UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
Um sistema para simular o comportamento de bancos
trifásicos de reguladores de tensão usados em sistemas de
distribuição de energia elétrica.
Jânio Mendonça Júnior
Orientador: D.Sc. José Alberto Nicolau de Oliveira
NATAL - RN
MARÇO/2010
JÂNIO MENDONÇA JÚNIOR
Um sistema para simular o comportamento de bancos
trifásicos de reguladores de tensão usados em sistemas de
distribuição de energia elétrica.
Dissertação de mestrado submetida ao programa de Pós-Graduação em Engenharia
Elétrica do Centro de Tecnologia da Universidade Federal do Rio Grande do Norte, em
cumprimento às exigências para obtenção do grau de Mestre em Engenharia Elétrica,
na área de concentração de Sistemas de Energia Elétrica.
Orientador: D.Sc. José Alberto Nicolau de Oliveira
NATAL - RN
MARÇO/2010
JÂNIO MENDONÇA JÚNIOR
Um sistema para simular o comportamento de bancos
trifásicos de reguladores de tensão usados em sistemas de
distribuição de energia elétrica.
Dissertação de mestrado submetida ao programa de Pós-Graduação em Engenharia
Elétrica do Centro de Tecnologia da Universidade Federal do Rio Grande do Norte, em
cumprimento às exigências para obtenção do grau de Mestre em Engenharia Elétrica,
na área de concentração de Sistemas de Energia Elétrica.
Aprovado por:
Prof. D.Sc. Marcos Antonio Dias de Almeida
Prof. D.-Ing. Manoel Firmino de Medeiros Jr.
Prof. D.Sc. José Alberto Nicolau de Oliveira
NATAL - RN
MARÇO/2010
Resumo
A crescente concorrência nos serviços de distribuição de energia elétrica de boa qualidade obriga as concessionárias a investirem em projetos que garantam a sua qualidade.
Manter níveis de tensão em padrões aceitáveis no ponto de entrega da energia elétrica
ao consumidor é um dos principais problemas enfrentados. A utilização de reguladores
de tensão torna-se uma forma viável para garantir a qualidade do serviço na entrega do
produto (energia elétrica), no entanto, a especificação de seus ajustes não se constitue
em tarefa simples, principalmente quando se tem grande variação de carregamentos,
inclusive, desequilíbrios.
Com base nos problemas expostos na utilização de reguladores de tensão, foi desenvolvido um sistema para simular o comportamento de bancos trifásicos de reguladores
de tensão usados em sistemas de distribuição de energia elétrica. Tal simulação será de
grande valor para visualização do comportamento de bancos trifásicos de reguladores de
tensão, antes de sua instalação na rede de distribuição, para definição de parâmetros de
regulação e restrições de regulação, para visualização de valores de ajuste de regulação
e variações de tensão.
Uma característica importante deste simulador é fato deste se comunicar com um
programa TOpReDE (Técnicas de otimização para redes de distribuição de energia elétrica), com intuito de comparar e validar resultados através da geração de gráficos, a
R
partir do Matlab.
R
Nesta implementação foram utilizados os blocos funcionais do Matlab/Simulink
R chamada DSP builder, ambiente no qual
em conjunto com a biblioteca da Altera,
serão feitas simulações e testes do sistema de regulação de tensão.
Palavras-Chave
Parâmetros de sensibilidade, Simulação, Sistemas de distribuição, Reguladores de
Tensão, DSP builder.
i
Sumário
1
Introdução
1
2
As ferramentas utilizadas
5
3
4
2.1
R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MATLAB
5
2.2
Simulink . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.3
Quartus II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
2.4
R DSP builder . . . . . . . . . . . . . . . . . . . . . . . . . .
O Altera
7
2.4.1
Desenvolvimento . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.4.2
Implementação e verificação . . . . . . . . . . . . . . . . . . .
8
2.4.3
Fluxo Automático (com simulink) e Fluxo Manual (sem simulink)
9
Reguladores de tensão
11
3.1
Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
3.2
Reguladores de tensão . . . . . . . . . . . . . . . . . . . . . . . . . .
13
3.2.1
Modelagens do Regulador de Tensão . . . . . . . . . . . . . .
15
3.2.2
Esquemas de ligação de reguladores em circuitos trifásicos . . .
16
3.2.3
Procedimentos atuais de controle dos reguladores de tensão . .
19
O algoritmo de simulação
4.1
4.2
21
Embasamento para o desenvolvimento do simulador do comportamento
de bancos trifásicos de reguladores de tensão . . . . . . . . . . . . . .
21
Desenvolvimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
4.2.1
Diagrama de blocos do simulador monofásico . . . . . . . . . .
23
4.2.2
Diagrama de blocos do simulador trifásico . . . . . . . . . . .
24
4.2.3
O simulador trifásico . . . . . . . . . . . . . . . . . . . . . . .
26
4.2.4
Memória ROM . . . . . . . . . . . . . . . . . . . . . . . . . .
28
ii
5
6
4.2.5
Temporização do modelo . . . . . . . . . . . . . . . . . . . . .
30
4.2.6
A UAT (unidade de ajuste de tensão) . . . . . . . . . . . . . . .
31
4.2.7
A UCT (Unidade de controle de tap) . . . . . . . . . . . . . . .
35
4.2.8
A UCAT (Unidade de cálculo das tensões) . . . . . . . . . . . .
36
Resultados e discussões
39
5.1
Comparação de resultados . . . . . . . . . . . . . . . . . . . . . . . .
39
5.2
Análise gráfica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
5.2.1
Análise gráfica na fase C . . . . . . . . . . . . . . . . . . . . .
41
5.2.2
Análise gráfica na fase B . . . . . . . . . . . . . . . . . . . . .
43
5.2.3
Análise gráfica na fase A . . . . . . . . . . . . . . . . . . . . .
44
Conclusões
47
A A interface do simulador
50
B O formato Intel-HEX
53
B.1 O conteúdo de um registro HEX . . . . . . . . . . . . . . . . . . . . .
53
B.2 Exemplos de registro HEX . . . . . . . . . . . . . . . . . . . . . . . .
54
iii
Lista de Figuras
2.1
Fase de projeto com a biblioteca DSP builder . . . . . . . . . . . . . .
7
2.2
Blocos funcionais disponíveis na biblioteca DSP builder . . . . . . . .
9
2.3
Visão geral do fluxo de projeto utilizando DSP builder . . . . . . . . .
10
3.1
Diagrama unifilar de um trecho de um alimentador. . . . . . . . . . . .
12
3.2
Diagrama unifilar de uma rede de distribuição. . . . . . . . . . . . . . .
14
3.3
Modelos Básicos de autotransformador . . . . . . . . . . . . . . . . . .
14
3.4
Modelo elétrico do conjunto rede de distribuição - regulador . . . . . .
15
3.5
Modelo de referência para um regulador de tensão monofásico . . . . .
16
3.6
Ligação Estrela Aterrada de três reguladores monofásicos em uma rede
de distribuição trifásica. . . . . . . . . . . . . . . . . . . . . . . . . . .
3.7
Ligação Delta de três reguladores monofásicos em uma rede de distribuição trifásica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.8
17
18
Ligação Delta Aberto de três reguladores monofásicos em uma rede de
distribuição trifásica. . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
4.1
Alimentador utilizado em uma das simulações. . . . . . . . . . . . . .
22
4.2
Diagrama de blocos do simulador do regulador monofásico . . . . . . .
24
4.3
Diagrama de blocos do simulador do banco regulador trifásico . . . . .
24
4.4
Modelo do algoritmo de simulação para controle de tensão em um alimentador com regulador trifásico . . . . . . . . . . . . . . . . . . . . .
26
4.5
Memória Rom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
4.6
Temporização do sistema. . . . . . . . . . . . . . . . . . . . . . . . . .
30
4.7
Máquina de estados (MdEcaPerfil) e bloco de configuração. . . . . . . .
31
4.8
Unidade de ajuste de tensão . . . . . . . . . . . . . . . . . . . . . . . .
32
4.9
Temporização na UAT. . . . . . . . . . . . . . . . . . . . . . . . . . .
33
4.10 Máquina de estados (MdE1_2) e bloco de configuração. . . . . . . . . .
34
iv
4.11 Unidade de controle de tap . . . . . . . . . . . . . . . . . . . . . . . .
35
4.12 Unidade de cálculo das tensões . . . . . . . . . . . . . . . . . . . . . .
37
5.1
Gráfico de comparação de tensão com TOpReDE na fase C. . . . . . . .
42
5.2
Gráfico tensão inicial X tensão final na fase C. . . . . . . . . . . . . . .
42
5.3
Gráfico de comparação de tensão com TOpReDE na fase B. . . . . . . .
43
5.4
Gráfico tensão inicial X tensão final na fase B. . . . . . . . . . . . . . .
44
5.5
Gráfico de comparação de tensão com TOpReDE na fase A. . . . . . . .
45
5.6
Gráfico tensão inicial X tensão final na fase A. . . . . . . . . . . . . . .
45
A.1 Simulador do comportamento de bancos trifásicos de reguladores de
tensão. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
51
A.2 Blocos do F1_subsistema. . . . . . . . . . . . . . . . . . . . . . . . .
52
v
Lista de Simbolos
TOpReDE Técnicas de otimização para redes de distribuição de energia elétrica
ASCII American Standard Code for Information Interchange
FPGA
Arranjo de portas programáveis no campo (Field Programable Gate Array)
DSP Processador Digital de Sinais (Digital Signal Processing)
VHDL
Linguagem de descrição de hardware (Hardware Description Language)
VHSIC
Very High Speed Integrated Circuit
FIR Finite Impulse Response
NCO
Numerically Controlled Oscilator
FFT Fast Fourier Transform
IFFT Inverse Fast Fourier Transform
A/D Analógico/Digital
D/A Digital/Analógico
LED Diodo emissor de luz (Light Emitting Diode)
FIFO Primeiro a entrar primeiro a sair (First in first out)
RAM Memória de acesso aleatório (Random Access Memory)
ROM
Memória apenas para leitura (Read Only Memory)
MdE
Máquina de estados
UAT
Unidade de ajuste de tensão
UCT
Unidade de controle de Tap
UCAT Unidade de Cálculo de Tensões
p.u.
por unidade
vi
Lista de Siglas
V1
Tensão complexa no ponto 1
V2
Tensão complexa no ponto 2
x, X
Impedância reativa
r, R
Impedância ativa
Vs
Tensão no secundário do transformador
Zs
Impedância no ramo série do regulador de tensão
Zd
Impedância no ramo em derivação
IL
Corrente de carga
Is
Corrente no ramo série do regulador de tensão
Id
Corrente no ramo em derivação do regulador de tensão
V ref
Vd
Tensão de referência
Tensão no enrolamento
n Número de espiras ou relação de espiras
I∗
S1 , S2
Conjugado da corrente
Potências aparentes complexas de entrada e saída no regulador de tensão
S Potência aparente complexa
I∗s
Corrente conjugada no ramo série do regulador de tensão
VA
Tensão na fase A
VB
Tensão na fase B
VC
Tensão na fase C
V AB
Tensão entre as fases A e B
V BC
Tensão entre as fases B e C
V CA
Tensão entre as fases C e A
Z Impedância equivalente
Vj , Vi
Tensões nos nós j e i
∆fc
Variação de carregamento
∆V i
Variação de tensão no nó i
∆V j
Variação de tensão no nó j
vii
V iest
Tensão de saída estimada no nó regulador i
V iant
Tensão de saída anterior a uma regulação de tensão no nó regulador i
V jant
Tensão de regulação anterior a uma variação de tensão no nó j
V jdes
Tensão de regulação desejada no nó j
V imed
∂Vj
∂Vi
V iat
Tensão medida na saída do nó regulador i
V jSim
Tensão de regulação calculada pelo simulador
V jT
Tensão de regulação calculada pelo TOpReDE
Coeficiente de tensão
Tensão de saída atingida no nó regulador i
viii
Capítulo 1
Introdução
A crescente concorrência nos serviços de distribuição de energia elétrica de boa qualidade, obriga as concessionárias a investirem em projetos que garantam a qualidade no
fornecimento do serviço. Qualidade em energia é portanto um fator de preocupação para
as concessionárias de energia elétrica. Tal preocupação iniciou-se em meados da década
de 80 segundo [11]. Como intervenientes principais nesta qualidade, destacam-se:
−→ a regulação de tensão no ponto de entrega de cada consumidor fora de padrões
estabelecidos. Alguns equipamentos são muito sensíveis a variações de tensão,
como aparelhos que contêm microprocessadores controlados e dispositivos eletrônicos que são sensíveis a qualquer tipo de perturbação;
−→ os cintilamentos (flickers) causados pelas repetitivas e rápidas mudanças de tensão
na rede de distribuição;
−→ o aumento da consciência sobre qualidade de energia pelo consumidor, que vem
se tornando mais interessado em questões como interrupções, variações de tensão,
interrupções freqüentes, e com isso vem cobrando das concessionárias de energia
elétrica melhorias na qualidade e na continuidade da energia entregue.
