INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E
TECNOLOGIA DE SANTA CATARINA
CAMPUS JOINVILLE
CURSO SUPERIOR DE TECNOLOGIA EM
MECATRÔNICA INDUSTRIAL
AMARO DA SILVA
JACKSON KARNOPP
JOAO DE OLIVEIRA JUNIOR
PROJETO E IMPLEMENTAÇÃO DE UM SISTEMA
AUTOMÁTICO DE CONTROLE DE INCLINACAO
AMARO DA SILVA
JACKSON KARNOPP
JOAO DE OLIVEIRA JUNIOR
PROJETO E IMPLEMENTAÇÃO DE UM SISTEMA
AUTOMÁTICO DE CONTROLE DE INCLINACAO
JOINVILLE, 2014
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E
TECNOLOGIA DE SANTA CATARINA
CAMPUS JOINVILLE
CURSO SUPERIOR DE TECNOLOGIA EM
MECATRÔNICA INDUSTRIAL
AMARO DA SILVA
JACKSON KARNOPP
JOAO DE OLIVEIRA JUNIOR
PROJETO E IMPLEMENTAÇÃO DE UM SISTEMA
AUTOMÁTICO DE CONTROLE DE INCLINACAO
Submetido ao Instituto Federal
de
Educação,
Ciência
e
Tecnologia de Santa Catarina
como parte dos requisitos
aprovação na disciplina de
Metrologia e instrumentacao.
Orientador: Rodrigo coral, M.Sc.
JOINVILLE, 2014
Da Silva, Amaro.
Controle de inclinacao.da Silva, Amaro. karnopp, Jackson;
Junior de Oliveira, Joao – Joinville Instituto Federal de Santa
Catarina, 201. 54 f.
Trabalho de aprovacao da disciplina de Metrologia e
Instrumentacao, 2014. Graduação: Curso Superior de
Tecnologia em Mecatrônica Industrial. Modalidade: Presencial.
Orientador: Rodrigo Coral, M.Sc.
1. Controle de inclinacao, 2. Acelerometro, 3. Arduino, 4. LAb
view
I. PROJETO E IMPLEMENTAÇÃO DE UM SISTEMA
AUTOMÁTICO DE CONTROLE DE INCLINACAO
RESUMO
Este trabalho apresenta o projeto e a implementação de um
sistema automático de controle de inclinação.
O projeto consiste em uma base de madeira que serve de
sustentação para um pêndulo, este é formado por um eixo móvel
na parte central que possibilita movimentos no eixo “Y” através
da força gravitacional, nas extremidades do pêndulo foram
instalados dois recipientes com água, este fluido será deslocado
de uma extremidade a outra através de bombas centrífugas, em
uma condição de desequilíbrio um acelerômetro instalado na
superfície superior do pêndulo detectará o deslocamento do
mesmo e enviará um sinal elétrico para o arduino que recebe
esta informação de forma bruta e converte em um ângulo que
varia de -90 a + 90, esta informação será processada pela placa
DAQ 6009 comunicando o sinal gerado pelo Arduino com o
software Labview, e através de um módulo PID do software
buscara-se a condição de equilíbrio do pêndulo através do
controle de vazão das bombas.
Palavras-Chave: Arduino,
centrifuga, pêndulo.
Labview,
acelerômetro,
bomba
ABSTRACT
This work presents the design and implementation of an
automatic tilt control. The design consists of a wooden base
serving as support for a pendulum, it is formed by a movable
shaft which allows the central part moves in the axis "Y" by
means of the gravitational force of the pendulum at the ends of
the containers with water, this fluid will be moved from one end to
another through centrifugal pumps, in an unbalanced condition an
accelerometer installed on the upper surface of the pendulum
detect the displacement of it and send an electrical signal to the
arduino receiving this raw to information and converts it to an
angle ranging from -90 to + 90, this information will be processed
by the DAQ board 6009 communicating the signal generated by
Arduino with Labview software, and through a software PID
module sought to balance condition
Pendulum through the flow control of pumps
Keywords: Arduino, Labview, accelerometer, centrifugal pump,
pendulum.
