Anais do 12O Encontro de Iniciação Científica e Pós-Graduação do ITA – XII ENCITA / 2006
Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, Brasil, Outubro, 16 a 19, 2006
DESENVOLVIMENTO DE UM ALGORITMO PARA A SIMULAÇÃO DO
MOTOR DE INDUÇÃO TRIFÁSICO
Helton Dutra Geaquinto
UFSJ - Universidade Federal de São João del-Rei - MG.
[email protected]
José Tarcísio Assunção
UFSJ - Universidade Federal de São João del-Rei - MG.
[email protected]
Resumo. Este trabalho apresenta o desenvolvimento de um software para a simulação do motor de indução
trifásico e a determinação dos parâmetros do circuito equivalente, a partir dos dados de catálogo do fabricante. São
utilizados fatores de correção dos parâmetros em função da freqüência,e feita a modelagem dinâmica utilizando o
modelo dq0. É mostrado também o equacionamento do modelo proposto e resultado de algumas simulações. O método
proposto e a implementação computacional garantem resultados precisos e confiáveis. O programa é feito em
ambiente MATLAB, com interface gráfica para entrada de dados. Todas as equações deduzidas e utilizadas são
aplicáveis aos motores de indução trifásicos de rotor tipo gaiola.
Palavras chave: motor de indução, parâmetros do MIT, modelagem matemática, programação, MATLAB.
1. Introdução
As máquinas de corrente alternada, em particular, as máquinas de indução, foram inventadas no século XIX, em
torno de 1880, e sua evolução foi bastante rápida. Logo as máquinas de indução se tornaram o principal tipo de
conversor eletromecânico, favorecendo a proliferação dos sistemas de corrente alternada. Essa posição de liderança das
máquinas de indução nos mais diversos setores de atividade, particularmente na indústria, é mantida ainda hoje e deverá
perdurar por bastante tempo. As máquinas de indução são robustas construtivamente, apresentam elevado rendimento e
custo inicial baixo (Fitzgerald, 2003). Sua vida útil é projetada para um período de 20 anos, mas se forem utilizados
dentro das especificações de projeto podem durar muito mais tempo (Assunção, 1990).
O motor de indução trifásico (MIT) de rotor tipo gaiola é o tipo dominante no mercado de motores elétricos, e
participa com mais de 97% das unidades vendidas. Aos motores de indução trifásicos cabe uma parcela importante do
total da energia elétrica consumida no Brasil, cerca de 25%, sendo uma carga representativa tanto no setor industrial
com 49% referente à força motriz, segundo dados do PROCEL - Programa Nacional de Conservação de Energia, como
no setor comercial. Portanto, ações de conservação de energia nestes equipamentos revelam-se de grande importância.
Recentemente, em 17 de outubro de 2001, foi sancionada a lei número 10.295 que dispõe sobre a Política Nacional
de Conservação e Uso Racional de Energia, que prevê o estabelecimento de índices mínimos de eficiência energética,
ou níveis máximos de consumo específico de energia para máquinas e aparelhos consumidores de energia, fabricados e
comercializados no país. O motor elétrico de indução trifásico foi selecionado como o primeiro aparelho consumidor de
energia a ser regulamentado.
Sendo cada vez maior o interesse na aplicação do MIT, é necessária a análise mais cuidadosa do comportamento e
desempenho desse tipo de motor (Assunção, 1990, Shindo, 2003), evitando assim motores sobredimensionados, que
provocam uma considerável perda de energia. Neste sentido, a modelagem matemática do motor é fundamental para
esta análise. Atualmente, devido à grande capacidade computacional disponível, são implementados algoritmos de
identificação de parâmetros mais precisos e confiáveis (Aguirre, 2000).
O circuito equivalente do MIT é um primeiro passo para se obter uma análise do desempenho e especificação do
motor (Assunção, 1990; Lobosco, 1988). Além disso, com o circuito equivalente, é possível calcular a queda de tensão,
correntes, perdas, conjugado. Esta análise do MIT é muito importante para uma melhor descrição do motor, que
contribui para uma maior eficiência energética (Lobosco, 1988; NBR 7094, 2003).
