Universidade de Coimbra
Faculdade de Ciências e Tecnologias
Departamento de Física
*Modelos dos Processos Fisiológicos no Homem*
Mecânica Muscular
Trabalho Realizado por:
Ana Raquel Saiote
Áurea Alexandra Matias
Gilberto Serrano de Almeida
Helena Catarina Pereira
Índice
Introdução .......................................................................................................... 3
1. O Músculo do Ponto de Vista Fisiológico ....................................................... 4
1.1 Características gerais do funcionamento do músculo .............................. 4
1.2 Músculo Esquelético – Estrutura .............................................................. 8
1.2.1 Tecido Conjuntivo .............................................................................. 8
1.2.2 Fibras Musculares .............................................................................. 9
1.2.3 Sarcómeros...................................................................................... 11
1.2.4 Miofilamentos de Actina e Miosina ................................................... 12
1.2.5 Túbulos T e o retículo sarcoplasmático............................................ 13
1.3 Contracção Muscular .............................................................................. 15
1.3.1 Tipos de Contracção Muscular......................................................... 16
1.3.2 O Ciclo das Pontes Cruzadas .......................................................... 16
2. Análise Quantitativa da Contracção Muscular.............................................. 18
2.1 Comportamento Microscópico – Dinâmica das Pontes Cruzadas .......... 18
2.1.1 Algumas Considerações .................................................................. 18
2.1.2 Implementação do Programa em MATLAB...................................... 19
2.1.3 Interpretação do Programa .............................................................. 22
2.1.4 Resultados e Discussão................................................................... 26
2.2 Comportamento Macroscópico ............................................................... 28
2.2.1 Balanço humano de um pêndulo invertido: Será o tamanho da
oscilação controlada pela impedância do tornozelo?................................ 28
2.2.2 Implementação do Modelo no Simulink............................................ 30
Conclusão ........................................................................................................ 32
Bibliografia........................................................................................................ 33
APÊNDICE A....................................................................................................... I
Mecânica Muscular
Introdução
Introdução
As células musculares funcionam de modo a produzir
forças
responsáveis pelo movimento do corpo, sendo a sua actividade coordenada
pelo sistema nervoso de modo a que o tónus muscular e os movimentos
coordenados do corpo sejam possíveis.
O tecido muscular é altamente especializado de modo a permitir a
contracção ou encurtamento forçado. É ele o responsável pelos processos
mecânicos do corpo.
Há três tipos de tecido muscular: esquelético, liso e cardíaco. Neste
trabalho focaremos mais em particular o tecido muscular esquelético.
Após uma breve apresentação do tecido muscular do ponto de vista
fisiológico/anatómico analisaremos quantitativamente alguns comportamentos
do músculo, tendo como apoio o MATLAB e o SIMULINK.
Maio 2005
Modelos dos Processos Fisiológicos no Homem
3
Mecânica Muscular
Ponto de Vista Fisiológico
1. O Músculo do Ponto de Vista Fisiológico
1.1 Características gerais do funcionamento do músculo
O músculo é um tecido formado por um conjunto de células
especializadas capazes, graças à sua contracção e relaxação, de criar
movimento tanto do próprio corpo em relação ao ambiente que o cerca, como
dos órgãos entre si e dentro dele.
O músculo tem quatro características funcionais fundamentais:
a) Contractilidade: Designa a capacidade que o músculo tem de se contrair.
b) Excitabilidade: O músculo responde à estimulação pelos nervos ou
hormonas.
c) Expansibilidade: O músculo pode ser estirado até ao seu normal
comprimento em repouso e em dado grau para lá desse comprimento.
d) Elasticidade: Se os músculos forem estirados, retornam ao seu comprimento
em repouso original.
Durante a contracção, o músculo encurta voluntariamente mas o
alongamento é passivo. Quando se contraem, os músculos movem as
estruturas a que estão ligados, mas o movimento oposto exige uma força
antagonista e esta é produzida por um outro músculo, pela gravidade ou pela
força de um líquido que enche um órgão oco.
Os músculos esqueléticos são constituídos por grupos de fibras
musculares num arranjo ordenado. Um músculo pequeno pode ser constituído
apenas por poucos feixes de fibras, enquanto os músculos maiores do corpo
(como, por exemplo, o grande glúteo, que forma o relevo das nádegas) são
constituídos por centenas de feixes. Por sua vez, as fibras musculares são
formadas por unidades longitudinais ainda mais pequenas chamadas as
miofibrilhas, cujas unidades básicas de funcionamento são filamentos
microscópicos de actina e miosina (duas proteínas que comandam a
contracção).
O movimento dos músculos esqueléticos encontra-se sob o controle
voluntário do cérebro. Cada fibra muscular é provida de uma terminação
nervosa que recebe os impulsos vindos do cérebro. Os impulsos nervosos
Maio 2005
Modelos dos Processos Fisiológicos no Homem
4
Mecânica Muscular
Ponto de Vista Fisiológico
estimulam o músculo por meio da libertação da acetilcolina, que é um tipo de
neurotransmissor. Tal dá início a uma cadeia de fenómenos químicos e
eléctricos, em que estão envolvidos os iões de sódio, potássio e cálcio, donde
resulta que os filamentos de miosina deslizam sobre os de actina. Este
movimento dos filamentos de miosina sobre os de actina faz que o músculo se
contraia e, portanto, se encurte.
Cada músculo contém um dispositivo receptor formado por fibras
nervosas especializadas que registam a força de contracção; outro dispositivo
com sede no tendão mede a distensão. A informação recebida por estas fibras
é transmitida ao cérebro, o que é vital para dosear a acção muscular.
O músculo esquelético mantém-se num estado de contracção parcial, a
que se chama tónus muscular. A espasticidade é uma forma de tónus muscular
anormalmente aumentado.
A actividade do músculo esquelético pode ser afectada por alterações
na composição química do líquido que se encontra nos espaços entre as
células musculares. Uma descida dos iões de potássio causa uma fraqueza
muscular; uma diminuição dos iões de cálcio provoca espasmos musculares.
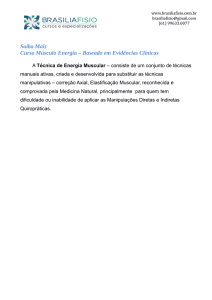
Figura 1 – MÚSCULO ESQUELÉTICO
O músculo liso está relacionado com os movimentos intrínsecos dos
órgãos internos, como o peristaltismo intestinal e as contracções do útero
durante o parto. Muitas outras partes do organismo, como os brônquios, a
bexiga e as paredes dos vasos sanguíneos, contêm também músculos lisos.