Para superar alguns destes problemas apresentados, reguladores de tensão e bancos
de capacitores são freqüentemente incorporados às redes de distribuição de energia elétrica [15], [16]. No entanto, a localização destes equipamentos, e em destaque a dos
reguladores de tensão, é fortemente dependente da topologia da rede e até há pouco
tempo, totalmente orientada por exaustivas análises de fluxos de carga, feitas nas unidades de planejamento das concessionárias de energia elétrica, onde são consideradas
1
regras cotidianas previsíveis (dayly) e mudanças sazonais de carregamentos [10]. A
proposta da regulação de tensão em redes de distribuição é manter níveis de tensão dentro de um faixa prescrita de valores, no ponto de entrega dos consumidores [8]. Alguns
avanços nessa área já são notados como a programação dinâmica e algoritmos de controle que implementam lógica fuzzy, utilizados para controle de bancos de capacitores e
transformadores com mudanças de taps [16].
A partir de análises feitas com algoritmos de fluxo de cargas, envolvendo alimentadores reais, constatou-se que uma variação na tensão de saída de um regulador se
reflete, linearmente, para todos os nós, localizados a jusante, para condições fixas de
carga e que, para uma condição fixa de tap do regulador, as tensões nos nós a jusante,
também variam linearmente, para excursões de carregamentos no intervalo usual da
curva de carga diária. Tais observações levaram à conclusão de que é possível controlar
a tensão de regulação de qualquer ponto desejado (local ou remoto) [10].
Outro aspecto bastante importante motivador para o desenvolvimento deste trabalho é a carência de simuladores do comportamento de bancos reguladores trifásicos de
tensão diante da grande necessidade de ensaios e simulações destes importantes equipamentos em redes de distribuição de energia elétrica. Algumas pesquisas foram feitas
e não foi encontrado nenhum sistema de simulação de comportamento dos reguladores
de tensão em redes de distribuição de energia elétrica.
Diante de tais fatos, desenvolveu-se um simulador para avaliar o comportamento de
bancos reguladores trifásico usados em redes de distribuição de energia elétrica. Tal
simulação é de grande valor para caracterizar parâmetros de regulação e restrições de
regulação, para visualizar valores de ajuste de regulação, variações de tensão e simulação de cargas. O simulador foi implementado com base nos coeficientes das funções
que definem a sensibilidade de tensão para cada nó presente em um alimentador.
Uma característica importante deste simulador é fato deste se comunicar com o programa TOpReDE (Técnicas de otimização para redes de distribuição de energia elétrica)1 , com intuito de comparar e validar os resultados através da geração de gráficos a
R
partir do Matlab.
1
Técnicas de Otimização para Redes de Distribuição de Energia Elétrica - desenvolvido pela base de
pesquisa OSEE (Otimização em Sistemas de Energia Elétrica), em 2004 e 2005, durante a execução de um
projeto de Pesquisa e Desenvolvimento proposto pela COSERN. A Base de pesquisa OSEE é composta
por professores e alunos dos cursos de Engenharia Elétrica e de Engenharia da Computação da UFRN.
2
R
Nesta implementação foram utilizados os blocos funcionais do Matlab/Simulink
R
em conjunto com a biblioteca DSP builder da Altera.
Foi também no ambiente
R
Matlab/Simulink
que foram feitas as simulações e os testes do sistema de simulação
R
de regulação de tensão implementado. O desenvolvimento do simulador no Matlab/Simulink,
utilizando-se da biblioteca DSP builder possibilita, que sejam feitas alterações bem
como uma posterior síntese e programação em um FPGA.
Para concretizar o trabalho proposto, o caminho delineado consistiu de cinco etapas
articuladas:
1. a primeira etapa abrangeu o levantamento bibliográfico sobre os objetos em questão, incluindo o estudo, a revisão e a classificação dos principais elementos subsidiadores das análises requeridas e propostas formuladas;
2. a segunda etapa, consistiu em aprender os blocos funcionais necessários ao deR DSP builder;
senvolvimento do simulador na biblioteca Altera
3. a terceira etapa, correspondeu à implementação do algoritmo de simulação no
R Simulink, bem como na análise, depuração e validação;
Matlab
4. a quarta etapa, foi dedicada à definição de uma proposição mais adequada;
5. a quinta etapa, foi reservada à fundamentação e ao aprofundamento teórico das
inferências ocorridas no transcorrer do trabalho e à redação final do trabalho de
dissertação.
Esta dissertação está estruturada em 6 capítulos, que guardam em si peculiaridades,
e entre si a coerência necessária às exigências da investigação, de modo a preservar sua
unidade.
O primeiro capítulo, corresponde à apresentação formal da proposta de dissertação,
sua fundamentação e seus direcionamentos.
R
O segundo capítulo, centra sua análise na biblioteca do Matlab/Simulink
desenR chamada DSP builder, onde são apresentados alguns conceitos
volvida pela Altera
básicos de estruturação dos blocos, quais as vantagens e desvantagens de utilizar tal
biblioteca, bem como a explicação das fases de um projeto utilizando a biblioteca DSP
builder e uma pequena apresentação de todas as ferramentas utilizadas para desenvolvimento do simulador.
3
O terceiro capítulo, faz uma breve apresentação sobre reguladores de tensão, demonstrando uma modelagem para reguladores de tensão bem como apresentando os
esquemas de ligação e os procedimentos de regulação de tensão atualmente utilizados.
O quarto capítulo, enfatiza o algoritmo desenvolvido para ajuste dos parâmetros
dos reguladores de tensão trifásico, utilizados em sistemas de distribuição. Ainda no
terceiro capítulo será analisada a implementação do simulador, apresentando todos os
blocos desenvolvidos e os detalhes de implementação de cada bloco.
O quinto capítulo, é dedicado a apresentar os resultados obtidos pelo simulador, a
análise de tais resultados e a comparação destes resultados com os resultados obtidos
pelo programa TOpReDE.
Nas conclusões (sexto capítulo) se estabelece um caminho de volta às proposições,
correlacionando-as com os objetivos alcançados. Apontam-se caminhos e perspectivas
geradas.
4
Capítulo 2
As ferramentas utilizadas
Este capítulo faz uma breve introdução às ferramentas utilizadas no desenvolvimento do
simulador de bancos trifásicos de reguladores de tensão, bem como analisa as vantagens
e algumas desvantagens de se utilizar tais ferramentas.
2.1
R
MATLAB
R é uma ferramenta de alto desempenho para programação técnica, foi desenMatlab
volvida pela Mathworks, empresa fundada em 1984, especializada em softwares para
R traz consigo a vantagem de que em uma mesma ferracomputação técnica. O Matlab
menta, tem-se a computação, visualização e a programação em um ambiente amigável,
onde os problemas e as soluções são expressos numa notação matemática familiar [2].
R oferece um ambiente para desenvolvimento de algoritmos em dois níveis;
O Matlab
um consiste da utilização de uma linguagem proprietária para descrição de algoritmos,
R o outro
semelhante à linguagem C, com arquivos .m no próprio ambiente do Matlab;
é um ambiente para desenvolvimento de sistemas, um ambiente gráfico, onde podem ser
instanciados blocos desenvolvidos em .m, chamado Simulink.
2.2
Simulink
Nos últimos anos, o Simulink tornou-se uma das ferramentas mais utilizadas em universidades e indústrias para se trabalhar com sistemas dinâmicos. O simulink é um pacote
de software que faz a modelagem, simulação e análise de sistemas dinâmicos. Ele su-
5
porta sistemas lineares, sistemas não lineares modelados em tempo contínuo, tempo
discreto ou híbrido. Os sistemas podem também ser multi-rate, isto é, possuem diferentes partes que podem ser amostradas ou atualizadas em diferentes taxas.
Com a ferramenta simulink, o usuário pode facilmente construir seu próprio modelo ou apenas modificar um modelo existente. O simulink trabalha com simulações
interativas, no entanto, qualquer alteração no programa pode ser notada em tempo de
simulação.
R e simulink permitem o desenvolvimento
O uso integrado das ferramentas Matlab
de algoritmos e sistemas de forma muito eficiente, permitindo desenvolver partes do
R
algoritmo em .m (extensão do Matlab),
simular estas partes individualmente e de-
pois integrá-las no sistema completo, simular o sistema e verificar o resultado final. O
sistema de desenvolvimento permite ainda, uma vez concluído o desenvolvimento e a
simulação do sistema, gerar programas em C ou código de descrição de hardware com
a implementação do sistema completo utilizando ferramentas de implementação.
2.3
Quartus II
Quartus II é um programa bastante utilizado no desenvolvimento de projetos que envolvem as linguagens VHDL e Verilog (Linguagem de descrição de hardware para projetos
eletrônicos). O programa fornece algumas ferramentas capazes de fazer análise e otimização de projetos que sejam elaborados em linguagem VHDL e Verilog para então
serem gravados em um dispositivo lógico programável. Os módulos abaixo são os blocos padrões utilizados pelo Quartus II para compilação de projetos [3].
- Analysis & Synthesis - executa a análise e síntese da lógica do projeto, com objetivo de otimizar a lógica do projeto e diminuir o tempo de compilação. Este
estágio também gera uma base de dados que será integrada ao projeto.
- Fitter - adapta a lógica do projeto em um dispositivo lógico programável.
- Assembler - converte os arquivos gerados nas fases Analysis & Synthesis e Fitter
para uma linguagem interpretada pelo dispositivo lógico programável.
- Timing Analyzer - analisa e válida a performance de tempo de toda lógica do
projeto.
6
O Quartus II utiliza os módulos de compilação com o objetivo de melhorar a lógica
do projeto e tornar o desenvolvimento do projeto mais rápido.
2.4
R DSP builder
O Altera
R Essa bibliO DSP builder é uma biblioteca para o simulink desenvolvida pela Altera.
R e de FPGA (Field
oteca integra em um único ambiente os fluxos de projeto do Matlab
Programable Gate Array), permitindo uma implementação simples e direta de algoritmos no ambiente simulink. A simulação do algoritmo dentro do ambiente simulink, a
conversão do algoritmo para código HDL e finalmente a compilação do projeto, carregálo em hardware e testar em hardware o sistema completo são atribuições da biblioteca
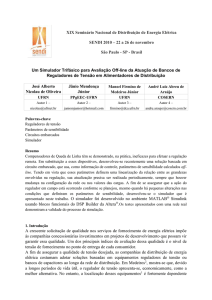
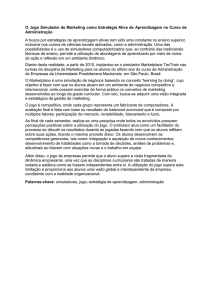
R A Figura 2.1 demonstra as fases do projeto desenvolvido pela
DSP builder da Altera.
biblioteca DSP builder [2].
Figura 2.1: Fase de projeto com a biblioteca DSP builder
R
No desenvolvimento, os algoritmos são elaborados a partir do simulink do Matlab,
porém, as ferramentas utilizadas no desenvolvimento são apenas as que estão presentes
na biblioteca DSP builder, se forem utilizados blocos de outros Toolbox que não sejam
do DSP builder, estes blocos não serão implementados em VHDL. Na elaboração de
projetos utilizando a ferramenta DSP builder podem ser utilizados os Sinks e Sources
do Toolbox do simulink, desde que os blocos utilizados sejam apenas para gerar sinais de
entrada e para monitorar os resultados intermediários e finais do modelo de construção.
