CONTROLE DO MODELO NÃO-LINEAR DE UM MÍSSIL AR-AR: COMPARAÇÃO
ENTRE TÉCNICAS LPV
Alberto M. Simões∗, Pierre Apkarian†, Paulo C. Pellanda∗
∗
†
IME, Departamento de Engenharia Elétrica
Rio de Janeiro, Brasil
ONERA-CERT/DCSD, Departamento de Sistemas de Controle e Dinâmica de Vôo
Toulouse, França
Emails: [email protected], [email protected], [email protected]
Abstract— Different Linear Parameter-Varying (LPV) control techniques are used for the synthesis of autopilots for an air-air missile nonlinear model. The incorporation of realistic hypothesis, as bounds on the parameter
variation rate, allows to the synthesis of less conservative controllers, what is confirmed by nonlinear closed-loop
simulation results.
LPV control; gain-scheduling; parameter-dependent Lyapunov functions.
Keywords—
Resumo— Diferentes técnicas de controle Linear a Parâmetros Variáveis (LPV) são utilizadas para a sı́ntese
de pilotos automáticos para o modelo não-linear de um mı́ssil ar-ar. A incorporação de hipóteses realistas, como
limites sobre a taxa de variação do parâmetro, permite a sı́ntese de controladores menos conservadores, o que é
confirmado pelos resultados das simulações não-lineares em malha fechada.
Palavras-chave—
1
controle LPV; escalonamento de ganho; função de Lyapunov dependente de parâmetro.
Introdução
A sı́ntese de pilotos automáticos para mı́sseis continua sendo uma tarefa desafiadora por vários motivos. Em primeiro lugar, especificações rigorosas
de projeto são normalmente requeridas para uma
larga faixa de condições de vôo. Além disso, requisitos de robustez em estabilidade e em desempenho precisam ser geralmente expressos no domı́nio da freqüência em termos de normas H2 e/ou
H∞ , o que constrasta com a natureza não-linear
e não-estacionária do sistema. Por isso, esse problema tem sido abordado pelo uso de diferentes
técnicas de escalonamento de ganhos convencionais (ou clássicas) (REICHERT, 1992; SCHUMACHER e KHARGONEKAR, 1998; STILWELL e
RUGH, 1999) e LPV (Linear a Parâmetros Variáveis) (TAN et al., 2000; HIRET et al., 2001; PELLANDA et al., 2002; FARRET et al., 2002).
As técnicas clássicas de escalonamento de ganhos apoiam-se sobre uma estratégia do tipo dividir para conquistar. No processo de sı́ntese do
controlador interpolado, o primeiro passo é linearizar o modelo da planta em vários pontos de operação. O segundo passo é sintetizar controladores
Lineares Invariantes no Tempo (LTI) para cada
um desses pontos. Para isso, o projetista dispõe
de um número grande de técnicas de controle LTI,
incluindo controle ótimo e robusto. Por último,
basta definir uma lei de transição entre os controladores LTI de acordo com a evolução da planta
não-linear pelos diversos pontos de operação considerados, tal que o desempenho não-linear em malha fechada seja tão próximo quanto possı́vel do
desempenho linear estacionário projetado.
Por outro lado, as técnicas LPV representam
extensões para a classe de sistemas LPV das técnicas LTI de controle H2 e H∞ . Elas podem ser aplicadas em problemas de controle não-linear uma
vez que uma grande classe de sistemas não-lineares
pode ser reformulada como sistemas LPV.
Embora a filosofia de controle seja semelhante
para as duas grandes classes de técnicas de escalonamento de ganhos (ambas pressupõem disponı́vel
em tempo real a medida do parâmetro que determina o ponto de operação do sistema), as técnicas
LPV oferecem garantias de estabilidade e desempenho para toda a faixa de operação especificada,
o que não acontece para os métodos clássicos.
As várias técnicas LPV diferem entre si basicamente devido às hipóteses assumidas sobre o
modelo LPV utilizado e à função de Lyapunov
adotada. Via de regra, as sı́nteses que incorporam hipóteses mais realistas geram controladores
menos conservadores, ao preço da sı́ntese e da operação do controlador serem mais custosas computacionalmente.
