Mecânica e Ondas
Taguspark
Cursos LETI e LEE
Capítulo I – Interacção mecânica
Lei da atracção gravitacional de Newton
Se considerarmos duas massas pontuais m1 e m2 , a uma distância r entre si, vai haver
uma força de atracção gravitacional entre elas dada por:
mm F = −G 1 2 2 er .
r
O sinal − significa que é atractiva. É uma força radial variando o seu módulo com o
inverso do quadrado da distância entre si. A constante de gravitação G vale, no sistema
internacional,
−11
G = 6.67 *10 Nm 2 Kg −2 .
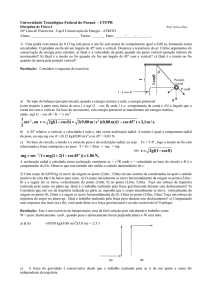
Na figura usou-se um
referencial qualquer para
localizar as duas massas.
r1 e r2
Representam
o
vector de posição das
massas
1
e
2
respectivamente.
Note-se
que F2,1 = − F1,2 significando
que a força com que 2 atrai 1 é simétrica da força com que 1 atrai 2. O módulo de
r1,2 representa a distância entre as duas massas. Neste referencial a força de atracção
m1 m2 F
=
−
G
r1,2 .
3
escreve-se: 1,2
r1,2
Se pelo menos uma das massas não for pontual à que alterar a fórmula anterior de modo a
representar apenas a contribuição de uma massa elementar e depois integrar para todo o
corpo:
dm1 m2 m dF1,2 = −G 3 r1,2 ⇒ F1,2 = ∫∫∫
−G 32 r1,2 dm1
corpo1
r1,2
r1,2
Duma maneira geral a expressão anterior pode ser de difícil aplicação a corpos com
geometrias complicadas. Alguns casos têm no entanto soluções matemáticas fáceis de
resolver. É o exemplo da geometria esférica.
Quando o corpo tiver simetria esférica e estivermos a calcular a força sobre uma
massa pontual no seu exterior podemos colocar toda a massa no centro da esfera e calcular
a força entre o centro da esfera e o corpo exterior.
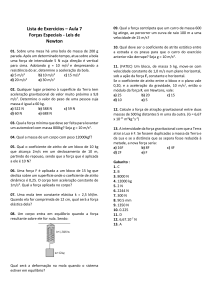
É o caso da Terra se a considerarmos
redonda. Ao colocarmos um objecto pontual de
massa m a uma altura h da superfície podemos
colocar toda a massa da Terra M Terra no seu
centro e calcular a atracção sobre a massa m
que está à distância r = RTerra + h .
F = −G
M Terra m
( RTerra + h )
2
er .
O módulo desta força representa o peso do corpo m em relação à Terra.
Se a altura h for pequena comparada com o raio da Terra RTerra podemos dizer que a soma
se simplifica RTerra + h RTerra e um peso simplificado:
P=G
M Terra m
( RTerra + h )
2
≅G
M Terra
m.
2
RTerra
Notar que, nestas circunstâncias, o peso de um objecto próximo da superfície só
depende da sua massa e da massa e raio da Terra que são constantes. Conhecendo os
dados da Terra M Terrra 5.97 *10 24 Kg e RTerrra 6371 Km e a constante universal G podemos
calcular o factor constante, que denominamos g , e tem as dimensões de uma aceleração
(derivada da velocidade):
g =G
M Terra
≅ 9.8 m / s 2
2
RTerra
.
Obtém-se assim a conhecida expressão para o peso de um corpo à superfície da
.
Terra: P = mg É esta expressão que usaremos extensivamente na 1ª parte do curso.
Outros casos, de interesse apenas didáctico, podem ser resolvidos. É o caso de uma
barra uniforme com o corpo pontual colocado no seu eixo longitudinal ou transversal.
