XVIII Congresso Brasileiro de Automática / 12 a 16 Setembro 2010, Bonito-MS.
REJEIÇÃO DE DISTÚRBIOS EM UM SISTEMA DE LEVITAÇÃO ELETROMAGNÉTICA
FÁBIO F. NEVES; RODRIGO S. VALLE ; RICHARD M. STEPHAN
Laboratório de Aplicações de Supercondutores (LASUP), Departamento de Engenharia Elétrica, Universidade
Federal do Rio de Janeiro (UFRJ)
Caixa Postal 68504, 21941-972 , RIO DE JANEIRO , RJ
E-maisl: [email protected],[email protected], [email protected]
Abstract This paper presents the experimental verification of the rejection of disturbances of constant intensity or with sinusoidal variation in a system of electromagnetic levitation. The model, consisting of a levitating sphere, simulates the operation of
magnetic levitation trains (MagLev) or magnetic bearings. First, we provide a model for the electromagnetic levitation system.
Next, we discuss the problem of disturbances and its solution with experimental verification. This result demonstrates an application of Control Theory that can be used to compensate imbalances of rotating masses for magnetic bearings.
Keywords electromagnetic levitation, disturbance rejection, disturbance step, sinusoidal disturbance.
Resumo Este trabalho apresenta a comprovação experimental da rejeição de distúrbios de intensidade constante ou com variação senoidal em um sistema de levitação eletromagnética. O modelo, constituído por uma esfera levitante, simula o funcionamento de trens de levitação magnética (MagLev) ou de mancais magnéticos. Primeiramente, estabelece-se um modelo para o sistema de levitação eletromagnética. Em seguida, discute-se o problema de distúrbios e a sua solução com comprovações experimentais. Este resultado demonstra uma aplicação da Teoria de Controle que pode ser empregada na compensação de desbalanceamentos de massas girantes com mancais magnéticos.
Palavras-chave levitação eletromagnética, rejeição de distúrbios, perturbação degrau, distúrbio senoidal.
Ortega 2001, Sinha 1987, Sotelo 2004 e William
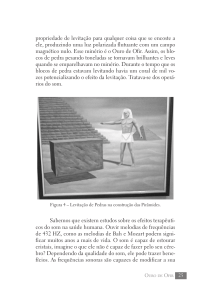
2004), ilustrado na figura 1, mas o foco principal será
a rejeição de perturbações de natureza constante ou
variante senoidalmente, que não recebeu muita atenção na literatura citada.
1 Introdução
Existem diversos métodos de levitação suportados em forças eletrostáticas, aerodinâmicas,
pneumáticas ou magnéticas de acordo com
Stephan (2002).
A levitação magnética consiste em gerar forças de
campo que sustentem um corpo sem nenhum contato
físico. Na levitação eletromagnética, o campo magnético é produzido por um eletroímã e a intensidade
do campo varia de acordo com a corrente que circula
no eletroímã.
Este princípio encontra aplicações em veículos de
levitação magnética, conhecidos como MagLev e
também em Mancais Magnéticos de acordo com
Moon (1994) e Schweitzer (2009). No presente artigo, o problema da levitação eletromagnética será
abordado à luz do tradicional experimento de levitação de uma esfera de material ferromagnético (Baranowski 2008, Gomes 2003 e 2004, Hurley 1997,
Jayawant 1976, Naumović 2003, Oliveira 2006,
Figura 1. Experimento de levitação de uma esfera
902
XVIII Congresso Brasileiro de Automática / 12 a 16 Setembro 2010, Bonito-MS.
De acordo com Mota (2008), os parâmetros K x e K i
da bancada experimental do laboratório para um gap
de 12 mm são 559,25 N/m e 2,25 N/A, respectivamente.
2 Modelo
Assim como o campo, a força magnética
varia de acordo com a distância ao eletroímã e para
cada gap (distância entre eletroímã e esfera) há uma
determinada corrente necessária para que a força
magnética total na esfera iguale o seu peso e ela
levite na posição desejada (posição de equilíbrio).
Tendo em vista que a esfera oferece uma distribuição
complexa do campo ao seu redor, não é possível
determinar uma expressão analítica para a força
magnética, mas pode-se aproximá-la por série de
Taylor no ponto de equilíbrio (𝑥0 , 𝑖0 ).
