1
Geração com Máquinas de Indução: uma
contribuição ao estudo de Geradores de Indução
M. O. Oliveira, IEEE Member, D. A. C. Lima, UFRGS University, L. A. Walantus, UFRGS University,
O. E. Perrone, UNaM University, A. S. Bretas, IEEE Senior Member, R. W. Orellana Paucar, Osinergmin
Abstract— Over the last years the cost increase, limited
reserves, and adverse environmental impact of fossil fuels,
and the governmental incentives have made that the wind
energy to be one of the fastest growing renewable energy
sources. In this context, this paper presents a brief
explanation theoretical about modeling and operation
characteristics of the main Induction Generators (IG) used
in wind generators. It is presenting a theoretical study of
Squirrel-Cage IG, Self-Excited IG and Doubly Fed IG.
Keywords—Induction
mechanical model.
generator,
electric
modeling,
I. INTRODUÇÃO
crescimento gradual no consumo de energia elétrica, os
Oaltos
custos associados ao aumento da capacidade das
linhas de transmissão e a dificuldade de obtenção de
licenças ambientais para grandes empreendimentos têm
motivado governos e empresas privadas à busca de novas
fontes de geração de energia elétrica como alternativa às
grandes unidades de geração tradicionais [1]. Nesse
contexto, visualiza-se o crescente interesse na utilização de
fontes renováveis oriundas do vento, da água e do sol,
tornando-se hoje um setor de grandes investimentos e
pesquisas.
Por outro lado, o baixo custo de aquisição e a
simplicidade de utilização como gerador, levaram às
maquinas de indução a um alto nível de popularidade
quando utilizado como Gerador de Indução (GI). Esta
preferência deve-se principalmente às vantagens dos GI
em relação aos Geradores Síncronos (GS), entre as quais
temos: reduzido custo unitário, ausência de uma fonte
externa de excitação em corrente direta, maior robustez e
facilidade de manutenção [2]. No entanto, o elevado
consumo de energia reativa e a fraca regulação de tensão e
frequência em condições de velocidade variável tornam-se
os principais problemas deste tipo de máquinas [3].
Este trabalho visa contemplar de maneira simplificada
e sucinta o estudo relacionado às características de
operação e modelagem dos GI quanto ao tipo de excitação.
Desta forma, será apresentado um estudo teórico da
máquina de indução quando utilizado como GI com rotor
Gaiola de Esquilo (GIGE), GI com Auto Excitação (GIAE) e o
GI Duplamente Excitado (GIDE).
II. MÁQUINA DE INDUÇÃO
As características de reversibilidade na conversão de
energia, que apresentam as máquinas de indução, a
tornam uma das máquinas elétricas mais utilizadas hoje
em dia na indústria. Por apresentar um bom desempenho e
um baixo custo de aquisição, a máquina de indução é mais
utilizada como motor, sendo conhecida como motor
assíncrono.
Primeiramente podemos classificar os GI em função das
características construtivas do rotor dividindo-se assim
em: gerador de indução rotor bobinado e gerador de
indução rotor gaiola de esquilo. Logo, considerando as
características rotativas da máquina primaria o GI pode
ser de velocidade constante e/ou de velocidade variável.
Por fim, se considerarmos a locação do GI temos
basicamente duas configurações, para operação interligada
e/ou para operação isolada. Além disso, em [3] se faz uma
classificação dos GI em função das características de
velocidade e frequência desta máquina, a qual é
apresentada a seguir.
A. Velocidade-Constante e Frequência-Constante
Neste esquema, a velocidade da máquina primaria é
mantida constante. Um GI nesta configuração pode operar
sobre um barramento infinito com um deslizamento de 1%
a 5% acima da velocidade de sincronismo. Estes geradores
apresentam maior simplicidade que os geradores
síncronos e são mais econômicos. Além disso, são mais
fáceis de operar e controlar, requerendo menor
manutenção [3].
B. Velocidade-Variável e Frequência-Constante
M. O. Oliveira, O. E. Perrone e L. A. Walantus trabalham no CEED UNaM, Argentina ([email protected], [email protected],
[email protected])
A. S. Bretas e D. A. C. Lima são com a Universidade Federal do Rio
Grande do Sul (UFRGS), Porto Alegre, Brasil (e-mails: [email protected],
[email protected]).
R. W. Orellana Paucar é com o Organismo Supervisor de la Inversión en
Energía
y
Minería
(Osinergmin),
Lima,
Perú
(e-mail:
[email protected]).
A operação em velocidade-variável dos sistemas de
geração eólicos apresentam altos rendimentos para baixas
e altas velocidades do vento. Isso resulta em um maior
rendimento energético anual por capacidade instalada. Os
esquemas mais comumente utilizados para obter uma
frequência de saída constante são:
2
1) Conversores AC-DC-AC: após o advento de poderosos
tiristores, a saída de corrente alterna (AC) do gerador
de indução trifásico é convertida em corrente contínua
(DC) através de uma ponte retificadora e logo
convertida novamente em AC utilizando comutadores
lineares. Dado que a frequência é automaticamente
fixada pela linha de energia, eles também são
conhecidos como conversores síncronos [3].