O músculo liso é constituído por células fusiformes e compridas. Na
maior parte dos órgãos ocos, estas células estão dispostas em duas camadas
de feixes com organizações distintas: uma camada longitudinal, exterior, e uma
camada circular interior. Contudo, o mecanismo da contracção assenta na
Maio 2005
Modelos dos Processos Fisiológicos no Homem
5
Mecânica Muscular
Ponto de Vista Fisiológico
mesma acção de escorregamento entre a actina e a miosina, como vimos no
músculo estriado, ou esquelético.
A inervação distribuída ao músculo liso provém do sistema nervoso
autónomo, o qual não se encontra sob o controle da nossa consciência. Daí
designar-se também por músculo involuntário. Os nervos que provêm do
sistema nervoso autónomo penetram no músculo, onde se dividem em muitas
ramificações. A libertação do neurotransmissor por estas terminações nervosas
inicia o processo que conduz à contracção.
Da mesma forma que responde aos neurotransmissores, o músculo liso
responde também a várias hormonas, a um estímulo mecânico (como o
estiramento de uma fibra muscular) e aos desequilíbrios na composição
química do fluido intercelular (por exemplo, alterações do equilíbrio ácidobase).
Figura 2 – MÙSCULO LISO
O músculo cardíaco, também chamado miocárdio, encontra-se
unicamente no coração; tem propriedades insólitas que lhe permitem contrairse ritmicamente cerca de 100 000 vezes por dia para bombear o sangue
através do sistema circulatório. O aspecto tecidual do miocárdio assemelha-se
ao do músculo estriado.
Maio 2005
Modelos dos Processos Fisiológicos no Homem
6
Mecânica Muscular
Ponto de Vista Fisiológico
A contracção do músculo cardíaco obedece a estímulos desencadeados
pelo sistema nervoso autónomo, por hormonas ou pelo estiramento das suas
fibras musculares.
Para funcionar como uma bomba eficiente, os músculos do coração
devem contrair-se de uma forma rítmica e concatenada. Cada fibra muscular
está unida a outras pelas extremidades, percorrendo em cadeia áreas
acidentadas,
o
que
permite
que
as
contracções
sejam
transmitidas
rapidamente de uma fibra para a outra.
O estímulo para a contracção do miocárdio inicia-se numa pequena área
situada na aurícula direita (denominada nódulo sinusal), que comanda um ritmo
de contracção regular. Há células no miocárdio especializadas na condução
que formam uma rede capaz de transmitir os impulsos nervosos através das
fibras do músculo cardíaco, desencadeando a contracção em ambas as
aurículas e depois em ambos os ventrículos alternadamente.
Figura 3 – MÚSCULO CARDÍACO
Maio 2005
Modelos dos Processos Fisiológicos no Homem
7
Mecânica Muscular
Ponto de Vista Fisiológico
1.2 Músculo Esquelético – Estrutura
Os músculos esqueléticos compõem-se de fibras musculares
esqueléticas associadas a pequenas quantidades de tecido conjuntivo, vasos
sanguíneos e nervos. As fibras musculares desenvolvem-se a partir de células
multinucleadas
chamadas
mioblastos.
Estes
convertem-se
em
fibras
musculares quando as proteínas contrácteis se acumulam no seu citoplasma.
Pouco após a formação dos mioblastos, os nervos crescem para dentro
da zona onde aqueles se formam e inervam as fibras musculares em
desenvolvimento.
O
número
de
fibras
musculares
esqueléticas
mantém-se
aproximadamente constante após o nascimento (A hipertrofia dos músculos
resulta de um aumento das células musculares) e têm comprimentos que vão
de 1 a 40nm e diâmetros de 10 a 100nm. Todas as fibras musculares de um
mesmo músculo têm dimensões similares.
1.2.1 Tecido Conjuntivo
Envolvendo cada fibra muscular existe uma lâmina externa composta
essencialmente por fibras reticulares. Esta lâmina externa é produzida pela
fibra muscular e, quando observada ao microscópio óptico, não se consegue
distinguir da membrana celular da fibra muscular, o sarcolema. O endomísio
(rede de tecido conjuntivo laxo com muitas fibras reticulares) envolve cada fibra
muscular por fora da lâmina externa. Cada feixe de fibras musculares com o
seu endomísio é envolvido pelo perimísio (outra camada de tecido conjuntivo)
formando-se assim o denominado feixe muscular.
Um músculo é constituído por muitos feixes agrupados e rodeados por
tecido conjuntivo mais denso, fibroso e colagénico – o epimísio – que cobre
toda a superfície muscular. A fascia separa cada músculo e em alguns casos
envolve grupos musculares. O tecido conjuntivo do músculo mantém juntas
as células musculares e liga os músculos aos tendões ou insere-os nos ossos.
A figura 4 demonstra bem a relação entre as fibras musculares, feixes e tecido
conjuntivo associado.
Maio 2005
Modelos dos Processos Fisiológicos no Homem
8
Mecânica Muscular
Ponto de Vista Fisiológico
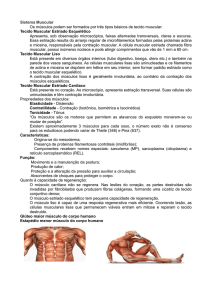
Figura 4 – ESTRUTURA MUSCULAR ESQUELÉTICA – Relação entre as fibras musculares,
feixes e tecido conjuntivo associado
1.2.2 Fibras Musculares
Os
múltiplos
núcleos
de
cada
fibra
muscular
encontram-se
imediatamente sob o sarcolema, enquanto que a maior parte da fibra está
preenchida por miofibrilhas, entre as quais estão alojados outros organelos,
como mitocôndrias e grânulos de glicogénio. O citoplasma sem as miofibrilhas
chama-se sarcoplasma.
As miofibrilhas compõem-se de duas espécies de filamentos proteicos
chamados miofilamentos. Os miofilamentos de actina, ou miofilamentos finos,
têm aproximadamente 8nm de diâmetro e 1000nm de comprimento, enquanto
que os miofilamentos de miosina, ou miofilamentos grossos, têm cerca de
12nm de diâmetro e 1800nm de comprimento. Na figura 5 podemos ver em
pormenor a constituição de um músculo.