--------------------------------------------------------------------Exemplos de cálculo da força gravitacional
(voltaremos a estes problemas num capítulo mais à frente
dedicado ao estudo da gravitação)
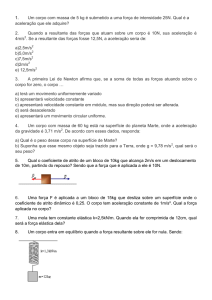
--------------------------------------------------------------------Problema: Calcular a força
gravitacional exercida por uma vara uniforme
de comprimento L e massa M sobre uma
massa pontual m colocada sobre o eixo da
vara e a uma distância d de uma das
extremidades.
2
M
. Colocando a origem dos x no centro da barra
L
contribuição
de
um
troço
elementar
dx ,
A barra tem uma densidade linear λ =
podemos
achar
a
dF = −G
d
L
+
mλ dx
L
d + − x
2
2
⇒F=
L
2
∫ −G
−
L
2
mλ dx
L
d + − x
2
2
L
dx
M
λ=
2
−2
L
1
mM
= −Gmλ ∫ d + − x dx = − Gmλ
= −G
2
d (d + L)
L
d + L − x
−
2
2
− L
m
M
L
+
L
2
2
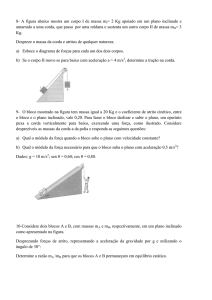
-------------------------------------------------------------------------------------------Problema: Calcular a força gravitacional exercida
por uma vara uniforme de comprimento L e massa M sobre
uma massa pontual m colocada sobre um eixo passando pelo
seu centro e perpendicular à vara, distando d da vara.
M
. Colocando a origem
L
dos y no centro da barra podemos achar a contribuição de um
troço
elementar
dy ,
A barra tem uma densidade linear λ =
+
mλdy
dF = −G
(d
2
+y
3
2 2
)
d ⇒F =
L
2
(
2
2
∫ −Gdmλ d + y
−
L
2
)
−
3
2
Mm
dy = −G
2
d
2
L
1−
2d
--------------------------------------------------------------------A noção de força gravítica implica a existência de dois corpos, acção de um corpo
sobre o outro corpo. Que acontece se retirarmos um dos corpos? Deixa de haver força mas
mantém-se uma realidade física que é diferente de não haver corpo nenhum. A essa
realidade chamamos Campo gravítico.
Assim a Terra isolada no espaço cria o seu próprio campo gravítico. Quando
colocarmos um corpo na proximidade da Terra este vai sofrer uma força. Para que ele não
caia temos de fazer uma força igual e contrária.
Se o deixarmos livre ele vai deslocar-se e aproximar-se da Terra, isto significa que a
força gravítica realiza sempre um trabalho positivo ou seja o corpo passa de um estado de
energia mais alta para um estado de energia mais baixa. A esta energia chamamos energia
potencial gravítica.
À noção de Campo gravítico temos de juntar a de Potencial gravítico. Quando
colocarmos um corpo na proximidade da Terra este desloca-se de um potencial gravítico
mais alto para outro mais baixo fazendo baixar a sua energia potencial gravítica.
Formalmente basta multiplicar pela massa para se passar de campo para força e de
potencial para energia potencial.
F = mE U = mV ; F → Força
E → Campo U → Energia potencial V → Potencial
A primeira relação permite identificar o Campo gravítico, F = mE ≡ P = mg ⇒ E = g .
O campo gravítico coincide com a aceleração gravítica.
3
Para identificar o potencial temos de recorrer à noção de trabalho da força dW = F • ds .
Usemos a Terra, isolada no espaço, como exemplo. No infinito o campo é nulo portanto o
potencial também tem de ser nulo (não há interacção). Se deslocar um corpo de massa m
do infinito até um ponto P à distância d do centro da Terra realizo um trabalho positivo
(força e deslocamento alinhados) ∆W > 0 , no entanto a energia potencial diminui ∆U < 0 .