Na Seção 2, são apresentados, de forma resumida, os fundamentos de dois métodos LPV recentemente desenvolvidos. Na Seção 3, eles são
aplicados no problema realı́stico de controle de
um modelo de mı́ssil ar-ar e comparados com outras técnicas LPV tradicionalmente utilizadas e
disponı́veis na literatura.
2
Técnicas de Controle LPV
Seja a planta LPV descrita por
ẋ(t) = A(θ(t))x(t) + B(θ(t))u(t)
y(t) = C(θ(t))x(t) + D(θ(t))u(t),
(1)
onde A ∈ Rn×n , D ∈ Rp×m e o parâmetro θ(t) varia continuamente no tempo dentro de um domı́nio paramétrico compacto PΘ . No controle LPV,
o controlador também é um sistema LPV atualizado por θ(t) que é medido on-line:
ẋK (t)
u(t)
= AK (θ(t))xK (t) + BK (θ(t))y(t)
= CK (θ(t))xK (t) + DK (θ(t))y(t),
(2)
onde AK ∈ Rn×n .
2.1
Lyapunov dependentes do parâmetro. As variáveis matriciais de Lyapunov X(θ) e Y (θ) são construı́das pela interpolação de coeficientes matriciais
sobre intervalos de interpolação constituı́ndo uma
malha de interpolação sobre o espaço paramétrico.
Para o caso bi-dimensional, as variáveis de
Lyapunov são definidas em cada intervalo de interpolação segundo
X(θ)
:=
(1 − θ2 ) [(1 − θ1 )X1 + θ1 X2 ]
+θ2 [(1 − θ1 )X3 + θ1 X4 ]
+(1 − θ1 )θ1 [(1 − θ2 )X1s + θ2 X2s ]
+(1 − θ2 )θ2 [(1 − θ1 )X3s + θ1 X4s ]
+(1 − θ2 )θ2 (1 − θ1 )θ1 Xts ,
Y (θ)
:=
(1 − θ2 ) [(1 − θ1 )Y1 + θ1 Y2 ]
+θ2 [(1 − θ1 )Y3 + θ1 Y4 ]
+(1 − θ1 )θ1 [(1 − θ2 )Y1s + θ2 Y2s ]
+(1 − θ2 )θ2 [(1 − θ1 )Y3s + θ1 Y4s ]
+(1 − θ2 )θ2 (1 − θ1 )θ1 Yts ,
Controle H∞ /LPV com função de Lyapunov
dependente do parâmetro continuamente diferenciável por partes
A sı́ntese H∞ /LPV apresentada em APKARIAN
e ADAMS (1998) permite que a planta possua
uma dependência paramétrica geral e que se incorpore limites sobre a taxa de variação do parâmetro. As Desigualdades Matriciais Lineares Parametrizadas (PLMI) de sı́ntese são obtidas pela
utilização de uma função de Lyapunov quadrática dependente do parâmetro da forma V (x, θ) :=
xT P (θ)x, onde a matriz P (θ) é particionada segundo
·
¸·
¸−1
X(θ) I
I
Y (θ)
P (θ) :=
. (3)
N T (θ) 0
0 M T (θ)
A utilização de uma função de Lyapunov dependente do parâmetro, V (x, θ), permite incorporar à sı́ntese limites sobre a taxa de variação,
θ̇, do parâmetro, tornando-a menos conservadora.
Cria-se, entretanto, o inconveniente de que o controlador precisa ser atualizado também segundo
esta taxa, a qual geralmente não está disponı́vel
para ser medida ou não pode ser estimada.
Um mecanismo utilizado para contornar esse
problema é supor que uma das duas variáveis de
Lyapunov, X ou Y em (3), seja constante em relação ao parâmetro θ. Conquanto isso permite a
obtenção de controladores de validade prática e
que ainda assim se incorpore limites sobre a taxa
de variação do parâmetro, essa restrição é uma
fonte conhecida de conservadorismo. O caso em
que ambas as variáveis X e Y são constantes representa a situação mais conservadora, e está associada à hipótese de taxa de variação ilimitada
do parâmetro.
Não existe um procedimento geral para a determinação de uma dependência paramétrica para
as variáveis de Lyapunov. Um procedimento comumente adotado é construir uma dependência
paramétrica que reproduza caracterı́sticas do sistema. Além disso, o problema da dimensão infinita associada às PLMI é contornado pela utilização da técnica de partição (gridding) do espaço
paramétrico.