LISTA DE FIGURAS
FIGURA 1 – ESTRUTURA BOMBA CENTRIFUGA ............................................... 233
FIGURA 2 – JUNÇOES TRANSISTORES .............ERROR! BOOKMARK NOT DEFINED.4
FIGURA 3 – POLARIZAÇÃO INVERSA ............... ERROR! BOOKMARK NOT DEFINED.5
FIGURA 4 – POLARIZAÇÃO DIRETA ................................................................. 25
FIGURA 5 – TRANSISTOR EMISSOR COMUM ..................................................... 26
FIGURA 6 – TRANSISTOR COLETOR COMUM .................................................... 27
FIGURA 7 – TRANSISTOR BASE COMMUM ........................................................ 28
FIGURA 8 – SIMBOLO DIODO.......................................................................... 28
FIGURA 9 – POLARIZAÇÃO DIRETA E POLARIZAÇÃO INVERSA ............................. 29
FIGURA 10 – PONTES DE DIODO .................... ERROR! BOOKMARK NOT DEFINED.0
FIGURA 11 – FILTRAGEM SIMPLES ................................................................. 31
FIGURA 12 – UTILIZAÇÃO FILTRO CAPACITIVO ................................................. 31
FIGURA 13 – FILTRAGEM E RIPPLE ................................................................. 32
FIGURA 14 – ACELEROMETRO ELETRICO ........ERROR! BOOKMARK NOT DEFINED.3
FIGURA 15 – ACELEROMETRO PIEZOELETRICO ............................................... 35
FIGURA 16 – ACELEROMERO PIEZORESISTIVO................................................. 35
FIGURA 17 – ACELEROMETRO CAPACITIVO......................................................36
FIGURA 18 – ACELEROMETRO DE EFEITO HALL ................................................ 36
FIGURA 19 – APLICAÇÃO ACELEROMETRO EM SMARTPHONES ........................... 37
FIGURA 20 --ARDUINO CONECTADO A UM PROTOBOARD ................................... 39
FIGURA 21 – ARDUINO COM INTERFACE PARA O LABVIEW .ERROR! BOOKMARK NOT
DEFINED.2
FIGURA 22 – PROJETO ESTRUTURA MECANICA ...............ERROR! BOOKMARK NOT
DEFINED.3
FIGURA 23 – PROJETO PLACA ELETRONICA ...ERROR! BOOKMARK NOT DEFINED.4
FIGURA 24 – ACELEROMETRO MPU-6050 .....ERROR! BOOKMARK NOT DEFINED.5
FIGURA 25 – ESQUEMA DE LIGAÇÃO ARDUINO UNO COM O ACELEROMETRO
........................................................... ERROR! BOOKMARK NOT DEFINED.6
FIGURA 26 – PINAGEM ENTRADA SAIDA PLACA DAQ6009 ERROR! BOOKMARK NOT
DEFINED.7
FIGURA 27 – PROGRAMA NO LABVIEW ...........ERROR! BOOKMARK NOT DEFINED.7
SUMÁRIO
1.
INTRODUÇÃO .................................................................... 22
2.
REVISÃO BIBLIOGRÁFICA ............................................ 233
2.1
2.2
2.3
BOMBA CENTRIFUGA ...... ERROR! BOOKMARK NOT DEFINED.3
TRANSISTOR .................. ERROR! BOOKMARK NOT DEFINED.4
TRANSISTOR EMISSOR COMUM ........ ERROR! BOOKMARK NOT
DEFINED.6
2.4
TRANSISTOR COLETOR COMUM ......................................... 26
2.5
TRANSISTOR EMISSOR COMUM .......................................... 27
2.6
DIODOS ........................................................................ 28
2.7
PONTES DE DIODO ..... ERROR! BOOKMARK NOT DEFINED.0
2.8
FILTRO CAPACITIVO ... ERROR! BOOKMARK NOT DEFINED.0
2.9
ACELEROMETRO .... ERROR! BOOKMARK NOT DEFINED.2
2.10
ELETRONICA ASSOCIADA ............. ERROR! BOOKMARK NOT
DEFINED.3
2.11
TIPOS DE ACELEROMETRO ...... ERROR! BOOKMARK NOT
DEFINED.4
2.11.1
PIZOELÉTRICO ....... ERROR! BOOKMARK NOT DEFINED.4
2.11.2
PIZORESISTIVO ......................................................... 35
2.11.3
CAPACITIVO ............................................................. .35
2.11.4
ACELEROMETRO DE EFEITO HALL .............................. 36
2.11.5
MAGNETO RESISTIVO ................................................ 36
2.12 APLICAÇÃO DE ACELEROMETROS ...................................... 37
2.13 PROTOCOLO DE MEMORIA ................................................. 38
2.13.1
ESTRUTURA DE INTERCONEXAO .................................... 38
2.14
ARDUINO ...................................................................... 38
2.14.1
HARDWARE .................................................................. 39
2.14.2
Software ...................................................................... 40
2.14.3
APLICAÇÕES............................................................. 40
2.14.4
LABVIEW .................................................................. 41
3.
3.1
3.2
3.3
3.3.1
3.3.2
3.3.3
3.3.4
3.3.5
DESENVOLVIMENTO ........................................................ 42
CONCEITO DO PROJETO .................................................... 42
ESTRUTURA MECANICA ................................................. 42
ESTRUTURA ELÉTRICA .................................................. 43
PLACA ELETRONICA........................................................... 43
ACELEROMETRO ........................................................... 44
COMUNICAÇÃO DO ACELEROMETRO COM O ARDUINO ..... 45
COMUNICAÇÃO DO ARDUINO COM O LABVIEW ............ 46
CONTROLE DO SISTEMA ............................................ 47
CONSIDERAÇÕES FINAIS ........................................................ 48
REFERÊNCIAS ........................................................................... 49
22
1. INTRODUÇÃO
A automatização está ligada à realização de movimentos
automáticos, repetitivos e mecânicos, implicando em ação cega
sem correção, enquanto que um sistema de automação
comporta-se como um operador humano que pensa e executa a
ação mais apropriada a partir do uso das informações sensoriais.
A palavra automação se destacou com o surgimento da máquina
de comando numérico em 1949/50, criada para realizar
operações programadas sem a intervenção direta de um
operador. Essa tecnologia abriu amplas expectativas de
mudanças no processo produtivo.
A partir dessa evolução, todos os ramos da indústria
tiveram impacto significativo na automatização dos seus
processos, dentre elas a área de Metrologia e Instrumentação.