Concluímos assim que o trabalho da força gravítica é simétrico da variação da energia
d
Mm
Mm
potencial. dU = − F • ds ⇒ U = − ∫ G 2 dr = −G
. Obtém-se a expressão geral, para
−∞
d
r
Mm
massas pontuais ou distribuição esférica, da energia potencial gravítica U = −G
.
r
Para a Terra, um corpo de massa m a uma altura h da superfície tem uma energia
MT
RT2
potencial U h = −G
m=−
mg . Quando cai de h até à superfície passa a ter
RT + h
RT + h
U 0 = − mgRT . Se fizermos a diferença de energias:
RT2
U h − U0 = −
mg − ( − mgRT ) = mgRT
RT + h
RT
h
.
1 −
= mgRT
RT + h
RT + h
Quando a altura é pequena quando comparada com o raio da Terra a expressão simplifica e
h
obtemos um fórmula bem conhecida do ensino secundário U h − U 0 = mgRT
≅ mgh .
RT + h
Conclui-se portanto para a fórmula U = mgh frequentemente usada:
I. A fórmula só é verdadeira para alturas muito menores que o raio da Terra.
II. Representa de facto, não a energia, mas sim a diferença de energia potencial de um
corpo de massa m à altura h e à altura zero.
III. A energia potencial à superfície da Terra vale: U 0 = − mgRT
É por esse facto que usaremos esta expressão extensivamente na 1ª parte do curso.
As Leis de Newton
A Lei da atracção universal não foi a única contribuição de Newton para o
desenvolvimento da Mecânica. Existem três leis fundamentais que enquadram toda a
Mecânica newtoneana. A Lei fundamental da dinâmica, a Lei da inércia e o Lei de
Relatividade do movimento ou Princípio da acção reacção.
A lei fundamental liga a força com o movimento. Do ponto de vista da Mecânica de
Newton esta pode ser dividida em três grandes Capítulos: Estática, Cinemática e Dinâmica.
Na Estática só temos Forças, não há movimento.
Na Cinemática só há movimento, esquecemos as forças que lhe deram origem.
Na Dinâmica temos em simultâneo o movimento e as forças que o originaram.
Matematicamente a Lei é formalmente simples, diz que a resultante das forças que actuam
num corpo é proporcional à aceleração do corpo, sendo a massa a constante de
proporcionalidade, ∑ F = ma . A complexidade advém do facto da aceleração ser a segunda
derivada do vector de posição, o que transforma a lei numa equação diferencial de segunda
ordem que tem de ser resolvida para se saber a equação do movimento do corpo. De notar
4
nesta lei que força e aceleração estão no mesmo referencial e são vectores com a mesma
direcção e sentido.
É claro que, dada a dificuldade apresentada pela generalidade dos alunos na
resolução matemática destes modelos, procuraremos encontrar exemplos de aplicação de
menor complexidade matemática não deixando de ser significativos para aprender
Mecânica.
A Lei da inércia é uma consequência da lei fundamental. Diz que se não existir força
resultante o corpo está em repouso ou em movimento rectilíneo uniforme.
Da lei ∑ F = ma tiramos facilmente: ∑ F = 0 ⇒ a = 0 ⇒ v = C te
A Lei de Relatividade põe em evidência que, se um corpo actuar sobre um segundo,
esse também actua sobre o primeiro. Ou seja, a toda a força de acção vai corresponder uma
força de reacção exactamente igual em módulo mas de sentido contrário F = − R . Muitas
vezes designam-se estas duas forças por par acção reacção. Já no próximo item vamos ver
exemplos destes pares acção reacção, forças de tensão e forças de contacto.
Este princípio de relatividade aplicado ao movimento impõe a distinção entre dois
tipos de referenciais, de inércia e acelerados. Se um corpo não for actuado por uma força
pela lei de inércia haverá um conjunto de referenciais onde está em repouso ou em
movimento uniforme rectilíneo. Esses são os referenciais de inércia. Se descrever esse
movimento num referencial acelerado o corpo vai adquirir uma aceleração e portanto, tendo
massa, sofre uma força dita de força de inércia, (deveria dizer-se força de não inércia).
As diferentes Forças
1. Força gravítica
Como se viu anteriormente próximo
da superfície da Terra (alturas muito
menores que o raio da Terra) podemos
escrever P = mg . Esta força é sempre
para baixo e pode ser medida usando uma
mola. Quer esteja suspenso, alongando a
mola ou contraindo a mola, o seu valor
mantém-se constante.