2) Gerador de Indução de Dupla Saída (GIDS): o GIDS
constitui-se de uma máquina de indução trifásica de
rotor bobinado, mecanicamente acoplado a uma
turbina hidrelétrica ou eólica e cujo terminal do estator
é conectado a uma fonte de tensão e frequência
constante. A saída de frequência variável é introduzida
na rede AC através de um conversor AC-DC-AC
constituído de uma ponte retificadora de diodos de
onda completa em combinação com tiristores
inversores. Uma das vantagens pendentes dos GIDS em
sistemas de conversão de energia eólica é que
representa o único esquema no qual a energia gerada é
maior do que o índice da máquina. A manutenção
demandada pela máquina é alta, o fator de potência é
baixo, e a confiabilidade é pobre devido ao contato de
deslizamento mecânico no rotor. Este esquema não é
recomendável para sistemas de geração de energia
isolados pelo fato de necessitar uma fonte externa de
excitação [3].
• comporta-se como motor, fornecendo potência
mecânica ao eixo quando a velocidade do rotor for
menor e no mesmo sentido que a velocidade do campo
girante.
• comporta-se como gerador, fornecendo energia elétrica
nos terminais do estator, quando a velocidade do rotor
for maior a velocidade síncrona e quando são
conectadas a uma fonte externa de energia reativa.
• já quando o campo girante da armadura e do rotor
apresentam sentidos de rotação opostos, a máquina de
indução encontra-se funcionando como freio.
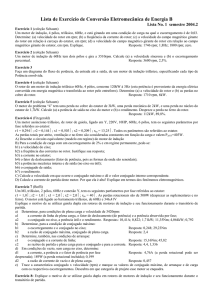
A Figura 1 apresenta uma visão espacial dos elementos
básicos que constituem uma máquina de indução: estator,
rotor e eixo. O estator (ou armadura) é envolvido por três
enrolamentos (bobinas), defasados espacialmente em 120
graus. Estes enrolamentos, quando alimentados por
tensões trifásicas, são percorridos por correntes trifásicas,
que dão origem a campos magnéticos alternados no
entreferro que somados, constituem um único campo
girante [9].
C. Velocidade-Variável e Frequência-Variável
O desempenho dos geradores síncronos é afetado
quando a velocidade da máquina primaria é variável. Para
frequências variáveis, derivadas da mudança de
velocidade, os GIAE podem ser convenientemente
utilizados para cargas resistivas, as quais são insensíveis à
frequência [3]. Quando comparada com geradores de DC,
o GI apresenta a vantagem de ser robusto, ter custos de
manutenção reduzidos e possuir alta densidade de
potência (W/kg), o que se reflete em máquinas de
tamanho reduzido [4]. Porém, apresenta uma regulação
de tensão e frequência insatisfatórias, mesmo quando
acionada sob velocidade constante no rotor e alimentando
cargas com potência totalmente ativa [5], [6].
III. FUNCIONAMENTO DA MÁQUINA DE INDUÇÃO
A indução magnética foi descoberta pelo físico Michel
Faraday em 1931 e descreve o surgimento de uma tensão
em um condutor que é atravessado por um campo
magnético [7]. Por outro lado, o engenheiro croata Nicola
Tesla, teve a ideia de criar um campo magnético girante
com três bobinas fixas, separadas de 120° alimentadas por
uma corrente alternada trifásica de tal forma que se no
meio destas bobinas for colocado um rotor metálico, este
se orientará de acordo com este campo girante [7]. No
entanto, a diferença de velocidade angular entre o campo
girante (velocidade síncrona) e o rotor, estabelece qual o
comportamento da máquina de indução segundo se
detalha a seguir [8]:
Figura 1. Elementos básicos de um motor de indução
trifásico.
A velocidade de sincronismo é dependente do número
de pólos da máquina e da frequência das tensões
aplicadas sobre o estator, e fica definida como sendo:
NS =
120 ⋅ f
P
(1)
donde Ns é a velocidade de sincronismo (rpm), f a
frequência (Hz) e P o número de pólos da máquina.
A diferença entre a velocidade de campo girante e a
velocidade do rotor é conhecida como escorregamento ou
deslizamento das rotações e define-se como:
s=
NS − N
NS
(2)
onde s é o escorregamento para uma determinada
velocidade N do rotor quando a velocidade do campo
girante é NS.
