ASTRODINÂMICA DE VEÍCULOS
ESPACIAIS
Vivian M. Gomes
157
Astrodinâmica de Veículos Espaciais
Vivian M. Gomes
Faculdade de Engenharia de Guaratinguetá - FEG / UNESP
Antonio Fernando Bertachini de Almeida Prado
Instituto Nacional de Pesquisas Espaciais
Introdução
O estudo do movimento de corpos celestes sempre foi um d(os problemas que mais atraíram a
curiosidade humana. As primeiras observações do céu mostraram que, apesar da grande maioria das
estrelas ocuparem posições relativas fixas, existem algumas exceções, que foram denominadas de
“planetas” (errantes), que possuem um movimento próprio no céu. Com base nessas observações surgiu
o interesse em descobrir maneiras de prever esse movimento e a busca por equações matemáticas que
pudessem explicar os dados observados. Assim surgiu a ciência da Astronomia, que se dedicava à
observação do céu e tentativas de interpretação dos fenômenos observados. Com o passar do tempo a
ciência foi evoluindo e a Astronomia passou a ter divisões bem definidas, como astrofísica, mecânica
celeste, etc. A mecânica celeste passou a ser à parte da Astronomia dedicada ao estudo do movimento
dos corpos celestes. Grandes nomes da ciência deram contribuições importantes nessa área, tais como
Poincaré, Kepler, Newton, Einstein, etc. Com o avanço da tecnologia, a humanidade passou a explorar
o espaço de uma forma mais efetiva que a simples observação do céu e passou a construir veículos
espaciais que são lançados da Terra e estudam tanto o seu espaço vizinho como o Sol, a Lua, outros
planetas, etc. Com isso, a mecânica celeste criou um novo ramo dedicado ao estudo do movimento dos
veículos espaciais, consistindo na modelagem das forças envolvidas para a previsão da posição e
velocidade do veículo espacial em função do tempo. Também passou a considerar maneiras artificiais
de alterar a trajetória de um veículo espacial através do uso de motores capazes de produzir uma
alteração na velocidade do veículo espacial.
Senso assim, o presente trabalho mostrará os modelos mais utilizados no planejamento de
missões espaciais: o modelo de dois corpos e o problema restrito de três corpos. Depois, mostrará
também formas utilizadas para alterar a órbita de um veículo espacial através do uso de propulsores.
Também será mostrada a técnica chamada de Swing-By, que consiste em utilizar a energia
gravitacional de um corpo celeste (um planeta ou um satélite natural) para efetuar uma manobra orbital
sem o uso de combustível.
Problema de Dois Corpos
A sucessão de eventos que levou a nossa visão atual do problema de prever o movimento de
corpos celestes começa com as observações feitas pelo astrônomo Tycho Brahe (1546-1601). Ele
coletou dados dos movimentos dos planetas a olho nu, mas com grande precisão. Esses dados foram
posteriormente estudados por Johannes Kepler (1571-1630), que formulou as três importantes leis,
chamadas “Leis de Kepler”, que define o movimento dos planetas em torno Sol e explica os dados
obtidos por Tycho Brahe. As leis são as seguintes:
1)
2)
A órbita de cada planeta é uma elipse, com o Sol ocupando um dos focos;
Para cada planeta, a velocidade é tal que o raio vetor que o une ao Sol percorre áreas iguais em
tempos iguais (velocidade aerolar é constante). Sendo assim, o movimento é mais rápido
quando o ponto de massa passa pelo perihelio e mais lento quando passa pelo afélio, para
compensar as diferenças de distâncias e manter as áreas constantes;
158
3)
O cubo do semi-eixo maior da órbita do planeta é proporcional ao quadrado do seu período
orbital.
É importante frisar que o modelo utilizado por Kepler já levava em conta a hipótese de que o
Sol ocupava o centro do Sistema Solar. O próximo grande passo foi feito por Isaac Newton
(1642-1727), que obteve uma lei matemática que fornece a força exercida entre dois pontos de massa
para que as trajetórias resultantes sigam as leis descobertas por Kepler. É a chamada “Lei de Newton da
Gravitação”, que pode ser formulada como:
Todos os corpos celestes são atraídos uns pelos outros com uma força de magnitude dada pela
equação
Fg = GMm r 2
(1)
Nessa equação, Fg é a força de gravitação entre dois corpos; M, m são as massas dos dois corpos
envolvidos; G = 6.668 10-11 Nm2kg-2 é a constante de gravitação universal; r é a distância entre os
centros de massa dos dois corpos.
Depois disso, Albert Einstein formulou a Teoria da Relatividade que mudou a forma de
enfrentar esse problema, principalmente para corpos com valores muito elevados para a densidade,
como os buracos negros. Porém, levando em conta os corpos existentes no Sistema Solar, a lei
Newtoniana é suficiente para estudar todos os problemas envolvidos em dinâmica orbital.
O Problema Restrito de Três Corpos
Nessa simplificação do problema geral de três corpos, é suposto que existem dois corpos M 1 e
M2 de massas finitas m1 e m2, respectivamente. Deseja-se então estudar o movimento de um terceiro
corpo de massa desprezível e que orbita o sistema formado pelos dois outros corpos. Entre os sistemas
que podem ser estudados com esse modelo, podemos citar: a) O movimento de cometas e asteróides no
Sistema Solar; b) A trajetória de um veículo espacial se dirigindo ao Sistema Solar Exterior (Júpiter,
por exemplo); c) A trajetória de uma sonda lunar; etc.
Em particular, manobras gravitacionalmente assistidas podem ser estudadas com esse modelo.
Esse assunto será abordado em detalhes mais à frente nesse trabalho.