Num mercado cada vez mais feroz é impensável um processo
com controle rígido que evite prejuízos e que busque o controle
da fabricação, visando garantir a qualidade de produtos e
serviços.
A padronização de pesos e medidas é essencial neste
contexto de mercado, portanto a utilização de dispositivos que
garantam estes quesitos é primordial, pois evita erros e
desperdícios aumentando assim a produtividade.
Neste âmbito será apresentado o projeto de um sistema
de controle de inclinação que visa futuramente ser transformado
em uma balança através de deslocamento de fluido.
23
2. REVISÃO BIBLIOGRÁFICA
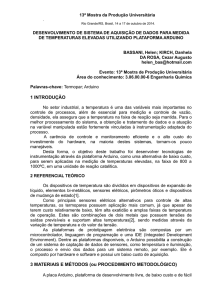
2.1 Bomba centrifiuga
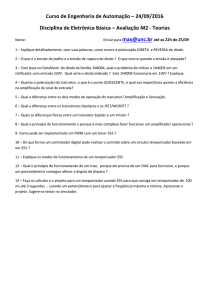
È o equipamento mais utilizado para bombear
líquidos,elevando, pressurizando ou transferindo liquido de um
local para o outro.
Seu trabalho transfere energia cinética para o fluido,
resultando em energia potencial, podendo ser de posição ou
mais usualmente de pressão no local de descarga da bomba.
Esta transformação e originada pelo acionamento
mecânico de um eixo rotativo, a rotação transfereenergia para o
fluidoatraves das palhetas do rotor.
O fluido presente na sucção entra no olho do rotor, uma
cavidade de diâmetro menor, interna que e o ponto de partida
para o escoamentoem direção ao diâmetro externo pelos canais
formados entre as palhetas do rotor.
A transferência de energia da bomba para o fluido e
diretamente proporcional ao diâmetro do rotor, da rotação de
acionamento e do projeto do rotor, Se a energia requerida for
mais alta que a fornecidapela bomba, não haverá escoamento,
apenas o fluido sera pressurizado
Para especificar uma bomba centrifuga corretamente devese observar as relações entre a bomba instalada, o sistema de
tubulações empregado e do manancial supridor do fluido
bombeado.
FIGURA 1 – Estrutura bomba centrifuga
24
2.2 Transistor
O transistor foi descoberto em novembro de 1947, por
cientistas do laboratório da Bell Telephone, a partir da
necessidade do aperfeiçoamento e redução do tamanho das
válvulas, além do aumentode sua eficiência, pois elas
consumiam muita energia.
O transistor e uma dos componentes mais importantes na
eletrônica, ele permite a amplificação e comutação de sinais,
tendo substituído as válvulas termoionicas na maior parte da
aplicações.
O material mais utilizado dos transistores e o silício,
entretanto, os primeiros modelos foram fabricado com
germânio, porem o silício apresenta temperaturas de trabalho
mais elevadas, além de menores correntes de fuga.
O transistor é formado por duas juncoes p-n em serie,
podendo apresentar as configurações p-n-p e n-p-n são os
mais comunspois a movimentação de elétrons e maior o que
facilita o processamento de sinais de alta frequência. Devido
aos três terminais existentes e possível usar a tensão entre
dois terminais para controlar o fluxo de corrente no terceiro
terminal, e obter uma fonte controlável.
Pode-se designar os três terminais por: Emissor (E), Base (B)
e coletor (C) sendo constituído por duas juncoes PN( juncao
base-emissor e juncao base-coletor).
Figura2- Junçoes transistor.
Os transistores tem três zonas de funcionamento distintas:
Corte- Ambas as juncoes estão polarizadas inversamente
25
Figura
FIGURA 3- Polarizaçao inversa
Saturaçao- Ambas as junções estão polarizadas diretamente
Figura 4- Polarizaçao direta
Activa- Junçao base-emissor polarizada diretamente e juncao
base coletor polarizada inversamente
Figura 5- Zona Activa
Os transitores funcionam como amplificador, quando a
corrente do coletor e um múltiplo da corrente da base. Se
aplicarmos na base do transistor um sinal teremos um valor
maior de tensão no emissor, que ao fazermos uma relação
inversamente proporcional entre a corrente do coletor e da
base resultara em um ganho proporcional (Beta ou Hfe).
A principal diferença entre os três tipos de transistores esta
justamente no ganho, conforme descrito abaixo:
Base comum: Ganho em tensão, sem ganho em corrente
Emissor comum: Ganho em tensão e corrente
26
Coletor comum: Ganho em corrente, sem ganho em tensão.
2.3 Transistor Emissor Comum
O terminal do emissor do transistor é ligado tipicamente a
referencia de 0V ou terra. O terminal do coletor é ligado a
carga de saída, e o terminal do coletor e ligado a carga de
saída, e o terminal da base atua como a entrada de sinal. O
circuito basicamente é constituído por uma resistência de
carga RC e um transistor NPN.
Os circuitos emissor comum são utilizados para amplificar
sinais de baixa voltagem, como os sinais de rádio fracos
captados por uma antena, para amplificação de um sinal de
áudio e vídeo.