Maio 2005
Modelos dos Processos Fisiológicos no Homem
9
Mecânica Muscular
Ponto de Vista Fisiológico
Figura 5 – PARTES DE UM MÚSCULO: A - O músculo é composto por feixes musculares
compostos por conjuntos de fibras musculares. B - Cada fibra muscular contém miofibrilhas em
que se podem ver estrias. C - As miofibrilhas consistem em unidades chamadas sarcómeros. D –
Cada sarcómero estende-se de uma linha Z à seguinte e consiste essencialmente em miofilamentos
de actina e miosina.
Maio 2005
Modelos dos Processos Fisiológicos no Homem
10
Mecânica Muscular
Ponto de Vista Fisiológico
1.2.3 Sarcómeros
Os miofilamentos de actina e miosina organizam-se em unidades
altamente ordenadas, denominadas sarcómeros, que se juntam topo a topo
para formar as miofibrilhas (ver figura 4 e 5).
Figura 6 – MICROFOTOGRAFIA ELECTRÓNICA DE UMA FIBRA MUSCULAR
ESQUELÉTICA – Microfotografia de uma secção longitudinal da fibra muscular esquelética
Cada sarcómero estende-se de uma linha Z para a linha Z imediata.
Linha Z é uma rede filamentosa de proteínas que forma uma estrutura em
forma de disco, que faz a ligação dos miofilamentos de actina (ver figura 6 e 7).
Figura 7 -COMPONENTES DE UM SARCÓMERO: A – Bandas I e A, zona H e linhas Z e M. B –
Secções transversais nas regiões indicadas do sarcómero.
Maio 2005
Modelos dos Processos Fisiológicos no Homem
11
Mecânica Muscular
Ponto de Vista Fisiológico
O arranjo dos miofilamentos de actina e dos miofilamentos de miosina
dá à miofibrilha uma aparência em bandas ou estriada quando vista
longitudinalmente (ver figura 6). Cada banda I, ou isotrópica (banda clara)
inclui uma linha Z e estende-se de cada lado da linha Z para as extremidades
dos miofilamentos de miosina. Cada banda A ou anisotrópica (banda escura)
estende-se ao comprimento dos miofilamentos de miosina num sarcómero. Os
miofilamentos de actina e miosina sobrepõem-se em parte da sua extensão em
ambas as extremidades da banda A. No centro de cada banda A está uma
pequena banda chamada banda H, onde os miofilamentos de actina e miosina
não se sobrepõem e apenas estão presentes miofilamentos de miosina. No
meio da zona H encontra-se uma banda escura chamada linha M que consiste
em delicados filamentos que se ligam ao centro dos miofilamentos de miosina.
A linha M mantém no lugar os miofilamentos de miosina, assim como a linha Z
mantém no lugar os miofilamentos de actina.
1.2.4 Miofilamentos de Actina e Miosina
Cada miofilamento de actina é composto por duas cadeias de actina
fibrosa (actina F), uma série de moléculas de tropomiosina e de troponina
(ver figura 8).
Figura 8 – ESTRUTURA DA ACTINA E DA MIOSINA: A – Os miofilamentos de actina
compõem-se de moléculas de actina globular (esferas a lilás), moléculas de tropomiosina
filamentosa (cadeias azuis) e moléculas de troponina globular (esferas vermelhas) juntas num único
filamento. B – Os miofilamentos de miosina compõem-se de muitas moléculas de miosina com a
forma de um taco de golfe, cada uma das quais tem uma porção em barra e uma cabeça globular.
Maio 2005
Modelos dos Processos Fisiológicos no Homem
12
Mecânica Muscular
Ponto de Vista Fisiológico
As duas cadeias de actina F (cada cadeia é um polímero de
aproximadamente duzentos monómeros – actina G) enrolam-se em dupla
hélice que se estende a todo o comprimento do miofilamento de actina.
Cada monómero de actina G tem um local específico a que se podem
ligar moléculas de miosina durante a contracção muscular.
A troponina compõe-se de três subunidades: uma que se liga à actina; a
segunda que se liga à tropomiosina e a terceira que se liga a iões cálcio.
Os miofilamentos de miosina compõem-se de muitas moléculas
alongadas de miosina. Cada molécula tem duas partes e a forma de taco de
golfe. As porções cilíndricas estão juntas e dispõem-se paralelamente. A dupla
cabeça estende-se lateralmente (ver figura 8 B).
Cada miofilamento de miosina consiste em cerca de cem moléculas de
miosina dispostas de forma a que cada cinquenta moléculas tem as suas
cabeças projectando-se para cada extremidade. A cabeça liga-se à porção
cilíndrica da molécula de miosina por uma zona encurvada que se pode dobrar
e estreitar durante a contracção. Uma segunda zona curva fica a curta
distância da cabeça na porção cilíndrica da molécula de miosina que contêm
ATPase (enzima que desdobra a adenosina trifosfato – ATP), permitindo
libertação de energia, e contêm também uma proteína que liga a cabeça da
molécula de miosina a locais específicos das moléculas de actina. A
combinação das cabeças de miosina com os locais de ligação das moléculas
de actina chama-se ponte.
1.2.5 Túbulos T e o retículo sarcoplasmático
O sarcolema tem, ao longo da sua superfície, muitas invaginações
tubulares – túbulos T ou transversais – túbulos regularmente dispostos e que
se projectam para dentro das fibras musculares e que se enrolam em torno dos
sarcómeros, na região onde os miofilamentos de actina e miosina se
sobrepõem (sistema T ou de túbulos transversais) (ver figura 9).
Maio 2005
Modelos dos Processos Fisiológicos no Homem
13
Mecânica Muscular
Ponto de Vista Fisiológico
Figura 9 – TÚBULOS E RETÍCULO SARCOPLASMÁTICO: Túbulo T e retículo sarcoplasmático
de cada lado do túbulo T (tríade).
O lúmen de cada túbulo T está preenchido com líquido extracelular.
Suspenso no sarcoplasma, entre os túbulos T, está um retículo
endoplasmático liso altamente especializado – retículo sarcoplasmático.
Perto dos túbulos T, o retículo alarga-se de forma a formar cisternas terminais.
Um túbulo T e as duas cisternas terminais adjacentes em conjunto denominamse tríade. A membrana do retículo sarcoplasmático transporta activamente iões
de cálcio do sarcoplasma para o lúmen, onde os iões cálcio são armazenados
em concentrações muito elevadas comparando com o sarcoplasma.