Existem diversas versões do Problema Restrito de Três Corpos, conforme a modelagem adotada
(Szebehely, 1967). Vamos utilizar nesse trabalho somente a mais simples e estudada de todas, o
problema restrito-plano-circular de três corpos. Ele pode ser formulado como:
"Deseja-se conhecer o movimento de um corpo M3, de massa infinitesimal, em torno de um
sistema composto por M3 e dois outros corpos M1 e M2 com massas finitas. Considera-se que apenas
forças gravitacionais atuem no sistema, que as órbitas de M 1 e M2 em torno do centro de massa sejam
circulares e que M3 se mova apenas no plano das órbitas de M1 e M2".
A forma mais usual de se estudar esse problema é utilizar o sistema adimensional de unidades,
também conhecido como sistema de unidades canônicas. Nesse sistema ficam implícitas as seguintes
regras: 1) A unidade de distância passa a ser a distância entre M 1 e M2; 2) A unidade de massa se torna
m = m1 + m 2 ; 3) A velocidade angular do movimento de M e M torna-se unitária; 4) A constante
1
2
gravitacional passa a ser G = 1; 5) O período do movimento angular M1-M2 resulta em 2.
Podemos também definir como sendo a massa do menor primário, o que faz com que a massa
do maior primário sejá 1 = 1−. Com isso, as equações de movimento ficam:
x − 2 y = Ω x , y + 2 x = Ω y
159
Ω=
2
(x
2
)
+ y2 1− µ µ
+
+
2
r1
r2
2
r1 = ( x + µ ) + y 2
2
2
r2 = ( x − 1 + µ ) + y 2
(2)
Manobras Orbitais
O problema de transferir um veículo espacial (dotado de propulsores) de uma órbita para outra
tem crescido de importância nos últimos anos. Aplicações podem ser encontradas em diversas
atividades espaciais, tais como na colocação de um satélite em órbita geoestacionária, no deslocamento
de uma estação espacial, na manutenção de órbita de um satélite, no envio de sondas interplanetárias,
etc. Neste trabalho são apresentadas a definição formal do problema e as principais linhas de
modelagem. O objetivo é proporcionar ao leitor com conhecimentos básicos de mecânica celeste um
rápido entendimento do problema, bem como servir como um "guia" para referências que estudem esse
problema em maiores detalhes. O problema será sempre discutido em termos de transferência com
mínimo consumo de combustível, embora outras variantes do problema existam na literatura, tais
como: tempo mínimo para transferência, velocidade final mínima, encontro com outro veículo espacial,
etc.
Em termos conceituais, a transferência de um satélite com consumo mínimo de combustível
consiste em se alterar o estado (posição, velocidade e massa) de um veículo espacial das condições r0,
v0 e m0 no instante t0, para rf, vf e mf no instante tf (tf t0) com o menor gasto de combustível (m0 – mf)
possível. A transferência pode ser completamente vinculada (no caso de "rendezvous") ou parcialmente
livre (tempo livre, velocidade final livre, etc). No caso mais geral, deve-se fazer a escolha da direção,
sentido e magnitude do empuxo (o controle disponível) a ser aplicado, respeitando-se os limites dos
equipamentos disponíveis.
A literatura sobre o assunto apresenta diversas modelagens na abordagem desse problema. As
diferenças quanto aos vínculos dinâmicos (equações de movimento), podem ser divididas em:
i) Modelagem simples de dois-corpos, aonde é assumida a presença de um astro massivo (como
a Terra, a Lua, etc...) e de um veículo espacial de massa desprezível viajando nos arredores desse astro;
ii) Modelagem de dois-corpos perturbados, aonde é adotado o modelo matemático do item
anterior, acrescido de uma ou mais perturbações no sistema. Entre as perturbações mais comuns estão:
não esfericidade do astro principal, atrito atmosférico, existência de pressão de radiação (quando o Sol
está presente no sistema), presença de outros corpos, etc;
iii) Modelagem com três-corpos, que é uma modelagem muito comum para o estudo de
trajetórias lunares e interplanetárias. É assumida a presença de apenas três corpos no sistema, que são
tratados como pontos de massa. Nenhuma outra perturbação é considerada. É muito comum o caso
particular denominado "Problema restrito de três corpos", já mostrado anteriormente;
iv) Modelagem com N-corpos, que assume a presença de um número arbitrário N de corpos
celestes. Outras perturbações geralmente não são incluídas e todos os N corpos são tratados como
pontos de massa. Importantes aplicações para esse tipo de modelagem ocorrem em missões
multi-planetárias (diversos planetas e/ou satélites visitados por um mesmo satélite) como, por exemplo,
as missões Voyager I e II, Galileu, etc... Em geral essa modelagem é utilizada para refinar uma solução
encontrada por uma modelagem mais simples, como a de dois ou três corpos. Integração numérica e
linearizações em torno de uma órbita nominal são recursos usados com freqüência. É também muito
comum o uso de manobras gravitacionalmente assistidas, que serão mostradas mais a frente no presente
trabalho.
Quanto à modelagem do atuador (empuxo a ser aplicado ao veículo espacial) podemos notar a
presença de duas grandes categorias:
160
i) Empuxo infinito, aonde é assumido que o motor seja capaz de aplicar um empuxo instantâneo
e de magnitude infinita. O efeito desse impulso é medido através de uma variação instantânea na
velocidade do veículo espacial (∆V), que é suposto ter uma trajetória contínua. É o modelo mais
aplicado na literatura, devido a sua simplicidade e razoável precisão;
ii) Empuxo contínuo, aonde é assumido que o motor seja capaz de aplicar um empuxo finito por
um tempo diferente de zero. O efeito desse empuxo é medido por integrações numérica das equações
de movimento ou linearizações válidas por um curto período de tempo. Diversas variantes podem ser
encontradas na literatura quanto ao grau de liberdade do empuxo: magnitude constante ou variável,
possibilidade de mudar a direção do empuxo livremente ou com restrições (restrito a um plano ou cone,
etc), possibilidade de desligar o motor e alternar arcos propulsados com arcos balísticos, etc...