2. Força de tensão
a. Força elástica de
uma mola.
y
l0
x
Como se viu na figura anterior, por
acção do peso a mola alonga ou contrai dando
origem a uma força de tensão que tende a
anular o peso. Esta é a força elástica da mola.
Das duas figuras anteriores podemos concluir
que, se o corpo está em equilíbrio (repouso),
K
N
0
x
−T
T
F
5
os módulos das duas forças são iguais: Fmola = mg .
Na figura ao lado a mola está inicialmente em repouso na horizontal. Não sofre a
acção de qualquer força e por isso dizemos que o seu comprimento em repouso é l0 .
Colocámos a sua extremidade livre no ponto x = 0 . Exercemos então a força F para a
direita. A mola vai alongar x , quer dizer que a sua extremidade passou a estar no ponto x .
A mola vai reagir a F com uma força de tensão T , exactamente igual em módulo mas de
sentido contrário. Se a mola estiver em equilíbrio a soma vectorial das duas forças é zero,
T = − F ⇒ F + T = 0 . Na extremidade oposta, presa à parede, aparece uma força oposta, isto
é, se em x está T na extremidade da parede está −T ou seja F . Fica também claro que a
parede tem de fazer uma força igual a N = T para não ceder. Veremos um pouco à frente
que esta é uma força de contacto normal.
Só não estabelecemos uma relação entre a força elástica T e o alongamento x .
Veremos num capítulo mais à frente que esta força elástica é proporcional ao alongamento
da mola T = − Kxex , permitindo quantificar e perceber o movimento oscilatório. A constante
K é característica da mola.
b.
Força de tensão num fio inextensível.
Tal como numa mola se actuarmos
com uma força sobre um fio inextensível
este vai reagir com uma força igual e de
sentido contrário, a Tensão no fio, que o vai
manter esticado.
F
Na figura ao lado uma vara ou corda
inextensível tem uma extremidade fixa a um
corpo e na outra extremidade é exercida
uma força F . Nessa extremidade aparece
uma força de tensão T , exactamente igual em módulo mas de sentido contrário. Em
equilíbrio a soma vectorial das duas forças é zero, T = − F ⇒ F + T = 0 . Na extremidade
oposta, presa ao corpo, aparece uma força oposta, isto é, −T ou seja F . Fica também claro
que a parede tem de fazer uma força igual a N = T para não ceder. Veremos um pouco à
frente que esta é uma força de contacto normal.
N
−T
T
3. Forças de contacto
a. Força Normal
Quando dois corpos estão em contacto, independentemente de haver ou não
movimento relativo entre si, existe uma força de contacto entre as duas superfícies. Essa
força é denominada de força Normal exactamente porque ela é perpendicular à superfície
de contacto. Quando estamos de pé no soalho de nossas casa o nosso peso exerce-se
verticalmente sobre o chão. Porque não entramos pelo chão
m
dentro? Porque o chão exerce sobre os nossos pés uma força
vertical para cima exactamente igual ao nosso peso. Essa é a
força Normal.
Na figura ao lado o corpo de massa m está em equilíbrio
mg
N
em cima de uma placa fixa.
N = mg
−N
6
Sobre ele actuam duas forças o peso e a força Normal. A sua soma tem de ser zero porque
não há movimento na vertical, N + mg = 0 ⇒ N = − mg ⇒ N = mg .
A normal é igual ao peso.
De notar que sobre o chão actua o par acção reacção, a força − N .
O que acontece se houver mais de um corpo?
O problema resolve-se de maneira idêntica. Onde existe contacto existe normal, a condição
de equilíbrio estático determina o módulo dessa normal.
