Centro Universitário Positivo - UnicenP
Núcleo de Ciências Exatas e Tecnológicas – NCET
Engenharia da Computação
Ederson Cichaczewski
Sistema Computacional de Auxílio ao Diagnóstico e
Avaliação de Tremores
Curitiba
2004
1
Centro Universitário Positivo - UnicenP
Núcleo de Ciências Exatas e Tecnológicas – NCET
Engenharia da Computação
Ederson Cichaczewski
Sistema Computacional de Auxílio ao Diagnóstico e
Avaliação de Tremores
Monografia apresentada à disciplina de
Projeto Final, como requisito à conclusão
do Curso de Engenharia da Computação.
Orientador: Prof. José Carlos da Cunha
Curitiba
2004
i
TERMO DE APROVAÇÃO
Ederson Cichaczewski
Sistema Computacional de Auxílio ao Diagnóstico e Avaliação de Tremores
Monografia aprovada como requisito à conclusão do curso de Engenharia da
Computação do Centro Universitário Positivo, pela seguinte banca examinadora:
Prof. José Carlos da Cunha (Orientador)
Prof. Luiz Carlos Pessoa Albini
Prof. Mauricio Schafranski
Curitiba, 10 de Dezembro de 2004
ii
AGRADECIMENTOS
Agradeço a Deus por ter me encaminhado neste projeto e me dado forças para tê-lo
realizado com sucesso.
Agradeço ao meu pai Casemiro e minha mãe Aíra pelo amor e pelo grande apoio em
todas as circunstâncias e também ao meu irmão Everton e minha irmã Liliane por estarem
sempre acreditando em mim.
Agradeço ao professor e grande amigo José Carlos da Cunha por ter me confiado este
projeto, me orientado e auxiliado enormemente. Inclusive por proporcionar a entrada do projeto
no hospital para testes e validação.
Agradeço ao Dr. Edison Nóvak por ter me recebido cordialmente no Hospital de Clínicas
e também ao residente Felipe Nóvak por ter me acompanhado atenciosamente nos testes com os
pacientes no Ambulatório de Neurologia.
Agradeço aos demais professores, aos meus amigos e colegas que estiveram ao meu lado
seja auxiliando no projeto, seja nos momentos de descontração, também fazendo parte desta
realização.
iii
SUMÁRIO
RESUMO ........................................................................................................................................ 9
ABSTRACT .................................................................................................................................. 10
1 INTRODUÇÃO ......................................................................................................................... 11
1.1 Tremor..................................................................................................................................... 11
1.2 Doença de Parkinson............................................................................................................... 15
1.2.1 Quadro Clínico ..................................................................................................................... 15
1.2.2 Parkinsonismo e Mal de Parkinson ...................................................................................... 16
1.2.3 As causas da doença de Parkinson ....................................................................................... 16
1.2.4 Mecanismos de Produção da Doença................................................................................... 17
1.2.5 Tratamento ........................................................................................................................... 18
1.2.6 Histórico da Doença de Parkinson ....................................................................................... 19
1.2.7 Diagnóstico da Doença de Parkinson................................................................................... 20
1.3 Acelerômetro........................................................................................................................... 23
1.4 Amplificador de Instrumentação.............................................................................................26
1.5 Filtro a Capacitores Chaveados............................................................................................... 28
1.6 Microcontrolador 8031............................................................................................................ 34
1.7 FFT .......................................................................................................................................... 36
1.7.1 Definição .............................................................................................................................. 36
1.7.2 Algoritmo ............................................................................................................................. 37
1.8 MySQL.................................................................................................................................... 40
2 DESCRIÇÃO ............................................................................................................................. 44
2.1 Introdução ao Tema do Projeto ............................................................................................... 44
2.2 Motivação do Desenvolvimento.............................................................................................. 44
2.3 Situação do Projeto no Contexto Geral em que está Inserido .................................................45
2.4 Análise de Cenário (Macro ambiente) ....................................................................................45
2.5 Metas a Serem Alcançadas...................................................................................................... 46
3 ESPECIFICAÇÃO TÉCNICA...................................................................................................47
3.1 Aspectos Funcionais................................................................................................................ 47
3.2 Módulos do Sistema ................................................................................................................ 48
3.3 Especificação do Hardware..................................................................................................... 50
3.3.1 Funções do Hardware........................................................................................................... 50
3.3.2 Componentes utilizados ....................................................................................................... 50
3.3.3 Diagrama em blocos com descrição..................................................................................... 50
3.3.4 Ambiente de desenvolvimento ............................................................................................. 55
3.4 Especificação do Software ...................................................................................................... 56
3.4.1 Linguagem e ferramenta de desenvolvimento ..................................................................... 56
3.4.2 Interface com o usuário ........................................................................................................ 56
3.4.3 Fluxograma com descrição................................................................................................... 56
3.5 Estimativa de Investimento ..................................................................................................... 58
3.6 Especificação de Validação do Projeto ................................................................................... 59
4 PROJETO................................................................................................................................... 60
4.1 Hardware ................................................................................................................................. 60
4.1.1 Aquisição.............................................................................................................................. 60