Contudo, a utilização de uma função de
Lyapunov continuamente diferenciável por partes
(PELLANDA et al., 2004) representa uma maneira sistemática e simples de construir funções de
(4)
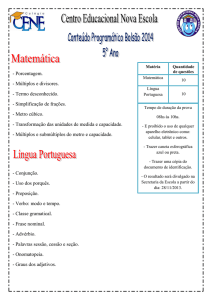
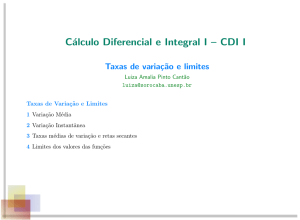
onde:
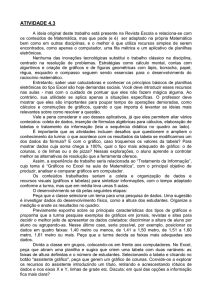
• θ1 (t) e θ2 (t) ∈ [0, 1], ∀t ≥ 0 e para cada subintervalo de interpolação;
• (Xi , Yi ), i = 1, ..., 4, são as variáveis de Lyapunov (a interpolar) para os vértices Θi ∈
{[0, 0]T , [1, 0]T , [0, 1]T , [1, 1]T } ;
• (Xis , Yis ), i = 1, ..., 4, são as variáveis suplementares para as interpolações nas direções
de θ1 e θ2 , nas fronteiras dos sub-intervalos;
• (Xts , Yts ) é um grau de liberdade suplementar
para a interpolação bi-dimensional, no interior dos sub-intervalos.
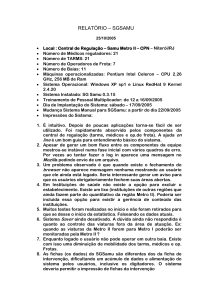
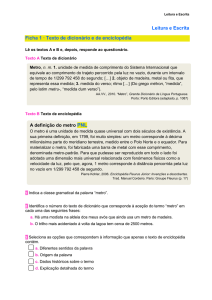
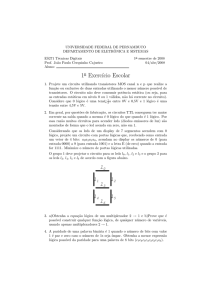
As Figuras 1 e 2 ilustram as regiões de influência
de cada coeficiente matricial para um dado subintervalo de interpolação normalizado.
θ2
1
Direção
de
influência
máxima para influência
nula da variável Z
Z
X3
X3s
0
X4
X2s
Xts
X4s
X1s
X1
0
X2
1
θ1
Figura 1: Influência dos coeficientes matriciais interpolados para um intervalo normalizado.
3
Controle de um mı́ssil ar-ar
Influência (%)
100
3.1
80
60
40
20
0
1
0.5
θ2
0
0
0.2
0.4
0.6
0.8
1
θ1
Figura 2: Influência dos coeficientes matriciais interpolados - vista tridimensional.
O fato de as variáveis de Lyapunov interpoladas serem continuamente diferenciáveis por partes, e, portanto, descontı́nuas para derivada do
parâmetro, não representa problema para a continuidade do controlador LPV. De fato, para o controlador ser válido praticamente, sua dependência
para com a derivada do parâmetro precisa ser eliminada, o que permite a utilização de função de
Lyapunov continuamente diferenciável por partes.
A utilização de variáveis interpoladas oferece
a flexibilidade de que nı́veis mais rigorosos de desempenho podem ser obtidos pela utilização de
uma malha de interpolação mais densa. Obviamente, o aumento da malha de interpolação acarreta um aumento no esforço computacional.
2.2
Controle LPV/LFT
Quando a planta LPV assume a representação associada a uma Transformação Linear Fracionária
(LFT), a adoção de um controlador LPV também
do tipo LFT é interessante por transformar o problema em um problema de dimensão finita, de
modo que as restrições do tipo PLMI do problema
H∞ podem ser substituı́das por restrições do tipo
LMI (PACKARD, 1994; APKARIAN e GAHINET, 1995).
A abordagem LFT está associada ao uso de
função de Lyapunov independente do parâmetro.