Fmag x0 + ∆x, i0 + ∆i
∆x
𝜕F mag
𝜕x
x0 , i0 + ∆i
3 Sistema Experimental
O sistema experimental contém dois sensores necessários para o monitoramento e controle.
O sensor de posição é um sensor ultrassônico e o
sensor de corrente é um sensor Hall. O ganho do
sensor de posição é K pos = 226,2 V/m e o ganho do
sensor de corrente é K c = 2, 025 A/V.
Ambas as medidas (posição e corrente) são transmitidas ao PC e processadas no real time toolbox do
Simulink, uma ferramenta de simulações em tempo
real do software Matlab. As figuras 2 e 3 apresentam
o esquema de funcionamento do sistema completo.
O sinal do sensor de posição 𝑥 é subtraído da referência de posição 𝑥0 (posição de equilíbrio desejada),
gerando o sinal de erro 𝑒𝑝 (𝑡) fornecido ao controlador de posição. Após o ganho do controlador, gera-se
a referência de incremento de corrente relativa à
posição 𝑖𝑐𝑝 (𝑡), necessária para compensar o peso da
esfera.
O sinal do sensor de corrente 𝑖 é subtraído da corrente de offset, gerando o sinal de erro de corrente
𝑒𝑖 (𝑡). Este sinal se somará a 𝑖𝑐𝑝 (𝑡) gerando o sinal
de controle 𝑠𝑐 (𝑡), o qual será utilizado no controle
da corrente.
= Fmag x0 , i0 +
𝜕F mag
x0 , i0
𝜕i
(1)
No referencial adotado da figura 1, para um ∆x > 0
ou para um ∆i > 0, a Fmag aumenta. Deste modo,
tem-se:
m∆x = Fmag − mg
(2)
Fmag x0 , i0 = mg
(3)
𝜕F mag
𝜕x
𝜕F mag
𝜕i
x0 , i0 = K x
(4)
x0 , i0 = K i
(5)
Fmag = mg + K x ∆x + K i ∆i
(6)
m∆x = K x ∆x + K i ∆i
(7)
Tabela 1. Variáveis e constantes do processo.
Parâmetro
Significado
m
x
x0
i
i0
Fmag
g
Kx
Massa da esfera
Posição da esfera
Posição de equilíbrio
Corrente no eletroímã
Corrente de equilíbrio
Força magnética
Aceleração da gravidade
Derivada direcional da Fmag em
relação à x
Derivada direcional da Fmag em
relação à i
Ki
Figura 2. Sistema de Levitação Eletromagnética no PC
Aplicando a transformada de Laplace, obtêm-se a
seguinte função de transferência para o sistema:
G s =
∆X(s)
∆I(s)
=
Ki
ms 2 − K x
(8)
Figura 3. Sistema de Levitação Eletromagnética na bancada
903
XVIII Congresso Brasileiro de Automática / 12 a 16 Setembro 2010, Bonito-MS.
3.1 Controle
controle de corrente do tipo Bang-Bang (On - Off)
com histerese que processa o sinal 𝑠𝑐 (𝑡).
A taxa de amostragem utilizada no ambiente
de simulação (6,67 × 10−5 𝑠) foi significativamente
menor do que a menor constante de tempo do processo, o que nos permitiu optar por um controlador
contínuo.
Para uma planta instável descrita na Eq.(8), com dois
3.2 Eletrônica de Potência
Esta parte do sistema é responsável por gerar a corrente que passa pelo eletroímã, de forma que
a esfera se mantenha na posição de equilíbrio. O
eletroímã é o atuador da malha de controle.
O circuito de potência é composto por dois mosfets e
dois diodos formando uma ponte.
Quando o sinal de controle é positivo, os dois mosfets são acionados e é aplicada uma tensão positiva
no eletroímã, ou seja, a corrente que passa no eletroímã aumenta e atrai a esfera. Quando o sinal de controle é negativo, os mosfets são bloqueados e é aplicada uma tensão negativa no eletroímã, ou seja, a
corrente que passa nele decresce e a esfera tende a
cair.