4.1.2 Composição.......................................................................................................................... 62
4.1.3 Filtragem .............................................................................................................................. 62
4.1.4 Elevação da Referência ........................................................................................................ 63
4.1.5 Conversão A/D..................................................................................................................... 64
4.1.6 Gerenciamento da Comunicação..........................................................................................65
iv
4.1.7 Comunicação com o Computador ........................................................................................ 67
4.1.8 Esquemático Completo do Hardware................................................................................... 67
4.2 Software .................................................................................................................................. 70
4.2.1 Casos de Uso ........................................................................................................................ 70
4.2.2 Diagrama de Classes ............................................................................................................ 71
4.2.3 Diagramas de Seqüência e Diagramas de Estados ...............................................................72
4.2.4 Interface................................................................................................................................ 75
4.2.5 Banco de Dados.................................................................................................................... 81
5 RESULTADOS.......................................................................................................................... 82
6 CONCLUSÃO ........................................................................................................................... 86
7 REFERÊNCIAS BIBLIOGRÁFICAS.......................................................................................87
v
LISTA DE FIGURAS
Figura 1 – Sistema extrapiramidal (Adaptado de [Zonamedica]) .................................................11
Figura 2 – Sistema massa-mola (adaptado de [Budzinski, 1999]) ................................................23
Figura 3 – Placas e Haste formando o micro-capacitor (adaptado de [Weinberg, 1999]) ............24
Figura 4 – Estrutura interna do acelerômetro (adaptado de [Doscher]) ........................................ 25
Figura 5 – Acelerômetro em escala 1:1 (adaptado de [Analog, 2003a]).......................................25
Figura 6 – Estrutura de um amplificador de instrumentação ........................................................ 26
Figura 7 – Princípio da equivalência resistor/capacitor chaveado (adaptado de [Zebulum, 1999])
............................................................................................................................................... 30
Figura 8 - Exemplo de um circuito com capacitores chaveados de três entradas (adaptado de
[Zebulum, 1999]) .................................................................................................................. 31
Figura 9 - Grafo de fluxo de sinais correspondente ao circuito mostrado em (a) (Adapatado de
[Zebulum, 1999]) .................................................................................................................. 32
Figura 10 - Sistema com ROM interna e RAM adicional externa (adaptado de [Ferlin, 2000]) .. 35
Figura 11 – Seqüência do algoritmo butterfly............................................................................... 38
Figura 12 – Multiplicações do método butterly ............................................................................ 38
Figura 13 – (a) Sistema (b) 2 eixos de trabalho dos acelerômetros (c) Sinais adquiridos ............ 47
Figura 14 - Disposição dos acelerômetros ....................................................................................47
Figura 15 – Visão geral do projeto................................................................................................ 48
Figura 16 – Diagrama em blocos detalhado do hardware do sistema ........................................... 50
Figura 17 – Posicionamento dos acelerômetros............................................................................51
Figura 18 – Estrutura interna dos acelerômetros ADXL311 e ADXL203 (adaptado de [Analog,
2003b]) .................................................................................................................................. 51
Figura 19 – Estrutura interna do INA128 (adaptado de [Burr-Brown, 2004]) .............................52
Figura 20 – Estrutura interna do filtro TLC04 (adaptado de [Burr-Brown, 1995]) ...................... 52
Figura 21 – Amplificador Operacional OP07 (adaptado de [Texas, 2002]) ................................. 53
Figura 22 – Estrutura interna do ADC0808 (adaptado de [National, 1997]) ................................53
Figura 23 – Fluxograma do software ............................................................................................ 57
Figura 24 – Diagrama do acelerômetro de 2g ............................................................................... 60
Figura 25 – Diagrama do acelerômetro de 1,5g ............................................................................ 61
Figura 26 – Diagrama do amplificador de instrumentação INA 128 ............................................ 62
Figura 27 – Diagrama do filtro passa-baixa de 20 Hz...................................................................62
Figura 28 – Diagrama do circuito elevador do nível de referência ............................................... 63
Figura 29 – Diagrama do conversor analógico / digital ................................................................ 64
Figura 30 – Fluxograma do algoritmo executado no 8031 ...........................................................66
Figura 31 - Diagrama esquemático do circuito de aquisição ........................................................ 68
Figura 32 - Diagrama esquemático do kit 8031 ............................................................................69
Figura 33 – Casos de uso do software...........................................................................................70
Figura 34 – Diagrama de classes do software ............................................................................... 71
Figura 35 – (a) Diagrama de seqüência e (b) diagrama de estados do cadastro do paciente ........ 72
Figura 36 – Diagramas de seqüência e estados para a avaliação do paciente ...............................73
Figura 37 – Diagramas de seqüência e estados para a avaliação monitorada do paciente............ 74
Figura 38 – Tela de avaliação ....................................................................................................... 75
Figura 39 – Tela de monitoração................................................................................................... 76
Figura 40 – Tela de cadastro do paciente...................................................................................... 77
Figura 41 – Tela de cadastro do médico ....................................................................................... 77
Figura 42 – Tela de cadastro do tremor.........................................................................................78
Figura 43 – Tela de cadastro do remédio ...................................................................................... 78
Figura 44 – Tela de emissão de receita .........................................................................................79