Na figura seguinte o corpo 2 assenta sobre o corpo 1 que
Corpo 2
m2
por sua vez assenta sobre uma laje. Temos de escrever
uma equação para cada corpo:
m2 g
Para o corpo 2 temos: N 2 + m2 g = 0 , obtemos o módulo da
Corpo 1
sua normal N 2 = m2 g , que é, tal como no problema anterior,
N2
igual ao seu peso.
m1
−N2
Para o corpo 1 temos: N1 + m1 g − N 2 = 0 , aqui a normal 1
mg
N1
depende não só da sua massa mas também da normal 2
− N1
calculada antes. Simplificando obtemos: N1 = ( m1 + m2 ) g . A
normal é igual a soma dos dois pesos, como seria de
esperar.
Notar ainda que sobre a laje actua a normal − N1 .
1
Vejamos um outro exemplo.
O que acontece quando a superfície de contacto não é perpendicular ao peso?
A força normal é sempre perpendicular à superfície de contacto de modo que é necessário
calcular a componente do peso perpendicular à superfície de contacto.
Na figura ao lado o corpo está assente sobre um plano
Corpo 1
inclinado de ângulo θ . Não interessa por agora se o corpo está
ou não em movimento porque, mesmo que o movimento
mg cos θ
exista, ele será sempre ao longo do plano inclinado e nunca
mgsenθ
afastando-se do plano (direcção normal ao plano).
N
θ
mg
A superfície de contacto faz um ângulo θ com a horizontal de
−N
modo que é necessário decompor o peso nas duas
componentes, paralela ao plano e perpendicular ao plano.
θ
Trigonometria
simples
permite
escrever
mg = mgsenθ e + mg cos θ e⊥ . A componente normal do peso vale mg cos θ , pelo que podemos
calcular a força normal: N + mg cos θ e⊥ = 0 ⇒ N = mg cos θ . De notar que o plano inclinado
sofre também uma força normal − N , que é o par acção reacção.
b. Forças de Atrito entre sólidos.
A força de contacto anterior existe desde que haja contacto entre dois corpos
independentemente de haver ou não movimento e exerce-se sempre na direcção
perpendicular ao possível deslizamento.
Todos temos contudo a noção de que quando temos um corpo rugoso em contacto
com outro é necessário exercer uma força superior, para o fazer deslocar, do que se os
corpos forem polidos. Trata-se agora de uma força de contacto na direcção do movimento
7
mas que se opõe a esse movimento, é a força de Atrito. A força de atrito é portanto
perpendicular à força Normal que acabámos de estudar, sempre paralela à superfície de
contacto e de sentido contrário ao possível movimento. No entanto este atrito está
relacionado com a força normal. Quanto maior for a força normal maior é o “aperto” entre os
dois corpos e portanto maior a dificuldade em deslizar um sobre o outro. A força de atrito é
portanto proporcional à força normal, Fat = µ N . À constante de proporcionalidade µ entre
as duas chamamos coeficiente de atrito. À contudo que distinguir duas situações físicas
distintas, o atrito estático e o atrito dinâmico.
Dizemos que temos atrito estático quando se exerce força sobre o corpo mas ele não
se move. Se fomos aumentando essa força haverá um momento em que o corpo começa a
deslizar embora com força de atrito. É exactamente essa força a partir da qual se inicia o
movimento que define o coeficiente de atrito estático.
Denominando-a Fs , podemos escrever Fs = µ s N .
m
Tomemos de novo o bloco usado no início. Sobre
ele vamos fazer actuar uma força F , que se inicia no zero
e vai aumentando gradualmente.
F
Inicialmente o bloco não se move. Porquê?
Aparece uma força de atrito que anula a força exercida,
mg
N
Fat = F . Quando a força F exercida iguala µ s N o bloco
Fat
começa a mover-se e a força de atrito é constante e vale
− Fat N = mg
Fat = µ N .
−N
Este novo coeficiente de atrito, denominado de cinético, é
inferior ao estático, significando fisicamente que é mais “fácil” manter o bloco em movimento
do que iniciar o movimento. Resumindo:
se F ≤ µs N ⇒ Fa = F ⇒ não há movimento
se F >µ N ⇒ F = µ N ⇒ há movimento com atrito
s
a
k
Note-se ainda que existe um par acção reacção para esta força de atrito, é uma força
igual e de sentido contrário exercida sobre o corpo debaixo.