IV. GERADOR DE INDUÇÃO ROTOR GAIOLA DE ESQUILO
Construtivamente a máquina de indução e a máquina
síncrona têm o mesmo estator. O estator pode ser
fabricado de aço laminado ou ferro fundido e compõe-se
de um núcleo de chapas magnéticas, que são dotadas de
certo número de ranhuras para receber o enrolamento
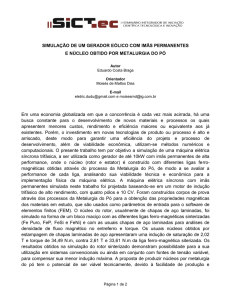
trifásico [4]. O gerador de indução com rotor gaiola de
3
esquilo é basicamente um motor assíncrono com as
bobinas do rotor em curto-circuito, como apresentado na
Figura 2. A gaiola é frequentemente fabricada pela injeção
de alumínio puro nas ranhuras, onde os anéis de curto
circuito e as barras formam uma única peça intimamente
ligadas com o pacote magnético do rotor e pode ter
diferentes formas geométricas, como mostrado na Figura
2. Para melhorar as condições de partida, o eixo das
ranhuras não é paralelo ao eixo do rotor, mas sim
deslocado de uma ranhura em relação a este [4].
As equações de tensão que descrevem o
comportamento elétrico da máquina de indução trifásica e
simétrica podem ser expressas por:
vabcs = rs iabcs +
d
λabcs
dt
(3)
vabcr = rr iabcr +
d
λabcr
dt
(4)
onde vabcs e vabcr são os vetores das tensões de fase do
estator e do rotor nas coordenadas abc em Volts (V),
respectivamente, iabcs e iabcr são os vetores das correntes de
fase do estator e do rotor nas coordenadas abc em Ampére
(A), respectivamente, rs e rr são as matrizes diagonais com
as resistências próprias dos circuitos do estator e do rotor
em Ohm (Ω), respectivamente, λabcs e λabcr são os vetores
dos enlaces de fluxo dos enrolamentos do estator e do
rotor em Weber (Wb), respectivamente [10].
Figura 2: Gaiola de esquilo em curto-circuito.
A. Modelagem elétrica
A modelagem da máquina de indução trifásica em regime
permanente pode ser feita considerando o equivalente
monofásico. No entanto, em regime transitório o
equivalente monofásico não é adequado, dado que
existem condições de manutenção de enlace de fluxo que
obrigam o aparecimento de correntes assimétricas nas
três fases, inviabilizando o equivalente monofásico [10].
A modelagem pode ser feita nas variáveis abc, utilizando
indutâncias próprias e mútuas entre enrolamentos de
estator e rotor. A Figura 3 mostra o arranjo espacial de
uma máquina simétrica de indução, de dois pólos, trifásica
ligada em estrela [11].
Figura 4: Circuito equivalente da máquina de indução,
dois pólos, trifásica conectada em estrela.
As indutâncias mútuas são variáveis com a posição do
rotor em relação ao estator e, portanto variáveis no tempo.
Porém, se for aplicada nas equações das tensões e enlaces
de fluxo uma transformação de variáveis abc para qd0
(com os eixos d e q girando na velocidade síncrona do
campo girante), as correntes e tensões se tornarão
constantes em regime permanente e terão frequência
reduzida durante períodos transitórios, propiciando
precisão numérica com passo de integração relativamente
grande [10]. As equações (3) e (4) submetidas á
transformação abc para qd0, terão expressões mais
simples com coeficientes constantes dadas por:
d
λqd 0 s
dt
d
′ + λqd
′ 0r
+ (ω − ωr )λqdr
dt
vqd 0 s = rs iqd 0 s + ωλqds +
Figura 3: Disposição espacial das bobinas no estator e no
rotor de uma máquina de indução trifásica.
A Figura 4 mostra o circuito equivalente onde cada
enrolamento do estator possui Ns número de espiras e
uma resistência equivalente igual à rs [11]. O circuito do
rotor é considerado como tendo enrolamentos idênticos,
senoidalmente distribuídos, com Nr número de espiras e
uma resistência equivalente igual à rr.
′ 0 r = rr′ idq
′ 0r
vqd
(5)
(6)
onde,
(λdqs )T = [λds
− λqs
0]
(7)
′ )T = [λdr
′
(λdqr
′
− λqr
0]
(8)
4
Agora temos que os índices d e q representam as
grandezas elétricas do estator e do rotor no novo sistema
de coordenadas e o símbolo (´) indica que as variáveis do
rotor estão referidas ao circuito do estator. A velocidade
angular do sistema de coordenadas qd0 é dada por ω e a
velocidade angular elétrica do rotor é dada por ωr sendo
que ambas as velocidades são dadas em (rad/s).