Maio 2005
Modelos dos Processos Fisiológicos no Homem
14
Mecânica Muscular
Ponto de Vista Fisiológico
1.3 Contracção Muscular
O processo de contracção das fibras musculares esqueléticas envolve a
análise de um conjunto de etapas:
1)
Excitação
da
fibra
muscular
esquelética,
envolvendo
o
desencadear do potencial de acção e a sua propagação ao longo do
sarcolema.
2) Acoplamento excitação/contracção, que inclui os processos de
transdução da excitação em actividade contráctil.
3) Ciclo das pontes cruzadas, respeitante à formação e ruptura cíclicas
dos complexos de actomiosina e à geração de força e de trabalho mecânico.
4) Relaxamento muscular.
Na figura seguinte está ilustrada uma hipotética contracção de uma
fibra muscular em resposta a um único potencial de acção.
Figura 10 -FASES DA CONTRACÇÃO MUSCULAR : Um músculo hipotético entra em
contracção. Há uma curta fase de latência, após a aplicação do estímulo, seguida de uma fase de
encurtamento e de uma fase de relaxamento
O período de tempo entre a aplicação do estímulo ao neurónio motor e o
início da contracção é a fase de latência; o tempo durante o qual ocorre a
contracção é a fase de encurtamento e o tempo durante o qual ocorre o
relaxamento é a fase de relaxamento.
A contracção muscular mede-se como uma força, também chamada
tensão, podendo chegar a necessitar de um segundo para ocorrer.
Maio 2005
Modelos dos Processos Fisiológicos no Homem
15
Mecânica Muscular
Ponto de Vista Fisiológico
1.3.1 Tipos de Contracção Muscular
Existem vários tipos de contracção podendo-se destacar:
1) Contracções isométricas – Nestas contracções não muda o
comprimento do músculo. O que aumenta é a quantidade de tensão durante o
processo de contracção. São responsáveis pelo comprimento constante dos
músculos posturais do corpo.
2) Contracções isotónicas – A quantidade de tensão produzida pelo
músculo é constante durante a contracção, mas o comprimento do músculo
altera-se.
3) Tónus muscular – É a tensão constante produzida nos músculos do
corpo por um longo período de tempo.
4) Contracções concêntricas – São contracções em que o músculo se
alonga e encolhe. São semelhantes às contracções isotónicas excepto em que,
à medida que o músculo encurta, a tensão produzida por ele aumenta.
5) Contracções excêntricas – Contracções em que a tensão é mantida
no músculo quando este aumenta de comprimento.
1.3.2 O Ciclo das Pontes Cruzadas
Os miofilamentos de actina e miosina não mudam de comprimento
durante a contracção do músculo esquelético. Em vez disso, os miofilamentos
de actina e miosina deslizam ao longo uns dos outros de uma forma que leva
ao encurtamento do sarcómero. Durante a contracção, formam-se pontes
entre as moléculas de actina e as cabeças das moléculas de miosina. As
pontes formam-se, deslocam-se, libertam-se e reformam-se de uma forma
similar ao remar de um barco. O movimento voluntário das pontes faz com que
os miofilamentos de actina em cada extremidade do sarcómero deslizem para
além dos miofilamentos de miosina no sentido da zona H. Em consequência,
as bandas I e as zonas H tornam-se mais estreitas, mas as bandas A mantêm
um comprimento constante (ver figura 11). A zona H pode desaparecer quando
os miofilamentos de actina se sobrepõem no centro do sarcómero. Quando os
Maio 2005
Modelos dos Processos Fisiológicos no Homem
16
Mecânica Muscular
Ponto de Vista Fisiológico
miofilamentos de actina deslizam sobre os miofilamentos de miosina, as linhas
Z aproximam-se e o sarcómero encurta-se.
Durante o relaxamento, as pontes libertam-se, permitindo que os
sarcómeros se estendam. Para isso é necessária a aplicação ao músculo de
alguma força, de modo a levar ao alongamento do sarcómero. Esta força é
habitualmente produzida por um músculo antagonista ou pela gravidade.
Figura 12 – ENCURTAMENTO DO SARCÓMERO -Encurtamento do sarcómero consequente da
formação das pontes. Durante a contracção, as bandas I (azuis) encurtam mas as bandas A (rosa)
não. A zona H (verde) estreita-se ou chega a desaparecer quando os miofilamentos de actina se
juntam no centro do sarcómero.
Figura 13 – DESLIZAMENTO DO MIOFILAMENTO FINO DURANTE A CONTRACÇÃO
MUSCULAR
Maio 2005
Modelos dos Processos Fisiológicos no Homem
17
Mecânica Muscular
Modelação Matemática
2. Análise Quantitativa da Contracção Muscular
Podemos estudar várias propriedades do músculo. No entanto, vamonos debruçar em particular sobre a variação da força de contracção ao longo
do tempo e sobre a relação entre a densidade populacional e o
deslocamento dos filamentos. Para tal, em vez de utilizarmos directamente
as equações diferenciais que descrevem a população de pontes vamos simular
em MATLAB o processo que está por trás destas equações. No apêndice A,
encontram-se as equações diferenciais que descrevem o modelo das pontes
cruzadas.
O programa que irá ser desenvolvido vai simular, basicamente, a
ligação, o deslizamento e a separação das pontes.
Para uma melhor compreensão do programa, faremos primeiramente
algumas considerações do comportamento microscópico da dinâmica das
pontes cruzadas.
2.1 Comportamento Microscópico – Dinâmica das Pontes
Cruzadas
2.1.1 Algumas Considerações
O ciclo das pontes cruzadas é descrito quantitativamente da seguinte
forma:
1. Uma ponte está ligada na configuração de equilíbrio, quando não
exerce força no filamento fino
2. Considerando x como a deslocação da configuração de equilíbrio
medida ao longo do filamento fino, podemos definir a função p(x) que
representa a força no filamento fino quando o deslocamento da ponte ligada é
x.
Maio 2005
Modelos dos Processos Fisiológicos no Homem
18
Mecânica Muscular
Modelação Matemática
3. Em geral, diferentes pontes têm diferentes valores de x. Como tal,
x2
define-se a função densidade de população,
³ u ( x)dx
que representa a
x1
fracção de pontes ligadas com um deslocamento x tal que x1 x x2 .