A Transferência de Hohmann
Um dos mais conhecidos resultados nesse campo é o trabalho de Hohmann, que obteve a
solução ótima do problema de transferência de um veículo espacial entre duas órbitas circulares e
coplanares em um campo gravitacional Newtoniano (que atua com uma lei do inverso do quadrado da
distância). Essa solução ainda é usada até hoje, sob certas circunstâncias, e foi considerada como a
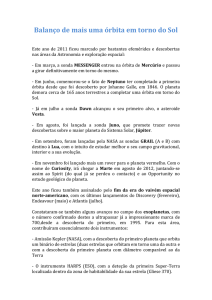
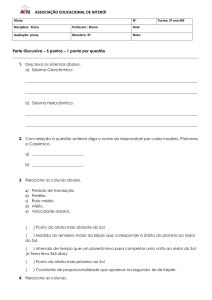
solução final do problema até 1959. Ela estuda o caso de uma transferência bi-impulsiva entre duas
órbitas circulares e coplanares com tempo livre e é mostrada na Fig. 1. Os passos principais envolvidos
nessa transferência estão resumidos abaixo. Na órbita inicial (O0) aplica-se um impulso na direção do
movimento e de magnitude dada por:
∆V0 = V0
2 R f
R0 −1
Rf
R +1
0
(3)
onde: R0 = raio da órbita inicial, R f = raio da órbita final, V0 = velocidade do veículo na órbita inicial.
Com isso o veículo entra numa órbita de transferência elíptica (O) com periapsis R 0 e apoapsis Rf.
Então, espera-se que o veículo complete meia revolução e atinja o apoapsis, quando é aplicado o
segundo e último impulso, na direção do movimento e com magnitude dada por:
∆Vf = V0 1 −
2
R 0
R
f
R
f
+1
R
0
(4)
Esse segundo impulso faz com que o veículo entre em uma órbita circular de raio R f. Com isso
tem-se que o tempo de transferência é a metade do período orbital da órbita O, isto é:
t = (1/2){[1+Rf/R0]/2}3/2T0
(5)
onde T0 = período da órbita inicial.
A Transferência de Hoelker e Silber (Bi-Elíptica e Tri-Impulsiva)
No final da década de 50, Hoelker e Silber mostraram que a solução de Hohmann é a solução
ótima apenas quando a razão entre os raios das órbitas final e inicial é menor que 11.94. Nos outros
161
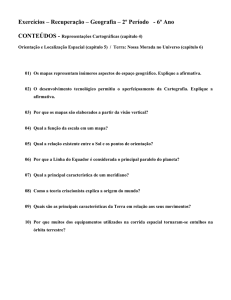
casos a transferência bi-elíptica tri-impulsiva é mais econômica. Essa transferência segue os seguintes
passos:
i) Aplica-se o primeiro impulso (∆V0) na órbita inicial, na direção do movimento do veículo, e
com uma magnitude tal que ele entre em uma órbita elíptica O 1 com periapsis R0 e apoapsis R. É
preciso que R > Rf , caso contrário a transferência de Hohmann seria mais eficiente;
ii) Quando o veículo atinge o apoapsis R, aplica-se o segundo impulso (∆V), também na direção
do movimento, e com magnitude tal que faça com que o veículo entre em uma órbita elíptica O 2 com
apoapsis em R e periapsis em Rf;
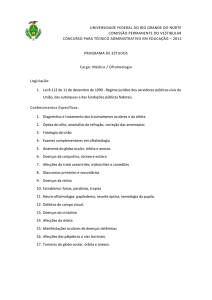
iii) Quando o veículo atinge o periapsis aplica-se o terceiro impulso, agora contrário a direção
do movimento, e com magnitude tal que faça com que o veículo entre em órbita circular de raio R f. A
Fig. 2 ilustra essa transferência.
É importante notar que a transferência é tanto mais eficiente, isto é, apresenta um menor valor
na soma dos incrementos de velocidade necessários em cada etapa, quanto maior for o valor de R. Essa
manobra é mais eficiente que a manobra de Hohmann devido ao fato do segundo impulso ser aplicado
longe do centro de atração, o que diminui o combustível necessário, porque a força de atração é muito
mais fraca nesse ponto (ela é inversamente proporcional ao quadrado da distância entre os corpos).
V
V
S
f
O
O
f
O
2
R
O
O
0
O
F
RF
O
1
f
0
F R0
V
0
V
V
Figura 1 – Transferência de Hohmann.
0
f
Figura 2 – Transferência Bi-Eliptica.
A Transferência Bi-Parabólica
Uma vez que se sabe que, quanto maior o valor de R (distância do veículo ao foco no momento
do segundo impulso) mais eficiente é a transferência, é lógico se pensar no limite de R tendendo ao
infinito. É justamente isso o que caracteriza a transferência bi-parabólica, que segue os seguintes
passos:
i) Na órbita inicial (O0) aplica-se um impulso, na direção do movimento e com magnitude (∆V0)
tal que faça com que o veículo entre em uma órbita parabólica O1;
ii) Quando o veículo atinge o infinito (teoricamente, é claro) aplica-se um segundo impulso,
infinitesimal, que faz com que o veículo passe da órbita O 1 para outra órbita parabólica O2. Esse
impulso não consome combustível, devido ao fato de R ser infinito;
iii) Quando o veículo passa pelo periapsis da órbita parabólica O2 aplica-se o terceiro impulso,
na direção oposta ao movimento e com magnitude (∆Vf) tal que faça com que o veículo entre na órbita
circular Of.