Neste trabalho é apresentado o desenvolvimento de um algoritmo e uma interface gráfica para a determinação dos
parâmetros do circuito equivalente do MIT usando dados de catálogo do fabricante. Posteriormente uma modelagem
dinâmica do mesmo (Ong, 1997; Krause, 1994; Cad, 2000) é feita. Foram comparados os conjugados de partida e
nominal e os valores do fator de potência e rendimento disponíveis nos catálogos de fabricantes com os valores obtidos
pelo método proposto e ,por meio dos erros calculados, é verificada a validade do método desenvolvido. O algoritmo
foi desenvolvido em Matlab®. A implementação da interface gráfica facilita a entrada dos dados de catálogo que, de
acordo com a (NBR 7094, 2003), deve ser fornecido pelo fabricante do motor.
Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006
2. Conceitos preliminares
Nesta seção é feita uma breve descrição do MIT, do seu circuito equivalente e parâmetros físicos do mesmo.
2.1. Cicuito equivalente do MIT
O motor de indução possui enrolamentos trifásicos distribuídos, simétricos e equilibrados no estator, que pode ser
caracterizado por três bobinas concentradas. Cada fase é distribuída espacialmente por 120º no perímetro do estator, e
cada enrolamento possui o mesmo número de espiras.
O modelo matemático para a operação em regime permanente, chamado modelo de circuito equivalente, caracteriza
a operação do motor de indução sob condição de alimentação senoidal e equilibrada, e com velocidade mecânica
constante.
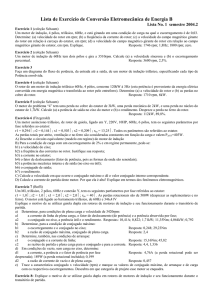
O Circuito equivalente do motor de indução trifásico é normalmente representado por fase e referido ao estator,
conforme ilustrado na a Figura 1.
Figura 1 - Circuito equivalente do MIT.
Em que:
R1 = Resistência do estator por fase - Representa as perdas joule ( RI 2 ) do enrolamento do estator.
X 1 = Reatância de dispersão do estator por fase - Representa a parcela referente aos fluxos que enlaçam totalmente
ou parcialmente os enrolamentos do estator, entretanto, não contribuem para o fluxo útil do motor, ou seja, fluxo mútuo
entre estator e rotor.
R2 = Resistência do rotor refletida ao estator por fase - Representa a parcela das perdas joules ( RI 2 ) das barras
curto – circuitadas do rotor.
X 2 = Reatância de dispersão do rotor refletida ao estator por fase - Representa a parcela referente aos fluxos que
enlaçam totalmente ou parcialmente as barras do rotor, entretanto, como no caso do estator, não contribuem para o
fluxo útil do motor.
Rm = Resistência correspondente às perdas do núcleo por fase - Representa as perdas magnéticas no núcleo por
fase do motor devido as correntes parasitas e ao fenômeno de histerese magnética, que são, respectivamente, perdas por
correntes induzidas nas chapas do núcleo laminado do motor e as perdas devido às densidades de fluxo.
X m = Reatância de magnetização por fase - Representa a parcela do fluxo útil no motor, ou seja, o fluxo mútuo
entre o estator e o rotor, que é o responsável pela indução de tensão nas barras do rotor.
3. Metodologia
A implementação do algoritmo para cálculo dos parâmetros do MIT a partir de dados de catálogo constitui em
quatro etapas. Inicialmente foi implementado o algoritmo do cálculo dos parâmetros do motor para operação na região
de trabalho do motor, ou seja, operação com escorregamento próximo ao valor nominal. Na segunda etapa, o algoritmo
foi testado comparando os valores de conjugado, corrente, velocidade, rendimento e fator de potência calculado por
meio do circuito equivalente com os dados de catálogo e com dados de ensaio de tipo de fabricante.
Na terceira etapa, as características de operação do MIT na região de alto escorregamento, especificamente na
partida, é implementada determinando o fator de saturação, para a correção das reatâncias de dispersão e o efeito
pelicular na resistência e reatância do rotor. Finalmente, o algoritmo foi testado comparando os resultados da simulação
com os dados de fabricante.
Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006
Determinado o circuito equivalente do motor de indução trifásico, de rotor gaiola, pode-se simular a operação
do MIT em regime permanente e, usando o modelo dq0, a simulação dinâmica do motor (Ong, 1997; Krause, 1994;
Cad, 2000).