A fase de implementação, caracteriza-se pela capacidade que a ferramenta DSP builder
R
tem de comunicar o ambiente de desenvolvimento Matlab/simulink
com a ferramenta
de gravação em FPGA´s (field programmable gate arrays) e o Quartus II. A última fase
7
é a de verificação que se caracteriza pela análise dos sinais do hardware no próprio
simulink.
No projeto do simulador do comportamento de bancos trifásicos de reguladores de
tensão usados em sistemas de distribuição de energia elétrica, foi totalmente concluído
apenas na fase de desenvolvimento mostrada na Figura 2.1, uma vez que não havia a
proposição de implementação final do hardware em FPGA.
2.4.1
Desenvolvimento
A biblioteca DSP Builder contém alguns blocos funcionais, dentre os quais destacam-se
os que implementam funções aritméticas (chamada Arithmetic), funções de armazenamento (storage), funções para tratamento com números complexos (Complex Type) e,
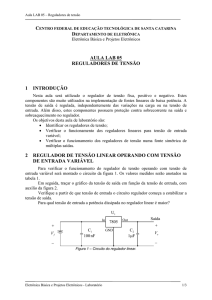
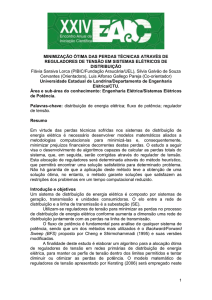
de interface com dispositivos de entrada e saída (IO & Bus). A biblioteca DSP Builder,
permite também implementar máquinas de estado, sendo possível definir os sinais de
entrada, de saída e os estados internos bem como as transições de estados. Na Figura
2.2 é mostrada a relação de todos os blocos funcionais disponíveis no simulink após a
instalação da biblioteca DSP Builder.
Uma característica importante na biblioteca DSP builder, é que a mesma traz funções
complexas já implementadas, tais como, filtros FIR (Finite Impulse Response), NCOs
(Numerically Controlled Oscilator), FFT (Fast Fourier Transform), IFFT (Inverse Fast
Fourier Transform), entre outros. Nesta categoria de funções estão incluídas as funções
R e que podem ser incluídas no projeto de
complexas de DSP desenvolvidas pela Altera
forma imediata, bastando configurar os parâmetros da função e adicioná-la ao projeto
como um novo bloco [2]. A grande vantagem na utilização da biblioteca DSP Builder é
a de que além dela conter todas as atribuições antes citadas, ainda inclui blocos que perR tais
mitem fazer a interface direta com as placas de desenvolvimento DSP da Altera,
como utilizar pinos de entrada específicos, utilizar de forma direta os conversores A/D
e D/A disponíveis na placa, acessar os LEDs e chaves da placa, entre outros recursos.
2.4.2
Implementação e verificação
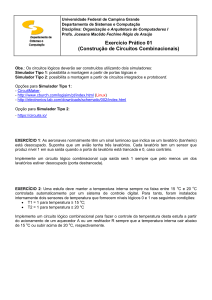
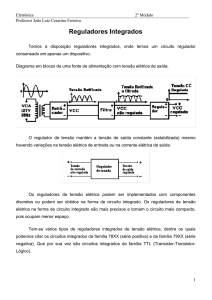
A biblioteca DSP builder fornece duas opções para síntese e compilação de projetos;
são as chamadas Fluxo Automático e Fluxo Manual. A Figura 2.3 demonstra uma visão
geral do fluxo de projeto utilizando a ferramenta DSP builder.
8
Figura 2.2: Blocos funcionais disponíveis na biblioteca DSP builder
2.4.3
Fluxo Automático (com simulink) e Fluxo Manual (sem simulink)
O fluxo automático permite fazer a síntese e compilação do projeto apenas utilizando
R
as ferramentas Matlab/simulink
com a adição da biblioteca DSP builder, a partir do
bloco SignalCompiler. No fluxo automático, o bloco SignalCompiler produz arquivos
VHDL, verilog HDL e Tcl; executa a síntese e compilação no Quartus II e opcionalmente carrega o projeto em um dispositivo lógico programável. O fluxo manual é utilizado quando o projeto necessita de configurações próprias na compilação [1].
Uma grande vantagem de utilizar a biblioteca DSP builder, é que o desenvolvimento
do sistema baseia-se no conceito de ambiente unificado onde o projeto de hardware e de
software usam a mesma infra-estrutura integrada, tendo por resultado uma melhoria do
desempenho global do sistema. A biblioteca DSP builder baseia-se no desenvolvimento
de projetos no paradigma de Co-design, cuja vantagem principal é o aumento do nível
de integração entre os sistemas, permitindo que sistemas inteiros sejam encapsulados
9
Figura 2.3: Visão geral do fluxo de projeto utilizando DSP builder
em um único chip.
Uma outra vantagem na utilização da biblioteca DSP builder é que não é necessário
ter conhecimento e prática com a linguagem VHDL, basta apenas saber manusear os
blocos do simulink de forma correta e então a biblioteca DSP Builder, a partir do bloco
SignalCompiler gera o código do projeto em linguagem VHDL.
Uma desvantagem na utilização da biblioteca DSP builder é que ela não implementa em blocos funcionais todas as ferramentas da linguagem VHDL, no entanto, se
for necessária a utilização de alguma ferramenta que a biblioteca DSP Builder não implemente, o DSP builder possui um bloco para código customizado a partir do qual
pode-se construir e adicionar a biblioteca qualquer bloco funcional.
10
Capítulo 3
Reguladores de tensão
Este capítulo apresenta alguns coneitos básicos de sistemas de distribuição de energia
elétrica, aborda também uma modelagem para reguladores de tensão, apresentando os
esquemas de ligação e os procedimentos de regulação de tensão atualmente utilizados.
3.1
Introdução
Um dos mais importantes objetivos de um sistema de qualidade, adotado pelas concessionárias de energia elétrica, é a manutenção dos níveis de tensão entregues aos seus
clientes. O suprimento das cargas presentes no sistema resulta em correntes através de
todos os componentes do sistema. Essas correntes causam quedas de tensão nos elementos presentes no sistema. A queda de tensão presente nos elementos constituintes de um
sistema é regida pela relação complexa V = I · Z . Uma das soluções mais diretas para
otimização da regulação de tensão, seria minimizar a impedância presente em todos os
elementos (as impedâncias dos condutores e as condições de carregamento influenciam
bastante na queda de tensão presente nos elementos constituintes do sistema), porém, tal
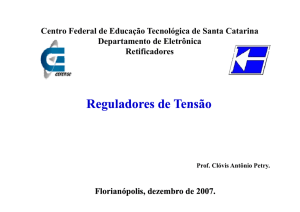
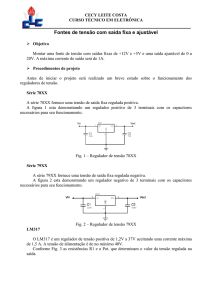
solução torna-se muito cara e bastante inviável. A Figura 3.1 demonstra um trecho de
um alimentador e tem o propósito de mostrar a origem das perdas existentes nos sitemas
de energia elétrcia.
11
Figura 3.1: Diagrama unifilar de um trecho de um alimentador.
A tensão V 2 na saída do transformador é maior que a tensão que chega à carga
0
V 2 . Isto ocorre, devido à impedância presente nos condutores aliada à corrente que flui
nestes condutores. A impedância é o resultado da resistência presente principalmente
nos condutores somada a reatância, grandeza presente em sistemas que trabalham com
corrente alternada. A demonstração da queda de tensão presente nos alimentadores, de
acordo com a Figura 3.1, é dada por:
0
V2 = V2 + Z ∗ I
(3.1)
O produto Z ∗ I representa a queda de tensão no condutor e quanto maior for a
corrente solicitada pela carga, maiores serão as perdas do sistema. A decomposição da
Equação 3.1 demonstra a relação da corrente com as perdas do sistema.
0
V2 = V2 − Z ∗ I
0
V 2 = V 2 − (r + jx) ∗ I
0
V 2 = V 2 − rI − jxI
(3.2)
0
V 2 I = V 2 I − rI2 − jxI2
Conclui-se que, um aumento de corrente se reflete significantemente em perdas para
o sistema, tendo em vista que o quadrado da corrente esta relacionado à potência ativa
(rI2 ) e potência reativa (jxI2 ) ao qual significam perdas para o sistema, como pode ser
visto na decomposição da Equação 3.1.
Uma forma de minizar as perdas em um sistema é a redução da corrente através
do sistema. Garantir que somente a porção de corrente em kVA requerida pelo cliente
12
seja entregue, ou seja, que flua pelo sistema apenas a potência solicitada, para isto é
necessária a instalação de bancos de capacitores em lugares estratégicos do sistema de
distribuição, os quais são responsáveis pela correção de fator de potência.
Um segundo método para ajuste de tensão nos sistemas de distribuição utilizado
pelas concessionárias de energia elétrica é a instalação de reguladores de tensão. O regulador de tensão nada mais é do que um autotransformador com um sistema de controle
apropriado capaz de fazer ajustes de tap de acordo com a necessidade do carregamento
do sistema [4]. Um dispositivo bem utilizado é o regulador de tensão monofásico que
pode ser empregado em sistemas monofásicos, ou pode ser conectado a outros reguladores monofásicos e formar um banco regulador para ser utilizado em sistemas trifásicos.
3.2
Reguladores de tensão
O regulador de tensão é um equipamento projetado para manter um nível de tensão prédeterminado no ponto de regulação, independentemente das variações das cargas, desde
que sua margem de regulação não seja ultrapassada. Construtivamente, é composto basicamente por um autotransformador associado a um comutador automático de derivação
sob carga e de um sistema de controle, que corrige os desvios momentâneos da tensão
de regulação, relativos ao valor especificado. Usualmente, os reguladores para redes
de distribuição são equipamentos monofásicos. Sua instalação é realizada, por meio da
formação de bancos trifásicos e, dependendo da configuração utilizada, pode-se obter
margens de regulação de até 15%1 (para cima ou para baixo).
A Figura 3.2 mostra o diagrama unifilar de uma rede de distribuição, onde o nó 1 é
a saída da subestação; entre os nós 3 e 4 está presente um regulador de tensão. Os nós
situados antes do regulador são considerados nós a montante e os nós situados depois
do regulador de tensão são considerados nós a jusante. Para efeito de simulações, o nó
situado imediatamente antes do regulador de tensão é considerado o nó regulador e para
este diagrama unifilar será considerado o nó 6 como sendo o nó regulado. A atuação
de um regulador será exemplificada através de um caso hipotético em que é necessário
elevar o nível de tensão no nó 6.
1
Os reguladores de tensão atualmente produzidos são autotransformadores reguladores com faixas
de regulação 10% acima a 10% abaixo, relativamente à tensão de linha, podendo ser ajustadas em 5%,
6,25%, 7,5%, 8,75% e 10%. A elevação ou a redução da tensão é feita em 32 degraus de aproximadamente
5/8% (16 para elevar e 16 para diminuir)
13
Monte
1
Nó
regulado
Nó
regulador
2
3
4
5
6
SVR
Figura 3.2: Diagrama unifilar de uma rede de distribuição.
O modelo básico do autotransformador usado em regulador é apresentado na Figura
3.3, em que suas bobinas são ligadas, uma em paralelo com a carga, chamada de bobina
ou enrolamento em derivação, e a outra, em série com a carga, chamada de bobina ou
enrolamento série. A bobina série poderá estar ligada no sentido de elevar a tensão no
secundário do regulador, Figura 3.3.a, ou no sentido de abaixar a tensão no secundário
do regulador, Figura 3.3.b. Um esquema genérico pode ser obtido acrescentando-se uma
chave reversível no enrolamento série como mostrado na Figura 3.3.c. Com a chave na
posição (x), o circuito funcionará como elevador e na posição (y), como abaixador de
tensão.