Figura 45 – Tela de histórico do paciente ..................................................................................... 79
vi
Figura 46- Tela do histórico da monitoração do tremor do paciente ............................................ 80
Figura 47 – Software de gerenciamento do banco de dados MySQL........................................... 81
Figura 48- Teste de tremor de repouso.......................................................................................... 83
Figura 49- Teste de tremor postural .............................................................................................. 83
Figura 50- Teste de tremor cinético .............................................................................................. 83
Figura 51- Sinal de amplitude ....................................................................................................... 84
Figura 52- Espectro de freqüências no software ........................................................................... 84
Figura 53- Espectro de freqüências no Matlab.............................................................................. 84
Figura 54- Sinal de amplitude de um paciente sem tremor........................................................... 85
Figura 55- Espectro de freqüências de um paciente sem tremor................................................... 85
vii
LISTA DE TABELAS
Tabela 1- Tipos de tremor, etiologia e características clínicas e eletrofisiológicas (adaptado de
[Rosenberg, 2000])................................................................................................................ 12
Tabela 2- Diagnóstico diferencial dos tremores (adaptado de [Rosenberg, 2000]) ...................... 13
Tabela 3- Fatores que intensificam o tremor fisiológico (adaptado de [Rosenberg, 2000]) .........14
Tabela 4- Doença de Parkinson Versus Tremor essencial (adaptado de [Rosenberg, 2000]) ...... 14
Tabela 5- Estimativa de custos...................................................................................................... 58
Tabela 6- Diagnósticos dos pacientes analisados.......................................................................... 82
viii
LISTA DE SIGLAS
ADC - Conversor analógico-digital
AOP - Amplificador operacional
DP - Doença de Parkinson
FFT - Transformada Rápida de Fourier
g - Aceleração da gravidade
GND - Aterramento, nível lógico nulo
Hz - Mega Hertz
INA - Amplificador de Instrumentação
K - kilo (103)
M - Mega (106)
SQL - Linguagem Estruturada para Pesquisas
VCC - Tensão de limentação
9
RESUMO
Doenças relacionadas a tremores, como o Mal de Parkinson entre outros, vêm sendo cada
vez mais preocupantes devido a grande ocorrência de casos. Atualmente, o diagnóstico deste tipo
de enfermidade é feito de forma precária e demorada, sendo que a única base que o médico
possui para a avaliação do paciente é sua experiência clínica. O presente trabalho tem como
objetivo abordar o desenvolvimento de um sistema, baseado em hardware e software, para
auxílio ao diagnóstico e avaliação dos diferentes tipos de tremores. O sistema fornece
informações quantitativas do tremor, para que o médico possa reavaliar o paciente em futuras
consultas e acompanhar melhor o estado deste, podendo verificar se os medicamentos estão
surtindo o efeito desejado. O sistema utiliza como elemento sensor, para a aquisição do tremor,
três acelerômetros acoplados à mão e ao antebraço do paciente de forma não-invasiva, fazendo a
aquisição de sinais referentes à aceleração provocada pela vibração devido ao tremor. Este
conjunto de sensores está ligado a um circuito de aquisição, composto por filtros, amplificadores
diferenciais, amplificadores somadores, conversor analógico-digital e microcontrolador, o qual
se comunica com um computador que faz a amostragem e armazenamento, dos sinais recebidos,
através de um software. O software dispõe de todo o procedimento para a consulta médica,
armazena informações específicas do paciente, e também apresenta gráficos de amplitude e
freqüência dos sinais adquiridos, sendo estes também armazenados em um banco de dados.
Palavras-chave: Parkinson, Tremor, Neurologia, Engenharia Biomédica.
10
ABSTRACT
Tremor sickness like Parkinson’s disease, between others, has been more preoccupying,
because the great occurs of the cases and, currently, the diagnosis of this kind of sickness is done
precariously and demand of much time; the unique thing that the physician is based of, to do the
diagnosis, is his clinic experience. This document has by objective show a project of a system,
hardware and software based, which provides an auxiliary to the diagnosis and evaluation of
different kinds of tremor. The system furnishes quantitative information about tremor, for the
physician is able to reevaluate the patient in a future consultation and to a better accompaniment
of his clinic state. The system sensors, for the acquisition of tremor, are three accelerometers
connected to the hand and the arm of the person, at non-invasive form. These sensors are linked
to an acquisition system that is composed by filters, differential amplifiers, adder amplifiers,
analog-digital converter and a microcontroller. This acquisition system communicates with a
computer, and it does the sampling and the storage of the data received by a software. The
software provides all the process for a physician consultation, storing specific information of the
patient, and shows amplitude and frequency graphics from the acquired signal, that are stored in
a database too.
Keywords: Parkinson, Tremor, Neurology, Biomedical Engineering.
11
1 INTRODUÇÃO
1.1 Tremor
Tremores são distúrbios dos movimentos caracterizados por movimentos oscilantes,
involuntários e rítmicos produzidos quando os músculos antagônicos contraem e relaxam
repetidamente, síncrona ou alternadamente, ocasionados por alterações patológicas neuronais
([Rosenberg, 2000]; [DCN Merck]).
Tais alterações ocorrem nos núcleos da base ou em suas conexões (sistema
extrapiramidal), observado na Figura 1 [Zonamedica]. Os núcleos da base são um grupo de
núcleos de substância cinzenta que se situam profundamente nos hemisférios cerebrais, no
diencéfalo e no mesencéfalo [Rosenberg, 2000]. É no mesencéfalo que se encontra a substância
negra, associada especificamente à bradicinesia e ao tremor de repouso (parkinsoniano).
Figura 1 – Sistema extrapiramidal (Adaptado de [Zonamedica])
Tendo verificado o tremor involuntário, deve-se fazer a avaliação de características, tais
como ritmicidade, velocidade, freqüência, duração, padrão (repetitivo, em fluxo, contínuo),
indução (induzido por estímulos, pela ação ou pelo exercício), complexidade dos movimentos,
supressibilidade pela atenção volicional (controlada) ou truques sensitivos, e se os movimentos
são acompanhados por inquietação ou urgência em liberar a tensão acumulada [Rosenberg,
2000].
12
A abordagem clínica do tremor começa com uma avaliação das suas características, como
apresenta a Tabela 1[Rosenberg, 2000].
Tabela 1- Tipos de tremor, etiologia e características clínicas e eletrofisiológicas (adaptado de [Rosenberg,
2000])
Tipo de tremor
Etiologia
Repouso
Doença de
Parkinson
Ação ou
manutenção da
postura
Ação e
manutenção da
postura
Ação,
manutenção de
postura e
algumas vezes
em repouso
Cinético e de
manutenção de
postura
Características clínicas e eletrofisiológicas
Tremor de 3 a 6 Hz, ocorrendo em repouso, suprimido por
manutenção da postura ou ação. Costuma ser proeminente
durante o andar. Não é infreqüente que o tremor de
repouso da doença de Parkinson retorne com manutenção
de postura prolongada dando um “tremor de repouso reemergente”.
Tremor
Tremor de 8 a 12 Hz, ocorrendo com ação e manutenção
fisiológico
da postura. Costuma ser induzido por estresse, precipitante
exagerado
ou medicamento específico. A freqüência do tremor é
reduzida por carga inercial.
