
Redução de um sistema de forças
Existem situações em que convêm substituir um sistema de forças - que atuam sobre um corpo
rígido - por outra equivalente (no efeito), às vezes mais simples. Esta operação chama-se redução.
Substituição de uma força aplicada num ponto por um sistema força-binário
que atua num outro ponto
Seja uma força
aplicada no ponto
de um corpo rígido. No ponto
iguais mas de sentidos opostos com linha de ação paralela a da força
de equilíbrio ou movimento.
O par das forças
e
aplicadas nos pontos
e
atuante no ponto
, o que não altera o estado
respectivamente forma um binário de
momento:
, sendo vetor livre pode ser aplicado no ponto
que é ``deslocada'' para esse ponto.
Qualquer força
aplicam-se duas forças
juntamente com o vetor
pode ser ``deslocada'' para um ponto arbitrário
seja acrescentado um binário de momento igual ao momento do
em relação ao ponto
desde que
.
39
No ponto
temos um sistema força-binário.
Redução de um sistema de forças num dado ponto
Definição: Qualquer sistema de forças deslizantes (
equivalentes, atuantes num dado ponto
.
Força resultante:
Momento resultante:
O vetor força resultante
o vetor momento resultante
) pode ser reduzido a uma força e um binário
é um vetor livre pelo que será representada sem índice,
ou
, enquanto
é um vetor aplicado.
O sistema força-binário, equivalente ao sistema de vetores iniciais, forma os elementos de redução
em
:
.
Os elementos de redução podem ser obtidos analiticamente, utilizando a representação dos vetores
pelas suas componentes cartesianas. (Secção 3.4.4, Secção 3.6.1, Secção 3.7 e Secção 3.9).
40
Variação dos elementos de redução relativamente a mudança do ponto
de redução
Força resultante: é um vetor livre pelo que é independente do ponto em relação a qual se reduz o
sistema:
Momento resultante: O momento resultante varia com a variação do ponto em relação a qual se
efetua redução, de acordo com a fórmula de propagação dos momentos (Secção 3.7).
Propriedade projetiva: A projeção do vetor momento
sobre a direção do não depende do
ponto em relação ao qual é obtido o momento, mesmo que o momento em relação a o ponto difere.
41
Pela definição a projeção do vetor
sobre a direção do vetor
é dada pelo:
O vetor
é perpendicular sobre o plano que contêm os vetores
e Sistemas de vetores equivalentes
Dois sistemas de vetores (forças) dizem-se equivalentes quando tiverem os mesmos elementos de
redução num mesmo ponto do espaço. Para que dois sistemas e
ou sejam equivalentes tem de
se verificar as seguintes relações:
Para que um sistema de vetores seja equivalente a zero basta verificar as seguintes relações num
ponto qualquer do espaço:
Nesse caso o sistema
representa um sistema em equilíbrio.
que a projeção desse vetor sobre a direção
é nulo.
Invariantes de um sistema de forças relativamente ao ponto de redução
Invariantes de um sistema são elementos que não variam escolhendo um outro ponto em relação ao
qual se calculam. Os invariantes de um sistema de vetores são:
1. Força resultante: - invariante vetorial. A força resultante de um sistema de vetores
(forças) é um vetor livre, não varia escolhendo qualquer ponto no espaço em relação o qual
se calcula.
2. Produto escalar
- invariante escalar.
42
O produto interno dos vetores
e
não varia escolhendo qualquer ponto no espaço em
relação o qual se calcula o
3. A projeção do vetor
sobre a direção do vetor
:
.
Casos de redução de um sistema de forças
Qualquer sistema de vetores (forças) pode ser reduzido (substituído) a um dos seguintes sistemas de
vetores simples, identificados com base nos primeiros dois invariantes - invariantes principais:
1.
- caso geral - redução a dois vetores não complanares.
2.
- o sistema equivalente a um vetor (força) resultante único
.
3.
- o sistema se reduz a um binário (momento idêntico em qualquer
ponto do espaço). O sistema ainda diz-se equivalente a conjugado.
4.
- elementos de redução nulos. Se um sistema se reduz elementos
nulos é equivalente a zero e será nulo em qualquer ponto do espaço. Um sistema de forças
nestas condições representa um sistema em equilíbrio.
Exemplos de redução
Problema 3.14 a) Substituí a força aplicada por um sistema força-binário aplicados em
b) Determine as duas forças aplicadas em
e que são equivalentes ao momento obtido em
Resolução
a)
.
43
b)
O sentido do binário está representado na figura.
Problema 3.15 Para o sistema representado na figura determine:
a)os elementos de redução em
b) os elementos de redução em
.
Resolução
a)
Expressão analítica das forças:
44
b) Os elementos de redução em
são:
Sendo os vetores
e colineares (
varia se o ponto de redução for o ponto
), o momento resultante do sistema não
.