162
É óbvio que essa transferência não pode ser realizada na prática, pois o tempo necessário seria
infinito, devido ao passo ii.
A Manobra Assistida por Gravidade
Nesta seção, a manobra assistida por gravidade é definida e explicada. Essa manobra é também
conhecida usualmente como manobra de swing-by. Será feito um tratamento matemático desse
problema com base numa seqüência de interações de dois corpos. Os resultados principais são
derivados a partir desse modelo simples.
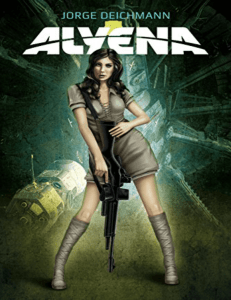
A importância das trajetórias assistidas pela gravidade (ou manobra de swing-by) pode ser bem
entendida pelo número de missões que voaram ou estão programadas para voar usando essa técnica.
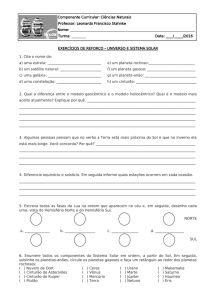
Um exemplo bem sucedido foi o das missões Voyager, que voaram para os planetas exteriores (a partir
de Júpiter) do Sistema Solar com o uso de swing-bys sucessivos nos planetas visitados, onde ganharam
energia. A Fig. 3 mostra essa famosa missão. Além dela, as trajetórias swing-by têm uma variedade de
aplicações, tais como: o uso do planeta Vênus para uma viagem da Terra até Marte; o uso do planeta
Júpiter para fazer uma forte alteração na inclinação do plano orbital de uma nave espacial, de modo que
ela seja transferida para uma órbita que tenha um plano orbital perpendicular a eclíptica, como a missão
Ulysses; o uso de swing-by com a Terra, ou outro planeta interior, para fornecer energia suficiente ao
veículo espacial para que ele atinja o exterior do Sistema Solar, conforme visto na Fig. 3, que mostra
uma trajetória para Plutão; o uso da Lua para lançar uma nave espacial para uma órbita elíptica ou
hiperbólica que termine em escape da Terra; o uso de sucessivos swing-bys com a Lua para obter
geometrias desejáveis nas órbitas das naves espaciais ao redor da Terra, tais como os satélites que
observam fenômenos solares; o uso de múltiplos swing-bys com propulsão nos satélites de um grande
planeta (Júpiter ou Saturno) para investigar esses satélites.
Todas as aplicações citadas acima estão no campo da Astronáutica, sendo que todas elas são
muito recentes se comparadas à literatura no campo da Astronomia. A mecânica celeste do swing-by já
é conhecida pelos astrônomos há cerca de 150 anos. Laplace entendeu o mecanismo completo da
manobra assistida pela gravidade. Posteriormente, alguns pesquisadores derivaram equações analíticas
para os efeitos do swing-by e/ou produziram resultados numéricos neste tópico, especialmente no
problema de escape e captura de cometas por Júpiter, que é essencialmente o mesmo problema.
Para um estudo com modelagem simplificada, podemos supor que a missão total pode ser
dividida em várias etapas. O modelo simples de dois corpos é utilizado para cada uma dessas etapas.
Essa abordagem é usualmente chamada de patched conics. Esse trabalho é baseado em Broucke (1988)
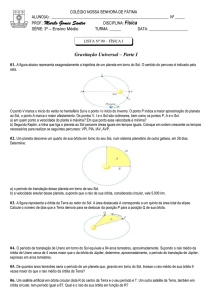
e Prado (1993). Considera-se que o sistema é formado por três corpos: M 1, um corpo massivo no centro
do sistema cartesiano; M2, um corpo menor, um planeta ou satélite de M1 em uma órbita kepleriana em
torno de M1; M3, uma nave espacial com massa infinitesimal ou uma partícula que está viajando em
uma órbita ao redor de M1, quando faz um encontro com M2. Este encontro altera a órbita de M3. Esse
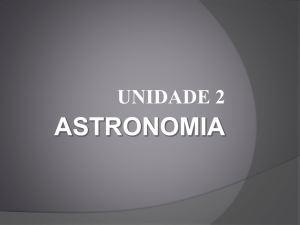
fenômeno é chamado de uma manobra de swing-by. De acordo com estas hipóteses, as órbitas de M1 e
M2 não se alteram. A Fig. 4 descreve o evento e mostra algumas das variáveis
envolvidas.
−
+
As variáveis são: V2 = a velocidade de M2 em relação a M1; V∞ , V∞ = vetores velocidade da
nave espacial relativa a M2, antes e depois do encontro, respectivamente; Vi , Vo = vetores velocidade da
nave espacial relativo a M1, antes e depois do encontro,
em
um referencial inercial, respectivamente;
−
+
= metade do ângulo de curvatura (o ângulo entre V∞ e V∞ ); rp = a distância de máxima aproximação
durante o encontro (ponto P) entre M2 e M3; = o ângulo entre a linha do periapsis (linha conectando
M2 a P) e a linha M1 - M2.
Para encontrar as equações necessárias é preciso, em primeiro lugar, usar a teoria das órbitas
hiperbólicas, com o objetivo de se obter uma expressão para . Esta expressão pode ser facilmente
encontrada na literatura e é dada por (Broucke, 1988):
163
sen( δ ) =
1+
1
r pV ∞2
µ2
(6)
onde: 2 = Gm2, sendo G a constante universal de gravitação. As variáveis independentes que
descrevem completamente a manobra swing-by são as seguintes:
V∞
i)
, a magnitude de velocidade da nave espacial no infinito, antes ou depois da passagem próxima;
ii) rp, a distância do periapsis;
iii) , o ângulo de aproximação.