Figura 5- Transistor Emissor comum
2.4 Transistor Coletor Comum
O circuito possui um ganho de corrente típico que depende
em grande parte do hfe do transistor . Uma pequena
mudança na corrente de entrada resulta em uma mudança
27
muito maior na corrente de saída enviada a carga. Deste
modo, um terminal de entrada com uma fraca alimentação
pode ser utilizado para alimentar uma resistência menor no
terminal de saída.
Figura 6- Transistor coletor comum
2.5 Transistor Base Comum
A ligação de um transistor em base comum é uma
configuração de um transistor na qual sua base é ligada ao
ponto comum do circuito.
Esta montagem é utilizada de forma menos frequente do que
as outras configurações em circuitos de baixa frequência, é
utilizada para amplificadores que necessitam de uma
impedância de entrada baixa. Como exemplo pode-se citar
os amplificadores VHF e UHF onde a baixa capacitância da
entrada é de importância critica
28
Figura 7- Transistor base comum
2.6 Diodos
É um componente elétrico que permite que a corrente
atravesse num sentido com muito mais facilidade do que no
outro. Diodos semicondutores são simbolizados em
diagramas esquemáticos como a figura abaixo:
Figura 8- Simbolo diodo
Quando colocado em um simples circuito bateria-lampada, o
diodo permite ou impede corrente através da lâmpada,
dependendo da polaridade da tensão aplicada, como nas
duas figuras abaixo
29
Figura 9- Polarizaçao direta e polarização inversa
Na imagem da esquerda o diodo esta diretamente polarizado,
há corrente e a almpada fica acesa. Na imagem da direita o
diodo está inversamente polarizado, não há corrente, logo a
lâmpada fica apagada.
O diodo funciona como uma chave de acionamento
automático (fechada quando o diodo esta diretamente
polarizado e aberta quando o diodo esta inversamente
polarizado). A diferença mais substancial é que, quando
diretamente polarizado, há uma queda de tensão no
diodomuito maior que do que aquela que geralmente se
observa em chaves mecânicas (no caso do diodo de silício,
0,7 V).
A principal função de um diodo semicondutor, em circuitos
retificadores de corrente, é transformar corrente alternada em
corrente continua pulsante. Como no semi ciclo negativo de
uma corrente alternada o diodo faz a função de uma chave
aberta, não passa corrente elétrica no circuito(considerando
o “sentido convencional de corrente”, do “positivo” para o
“negativo”). A principal função de um diodo semicondutor, em
circuitos de corrente continua, é controlar o fluxo de corrente,
permitindo que a corrente elétrica circule apenas em um
sentido, entretanto , podem ser projetados com outras
características como: retificadores tendo capacidade de
conduzir altas corrente elétricas em baixa frequência, diodos
de sinal capazes de retificar sinais de alta frequência, diodos
de chaveamento onde sua utilização é indicada circuitos
chaveados na condução de altas correntes.
30
2.7-Pontes de diodo
Quando 4 diodos são combinados, ocorre a retificação de
onda completa. Dispositivos que combinam 4 diodos em um
encapsulamento são chamados de pontes de diodo. Eles são
usados para a retificação de onda completa.
Pontes de diodos com grandes capacidades de corrente,
exigem um dissipador de calor. Normalmente, eles são
parafusados a um pedaço de metal, ou no chassis do
dispositivo em que são utilizados. O dissipador de calor
permite que o dispositivo irradie o calor em excesso.
Retificadores de ponte são classificados pela sua tensão
reversa máxima e máximo. Eles tem quatro ligaçãoes ou
terminais: as duas saídas CC são rotulados + e -, as duas
entradas CA são rotulados.
Figura 10- Pontes de diodo
2.8 Filtro capacitivo
Na saída de um sistema retificador obtemos corrente
continua pulsante, ou seja, formada pelos semi ciclos da
corrente alternada que são conduzidos pelos diodos . Esta
corrente contínua não é pura, não servindo para alimentar a
maioria dos circuitos eletrônicos.
A corrente continua pulsante da saída de um sistema
retificador precisa passar por um processo de filtragem que,
dependendo da aplicação, deve ser o mais eficiente quanto
31
seja possível. A figura abaixo mostra a forma mais simples
de filtragem.
Figura 11- Filtragem simples
Normalmente, para termos uma boa filtragem, usamos um
capacitor eletrolítico de grande valor que vai funcionar como
uma espécie de reservatório de energia, conforme segue.
Nos semiciclos em que o diodo conduz, o capacitor se
carrega com a tensão máxima retificada, ou seja, a tensão de
picodo secundário do transformador. Se ele for especificado
para fornecer uma tensão de 12 V, este valor corresponde a
um valor “rms”. O valor de pico é obtido multiplicando-se 12
por 1,41 (raiz quadrada de 2). Isso significa que o valor de
pico deste semiciclo é de 16,92 volts, É com esta tensão que
o capacitor se carrega em cada semi ciclo conduzido confomr
figuara abaixo:
Figura 12- Utilização de filtro capacitivo
Observa-se que não obtemos necessariamente um tensão
continua de 12 V, se usarmos numa fonte um transformador
como secundário de 12 V, mas, em príncipio um valor muito
32
maior. Esta tensão será de pico da rede, quando o capacitor
estiver completamente carregado.
Na prática, entretanto, a tensão não atinge o máximo, pois a
fonte precisa fornecer uma corrente a um circuito externo.