4.Forças de Inércia em referenciais acelerados.
a. Força de Inércia em translação.
Quando nos deslocamos numa viatura e esta acelera sentimo-nos empurrados para trás, se
ela travar sentimo-nos projectados para a frente.
Terra
Consideremos o exemplo da figura. O vagão de
massa M da figura move-se, por acção da força
m
F
, no referencial Terra com uma aceleração a . O
a
N
a
corpo de massa m está dentro do vagão,
Fi
encostado à parede, move-se com este e tem
F
portanto a mesma aceleração em relação à Terra.
Entre o corpo e o vagão existe contacto e portanto
Fi = − N = −ma
uma força normal N . Será que podemos ter
N = 0 ? Obviamente não, porque a lei fundamental exige ma = ∑ F . Se ∑ F = 0 então
8
a = 0 , o que é falso. Só existe uma solução, N = ma . Isto significa, pelo princípio da acção
reacção, que o corpo actua sobre a parede com uma força − N = − ma . Esta força só
aparece porque o vagão está acelerado, é a força de inércia, Fi = −ma . Se quisermos a
equação do vagão devemos escrever:
F
Ma = F + Fi = F − ma ⇒ ( M + m ) a = F ⇔ a =
.
M +m
A força F tem de puxar as duas massas.
b.
Força Centrífuga.
Quando um ponto material descreve uma trajectória curvilínea adquire uma
aceleração perpendicular à trajectória dirigida dentro da concavidade, é a aceleração
centrípeta. Ver apêndice relativo a coordenadas polares.
Ao colocarmos um corpo em trajectória circular estamos a colocá-lo num referencial
acelerado. Pelo princípio da acção reacção, como vimos no ponto anterior, ele vai ter uma
aceleração contrária à do referencial, centrífuga, que multiplicada pela sua massa dá origem
à força centrífuga. Quando descrevemos uma curva na viatura, mesmo em velocidade
constante, somos empurrados para o lado de fora da curva.
Em movimento circular uniforme a força centrífuga tem a expressão simples:
v2 v2
Fcentrifuga = macentrifuga = m er ⇒ Fc = m
r
r
-----------------------------------------------------------------------------------------
Apêndice – Coordenadas Polares
Quando queremos descrever um movimento curvilíneo num plano é usual utilizar em vez
das habituais coordenadas rectangulares ( x, y ) com versores ( ex , e y ) , usar as coordenadas
polares ( r ,θ ) com versores ( er , eθ ) . Embora ortonormadas estas coordenadas exigem um
cuidado especial porque as derivadas dos seus versores não são nulas, os versores variam
de ponto para ponto. Isto implica que grandezas como a velocidade e aceleração tenham
expressões mais complexas. Vejamos o sistema da figura.
O sistema que permite passar de rectangular para polar escreve-se
y
er = cos θ ex + sin θ ey
E as derivadas ficam:
e
θ
eθ = − sin θ ex + cos θ ey
dθ der dθ
e
=
−
sin
e
+
cos
e
=
e
θ
θ
x
(
)
x
y
θ
er
dt
dt
dt
.
θ
x
deθ = dθ ( − cos θ e − sin θ e ) = − dθ e
e
x
y
r
y
dt
dt
dt
9
Vector de posição
O vector de posição escreve-se
. Existem duas velocidades, a angular de
r = rer
Velocidade angular
e a linear
módulo
dθ
ω=
dt
Velocidade linear
. Simplificando
v = dr = dr er + r der = dr er + r dθ eθ
dt dt
dt
dt
dt
Velocidade linear
. Para se chegar à aceleração devemos derivar novamente
esta obtém-se dr v = er + rω eθ
dt
Aceleração
2
2
dθ deθ d 2 r
d 2θ .
dθ dr dθ
dv d r dr der d dθ a = dt = dt 2 er + dt dt + dt r dt eθ + r dt dt = dt 2 − r dt er + 2 dt dt + r dt 2 eθ
Aceleração
Reagrupando temos: d 2 r
dr
dω .