4. A força total exercida pelo músculo é a soma das forças exercidas
f
pelas diversas pontes, sendo dada por P
n0
³ p( x).u ( x).dx
onde n0 representa
f
o número de pontes.
Outras considerações devem ser tidas em conta:
5. A população de pontes está num estado estacionário
6. Todas as pontes formam as suas ligações para uma configuração
x=A> 0 (deslocação positiva)
7. São definidas duas constantes Į e ȕ. Sendo a primeira a
probabilidade, por unidade de tempo, para a ligação das pontes e a segunda, a
probabilidade, por unidade de tempo, para a separação das pontes.
2.1.2 Implementação do Programa em MATLAB
%nome do ficheiro: pontescruzadas.m
%unidades:
%comprimento:nm=nanómetros (nano=10^-9)
%tempo:s=segundos
%velocidade:nm/s
%força:pN=picoNewtons (pico=10^-12;Newton=Kg m/s^2)
clear all
clf
global p1 GAMMA;
global Tinicial V;
n0=10000
alpha=14
de ligação
%constantes em p(x)
%constantes em v(t)
%número de pontes cruzadas
% /s probabilidade por unidade de tempo
beta=126
% /s probabilidade por unidade de tempo
de separação
klokmax=3000
%número total de intervalos de tempo
dt=0.01/(alpha+beta) % s duração do intervalo
Maio 2005
Modelos dos Processos Fisiológicos no Homem
19
Mecânica Muscular
Modelação Matemática
A=5
% nm deslocação da recém-ligada ponte
cruzada
%constantes usadas em p(x)
p1=4
%pN
GAMMA=0.322
%/nm
%teste da função p(x) para garantir que p(0)=0
%para o intervalo de 10*eps, onde eps é a precisão da
máquina
if abs(p(0)/p(A))>10*eps
error('p(0) não é zero')
end
%constantes usadas na função v(t)
Tinicial=10/(alpha+beta) % tempo a que a acção se inicia
V=500
%nm/s velocidade de encolhimento
para t>Tinicial
%todas as pontes cruzadas estão inicialmente separadas
a=zeros(1,n0);
x=zeros(1,n0);
%número de porções para a função densidade populacional
nbins=round(sqrt(n0*alpha/(alpha+beta)));
%
for klok=1:klokmax
%loop sobre intervalos
de tempo
t=klok*dt;
%tempo corrente
dx=-v(t)*dt;
%alteração em meiocomprimento do sarcómero
x(find(a))=x(find(a))+dx;
%desloca apenas pontes
cruzadas ligadas
prob=(beta*dt)*a+(alpha*dt)*(1-a);
%probabilidade de
mudança de estado
change=rand(1,n0)<prob;
%decide qual ponte
cruzada muda de estado
a=xor(change,a);
%altera o estado dessas
pontes cruzadas
x(find(a&change))=A;
%para pontes recémligadas, define x=A
x(find(~a))=0;
%para todas as pontes
separadas, define x=0
%Armazenar resultados para futura graficação:
Maio 2005
Modelos dos Processos Fisiológicos no Homem
20
Mecânica Muscular
tsave(klok)=t;
Usave(klok)=sum(a)/n0;
Psave(klok)=sum(p(x));
P=Psave(klok)
Modelação Matemática
%tempo corrente
%fracção anexada
%força
%escreve força no ecrã
end
figure(1)
subplot(2,1,1),plot(tsave,Usave)
subplot(2,1,2),plot(tsave,Psave)
figure(2)
[u,xc]=popdens(x,a,nbins);
populacional
plot(xc,u,'*')
populacional
%avalia a densidade
%grafica a densidade
-Ficheiros Auxiliares
Foi necessário definir três funções auxiliares:
function vv=v(t)
%nome do ficheiro v.m
%velocidade de encurtamento no instante t
%contracção isométrica para t<Tinicial
%velocidade de encurtamento V para t>Tinicial
global Tinicial V;
if (t<Tinicial)
vv=0
else
vv=V;
end
function [u,xc]=popdens(x,a,nbins)
%nome do ficheiro popdens.m
%determinaçao da função densidade populacional de pontes
ligadas
Maio 2005
Modelos dos Processos Fisiológicos no Homem
21
Mecânica Muscular
Modelação Matemática
%variaveis de entrada
% x=vector de deslocação das pontes
% a=vector dos estados das pontes (0=separadas 1=ligadas)
% nbins=numero de porções
%variaveis de saida
% xc=vector de centros de porções (igualmente espaçados)
% u=vector de densidade populacional de pontes cruzadas
n0=length(x);
%numero total de pontes
cruzadas
Nabridges=length(x(find(a))) %numero de pontes ligadas
%nabridges=numero de pontes ligadas em cada porção;
%xc=centro das porções:
[nabridges,xc]=hist(x(find(a)),nbins);
%normalizaçao
nabridges
para
determinar
populacional das pontes
xstep=xc(2)-xc(1);u=(nabridges/Nabridges)/xstep;
densidade
function pp=p(x)
%nome do ficheiro p.m
%força da ponte em função da sua deslocação
%x e vector de deslocação da ponte
%pp=p(x) e o vector das forças correspondentes
global p1 GAMMA;
pp=p1*(exp(GAMMA*x)-1);
2.1.3 Interpretação do Programa
Primeiramente, os parâmetros são inicializados. Este programa utiliza
nanómetros (nm) como unidade de comprimento, segundos (s) como unidade
temporal, nanómetros por segundo (nm/s) como unidade de velocidade e
piconewtons (pN) como unidade de força.
Consideramos como modelo meio sarcómero contendo n0 pontes
cruzadas. O número de pontes por meio sarcómero, não tem um valor
Maio 2005
Modelos dos Processos Fisiológicos no Homem
22
Mecânica Muscular
Modelação Matemática
standard, visto que este vai depender da área seccional do músculo e,
consequentemente vai variar de músculo para músculo.
O valor usado, n0=1000, foi escolhido apenas por conveniência. Tornase simultaneamente, uma boa amostra de pontes sendo suficientemente
pequena para não ser afectada por ruído.
As variáveis Į (probabilidade de ligação por unidade de tempo), ȕ
(probabilidade de separação por unidade de tempo), klokmax (número total de
intervalos de tempo), dt (duração do intervalo de tempo), A (deslocamento das
pontes assim que se ligam), bem como as constantes p1 e • tomaram os
valores anteriores também por uma questão de conveniência e de, coerência
com a realidade.