Assim, nos intervalos entre os semiciclos, quando a tensão
no diododiminui, e ele é mesmo polarizado no sentido
inverso, o capacitor se encarrega de fornecer tensão para o
circuito alimentado, não a deixando diminuir.
Desta forma, a tensão aplicada ao circuito alimentado e ,
consequentemente, a corrente, variam pouco. Esta variação
ou queda no circuito de carga será tanto menor quanto maior
for o capacitor utilizado, conforme figura abaixo, pois ele
pode fornecer energia por mais tempo a esse circuito
externo.
Figura 13- Filtragem e ripple
2.9- Acelerômetro
O acelerômetro é um dispositivo usado para medir a
aceleração própria. A aceleração própria difere da aceleração
(no sentido convencional de taxa de mudança de velocidade)
pois esta atrelada a sensação de peso medida em um dado
diferencial. Um acelerômetro é incapaz de medir aceleração
de um objeto em queda livre, por exemplo. A sensação de
peso em um acelerômetro em queda livre no sol ou na lua é
nula embora a aceleração seja bastante diferente nesses
casos.
Acelerômetros são dispositivos que podem funcionar a partir
de diversos efeitos físicos e tem, portanto, uma ampla faixa
de valores de aceleração que são capazes de medir, logo
tem uma gama de aplicações bastante elevada. Esses
dispositivos seção usados principalmente em sistemas de
posicionamento, sensores de inclinação, bem como sensores
33
de vibração. Uma aplicação bastante conhecida de
acelerômetros são as telas de aparelhos celulares que se
ajustam de acordo com o ângulo que fazem em relação a
aceleração da gravidade.
Partindo da segunda lei de Newton, é possível construirmos
vários tipos de acelerômetro. Podemos visualizar o seu
princípio de funcionamento se imaginar um copo de agua ate
a metade. Se colocarmos o copo sobre uma superfície plana
e empurramos para frente, desta forma o acelerando,
notamos que a água se move em relação ao copo, Outro
exemplo, rudimentar é um lustre pendurado em trem,
enquanto o trem acelera, freia ou faz uma curva é possível
notar uma ângulo entre a linha que segura o lustre e a
vertical.
Figura 14- Acelerômetro elétrico
2.10- Eletrônica associada
Os acelerômetros são dispositivos que tem alguma
propriedade variando em função da aceleração. Em geral,
um dispositivo que mede a aceleração tendo uma mudança
do sinal baseado em algum dos princípios físicos deve fazer
uma conversão do sinal alterado para o sinal que será
enviado ao resto do circuito.
Por exemplo: um circuito logico digital que tem um
acelerômetro capacitivo deve transformar a variação de
34
capacitância em um sinal de tensão para ser interpretado
pelo resto do circuito. Por isso, é usual a presença de algum
conversor de sinal.
O sinal convertido do acelerômetro muitas vezes não e
suficiente para ser passado ao resto do circuito e portanto
deve passar por um amplificador.
Outro elemento comum nesses dispositivos são os filtros de
frequência. Muitas vezes é necessário filtrar o sinal do
dispositivo para um determinada frequência de interesse, ou
a frequência em que se sabe a resposta do acelerômetro.
Além desses elementos, em dispositivos digitais é possível
alterar a faixa de frequência em que ele opera, trocando de
filtro. São comuns nesses dispositivos, memórias, geradores
de clock, e circuitos de roteamento de clock.
Muitos acelerômetros são usados para desligar aparelhos
quando estão em queda, por isso se colocam circuitos
lógicos que, quando identificam sinal zero em todos os eixos
do acelerômetro por um determinado período de tempo,
emitem um comando para desligar o aparelho, ou registrar os
dados em alguma memória antes do aparelho se destruir.
2.11- Tipos de acelerômetros
2.11.1- Pizoelétrico
Esse tipo de dispositivo faz uso do efeito piezo elétrico.
Normalmente, há uma massa presa a um cristal
piezoeletrico, quando há uma aceleração no sistema a
massa presa ao cristal acaba gerando uma deformação no
cristal e este deslocamento no cristal e este deslocamento
gera um sinal elétrico.
35
Figura 15- Acelerometro pizoelétrico
2.11.2- Piezoresistivo
Um acelerômetro piezoresistivo faz uso da variação de
resistência de um cristal quando esticado.
Figura 16- Acelerometro piezoresistivo
2.11.3- Capacitivo
Um acelerômetro capacitivo funciona de modo que a
aceleração no dispositivo desloca uma placa móvel de um
capacitor em relação a placas fixas no dispositivo. Desta,
forma altera-se a capacitância de cada capacitor.
36
Figura 17- Acelerometro capacitivo
2.11.4- Acelerômetro de efeito Hall
Neste dispositivo, a aceleração move uma fita, que está
conduzindo corrente elétrica, por uma campo magnético não
uniforme. Assim, quanto maior for o deslocamento, maior
será o campo magnético, portanto maior será a diferença de
potencial transversal a corrente, devido ao efeito Hall.
Figura 18- Acelerometro de efeito hall
2.11.5- Magnetoresistivo
O caso de um acelerômetro magnetoresistivo, a aceleração
causa um deslocamento em uma massa de material
magnético, e na parte fixa do dispositivo tem materiais que
alteram sua resistência com a presença de um campo
magnético.