Tremor essencial Tremor postural e cinético simétrico dos membros
superiores, geralmente na faixa de 4 a 10 Hz, devido aos
músculos antagônicos em co-contração. O tremor essencial
pode ser ocasionado pelas tarefas do exame neurológico.
Pode interferir com as atividades cotidianas, inclusive a
escrita.
Tremor
Classicamente descrito como tremor intencional, ou
mesencefálico,
algumas vezes tremor atáxico, o tremor mesencefálico
tremor de
pode manifestar-se como combinação dos tremores de
Holmes
repouso, postural e de ação. A freqüência do tremor
geralmente fica entre 2 a 5 Hz. A causa mais comum deste
tremor é uma lesão focal no mesencéfalo, afetando vias
cerebelotalâmicas e nigrostriatais devido a trauma,
acidente vascular cerebral, hemorragia e esclerose
múltipla.
Distonia
Tremor irregular assíncrono, geralmente afetando os
membros superiores ou o pescoço. O tremor distônico não
tem características eletrofisiológicas específicas, mas a
distonia se manifesta como antagonistas que co-contraem.
O tremor pode diminuir com uma artimanha sensitiva ou
quando é assumida uma postura de “ponto nulo”. Inclui
tremor primário da escrita e tremor de tarefas específicas.
O tremor pode ser causado por amplo espectro de afecções clínicas e neurológicas. O
diagnóstico diferencial de tremor pode ser categorizado em tremores do repouso e tremores de
ação, conforme mostra a Tabela 2 [Rosenberg, 2000].
13
Tabela 2- Diagnóstico diferencial dos tremores (adaptado de [Rosenberg, 2000])
Tremores de repouso
Tremores de ação
Doença de Parkinson e outras causas Tremores posturais
de parkinsonismo
Tremores fisiológicos
Intensificação do tremor fisiológico
Tremor essencial
Tremor postural associado à doença de Parkinson,
distonia, mioclonia
Tremor mesencefálico ou rubral
Tremor cerebelar
Tremor associado a neuropatia
Neuropatia hereditária, lesão de nervo periférico,
distrofia simpática reflexa, doença do neurônio motor
Distúrbios heredodegenerativos
Tremor Cinético
Doença de Wilson,
Distúrbios cerebelares
neuroacantocitose, doença de
Esclerose múltipla, trauma, acidente vascular
Hallervorden-Spatz, doença de
cerebral, atrofia olivopontocerebelar (AOPC)
Gerstmann-Straussler-Scheinker,
Lesões mesencefálicas
lipofuscinose ceróide
Tremor essencial severo
Tremores de tarefa ou de posição específica
Tremor primário da escrita
Tremor distônico
Tremor ortostático
Tremor mesencefálico ou rubral
Isométrico
Miorritmia
Basicamente, há duas categorias de tremores: o normal (fisiológico) e o anormal
(patológico) [DFT Scielo].
O tremor normal ocorre na freqüência de 8-13 Hz e uma das explicações para sua
existência é a de que seria o reflexo do balistocardiograma, isto é, da vibração passiva dos
tecidos do corpo produzida pela atividade mecânica do coração. Não é habitualmente percebido,
podendo, no entanto, ser exacerbado por certas condições, tais como: situações de medo e
ansiedade, distúrbios metabólicos (hipertireoidismo, hipoglicemia), exercícios físicos, retirada de
álcool e uso de certas drogas (lítio, prednisona). Nessas condições há aumento do débito
cardíaco, sendo exemplos de exacerbações do tremor fisiológico [DFT Scielo]; a Tabela 3
apresenta fatores que intensificam o tremor fisiológico [Rosenberg, 2000].
O tremor patológico é bem mais lento, ocorrendo na freqüência de 4-7 Hz (a metade do
normal). Atinge certos grupos como partes distais dos membros, cabeça, língua, mento, corda
vocal e, raramente, o tronco [DFT Scielo].
14
Tabela 3- Fatores que intensificam o tremor fisiológico (adaptado de [Rosenberg, 2000])
Fatores psicossociais
Estresse
Ansiedade
Excitação
Medo
Fatores metabólicos
Cansaço
Febre
Tireotoxicose
Hipoglicemia
Feocromocitoma
Abstinência de drogas
Álcool
Benzodiazepínicos
Opiáceos
Toxinas
Bismuto
Chumbo
Arsênico
Metilbrometo
Fatores de dieta
Cafeína
Glutamato monoassódico
Drogas
Agonistas beta-adrenérgicos
Teofilina
Metaproterenol
Terbutalina
Adrenalina
Pseudoefedrina
Drogas psicoativas
Antidepressivos tricíclicos
Neurolépticos
Lítio
Agonistas da dopamina
Dopamina
Anfetamina
Anticonvulsivantes
Valproato
Tiroxina
Nicotina
Corticosteróides
Anticolinesterases
Bloqueadores dos canais de cálcio
Nimodipina
Flunarizina
Agentes antiarrítmicos cardíacos
Amiodarona
Lidocaína
Procainamida
As síndromes parkinsonianas são as mais comuns e os outros distúrbios representam
apenas um pequeno grupo de pacientes. Um dos problemas clínicos mais freqüentes e
importantes ao avaliar um paciente com tremor é decidir se é devido à doença de Parkinson ou a
um tremor essencial. A Tabela 4 apresenta um comparativo entre os dois tipos de tremor
[Rosenberg, 2000].
Tabela 4- Doença de Parkinson Versus Tremor essencial (adaptado de [Rosenberg, 2000])
Característica
Doença de Parkinson
Tremor essencial
Tremor
Ocorre em repouso
Diminui com manutenção de
postura ou ação
Aumenta com o caminhar
Assimétrica, algumas vezes
unilateral
Mãos, pernas
Micrográfico
Meia-idade ou terceira-idade
Manutenção de postura e ação
Distribuição
Parte corporal
Desenho de uma espiral
Idade de início
Simétrica
Mãos, cabeça, voz
Trêmulo
Todas as idades
15
Evolução
Progressiva
Parentes em primeiro grau
Outros sinais neurológicos
Geralmente não afetados
Bradicinesia, rigidez,
instabilidade postural
Anticolinérgicos, levodopa
Tremor diminui com
Estável ou lentamente
progressiva
Costumam ser afetados
Ausentes
Álcool, propranolol, primidona
Alguns tipos de tremores possuem um exame clínico ou laboratorial para diagnóstico,
outros não, como o Mal de Parkinson.