3.1. Obtenção dos parâmetros do circuito equivalente para a faixa normal de trabalho
Considerando que os parâmetros do circuito equivalente do motor podem ser constantes e iguais aos valores
nominais na faixa normal de trabalho, 0< s ≤ sn. , e ainda que a curva caractípica de C = f(escorregamento) é linear,
conclui-se que o conjugado disponível na ponta do eixo do motor varia linearmente com o escorregamento, o que nos
permite escrever que:
C=
s
Cn
sn
(1)
e, analogamente têm-se:
C 2n =
n1
Cn
nn
(2)
Em que:
C 2 n =conjugado nominal transferido no entreferro do motor, [N.m].
C n = conjugado nominal disponível na ponta do eixo do motor, [N.m].
n1 = velocidade síncrona [rpm].
nn = velocidade nominal [rpm].
Assim obtém-se, a potência disponível no entreferro do motor:
P + PAV
2πn1 C n
2π n1
Cn =
= n
60 nn
60 1 − s n
1 − sn
2
P2 n =
(3)
Que permite o cálculo das perdas nominais de atrito e ventilação, ou seja:
PAV = P2 n (1 − s n ) − Pn
(4)
Da Eq. (1) e Eq. (3) obtém-se a potência transferida no entreferro do motor a 50% e 75% da carga nominal:
2πn1 0,50
Cn
60 1 − s 50
2πn1 0,75
=
Cn
60 1 − s 75
P250 =
(5)
P275
(6)
As perdas mecânicas (atrito e ventilação) variam com a velocidade do motor. No entanto, quando comparadas com
as perdas totais são pequenas e podem ser consideradas constantes e iguais ao valor nominal. Então:
P50 = P250 (1 − s50 ) − PAV
P75 = P275 (1 − s50 ) − PAV
(7)
(8)
que correspondem às potências disponíveis no eixo do motor (potência mecânica) para 75% e 50% da carga
nominal.
É importante observar que os pontos de 100%, 75% e 50% da carga nominal, obtidos dos catálogos, correspondem
na verdade aos pontos de operação a 100%, 75% e 50% do conjugado nominal. E, nas equações dadas a seguir os
Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006
subíndice “x” deve ser substituído por “n”(nominal); “75” ou “50” para se referir respectivamente a: carga nominal,
carga igual a 75% da nominal e carga igual a 50% da nominal.
Então, com os valores dos rendimentos, dados de catálogo, e a potencia mecânica determinadas na Eq. (7) e (8) é
calculada a potência elétrica demandada para 100%, 75% e 50% da carga nominal substituindo os valores
correspondentes na Eq. (9):
P1x =
Px
(9)
ηx
e com os valores do fator de potência para cada ponto de operação e a tensão terminal por fase, obtém-se:
I 1x =
Px
3U 1x cos δ x
(10)
Neste ponto, as potências reativas, para cada ponto de operação, são calculadas por:
Q1x = 3U 1x I 1x senδ x
(11)
Analisando o fluxo de potência ativa no motor pode-se escrever:
P1n = PC1n + PFN + P2 n
P150 = PC1n D1 + PFN + P250
(12)
(13)
sendo:
⎞
⎟⎟
⎠
⎛I
D1 ≡ ⎜⎜ 150
⎝ I 1n
2
(14)
Da Eq. (12) e (13) e considerando a resistência do estator constante e igual ao valor nominal (R1 =f (temperatura)),
e desprezando as pequenas variações das perdas no ferro na região 0 < s ≤ sn, calcula-se as perdas nominais no cobre do
estator e as perdas nominais no núcleo do estator, respectivamente:
P175 − P275 − P1n + P2 n
D1 − 1
= − P1n − PC1n − P2 n
PC1n =
(15)
PFN
(16)
Então, é determinado o primeiro parâmetro do circuito equivalente do MIT:
R1n =
PC1n
3I 1n
(17)
2
