MOVIMENTO ROTACIONAL E
MOMENTO DE INÉRCIA
1.0 Definições
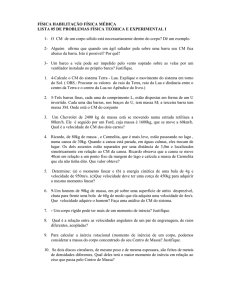
Posição angular: utiliza-se uma medida de ângulo a partir de uma direção de referência. É
conveniente representar a posição da partícula com suas coordenadas polares: (r, ).
Quando uma partícula sobre um corpo movimenta-se ao longo do círculo de raio r até o ponto
P, ela se desloca por um arco de comprimento s, que está relacionado com pela relação
Apesar de ser adimensional, é comum chamar esta unidade de radiano (rad).
*Observe se sua calculadora está programada em radianos antes de fazer os cálculos.
Velocidade angular média: razão do deslocamento angular para o intervalo de tempo Δt:
̅
A velocidade angular instantânea é definida como o limite da razão da equação acima quando
Δt tende a zero:
Unidade das velocidades angulares: rad/s ou s-1.
Por analogia, temos as acelerações angulares médias e instantâneas:
̅
Unidades das acelerações angulares: rad/s² ou s-2.
Modelo de corpo rígido: qualquer sistema de partículas no qual elas permanecem em posições
fixas entre si. Para rotação ao redor de um eixo fixo, toda partícula de um corpo rígido tem a
mesma velocidade angular e a mesma aceleração angular.
2.0 Cinemática Rotacional
Integrando a expressão da aceleração angular instantânea, temos:
∫
∫
Integrando a expressão da velocidade angular instantânea, temos:
∫
∫
∫
∫
Eliminando o tempo das equações, temos:
Eliminando a aceleração das equações, temos:
(
)
Diferente do movimento translacional, o corpo fica retornando à sua orientação original.
3.0 Relações entre grandezas rotacionais e translacionais
Velocidade:
Aceleração:
Aceleração centrípeta:
4.0 Momento de Inércia
A segunda lei de Newton estabelece que a velocidade do corpo varia tanto mais rapidamente
por efeito de uma força resultante não nula quanto menor for a sua massa. É nesse sentido
que dizemos que a massa é a medida da inércia do corpo. Mas, quando consideramos os
movimentos de rotação, a medida mais apropriada da inércia de um corpo é o seu momento
de inércia.
Vamos considerar que m1, m2, ... mk, ... mN são as massas das N partículas que compõem um
corpo extenso e que r1, r2, ... rk, ... rN são as respectivas distâncias a um eixo qualquer.
Definimos o momento de inércia I desse corpo, em relação ao eixo considerado, pela
expressão:
∑
Para um corpo contínuo, extenso, podemos calcular o momento de inércia dividindo o corpo
em muitos elementos pequenos com massa Δmi, tão pequenos que essas massas tendem a
zero:
∑
∫
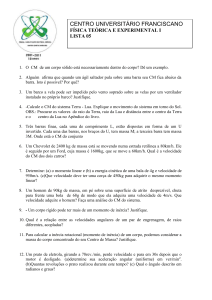
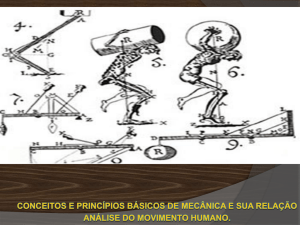
4.1 Teorema de Steiner
O teorema de Steiner ou teorema dos eixos paralelos diz o seguinte:
O momento de inércia de um corpo em relação a um eixo qualquer é igual ao momento de
inércia em relação ao eixo paralelo, que passa pelo centro de massa, somado ao produto da
massa do corpo pela distância entre os eixos ao quadrado.
Vamos ver então o cálculo do momento de inércia localizado em (x´,y´) tendo como referencial
o centróide que dista da origem A. A localização do elemento dm é, portanto,
̅
̅
Para o momento de inércia em relação a x, temos que, o elemento de momento de inércia é,
∫
̅
∫
∫
̅
̅
̅∫
̅ ∫
Sendo
o momento de primeira ordem (estático). Como o momento estático é nulo
∫
quando passa pelo centróide, temos que:
∫
̅ ∫
A primeira integral é o momento de inércia em relação ao centróide:
̅
Sendo ̅ a distância do eixo até o centro de massa.
Analogicamente:
̅
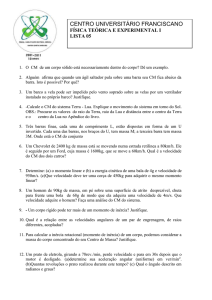
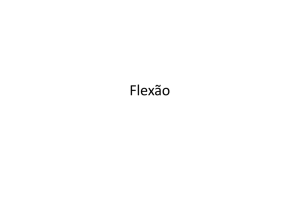
4.2 Teorema dos Eixos Perpendiculares
Dada uma placa plana de formato e distribuição de massa arbitrários, a soma de seus
momentos de inércia em relação a quaisquer 2 eixos perpendiculares contidos no plano da
placa é igual ao momento de inércia relativamente a um eixo que passa do seu ponto de
interseção e é perpendicular à placa.
Considere uma lâmina fina e uniforme. Sendo
e
os momentos de
∫
∫
inércia em relação ao eixo OX e OY respectivamente, o momento de inércia em relação ao eixo
OZ é dado por:
∫
Sendo r² = x² + y², temos:
∫
∫
∫