Figura 3.3: Modelos Básicos de autotransformador
Os reguladores trabalham igualmente bem em condições de altas ou de baixas tensões. O modelo mostrado na Figura 3.4 mostra a representação de um regulador aplicado em uma linha onde a tensão V 2 é corrigida para o valor V 3 . Os reguladores são
14
sensíveis à tensão e são usualmente controlados e ajustados automaticamente para manter constante a tensão de saída.
Figura 3.4: Modelo elétrico do conjunto rede de distribuição - regulador
3.2.1
Modelagens do Regulador de Tensão
Para modelagem de um regulador de tensão foi usado, inicialmente, o modelo visto na
Figura 3.5, apresentado em [9]. Por esse modelo, S1 e S1 são as potências aparentes
de entrada e saída do regulador, V s e V d são as tensões nos enrolamentos e Zs e Zd
representam as impedâncias do equipamento no enrolamento série e no enrolamento em
derivação, respectivamente. No circuito apresentado, para uma relação de transformação de n espiras, foi obtido o seguinte conjunto de equações:
V 2 = V 1 − V s − I s Zs
(3.3)
V d = V 1 − Id Zd − V ref
(3.4)
V s = V d /n
(3.5)
I = Is + Id
(3.6)
S1 = V 1 · I∗
(3.7)
S2 = V 2 · I∗s
(3.8)
Das observações feitas [9] em sua modelagem matemática do regulador, três pontos
devem ser ressaltados:
−→ de acordo com as equações acima, a tensão V s que está sendo somada à tensão
de entrada do regulador, estará praticamente em fase com a tensão de entrada V 1 ,
15
Figura 3.5: Modelo de referência para um regulador de tensão monofásico
no caso em que V ref é a tensão de neutro e, poderá estar defasada em relação à
tensão de entrada, no caso em que V ref é uma tensão de outra fase. Isso significa
que, além de ocorrer um incremento no módulo da tensão de entrada, o ângulo da
tensão de saída poderá não ser o mesmo que o da tensão de entrada.
−→ no caso em que o ramo em derivação de um regulador adota como referência uma
outra fase (em vez de um ponto neutro), a potência na entrada do regulador não
será necessariamente igual à potência na sua saída, ou seja, a presença do ramo
em derivação permite que a fase a ele ligada forneça potência ativa ao regulador.
−→ depois que a corrente que passa pelo regulador ultrapassa a sua corrente nominal,
a sua capacidade de regulação passa a decrescer. Porém, essa perda de capacidade
de regulação não é diretamente decorrente das características elétricas internas
(queda de tensão, perdas, relação de espiras) do regulador, mas de um ajuste que
é feito manualmente no regulador onde o tap máximo é limitado, para que os
limites de operação do equipamento não sejam ultrapassados.
3.2.2
Esquemas de ligação de reguladores em circuitos trifásicos
Os três esquemas usuais de construção de bancos trifásicos de reguladores são o Estrela
Aterrada 2 , mostrado na Figura 3.6, que usa três reguladores monofásicos, o Delta,
2
Três reguladores não podem ser ligados diretamente em Estrela Isolada em circuito trifásico a três
fios pois pode haver deslocamento do neutro.
16
mostrado na Figura 3.7, que usa também três reguladores monofásicos e o Delta Aberto,
mostrado na Figura 3.8, que usa apenas dois reguladores monofásicos. Notar que cada
fase está ligada a uma bobina em derivação, na saída do regulador, sobre a qual se aplica
uma tensão de fase (ligação em Estrela) ou de linha (ligações Delta e Delta Aberto) e
que as impedâncias, série e paralela, são representadas por uma impedância equivalente
Z, no ramo série.
Figura 3.6: Ligação Estrela Aterrada de três reguladores monofásicos em uma rede de
distribuição trifásica.
17
Figura 3.7: Ligação Delta de três reguladores monofásicos em uma rede de distribuição
trifásica.
Figura 3.8: Ligação Delta Aberto de três reguladores monofásicos em uma rede de
distribuição trifásica.
No esquema em Estrela Aterrada, as tensões de fase V A2 , V B2 e V C2 são aplicadas
nas bobinas em derivação que induzem tensões nV A2 , nV B2 e nV C2 nas bobinas série
correspondentes. Estas tensões serão somadas às tensões de entrada V A2 , V B2 e V C2 .
Nesse tipo de configuração as tensões reguladas se mantêm em fase com as tensões de
18
entrada, mas para uma mudança máxima de tap, a máxima regulação que se pode obter
é de 10% (para cima ou para baixo).
Numa ligação em Delta (Figura 3.7), pode-se observar que as tensões aplicadas nas
bobinas em derivação dos reguladores são tensões de linha e não de fase. Neste caso, as
parcelas das tensões de linha nV AB2 , nV BC2 e nV CA2 serão somadas, respectivamente,
as tensões de entrada dos reguladores V A1 , V B1 e V C1 . Como as tensões de linha são
maiores do que as tensões de fase, consegue-se uma faixa de regulação de até 15%
(para cima ou para baixo), 50% maior do que a faixa de regulação que se obtem com o
esquema de ligação em Estrela Aterrada.
No esquema em Delta Aberto (Figura 3.8), são utilizados apenas dois reguladores
monofásicos. Nesta configuração, as três tensões de linha aumentam ou diminuem proporcionalmente. Com esse esquema de ligação, consegue-se uma faixa de regulação de
até 10%, igual, portanto, ao esquema em Estrela Aterrada, mas, com um regulador a
menos.
3.2.3
Procedimentos atuais de controle dos reguladores de tensão
Os controles atuais dos reguladores de tensão incorporam lógica digital e tecnologia microprocessada, normalmente de 8 bits, associadas a um conversor analógico/digital. A
lógica de operação dessas unidades de controle é disparada sempre que a tensão medida
na saída do regulador apresentar valores fora de uma faixa pré-estabelecida de tensões
de ajuste. Por exemplo, entre 119 V e 121 V para uma tensão de base 120 V e uma
largura de faixa de 2 V [5]. A operação da unidade de controle pode ser descrita de
acordo com os seguintes procedimentos:
1. quando a tensão medida move-se para um nível fora da faixa, a amostra do sinal
é convertida em um formato digital e fornecida ao microprocessador;
2. o microprocessador, reconhecendo a condição de tensão como fora da faixa, dispara um circuito de retardo de tempo3 , sendo este tempo de retardo igual ou superior a 30 s;
3
O tempo de retardo é o período de tempo (em segundos) que o controle espera, desde o primeiro
instante quando a tensão sai da faixa ao instante em que o relé, responsável por elevar ou abaixar a
tensão, atua. Se uma resposta rápida é requerida, um valor pequeno de ajuste deve ser feito. Se há vários
reguladores na mesma linha para serem coordenados (em cascata), diferentes ajustes de tempo de retardo
serão requeridos para permitir a operação adequada na seqüência desejada. Partindo da subestação, cada
19
3. enquanto aguarda o término do tempo de retardo, a tensão é continuamente medida. Se a tensão momentaneamente mover-se para a faixa, a operação de ajuste
será interrompida. Persistindo a condição fora de faixa, ao término do tempo de
retardo, uma mudança de tap é iniciada;
4. ao reconhecer que a mudança de posição de tap foi completada, é feita uma pausa
de 2 s. Após essa pausa, se a tensão medida ainda estiver fora da faixa, outra
mudança de tap é iniciada. Este procedimento se repete até que a tensão medida
volte para a faixa, quando então a operação de ajuste é concluída.
Em geral, como garantia de funcionamento adequado do controle, é incluído um
sistema de vigilância, chamado de cão de guarda watchdog, executado periodicamente,
de tal forma que se houver qualquer anormalidade no funcionamento do sistema, a execução do software será reinicializada.
regulador deveria ter um tempo de retardo maior que o regulador que o precede. Recomenda-se um
mínimo de 15 segundos de diferença entre reguladores localizados na mesma fase do mesmo alimentador.
O retardo permite que reguladores a montante atuem antes dos reguladores a jusante.
20
Capítulo 4
O algoritmo de simulação
Este capítulo tem por objetivo detalhar o algoritmo desenvolvido para ajuste das tensões
de saída dos bancos trifásicos reguladores de tensão utilizados em sistemas de distribuição de energia elétrica, bem como demonstrar a teoria na qual esse simulador foi
baseado e detalhar todos os blocos constituintes do simulador.
4.1
Embasamento para o desenvolvimento do simulador do comportamento de bancos trifásicos de reguladores de tensão
Baseado em estudos de fluxo de carga em sistemas de distribuição de energia elétrica,
realizados em alimentadores reais [13] [14] [10], concluiu-se que a tensão de todos os
nós a jusante do regulador variam linearmente com a sua tensão de saída, considerando
cargas constantes, para os nós 7, 11 e 21 do alimentador mostrado na Figura 4.1 usado
em uma das simulações da referência [12]. Similarmente, para uma condição fixa de tap
do regulador, as tensões nos nós a jusante, também variam linearmente, para excursões
de carregamentos no intervalo usual da curva de carga diária.
Esses dois comportamentos lineares da variação de tensão, para todo nó j situado a
jusante de um regulador, fixado em um nó i, são dados pelas duas equações abaixo.
∆Vj =
∂Vj
∂Vi
∆Vi |∆fc = 0
21
(4.1)
Figura 4.1: Alimentador utilizado em uma das simulações.
∆Vi =
∂Vi
∂Vj
∆Vj |∆fc = 0
(4.2)
Donde pode-se depreender que a variação total da tensão no ponto de regulação será
dada por [5]:
∂Vj
∆Vi +
∂Vj
∆fc j
(4.3)
∂Vi
∂fc j
Tais observações permitiram chegar à conclusão de que é possível controlar a tensão
Vj =
de regulação, em qualquer ponto desejado, a partir dos coeficientes das funções que
definem essas linearizações, para cada nó, situado a jusante do regulador. Assim, a
tensão que se estabelecerá em um nó regulado j, em decorrência da medição de uma
variação de tensão no nó regulador i, será dada pela seguinte Equação:
∂Vj
(Vimed − Viant )
(4.4)
∂Vi
Semelhantemente, uma variação de carga ∆fc implicará em tensões nos nós, reguVjest = Vjant +
lador e regulado, dadas respectivamente por:
22
Vjest = Vjant +
Vimed = Viant +
∂Vj
∂fc
∂Vi
∆fc
(4.5)
∆fc
∂fc
Fazendo-se a relação entre 4.5 e 4.6, como mostrado abaixo,
Vjest = Vjant +
∂Vj
∂fc
∂Vi
∂fc
(4.6)
(Vimed − Viant )
(4.7)
(Vimed − Viant )
(4.8)
Obtém-se:
Vjest = Vjant +
∂Vj
∂Vi
Onde:
Vjest - Tensão de regulação estimada no nó j.
Vimed - Tensão medida na saída do regulador.
Vjant - Tensão de regulação no nó j anterior à variação..
Viant - Tensão na saída do regulador anterior à variação..
fc - fator de carregamento.
Monitorando-se a tensão de saída do regulador, será possível então obter o valor da
tensão Vimed e estimar a tensão no ponto de regulação Vjest , de acordo com 4.8 [5].
Com o conhecimento dos parâmetros de sensibilidade
∂Vj
∂Vi
e
∂Vj
∂fc
, é possível também
fazer uma estimativa da mudança que irá ocorrer no perfil de tensão de um alimentador,
em decorrência de uma variação imposta por mudança dos taps de um banco regulador
de tensão bem como por uma variação imposta por mudanças no carregamento.
4.2
4.2.1
Desenvolvimento
Diagrama de blocos do simulador monofásico
R
Em um primeiro momento, foi desenvolvido um sistema em Matlab/Simulink
com
a adição da biblioteca DSP Builder para fins de simulação do comportamento de reguladores de tensão em sistemas monofásicos [7], tal sistema é capaz de controlar a
tensão de regulação, em qualquer ponto desejado (local ou remoto), a partir dos coeficientes das funções que definem cada nó. A Figura 4.2 ilustra o diagrama de blocos do
algoritmo de simulação de um regulador de tensão monofásico.