Para o cálculo dos outros parâmetros, é necessário determinar a tensão do circuito secundário:
o
o
o
o
U 2 = U1− Z1 I1
(18)
Considerando o paralelo do circuito equivalente de magnetização com o circuito do rotor, tem-se na condição
nominal de operação:
o
o
o
Z En = Z M // Z 2
(19)
Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006
E, tomando a componente real da Eq. (19):
o
R En = ℜ( Z En )
(20)
Pode-se escrever que:
PEn ≡ P2 n + PFn = 3REn I 1n = 3U 2 n I 1n cos δ En
2
(21)
Sendo que:
cos δ En =
REn
Z En
(22)
Como:
o
o
o
U 2 n = Z En I 1n = U 2 n ∠δ u = Z En I 1n ∠(δ En − δ u )
e, considerando inicialmente
(23)
δ En = 0 o , conclui-se que
δ En = δ n
(24)
Então, da Eq. (21) e (24) obtém-se:
U 2n =
PEn
3I 1n cos δ n
(25)
Com o valor da tensão secundária nominal pode-se escrever:
QEn = 3U 2 n I 1n senδ n
(26)
Analisando novamente o circuito equivalente pode-se escrever que a potência reativa nominal demandada pelo
estator do motor é:
QC1n = Q1n − QEn
(27)
As reatâncias nominais de dispersão do estator, do rotor e a reatância de magnetização, podem ser consideradas
constantes e iguais aos valores nominais, na região normal de trabalho do motor (0 < s ≤ sn,).Então se conclui que:
QM 50 =
Q250 =
3U 250
U 2n
I 250
I 2n
2
2
QMn
(28)
2
2
Q2 n
(29)
e fazendo:
⎛I
D2 ≡ ⎜⎜ 250
⎝ I 2n
2
⎞
s P
⎟⎟ = 50 250
s n P2 n
⎠
Definindo que:
(30)
Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006
⎛U
D3 ≡ ⎜⎜ 250
⎝ U 2n
⎞
⎟⎟
⎠
2
(31)
pode-se escrever as equações de fluxo de potência reativa para dois pontos de carga no motor, e concluir que:
Q150 − QC150 − D3 (Q1n − QC1n )
D2 − D3
= Q1n − QC1n − Q2 n
Q2 n =
(32)
QMn
(33)
Como Q2 n é pequena comparada com
P2 n , pode-se considerar o valor de QMn correto, pois ele é predominante no
fluxo de potência reativa do motor e determinar:
X Mn
3U 2 n
=
QMn
RMn
3U 2 n
=
PFn
2
(34)
2
(35)
A potência aparente no rotor é igual a:
2
S 2 n = P2 n + Q2 n
2
(36)
então, a corrente nominal do rotor pode ser calculada :
I 2n =
S 2n
3U 2 n
(37)
e a resistência nominal e a reatância nominal de dispersão do rotor são determinadas:
R2 n =
X 2n =
S n P2 n
(38)
2
3I 2 n
Q2 n
3I 2 n
(39)
2
Agora, com as estimativas dos parâmetros do circuito equivalente calculados determina-se a impedância
equivalente do motor para o ponto de operação a 50% da carga nominal e, recalcula X 1n ; ou seja:
o
Z Mn = Z Mn = Rm // jX m
Z 250 =
o
R2 n
+ jX 2 n
s50
o
(40)
(41)
o
Z E 50 = Z Mn // Z 250
A impedância do motor é igual a:
(42)
Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006
o
o
Z 150 =
U 1n
(43)
o
I 150
então, calcula-se a impedância dos enrolamentos do estator como:
o
o
o
Z C150 = Z 150 − Z E 50
(44)
Da equação (44) obtém-se:
X 1n = IMAG( Z C150 )
(45)
o
Z C1n = R1n + jX 1n
(46)
A tensão nominal do rotor corrigida pode ser determinada usando a Eq. (25) e as potência reativas do estator são
recalculadas como:
QC1n = 3 X 1n I 1n
2
(47)
e o valor correto da potência reativa do rotor será:
Q2 n = Q1n − QC1n − QMn
(48)
Finalmente, deve-se recalcular as Eq. (34) a (39), concluindo o cálculo dos parâmetros circuito equivalente do MIT
para a região normal de operação.