O programa começa imediatamente por testar a função p(x) através
do ciclo if, assegurando que p(0)=0 (isto é, se não houver força não há
deslocamento).
Posteriormente e, após a definição dos parâmetros T inicial e V
encurtamento
consideramos que todas as pontes estão inicialmente separadas.
Para um dado instante, cada ponte pode estar num dos dois estados,
ligada ou desligada. Vai-se denominar o estado da ponte i através da variável
a(i). Quando a ponte está desligada a(i) é igual a zero e, quando a ponte está
ligada a(i) é igual a um. Uma ponte ligada tem um deslocamento x(i) desde a
sua configuração de equilíbrio. Quando x(i)>0 a ponte exerce uma força
positiva tendendo a encolher o músculo. Quando x(i)<0 a ponte exerce uma
força negativa oposta ao encurtamento. Quando x(i)=0 a ponte não exerce
força, podendo estar desligada.
Seguidamente vem o ciclo principal. No inicio deste loop, o tempo
corrente é avaliado e a mudança no comprimento dx é alterado através da
função v(t)-função auxiliar, que será discutida mais à frente. Agregado a este
loop sobre os intervalos de tempo surge também um loop sobre as pontes.
Este loop é uma versão vectorial e faz uso de duas importantes funções.
A função find aplicada a um vector devolve a lista de índices dos
elementos não nulos do vector. Na nossa situação, find(a) devolve uma
lista de índices de todas as pontes ligadas. Esta lista vai endereçar essas
pontes e, consequentemente, vai permitir que apenas estas se desloquem
através do comando x(find(a))=xfind(a)+dx .
Maio 2005
Modelos dos Processos Fisiológicos no Homem
23
Mecânica Muscular
Modelação Matemática
Após isso, a linha prob=(beta*dt)*a+(alpha+dt)*(1-a) vai
avaliar a probabilidade de mudança de estado no tempo corrente, para todas
as pontes. Esta probabilidade será ou beta*dt se a ponte está ligada no
início do intervalo de tempo ou alpha*dt se a ponte está desligada.
Posteriormente é gerada uma lista de números aleatórios através da
função rand (1,n0) e, consequentemente é criada uma matriz de números
independentes com uma linha e n0 colunas.
Esses números aleatórios são então comparados elemento por
elemento, com a probabilidade de mudança de estado correspondente.
A operação a<b em MATLAB produz um resultado numérico: 1 se a<b,
e, 0 se ab.
A linha change=rand(1,n0)<prob decide mudar o estado de todas as
pontes cruzadas de uma só vez (mas com uma decisão independente para
cada uma delas) e guardar os resultados com o valor 1 nos elementos da
função change correspondentes às pontes cruzadas que realmente mudaram
de estado durante o intervalo de tempo corrente e com valor 0 nos elementos
de change correspondentes às pontes cruzadas que mantiveram o seu estado
no intervalo de tempo corrente.
A função change é então usada para fazer a actualização da função
a, guardando as mudanças de estado que ocorreram. O truque aqui é usar
uma função do MATLAB – xor, onde xor(a,b) é 1 se a ou b, mas não os
dois ao mesmo tempo e, onde é 0 para as outras situações.
Se as funções change e a só podem tomar valores entre 0 e 1 então,
a=xor(change,a), na realidade altera o estado de a se change igual a 1 e
mantém o estado de a se change é igual a 0.
No nosso caso, change e a são vectores (do mesmo tamanho) e, a
comparação é feita elemento a elemento.
Finalmente, com o estado das pontes cruzadas actualizado temos que
nos recordar de colocar o deslocamento das recém-ligadas pontes cruzadas
igual a A e, temos que estabelecer o deslocamento das recém-desligadas
pontes cruzadas igual a zero.
Podemos localizar as recém ligadas pontes cruzadas com a expressão
find(change&a) e, podemos localizar todas as pontes desligadas com a
expressão find(~a). Aqui, & significa “AND” e ~ significa “NOT”. Assim,
Maio 2005
Modelos dos Processos Fisiológicos no Homem
24
Mecânica Muscular
Modelação Matemática
executamos os comandos x(find(a&change))=A e x(find(~a))=0 para
estabelecer o deslocamento dessas pontes cruzadas em particular (aquelas
que mudaram de estado). O deslocamento das outras pontes cruzadas (que
não mudaram de estado) foi actualizado anteriormente.
Após todas as pontes serem processadas e analisadas desta forma, são
armazenados alguns dados importantes (tempo, fracção de pontes ligadas,
força).
Quando o loop sobre o tempo é completo, o programa termina obtendose três gráficos diferentes. O primeiro relaciona a densidade populacional com
o tempo, o segundo a força com o tempo e o terceiro, a densidade populacional
com o deslocamento x.
Este programa vai recorrer às funções auxiliares descritas na secção
2.1.2.
A função v(t) descreve a velocidade de encurtamento no instante t.
Considera-se um exemplo simples, no qual v(t)=0 antes de Tinicial e
v(t)=V para t>Tinicial. Esta situação vai simular um músculo que tem um
comprimento fixo (isometria) antes de um determinado tempo e, depois, pode
contrair mas a uma velocidade controlada. O objectivo desta fase isométrica é
permitir que a população de pontes equilibre até à fracção de equilíbrio de
pontes ligadas (relembramos que começamos com todas as pontes
desequilibradas).
A função p(x) dá-nos a força gerada por uma ponte ligada cuja
deslocação é x.
Temos grande liberdade na descrição da função p(x), contudo a
expressão utilizada para a definir foi a obtida no apêndice A. A única restrição
que a função tem que satisfazer é p(0)=0, pois temos que garantir que as
pontes separadas não geram qualquer força.
A função popdens vai gerar a função densidade de população, definida
anteriormente. Esta função vai contar quantas pontes ligadas existem por cada
porção, sendo o número de porções escolhido aleatoriamente pelo utilizador
Maio 2005
Modelos dos Processos Fisiológicos no Homem
25
Mecânica Muscular
Modelação Matemática
2.1.4 Resultados e Discussão
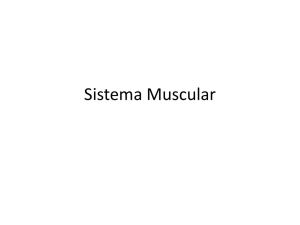
Obtiveram-se os seguintes gráficos:
Gráfico 1 - Variação da densidade populacional e da força de uma contracção ao longo do tempo.