Assim, implicitamente a sı́ntese LPV/LFT considera taxa de variação do parâmetro ilimitada, o
que se espera ser uma fonte importante de conservadorismo.
Em (APKARIAN et al., 2000) foram derivadas caracterizações LMI menos conservadoras
para a sı́ntese H2 /H∞ multi-canal para plantas
LPV discretas. Esta sı́ntese também pode ser utilizada para plantas contı́nuas por meio da discretização da planta LPV. A formulação do problema
como uma otimização multi-objetivo/multi-canal
fornece flexibilidade adicional para a obtenção de
nı́veis mais estritos de desempenho.
Definição do problema
O problema consiste em controlar o mı́ssil para
que este acompanhe uma aceleração normal ηc (t)
de referência, gerando-se uma deflexão do profundor δc (t) comandada. O modelo não-linear do mı́ssil e a dinâmica do atuador são emprestadas de
(REICHERT, 1992; NICHOLS et al., 1993), onde
os valores dos coeficientes numéricos podem ser
encontrados.
O modelo do eixo de elevação do mı́ssil envolve o ângulo de ataque α(t) (em ◦ ), a velocidade angular em arfagem q(t) (em ◦ /s), o ângulo
do profundor δ(t) (em ◦ ) e sua derivada δ̇(t) (em
◦
/s). A aceleração normal vertical η(t) (em g)
e a velocidade angular em arfagem são as saı́das
medidas. Uma descrição quasi-LPV do modelo
não-linear do mı́ssil e do atuador é dada por
Zα 1
α̇
q̇ Mα 0
=
0 0
δ̇
0 0
δ̈
·
· ¸
Nα
η
=
0
q
0
Zδ
0
α
Mδ
0 q 0
+ δc
0
0
1
δ
−ωa2 −2ζωa δ̇ ωa2
¸ α
0 Nδ 0 q
, onde
1 0 0
δ
δ̇
(5)
¡
¢
Zα = Kα M cos α an α2 + bn |α| + cn (2 − M/3)
Zδ = Kα M cos
¡ α dn
¢
Mα = Kq M 2 am α2 + bm |α| + cm (−7 + 8M/3)
Mδ = Kq M 2 d¡m
¢
Nα = Kz M 2 an α2 + bn |α| + cn (2 − M/3)
Nδ = K z M 2 d n
A descrição acima representa um mı́ssil
voando a uma altitude de 20000 ft. É suposto
verdadeiro o desacoplamento dos eixos de rumo e
de rolagem.
A dinâmica da planta pode ser parametrizada
por α(t) e M (t), sendo o número de Mach M (t)
considerado como uma variável exógena. Devido
à simetria do mı́ssil em torno de α = 0, controladores são projetados para α ≥ 0 e interpolados
em |α(t)| e M (t), ou θ(t) = [|α(t)|, M (t)]T .
Para simulações não-lineares e nãoestacionárias, a trajetória temporal do número de
Mach é gerada por
Ṁ =
¤
1 £
−|η| sin(|α|) + Ax M 2 cos(α)
vs
(6)
com M (0) = 4 como um perfil realista, como em
(NICHOLS et al., 1993; WU et al., 1995).
As especificações de desempenho e robustez para o sistema em malha fechada são similares àquelas detalhadas em (NICHOLS et al.,
1993; WU et al., 1995) e também usadas em
(PELLANDA et al., 2002). O objetivo é manter a estabilidade sobre toda a faixa de operação,
Piloto Automático
Wi(s)
+
_
zu
ze
zu
We(s)
Wu(s)
We(s)
Wu(s)
1 s 0
0 −1
K(s,θ)
W(s)
δc
Piloto Automático
G0(s,θ)
q
Míssil
Μ
η
Wi(s)
+
_
1 s 0
0 −1
W(s)
α ∈ [−30, 30] graus e M ∈ [2, 4], e acompanhar comandos em degrau em ηc com constante de tempo
não maior do que 0.35 s, ultrapassagem máxima
de 10%, erro em estado estacionário menor do
que 1% e um roll-off adequado para atenuação
de ruı́dos e robustez a incertezas (dinâmicas de
alta freqüência e modos flexı́veis não-modelados).
Para evitar a saturação do atuador, a máxima
taxa de variação do ângulo do profundor para um
comando em degrau de 1g em ηc não pode exceder
25 ◦ /s.