3.2. Cálculo dos parâmetros do MIT para s=1.0
Com o rotor bloqueado a influência do efeito pelicular nos parâmetros do rotor deve ser analisada, pois nesta
condição a freqüência do rotor é igual a do estator. Na partida do motor, a corrente de magnetização é muito pequena,
comparada com a corrente do estator. Pode-se então, considerar que a corrente do rotor na partida é igual a corrente de
partida do motor, ou seja:
I 2 P = I 1P
(49)
Então, considerado o circuito equivalente, mostrado na Figura 1, sem o circuito de magnetização, concluí-se que:
o
U 1P
o
I 1P =
o
(50)
o
Z 1P + Z 2 P
Com os valores de I 1P e do conjugado de rotor bloqueado, dado pelo catálogo do motor, a resistência do rotor, na
partida, pode ser calculada da seguinte forma:
R2 P =
2πn1
180 I 1P
CP
2
(51)
e a potência transferida pelo entreferro, que é toda transformada em calor é igual a
P2 P = 3R2 P I 1P
2
então, potência total demandada pelo motor, com rotor bloqueado, é igual a
(52)
Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006
2
P1P = 3R1n I 1P + P2 P
(53)
e a potência aparente para a mesma condição é:
S1P = 3U 1 I 1P
(54)
portanto, o fator de potência na partida será:
cos δ P =
P1P
S1P
(55)
o que permite calcular a potência reativa:
Q1P = 3U 1n I 1P senδ P
(56)
e assim, a soma das reatâncias de dispersão do estator e do rotor para s = 1:
X P ≡ X 1P + X 2 P =
Q1P
3I 1P
2
(57)
Para separar X P em X 1P e X 2 P , é necessário verificar a saturação magnética do motor. Admitindo que a
saturação igual para as duas reatâncias de dispersão, a reatância equivalente X P será:
X P = K S ( X '1 P + X ' 2 P )
(58)
K S = fator de saturação;
X '1P = reatância não saturada do estator para s = 1 ;
X ' 2 P = reatância não saturada do rotor para s = 1 .
Para a reatância de dispersão do estator pode-se desprezar a influência do efeito pelicular (enrolamento de muitas
espiras de fio fino), então:
X '1P = X 1n . No entanto, para a reatância de dispersão do rotor é necessário verificar a
influência do efeito pelicular. Assim, a equação (58) deve ser reescrita como:
X P = K S ( X 1n + K X X 2 n )
(59)
sendo:
K X = fator de correção do efeito pelicular para a reatância do rotor.
Portanto, com a Eq. (59) e conhecendo o valor de K X pode-se determinar o fator de saturação K S .
3.3. Cálculo dos fatores de correção devido ao efeito pelicular
Os valores da resistência e reatância do rotor deverão ser corrigidos em função da freqüência da tensão induzida no
rotor. Definindo:
R2 S
R2 n
X
K X ≡ 2S
X 2n
Kr ≡
(60)
(61)
Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006
Pode-se determinar os fatores de correção K X e K r , considerando um rotor de gaiola com barras equivalentes de
secção retangular; como proposto por (Kostenko, 1969; Alger, 1995), são escritas da seguinte forma:
senh2ξ + sen2ξ
cosh 2ξ − cos 2ξ
3 senh2ξ − sen2ξ
KX =
2ξ conh2ξ − cos 2ξ
Kr = ξ
(62)
(63)
Em que:
ξ = Hb π
µ 0 lb
fn.s
ρ lr
(64)
H = profundidade da barra;
µ0
= permeabilidade magnética;
lb , lb = largura da ranhura e da barra, respectivamente;
ρ
= resistividade do material das barras do rotor.
Exceto o escorregamento s , todas as variáveis são definidas pelo projeto do motor, portanto, são constantes para
cada motor. Então, agrupando-as em uma única constante K M obtém-se:
ξ = KM s
(65)
Para s = 1 , tem-se que ξ = K M .
Substituindo as Eq. (60) e (65) em (62) resulta:
R2 P
senh2ξ + sen2ξ
= KM
R2 N
cosh 2ξ − cos 2ξ
(66)
Portanto, com a equação (66) pode-se determinar o valor de K M através de um método numérico e, com as Eq.
(63) e (65), obtém-se o valor de K X , para s = 1 e finalmente, o fator de saturação, que é:
KS =
X 1N
XP
+ K X X 2N
(67)
Todos os dados necessários, no método proposto, são fornecidos pelo catálogo do fabricante do MIT, de acordo
com a (NBR 7094/2001) da ABNT.
4. Desenvolvimento da interface gráfica
O método apresentado anteriormente para o cálculo dos parâmetros do circuito equivalente do MIT foi
implementado em Matlab®. Uma interface gráfica foi desenvolvida para facilitar a entrada dos dados retirados do
catálogo do fabricante e a análise do comportamento dinâmico e em regime permanente do motor de indução trifásico
de rotor gaiola. Todos os resultados são também mostrados em interfases gráficas.