Como se pode verificar, à medida que a contracção de inicia, o número
de células musculares recrutadas para executar a ligação/separação vai
aumentando até que atinge um plateau que corresponderá ao número máximo
de células que se podem envolver no processo.
No segundo gráfico verifica-se que numa fase inicial a força aumenta
até um valor elevado, num período de tempo que corresponderá à ligação, e
diminui abruptamente quando deixa de haver ligação. Simplesmente não é zero
porque devido ao elevado número de células envolvidas há sempre algumas
que ficam ligadas e isso contribui para que a força nunca se anule, e temos que
considerar a possibilidade de nestas células que foram experimentadas
estarem células antagonistas, que executam força no sentido contrário.
Todo este espaço de tempo corresponde a uma contracção.
Maio 2005
Modelos dos Processos Fisiológicos no Homem
26
Mecânica Muscular
Modelação Matemática
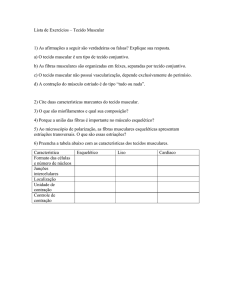
Gráfico 2 -Variação da densidade populacional em função da sua deslocação.
Neste gráfico verifica-se que só para x positivos é que a acção da
população se verifica significativamente. Isto é explicado porque no programa
se considera que assim que uma ponte cruzada se liga há uma deslocação de
5nm. Claro que só contribuem para essa deslocação as que estão ligadas.
Quando não há ligação não há deslocamento, não há contracção, podendo-se
até considerar que na parte negativa a população não é negativa pois alguma
dela estará envolvida num processo de distensão que conduziria a uma
deslocação negativa.
Maio 2005
Modelos dos Processos Fisiológicos no Homem
27
Mecânica Muscular
Modelação Matemática
2.2 Comportamento Macroscópico
Como é do senso comum, o nosso corpo efectua inúmeros movimentos
diariamente. Estudemos então um exemplo em particular.
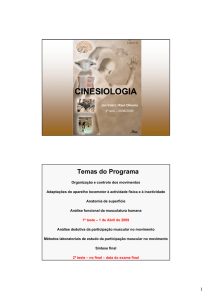
2.2.1 Balanço humano de um pêndulo invertido: Será o tamanho da
oscilação controlada pela impedância do tornozelo?
Usando a musculatura do tornozelo, indivíduos foram balançados num
grande pêndulo invertido. O equilíbrio do pêndulo é instável e oscilações
quase regulares foram observadas tal como se estivesse firmemente em pé.
Figura 14 MECANISMO DO PENDULO INVERTIDO
Duas questões importantes são colocadas:
Maio 2005
Modelos dos Processos Fisiológicos no Homem
28
Mecânica Muscular
Modelação Matemática
- Podem indivíduos alterar sistematicamente o tamanho da oscilação em
resposta a uma instrução e avaliação do feedback visual?
Se sim, coloca-se uma outra questão:
-Será que os indivíduos diminuem o tamanho da oscilação por aumento
da impedância do tornozelo ou por algum mecanismo alternativo?
Resultados mostraram que os sujeitos podem reduzir significativamente
o tamanho da oscilação do pêndulo dando uma total atenção a esse objectivo.
Com feedback visual o tamanho da oscilação pode ser minimizado
significativamente, mais do que sem feedback visual. Na mudança do tamanho
da oscilação a frequência das oscilações não variou.
Resultados também revelaram que a impedância do tornozelo e a cocontracção muscular não foram significativamente alteradas quando o tamanho
da oscilação foi diminuindo. Como a impedância do tornozelo e a frequência da
oscilação não variam, quando o tamanho da oscilação diminui isso implica que
não há alteração na rigidez ou viscosidade do tornozelo.
O aumento da impedância do tornozelo, rigidez ou viscosidade não são
os únicos métodos pelos quais o tamanho da oscilação pode ser reduzido. A
redução na inércia de torção através de um processo preditivo que gere um
amortecimento activo pode reduzir o tamanho da oscilação sem alterar a
impedância do tornozelo e é plausível dados os resultados. Tal estratégia
envolvendo reconhecimento do movimento e geração de uma resposta motora
correcta pode requerer níveis mais altos de controlo do que alterando a
impedância do tornozelo, alterando reflexos ou o ganho feedforward (feedback
por retroacção positiva).
Para representar este processo, convém salientar que o pêndulo é
modelado através da seguinte equação diferencial de segunda ordem:
I
d 2T
dT
b
K tt senT
2
dt
dt
Ttornozelo
onde I é a inércia, b o factor de viscosidade e Ktt a torção de oscilação
gravitacional por unidade angular.
Consideraram-se
os
seguintes
valores:
I=62.6
Kg.m2;
b=0.061
N.m.s.deg-1 e Ktt=10.3 N.m.deg-1.
Maio 2005
Modelos dos Processos Fisiológicos no Homem
29
Mecânica Muscular
Modelação Matemática
Ĭ é o ângulo que o pêndulo faz com a vertical e Ttornozelo é a torção do
tornozelo. Este é modelado considerando a existência de rigidez, viscosidade e
ruído através da seguinte equação:
Ttornozelo
k (T T 0 ) B
dT
Z
dt
em que k e B são a rigidez e a viscosidade do tornozelo, respectivamente e ș0
é o ângulo inicial. O ruído é representado por Ȧ.
Vamos considerar k=850+Ktt=1440 N.m.rad-1=25.1 N.m.deg-1 e B=300
N.m.s.rad-1=6.11 N.m.s.deg-1.
2.2.2 Implementação do Modelo no Simulink
Obteve-se o seguinte gráfico:
Maio 2005
Modelos dos Processos Fisiológicos no Homem
30
Mecânica Muscular
Modelação Matemática
Gráfico 3 -Variação do ângulo de torção com o tempo
No instante inicial verificamos que a inclinação é negativa sendo
aproximadamente -75º. À medida que o tempo avança o ângulo de torção
aumenta atingindo um máximo em 60º. Depois volta a diminuir até um mínimo
de -45º.Este processo repete-se ciclicamente.
Destes resultados podemos inferir que a concentração num dado
objectivo (neste caso, na diminuição do ângulo de torção) é suficiente para que
o objectivo se cumpra, uma vez que após se partir de um ângulo de -75º só
volta a diminuir até -45º o que denota uma diminuição do ângulo de torção.