23
Figura 4.2: Diagrama de blocos do simulador do regulador monofásico
A partir da implementação do simulador monofásico, foi desenvolvido o simulador de bancos trifásicos de reguladores. Os blocos do diagrama da Figura 4.2 serão
explicados com mais detalhes na Subseção 4.2.2.
4.2.2
Diagrama de blocos do simulador trifásico
A implementação do simulador do banco regulador trifásico mostrado na Figura 4.3,
incorpora todos os blocos desenvolvidos no simulador monofásico e adiciona outros
blocos. O simulador de bancos reguladores trifásicos foi desenvolvido utilizando-se as
R
ferramentas Matlab/Simulink
e a biblioteca DSP Builder, no entanto a geração do
código em linguagem VHDL foi feita a partir do Quartus II.
ROMp1
ROMc1
InLoad
Reset
Plot
Medidor de
tensão
UAT (Unidade
ROMp2
V1
ROMc2
de Ajuste de
Tensão)
UAT (Unidade
ROMp3
UAT (Unidade
V2
ROMc3
V3
de Ajuste de
Tensão)
MdE
V1
V2
V3
ADC
UCAT
(Unidade de
cálculo das
tensões)
Sampler
UCT
(Unidade
de
controle
de Tap)
de Ajuste de
Tensão)
V1
V2
V3
Figura 4.3: Diagrama de blocos do simulador do banco regulador trifásico
No diagrama de blocos apresentado na Figura 4.3, as unidades ROMp1, ROMp2,
ROMp3 e ROMc1, ROMc2, ROMc3 são memórias que permitem o pré-armazenamento
24
de dados. Esses dados são os perfis de tensão e os coeficientes de tensão de todos os nós
presentes no alimentador informados pelo programa TOpReDE. No modelo proposto,
através da unidade Sampler seria possível simular o comportamento do circuito a partir
dos sinais efetivamente medidos, informados pelo ADC ou por um valor de posicionamento atual do tap, informado pela UCT (unidade de controle de tap). No entanto, a
unidade Sampler não será implementada, porém, ela é demonstrada no diagrama como
forma de continuação deste trabalho.
Toda temporização do modelo é feita pela Máquina de Estado (bloco MdE), sendo
possível controlar, por meio do sinal InLoad se em uma simulação deve-se ou não carregar um novo perfil de tensão e novos coeficientes de tensão. As condições inicias e
as restrições de regulação, diferentemente do simulador do regulador monofásico, são
incorporadas ao bloco UCAT do simulador de bancos reguladores trifásicos de tensão.
As principais unidades do modelo são a UAT (Unidade de ajuste de tensão), UCT
(Unidade de controle de Tap) e UCAT (Unidade de Cálculo de Tensões). Cabe a UAT
fazer todas as análises necessárias que lhe permitam estimar as tensões de fase na saída
do nó regulador e que irá garantir a tensão desejada no nó regulado. A UCT se responsabiliza pelas mudanças de tap e pela atualização da tensão de saída do regulador. A
UCAT é responsável pelo cálculo dos perfis de tensão do alimentador após variações de
tensões na saída do regulador. A implementação de uma fase (fase 1) bem como os valores de tensão inicial, tensão estimada, posição do tap e tensões de saída do regulador,
referentes as três fases, são demonstrados na Figura 4.4.
25
Figura 4.4: Modelo do algoritmo de simulação para controle de tensão em um alimentador com regulador trifásico
Ainda observando a Figura 4.4, é notada a presença de um bloco chamado "HDL
SubSystem In Tap F1". Nesse bloco, estão situadas as unidades UAT (Unidade de ajuste
de tensão), UCT (unidade de controle de tap) e UCAT (Unidade de Cálculo de Tensões)
que serão melhor explicadas nas seções seguintes. A implementação das três fases do
simulador de bancos reguladores trifásicos é mostrada no Anexo A.
4.2.3
O simulador trifásico
O simulador desenvolvido é de interface amigável, ou seja, de fácil manuseio. Os dados
de entrada no simulador serão as quantidades de nós do alimentador a serem analisados
(vnNohsx), o nó regulador (vNohix), o nó regulado (vNohjx) e a tensão desejada no
nó regulado (vVjDejx) em p.u. O dados de saída das três fases serão a tensão atual no
nó regulador (DspVi_Fx), tensão estimada no nó regulador (DspViEspFx), variação de
26
tap (DspPosTap_Fx), tensão atingida no nó regulador (DspViAt_Fx) e o valor da diferença entre a tensão estimada e a tensão atingida (Dsp_Dif_ViAt-Viesp_x). Os dados
de entrada como os dados de saída podem ser visualizados na Figura 4.4.
Na Figura 4.4 é mostrado o modelo em uma simulação de um alimentador de vinte
e três nós com um banco regulador trifásico situado no nó 7, regulando o nó 16 em
aproximadamente 0.90 p.u na fase 1, 0.92 p.u. na fase 2 e 0.94 p.u na fase 3.
Armazenadas as informações inerentes ao alimentador (perfil de tensão, quantidade
de nós à serem analisados, nó regulador, nó regulado e faixas de tensões no nó regulado)
o algoritmo de simulação executa os seguintes passos:
1. Calcula as tensões inicias no nó regulador e estima as tensões de saída do nó
regulador para obter uma condição prévia as variações.
2. Verifica quantos passos, relativamente à posição atual de tap deve ser elevada ou
baixada para este objetivo.
3. Envia o sinal para mudança de tap se nenhuma restrição for violada; senão reavalia as mudanças de tap de acordo com a etapa precedente.
4. Calcula o novo perfil de tensão do alimentador, se alguma variação de tensão tiver
ocorrido na saída dos reguladores e, o representa graficamente.
Na situação apresentada na Figura 4.4, a tensão final estimada na saída do regulador
é de 0.971445 p.u na fase 1, 0.987273 p.u. na fase 2 e 1.003541 p.u. na fase 3, a tensão
inicial na saída do regulador era de 0.994257 p.u. para fase 1, 0.997905 p.u. para fase 2
e 1 p.u. na fase 3, deste modo, esses valores de tensões iniciais representam o caso base.
O tap está na posição -3 na fase 1 e, para este posicionamento do tap, a tensão de
saída do regulador é de 0.975507 p.u., na fase 2, o tap está na posição -1 e a tensão de
saída do regulador é de 0.991655 p.u. e, na fase 3 o tap está na posição 0 (não houve
mudança de tap para esta fase) e a tensão de saída do regulador é de 1 p.u (a mesma
tensão inicial, pois não foi necessária uma mudança de tap).
Após ocorrerem as devidas mudanças de tap, o simulador informa a diferença de
tensão entre a tensão estimada e a tensão atingida. A diferença de tensão foi de 0.004062
p.u. na fase 1, 0.004381 p.u. na fase 2 e de 0.003541 p.u. na fase 3.
Os blocos funcionais do simulador trifásico desenvolvidos foram: MdE (máquinas
de estados), UAT (unidade de ajuste de tensão), UCT (unidade de controle de Tap) e
27
UCAT (Unidade de Cálculo das tensões). Um bloco ao qual foi previamente desenvolvido é a unidade ADC (Conversão Analógica Digital), porém, sua atuação não será
verificada devido a proposta da implementação do simulador não abranger a atuação em
dispositivos lógicos programáveis.
As subseções seguintes explicarão detalhadamente como funciona cada bloco desenvolvido bem como a utilização das memórias de dados pré-armazenados (ROMp1,
ROMp2, ROMp3, ROMc1, ROMc2 and ROMc3) entre outras implementações.
4.2.4
Memória ROM
As memórias utilizadas no desenvolvimento do simulador são memórias do tipo ROM
que trabalham com dados pré carregados (são chamadas de ROM EAB pela biblioteca
DSP Builder). Um detalhe na utilização destas memórias é que elas leêm apenas dados
no formato Intel HEX (.hex). Maiores detalhes sobre o formato Intel HEX são explicados no Apêndice B.
A utilização das memórias ROM são de grande importância para a robustez do simulador desenvolvido. A principal característica na utilização destas memórias é o fato
delas lerem arquivos texto escritos no formato Intel HEX. Diante disto, foi possível validar os resultados do simulador em comparação com os dados gerados pelo programa
TOpReDE. Dentro do programa TOpReDE foi incluído um código escrito em linguagem
C++ para gerar arquivos texto no formato Intel HEX, então, alguns dados de entrada necessários ao simulador, tais como, os perfis de tensão e os coeficientes de tensão foram
gerados e codificados no formato intel HEX e fornecidos ao simulador para então serem
lidos pelas memórias ROM.
No caso do simulador ser implementado em um dispositivo lógico programável, a
utilização das memórias ROM seria de grande importância, no sentido de que se houvesse a necessidade de uma recarga dos dados das memórias, seria suficiente apenas
uma troca de cartão de memória, não sendo necessária uma mudança no simulador e
uma nova gravação do simulador no dispositivo lógico programável.
A figura 4.5 demonstra duas memórias ROM utilizadas na implementação do simulador, uma para armazenar os perfis de tensão (ROM EAB) e a outra para armazenar os
coeficientes de tensão (ROM EAB1) referentes à fase A. Na figura 4.5 também pode ser
percebido um bloco dos parâmetros das memórias (Block Parameters: ROM EAB).
C As palavras contidas no arquivo .hex do simulador, são palavras de 32 bits geradas
28
Figura 4.5: Memória Rom
pelo programa TOpReDE, e um detalhe a ser exposto é que o formato intel HEX só
reconhece números inteiros, sinalizados ou não.
Os perfis de tensão e os coeficientes de tensão (dados codificados no formato intel
HEX) são, na maioria das vezes, números fracionários, então, para que esses números
sejam codificados para o formato requerido, é necessário transformá-los em números
inteiros. O artifício utilizado para transformar os números fracionários em números
inteiros, é a multiplicação dos perfis e coeficientes de tensão por um número grande
de forma que não perca tanto a precisão das casas decimais do número. Após serem
transformados em números inteiros, eles finalmente são codificados para o formato intel HEX (tanto a codificação quanto a transformação foram realizadas pelo programa
TOpReDE) e passados ao simulador, então, o simulador lê esses dados das memórias
ROM e dividi-os pelo mesmo coeficiente ao qual foram multiplicados para se obter o
número fracionário. Na divisão feita pelo simulador, os números fracionários perdem
precisão, muitas das vezes, a partir da terceira casa decimal depois da vírgula, comprometendo muito a precisão dos resultados finais do simulador. Diante deste problema, a
solução encontrada foi fazer a normalização dos perfis de tensão e dos coeficientes de
tensão, de modo que, como as palavras do arquivo .hex armazenavam dados de 32 bits,
o maior valor a ser representado tanto para os perfis, quanto para os coeficientes de ten-
29
são é de 231 , pois o bit mais significativo é o bit de sinalização. A Tabela 4.1 demonstra
as formas de representação de alguns valores dos perfis e coeficientes de tensão.
Tabela 4.1: Representação de valores
Perfil de tensão (p.u.) Perfil de tensão (normalizado) Perfil de tensão (.hex)
1
2147483648
:0400xxxx80000000xx
0.9998
2147060736
:0400xxxx7FF98C00xx
0.9561
2053328896
:0400xxxx7A635000xx
0.9140
1962930560
:0400xxxx74FFF180xx
O objetivo da normalização foi fazer com que o simulador entendesse os números
normalizados como números fracionários, e isso foi possível devido à propriedade das
memórias ROM de interpretar os dados do arquivo .hex como números fracionários
sinalizados. Esta propriedade pode ser vista na Figura 4.5, caracterizada por Data Bus
Type: Signed Fractional.
4.2.5
Temporização do modelo
Toda temporização do circuito simulador acompanha o diagrama de estado mostrado na
Figura 4.6, gerado pela MdE (máquina de estado) MdEcaPerfil. Na Figura 4.6, S1 representa o estado inicial e os símbolos IL, Str e P l são, respectivamente, abreviações
dos sinais InLoad, Start e Plot.
Figura 4.6: Temporização do sistema.