2
a = 2 − rω er + 2ω
+r
eθ
dt
dt
dt
Movimento circular de raio R
Se o movimento for circular o raio é constante, r = R = C te . A velocidade linear fica
Aceleração
Velocidade linear
simples
e a aceleração vem d ω . A velocidade é
2
v = Rω eθ
a = ( − Rω ) er + r
eθ
dt
puramente tangencial enquanto a aceleração pode ter componentes radial e tangencial.
Movimento circular uniforme
Um caso particular mas usual de movimento circular é o circular uniforme (velocidade
em módulo constante). As duas expressões acima ficam:
Aceleração
Velocidade linear
2
e a = − Rω 2 e = − v
v
=
R
ω
e
θ
r
R
(
)
er
Concluímos que a velocidade linear é tangencial e vale em módulo v = ω R enquanto a
v2
aceleração é radial e para dentro, centrípeta, valendo a =
= ω2R
R
--------------------------------------------------------------------------------------------
10
5. Momento da Força
O que acabámos de aprender sobre movimento curvilineo e força centrífuga leva a outra
questão: Será que o facto da resultante das força sobre um corpo ser zero garante a não
existência de movimento desse corpo? A lei da inércia só garante que existe um referencial
onde não há translação. No entanto, se o corpo tiver um ponto de apoio sobre outro pode
não ter translação mas ter rotação, o que significa que não está em equilíbrio estático.
Vejamos um pequeno exemplo com uma vara apoiada no chão. Se estiver perfeitamente
na vertical ficará em equilíbrio mas se fizer um ângulo com a vertical sabemos que roda e
tomba. O que se altera em termos de forças nos dois casos? O peso na vertical para baixo é
o mesmo e a força normal do chão sobre a vara para cima igualando o peso também. A
soma é nula mas num caso há rotação.
A grandeza física associada à rotação não é a força mas sim o momento da força. Para
fazermos rodar uma porta não basta fazer uma força, é preciso que a direcção da força não
passe pelo eixo da porta. A definição de momento da força, nalguns livros apelidada de
torque, contém três informações: a força, o braço da força (vector distância do ponto ou eixo
de rotação à força) e o ângulo entre os dois.
O momento é dado pelo produto externo entre o braço e a força: τ = r × F . O módulo
vem τ = r.Fsenθ . O resultado de um produto externo é um vector perpendicular ao plano dos
outros dois e segue a regra da mão direita. (Se os dedos da mão direita seguirem o sentido
da rotação o polegar segue o momento da força).
F
θ
Na figura colocámos uma vara de comprimento L apoiada no chão e
fazendo um ângulo θ com ele. Aplica-se uma força F horizontal na
extremidade superior da vara. Esquecendo o atrito, existem três forças a
actuar.
A força normal tem momento nulo porque passa pelo ponto de apoio
(braço nulo).
L
N
mg
O peso actua no centro da vara e faz com ela um ângulo complementar a θ . Tem
L
momento: τ peso = −mg cos θ ez . Rotação segundo os ponteiros do relógio.
2
A força F actua na extremidade, faz um ângulo θ com a vara e tem momento:
τ F = FLsenθ ez . Rotação no sentido contrário aos ponteiros do relógio.
A condição de equilíbrio estático é que o momento total seja nulo
Neste caso bastava igualar FLsenθ = mg
∑τ = 0 .
L
mg
cos θ ⇒ F =
.
2
2tgθ
11
Exemplos relativos à Estática É preciso garantir: 1) a resultante das forças que actuam no corpo seja zero: Ftotal = ∑ Fk = 0
k
É preciso garantir: 2) a soma dos momentos das forças seja zero: τ total = ∑ r × Fk = 0
k
Exemplo 1
A vara da figura, de massa desprezável, suporta uma
massa M e está ligada à parede vertical por um fio
horizontal.
1) Sabe-se que a tensão máxima que o fio suporta é 56 N,
qual é o peso máximo que podemos suspender?
2) Se suspendermos um peso de 15 N qual deverá ser o
coeficiente de atrito estático mínimo da vara para haver equilíbrio?