Portanto, os mosfets irão chavear numa freqüência
elevada e a corrente média ficará igual à corrente de
referência 𝑖0 quando a esfera estiver na posição de
equilíbrio 𝑥0 .
pólos reais em ± K x m ≅ ±39.5 𝑠 −1 , um controlador PD resolve o problema da estabilização do
controle de posição. No entanto, este controlador foi
realizado com um compensador LEAD, que acrescenta um pólo no controlador para filtrar ruídos de
alta freqüência. Para eliminar o erro de regime permanente foi ainda adicionado um integrador resultando C(s). Este integrador poderia também ser aproximado por um compensador LAG.
𝐶 𝑠 = 𝐾𝑝
𝑇𝑑 𝑠+1
∝𝑇𝑑 𝑠+1
+
1
(9)
𝑇𝑖 𝑠
Tabela 2. Parâmetros do Controlador de Posição.
Parâmetro
Valor
Kp
0.67
Td
0.025 s
Ti
1.0 s
∝
0.2
4 Resultados Experimentais
As partes do distúrbio e do Controlador
Anti-Distúrbio Senoidal, CADS(s), serão explicados
na próxima seção. Na figura 5 é exibido o diagrama
do Simulink.
Os parâmetros da Tabela 1 foram obtidos utilizando
a ferramenta rltool do Matlab, que permitiu determinar um controlador através da técnica de posicionamento de pólos. Na figura 4, podem-se verificar os
pólos da planta realimentada e também a posição do
zero do controlador em -40𝑠 −1 e do seu pólo em
-200𝑠 −1 .
Figura 5. Diagrama de blocos no Simulink
A figura 6 apresenta o sinal do sensor de posição de
uma experiência para uma referência de posição
constante. Pode-se observar que a esfera conseguiu
acompanhar a referência desejada.
Figura 4. Root Locus do sistema com LEAD
A partir do modelo da Eq.(8), nota-se que é possível
controlar a posição da esfera a partir do controle da
corrente no eletroímã. Deste modo, realizou-se um
904
XVIII Congresso Brasileiro de Automática / 12 a 16 Setembro 2010, Bonito-MS.
Deste modo, foi realizada uma experiência em que a
esfera estava levitando e em um determinado instante
foi adicionado um distúrbio de corrente 𝑑(𝑡) de valor
igual a 10% de 𝑖0 , resultando na figura 8.
Figura 6. Referência de posição constante
5 Rejeição de Distúrbios
Figura 8. Sinal de posição para uma perturbação em degrau
5.1 Introdução ao Problema
Pode-se observar que o erro de posição causado pela
perturbação degrau que entrou no sistema no instante
5s foi eliminado rapidamente. Isto se deve à ação do
integrador presente no controlador C(s).
As perturbações estão presentes em todos os
sistemas reais e sua compensação torna-se uma tarefa
desafiadora, pois, na grande maioria dos casos, não
podem ser medidas ou previstas.
Conhecidamente, perturbações de intensidade constante podem ser rejeitadas com a introdução de integradores e a adequada sintonia dos reguladores. Perturbações de natureza senoidal podem ser rejeitadas
desde que se saiba a freqüência do sinal de distúrbio,
como visto em Franklin (2002).
Perturbações de intensidade constante ocorrem, por
exemplo, em trens MagLev com a variação do número de passageiros ou carga.
Perturbações senoidais de freqüência conhecida ocorrem em sistemas com Mancais Magnéticos, empregados em máquinas que exigem alta velocidade de
rotação. A função dos Mancais Magnéticos é sustentar um eixo sem nenhum contato físico através do
controle de corrente de eletroímãs posicionados em
suas extremidades. Os distúrbios originam-se do
desbalanceamento nas partes girantes e ocorrem na
freqüência de rotação.
Para simular uma perturbação senoidal, foi
adicionado um sinal senoidal 𝑑(𝑡) ao sinal 𝑠𝑐 (𝑡) de
acordo com a figura 2.
A amplitude foi escolhida como sendo 10% do valor
da corrente de equilíbrio e a freqüência igual a
5 rad/s.
Para eliminar um distúrbio senoidal, o controlador
atual não funciona como mostra a figura 9. Portanto,
deve-se mudar o controlador.