Em seqüência têm-se: a inicialização da UAT em S1; a inicialização da UCT em
S2; a transferência de parâmetros de tensão da rede para a UAT e o cálculo das tensões
estimadas em S3; os cálculos e as definições de mudanças dos taps são implementadas
durante os estados S4, S5, S6 e S7 e; em S8 e S9 são concluídos os ajustes de tensões
e calculado o novo perfil de tensão do alimentador.
30
Figura 4.7: Máquina de estados (MdEcaPerfil) e bloco de configuração.
Toda a configuração da máquina de estados MdEcaPerfil é feito a partir do bloco
DSP builder - Sate Machine Builder como pode ser visto na Figura 4.7. Neste bloco
são informadas as entradas (Inputs), os estados da máquina (States) e as condições dos
estados (Conditional Statements). A Figura 4.7 demonstra as entradas e os estados na
máquina de estados MdEcaPerfil e no bloco de configuração é demonstrado as condições dos estados de acordo com o grafo da Figura 4.6.
4.2.6
A UAT (unidade de ajuste de tensão)
Implementada como um subsistema, a UAT, mostrada na Figura 4.8, é basicamente composta por duas memórias RAM (random access memory), duas memórias FIFO (first in
first out), um contador, alguns operadores lógicos e aritméticos, uma máquina de estado
e um multiplexador, sendo responsável pela análise das condições atuais do alimentador e pela estimação das tensões de saída do banco regulador frente às imposições de
tensões e de cargas em cada nova simulação.
Após ser inicializada os valores dos perfis de tensão e os valores dos coeficientes
de tensão, são passados das memórias (ROMp1, ROMp2, ROMp3, ROMc1, ROMc2
and ROMc3), externas ao bloco UAT, para memórias RAM internas ao bloco UAT. O
contador é iniciado com o número de nós da rede e são buscadas as informações de
número de nós, do nó regulador, do nó regulado e dos valores de tensões de regulação
desejados no nó regulado.
31
Figura 4.8: Unidade de ajuste de tensão
Como dito anteriormente, a UAT é responsável por estimar as tensões de fase na
saída do regulador. Este cálculo de estimação é baseado na Equação 4.8 [5], de onde
chegou-se a Equação 4.9:
Viest = Viant +
∂Vi
∂Vj
(Vjdes − Vjant )
(4.9)
onde:
Viest - Tensão de saída estimada no nó regulador i.
Viant - Tensão de saída anterior a uma regulação de tensão no nó regulador i.
∂Vi
∂Vj
- Inverso do coeficiente de tensão.
Vjant - Tensão de regulação anterior a uma variação de tensão no nó j.
Vjdes - Tensão de regulação desejada no nó j.
A UAT foi desenvolvida com base na Equação 4.9. Analisando a Figura 4.8 percebese cada bloco responsável pelo cálculo do Viest . No centro da Figura tem-se três blocos
denominados DeltaVj, DeltaVi e vViEsp. De acordo com a Equação 4.9, eles calculam
32
respectivamente a diferença entre a tensão de regulação desejada no nó j e tensão de
regulação anterior a uma variação de tensão no nó j (DeltaVj); o produto entre o inverso
do coeficiente de tensão e a diferença entre as tensões (Vjdes e Vjant ) (DeltaVi) e por
último a soma entre DeltaVj e DeltaVi (vViEsp).
Um detalhe a ser notado na Equação 4.9, é que o elemento
∂Vi
∂Vj
é o inverso do coe-
ficiente de tensão. Então, os coeficientes de tensão são, na maioria das vezes, números
fracionários. Para fazer o cálculo do inverso dos coeficientes de tensão utilizou-se o
bloco Divider. No entanto, o Divider não trabalha com números fracionários o que
obrigou a utilização de um artifício fosse possível trabalhar com os coeficientes de tensão. O artifício utilizado foi; a divisão dos coeficientes de tensão por uma constante
(um número grande 218 ), com o objetivo de não perder a precisão das casas decimais,
e depois multiplicar o resultado pelo inverso da constante. Os blocos da biblioteca DSP
builder utilizados para realizarem esta operação foram o Divider e o Binary Point Casting que podem ser vistos no canto superior direito da Figura 4.8. O artifício utilizado é
demonstrado na Equação 4.10.
218 1
X
218
=
1
X
(4.10)
Temporização interna na UAT
Internamente, toda operação da UAT é controlada pela máquina de estado MdE1_2, cujo
diagrama de estado é mostrado na Figura 4.9, com estado inicial S1_1 e seqüência de
operação disparada com o reconhecimento de um nível 0 no sinal sCont, emitido pela
máquina de estados MdEcaPerfil.
Figura 4.9: Temporização na UAT.
Durante S1_1 são armazenados, nas memórias FIFO1_1 e FIFO1_2, os perfis de
tensões e os coeficientes de tensão e, durante S2_1 a S8_1 são controladas as operações
executadas pela UAT no cálculo estimado das tensões de saída dos reguladores, a serem
disponibilizadas para a UCT.
33
Figura 4.10: Máquina de estados (MdE1_2) e bloco de configuração.
De forma idêntica a configuração da máquina de estados MdEcaPerfil, a configuração da máquina de estados MdE1_2 também foi feita a partir do bloco DSP builder
- State Machine Builder como pode ser visto na Figura 4.10. Essa figura mostra as
entradas e os estados na máquina de estados MdE1_2 e no bloco de configuração são
mostradas as condições dos estados, que foram embasados na seqüência de operação da
máquina de estados MdE1_2.
Um bloco bastante importante da biblioteca DSP builder no desenvolvimento do simulador é o Delay, ele serve para sincronizar os tempos de amostragem do simulador,
por exemplo, para serem feitas as leituras corretas dos perfis de tensão e coeficientes de
tensão dos seus respectivos nós foi necessário incluir o bloco Delay na UAT que pode
ser visto na parte superior da Figura 4.8 abaixo do bloco Counter. O bloco Counter é
responsável por ler a quantidade de nós do alimentador que foram informadas no simulador, dar estímulo às memórias ROM para que estas passem os valores dos perfis de
tensão e coeficientes de tensão paras as memórias RAM internas ao bloco UAT e o bloco
Counter também determinem quais posições das memórias RAM os dados passados das
memórias ROM serão armazenados. No entanto, o bloco Counter e as memórias RAM
estão localizadas dentro do subsistema UAT e as memórias ROM estão na parte externa
do simulador, então, um sinal enviado pelo bloco Counter as memórias ROM percorre
muito mais blocos do que um sinal enviado do bloco Counter as memórias RAM. Deste
modo, para sincronizar estes sinais, foi utilizado o bloco Delay.
34
4.2.7
A UCT (Unidade de controle de tap)
A UCT, responsável pelas mudanças de taps, é também implementada como um subsistema, mostrado na Figura 4.11, e composto basicamente por uma memória FIFO, um
contador, alguns multiplexadores e alguns operadores lógicos e aritméticos.
Figura 4.11: Unidade de controle de tap
Após ser inicializado por S1, emitido pela MdE MdEcaPerfil, a UCT fica em estado
de espera, aguardando as informações de tensões iniciais e estimadas, geradas pela UAT,
quando então, passa a monitorar as medições de tensões, recebidas através do bloco
ADC ou auto-realimentadas. Com base nos valores iniciais, estimados e medidos, o
bloco UCT calcula e executa as mudanças necessárias de taps. O funcionamento da
UCT pode ser melhor explicado se for analisada a expressão 4.11.
|(Viest − Vimed )160| ≥ 1
(4.11)
Vimed - Tensão medida na saída do nó regulador i.
A Equação 4.11 determina se haverá ou não variação de tap, de modo que se a
condição for atendida haverá variação de tap. Um detalhe importante nesta equação é o
número "1", pois este número determina a restrição na variação de tap. Se a diferença
35
entre Viest e o Vimed for inferior a 1 p.u. não haverá mudança no posicionamento do
tap do regulador.
Uma outra implementação importante na UCT, é determinar se a variação de tap
vai ser de elevação ou abaixamento, então utilizou-se o bloco ExtractBit que pode ser
notado quase ao centro da Figura 4.11. Se o bit mais significativo do resultado de
(Viest − Vimed ) for 1 (resultado positivo), haverá uma elevação no posicionamento do
tap e se o bit mais significativo for 0, haverá um abaixamento no posicionamento do
tap.
Na parte superior direita da Figura 4.11 tem-se três blocos que são: PosTap[4:0],
iTap e pTap. O bloco PosTap[4:0] informa a posição atual do tap, o bloco iTap informa
se haverá elevação (1) ou abaixamento (0) do posicionamento atual do tap e o bloco
pTap informa se haverá (1) ou não (0) mudança no posicionamento do tap. Os reguladores de tensão. Os blocos If´s são responsáveis por esse controle nos degraus, então se
uma regulação de tensão necessita mais do que 16 degraus para cima ou para baixo os
blocos If´s limitam essa mudança assim como é feito nos reguladores de tensão atuais.
Na parte inferior central da Figura 4.11 existem dois blocos com os valores 0.00625
e −0.00625 que são os valores em p.u. aos quais serão incrementados ou rebaixados
ao valor de tensão de saída do regulador se houver uma mudança de tap1
4.2.8
A UCAT (Unidade de cálculo das tensões)
Este subsistema é composto por duas memórias ROM , um contador, operadores lógicos
e aritméticos. A UCAT tem a sua principal tarefa, de ao final da simulação, durante o
estado S8 da máquina de estados MdEcaPerfil, gerar e armazenar os novos perfis de
tensão do alimentador, como mostrado na Figura 4.12, provocados pelas mudanças nos
taps dos reguladores.
1
Considerando os reguladores de distribuição atualmente produzidos com faixas de regulação iguais
a +-10% da tensão de linha, um degrau corresponde a aproximadamente 5/8% da sua tensão de base
correspondente a 0,625% de sua tensão nominal. Para 13.8 KV igual a 86,25V ou 0.00625 p.u.
36
Figura 4.12: Unidade de cálculo das tensões
A UCAT foi toda desenvolvida com base na Equação 4.12, que foi obtida a partir da
equação 4.8.
Vj = Vjant +
∂Vj
∂Vi
(Viat − Viant )
(4.12)
onde:
∂Vj
∂Vi
- Coeficiente de tensão.
Viat - Tensão de saída atingida no nó regulador i.
Na Figura 4.12 têm-se três blocos denominados DeltaVi, DeltaVj e vVj. De acordo
com a Equação 4.12 eles calculam respectivamente a diferença entre a tensão de saída
atingida no nó regulador i e tensão de saída anterior a uma regulação de tensão no nó
regulador i (DeltaVi); o produto entre o coeficiente de tensão e a diferença entre as
tensões (Viat e Viant ) (DeltaVj) e por último a soma entre DeltaVi e DeltaVj (vVj) para
chegar ao resultado do V j. As memórias ROM utlizadas na UCAT foram utilizadas
com o mesmo propósito para o qual foram utilizadas no bloco UAT, ou seja, passar os
valores referentes aos perfis de tensão e coeficientes de tensão.
Como dito anteriormente, o bloco UCAT só atua no estado S8 da máquina de estados MdEcaPerfil, ou seja, ao término das operações da UAT e UCT, no entanto, ele
é de grande importância para a validação do simulador. O bloco UCAT é responsável
por gerar vetores com número de nós (vnNohs), tensão de regulação anterior a uma variação de tensão no nó j (Vjant ) e a tensão de regulação no nó j (Vj ). Estes vetores
R onde foi desenvolvido um algoritmo em .m
são informados ao workspace do Matlab,
37
R para gerar gráficos. Este algoritmo é chamado de PLOTAR 1. O
(extensão do Matlab)
algoritmo .m
PLOTAR 1
como também a descrição do simulador em VHDL podem ser
vistos no CD em anexo a este documento.
O algoritmo para desenvolvimento de gráficos, foi feito com o objetivo de comparação entre os resultados obtidos com o simulador do comportamento de bancos trifásicos
de reguladores de tensão e os resultados obtidos pelo programa de análise de fluxo de
cargas (TOpReDE). A análise dos resultados obtidos será discutida no capítulo 5.