37
2.12- Aplicações de acelerômetros
A indústria automobilística proporcionou um grande
barateamento de custos do instrumento devido ao seu uso
em larga escala. Nos carros, o acelerômetro exerce uma
importante função ao controle de estabilidade ao calcular
forças em que o veiculo esta sendo submetido, além de
auxiliar na orientação do GPS. Além de mais barato, o
instrumento ocupa dimensões muito menores, sendo
encontrado com frequência em celulares e computadores
portáteis.
Desde que o iPhone inovou com o recurso, celulares, players
e câmeras digitais abusam do posicionamento automático a
imagem, mudar de faixa ou executar ações sem que botão
algum seja pressionado. Em um computador, por exemplo,
uma das funções do acelerômetro é evitar que o disco rígido
seja danificado durante uma queda, parando o HD durante
movimentos bruscos.
Na indústria petrolífera é utilizado principalmente nos dutos
de extração pois é necessário monitorar a distancia das
cargas em que os dutos são submetidos, devido
principalmente a exposição de vibrações devido a ondas ou
mares.
Na robótica, acelerômetro muitas vezes são usados para
identificação da inclinação de determinada peça, ou medir a
movimentação da peça.
Figura 19- Aplicação acelerômetros em smartphones
38
2.13- Protocolo de Memória
2.13.1- Estruturas de interconexão
São caminhos que conectam vários módulos de um
computador(processador, memoria).
Um barramento é um conjunto de fios que transportam
informações com um proposito comum.
A CPU pode acessar três barramentos: o endereço, o de
dados e o de controle. Como foi visto, cada instrução possui
duas fases distintas: o ciclo de busca, quando a CPU coloca
o conteúdo do PC no barramento de endereço e o conteúdo
do PC no barramento de endereço e o conteúdo da posição
da memoria é colocado no registro de instrução da CPU, e o
ciclo de execução, quando a CPU executa o conteúdo
colocado no registro de instrução e coloca-o na memória de
dados do barramento de dados. Isto significa que quando a
operação do microcontrolador é iniciada ou resetada, o PC é
carregado com o endereço 0000h da memória do programa.
2.14-ARDUINO
Arduino é uma plataforma de prototipagem eletrônica de
hardware livre e de placa única, projetada com um
microcomtrolador Atmel AVR com suporte de entrada e
saída embutido, uma linguagem de programação padrão, a
qual tem origem em Wiring, e é essencialmente C e C++. O
objetivo do projeto é criar ferramentas que são acessíveis,
com baixo custo, flexíveis e fáceis de usar por artistas e
amadores. Principalmente para aqueles que não teriam
alcance aos controladores mais sofisticados e de ferramentas
mais complicadas.
Pode ser usado para o desenvolvimento de objetos
interativos independentes ou ainda para ser conectado a um
computador hospedeiro. Uma típica placa de arduino é
composta por um controlador, alguma linhas de entradas e
saídas digitais e analógicas, além de uma interface serial ou
usb, para interligar-se ao hospedeiro, que é usado para
programa-la e interagi-la em tempo real. Ela em si não possui
qualquer recurso de rede, porem é comum combinar um ou
39
mais Arduinos deste modo, usando extensões apropriada
denominadas Shields. A interface do hospedeiro é simples,
podendo ser escritas em varias linguagens.
2.14.1- Hardware
Sua placa consiste em um microcontrolador Atmel AVR de 8
bits, com componentes complementares para facilitar a
programação e incorporação para outros circuitos. Um
importante aspecto é a maneira padrão que os
conectoressao expostos, permitindo o CPU ser interligado a
outros módulos expansivos, conhecidos com Shields.
A grande maioria das placas inclui um regulador linear de 5
volts e um oscilador de cristal de 16 Mhz( podendo haver
variantes com um ressonador cerâmico), embora alguns
esquemas como o Lilypad usam ate 8 MHz e dispensam um
regulador de tensão embutido, por ter uma forma especifica
de restrições de fator. Alem de ser microcontrolador, o
componente também e pré-programado com um bootloader
que simplica o carregamento de programas para o chip de
memória flash embutido com outros aparelhos que
usualmente necessitam de um chip programador externo.
Figura 20-Arduino conectado a um protoboard
40
2.14.2- Software
O Arduino IDE é uma aplicação multiplataforma escrita em
Java derivada dos projetos Processing e Wiring. É
esquematizado para introduzir a programação a artistas e a
pessoas não familiarizadas com o desenvolvimento de
software. Inclui um editor de código com recursosde realce
de sintaxe, parênteses correspondentes e identação
automática, sendo capa de compilar e carregar programas
para a plca com um único clique. Com isso não há a
necessidade de editar Makefiles ou rodar programa em
ambientes de linha de comando.
Tendo uma biblioteca chamada Wring, ele possui a
capacidade de programar em C e C++. Isto permite criar com
facilidade mitas operações de entrada e saída, tem que
definir apenas duas unções no pedido para fazer um
programa funcional:
Setup- Inserida no inicio, na qual pode ser usada para
inicializar configuração e
Loop- chamada para repetir um bloco de comandos ou
esperar ate que seja desligada.