J U P IT E R
7 /9 /7 9
La u n c h 1 1 /1 5 /2 0 0 1
J U P IT E R
3 /5 /7 9
SATU RN
1 1 /1 2 /8 0
SATU RN
8 /2 6 /8 1
P lu t o F ly b y
6 /2 7 /2 0 1 5
EARTH
9 /5 /7 7
SUN
EARTH
8 /2 0 /7 7
M AR S
M a ne uve r
5 /3 2 /2 0 0 3
URANUS
1 /2 6 /8 6
J u p it e r F ly b y
5 /1 0 /2 0 0 6
E a rth F ly b y
1 /1 /2 0 0 5
NEPTUNO
8 /3 0 /8 9
PLU TO
Figura 3 - Trajetórias das Voyager 1 e Voyager 2 e Trajetória para Plutão (Weinstein, 1992).
V
+
δ
δ
B
V
Vp
P
V
R um o a M
2
1
M
rp
δ
3
δ
V0
V
2
Ψ
M
+
X
2
V2
A
V
Vi
V
I
Figura 4 - A Manobra de Swing-By, Algumas de Suas Variáveis e a Soma de Vetores Velocidade.
164
O método aproximado conhecido na literatura como patched conics tem, então, as seguintes três
etapas:
i) Na primeira etapa, o efeito gravitacional de M2 é desconsiderado, e o movimento de M3 em torno de
M1 é tomado como sendo uma órbita kepleriana;
−
ii) Na segunda etapa, supõe-se que M3 entra na esfera de influência de M2. Então, a velocidade V∞ é
calculada a partir da equação:
V∞− = Vi − V2
(7)
A Fig. 4 mostra a soma de vetores que explica a origem da Eq. (7). O efeito de M 1 é
desconsiderado. O movimento de M3 ao redor de M2 é hiperbólico no caso dessa manobra. Nessa órbita
hiperbólica, a nave espacial M3 é desviada por M2 e seu vetor velocidade (com relação a M2) gira de um
ângulo 2, mas mantém sua magnitude constante. Então, a nave espacial cruza novamente a esfera de
influência de M2 e a abandona para retornar a uma órbita kepleriana em torno de M 1. Neste ponto, a
+
velocidade V∞ é dada por:
V∞+ = Vo − V2
(8)
iii) Após atingir essa condição, a nave espacial está em uma nova órbita kepleriana ao redor de M 1 e o
swing-by está completo.
O estudo das diferenças entre as órbitas anteriores e posteriores a esse encontro (etapas i e iii)
será desenvolvido a seguir. A primeira quantidade importante a ser calculada é a variação de velocidade
∆V = Vo − Vi , que representa a diferença entre as velocidades inerciais antes e depois do swing-by. A
partir de um diagrama de adição de vetores (Fig. 4), é possível demonstrar que (Broucke, 1988):
∆V = ∆V = 2 V∞ sen( δ ) = 2V∞ sen( δ )
(9)
A segunda quantidade importante a ser obtida é a variação do momento angular H. Partindo de
sua definição, é possível obter a expressão H = XY − YX , o que resulta na equação
+ ( ∆X ) Y
− Y ∆X
− ( ∆Y ) X
∆H = X ∆Y
( )
( )
para sua primeira variação. Esta equação se torna ∆H = R∆Y ,
utilizando a condição de que o encontro é instantâneo (X = Y = 0) e que, para t = 0 , X = R e Y = 0.
Então, combinando esse resultado com a expressão que pode ser deduzida para ∆Y (Broucke, 1988):
ω∆H = −2V2V∞ sen ( δ ) sen(ψ )
(10)
A terceira e última quantidade derivada aqui é a variação da energia. Isso pode ser feito por
subtração direta da energia após e antes do encontro. Assim sendo, podemos escrever que:
E+ =
2
2
1
(
X + ∆X ) + (Y + ∆Y )
2
,
[
]
E− =
1 2 2
(X +Y )
2
(11)
O resultado obtido com essa subtração pode ser simplificada (Broucke, 1988) para
∆E = −2V 2V∞ sen ( δ ) sen (ψ )
(12)
165
Olhando para as Eqs. (10) e (12), um resultado fundamental pode ser encontrado, ∆E = ω∆H .
Algumas conseqüências importantes
dessas equações podem ser obtidas estudando a Eq. (12)
em maior detalhe. Os parâmetros | V 2| e | V∞ | são quantidades positivas (eles são as magnitudes dos dois
vetores), assim como o sen() (porque 0 < < 90º). Então, o único parâmetro que afeta o sinal de
E é o sen().
A conclusão é que, para valores de no intervalo 0 < < 180°, E é negativo (decresce em
energia) e, para no interalo 180º < < 360°, E é positivo (aumenta em energia). Então, as
conclusões finais são:
- Se o swing-by ocorre na frente de M2 (0 < <180°),
há um decréscimo na energia de M3 com
uma perda máxima quando = 90° ( ∆V oposto a V2 );
- Se o swing-by ocorre atrás de M2 (180° < < 360°),
há um aumento na energia de M3 com um
ganho máximo quando = 270° ( ∆V na direção de V2 ).
A Fig. 4 mostra claramente como foi possível obter um aumento na velocidade (logo, em
energia) a partir de uma passagem próximo de um corpo celeste. Lembre-se de que essa energia é
medida com relação ao corpo principal M1 e é obtida à custa de uma redução da energia de translação
do planeta (M2) em torno de M1.