Experimentos numéricos indicaram que, para
sistemas em malha fechada satisfazendo essas especificações de desempenho para um conjunto rico
de trajetórias potenciais, limites inferior e superior razoáveis para derivadas dos parâmetro são
−180 ◦ /s ≤ α̇ ≤ 180 ◦ /s e −1 ≤ Ṁ ≤ 0. Estes
foram os valores considerados neste trabalho.
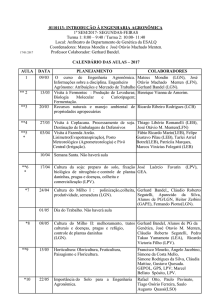
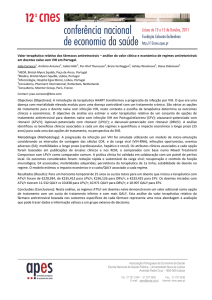
A estrutura de controle em malha fechada
adotada para o uso das técnicas descritas na
Seção 2.1 é mostrada na Figura 3. Os objetivos de desempenho são expressos pela escolha de
funções peso apropriadas. O pré-compensador
Wi (s) é usado para bloquear variações rápidas
do sinal de comando, evitando a saturação do
atuador. As funções de peso W (s) e We (s) :=
diag(We0 (s), 0.01) penalizam o erro de referência e
Wu (s) incorpora limites para a normas das dinâmicas não-modeladas e também reflete restrições
de magnitude sobre o sinal de controle. Assim, a
estratégia de sı́ntese é minimizar a norma H∞ do
canal de desempenho Tzw com entrada w = ηc e
T
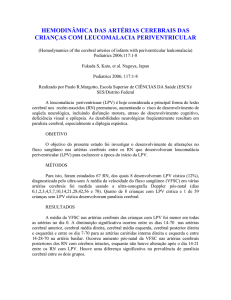
saı́da z = [ zeT zu ] . A Figura 4 mostra a estrutura
de controle para os controladores LPV/LFT. As
funções peso são as mesmas utilizadas em PELLANDA et al. (2004).
Resultados e Simulações
Inicialmente, são sintetizados controladores LPV
com função de Lyapunov continuamente diferenciável por partes. A Tabela 1 mostra os diferentes
ganhos L2 em malha fechada, γ, garantidos por
esses controladores, os quais são interpolados em
M e consideram |α| constante (|α| = 15◦ ).
O limitante inferior para γ é o maior valor de
w∆
∆(θ )
δc
K(s)
G∆(s)
zΚ
wΚ
∆Κ(θ)
α
Figura 3: Estrutura de controle LPV para o mı́ssil.
3.2
ηc
z∆
q
Míssil
α
Μ
Figura 4: Estrutura de controle LPV/LFT para o
mı́ssil.
9
8
−ρ < dM/dt <0
| dM/dt | < ρ
7
6
γ
ηc
ze
5
4
3
2 −1
10
0
10
1
10
2
10
3
10
limite ρ da taxa de variação (s−1)
4
10
Figura 5: Desempenho γ obtido em função do limite adotado para a taxa de variação do parâmetro M .
norma H∞ garantido dentre todos os controladores LTI sintetizados em cada ponto do espaço paramétrico (2,81, neste caso). O controlador K1 é
o mais conservador, o que pode ser explicado pelo
fato dele considerar ambas as variáveis de Lyapunov constantes, o que corresponde à hipótese de
taxa de variação ilimitada do parâmetro. Ambos
os controladores K2 e K3 incorporam limites sobre a taxa de variação do parâmetro. Contudo,
surpreendemente neste problema, a dependência
do parâmetro pela variável X não representa um
desempenho melhor, o que é confirmado pelo valor de γ para o controlador K4 . O controlador K5
utiliza dois intervalos de interpolação, indicando
que o enriquecimento da função de interpolação
pode garantir nı́veis mais estritos de desempenho,
obviamente subordinados ao limitante inferior.
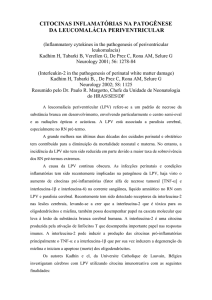
A Figura 5 mostra os valores de γ obtidos
variando-se o limite adotado na sı́ntese para a taxa
de variação do parâmetro. O limite −1 < Ṁ < 0 é
mais realista, pois a velocidade do mı́ssil é sempre
decrescente, e os valores para γ menores obtidos
confirmam a importância de se incorporar limites
realistas na sı́ntese.