Figura 7. Mancais Magnéticos
Figura 9. Sinal de posição na presença de uma perturbação senoidal
5.3 Rejeição de um Distúrbio Senoidal
5.2 Rejeição de um Distúrbio Degrau
Para simular uma perturbação degrau, que
equivaleria a uma força externa constante resultante,
por exemplo, de um aumento na massa da esfera, foi
adicionado um sinal degrau 𝑑(𝑡) ao sinal de controle
𝑠𝑐 (𝑡).
905
XVIII Congresso Brasileiro de Automática / 12 a 16 Setembro 2010, Bonito-MS.
5.4 Controlador Anti-Distúrbio Senoidal (CADS)
Isto caracteriza o CADS como um controlador específico para cada freqüência.
Com o controlador CADS(s), foi obtido o resultado
experimental apresentado na figura 11:
Para definir o novo controlador, deve-se
montar o diagrama da figura 10 e resolver o problema de regulação, na presença de distúrbio e com
referência de posição nula.
Figura 10. Problema de regulação
Deste modo, obtêm-se as seguintes equações:
𝐸𝑝 (𝑠)
𝐷(𝑠)
=
𝐺(𝑠)
1+𝐺 𝑠 𝐶𝐴𝐷𝑆 (𝑠)
𝐸𝑝 𝑠 = 𝐷 𝑠 (
=
𝑁𝐺
𝐷𝐺
𝑁 𝑁
1+ 𝐺 𝐶
𝐷𝐺𝐷𝐶
𝑁𝐺 𝐷𝐶
𝐷 𝐺 𝐷 𝐶 +𝑁𝐺 𝑁𝐶
)
(10)
Figura 11. Sinal de posição com atuação do CADS e perturbação
senoidal
(11)
Pode-se verificar nesta experiência, na qual o distúrbio foi aplicado no instante 1s e o CADS(s) no instante 8s, que o controlador CADS(s) rejeitou o distúrbio apresentando um erro de posição considerado
desprezível.
Sabendo-se que o sistema é estável, pode-se aplicar o
Teorema do Valor Final:
𝑒𝑝 ∞ = lim𝑠→0 𝑠 𝐷 𝑠 (
𝑁𝐺 𝐷𝐶
𝐷 𝐺 𝐷 𝐶 +𝑁𝐺 𝑁𝐶
)=0
(12)
6 Conclusão
Se o distúrbio for uma senóide, a partir da equação
(12), tem-se:
𝑒 ∞ = lim𝑠→0 𝑠
𝑤
(
𝑁𝐺 𝐷𝐶
𝑠 2 +𝑤 2 𝐷 𝐺 𝐷 𝐶 +𝑁𝐺 𝑁𝐶
)=0
Este trabalho mostrou, através de uma experiência de levitação magnética, a aplicação da teoria
de Controle para rejeição de distúrbios.
Distúrbios em degrau foram compensados com um
controlador com termo integral. Para eliminar distúrbios senoidais, houve a necessidade de um controlador com denominador composto de pólos imaginários com módulos iguais à freqüência de oscilação do
distúrbio, além de dois zeros no numerador para
garantir a estabilidade, como previsto na teoria.
Este resultado pode ser utilizado em Mancais Magnéticos no tratamento de distúrbios oriundos de desbalanceamentos mecânicos e será o objeto da continuidade deste estudo.
(13)
A partir da equação acima, concluí-se que o CADS
deve possuir pólos complexos no denominador iguais
a ± wi, sendo w a freqüência de oscilação do distúrbio, além de garantir a estabilidade do sistema.
A estabilidade é garantida com a escolha de dois
zeros para o CADS. Os zeros foram escolhidos utilizando a ferramenta rltool do Matlab, através da qual
se constatou uma boa estabilidade para zeros com a
parte imaginária até 2w e a parte real entre -35 e 0,
observando que os pólos da planta são ±39.5 𝑠 −1 .
Deste modo, foi necessário somar ao controlador
C(s) uma parcela para eliminar o distúrbio senoidal.