Dentre todos os tipos de tremores, os que têm mais significância atualmente são os
relacionados à doença de Parkinson, os quais merecem um estudo mais aprofundado.
1.2 Doença de Parkinson
A doença de Parkinson (DP) é um dos distúrbios do movimento mais encontrado na
população idosa, representando até 2/3 dos pacientes que visitam os grandes centros de
distúrbios do movimento em todo mundo. A prevalência da DP tem sido estimada entre 85 e 187
casos por 100.000 pessoas. A incidência e as taxas de prevalência aumentam com a idade. O
início do quadro clínico ocorre geralmente entre 50 e 70 anos de idade [Meneses e Teive, 1996].
Segundo dados fornecidos pelo Ministério da Saúde, a DP atinge cerca de 200 mil pessoas no
Brasil [UNIFESP]. Contudo, pode-se encontrar pacientes com início da doença mais precoce,
antes dos 40 anos e até mesmo abaixo dos 21 anos de idade. A DP pode ocorrer em pessoas de
ambos os sexos, apesar de alguns estudos epidemiológicos demonstrarem uma maior freqüência
no sexo masculino e nas diferentes raças e classes sociais [Meneses e Teive, 1996]. A freqüência
da doença aumenta com a idade. Com o envelhecimento da população observado no Brasil e no
resto do mundo, é lógico prever que a prevalência desta doença na população em geral aumente
no futuro próximo [Equipe UNC].
1.2.1 Quadro Clínico
A sabedoria popular associa a doença de Parkinson com tremor, porém a característica
mais precoce da doença é uma redução dos movimentos espontâneos, a chamada bradicinesia,
que quer dizer falta de movimentos. Outros sintomas mais comuns que o tremor desde o início
da doença são a dificuldade de andar, uma dificuldade com equilíbrio quando a pessoa está de pé
e a postura arcada que os neurologistas chamam de postura parkinsoniana. O tremor é
16
tipicamente de repouso, ou seja, aparece quando os membros estão parados, sejam os braços, as
pernas e até o queixo. O tremor está diretamente ligado à rigidez, a uma dureza ou falta de
flexibilidade dos membros, do tronco e do pescoço. Esta rigidez, chamada de rigidez em roda
denteada, é notada no exame físico pelos neurologistas [Equipe UNC].
A DP não é uma doença fatal, nem contagiosa, não afeta a memória ou a capacidade
intelectual do parkinsoniano na maioria dos casos [Site ABP]. Existem casos de parkinsonismo
em que o paciente possui sintomas de outras doenças como a demência, parecida com o mal de
Alzheimer, juntamente com os sintomas da DP [Equipe UNC].
1.2.2 Parkinsonismo e Mal de Parkinson
Parkinsonismo é o termo aplicado aos pacientes que tem sintomas parecidos com doença
de Parkinson, porém não a doença mesmo. O quadro clínico é muito semelhante, porém estes
pacientes têm uma causa para seus sintomas, enquanto que a doença de Parkinson é uma
enfermidade progressiva do cérebro de causa desconhecida. Nos portadores da síndrome do
parkinsonismo a evolução da doença básica é que define a evolução dos sintomas neurológicos,
enquanto que a doença de Parkinson tem uma evolução lentamente progressiva sempre. Causas
comuns de parkinsonismo são intoxicações por medicamentos de labirinto, arteriosclerose
cerebral e certas formas de demência parecidos com doença de Alzheimer [Equipe UNC].
Quando um médico faz menção a uma síndrome parkinsoniana, não está necessariamente se
referindo à doença de Parkinson, embora a possibilidade de se tratar dessa doença seja grande
[eMedix].
1.2.3 As causas da doença de Parkinson
A causa da doença de Parkinson permanece desconhecida apesar de enormes esforços em
inúmeros laboratórios de pesquisa em todo o mundo. É óbvio que quem descobrir a causa da
doença também descobrirá uma pista importante para a cura, e sem dúvida isto levará no mínimo
ao Premio Nobel. A razão da dificuldade é que a causa provavelmente é múltipla e não única.
Deve haver uma predisposição genética e um ou mais fatores ambientais, provavelmente algum
tóxico ambiental.
Estudos mais recentes indicam que pode ser prevista uma origem genética da doença: a
grande maioria dos pacientes que se apresentam com doença de Parkinson familiar ou em idade
17
muito jovem são claramente de origem genética, e o defeito genético pode ser localizado nestes
pacientes, por laboratórios muito especializados.
Os estudos também indicam que a maioria dos pacientes, aqueles que não tem uma
história familiar tão clara, cuja doença começa depois dos 30 anos de idade, também podem ter
uma origem em grande parte genética. O mais provável hoje em dia é que estes pacientes tenham
vários estados de herança do gene que regula a proteína parkina. Ou seja, eles receberam um
gene recessivo de um dos pais e um gene mais ou menos de outro, e podem ou não desenvolver
diferentes graus da doença [Equipe UNC].
Existem 10 genes publicados que foram responsáveis pelo aparecimento de doença de
Parkinson em certas famílias. Estes genes, localizados nos cromossomos 2, 4, 6 e 12, trabalham
com certos circuitos bioquímicos no corpo dos neurônios no cérebro, regulando a produção e a
degradação de proteínas. Alguns destes genes são autossômicos dominantes, ou seja, a herança
não é ligada ao sexo e passa para 50% dos descendentes da pessoa que tiver o gen. Outros são
recessivos, só passam quando se combinam os genes do pai e da mãe sendo muito mais raro e
com freqüência nem aparece em várias gerações da família (adaptado de [Equipe UNC]).
