Adição de momento angular
Mecânica Quântica 1
Pós-graduação em Física
Conceitos fundamentais
Sejam 𝐽1 e 𝐽2 dois momentos angulares associados a sistemas
diferentes. Eles são geradores de rotações da forma 𝐷𝑖 𝑛, 𝜙 com
𝑖 = 1,2. Desejamos tratar um sistema composto tal que 𝐽 = 𝐽1 + 𝐽2
seja o gerador de rotações 𝐷 𝑅 = 𝐷1 𝑅1 ⨂𝐷2 𝑅2 .
• As componente de 𝐽 seguem as mesmas relações de comutação
do momento angular.
• O problema de autovalores para 𝐽2 e 𝐽𝑍 é igual ao de um
momento angular individual:
– 𝐽2 𝑗1 𝑗2 ; 𝑗𝑚 = ℏ2 𝑗 𝑗 + 1 𝑗1 𝑗2 ; 𝑗𝑚 ;
– 𝐽𝑍 𝑗1 𝑗2 ; 𝑗𝑚 = ℏ𝑚 𝑗1 𝑗2 ; 𝑗𝑚
• Dois conjuntos de observáveis, cada uma com uma base comúm:
– 𝐽12 , 𝐽22 , 𝐽𝑍1 , 𝐽𝑍2 ; base A: 𝑗1 𝑗2 ; 𝑚1 𝑚2 = 𝑚1 𝑚2
– 𝐽2 , 𝐽𝑍 , 𝐽12 , 𝐽22 ; base B: 𝑗1 𝑗2 ; 𝑗𝑚 = 𝑗𝑚
Valores de 𝑗 e 𝑚: subespaços
• 𝑗 pode tomar diferentes valores definidos pela condição
𝑗1 − 𝑗2 ≤ 𝑗 ≤ 𝑗1 + 𝑗2
• Os valores de 𝑚 continuam obedecendo −j ≤ 𝑚 ≤ 𝑗 para cada 𝑗.
• Dimensão da base: N = 2𝑗1 + 1 2𝑗2 + 1 .
Exemplo: 𝑗1 = 1; 𝑗2 = 1 com N = 9
0 ≤ 𝑗 ≤ 2 → 𝑗 = 0,1,2
Assim, há três subespaços com os seguintes elementos:
1. 𝑗 = 0, 𝑚 = 0; com 𝑗, 𝑚 = 0,0 .
2. 𝑗 = 1, 𝑚 = 1,0, −1; com 𝑗, 𝑚 = 1,1 , 1,0 , 1, −1 .
3. 𝑗 = 2, 𝑚 = 2,1,0, −1, −2; com 𝑗, 𝑚 = 2,2 , 2,1 , 2,0 , 2, −1 , 2, −2 .
• Os diferentes valores de 𝑗 definem uma estrutura nova de
subespaços dentro do contexto do momento angular total;
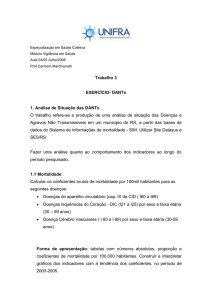
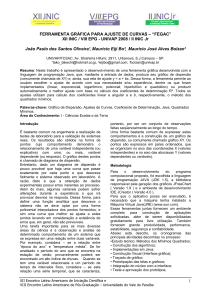
Operador de rotação
• O operador de rotação, escrito em uma forma matricial arranjando
o ordenamento da base seguindo a estrutura dos subespaços de 𝑗,
é bloco-diagonal.
𝐷 𝑅 = 𝐷1 𝑅1 ⨂𝐷2 𝑅2 = 𝐷 𝑗1 −𝑗2 ⨂𝐷 𝑗1−𝑗2 +1 ⨂… ⨂𝐷𝑗1 +𝑗2 −1 ⨂𝐷𝑗1 +𝑗2
𝑗1 = 1; 𝑗2 = 1
0,0
0,0
1,1
1,0
1, −1
2,2
2,1
2,0
2, −1
2, −2
1,1
1,0
𝐷𝑗=0
0
0
𝐷𝑗=1
1, −1
2,2
2,1
2,0
2, −1
2, −2
0
0
=𝐷 𝑅
0
0
𝐷𝑗=2
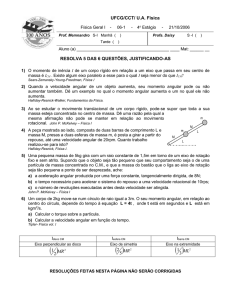
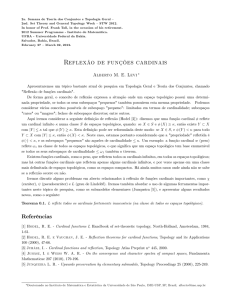
Degenerescência do espectro de 𝐽𝑍
• Esquecendo do 𝑗, notamos que tem estados da base com
valores de 𝑚 iguais.