Esta parcela a ser somada foi nomeada de Controlador Anti-Distúrbio Senoidal, CADS(s), que foi determinado na figura 5 para uma freqüência de 5 rad/s
e com zeros do numerador iguais a −20 ± 5𝑖. A
variável β que multiplica o novo controlador foi
obtida empiricamente.
Para cada freqüência de distúrbio, os pólos do denominador do controlador deverão mudar, pois caso
contrário o distúrbio não será totalmente eliminado.
7 Agradecimentos
Agradecemos ao CNPQ e à FAPERJ pelo
apoio financeiro na realização deste trabalho.
906
XVIII Congresso Brasileiro de Automática / 12 a 16 Setembro 2010, Bonito-MS.
Sinha, P. K. (1987) Electromagnetic Suspension:
Dynamics and
Control.
IEE Control
Engineering Series, England.
Sotelo , G. G.; Gomes, R. R.; Stephan R. M. (2004)
Comparação de Configurações para um
Levitador Eletromagnético pelo Método dos
Elementos Finitos. In Congresso Brasileiro de
Magnetismo, vol. 6, pp. 1 - 4, Agosto, São
Paulo.
Stephan, R. M.; Machado, O. J.; Forain, I.; Andrade
Jr, R . (2002) Experiências de Levitação
Magnética. In Congresso Brasileiro de
Automática, v. 1, pp. 309 - 312, Natal.
William, G. H.; Hynes, M.; Wölfle, W. H. (2004)
PWM Control of a Magnetic Suspension System. IEEE Transactions on Education, vol. 47,
no. 2, pp. 165 - 173, May, Ireland.
8 Referências
Baranowski, J.; Piatek, P. (2008) Nonlinear Dynamical Feedback for Motion Control of Magnetic
Levitation System. Power Electronics and Motion Control Conference 2008, EPE-PEMC
13th, pp. 1446 - 1453, Poland.
Franklin, G. F. ; Powell,J. D.; Naeini, A. E. (2002)
Feedback Control of Dynamic Systems, 4° Ed.,
New Jersey.
Gomes, R. R.; da Silva, D.C.B.V.; Neto, J. L. S.
(2003) Electromagnetic Levitation Using
Matlab Real Time Control Toolbox. In IEEE
International
Symposium
on
Industrial
Electronics, vol.1, pp. 1144 - 1146, Rio de
Janeiro.
Gomes, R. R.; Sotelo, G. G.; Stephan, R. M. (2004)
Desenvolvimento de um Sistema Didático para
Levitação Eletromagnética com o Auxílio do
Método dos Elementos Finitos. In Congresso
Brasileiro de Automática, Gramado.
Hurley, W. G.; Wölfle, W. H. (1997)
Electromagnetic Design of a Magnetic
Suspension System. IEEE Transactions on
Education, vol. 40, no. 2, pp. 124 - 130, May,
Ireland.
Jayawant, B. V. ; Sinha, P. K.; Wheeler, A. R.;
Whorlow, R. J.; Willsher, J. (1976)
Development of 1-ton magnetically suspended
vehicle using controlled d.c. electromagnets.
In. Proc IEEE , vol.123, pp. 941 - 948, United
Kingdom.
Moon, F. C. (1994) Superconducting Levitation,
New York.
Mota, D. J. P. S. (2008) Controle da Posição de uma
Esfera em um Sistema de Levitação
Eletromagnética. Projeto Final DEE/UFRJ,Rio
de Janeiro.
Naumović, M. B. (2003) Modeling of a Didactic
Magnetic Levitation System for Control
Education. Telecommunications in Modern
Satellite, Cable and Broadcasting Service 2003.
6th International Conference on Telsiks, vol.2,
pp. 783 - 786, October 1-3, Serbia and
Montenegro.
Oliveira, V. A.; Tognetti, E. S.; Siqueira, D. (2006)
Robust Controllers Enhanced with Design and
Implementation Processes. IEEE Transactions
on Education, vol. 49, no. 3, pp. 370 - 382,
August, São Carlos.
Ortega, R.; Schaft, A. J.; Mareels, I.; Maschke, B.
(2001) IEEE Control Systems Magazine. Vol.
21, no. 2, pp. 30 - 32, April.
Schweitzer, G.; Maslen, E. H. (2009) Magnetic Bearings, London.
907