Fatores que poderiam predispor à doença têm sido descritos, mas não há evidências
convincentes de que, realmente, sejam os responsáveis. Entre os possíveis fatores de risco
aventados para a DP estão: raça branca, fatores genéticos predisponentes, vida rural, hábito de
beber água de poço, trabalho na agricultura e exposição à química industrial, a herbicidas e a
pesticidas [Meneses e Teive, 1996].
1.2.4 Mecanismos de Produção da Doença
Fisiopatologia é o nome técnico para os mecanismos de produção da doença de Parkinson
(DP). Os corpos de Lewy (pronunciado Leuí) caracterizam o diagnóstico de DP. Estes enormes
detritos que ocupam os neurônios de muitos parkinsonianos foram bastante pesquisados e,
embora ainda sejam freqüentes, só podem ser diagnosticados em exames anatomopatológicos
(após a morte) [Equipe UNC].
Para a produção dos sintomas é necessária a morte dos neurônios negro-estriatais, aqueles
que conectam uma parte do cérebro, chamada de substância negra (células que produzem
dopamina), com outra parte chamada de corpo estriado [Equipe UNC]. A degeneração de
neurônios da zona compacta da substância negra resultará numa diminuição da produção de
dopamina, substância que conduz as correntes nervosas (neurotransmissores) ao corpo. Acredita-
18
se que a perda do impulso dopaminérgico no corpo estriado seja o fator responsável pela
principal sintomatologia da DP [Meneses e Teive, 1996].
A produção de corpos de Lewy é um mecanismo de “produção de doença” em portadores
da DP, uma forma de agregação de proteínas, que causa stress do retículo endoplasmático
(estrutura que mantém o neurônio armado, como a estrutura de concreto de uma construção) e
leva a apoptose (mecanismo de morte celular programada que ocorre no sistema nervoso central)
[Equipe UNC].
Estes mecanismos levam a um final common pathway, uma via final comum, que é a
apoptose (morte celular programada). Este é o mecanismo fisiopatológico de doença de
Parkinson [Equipe UNC].
1.2.5 Tratamento
É importante lembrar e compreender que atualmente não existe cura para a doença.
Porém, esta pode e deve ser tratada, não apenas combatendo os sintomas, como também
retardando o seu progresso. A grande barreira para se curar a doença está na própria genética
humana. No cérebro, ao contrário do restante do organismo, as células não se renovam. Por isso,
nada há a fazer diante da morte das células produtoras da dopamina na substância negra [Site
ABP].
A L-DOPA (levodopa) é, até agora, a principal arma terapêutica e um dos grandes
avanços da neurologia no século XX. [Equipe UNC]. A levodopa chega aos neurônios doentes e
aumenta sua produção de dopamina, diminuindo significativamente os sintomas da doença.
O problema é que só uma pequena parte da levodopa ingerida pela boca consegue
penetrar no cérebro. Como doses grandes de levodopa ingeridas pela boca causam muitos efeitos
colaterais, a indústria farmacêutica precisou desenvolver um comprimido com uma substância
que inibisse os efeitos da levodopa no resto do corpo, permitindo que uma dose menor
penetrasse no cérebro [Equipe UNC].
Porém, após poucos anos de uso, principalmente quando as doses são elevadas, ocorrem
efeitos colaterais importantes, na forma de tics e movimentos involuntários e, posteriormente, de
congelamentos e dificuldades motoras maiores. Para diminuir estes problemas, que mais cedo ou
mais tarde ocorrem em todos os pacientes parkinsonianos, muitas outras drogas foram
desenvolvidas a fim de melhorar a função dos neurônios dopaminérgicos, sem repor a dopamina.
O resultado é que o paciente parkinsoniano típico, depois de alguns anos de doença, acaba
tomando uma combinação de medicamentos [Equipe UNC].
19
O tratamento cirúrgico é restrito aos pacientes jovens, abaixo de 65 anos, com uma
doença rapidamente evolutiva e que não respondam ao tratamento clínico. As cirurgias
estereotáxicas consistem em lesões no núcleo pálido interno (Palidotomia) ou do tálamo ventrolateral (Talamotomia), que estão envolvidos no mecanismo da rigidez e tremor. Porém, a
lentidão de movimentos responde melhor aos medicamentos. Essas lesões podem diminuir a
rigidez e abolir o tremor. Não cura, simplesmente melhora a doença. A restrição a poucos casos
se deve ao efeito somente paliativo da cirurgia, e ao fato de que em torno de 8% dos pacientes
operados tem uma hemorragia cerebral durante o procedimento, ficando hemiplégicos ou
adquirindo outras seqüelas neurológicas graves. Estas são as estatísticas dos melhores centros
europeus e americanos [Equipe UNC].
Atualmente existe uma técnica chamada estimulação profunda do cérebro, que utiliza um
marcapasso cerebral. Este marcapasso é muito benéfico, especialmente para reduzir o tremor.
Com a sua difusão em todos os países, espera-se que a produção em larga escala possa tornar
este marcapasso cerebral acessível a um grande número de parkinsonianos em todo o mundo
[Site ABP].
1.2.6 Histórico da Doença de Parkinson
A primeira descrição da substância negra tem sido atribuída a Vicq D’Azyr, que a teria
incluído em seu tratado sobre a fisiologia do cérebro, publicado em 1786. Mais tarde seria
estabelecida a relação dessa estrutura com a doença de Parkinson [Meneses e Teive, 1996].
A doença de Parkinson foi descrita pela primeira vez por James Parkinson, médico inglês,
que em 1817 publicou em Londres um ensaio intitulado An Essay on the Shaking Palsy, que vem
a ser a primeira descrição bem definida da doença que hoje leva seu nome [Meneses e Teive,
1996].