Reescrevendo as equações em sua forma expandida, têmse:
d
λqs
dt
d
vds = rs ids − ωλqs + λds
dt
d
v0 s = rs i0 s + λ0 s
dt
d
′ = rr′ iqr
′ + (ω − ω r )λdr
′ + λqr
′
vqr
dt
d
′ = rr′ idr
′ − (ω − ω r )λqr
′ + λdr
′
vdr
dt
d
v0′ r = rr′ i0′ r + λ0′ r
dt
vqs = rs iqs + ωλds +
(9)
(10)
3
(21)
′ idr
′ + vqr
′ iqr
′ )
P = (vds ids + vqs iqs + vdr
2
3
2
2
′2 + iqr
′2 ) − ω Mids iqr
′
P = [rs (ids
+ iqs
) + rr′ ( idr
(22)
2
′ − ωm Miqs idr
′ + ωm Mids iqr
′ ]
+ ω Miqs idr
onde
rs (ids2 + iqs2 )
é
a
potência
ativa
dissipada
na
rr′( idr′2 + iqr′2 )
representa a potência
resistência do estator,
ativa dissipada na resistência refletida do rotor e o termo
ωMiqs idr′ − ωMids iqr′ + ωm Mids iqr′ − ωm Miqsidr′
(11)
(12)
(13)
(14)
onde os enlaces de fluxo são dados por:
′ )
= Lls iqs + M (iqs + iqr
(15)
′ )
λds = Lls ids + M (ids + idr
λ0s = Lls i0s
(16)
(17)
′ = Llr′ iqr
′ + M (iqs + iqr
′ )
λqr
(18)
′ + M (ids + idr
′ )
λdr′ = Llr′ idr
(19)
λ0′r = Llr′ i0′ r
(20)
λqs
A potência ativa P que consume a máquina de indução é
dadas por:
A Figura 5 mostra os circuitos elétricos equivalentes,
nas coordenadas qd0, obtidos a partir das equações (7) e
(8) para a máquina de indução [11], [12].
é a parcela
de potência ativa convertida na máquina de indução.
Já a potência reativa Q na máquina de indução fica
expressada como:
3
′ idr
′ − vdr
′ iqr
′ )
Q = (vqs ids − vds iqs + vqr
2
3
2
2
Q = [(ω Lls + ω M )(ids
+ iqs
)
2
′ + iqs iqr
′ )
+ (ω M + ωm M )(ids idr
(23)
(24)
′2 + iqr
′2 )]
+ (ωm Llr′ + ωm M )(idr
ω L (i 2 + i 2 )
ω L ′ (i ′ 2 + i ′ 2 )
ls ds
qs
m lr dr
qr
onde,
e
são as potências
reativas na indutância de dispersão do estator e rotor
ω M (i 2 + i 2 )
ω M (i '2 + i '2 )
ds
qs
dr
qr
respectivamente,
e m
são as
potências reativas na indutância de magnetização devido à
circulação das correntes de estator e rotor
(ω M + ω M )( i i ' + i i ' )
m
ds dr
qs qr
é a
respectivamente, e
potência reativa na indutância de magnetização devido à
interação entre as correntes que circulam no estator e
rotor [10].
B. Modelagem Mecânica
Esta modelagem descreve os fenômenos mecânicos que
ocorrem na dinâmica da máquina de indução. Dessa forma,
temos que:
3 P 1
Te = ψ ds iqs +ψ qs ids
2 2 ωb
(
d
1
ωm = (Te − Tm )
dt
J
Figura 5: Circuitos elétricos equivalentes da máquina de
indução trifásica para um sistema de coordenadas
arbitrário: (a) eixo q; (b) eixo d; (c) eixo 0.
)
(25)
(26)
onde, Te é o conjugado eletromagnético desenvolvido pela
máquina em (N.m), Tm é o conjugado mecânico aplicado no
eixo do rotor em (N.m); P é o número de pólos da máquina
de indução; ωm=(ω - ωr) é a velocidade mecânica do eixo
do rotor em (rad/s) e J é a inércia do rotor em (kg.m2).
Frequentemente é conveniente trabalhar com os
parâmetros e variáveis em p.u. (por unidade) pelo qual
escolhendo a potência base e a tensão base
adequadamente, todas as variáveis e todos os parâmetros
5
da máquina podem ser normalizados. Se a máquina de
indução opera isoladamente, sua potência nominal em
[VA] é selecionada como potência base. Porém, se esta
máquina faz parte de um SEP, a potência base será igual à
escolhida para todo o sistema [10]. Considerando que a
máquina de indução está funcionando isolada do SEP, o
conjugado base TB pode ser expresso pela seguinte
relação:
TB =
PB
(2 / P )ωb
(27)
onde ωb corresponde à frequência base ou nominal e PB é a
potência nominal, ambas da máquina de indução.
Normalizar a equação (24) significa dividi-la por TB e
normalizar ωm com a velocidade base ωb. Assim, temos
que:
J (2 / P ) wb d ω m
(Te − Tm ) =
TB
dt ωb
(28)
Além disso, por definição, a constante de inércia dada
em segundos é:
2
2
1 2 J ω 1 2 J ωb
H = b =
2 P TB
2 P PB
(29)
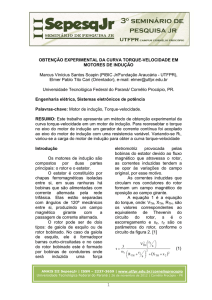
Dessa forma a equação (24) normalizada se torna:
(Te − Tm ) = 2 H
estator é afetada pela velocidade primaria do gerador, pela
capacidade do banco de capacitores e pela impedância da
carga [2].
d ωm
dt ωb
(30)
Figura 6: Curva de magnetização e linha de carga dos
capacitores de um GIAE
A. Modelagem Clássica dos GIAE
Segundo [12] a operação em regime permanente dos
GIAE pode ser analisada utilizando o circuito equivalente
convencional representado na Figura 7. Nesta figura, a é a
frequência [p.u.], b a velocidade [p.u.], R é a resistência da
carga por fase [Ω], R1 e X1 são a resistência e reatância do
estator por fase [Ω], R2 e X2 são a resistência e reatância
do rotor por fase referida ao estator [Ω], XC é a reatância
capacitivo devido aos capacitores C e relacionado à
frequência [Ω], Xm é a reatância de magnetização por fase e
relacionada à frequência [Ω], e V é a tensão nos terminais
do gerador por fase [V].