“Patched Conics”
As manobras acima descritas não levam em conta a fase de inserção em órbita em torno de um
segundo corpo, como por exemplo a Lua, em uma manobra dentro do sistema Terra-Lua. O método
"Patched Conics" resolve esse problema quebrando a manobra total em duas partes, da seguinte
maneira: i) A primeira parte despreza os efeitos da Lua e utiliza um dos métodos descritos
anteriormente para levar o veículo de sua órbita inicial até uma órbita que cruze com a trajetória da
Lua; ii) Quando o veículo atinge um ponto no qual a gravidade da Lua domina seu movimento (entrou
na chamada "esfera de influência da Lua"), os efeitos da Terra são desprezados e a órbita é considerada
como sendo kepleriana em torno da Lua. Diversos livros cobrem esse assunto em mais detalhes, como
por exemplo Taff (1985). A Figura 5 ilustra essa transferência.
Figura 5 – Transferência Terra-Lua.
Métodos modernos
Os métodos mais modernos de estudo de trajetórias espaciais estão baseados em dois conceitos
de mecânica celeste: o de captura gravitacional e o de manobras assistidas por gravidade, este último já
descrito acima.
166
A idéia básica de uma captura gravitacional é a de que uma órbita levemente hiperbólica
(energia residual positiva) em torno de um corpo (por exemplo, a Lua) pode ser transformada em uma
órbita levemente elíptica (energia residual negativa) devido a perturbações de outros corpos celestes
(por exemplo, a Terra e o Sol, no caso de uma captura pela Lua). Essa captura é em geral temporária,
mas, enquanto a energia permanece negativa, um impulso pode ser aplicado para completar uma
captura definitiva. A manobra realizada nesse momento apresenta economia de combustível em relação
a uma manobra realizada antes da captura. A
Esses dois conceitos são muito bem aplicados simultaneamente em transferências Terra-Lua.
Esse tipo de transferência segue os seguintes passos:
i) O veículo é lançado de uma órbita circular de raio R 0 para uma órbita elíptica que cruza com a
órbita da Lua em torno da Terra;
ii) O veículo faz um Swing-By com a Lua e ganha velocidade suficiente para elevar a altitude do
seu apoapsis a um valor acima da distância Terra-Lua, como na transferência bi-elíptica, mas com
economia de combustível em relação à manobra padrão devido à utilização da manobra assistida por
gravidade com a Lua;
iii) Quando o veículo se encontra no apoapsis dessa primeira órbita elíptica de transferência, um
segundo impulso de magnitude desprezível é aplicado para aumentar a altitude do periapsis até um
valor igual ao da distância Terra-Lua. Efeitos do Sol podem ser utilizados para reduzir o valor desse
impulso intermediário;
iv) A transferência é completada com uma captura gravitacional do veículo pela Lua e a
aplicação de um terceiro e último impulso para tornar a captura definitiva é efetuado.
Essa manobra é muito similar a transferência bi-elíptica, com a vantagem da economia de
combustível devido a três fontes: i) uso do Swing-by com a Lua para redução da magnitude do primeiro
impulso; ii) uso do efeito do Sol para redução da magnitude do segundo impulso; iii) uso da captura
gravitacional para redução da magnitude do terceiro impulso. Essa manobra também pode ser aplicada
em outros sistemas além do Terra-Lua e a possibilidade de manobras coplanares ou em três dimensões
ficam em aberto.
Figura 6 – Trajetória com Captura Gravitacional (Yamakawa, 1992).
Bibliografia
Battin, R. H., An Introduction to the mathematics and methods of astrodyanamics. AIAA, New York,
NY,1987.
Belbruno, E. A. Lunar capture orbits, a method of constructing Earth Moon trajectories and the
lunar gas mission In: AIAA/DGLR/JSASS International Electric Propulsion Conference, 19., Colorado
Springs, CO, 1987. (AIAA-87-1054).
167
Bender, D.F., Optimum coplanar two-impulse transfers between elliptic orbits. Aerospace
Engineering, 1962, pp. 44-52.
Bond, V. R.; Sponaugle, S. J.; Fraietta, M. F.; Everett, S. F. Cislunar libration point as a
transportation node for lunar exploration In: AAS/AIAA Spaceflight Mechanics Meeting, Houston,
TX, February, 1991. (AAS paper 91-103).
Broucke, R. A. "The Celestial mechanics of gravity assist," In:AIAA/AAS Astrodynamics
Conference, Minneapolis, MN, August, 1988. (AIAA paper 88-4220).
Broucke, R.A., Long-term third-body effects via double averaging. Journal of Guidance, Control,
and Dynamics, 26(1), 27-32, 2003.
Broucke, R.A., Prado, A.F.B.A. "Jupiter Swing-By Trajectories Passing Near the Earth", Advances
in the Astronautical Sciences, v. 82, n. 2, pp. 1159-1176, 1993.
Byrnes, D. V.; D'Amario, L. A. A combined Halley flyby Galileo mission In: AIAA/AAS
Astrodynamics Conference, San Diego, CA, August, 1982. (AIAA paper 82-1462).
Casalino, L. and Colasurdo, G., "Missions to Asteroids Using Solar Eletric Propusion." Acta
Astronautica Vol. 50, No. 11,, 2002: pp.705–711.
Casalino, L.; Colasurdo, G., and Pasttrone, D., Optimal Low-Thrust Scape Trajectories Using
Gravity Assist. Journal Of Guidance, Control and Dynamics, Vol. 22, n. 5, 1999, pp. 637-642.
Chobotov, V. A. Orbital motion – Second Edition. Reston: American Institute of Aeronautics and
Astronautics, 1996.
D'Amario, L. A.; Byrnes, D. V. Interplanetary trajectory design for the Galileo mission In: AIAA
Aerospace Sciences Meeting, 21., Reno, NV, Jan. 10-13, 1983. (AIAA paper 83-0099).
D'Amario, L.A., Byrnes, D.V. and Stanford, R.H., "Interplanetary Trajectory Optimization with
Application to Galileo," Journal of Guidance, Control, and Dynamics, v. 5, n. 5, pp. 465-471, 1982.