Apesar da publicação e da divulgação do ensaio sobre a Paralisia Agitante por Parkinson,
a enfermidade, posteriormete intitulada “doença de Parkinson”, somente tornou-se bem
conhecida pelos neurologistas na segunda metade do século XIX [Meneses e Teive, 1996].
Algumas pesquisas foram realizadas e vários anos se passaram até que, em 1960,
Ehringer e Hornykiewicz associaram a doença de Parkinson com a depleção da produção de
dopamina nos circuitos motores subcorticais. Em 1967, Kotzias utilizou pela primeira vez
grandes doses de D-L-Dopa (forma dextrógira de levodopa) via oral, demonstrando significativo
efeito benéfico nos pacientes com doença de Parkinson. Posteriormente, a partir da década de 70,
apareceram preparações realmente eficientes. O uso da forma levógira da levodopa (L-Dopa) e o
20
acréscimo de inibidores da dopa-descarboxilase permitiram uma melhoria no tratamento, sem
efeitos colaterais tóxicos [Meneses e Teive, 1996].
1.2.7 Diagnóstico da Doença de Parkinson
Até o presente momento, não existe um exame laboratorial ou de imagens cerebrais que
possa ser utilizado de forma rotineira capaz de confirmar o diagnóstico da doença.
O diagnóstico da doença de Parkinson baseia-se inteiramente em dados clínicos
observados no exame do paciente, na história médica do caso e na eliminação de outras causas
conhecidas para uma síndrome parkinsoniana [eMedix].
O diagnóstico da doença de Parkinson é feito por exclusão. Às vezes os médicos
recomendam
exames
como
eletroencefalograma
(EEG),
tomografia
computadorizada,
ressonância magnética, análise do líquido espinhal, etc., para terem a certeza de que o paciente
não possui nenhuma outra doença no cérebro. O diagnóstico da doença faz-se baseada na história
clínica do doente e no exame neurológico. Não há nenhum teste específico para fazer o
diagnóstico da doença de Parkinson, nem para a sua prevenção.
A história usual do indivíduo que é acometido pela doença de Parkinson consiste num
aumento gradual dos tremores, maior lentidão de movimentos, caminhar arrastando os pés,
postura inclinada para frente [Site ABP].
A lentidão de movimentos é, talvez, o maior problema para o parkinsoniano. Uma das
primeiras coisas que os membros da família notam é que o doente demora mais tempo para fazer
as coisas que antes fazia com mais desenvoltura. Banhar-se, vestir-se, cozinhar, preencher
cheques. Tudo isso leva cada vez mais tempo. Quando a pessoa fica mais idosa, é comum
colocarem a culpa na sua velhice. "Claro que o avô é mais vagaroso, pois ele está ficando velho",
costuma-se dizer. Mas a lentidão de movimentos torna-se mais acentuada, e evolui mais
rapidamente do que a pessoa que envelhece normalmente.
O parkinsoniano perde uma certa automação dos movimentos, comparada com as pessoas
normais. Para uma pessoa normal abotoar a camisa é muito simples: abotoa-a, e pronto! O
parkinsoniano tem que guiar os dedos para o conseguir, como se fosse um robô a guiar uma
máquina. "Quando eu uso a minha mão boa, ela faz tudo por si. Quando uso a outra mão, tenho
que conscientemente controlá-la e dizer-lhe o que deve fazer". Esta perda automática ou não
consciente controle dos movimentos, explica porque os parkinsonianos piscam muito menos que
as pessoas normais e por isso parecem que sempre estão a nos olhar fixamente [Site ABP].
21
A rigidez muscular é outra característica da doença. O afetado pela doença pode ou não
senti-la, mas o médico pode verificar no consultório se ela existe nos braços, nas pernas e até no
pescoço. A face torna-se rígida e parece que está congelada. Quando se sentam têm também a
tendência de inclinar a cabeça e encolher os ombros [Site ABP].
De acordo com os critérios mais aceitos para o diagnóstico da DP entre quatro sintomas
cardinais (tremor de repouso, rigidez muscular, bradicinesia - falta de movimentos - e alterações
posturais), há a necessidade da existência de dois deles para a definição diagnóstica. Pacientes
que apresentem apenas um, não poderão ser incluídos no diagnóstico da DP [Meneses e Teive,
1996].
Para uma avaliação inicial do paciente que vai consultar informando ter a DP, o primeiro
procedimento do médico é examinar se o paciente possui sinais extrapiramidais, ou seja, de
instabilidade postural [Meneses e Teive, 1996]. O paciente assume uma postura muito
característica com a cabeça em ligeira flexão, tronco ligeiramente inclinado para frente, flexão
moderada da perna sobre a coxa e do antebraço sobre o braço, com exagero da rigidez nas mãos.
A imagem lembra a de um esquiador.
Com relação ao tremor, algumas vezes é utilizada a eletromiografia (EMG) para avaliar a
freqüência dos movimentos involuntários de repouso. Mas este exame não foi preparado para
este tipo de avaliação e não possui um sistema de análise que possa auxiliar o médico de forma
confiável.
O tremor chamado “tremor essencial” não é característico da DP, pois não ocorre em
situação de repouso e é mais rápido que o tremor da DP, tendo freqüência entre 4 e 10 Hz e o
tremor da DP tendo entre 3 e 6 Hz.
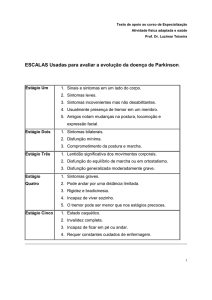
Para quantificar os estágios da DP, diferentes escalas são utilizadas [Meneses e Teive,
1996]:
-
Short Parkinson's Evaluation Scale (SPES);
-
Tremor / postural instability and gait disorder score (T/PIGD);
-
Modified Hoehn Yahr Staging (MHYS);
-
Schwab and England Activities of Daily Living Scale (SEADLS);
-
Kökmen’s Short Test of Mental Status (STMS);
-
Columbia University Rating Scale (CURS);
-
Northwestern University Disability Scale (NUDS);
-
Intermediate Scale for Assessment in Parkinson’s Disease (ISAPD);
-
Parkinson's Impact Scale (PIMS);
22
-
Unified Parkinson's Disease Rating Scale (UPDRS);
-
Escala de Estadiamento de Hoehn e Yahr.
