Depto de Engenharia Mecânica
da UFPE
Introdução à
Engenharia da Motocicleta
Fábio Magnani e Ramiro Willmersdorf
2010
Parte 2: Ciclística
Seção 03
ATITUDE
• Forças e Equilíbrio;
– Potência necessária para o movimento;
– Força de Tração;
– Frenagem;
• Transmissão de forças;
– Correntes;
– Frenagem;
Potência
Potência necessária: P = (FR + FA) v
v : velocidade de deslocamento
FA: resistência aerodinâmica
FR : resistência ao rolamento
Termo extra na subida: m g sin(θ)
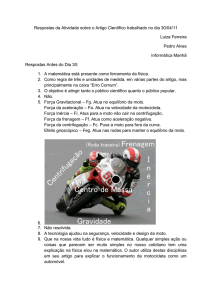
Na Subida
Podemos subir
qualquer ladeira,
dado motor
suficiente?
Potência Utilizável
• Limite de adesão
– Quanta potência do motor é transmitida
para o solo;
• Limite de tombamento
– Equilíbrio dinâmico da motocicleta;
Motocicleta Parada
Em movimento
R: aceleração+
aerodinâmica
Sem lift ou resistência
ao rolamento.
Kawasaki Ninja H2R
Ducati MotoGP 2015
Em movimento
Considerando a força de tração variável, as
duas forças são funções lineares em T.
Normalizando em relação ao peso
Em movimento – Exemplo
Ângulo de Transferência de
Peso
Para que haja equilíbrio,
as forças devem
cancelar-se.
Massa Equivalente
Massa Equivalente
A energia cinética em rotação é
A energia cinética em translação é
Igualando as energias cinéticas para velocidades
correspondentes encontramos a massa
equivalente.
Massa Equivalente
Definindo o coeficiente cinemático
A massa equivalente é
Massa Equivalente
Para a motocicleta completa, a massa equivalente é
Coef. de Velocidade
Rodas dianteira e traseira
Árvore secundária
Árvore primária
Coef. de Velocidade
Motor
Resumindo
Não é constante!
Exemplo: dados
Exemplo: calcula-se
Exemplo: calcula-se
Limite de Adesão
A força de tração é limitada pelo deslizamento
A normal na roda traseira é neste caso
Limite de Adesão
Considerando a aceleração e a força de arrasto
A aceleração máxima é
Limite de empinamento
Aceleração Limite
Observação importante: se
Aceleração Limite – Exemplo
Calcular aceleração limite a 0 e 100 km/h
Aceleração Limite – Exemplo
Calcular aceleração limite a 0 e 100 km/h
Equilíbrio
É necessário
manter a projeção
do peso na
impressão do
pneu traseiro.
Limite de Tombamento
A máxima
inclinação ocorre
quando a
projeção do peso
passa do ponto de
contato da roda
traseira.
Carros X Motos
Carro X Motos
Na Frenagem
• Exatamente o mesmo efeito ocorre,
com a mudança de sinal;
• A reação aumenta na roda dianteira, e
diminui na roda traseira;
• Por isto, freios dianteiros muito mais
potentes que traseiros;
• Existe uma desaceleração máxima
para a qual a normal na roda traseira
é nula (“stoppie”);
Frenagem
Repetindo o raciocínio, “ao contrário”
Força de Frenagem
Força máxima
Força típica
Força de Frenagem
Se o coeficiente atrito é igual
As normais tornam-se
E, normalizadas
Frenagem – Exemplo
Efeitos do Freio
Estabiliza
Desestabiliza
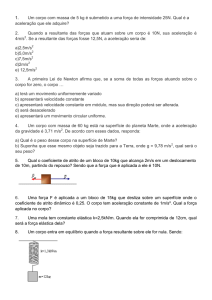
Stoppie
Está na hora
de aliviar o
freio
dianteiro!
Stoppie
A tendência a “empinar” a
traseira é maior para motos
com o CG mais alto.
Stoppie
Considerando a resistência aerodinâmica
Frenagem Máxima
Considerando um “monociclo”
Frenagem Máxima
Para as duas rodas
Frenagem Máxima
Curiosamente,
depende da
geometria, atrito e
não da massa da
motocicleta!
Frenagem Máxima
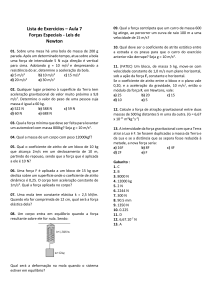
Distribuição de Forças
Para o mesmo coeficiente de atrito
Frenagem Máxima – Exemplo
Frenagem Máxima – Exemplo
Mesmo
coeficiente
de atrito
Frenagem Máxima – Exemplo
Neste caso nunca é
melhor usar mais o
freio traseiro.
Observações
• Motos com grande ângulo de
transferência de peso são mais ágeis;
• O piloto mais facilmente controla a
distribuição de peso, com acelerador
e freios;
• O piloto claramente pode minimizar
estes efeitos com a sua própria
movimentação;