38
Capítulo 5
Resultados e discussões
Este capítulo apresenta os resultados alcançados a partir do simulador do comportamento de bancos trifásicos de reguladores de tensão. A análise de tais resultados, baseiase na comparação dos resultados do simulador com os resultados obtidos pelo programa
de análise de fluxo de carga, o TOpReDE, como forma de validação do simulador.
5.1
Comparação de resultados
O simulador foi implementado com base nos coeficientes das funções que definem a
sensibilidade de tensão (coeficientes de tensão) para cada nó presente em um alimentador. Como forma de validação no uso destes coeficientes de tensão para definição do
novo perfil de tensão do alimentador, em resposta a variações de tensão, tomando como
base alguns alimentadores, foram feitas algumas análises.
Na Tabela 5.1 estão representados os dados referentes aos nós 10 e 12 de um alimentador real, de 56 nós, após uma determinada variação de tensão na saída do nó
regulador, nó 7, para este caso. Este mesmo alimentador de 56 nós será utilizado em
todas as análises feitas neste capítulo. A Tabela 5.1 tem como objetivo demonstrar os
resultados obtidos pelo simulador e também fazer uma comparação com os resultados
obtidos no programa TOpReDE.
39
Nó 10
Tabela 5.1: Tabela para comparação com o TOpReDE
A
B
C
Nó 12
A
B
Vjant
0.9546
0.9604
0.9644
Vjant
0.9381
Vjdes
0.90
0.92
0.94
Vjdes
0.90
VjSim
0.9046
0.9292
0.9457
VjSim
0.9068
0.9265 0.9443
VjT .M aior
0.9409
0.9410
0.9450
VjT .M aior
0.9373
0.9388 0.9439
VjT .M edia
0.9229
0.9330
0.9270
VjT .M edia
0.9212
0.9228 0.9280
VjT .M enor
0.9027
0.9030
0.9067
VjT .M enor
0.9047
0.9062 0.9114
Viant
0.9942
0.9979
1
Viant
0.9942
0.9979
Viest
0.9396
0.9574
0.9755
Viest
0.9561
0.9726 0.9894
Viat
0.9442
0.9666
0.9812
Viat
0.9630
0.9791 0.9937
Pos. tap
-8
-5
-3
Pos. tap
-5
Dif. Viest
0.0046
0.0091
0.0056
Dif. Viest
0.0068
C
0.9453 0.9505
0.92
-3
0.94
1
-1
0.0065 0.0042
Testes com diferentes alimentadores e diferentes tensões foram feitos para validação
dos resultados do simulador. Uma primeira análise feita foi a das tensões dos nós regulados VjSim . Onde pela Tabela 5.1 se observam: Vjant (tensão anterior a uma regulação
de tensão nas três fases do nó 10, caso base); Vjdes (tensão de regulação desejada no nó
10 para as três fases); VjSim (tensão de regulação no simulador, ou seja, é a tensão de
saída dos nós regulados, calculada pelo simulador após um ajuste de tensão); VjT .M aior ,
VjT .M edia e VjT .M enor (tensão de regulação no TOpReDE, ou seja, é a tensão de saída
dos nós regulados calculada pelo TOpReDE após um ajuste de tensão). Comparando
os valores da Vjdes e VjSim nota-se que são muito próximas, levando a concluir que o
simulador gerou os resultados esperados. Uma comparação importante é a VjSim com
as VjT .M aior , VjT .M edia e VjT .M enor . Um detalhe importante desta comparação é o fato
do programa de análise de fluxo de carga (TOpReDE) não aceitar como entrada a Vjdes ,
o mesmo somente aceita como entrada um valor de tensão para a saída do regulador,
diferente do simulador, onde se tem a possibilidade de três valores distintos para os reguladores de tensão. Desse modo, houve a necessidade de passar ao programa de análise
de fluxo de carga os valores das tensões atingidas nos reguladores, Viat , porém, como a
simulação é feita com três reguladores houve a necessidade de informar o maior valor,
o menor valor e a média dos valores dos três reguladores e então analisar os resultados.
A análise feita dentre os diversos testes realizados mostrou que os valores das tensões
40
nos nós regulados Vj do TOpReDE eram muito próximas a VjSim quando a Viat era da
mesma fase da VjSim como pode ser visto na Tabela 5.1. Analisando o nó 12 (fase A),
tem-se: 0.9068 p.u para a VjSim . Para esta fase a Viat foi de 0.9630 p.u , então, esse
valor foi passado ao TOpReDE. Para este valor, a VjT .M enor foi de 0.9047 p.u que é um
valor muito próximo ao resultado obtido pelo simulador, com um erro de +0.21 %.
Os valores restantes informados na Tabela 5.1 são referentes às tensões dos nós
reguladores Vi . Um dado importante mostrado na Tabela é o Dif. Viest (diferença em
módulo da Viest e Viat ). Está diferença se dá devido às restrições nas mudanças de tap.
5.2
Análise gráfica
A análise gráfica dos resultados obtidos pelo simulador demonstra mais claramente a
comparação entre os resultados do simulador e do programa de análise de fluxo de
carga TOpReDE.
O método utilizado para análise gráfica foi a comparação entre VjSim e VjT .M aior ,
VjT .M edia e VjT .M enor para as suas devidas tensões de regulação nas três fases (A,B e
C). A diferença entre a Vjant (VJ inicial) e VjSim (VJ atual) e o cálculo do erro máximo
também serão analisados.
Os dados de entrada para esta simulação foram: regulador de tensão situado no nó
7 regulando o nó 16 em 0.90 p.u na fase A, 0.92 p.u na fase B e 0.94 p.u na fase C.
Para esta simulação foram considerados apenas 23 nós do alimentador real de 56 nós.
O valor de tensão de regulação (Viat ), informado ao programa TOpReDE, foi o menor
dentre as três fases 0.9755 p.u (valor atingido na fase A do simulador).
5.2.1
Análise gráfica na fase C
O gráfico da Figura 5.1 demonstra as tensões VjSim e VjT dos nós do alimentador após
uma regulação de tensão e o gráfico da Figura 5.2 demonstra o deslocamento nos valores
de tensão entre a Vjant (caso base, V j inicial) e a VjSim (V j atual) referentes a fase C.
41
Figura 5.1: Gráfico de comparação de tensão com TOpReDE na fase C.
Figura 5.2: Gráfico tensão inicial X tensão final na fase C.
Analisando os gráfico da Figura 5.1 é notada uma diferença considerável entre os
valores de tensão nos nós calculados pelo programa TOpReDE (VjT .M enor ) e pelo simulador de bancos trifásicos reguladores de tensão (VjSim ), onde o erro máximo entre
os perfis de tensão dos nós na fase C foi de +2, 69%. Um detalhe a ser notado no
gráfico da figura 5.1 é que o perfil de tensão do simulador (gráfico em vermelho) apenas
42
é esboçado até o nó 23 e o gráfico dos perfil de tensão do TOpReDE é esboçado até o
nó 56 que é a quantidade de nós do alimentador real utilizado. Isto ocorre também para
os gráficos das Figuras 5.3 e 5.5.
Analisando o gráfico da figura 5.2, percebe-se que não houve mudança no perfil de
tensão atual dos nós do alimentador com relação ao perfil de tensão inicial dos nós do
alimentador (sobreposição dos gráficos), isso acontece devido a não ter ocorrido, para
esta simulação, uma mudança de Tap no regulador da fase C. No nó 16 têm-se 0.94 p.u,
portanto dentro da faixa de regulação desejada.
5.2.2
Análise gráfica na fase B
Os gráficos das Figuras 5.3 e 5.4 têm os mesmos propósitos dos gráficos demonstrados
na subseção 5.2.1, no entanto com relação à fase B.
Figura 5.3: Gráfico de comparação de tensão com TOpReDE na fase B.
Analisando os gráfico da Figura 5.3 é notada uma diferença entre os valores de tensão nos nós calculados pelo programa TOpReDE (VjT .M enor ) e pelo simulador (VjSim ),
onde o erro máximo entre os perfis de tensão dos nós na fase B foi de +2, 11%. É
importante perceber que o erro máximo para fase B foi menor que o erro máximo para
a fase C, isto acontece devido ao valor de regulação de tensão (Viat ) na fase B ser de
0.9916 e o valor de regulação da fase C ser de 1 p.u., portanto, a diferença de tensão
43
Figura 5.4: Gráfico tensão inicial X tensão final na fase B.
entre o valor de tensão de regulação (B e C) com relação ao valor informado ao TOpReDE (0.9755 p.u.) é maior na fase C, então, quanto maior a diferença entre a tensão
de regulação por fase e a tensão de regulação informada ao TOpReDE maior será o erro
máximo nos resultados dos perfis de tensão obtidos.
Analisando os gráfico da Figura 5.4, percebe-se que houve diminuição no perfil de
tensão atual dos nós do alimentador com relação ao perfil de tensão inicial, isso acontece
devido a um rebaixamento de 1 degrau na posição inicial do Tap no regulador da fase
B.
Em ambos os gráficos das Figuras 5.3 e 5.4 existe uma abrupta variação imposta no
nó regulador (nó 7), os nós a montante do nó regulador não sofrem alterações nas tensões
e as tensões nos nós a jusante do nó regulador variam linearmente coma a variação
imposta no nó regulador.
5.2.3
Análise gráfica na fase A
O gráficos das Figuras 5.5 e 5.6 tem os mesmos propósitos dos gráficos demonstrados
nas subseções 5.2.1 e 5.2.2, no entanto com relação a fase A.
Finalmente, a demonstração gráfica da fase A, constata a semelhança entre os resultados gerados pelo programa de análise de fluxo de carga (TOpReDE) e pelo simulador.
A comparação entre os perfis de tensão gerados pelo simulador e pelo TOpReDE após
44
Figura 5.5: Gráfico de comparação de tensão com TOpReDE na fase A.
Figura 5.6: Gráfico tensão inicial X tensão final na fase A.
uma regulação de tensão demonstra um erro máximo de +1, 85%.
Semelhantemente ao que aconteceu na fase B, houve um rebaixamento no perfil de
tensão atual do regulador com relação ao perfil de tensão inicial, sendo que para a fase
A essa diferença foi maior devido a um deslocamento para baixo de 3 degraus no Tap.
45
Com base nas análises gráficas feitas para as três fases, conclui-se que os resultados
gerados pelo simulador são bem semelhantes aos resultados gerados pelo TOpReDE,
porém, tornam-se mais próximos aos valores gerados pelo TOpReDE quando o valor de
tensão de regulação passado ao TOpReDE para se fazer análise de resultados é a mesma
da tensão de regulação (Viat ) da fase em estudo, como pode ser visto na análise gráfica
da fase A, onde vale lembrar que o valor de regulação de tensão informado ao TOpReDE
para análise das três fases foi o valor atingido no regulador da fase A do simulador, por
isso, o erro máximo calculado na fase A foi o menor dentre as três fases.
46
Capítulo 6
Conclusões
Com o intuito de alcançar a principal proposição estabelecida para este trabalho, que
foi o desenvolvimento de um simulador para avaliar o comportamento de bancos reguladores trifásicos usados em redes de distribuição de energia elétrica, dentre as metas
a cumprir e os objetivos a alcançar, destacou-se o delineamento de toda uma trajetória
de conhecimentos envolvendo diferentes áreas da Engenharia Elétrica e Engenharia de
Computação. Primeiramente, foi necessário re-assimilar conceitos básicos de sistemas
de numeração, memórias, lógica de programação e linguagem de programação. Num
segundo momento, houve a necessidade premente de consolidar alguns conhecimentos básicos sobre sistemas de potência e novas tecnologias que dão suporte a DSP´s e
FPGA´s.
Após a etapa de consolidação de alguns conhecimentos, procurou-se vencer etapas
estabelecidas no delineamento das seções. Neste intento, e partindo do pressuposto de
que era possível definir eficazmente as tensões de regulação em um alimentador, com
base nos coeficientes das funções que definem a sensibilidade de tensão (coeficientes de
tensão) para cada nó presente no alimentador, as atenções se voltaram para estudos feitos
sobre análise de fluxo de carga, realizados em alimentadores de distribuição de energia
elétrica reais. Constatou-se que, para condições fixas de carga, uma variação na tensão
de saída de um regulador se reflete, linearmente, para todos os nós localizados a jusante
e que, para uma condição fixa de tap de um regulador e excursões de carregamento no
intervalo usual da curva de carga diária, as tensões nos nós a jusante, também variam
linearmente com a carga.