A interface gráfica é composta das seguintes telas:
• Tela de apresentação: contém o nome do projeto, equipe de trabalho e o botão de comando para iniciar as simulações;
• Tela principal: contém as caixas de texto para entrada dos dados de catálogo utilizados para o cálculo dos parâmetros
do circuito equivalente do MIT e simulação da dinâmica do motor. Esta tela contém também um link para o catálogo
do fabricante de motores e um link para a tela que mostra os parâmetros calculados pelo algoritmo implementado
neste trabalho;
Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006
• Tela dos parâmetros: contém o circuito equivalente do MIT e os valores calculados para os mesmos. Outros
parâmetros são apresentados nesta tela, tais como: resistência e reatância na partida, fator de saturação do MIT, e
outros. Esta tela contém também os links para as telas dos resultados dos cálculos em regime permanente e da
dinâmica do motor;
• Tela de resultados para operação em regime permanente: esta tela contém as seguintes curvas: conjugado por
velocidade, conjugado por tempo, rendimento por escorregamento e fator de potência por escorregamento.
• Tela de resultados da simulação dinâmica do MIT: esta tela contém as seguintes curvas: conjugado, corrente ABC do
estator, corrente dq do estator, tensão ABC do estator e velocidade.
• O programa possui uma versão para impressão dos resultados.
Como estudos de caso foram simulados os seguintes motores: 4 CV, 15 CV, 75 CV e 150 CV.
5. Resultados
A Figura 2 mostra a tela de apresentação da interface gráfica. A Figura 3 e a Figura 4 mostram a tela principal e a
tela de parâmetros e fatores de correção, respectivamente. A Figura 5 mostra os erros e a Figura 6 e 7 referem-se às
respostas em regime permanente e a tela da dinâmica do motor, respectivamente.
Figura 2 – Tela inicial
Figura 3 – Entrada de dados de catálogo
Figura 4 - Parâmetros do MIT e fatores de correção
Figura 5 - Erros
Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006
Figura 6 – Operação em regime permanente
Figura 7 – Dinâmica (dq0) do MIT
Na tabela 1, são mostrados alguns resultados da simulação computacional e, os valores calculados são comparados
com os dados de catálogo. Como pode ser verificado, os erros são muito pequenos para os valores correspondentes a
75% e 50% da carga nominal, e erro igual a zero para os valores nominais.
Tabela 1: Resultados e Erros de 4 simulações de motores.
4
Potência nominal [cv]
440
Tensão nominal [V]
60
Freqüência nominal [Hz]
5,85
Corrente nominal [A]
3468
Velocidade nominal [rpm]
0,82
Conjugado nominal [kgfm]
7,8
Corrente de partida / nominal
3,6
Conjugado de partida / nominal
2,87
Conjugado máximo / nominal
Resistência do estator [Ω]
Reatância do estator [Ω]
Resistência de magnetização [Ω]
Reatância de magnetização [Ω]
Resistência do rotor [Ω]
Reatância do rotor [Ω]
Resistência do rotor na partida [Ω]
Reatância do rotor na partida [Ω]
Reatância do estator na partida [Ω]
Fator de saturação do MIT [Ω]
Razão X1 / X2
Constante de projeto do rotor (KM)
Fator de efeito skin (resistência)
Fator de efeito skin (reatância)
Erro de corrente de partida
Erro do conjugado de partida
Erro do fator de potência nominal
Erro do fator de potência a 75 % PN
Erro do fator de potência a 50 % PN
Erro do rendimento nominal
5,3484
15,3614
12,4609
227,4898
5,3997
13,0325
5,3997
5,9342
6,9946
0,45534
15
440
60
19,1
1762
6,13
8,3
2,3
3,1
75
440
60
87,5
1777
30,3
7,7
3,3
2,6
150
440
60
181
1784
60,2
7,6
2,8
2,6
1,9161
4,8637
5,6764
93,303
0,86021
2,2262
1,0311
1,1455
2,6524
0,54535
0,26884
0,84006
1,5227
29,9791
0,11232
0,80662
0,40924
0,25678
0,64858
0,77206
0,09856
0,51444
2,0081
14,6019
0,038343
0,68477
0,16448
0,15482
0,33277
0,64686
1,0415
3,6365
3,6435
0,41232
0,75125
4,2894
4,2896
0,34951
0,17821
-1,556
-1,2336e-14
1,2441
0,57428
0
0,33838
-1,6901
-1,2761e-14
-1,9944
0,37041
0
1,1787
2,1848
0
1,25
1
1,1986
1
0,94356
Erros percentuais
0,58419
0,38804
-0,97508
-1,7835
1,4418e-14
1,291e-14
0,36315
0,26162
0,35647
0,70898
0
1,2602e-14
Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006
0,19905
-0,15317
0,32788
2,1671
Erro do rendimento a 75 % PN
0,40638
0,1295
0,09155
0,20059
Erro do rendimento a 50 % PN
Para a condição situação de rotor bloqueado s = 1 , os erros são aceitáveis mas, são maiores que os obtidos na
região de baixo escorregamento. Algumas razões para estes erros podem ser assim resumidas:
Os dados de corrente e conjugado de partida são mais sujeitos a erros de medida, devido a dificuldades do ensaio de
rotor bloqueado à tensão nominal.