Danby, J. M. A. Fundamentals of Celestial Mechanics. Richmond: Willmann-Bell Inc., 1988.
De Luca, N. Mecânica Celeste, Curitiba: Editora da Universidade Federal do Paraná, 1982.
Dowling, R. L., Kosmann, W. J.; Minovitch, M. A.; Ridenoure, R. W., 1991, “Gravity Propulsion
Research at UCLA and JPL, 1962-1964”. In: 41 st Congress of the International Astronautical
Federation, Dresden, GDR, 6-12 Oct. 1991.
Dowling, R. L.; Kosmann, W. J.; Minovitch, M. A.; Ridenoure, R. W. Gravity Propulsion Research
at UCLA and JPL, 1962-1964 In: Congress of the International Astronautical Federation, 42.,
Montreal, Canada, Oct. 5-11, 1991.
Efron, L.; Yeomans, D. K.; Schanzle, A. F. ISEE-3/ICE navigation analysis. Journal of the
Astronautical Sciences, v. 33, n. 3, p. 301-323, 1985.
Ely, T. A. and Howell, K. C. East-West stationkeeping of satellite orbits with resonant tesseral
harmonics. Acta Astronautica 46(1), 1-15, 2000.
Farquhar, R. W. Future missions for libration-point satellites. Astronautics and Aeronautics, May,
1969.
Farquhar, R., Muhonen, D.; Church, L. C. Trajectories and orbital maneuvers for the ISEE-3/ICE
comet mission. Journal of Astronautical Sciences, v. 33, n. 3, p. 235-254, 1985.
Flandro, G., “Fast Reconnaissance Missions to the Outer Solar System Utilizing Energy Derived
from the Gravitational Field of Jupiter”. Astronautical Acta, v. 12, n. 4, 1966.
Gobetz, F.W. and Doll, J.R, A Survey of Impulsive Trajectories, AIAA Journal, Vol.7, 1969, pp.
801-834.
Gomes, V. M.; Prado, A. F. B. A. “The Use of Gravitational Capture For Space Travel”, 60th
International Astronautical Congress, CD: IAC Proceedings, IAC-09-A3.2int.16, ISSN 1995-6258,
Daejeon, South Korea, 2009.
Gomes, V. M.; Prado, A. F. B. A.; “A Numerical Study of the Dispersion of a Cloud of Particles”
CD: Proceedings of 20th International Congress of Mechanical Engineering (COBEM), COB09-1980,
ISSN 2176-5480, 2009.
Gomes, V. M.; Prado, AFBA . Avoiding collisions maneuvers using a stochastic approach.
International Journal of Mechanics, v. 5, p. 148-156, 2011.
168
Gomes, V. M.; Prado, AFBA .. A Study of the Impact of the Initial Energy in a Close Approach of a
Cloud of Particles. WSEAS Transactions on Mathematics, v. 9, p. 811-820, 2010.
Gomes, V. M.; Prado, AFBA .. Swing-by maneuvers for a cloud of particles with planets of the solar
system. Transactions on Applied and Theoretical Mechanics, v. 03, p. 11, 2008.
Gomes, V.M.; Prado, A.F.B.A.. Low-thrust out-of-plane orbital station-keeping maneuvers for
satellites. Mathematical Problems in Engineering (Print), 1-14, 2012.
Helton, A. F. N.J. Strange and J.M. Longuski, “Automated Desing of the Europa Orbiter Tour”,
Journal of Spacecraft and Rockets, Vol. 39, No. 1, January–February 2002.
Hoelker, R.F. and Silber, R.. The Bi-Elliptic Transfer Between Circular Co-Planar
Orbits.Tech Memo2-59, Army Ballistic Missile Agency, Redstone Arsenal, Alabama, USA, 1959.
Hohmann, W.. Die Erreichbarkeit der Himmelskorper. Oldenbourg, Munique, 1925. Marchal, C..
Transferts optimaux entre orbites elliptiques coplanaires (Durée indifférente). Astronautica Acta,
11(6):432-445, Nov./Dec. 1965.
Kuga, H. K.; Rao, K. R. Introdução à mecânica orbital, São José dos Campos: INPE, 1995.
(INPE-5615-PUD/064).
Lawden, D.F., Minimal Rocket Trajectories. ARS Journal, Vol. 23, n. 6, 1953, pp. 360-382.
Lawden, D.F.. Fundamentals of space navigation. JBIS, 13:87-101, May 1954.
Longman, R. W., Schneider, A. M. Use of Jupiter’s moons for gravity assist. Journal Spacecraft
Rockets, Vol.7, 1970, pp. 570-576.
Longuski J.M. and Williams S.N., The last grand tour opportunity to Pluto. J. Astronautic Science,
Vol.39, 1991, pp. 359-365.
Lynam, A. E.; Kloster, K. W.; Longuski, J. M., Multiple-satellite-aided capture trajectories at Jupiter
using the Laplace resonance, Celestial Mechanics Dynamics and Astronomical, 109, 59-84, 2011.
Marec, J.P., Optimal Space Trajectories. New York, NY,: Elsevier, 1979.
Minovich, M. A. A method for determining interplanetary free-fall reconnaissance trajectories, JPL
Tec. Memo 312-130, August 23, 47 p., 1961.
Moulton, F. R. An introduction to celestial mechanics. New York: Dover Publications, 1970.
Prado A.F.B.A, "Third-body perturbation in orbits around natural satellites." Journal of Guidance
Control and Dynamics, v.26, n. 1, p. 33-40, 2003.
Prado, A. F. B. A, “Close-Approach Trajectories in the Elliptic Restricted Problem”. Journal of
Guidance, Control and Dynamics, v. 20, n. 4, pp. 797-802, 1997.
Prado, A. F. B. A., "Traveling between the Lagrangian points and the Earth," Acta Astronautica, v.