M
Resolução:
Comecemos por fazer o diagrama de forças do sistema. Temos de satisfazer as duas
condições de equilíbrio para a vara: Soma das forças
igual a zero e soma dos momentos igual a zero
Mg
Soma das forças igual a zero:
T
T
Na horizontal T + Fa = 0 ⇒ T = Fa
M
Na
vertical
N
+ Mg = 0 ⇒ N = Mg
N
Soma dos momentos igual a zero:
Fa
bT × T + bMg × Mg = 0
Para resolver a pergunta 1 basta pegar na equação para os momentos.
Fio: A força é a tensão T . O braço vale 5 m. O ângulo entre o fio e a vara pode ser
3
calculado por senθ = .
5
Massa: A força é o peso Mg . O braço vale 7 m. O ângulo com a vara é complementar de
2
4
3
3
θ , senα = cos θ = 1 − = a vara pode ser calculado por senθ = .
5
5
5
Para haver equilíbrio a momento total tem de ser zero.
3
4
15
15
15
T .5. = Mg .7. ⇒ Mg = T ⇒ ( Mg ) max = Tmax = .56 = 30 N
5
5
28
28
28
Para resolver a pergunta 2 basta ir à equação das forças na horizontal.
Fa = T =
28
Mg = 28 N . Esta é a força de atrito necessária para o equilíbrio.
15
Sabemos que a força de atrito máxima é dada por Fa max = µs N e neste caso N = Mg .
28
Concluímos que: 28 = µ s Mg = 15µ s ⇒ µ s =
15
12
Exemplo 2
O sistema físico da figura está em equilíbrio estático. Duas
massas distintas, m e M , estão suspensas por 3 fios e uma
roldana.
Conhecem-se os dois ângulos θ e ϕ , e conhece-se a
massa M .
As perguntas são:
1.
2.
3.
4.
5.
6.
Qual a tensão T2 no fio?
Qual a tensão T1 no fio?
Qual a tensão T3 no fio?
Qual o valor de m?
Qual a força normal que o fio 3 exerce no tecto?
Qual a força normal que a roldana exerce no tecto?
θ
ϕ
M
Neste exemplo não há possibilidade de rotação. O equilíbrio implica que em qualquer ponto
a soma das forças tem de ser zero. Notamos que o ponto crucial para resolver o problema é
o ponto O, união simultânea dos 3 fios.
Comecemos por fazer o diagrama de forças do
sistema.
θ
Comecemos por escrever as forças no ponto O:
N
T3
T3 = T3 cos θ ex + T3 senθ ey
T1
T1
T
=
−
T
cos
+
e
+
T
sen
+
e
ϕ
θ
ϕ
θ
(
)
(
)
1
1
x
1
y . A soma deve
ϕ
T2 = − Mgey
T1
T
T1
3
ser
T2
mg
M
nula
T3 cos θ ex − T1 cos (ϕ + θ ) ex = 0
⇒
T3 senθ ey + T1 sen (ϕ + θ ) e y − Mgey = 0
cos (ϕ + θ )
T3 = Mg
T3 cos θ = T1 cos (ϕ + θ )
senϕ
⇒
A
T3 senθ + T1 sen (ϕ + θ ) = Mg
T = Mg cos θ
1
senϕ
resolução permite responder às 3 primeiras questões:
cos (ϕ + θ )
cos θ
1) T2 = Mg
2) T1 = Mg
3) T3 = Mg
senϕ
senϕ
A roldana apenas serve para levar o fio 1 do ponto O para a massa m . Por isso temos:
cos θ
cos θ
4) mg = T1 = Mg
⇒m=M
.
senϕ
senϕ
Na roldana temos do lado esquerdo T1 e do lado direito T1 sen (ϕ + θ ) , ambas para baixo.
Mg
A força normal tem de equilibrar esta soma.
cos θ
5) N = T1 + T1 sen (ϕ + θ ) = (1 + sen (ϕ + θ ) ) Mg
.
senϕ
Na parede a força normal é a componente vertical de T3 .
6) N parede = T3 senθ = Mg
senθ .cos (ϕ + θ )
senϕ
13