WProgram.h é um recurso para referenciar a biblioteca
Wiring, e a função main() apenas faz três chamadas distintas:
init(), definida em sua própria biblioteca, setup () e loop (),
sendo as duas ultimas configuradas pelo usuário.
O Arduino IDE usa o conjunto de ferramentas GNU e o AVR
libc para compilar os programas, para depois, com o
avrdude, enviar os programas para a placa.
2.14.3-Aplicaçoes
A principal finalidade do Arduino num sistema é facilitar a
prototipagem, implementação ou emulação do controle de
sistemas interativos, a nível domestico, comercial ou móvel,
da mesma forma que o CLP controla sistemas de
funcionamento industriais. Com ele é possível enviar ou
receber informações de basicamente qualquer sistema
41
eletrônico, com identificar a aproximação de uma pessoa e
variar a intensidade da luz do ambiente conforme a sua
chegada. Ou abrir as janelas de um escritório de acordo com
a intensidade da luz do sol e a temperatura ambiente.
Os campos de atuação para o controle de sistemas são
imensos, podemos ter aplicações de impressão 3D, robótica<
engenharia de transportes, engenharia agronômica e
musical.
2.15- Labview
O labview é um software aplicativo baseado na linguagem (
linguagem de programação gráfica) que emprega ícones ao
invés de textos para criar aplicações. Diferente das
linguagens de programação baseadas em textos (linhas de
comando), onde as instruções determinam a execução do
programa.
A programação baseada no fluxo de dados, onde os dados
determinam a execução, trazendo algumas vantagens para
aplicações de aquisição e manipulação de dados.
Os aplicativos são desenvolvidos pelo usuário com o uso de
um conjunto de ferramentas e objetos que possuem funções
para aquisição, analise e apresentação dos dados, GPIB e
controle de instrumentos seriais. Os códigos são acionados
no diagrama de blocos usando representações gráficas de
funções para controlar os objetos adicionados no painel
frontal. Depois de criado o diagrama de blocos é compilado
para a linguagem da máquina.
42
Figura 21-Arduino com interface para o Labview
3. DESENVOLVIMENTO
3.1 Conceito do Projeto
O projeto tem por objetivo equilibrar um pendulo através do
deslocamento de fluido de uma extremidade a outra. A ideia
inicial é poder equilibrar o pêndulo através de um acelerômetro, o
mesmo faz a leitura e envia um valor de tensão ao Arduino que
converterá este valor para um ângulo e enviará outro valor de
tensão para a placa do labview e através de um programa
enviara sinal para as bombas ligarem e desligarem variando a
potencia das mesmas.
3.2 Estrutura Mecânica
Através do software Solid Works projetou-se o pêndulo, o mesmo
será confeccionado com uma base de madeira de 500 X 300
mm, onde serão fixados dois batentes inclinados em 30 graus um
em cada extremidade, a fim de parar uma das extremidades que
está em desequilíbrio, constará na região central da base das
43
duas travessas que serão parafusadas 90 graus com a base e
terão uma altura de 250 mm a fim de propiciar a instalação do
eixo principal, o eixo principal será feito com uma dobradiça de
porta que possibilitará os movimentos no eixo Y.
Em cada extremidade foi fixado um recipiente fechado de acrílico
com água, os mesmos terão acoplados em cada um uma bomba
centrifuga modelo RDPC 3625D12 tendo dois orifícios de entrada
e saída de fluidos interligados por mangueiras de silicone.
Figura 22-Projeto estrutura mecânica
3.3 Estrutura Elétrica
3.3.1 Placa eletrônica
Com o objetivo de transformar a tensão de 220 V para 15V, e
alimentar as bombas com uma corrente continua, será
confeccionada uma placa eletrônica, conforme projeto abaixo.
Serão utilizados os seguintes componentes:
Para converter inicialmente a tensão da rede de 220 V para 30 V
será utilizado um transformador 220-30-2 A, em série estará
ligando uma ponte de diodos (1N4007) para uma retificação de
onda completa, neste momento obtemos uma corrente contínua
44
pulsante o que não é interessante para o sistema eletrônico, para
solucionar este problema será utilizado dois capacitores
eletrolíticos de (1000𝝁𝑭 -50V)
Para obter-se um ganho de corrente se faz necessário a
instalação de dois transistores Emissor-comum, para este projeto
será utilizado o TIP126 que possui um ganho de 1000, que
possibilita uma corrente de dreno das placas DAQ e Arduino bem
baixas, aproximadamente 5 𝝁𝑨 . Através da lei de Ohn chega-se
a um resistor de 16K para a base do transistor, levando em
consideração que a tensão nas bombas varia de 0 a 5V.
Figura 23-Projeto placa eletrônica
3.3.2 Acelerômetro
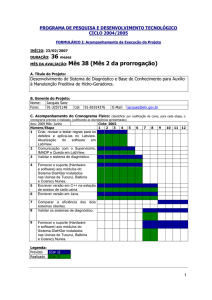
Será utilizado neste projeto o acelerômetro MPU 6050, este
possui em um único chip um acelerômetro e um giroscópio tipo
Mens. São três eixos para o acelerômetro e três eixos para o
giroscópio, sendo ao todo seis graus de liberdade.
Possui alta precisão devido ao conversor de 16 bits para cada
canal. Portanto o sensor captura os canais x,y,z ao mesmo
tempo.