R2
a−b
V. GERADORES DE INDUÇÃO AUTOEXCITADOS (GIAE)
Quando uma máquina de indução é conduzida
externamente a uma velocidade maior à velocidade de
sincronismo (deslizamento negativo) a direção do
conjugado induzido no rotor é revertida e a máquina de
indução começa a funcionar como gerador. Nessa
condição, o fluxo magnético residual presente no rotor
induz uma pequena força eletromotriz (f.e.m.) nos
enrolamentos do estator. Esta pequena f.e.m. induzida gera
um fluxo de corrente no banco de capacitores os quais
fornecem a energia reativa demandada pelo gerador de
indução incrementando a f.e.m. induzida inicialmente. No
entanto, esta f.e.m. induzida não pode ser incrementada
infinitamente devido à saturação magnética da máquina de
indução. É importante salientar que ante a ausência de um
valor de magnetismo residual no rotor a tensão induzida
no gerador não poderá ser incrementada [3].
A tensão nos terminais do GIAE é dada pela interseção
da curva de magnetização do gerador com a linha de carga
do banco de capacitores [2]. Na Figura 6 mostram-se a
curva de magnetização de um GIAE descarregado (sem
carga) e a característica tensão-corrente de um banco de
capacitores, ambos os representados sobre o mesmo eixo
de coordenadas. A intersecção de ambas as curvas (ponto
1) é o ponto no qual o banco de capacitores fornece
exatamente a potência reativa demandada pelo gerador
[2]. Quando o GIAE é conectado a uma carga, tanto a
magnitude quanto a frequência da f.e.m. induzida no
R1
a
jX 2
jX1
IL
Im
I1
I2
jXm
E1
−
jX C
a2
R
a
V
a
Figura 7. Representação do circuito equivalente por fase
para o GIAE.
Nesta abordagem considera-se que todos os
parâmetros do circuito equivalente são independentes da
saturação a exceção da reatância de magnetização Xm. Aqui
a reatância de magnetização será saturada para a operação
da máquina como gerador, o qual não acontece para a
operação como motor. Nesse contexto, a análise do circuito
equivalente mostrado na Figura 7 resulta na determinação
das seguintes equações para operação em regime
permanente do gerador:
R1
RL + a
R2
a
−b
+
=0
2
R2
2
R1
2
( X 1 + X L ) + RL + X 2 + a − b
a
−
1
−
Xm
X2
R
X 22 + 2
a−b
onde temos que,
2
−
( X1 − X L )
R
( X 1 − X L )2 + RL + 1
a
2
=0
(31)
(32)
6
RL =
RX C2
( a ( a 2 R 2 + X C2 ))
XL =
R 2 X C2
( a 2 R 2 + X C2 )
(33)
(34)
Operando agora com o escorregamento, (31) pode ser
modificado como sendo:
s=−
R2 ( aR L + R1 )
2
a ( X 1 − X L ) 2 + ( aR L + R1 ) 2
eólica com GIDE.
O conversor pode ser dividido em duas partes, a saber:
o conversor do lado do rotor (Crotor) e o conversor do lado
da rede (Crede). Um capacitor ligado no lado de corrente
contínua (DC) atua como fonte de tensão DC. Um indutor
trifásico de acoplamento (L) é utilizado para conectar o
conversor com a rede elétrica [13].
(35)
onde a frequência gerada é definida como sendo:
a=
b
1− s
(36)
A utilização de um circuito equivalente para a análise
do GIAE leva a desprezar tanto a impedância do estator
quanto a reatância do rotor o que resulta em uma equação
de escorregamento dada por:
s=−
R2
R
(37)
Substituindo (37) em (36) temos a equação para
calcular o valor inicial da frequência a0 e iniciar o processo
de iteração:
a0 =
b
R
1+ 2
R
(38)
Uma vez que o valor da frequência gerada é conhecido,
o processo de iteração pode ser iniciado seguindo os
seguintes passos:
1. calcular o valor da frequência inicial a0 através de (38);
2. estimar o valor do escorregamento s com (35) após
substituir o valor de a por a0;
3. achar o novo valor da frequência gerada a’ utilizando o
valor calculado de escorregamento, obtido no passo 2,
através de (36);
4. comparar o novo valor de frequência a’ com a
frequência utilizada no passo 2, por exemplo a0. Nesta
comparação:
a' − a ≤ ε
0
se
(onde ε = 0.00000001), então a’ pode ser
considerada como frequência gerada.