47
Dessas observações pôde-se chegar à conclusão de que era realmente possível prever e controlar a tensão em um ponto qualquer de um alimentador, a jusante de um
regulador, a partir de uma amostra da tensão de saída do regulador e dos parâmetros
de sensibilidade que definem as derivadas parciais da tensão de cada nó em relação à
tensão de saída do regulador.
Para validar o que teoricamente parecia óbvio, se descreveu um algoritmo que permitiu controlar as tensões de regulação, a partir da amostra de tensões no nó regulador,
com a tensão e com o parâmetro de sensibilidade, definidos para um nó, a jusante, o
qual, se deseja regular. No entanto sua atuação se restringia apenas a sistemas monofásicos.
Após terem sido feitos estudos sobre reguladores de tensão, regulação remota de
tensão e também ter sido desenvolvido um algoritmo para controle das tensões de regulação, partiu-se para o desenvolvimento, a implementação e os testes do simulador
de bancos trifásicos de reguladores de tensão. Em conformidade com o modelo sugerido para o simulador, apresentado no Capítulo 4, desenvolveu-se, primeiramente, um
R
sistema em Matlab/Simulink
e a biblioteca DSP Builder para fins de simulação do
comportamento de reguladores de tensão em sistemas monofásicos e, posteriormente,
desenvolveu-se o simulador de bancos reguladores de tensão para sistemas trifásicos.
O simulador comportou-se muito bem, gerando resultados bastante satisfatórios com
os diversos alimentadores testados. No entanto, como forma de validação tornava-se
necessário o estudo comparativo entre os resultados gerados pelo simulador de bancos
trifásicos de reguladores de tensão e o programa de análise de fluxo de carga, o TOpReDE, o qual pôde ser visto no Capítulo 5. Com base nas análises gráficas feita para as
três fases, conclui-se que os resultados gerados pelo simulador são bem semelhantes aos
resultados gerados pelo TOpReDE, porém, principalmente quando o valor de tensão de
regulação passado ao TOpReDE, para fazer análise de resultados é a mesma da tensão
de regulação Viat da fase em análise.
Foi verificada a eficácia das ferramentas utilizadas, em destaque a biblioteca DSP
R
builder para Matlab/Simulink
que implementa em blocos funcionais quase todas as
ferramentas utilizadas na linguagem VHDL, não sendo necessário ter conhecimento
sobre tal linguagem, pois a biblioteca DSP Builder em conjunto com o programa para
desenvolvimento de projetos, que envolvem as linguagens VHDL e Verilog, Quartus II
geram o código VHDL do projeto implementado no ambiente Simulink.
Viabilizada a implemtnação do simulador de bancos trifásicos de reguladores de
48
tensão e a utilização das ferramentas para o desenvolvimento de tal simulador, cabe
aqui, a ressalva de que a inexistência de uma bancada para testes com reguladores, em
escala laboratorial, impediu no momento, que tal simulador fosse implementado em
um dispositivo lógico programável e fossem feitos testes, envolvendo todos os blocos
constituintes, que pudessem apontar conclusivamente para a sua aplicabilidade prática
e, conseqüentemente, para uma futura implementação em escala industrial. Reforçando
a sua importância na pesquisa científica, o simulador, abre espaço e perspectivas de
trabalhos futuros, dentre os quais, pode-se citar:
• implementar o simulador nas configurações Delta ou Delta Aberto e também substituir o algoritmo de ajuste usando os parâmetros de sensibilidade entre grandezas
da rede de distribuição de energia elétrica por um programa de cálculo de fluxo
de carga, que irá possibilitar, por exemplo, gerar, com segurança, informações
sobre um novo ponto ótimo de localização do regulador de tensão ou sobre a sua
capacidade de regulação no ponto de localização atual;
• a implementação do simulador em um dispositivo lógico programável e a partir
daí fazer experimentos em uma bancada de testes que permita se avaliar, na prática, o comportamento de bancos reguladores trifásicos, após ajustes de tensão e
de carregamento.
49
Apêndice A
A interface do simulador
A Figura A.1 demonstra a implementação das três fases do simulador de bancos trifásicos de reguladores de tensão usados em distribuição elétrica. Na Figura A.1 está
bem explicito a máquina de estados (MdEcaPerfil) responsável pela temporização de
todo sistema; as memórias ROM (ROM EAB, ROM EAB1, ROM EAB2, ROM EAB3,
ROM EAB4 e ROM EAB5) que armazenam os perfis e os coeficientes de tensão nas três
fases dos nós que compoêm o alimentador; as unidades de conversão ADC; os subsistemas (F1_subsistema, F2_subsistema e F3_ subsistema) onde estão situadas as unidades
de controle de tensão (UCT´s), as unidades de ajuste de tap (UAT´s) e as unidades de
cálculo das tensões (UCAT´s). Na figura A.1 também pode ser visto os dados de entrada
do simulador bem como os diplays com os dados de saída.
A Figura A.2 demonstra a estrutura interna dos subsistemas, nela podem ser vistas
as pricipais unidades que compoêm o simulador (UCT, UAT e UCAT), as quais também
foram desenvolvidas como susbsistemas e que foram demonstradas internamente no
capítulo 4. No canto inferior direito da Figura A.2 podem ser vistos os blocos Paralell
Adder subtractor e Magnitude que calculam a diferença em módulo entre Viest e o Viat .
Os blocos To workspace são os vetores passados do simulador para o workspace do
R Eles são: nNoh (quantidade de nós do alimentador a serem analisados),
MATLAB,
nNohs (que nós do alimentador serão analisados), Vj1 (igual ao VjSim da fase A) e
VjantA (igual ao Vjant da fase A).
50
Figura A.1: Simulador do comportamento de bancos trifásicos de reguladores de tensão.
51
Figura A.2: Blocos do F1_subsistema.
52
Apêndice B
O formato Intel-HEX
O formato Intel-Hex é uma forma de representar uma seqüência de valores binários
arbitrários em formato ASCII. Isto permite a visão de um arquivo objeto com ferramentas padrões e fácil transferência de arquivos de um computador para outro. Um
registro HEX individual é uma simples linha em um arquivo composto de muitos registros HEX [6].
B.1
O conteúdo de um registro HEX
Os registros HEX são caracteres strings feitos de alguns campos que especificam o
tipo de registro, tamanho do registro, endereçamento de memória, dados e checksum.
Cada byte do dado binário é codificado como dois caracteres do número hexadecimal.
O primeiro caractere ASCII representa os quatro bits mais significativos, e o segundo
caractere representa os quatro bits menos significativos do byte. Os seis campos que
compreendem um registro HEX são definidos na Tabela B.1.
53
Tabela B.1: Descrição dos campos nos registros HEX
Campos
Caracteres Descrição
Código de início
1
Uma caractere ASCII, ":".
Contador de Byte
2
Número de caracteres pares no campo dados.
Endereçamento
4
Os dois bytes de endereçamento do campo
de dados para serem carregados dentro da
memória.
Tipo
2
Dado
0-2n
00, 01 ou 02.
de 0 a "n"bytes de código executável, ou dados
carregados na memória. "n"é normalmente
20 hex (32 decimal) ou menos.
Checksum
2
O byte menos significativo da soma dos
complementos de dois do valores representados
por todos os pares de caracteres do registro
exceto o código de inicio e checksum.
B.2
Exemplos de registro HEX
A seguir será demonstrado um módulo típico de registro HEX, que consiste de quatro
registros de dados e o registro de terminação de arquivo. Em seguida o detalhamento de
todos os pares de caracteres do primeiro registro.
:10010000214601360121470136007EFE09D2190140
:100110002146017EB7C20001FF5F16002148011988
:10012000194E79234623965778239EDA3F01B2CAA
:100130003F0156702B5E712B722B732146013421C7
:00000001FF
54
:
Código de inicio
10
hexadecimal 10 (decimal 16) , indicando 16 bytes do dado binário neste registro.
01
Campo com 2 bytes de endereço: endereço hexadecimal 0100,
00
indica a localização de onde o dado será carregado.
Os próximos 16 pares de caracteres são bytes ASCII do atual dado do programa.
40
Checksum do primeiro registro HEX.
O registro de terminação de arquivo é explicado a seguir:
:
Código de início.
00
O contador de byte é zero, não existe dado do registro de terminação.
00
Campo com 2 bytes de endereço, zeros.
00
01
Tipo 01 é terminação.
FF
Checksum do registro de terminação.
55
Referências Bibliográficas
R
[1] ALTERA.
Dsp builder user guide. Disponível em: www.altera.com, 2006.
Acessado em: setembro/2006.
R
[2] ALTERA.
Implementando sistemas dsp em fpga.
Disponível em:
http://www.picomponentes.com.br, 2006. Acessado em: setembro/2006.
R
[3] ALTERA.
Quartus ii version 6.0 handbook. Disponível em: www.altera.com,
2006. Acessado em: setembro/2006.
[4] M. T. BISHOP, J. D. FOSTER, and D. A. DOWN. Single-phase voltage regulators
and three-phase systems. Julho/Agosto 1996.
[5] José Alberto Nicolau de Oliveira. Plataforma de embarque para implementação de
funções de controle em tempo real em reguladores de tensão utilizados em redes de
distribuição de energia elétrica. Doutorado em engenharia elétrica, Universidade
Federal do Rio Grande do Norte, Natal, 2007.
[6] Intel.
Hexadecimal object file format specification.
Disponível em:
http://pages.interlog.com/ speff/usefulinfo/Hexfrmt.pdf, 1988. Acessado em: fevereiro/2007.
[7] M. F. JR MEDEIROS, I. S. SILVA, M. C. P. FILHO, M. A. ALMEIDA, J. A. N.
OLIVEIRA, and J. MENDONÇA JR. A system to simulate the behavior of distribution system voltage regulators with embedded software ip control. IEEE PES
Transmission and Distribution Conference and Exposition, Caracas - Venezuela,
2006.
[8] E. F. MOGOS and X. GUILLAUD. A voltage regulation system for distributed
generation. IEEE PES Power Systems Conference and Exposition, 2004.
56
[9] J. A. N. OLIVEIRA, M. F. JR MEDEIROS, and M. C. P. FILHO. Three-phase
models of voltage regulators for the power summation load flow. Junho/Outubro
2004.
[10] J. A. N. OLIVEIRA, M. F. MEDEIROS JR, M. C. P. FILHO, and I. S. SILVA.
Ip core for regulation voltage adjustment in electric energy distribution systems.
IP-SOC, Grenoble - França, 2005.
[11] José Eduardo Odoni Pessanha.
Apostila qualidade.
Disponível em:
http://www.dee.ufma.br/ pessanha/media/Apostila-qualidade.pdf, 2006. Acessado
em: setembro/2006.
[12] M. C. F. PIMENTEL, M. F. JR MEDEIROS, J. A. N. OLIVEIRA, and M. A. ALMEIDA. Linearização dos parâmetros de sensibilidade tensão x tensão e tensão x
carregamento para regulação remota em alimentadores de média tensão. INDUSCON, Recife - Brasil, 2006.
[13] M. C. PIMENTEL FILHO and M. F. MEDEIROS JÚNIOR. Optimal power flow
in distribution networks by newton’s optimization methods. IEEE INTERNATIONAL SYMPOSIUM ON CIRCUITS AND SYSTEMS, pages 505–509, Jun 1998.
[14] M. C. PIMENTEL FILHO and M. F. MEDEIROS JÚNIOR. Localização ótima de
bancos trifásicos de reguladores de tensão em alimentadores radiais de distribuição. CBA, pages 2066–2071, 2002.
[15] P RAHARDJO. Justification on the applications of automatic voltage regulator
and capacitor on long medium voltage distribution feeders. IEEE, 2002.
[16] J. SHI, Y. LIU, X. QUIAN, and Q. HOU. Optimal voltage regulation in distribution system. 6th International Conference on Advances in Power System Control,
Operation and Management, Hong Kong, November 2003.
57