A Figura 6 mostra a simulação não-linear e
η
Tabela 1: Desempenhos H∞ para os controladores
com θ = M (t) e |α| = 15◦
Estratégia
X, Y
X(θ), Y
X, Y (θ)
X(θ), Y (θ)
X, Y (θ)
LTI
γ
8.39
8.39
2.90
2.90
2.86
2.81
Comandado
K9
K8
K7
30
Intervalos
1
1
1
1
2
−
20
10
η (g)
Contr.
K1
K2
K3
K4
K5
−
40
0
−10
−20
−30
não-estacionária com o controlador K3 fechando
a malha. O sinal de entrada adotado (aceleração
comandada ηc ) para as simulações é uma seqüência de degraus cujas amplitudes foram escolhidas
de forma que o parâmetro θ cubra a maior parte da
faixa de variação, induzindo, assim, alterações significantes nos coeficientes aerodinâmicos. A fraca
resposta temporal pode ser explicada pelo fato de
que o controlador LPV foi sintetizado com a hipótese de que o ângulo de ataque α fosse constante,
o que não se observa na simulação na prática.
40
Comandado
K3
30
20
−40
0
1
2
3
4
5
6
7
8
9
10
Tempo (s)
Figura 7: Simulação não-linear em malha fechada
utilizando K7 , K8 e K9 para M variante no tempo.
Tabela 2: Desempenho H∞ para os controladores
com θ(t) = [|α(t)|, M (t)]T
Contr.
K6
K7
K8
K9
−
Estratégia
LFT H2 /H∞
LFT H∞
X, Y
X, Y (θ)
LTI
γ
54.47
28.39
6.00
3.40
η (g)
10
0
−10
−20
−30
−40
0
1
2
3
4
5
6
7
8
9
10
8
9
10
Tempo (s)
(a) - Aceleração, η(t)
4
3.8
3.6
3.4
M
3.2
3
2.8
2.6
2.4
2.2
2
0
1
2
3
4
5
6
7
Tempo (s)
(b) - Número de Mach, M (t)
Figura 6: Simulação não-linear em malha fechada
utilizando K3 para M variante no tempo.
O outro grupo de controladores LPV sintetizados considera o problema bi-dimensional, sendo
atualizados por |α| e por M . Para esse problema
são sintetizados controladores LPV utilizando as
diferentes técnicas da Seção 2. A Tabela 2 mostra
os diferentes ganhos L2 em malha fechada garantidos pelos controladores LPV.
O controlador K9 utiliza variável de Lyapunov dependente do parâmetro continuamente diferenciável por partes com um único intervalo
de interpolação, enquanto que o controlador K8
(APKARIAN e ADAMS, 1998) utiliza variáveis
de Lyapunov independentes do parâmetro. Ambos utilizam a estrutura da Figura 3 com um
único canal H∞ , Tzw . O controlador LPV/LFT
K7 (PACKARD, 1994) utiliza o mesmo canal H∞
com a estrutura da Figura 4. O controlador K6 é
a reprodução do sintetizado em PELLANDA et al.
(2002) pela técnica LFT H2 /H∞ multi-canal.
A Figura 7 mostra o desempenho dos controladores K7 , K8 e K9 em uma simulação não-linear
e não-estacionária. A entrada é a mesma da Figura 6. O maior conservadorismo dos controladores K7 e K8 indicado pela Tabela 2, pois consideram taxa ilimitada de variação do parâmetro,
é refletido em seus fracos desempenhos temporais.
A incorporação de limites realistas sobre a taxa de
variação do parâmetro permite que o controlador
K9 atenda às especificações de projeto para toda
a faixa de operação especificada.
A Figura 8 mostra a simulação não-linear com
os controladores K6 e K9 , sendo as respostas em
malha fechada muito semelhantes. De fato, a utilização de função de Lyapunov dependente do parâmetro permite que se compense a restrição de se
APKARIAN, P., PELLANDA, P. e TUAN, H.
(2000). Mixed H2 /H∞ multi-channel linear
parameter-varying control in discrete time,
System & Control Letters 41: 333–346.