Como prevê na norma (NBR 5356, 1982), o ensaio do rotor bloqueado, deve ser executado para várias posições do
rotor em relação do estator, pois o valor da corrente e do conjugado varia com a posição relativa do rotor em relação ao
estator. Na mesma norma é estabelecido que na folha de dados do motor, deve-se constar o valor máximo da corrente
de partida e o valor mínimo do conjugado de partida, obtidos pelos ensaios.
6. Conclusão
O método apresentado e implementado neste trabalho permite a análise do comportamento e desempenho do motor
de indução. É uma ferramenta adequada para simulação de acionamentos elétricos com o objetivo de melhorar a
especificação dos motores, de modo a assegurar uma maior eficiência energética. Podemos citar, por exemplo, a
facilidade de a partir de dados de catálogo comparar a eficiência de motores de fabricantes diferentes, ou até a relação
custo beneficio entre um motor padrão e um motor de alto rendimento.
Em relação aos erros, é necessário destacar que todos são inferiores às tolerâncias admitidas pela ABNT, nos
resultados de ensaios de motores de indução.
Na parte final do projeto, foi estudada e implementada a modelagem do MIT no domínio do tempo, através de um
modelo dinâmico de coordenadas dq0.
Deve-se destacar que o modelo dinâmico dq0 do MIT veio permitir, a partir dos anos 90, um grande
desenvolvimento tecnológico na área de controle e acionamentos elétricos como, por exemplo, o desenvolvimento dos
inversores de freqüência de controle vetorial. Entretanto, a implementação do modelo dq0 exige o conhecimento dos
parâmetros do circuito equivalente do motor, o que vem valorizar ainda mais a método de cálculo de parâmetros
apresentado.
7. Referências
Alger, P.L., 1995 “Induction Machines: Their Behavior and Uses (Hardcover)”, Ed. Taylor & Francis, 2nd edition,
528p.
Assunção; J. T., 1990 “Análise e Especificação de Motores de Indução Trifásicos com Rotor Tipo Gaiola
Controlados Através do Valor Eficaz e Freqüência da Tensão do Estator”, Escola Federal de Engenharia de Itajubá.
Dissertação de mestrado em Engenharia Elétrica.
Cad, M. M., 2000, “Estratégias de Modelagem Dinâmica e Simulação Computacional do Motor de Indução
Trifásico”, Escola de Engenharia de São Carlos. Tese de mestrado em Engenharia Elétrica.
Chalmers, B. J. and Mulki, A. S., 1970, “Disighn Synthesis of Doublé-Cage Induction Motors”, IEE, pp 12571263.
Fitzgerald, A. E., Kingsley, Charles Jr., Umans, S. D, 2003, “Electric Machinery”, McGraw-Hill, 6ª ed, New York.
Kostenko, M; Kingsley.C. Jr and Kusko, A, 1969, “Eletrical Machines”, Ed. Mir Publishers, Moscow.
Krause; P. C. and Wasynczuk ; O., and Sudhoff; S. D., “Analysis of Electric Machinery”, 1995, IEEE Press, New
York, 564p.
Lobosco, O.S. e Dias, J. L. P. C, 1988, “Seleção e Aplicação de Motores Elétricos”, Ed. McGraw-Hill : Siemens
AS, São Paulo, 351p.
Norma Técnica: NBR5383, 1982, “Máquinas elétricas girantes – Máquinas de Indução – Determinação das
Características”, ABNT.
Ong, Chee-Mun, 1997, “Dynamic Simulation of Electric Machinery – Using Matlab/Simulink”, Ed. Prentice Hall
PTR.
Revisão da NBR 7094/1996 , 2003, "Máquinas elétricas girantes - Motores de indução - Especificação", ABNT.
Shindo, Reinaldo, 2003, “Cálculo dos parâmetros do Motor de Indução Trifásico Utilizando o Método dos
Elementos Finitos”, UFRJ/COPPE , Tese de Mestrado.