Note-se que o sinal menos (-) deve ser desprezado uma vez que apenas
representa o sentido da torção.
O indivíduo ao concentrar-se consegue assim travar o movimento
muscular. Partindo do feedback visual, que é processado no cérebro e
transmitido por resposta neuronal aos músculos, este consegue aumentar a
resposta à torção e consequentemente diminuir o respectivo ângulo.
Maio 2005
Modelos dos Processos Fisiológicos no Homem
31
Mecânica Muscular
Conclusão
Conclusão
O nosso corpo é composto por centenas de músculos, desde o coração
(músculo cardíaco), até aos intestinos (músculo liso). No entanto, o tipo de
músculo mais estudado é o músculo esquelético. A sua unidade estrutural é o
sarcómero que encurta ou distende dependendo da fase da contracção em que
se encontra.
A contracção pode ser compreendida microscopicamente, através do
mecanismo das pontes cruzadas. Este foi estudado através de um programa
em MATLAB que nos permitiu verificar que à medida que a contracção se
inicia, o número de células musculares recrutadas para executar a
ligação/separação vai aumentando até que atinge um plateau, ou seja, existe
um número máximo de células que se pode envolver no processo.
Devido ao elevado número de células envolvidas, há sempre algumas
que ficam ligadas e isso contribui para que a força nunca se anule. Temos que
considerar a possibilidade de nestas células estarem células antagonistas, que
executam força no sentido contrário.
Como um dos objectivos do trabalho era utilizar o simulink, estudamos
macroscopicamente o movimento do tornozelo tendo em conta a sua
viscosidade, rigidez e impedância.
O simulink é uma ferramenta essencial para este estudo, pois o
processo de oscilação do indivíduo é dado por equações diferenciais, tendo
sido possível concluir que se o indivíduo se concentrar consegue travar o
movimento muscular visto que o movimento dos músculos esqueléticos
encontra-se
sob
o
controle
voluntário
Maio 2005
Modelos dos Processos Fisiológicos no Homem
do
cérebro.
32
Mecânica Muscular
Bibliografia
Bibliografia
BERNE, M. Robert e outros – Fisiologia (2000); 4ª edição; Guana bara
Koogan S.A.; Rio de Janeiro; 85-277-0559-1; pps 255-284
CORREIA, Pedro Pezarat – Anatomofisiologia (1999); 1ª edição;
Faculdade de Motricidade Humana; Cruz Quebrada; 972- 735-057-7; pps: 91121
Enciclopédia de Medicina, Selecções do Reader´s Digest (1992), 2º
volume, 1ª edição; Lisboa; 972-609-053-9; pps: 763-766
HOPPENSTEAD, Frank C e outro - Modeling and Simulation in Medicine
and the Life Sciences, 2ª edição; Springer; 0-387-95072-9; pps: 171-192
LIMA, J.J. Pedroso de - Biofísica Médica (2003), 1ª edição; Imprensa da
Universidade de Coimbra; Coimbra; 972-8704-09-7; pps: 355-360
McMAHON, Thomas A. - Muscles, Reflexes and Locomotion; 1ª edição,
Princeton University Press; Lawrenceville; 0-691-08234-0; pps: 139-165
SEELEY, Stephens -
Anatomia&Fisiologia;
3ª edição; Lusodidacta;
Lisboa; 972-96610-5-7; pps: 294-321
Maio 2005
Modelos dos Processos Fisiológicos no Homem
33
APÊNDICE
Mecânica Muscular
Apêndice A
APÊNDICE A
As pontes ligadas movem-se com o filamento fino. Uma ponte ligada
satisfaz a equação
dx
dt
v (1)
onde v é a velocidade de encurtamento do filamento fino relativamente ao
filamento grosso.
A taxa à qual as pontes se quebram é proporcional ao número de
pontes ligadas denotando-se a constante de proporcionalidade por ȕ (constante
de taxa de separação). Se tivermos em atenção às pontes que têm x num
intervalo particular (x1,x2), então o número de pontes (por meio sarcómero) é
x2
n0 ³ u ( x).dx (2)
x1
e a taxa à qual estas pontes se quebram
x2
En0 ³ u ( x).dx (3)
x1
A taxa total de separação é En0U .
Agora podemos derivar uma equação para a densidade de população de
pontes, u(x). Como as pontes se formam para x=A e movem-se por
deslizamento na direcção decrescente de x, temos u(x)=0 para x>A.
Consideremos a população de pontes que têm deslocamento x no
intervalo x0<x<A, em que x0 é qualquer valor de x tal que x0<A. Novas pontes
integram esta população pelo processo de ligação que ocorre à taxa
Dn0 (1 U ) . As pontes deixam de estar integradas neste intervalo quando:
1) Se quebram à taxa
A
En0 ³ u ( x) (4)
x0
2) Deslizam através da menor condição fronteira, em x=x0. A taxa deste
processo é dada por vn0 u ( x 0 ) , em que v é a velocidade de deslizamento
e n0 u ( x0 ) é a densidade de pontes em x=x0.
Maio 2005
Modelos dos Processos Fisiológicos no Homem
I
Mecânica Muscular
Apêndice A
Fazendo um balanço com as três taxas que considerámos. Isto dá-nos a
seguinte equação:
A
D (1 U )
E ³ u ( x)dx vu ( x0 ) (5)
x0
Para obtermos a equação diferencial, diferenciamos a equação anterior em
ordem a x0, resultando
0
Eu ( x0 ) v(
du
)( x0 ) (6)
dx
Como x0 pode ter qualquer valor de x, esta equação diferencial pode ser
escrita como
v
du
dx
Eu (7)
As soluções desta equação são do tipo
u ( x)
u ( A) exp( E ( x A) / v) (8)
A constante u(A) ainda não está determinada. Note-se que (8) só se aplica
quando x<A. Quando x>A, temos u(x)=0.
Para determinar u(A):
D (1 U )
vu ( A) (9)
Integrando (8):
A
U
³ u( x)dx
vu ( A) / E . (10)
f
Resolvendo (9) e (10) como um par de equações com duas incógnitas vem:
U
u ( A)
D
D E'
(11)
DE
(12)
v(D E )
Portanto, para x<A,
u ( x) DE
exp( E ( x A) / v)
(13)
v(D E )
e u(x)=0 se x>A.
Maio 2005
Modelos dos Processos Fisiológicos no Homem
II