Eixo central de um sistema de forças
Nos casos de redução para qual
existem pontos no espaço em que os vetores e
são colineares ou paralelas. O lugar geométrico destes pontos corresponde a uma reta que tem a
direção do vetor
e chama-se eixo central do sistema e o momento
Equação vetorial do eixo central
é mínimo.
45
Se conhecermos os elementos de redução num ponto
formula de propagação dos momentos:
pode determinar o momento
pela
ou
(3.2)
Nesta equação a única incógnita é o vetor
que define o eixo central, relativamente ao ponto
A equação se resolve externando da esquerda com o vetor
ambos os lados da equação (3.2):
Aplicando as formulas de Gibbs para resolver o produto externo duplo, resulta o vetor posição do
eixo central:
Os elementos que definem o vetor
são:
Intensidade:
Direção: perpendicular ao plano que contêm os vetores
Sentido: pela regra de mão direita.
A equação vetorial do eixo central é:
e
.
46
Equação analítica do eixo central
Substituindo os vetores expressos pelas suas componentes cartesianas, e efetuando os cálculos
resulta e equação do eixo central como intersecção de dois planos:
As relações representam a equação de dois planos.
Propriedade do mínimo dos pontos do eixo central
A intensidade do momento resultante relativamente aos pontos (
O momento mínimo pode ser obtido internando com o vetor
propagação dos momentos e resulta:
O termo
) do eixo central é mínima.
ambos os lados da equação da
sendo o produto escalar a dois vetores perpendiculares,
, pelo que resulta:
47
Casos de sistemas de forças equivalentes a dois vetores
Seja o ponto
um ponto qualquer no espaço e o ponto um ponto no eixo central. Qualquer
sistema de vetores (forças) pode ser equivalente a um dos seguintes casos representados na
Tabela 3.1.
Tabela 3.1: Casos de redução a dois vetores
a)
em
:(
)
em
: mínimo -
em
:(
em
: força resultante (
I.
- admite EC
b)
)-
a)
Binário (
b)
Elementos nulos (
)
)
II.
) - equilíbrio
Casos particulares de sistemas de forças equivalentes a uma única força
resultante
Para que um sistema se reduza a uma única força resultante é necessário e suficiente que:
ou
Nesse caso a força resultante atua no eixo central.
Os casos de sistemas que de modo geral se reduzem a um vetor único são:
1. Sistemas de forças concorrentes num ponto
(
);
48
2. Sistemas de forças complanares (
ou
);
3. Sistemas de forças paralelas (
ou
).
4. Sistemas de forças distribuídas. (generalização do sistema de forças paralelas)
o
Generalização do teorema de Varignon para sistemas de vetores
equivalentes a um vetor único
Para os casos de sistemas de vetores equivalentes a um vetor único
e
ou
que é
ou
, o momento resultante é igual ao momento da resultante, desde que
seja convenientemente aplicada, nos pontos em que o momento resultante é zero.
Se for um ponto no eixo central, o momento num ponto
é dado pelo:
qualquer no espaço o momento
Sistemas de forças concorrentes num ponto
Se as linhas de ação das todas as forças concorrem no mesmo ponto
uma única força resultante
Se o vetor
que passa por
e coincide com o eixo central.
, o sistema está em equilíbrio.
Para calcular o momento do sistema em qualquer ponto
Varignon.
, o sistema é equivalente a
diferente de
aplica-se o teorema de
49
Equivalência a zero:
.
Sistemas de forças complanares
Se as forças atuarem todas no mesmo plano (
no mesmo plano. Se o ponto
), o sistema se reduz a um vetor único contido
não pertence ao eixo central
.
Se o vetor
, o sistema está em equilíbrio ou reduz a um binário. Caso contrário o sistema
admite eixo central contido no plano das forças.
A equação do eixo central obtém-se aplicando o teorema de Varignon.
Equivalência a zero: Um sistema de forças complanares está em equilíbrio se verificarem uma das
três condições:
1. Têm elementos nulos em relação a um ponto qualquer
no plano das forças (
).
o momento resultante em relação a três pontos (
colineares no plano é nulo:
2.
.
,
,
) não
50
o momento resultante em relação a dois pontos (
um eixo
não perpendicular ao linha
,
) e em relação a
é nulo:
e
. Sistemas de forças paralelas
Se os vetores todos são paralelos com a mesma direção ( ), em que a força resultante
sistema se reduz a um vector único paralela com a mesma direção.
o
Se o vetor
, o sistema está em equilíbrio ou re reduz a um binário. Caso contrário o sistema
admite eixo central. A equação do eixo central obtém-se aplicando o teorema de Varignon.
Equivalência a zero: elementos nulos em relação a um ponto qualquer
no plano das forças (
).
Sistemas de vetores distribuídos
A aplicação de uma carga sobre um corpo em geral faz-se através de certa superfície de contacto e
segundo uma equação. As cargas podem ser distribuídas em superfície (e.g. pressão hidrostática
exercido por um liquido sobre a superfície de um corpo mergulhado nele) ou distribuídas por
volume (e.g. peso dos vários pontos) ou ainda forças distribuídas em linha.