40
Comandado
K
9
K6
30
20
η (g)
10
FARRET, D., DUC, G. e HARCAUT, J. (2002).
Multirate LPV synthesis: a loop-shaping approach for missile control, in Proc. Amer.
Contr. Conf. 5: 4092–4097.
0
−10
−20
−30
−40
0
1
2
3
4
5
6
7
8
9
10
Tempo (s)
Figura 8: Simulação não-linear em malha fechada
utilizando K6 e K9 para M variante no tempo.
utilizar apenas um canal H∞ .
4
Conclusão
Foi discutida a aplicação de diferentes técnicas
LPV para o controle do modelo não-linear de um
mı́ssil ar-ar. Uma larga faixa de condições de operação em ambos ângulo de ataque e número de
Mach foi considerada, e os resultados apresentados
pelos diferentes controladores foram comparados.
Considera-se que o controlador LPV sintetizado
com a técnica e a estratégia criteriosamente escolhidas é uma boa opção para o controle de sistemas
não-lineares com representação quasi-LPV.
A incorporação de limites sobre a taxa de
variação do parâmetro através da utilização de
funções de Lyapunov dependentes do parâmetro
de fato permite a sı́ntese de controladores menos
conservadores do que os produzidos pelas técnicas
que assumem taxa de variação ilimitada do parâmetro, exceto a do tipo multi-objetivo/canal.
O uso de funções de Lyapunov dependentes do
parâmetro continuamente diferenciáveis por partes em conjunção com uma técnica LPV geral de
partição do espaço paramétrico representa uma
maneira sistemática e flexı́vel de se obter controladores menos conservadores com nı́veis estritos de
ganho L2 em malha fechada.
HIRET, A., DUC, G., FRIANG, J. e FARRET,
D. (2001). Linear-parameter-varying/loopshaping H-infinity synthesis for a missile autopilot, AIAA J. Guidance, Contr., and Dynamics 24(5): 879–886.
NICHOLS, R. A., REICHERT, R. T. e RUGH,
W. J. (1993). Gain scheduling for H∞
controllers: a flight control example, IEEE
Trans. Contr. Syst. Technology (2): 69–79.
PACKARD, A. (1994). Gain-scheduling via linear
fractional transformations, System & Control
Letters 22: 79–82.
PELLANDA, P., APKARIAN, P. e TUAN, H.
(2002). Missile autopilot design via a multichannel LFT/LPV control method, Int J.
Robust and Nonlinear Control 12(1): 1–20.
PELLANDA, P., SIMÕES, A., APKARIAN, P. e
ALAZARD, D. (2004). Synthesis of missile
gain-scheduled autopilots using an H∞ -LPV
technique with piecewise continuously differentiable parameter-dependent Lyapunov
functions, Journal of Nonlinear Studies, Special Issue on Control in Defense Systems
11(2): 243–276.
REICHERT, R. (1992). Dynamic scheduling
of modern-robust-control autopilot designs
for missiles, IEEE Contr. Syst. Magazine
(5): 35–42.
SCHUMACHER, C. e KHARGONEKAR, P.
(1998). Missile autopilot designs using H∞
control with gain scheduling and dynamic inversion, AIAA J. Guidance, Contr., and Dynamics 21(2): 234–243.
Referências
STILWELL, D. e RUGH, W. (1999). Interpolation of observer state feedback controllers
for gain scheduling, IEEE Trans. Automat.
Contr. 44(6): 1225–1229.
APKARIAN, P. e ADAMS, R. (1998). Advanced
gain-scheduling techniques for uncertain systems, IEEE Trans. Contr. Syst. Technology
(6): 21–32.
TAN, W., PACKARD, A. e BALAS, G. (2000).
Quasi-LPV modeling and LPV control of a
generic missile, in Proc. Amer. Contr. Conf.,
Chicago, Illinois pp. 3692–3696.
APKARIAN, P. e GAHINET, P. (1995). A convex characterization of gain-scheduled H∞
controllers, IEEE Trans. Automat. Contr.
40(5): 853–864.
WU, F., PACKARD, A. e BALAS, G. (1995).
LPV control design for pitch-axis missile
autopilots, in Proc. IEEE Conf. Decision
Contr., New Orleans, LA (1): 188–193.