45
O valor fornecido varia de -16384 a + 16384 (2^15), para cada
um dos eixos, para este trabalho será utilizado apenas o eixo Y.
Figura 24- Acelerômetro MPU-6050
3.3.3 Comunicação do acelerômetro com o Arduino
A comunicação com o Arduino usa a interface I2C, por meio dos
pinos SCL e SDA. Nos pinos XDA e XCL pode-se ligar outros
dispositivos I2C. A alimentação do módulo pode variar entre 3 a
5 V, mas seguindo as sugestões do fornecedor se usará uma
tensão de 5V para melhores resultados e precisão.
O Arduino recebe a informação bruta do acelerômetro (16384 a
+16384 (2^15)) e a converte em um angulo que varia de -90° a
+90°. Esta informação será exibida em um display de LCD 16X2
de forma orientativa, para isso será utilizado a biblioteca Wire
para ler os dados da interface I2C e a biblioteca LiquidCrystal
para enviar os dados para o display.
Para dar continuidade ao processo, o Arduino utiliza dois pinos
de saída digital (pinos 10 e 11), para gerar tensão de 0 a 5 volts
(sinal em forma de PWM, que então gera uma tensão media de
0-5V), de forma linear para representar o movimento máximo do
46
pêndulo (-90 a +90 graus) por exemplo, se o ângulo lido foi -45º
(inclinação para esquerda), o pino 10 gera 2,5V e o pino 11 gera
0V, se o ângulo lido é + 90 graus, o pino 10 muda para 0V e o
pino 11 para 5V, e assim o Arduino responde linearmente.
Figura 25- Esquema de ligação do Arduino Uno com o
acelerômetro MPU-6050
3.3.4 Comunicação do Arduino com o Labview
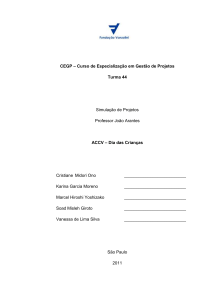
Para comunicação do Arduino com o Labview resultar em uma
leitura de tensão foi utilizada a DAQ6009, sendo que o valor da
tensão simboliza a inclinação do pêndulo, as saídas do Arduíno
foram conectadas as duas entradas analógicas para obter uma
leitura diferencial, portas AI0 e AI4 formando uma leitura, e AI1 e
AI5 para fazer outra leitura.
47
Figura 26- Pinagem de entradas e saídas placa DAQ 6009
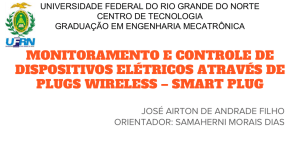
3.3.5 Controle do sistema
O objetivo principal era o controle das bombas de água para
dessa forma conseguir o equilíbrio do pêndulo, para isto utilizouse as duas saídas analógicas da placa NI DAQ6009, o controle
das bombas foi feito por um modulo PID do labview, que observa
os ângulos e ajustava um valor potência para as bombas, que
era convertido em tensão elétrica nas saídas AO0 e AO1, que
por sua vez, polarizavam os transistores da placa de potência do
projeto.
48
Figura 26- Painel frontal do labview, que monitora ângulo
e potencia das bombas
49
Figura 26- Programa do labview com módulos de controle
PID
50
CONSIDERAÇÕES FINAIS
No inicio do trabalho, optamos por elaborar um sistema de
controle linear, de forma que a potência das bombas
respondesse de forma linear ao ângulo de inclinação. Todo
controle era realizado pelo arduino, havia apenas algumas
leituras das variáveis que eram simplesmente monitoradas e
exibidas graficamente pelo labview, mas infelizmente não
obtivemos êxito no controle.
Numa segunda etapa, o arduino ainda continuou fazendo a
leitura e processamento do ângulo de inclinação, porém o
processamento e calculo de potência das bombas passou a ser
feito pelo labview, utilizando um modulo PID para melhorar a
estabilidade do pendulo. Obtivemos resultados bem mais
satisfatórios que na primeira etapa, mas pelo fato de estarmos
trabalhando com água, que é um fluido difícil de se controlar, a
estrutura que foi feita em madeira e se mostrava pouco estável
conforme o movimento do pendulo, também não conseguimos
controlar conforme nosso objetivo.
De forma geral, conseguimos observar as diferenças quando
trabalhamos com dispositivos embarcados e com o labview. O
Arduino apesar de ter bibliotecas prontas, que facilitam a
programação e a comunicação com diversos dispositivos, é
bastante limitado se comparado ao labview e os dispositivos de
aquisição de dados da national instruments, que oferecem
velocidade e precisão muito superiores.
51
REFERÊNCIAS
http://macao.communications.museum/por/exhibition/secondfloor/moreinfo/2
_10_2_HowDiodeWorks.html Acesso: 24.10.14
http://www.filtrocapacitivo.com.br/ Acesso: 24.10.14
http://arduino.cc/en/Main/arduinoBoardUno Acesso: 03.11.14
http://www.linguee.com.br/inglesportugues/traducao/national+instruments+labview.html Acesso: 04.11.14
http://www.electronica-pt.com/componentes-eletronicos/transistor-tipos
Acesso: 05.11.14
http://pt.wikipedia.org/wiki/Regulador_de_tens%C3%A3o Acesso: 10.11.14