Interesse agora substituir um sistema de forças distribuídas por um outro sistema mais simples sem
alterar o seu efeito.
51
Para calcular os elementos de redução de um sistema de forças distribuídas relativamente a um
ponto, usam-se os procedimentos descritos para a redução de sistemas em caso geral, substituindo a
operação de soma por integrais das cargas elementares atuantes em grandezas elementares.
Casos de distribuição numa superfície
A intensidade da carga elementar
é obtida conhecendo densidade da carga
elementar
sobre qual atua em função das coordenadas do ponto em causa:
Os elementos da redução relativamente ao ponto
e a superfície
qualquer são:
Carga distribuída numa linha
Um caso de maior freqüência é o caso de cargas paralelas distribuídas numa linha.
Os elementos de redução em
são:
A posição do eixo central obtém-se aplicando o teorema de Varignon:
Na Tabela 3.2 apresentam-se alguns exemplos de sistemas de forças paralelas distribuídas em linha.
Tabela 3.2: Exemplos de sistemas de forças paralelas distribuídas: força resultante e posição do
52
eixo central
Sistema
,
,
,
,
Exemplos de redução de sistemas que admitem eixo central
Problema 3.16 Para o sistema representado na figura em que
, determine:
os elementos de redução em
,
e
e
a equação do eixo central.
53
Resolução
a) Expressão analítica das forças:
b) Para a equação do eixo central aplica-se o teorema de Varignon.
A equação do eixo central resulta:
O eixo central intersecta os eixos coordenados
e
de coordenadas
.
e
nos pontos
e
, respectivamente,
Problema 3.17 Substituía o sistema dado por uma única força aplicada num ponto que fica sobre
a linha
. Determine a posição do ponto de aplicação desta força.
54
Resolução
1. Se o ponto
for um ponto de linha
situado a uma distância
2. O ponto pertence ao eixo central,
Varignon para calcular o momento em
é possível aplicar o teorema de
Problema 3.18 Para o sistema representado na figura e
elementos de redução da forma
intersecta as linhas
e
.
, determine os
. Indique os pontos onde a linha da resultante
Valter Bezerra Dantas
Resolução: Os elementos da redução em
do ponto
são:
.
55
Como
o sistema admite eixo central e sendo
resultante atuantes no eixo central. Se o ponto
aplicar o teorema de Varignon.
o sistema se reduz a uma única força
for um ponto no eixo central
, podemos
A equação do eixo central é:
o que intersecta a eixo
intersecção (
no ponto
e o eixo
(linha
) no ponto
. Da equação do eixo central obtêm-se as coordenadas do ponto de
) do eixo central com a linha
,
Estática da Partícula
Alguns problemas reais podem ser resolvidos estudando a partícula, sempre que se verificam as
condições de aplicação do equilíbrio da partícula, isto é as forças atuantes são concorrentes num
ponto.
Conceitos:
Forças concorrentes (forças externas - aplicadas e/ou transmitidas através de cabos, correias,
correntes etc. - forças resultantes de contacto direto entre os corpos e forças resultantes de
interação dos corpos a distância - ex. forças gravíticas);
Equilíbrio estático: - a velocidade de um objeto é igual a zero ou é constante;
1ºa Lei de Newton: - se a resultante das forças que atuam numa partícula é nula - a partícula
permanece em repouso ou move-se com velocidade constate segunda uma reta.
Valter Bezerra Dantas
56
Equilíbrio da partícula
Uma partícula livre está em equilíbrio se o sistema de forças atuantes (externas aplicadas,
gravíticas e reativas) se reduz os elementos nulos.
O sistema de forças corresponde ao caso particular: de sistema de forças cor correntes num ponto
que representa a partícula.
A condição de equilíbrio (vetorial) é:
As condições de equilíbrio podem ser expressas analiticamente:
Espaço:
(4.1)
As equações (4.1) permitem determinar até três incógnitas.
Plano - particularização do caso 3D: sistemas de forças concorrentes coplanares, Seção
).
(4.2)
As equações (4.2) permitem determinar até duas incógnitas.
Na realidade, de modo geral, a partícula não se encontra livre e para resolver os problemas é
necessário substituir as ligações por os seus correspondentes físicos (forças) de modo a obter um
esquema de partícula livre sob acções, chamado diagrama de corpo livre - DCL.
Exemplos de forças transmitidas através de cabos, correias, correntes, etc., sem atrito, molas
ou contacto direto entre corpos:
57
Forças transmitidas através de:
Cabos, correias sem atrito, (Figura e ), sistemas de roldanas sem atrito - podem ser
solicitadas a tração e a força que atua neles é constante (Figura )
Molas: resistem a tração e a compressão e a força é dada pelo
, onde representa
a deformação da mola (Figura )
Superfície lisa (sem atrito): força tem a direção normal a superfícies em contacto (Figura )
Valter Bezerra Dantas