Agora, esse novo valor de frequência gerada pode ser
utilizado para calcular a reatância de magnetização Xm,
utilizando (32) como:
1
Xm = −
( X 1 − X L )2
X2
(39)
+
2
2
R1
R2
2
2
X2 +
( X 1 − X L ) + RL +
a
a−b
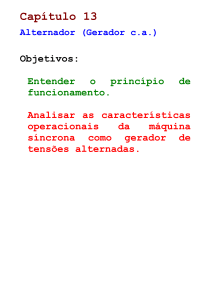
VI. GERADORES DE INDUÇÃO DE DUPLA EXCITAÇÃO (GIDE)
Um gerador de indução de dupla excitação é
basicamente uma máquina de indução de rotor bobinado,
cujo enrolamento do estator esta ligado diretamente à
rede elétrica e cujo enrolamento do rotor encontra-se
ligado à rede elétrica através do um conversor. Na Figura 8
mostra-se o fluxo de potência em um sistema de geração
Figura 8. Fluxo de potência em um GIDE.
Geralmente o valor absoluto do escorregamento, s, é
muito menor que um e, consequentemente, a potência
elétrica de saída do rotor (Pr) é somente uma fração da
potência elétrica de saída do estator (Ps). Visto que o
conjugado eletromagnético Tm é positivo para a geração de
energia, e dado que ωs é positivo e constante para uma
tensão e frequência constante da rede, o signo de Pr será
uma função do signo do escorregamento. Assim, teremos
um Pr positivo quando o escorregamento seja negativo
(velocidade do rotor maior à velocidade síncrona), e será
negativo quando o escorregamento seja positivo
(velocidade do rotor inferior à velocidade síncrona). Para
velocidade de operação supersíncrona, a potência do rotor
(Pr) será transmitida ao capacitor da barra DC quem
tenderá a elevar a tensão DC. Já para uma velocidade de
operação subsíncrona, Pr será retirada do capacitor da
barra DC e a tensão tenderá a diminuir. O conversor do
lado da rede é usado para gerar ou absorver a potência
elétrica Pgc a fim de manter a tensão DC constante.
A. Modelagem do GIDE em Regime Permanente
Para um correto desenvolvimento dos controladores de
tensão e frequência do GIDE, é necessário obter um
modelo matemático que descreva o comportamento
dinâmico deste gerador. Dentre os vários tipos de
modelagem possíveis, descritos em [13], a modelagem no
referencial síncrono qd0 é o mais utilizado atualmente.
A máquina de indução também pode ser representada
através do circuito equivalente monofásico do
transformador, como mostrado na Figura 9. Nesta figura,
Rr e Xr representam a resistência e a reatância do rotor
referidas ao lado do estator respectivamente. No circuito
primário (estator) é induzida uma tensão E1 que gera um
fluxo magnético variável concatenado pelo circuito
secundário (rotor). Nessa condição e como se fosse um
transformador ideal, gera-se no circuito do rotor uma
tensão Er [13].
7
R1
I1
jX1
1
I2
2
Ir
1
jXr
2
1
V1
Er
E1
jXm
RC
Rr
2
R1
I1
jX1
1
I2
2
1
jX2
2
1
V1
R2
2
E1
jXm
RC
2
Figura 9. Circuito equivalente convencional da máquina de
indução.
conjugado eletromagnético Tm é positivo para a geração
de energia, e dado que ωs é positivo e constante para uma
tensão e frequência constante da rede, o signo de Pr será
uma função do signo do escorregamento. Assim, teremos
um Pr positivo quando o escorregamento seja negativo
(velocidade do rotor maior à velocidade síncrona), e será
negativo quando o escorregamento seja positivo
(velocidade do rotor inferior à velocidade síncrona). Para
velocidade de operação supersíncrona, a potência do rotor
(Pr) será transmitida ao capacitor da barra DC quem
tenderá a elevar a tensão DC. Já para uma velocidade de
operação subsíncrona, Pr será retirada do capacitor da
barra DC e a tensão tenderá a diminuir. O conversor do
lado da rede é usado para gerar ou absorver a potência
elétrica Pgc a fim de manter a tensão DC constante [13].
VII. CONCLUSÕES
No entanto, o circuito equivalente da máquina de
indução mostrado na Figura 9, difere do circuito
equivalente do transformador ideal. Esta diferença deve-se
ao fato de que a frequência do rotor é variável em relação à
tensão Er induzida nele. No caso do gerador de indução de
dupla excitação, aparecerá uma tensão induzida no
enrolamento do rotor de forma tal que o circuito
equivalente da Figura 9 não representa corretamente o
comportamento do GIDE. Diante disso, este circuito deve
sofrer uma pequena modificação através da qual se
adiciona uma fonte de tensão V2/s no circuito do rotor,
como mostrada na Figura 10 [13].