• O grau de degenerescência, 𝑔𝑗1 𝑗2 𝑚 , pode ser quantificado
facilmente usando um método gráfico ilustrado a seguir (para
o exemplo 𝑗1 = 1; 𝑗2 = 1):
• Nos eixos, desenhamos pontos indicando os pares (𝑚1 , 𝑚2 ).
• Ligamos com linhas os casos com o mesmo 𝑚1 + 𝑚2 = 𝑚.
𝑚2
𝑚=2
1,1
𝑚=-1
−1
−1,
−1
𝑚=-2
0
𝑚=-1
1 𝑚=1
𝑚=0
𝑔11 −2 = 1
𝑚1
𝑔11 −1 = 2
𝑔11 0 = 3
𝑔11 1 = 2
→ 𝑚 = 𝑗1 − 𝑗2 = 0
𝑔11 2 = 1
o São autoestados em ambas as bases.
o Pertencem a diferentes subespaços de 𝑗.
Coeficientes de Clebsch-Gordan
• Ambas as bases são ortonormais = relação de completeza;
• Matriz de transformação:
𝑗𝑚 ==
𝑚1𝑚
𝑚12𝑚2𝑚𝑗𝑚
1 𝑚2
1 𝑚2𝑚𝑗𝑚
𝑚1𝑚
𝑚12𝑚2
o
o
o
o
Coeficientes de Clebsch-Gordan: Elementos da matriz de transformação;
Definidos positivos e reais (convenção sobre fase);
Nulos a menos que 𝑚1 + 𝑚2 = 𝑚;
Para os casos particulares de 𝑚max = 𝑗1 + 𝑗2 e 𝑚min = −𝑗1 − 𝑗2 , os coeficientes
são 1:
𝑗1 𝑗2 𝑗𝑗 = −𝑗1 − 𝑗2 𝑗 − 𝑗 = 1
o Dentro de um subespaço de 𝑗, e definindo os operadores 𝐽± = 𝐽1± + 𝐽2± , chega-se
a uma relação de recorrência que ajuda na obtenção dos coeficientes:
𝑗 ∓ 𝑚 𝑗 ± 𝑚 + 1 𝑚1 𝑚2 𝑗, 𝑚 ± 1
= 𝑗1 ∓ 𝑚1 + 1 𝑗1 ± 𝑚1 𝑚1 ∓ 1, 𝑚2 𝑗, 𝑚 +
𝑗2 ∓ 𝑚2 + 1 𝑗2 ± 𝑚2 𝑚1 , 𝑚2 ∓1 𝑗, 𝑚
Relações uteis
i.
Relação de recorrência:
𝑗 ∓ 𝑚 𝑗 ± 𝑚 + 1 𝑚1 𝑚2 𝑗, 𝑚 ± 1
= 𝑗1 ∓ 𝑚1 + 1 𝑗1 ± 𝑚1 𝑚1 ∓ 1, 𝑚2 𝑗, 𝑚
+ 𝑗2 ∓ 𝑚2 + 1 𝑗2 ± 𝑚2 𝑚1 , 𝑚2 ∓1 𝑗, 𝑚
ii.
𝑗1 𝑗2 𝑗𝑗 = −𝑗1 − 𝑗2 𝑗 − 𝑗 = 1;
iii. Se 𝑚1 = ±𝑗1 , 𝑚2 = ±𝑗2 e 𝑚 = ±𝑗 então
𝑚1 𝑚2 𝑗𝑗
= −𝑚1 − 𝑚2 𝑗 − 𝑗
= −1
iv.
𝑗1 −𝑚1
2𝑗 + 1 ! 𝑗1 + 𝑗2 − 𝑗 ! 𝑗1 + 𝑚1 ! 𝑗2 + 𝑚2 !
𝑗1 + 𝑗2 + 𝑗 + 1 ! 𝑗 + 𝑗1 − 𝑗2 ! 𝑗 − 𝑗1 + 𝑗2 ! 𝑗1 − 𝑚1 ! 𝑗2 − 𝑚2 !
Se 𝑗 = 𝑗1 + 𝑗2 então
𝑚1 𝑚2 𝑗𝑚 =
2𝑗1 ! 2𝑗2 ! 𝑗 + 𝑚 ! 𝑗 − 𝑚 !
𝑗1 + 𝑚1 ! 𝑗1 − 𝑚1 ! 𝑗2 + 𝑚2 ! 𝑗2 − 𝑚2 !