39, n. 7, pp. 483-486, Oct, 1996.
Prado, A. F. B. A., “Powered Swingy”. Journal of Guidance, Control and Dynamics, v. 19, n. 5, pp.
1142-1147, 1997.
Prado, A. F. B. A., Broucke, R. A., “Transfer orbits in the Earth-Moon system using a regularized
model”. Journal of Guidance, Control and Dynamics, v. 19, n.4,p p.929-933, 1996.
Prado, A.F.B.A, “Numerical and analytical study of the gravitational capture in the bicircular
problem”, Advances in Space Research, v. 36, n. 3, pp. 578-584, 2005.
Prado, A.F.B.A. & A. Rios-Neto. Suboptimal and Hybrid Numerical Solution Schemes for Orbit
Transfer Maneuvers. SBA Controle & Automação, Vol. 4, no. 2, pp 82-88.
Prado, A.F.B.A. & R.A. Broucke. "A Classification of Swing-By Trajectories using The Moon".
Applied Mechanics Reviews, Vol. 48, No. 11, Part 2, 1995, pp. 138-142.
Prado, A.F.B.A. & R.A. Broucke. "A Study of the Effects of the Atmospheric Drag in Swing-By
Trajectories," Journal of the Brazilian Society of Mechanical Sciences, Vol. XVI, 1994, pp. 537-544.
Prussing, J.E. and Chiu, J.H., Optimal multiple-impulse time-fixed rendezvous between circular
orbits. Journal of Guidance, Control, and Dynamics, Vol.9, No. 1, 1986, pp.17-22.
Prussing, J.E., Optimal four-impulse fixed-time rendezvous in the vicinity of a circular orbit. AIAA
Journal, Vol. 7, n. 5, 1969, pp. 928-935.
Roth, H.L.. Minimization of the velocity increment for a bi-elliptic transfer with plane change.
Astronautical Acta, 13(2):119-130, May/Apr. 1967.
Roy, A. E. Orbital motion, Bristol: Adam Hilbert, 1988.
169
Ruppe, H. O. Introduction to astronautics. New York: Academic Press, 1966.
Santos, D.P.S.; Casalino, L.;Colasurdo, G. and Prado, A.F.B.A,. Optimal Trajectories towards
Near-Earth-Objects using Solar Electric Propulsion (SEP) and Gravity Assisted Maneuver. WSEAS
Transactions on Applied and Theoretical Mechanics, Vol. 4, 2009, pp. 125-135.
Shternfeld, A., Soviet Space Science, Basic Books, Inc., pp. 109-111, New York, 1959.
Silva, A. F. Manobras orbitais combinando uso de força gravitacional e impulso aplicado fora do
periapside. 2013. 244 p. (sid.inpe.br/mtc-m19/2013/02.18.00.50-TDI). Dissertação (Mestrado em
Mecânica Espacial e Controle) - Instituto Nacional de Pesquisas Espaciais (INPE), São José dos
Campos, 2013.
Strange N.J. and Longuski J.M., “Graphical Method for Gravity-Assist Trajectory Design”, Journal
of Spacecraft and Rockets, Vol. 39, 2002, No. 1, January–February 2002.
Striepe, S. A.; Braun, R. D. Effects of a Venus swingby periapsis burn during an Earth-Mars
trajectory. Journal of the Astronautical Sciences, v. 39, n. 3, p. 299-312, 1991.
Sukhanov AA, Prado AFBA, “Constant tangential low-thrust trajectories near an oblate planet”,
Journal of Guidance Control and Dynamics, v. 24, n. 4, p. 723-731, Jul-Aug. 2001.
Szebehely, V. Theory of Orbits. New York: Academic Press, 1967.
Taff, L. G. Celestial Mechanics – a Computational Guide for the Practitioner, New York: John
Wiley & Sons, 1985.
Taur, D.R.; Carroll, V.C. and Prussing, J.E., Optimal Impulsive Time-Fixed Orbital Rendezvous and
Interception with Path Constraints. Journal of Guidance, Control, and Dynamics, Vol. 18, n. 1, 1995,
pp. 54-60.
Ting, L. Optimum orbital transfer by several impulses. Astronautical Acta, 6(5):256-265, May 1960.
Torres, K. S., Prado, A. F. B. A., Changing Inclination of earth satellites using the gravity of the
moon, Mathematical Problems in Engineering, 2006, pp.1-13.
Uphoff, C. The art and science of lunar gravity assist In: AAS/GSFC Symposium, 1989. (AAS
89-170).
Walton, J. M., Marchal, C., and Culp, R.D., "Synthesis of the Types of Optimal Transfers between
Hyperbolic Asymptotes," AIAA Journal, v.13, n. 8, pp. 980-988, 1975.
Wang, K., Minimum Time Transfer Between Coplanar Circular Orbits by Two Impulses and
Propulsion Requirements. Astronautica Acta, Vol. 9, n. 1, 1963, pp. 12-19.
Weinstein, S. S., “Pluto Flyby Mission Design Concepts for Very Small and Moderate Spacecraft”.
AIAA paper 92-4372. In: AIAA/AAS Astrodynamics Conference, Hilton Head, SC, Aug. 10-12, 1992.
Yamakawa, H., On Earth-Moon Transfer Trajectory with Gravitational Capture. Tese de Doutorado,
University of Tokyo, 1992.
Yamakawa, H.; Kawaguchi, J.; Ishii, N.; Matsuo, H. A numerical study of gravitational capture orbit
in the Earth-Moon system In: AAS/AIAA Spaceflight Mechanics Meeting, Colorado Springs, CO,
Feb. 24-26, 1992. (AAS 92-186).
Zee, C.H. Effect of finite thrusting time in orbital maneuvers. AIAA Journal, 1(1):60-64, Jan. 1963.
170