I1
R1
1
jX1
I2
2
1
jX2
2
R2
2
1
V1
RC
jXm
E1
2
V2
s
Figura 10: Circuito equivalente do GIDE.
Considerando então o circuito equivalente apresentado
na Figura 10, a potência ativa e reativa do estator (PsW e
PsQ), do rotor (PrW e PsQ) e o conjugado eletromagnético Tm
podem ser representados como segue:
PsW = 3 ⋅ V1 ⋅ I1 ⋅ cos(Φ V1 − Φ I1 )
(40)
PsQ = 3 ⋅ V1 ⋅ I1 ⋅ sen ( Φ V1 − Φ I1 )
(41)
PrW = 3 ⋅ V2 ⋅ I 2 ⋅ cos( Φ V2 − Φ I 2 )
(42)
PrW = 3 ⋅ V2 ⋅ I 2 ⋅ sen (Φ V2 − Φ I 2 )
(43)
T = 3 ⋅ E1 ⋅ I r ⋅ cos( Φ E1 − Φ I 2 )
(44)
onde V1, I1 e V2, I2 são os valores efetivos (RMS) da tensão
e corrente do estator e o rotor respectivamente.
Geralmente o valor absoluto do escorregamento, s, é
muito menor que um e, consequentemente, a potência
elétrica de saída do rotor (Pr) é somente uma fração da
potência elétrica de saída do estator (Ps). Visto que o
Buscou se através deste trabalho contribuir com o
estudo dos geradores de indução. Nesse contexto, uma
breve descrição sobre a modelagem e funcionamento do
Gerador de Indução com Rotor Gaiola de Esquilo, GIAE e
GIDE.
As pesquisas bibliográficas realizadas confirmam que a
estabilidade transitória dos aerogeradores com rotor
gaiola é pobre, no entanto os sistemas eólicos de
velocidade variável, baseados nos geradores duplamente
excitados, contribuem para o aumento da margem de
estabilidade transitória e para a controlabilidade do
sistema elétrico.
O gerador de indução autoexcitado mostra-se como o
mais adequado gerador para conversão de energia eólica
em áreas remotas e ventosas. A análise desta máquina em
regime permanente é essencial para a estimação do
comportamento baixo as condições de operação atuais. Em
operação com velocidade variável, um gerador de indução
necessita uma interface (conversor) para transformar a
frequência variável de saída em uma frequência fixa
fornecida à carga. Esta interface para GIAE trata-se de uma
ponte de diodos. Por fim, concluiu-se que a frequência, o
deslizamento, a tensão induzida no entreferro, e a faixa de
operação dos GIAE são afetadas pelas características
próprias dos geradores de indução e pelo tamanho dos
capacitores selecionados para o chaveamento.
As características elétricas do GIDE são fortemente
afetadas pela tensão rotórica injetada. Mudando a
amplitude e o ângulo da tensão rotórica injetada, as
características de velocidade e conjugado do GIDE
derivam-se da faixa de velocidade supersíncrona e
subsíncrona para a geração de energia e também se
incrementa o conjugado desenvolvido pelo GIDE,
melhorando assim a estabilidade de operação. Uma das
vantagens desta máquina é a de que, como se tem dupla
excitação, sendo uma delas a frequência da rede, pode –
se garantir que se esta inserindo de volta na rede elétrica
uma frequência sincronizada com a mesma. O modelo do
GIDE no referencial do fluxo estatórico apresenta a
potência ativa dependente da corrente rotórica de eixo d, e
a potência reativa dependente da corrente de eixo q. Este
8
fato permite controlar a potência ativa e reativa do sistema
independentemente.
Por fim, sugere-se
se como trabalho de pesquisa futuro
avaliar o desempenho do gerador de indução, em todas
suas variedades (rotor gaiola de esquilo, rotor bobinado),
operando em pequenas centrais hidrelétricas
hidre
operando
isoladamente.
VIII. REFERENCIAS
[1] J. P. A. Vieira, R. G. Barros, M. V. Alves Nunes, U. H. Bezerra, T. M.
Branco, “Avaliação da estabilidade transitória de aerogeradores
assíncronos interligados à rede elétrica,” In: Seminário Brasileiro
Sobre Qualidade da Energia Elétrica, Belém Pará -Brasil, 2005.
[2] Y. N. Anagreh, I. M. Al-Refae’e,
Refae’e, “Teaching the self-excited
self
induction
generator using Matlab,” International Journal of Electrical
Engineering Education, vol. 40. no. 1, pp. 55--65, 2001.
[3] R. C. Bansal, “Three-phase self-excited
excited induction generator
generators: an
overview,” IEEE Transactions on Energy Conversion, vol. 20, no. 2,
June 2005.
[4] J. Rocha Pinto, “Conversão Eletromecânica de Energia,” Faculdade de
Engenharia de Sorocaba, 2003, Sorocaba, pp. 86-100.
86
[5] E. D. Basset, F. M. Potter, “Capacitive excitation of
o induction
generator,” Transactions AIEE, 2005, vol. 54, pp. 540
540-545.
[6] C. F. Wagner, “Self-excitation
excitation of induction motors,” AIEE Transaction
on Electrical Engineering, 1939, vol. 58, pp. 47-51.
47
[7] F. T. Ulaby, “Eletromagnetismo Para Engenheiros,” Bookman
Editorial, Porto Alegre, 2007, pp. 32-240.
[8] S. R. Dos Santos, “Proposta para implantação de microcentrais
hidrelétricas automatizadas com o emprego de geradores
assíncronos,” Dissertação de Mestrado apresentada ao PPGEE da
UFRGS, 2003, Porto Alegre, Brasil, pp.35-36.
36.
[9] A. E. Fitzgerald, C. Kingsley, S. D. Umans, “Electric Machinery,” 5th
ed., New York, McGrawHill, 1990.
[10] P. C. Krause, O. Wasynczuk, S. D. Sudhoff, “Analysis of Electric
Machinery,” IEEE Press, New York, 1995, pp. 164
164-209.
[11] P. M. Santillán, M. M. Villena, “Electromagnet compatibility study in
renewable energy inductor generator,” In: IEEE Power Tech
Conference, Porto, Portugal, 2001
[12] D. Joshi, K. Sandhu, and M. K. Soni, “Performance analysis of selfself
excited induction generator using artificial neur
neural network,” Iranian
Journal of Electrical and Computer Engineering, vol. 5, no. 1, WinterWinter
Spring 2006.
[13] B. Babypriya, R. Anita, “Modelling, simulation and analysis of doubly
fed induction generator for wind turbines,” Journal of electrical
engineering, vol. 60, no. 2, pp. 79-85, 2009.
Mario Orlando Oliveira (M’2008) na
nasceu em Capioví,
Mnes, Argentina em Maio de 1979. Obteve o título de
Engenheiro Eletromecânico
ânico pela Universidade Nacional
de Misiones (UNaM), Argentina em
e 2005 e Mestrado em
Sistemas Elétricos de Potência
ncia pela
p
Universidade
Federal do Rio Grande do Sul (UFRGS), Brasil em
e 2009.
Atualmente é pesquisador do Centro de Estudios de
Energía para el Desarrollo (CEED) e professor na UNaM.
Diomar Adonis Copetti Lima nasceu em Ijuí, Rio Grande
do Sul,
ul, Brasil em Janeiro de 1983. Obteve título de
Engenheiro Eletricista pela Universidade Regional do
Noroeste do Estado do Rio Grande – UNIJUI em 2010.
Atualmente é estudante do programa de pós
pós-graduação
da Universidade Federal do Rio Grande do Sul – UFRGS.
Suas áreas de interesse incluem energias renováveis,
proteção e localização de faltas no sistemas elétricos.
Lucas Alejandro Walantus nasceu em Eldorado, Mnes,
Argentina em Março de 1986. Obteve o título de
Engenheiro Eletromecânico pela Universidade Nacional
de Misiones (UNaM) Argentina em 2011. Atualmente é
aluno de Mestrado na Universidade Federal do Rio
Grande do Sul - UFRGS e pesquisador do Centro de
Estudios
ios de Energía para el Desarrollo (CEED),
Argentina.
Arturo Suman Bretas (M’1998) nasceu em Baurú, SP,
Brasil, em Julho de 1972. Obt
Obteve o título de Engenheiro
Eletricista e Mestrado
estrado em Engenharia Elétrica pela
Universidade de São Pablo, Brasil eem 1995 e 1998
respectivamente. Recebeu
Rec
o título de Ph.D em
Engenharia Elétrica pela Virginia Polytechnic Institute
and State University, Blacksburg, VA, em
e
2001.
Atualmente é professor
profe
associado na Universidade
Federal do Rio Grande do Sul, Porto Alegre, Brasil.
Oscar Eduardo Perrone nasceu em Venado Tuerto, Santa
Fé, Argentina em Dezembro de 1954. Obteve o título de
Engenheiro Eletromecânico pela Universidade Nacional
de Córdoba (UNC) Argentina em
e 1982. Atualmente é
pesquisador do Centro de Estudios de Energía para
p
el
Desarrollo (CEED), diretor do departamento de
Engenharia Electromecânica
Electromec
e professor titular na
Universidade Nacional de Misiones. As áreas de
interesse são medições e instalações elétricas.
Ronald Wilfr
Wilfredo Orellana Paucar nasceu em Ica, Perú
em Mayo de 1981. Obt
Obteve o título de Engenheiro
Mecânico-Eletricista
Eletricista pela
p
Universidade Nacional San
Luis Gonzaga, Perú eem 2006 e realizou estudos de pósgraduação na Universidade
Universidad Federal do Rio Grande do
Sul, Porto Alegre, Brasil. Atualmente está trabalhando
na Gerencia de Fiscaliza
Fiscalização Elétrica do Organismo
Supervisor de la Inversión en Energía y Minas
(Osinergmin), Perú. As áreas de inter
interesse são proteção e confiabilidade
de sistemas elétricos de potencia.