A escala mais utilizada é a escala de estadiamento de Hoehn e Yahr. Esta escala é
definida da seguinte maneira:
• Estágio I – Doença unilateral apenas.
• Estágio II – Doença bilateral leve.
• Estágio III – Doença bilateral com comprometimento inicial da postura.
• Estágio IV – Doença grave, necessitando de muita ajuda.
• Estágio V – Preso ao leito ou cadeira de rodas. Necessita de ajuda total.
23
1.3 Acelerômetro
Acelerômetros são sensores capazes de converter a aceleração da gravidade ou o
movimento em sinais elétricos [Neto, 2000].
Os acelerômetros baseiam-se em dois princípios bastante conhecidos da física, a Lei de
Hook e a Segunda Lei do Movimento de Newton.
Um sistema formado por uma massa e uma mola é apresentado na Figura 2. Quando se
aplica uma força a esta mola, com a intenção de estendê-la, esta responderá com uma força
restauradora proporcional ao seu deslocamento; o mesmo vale para o caso onde se comprime a
mola. Este princípio é a Lei de Hook, matematicamente representada por F=k*x, onde (F) é a
força, (x) é o deslocamento e (k) é a constante de proporcionalidade entre a força e o
deslocamento [Budzinski, 1999].
O segundo princípio que rege o funcionamento dos acelerômetros diz que uma força,
agindo sobre uma massa que sofre uma aceleração, terá a magnitude de F=m*a. Este é
conhecido como a Segunda Lei do Movimento de Newton.
Figura 2 – Sistema massa-mola (adaptado de [Budzinski, 1999])
Novamente observa-se na Figura 2, que se a massa sofre uma aceleração em qualquer
sentido, esta sofre a ação de uma força de intensidade igual a m*, mas também sabemos que esta
mesma magnitude pode ser representa por k*x, então se obtém m*a=k*x. Isolando a aceleração
na equação anterior temos, a=(k*x)/m. Como geralmente conhece-se a constante (k) que é uma
característica da mola, e a massa (m) conectada à mola, o problema de medir a aceleração, na
condição de medição do deslocamento (x), é reduzido [Budzinski, 1999].
Existem vários tipos de sensores para medir aceleração. Considerando o método de
deslocamento de massa, pode-se contar com potenciômetros, LVDT, piezoelétricos e
capacitivos.
O acelerômetro do tipo capacitivo possui como elemento sensor um capacitor diferencial
cuja saída é proporcional à aceleração. É formado por várias hastes milimétricas entrecortadas
24
por placas de mesma proporção cuja capacitância diferencial será atribuída à área entre a haste e
as placas de acordo com a movimentação da haste. Um exemplo desta estrutura pode ser visto na
Figura 3.
Figura 3 – Placas e Haste formando o micro-capacitor (adaptado de [Weinberg, 1999])
O movimento da haste é controlado por um material elástico de polisilicone que sustenta
as hastes e, a partir daí, o comportamento do sistema segue as leis da física. As variáveis força,
massa e aceleração se relacionam conforma a Lei de Newton que é F = m.a [Weinberg, 1999].
A grandeza de medida utilizada para os acelerômetros é o g de força da gravidade em que
1g corresponde a 9,8m/s2.
Este tipo de acelerômetro é construído com a tecnologia MEMS (Micro-ElectroMechanical Systems) que é a integração de elementos mecânicos, sensores, atuadores e
eletrônicos em um mesmo substrato de silício através de uma tecnologia de microfabricação.
Dessa forma, a tecnologia passa a se chamar de iMEMS (Integrated Micro-Electro-Mechanical
Systems), devido a ser a fabricação de um componente “integrado”, como os conhecidos
circuitos integrados (IC – Integrated Circuit). Esta tecnologia é usada atualmente na fabricação
de milhões de unidades para a industria automotiva e várias outras aplicações, dentre elas a área
médica [MEMS].
A Figura 4 apresenta a estrutura interna do acelerômetro, identificando-se a parte central
do componente que é o braço móvel e, ao seu redor, inúmeras placas e hastes que formam os
micro-capacitores do sistema que mede o movimento de massa devido à aceleração [Doscher,
2004].
25
Figura 4 – Estrutura interna do acelerômetro (adaptado de [Doscher])
Na Figura 5 é apresentado o acelerômetro em questão [Analog, 2003a] comparado com
uma moeda equivalente à moeda de 1 centavo de real.
Figura 5 – Acelerômetro em escala 1:1 (adaptado de [Analog, 2003a])
Dentre as vantagens deste acelerômetro, destacam-se as seguintes [Analog, 2003a]:
-
Dois eixos (x e y) em um único chip;
-
Alimentação simples;
-
Baixo consumo;
-
Baixo custo;
-
Alta resolução;
-
Largura de banda ajustável por apenas um capacitor;
-
Oscilador interno;
-
Função de calibração;
-
Resistente a fortes impactos (1000 vezes maiores que a sua escala máxima).
26
1.4 Amplificador de Instrumentação
São amplificadores diferenciais acoplados diretamente e que apresentam alto ganho, alta
impedância de entrada e alta taxa de rejeição em modo comum (CMRR) [Boylestad, 1998].
Os amplificadores de instrumentação amplificam sinais diferenciais de baixa amplitude,
como, por exemplo, os produzidos por transdutores que podem ter um alto nível de ruído em
modo comum.
São geralmente utilizados em sistemas biomédicos de instrumentação, sensores e
transdutores industriais ou qualquer outro tipo de sistema que necessita a amplificação ou apenas
o tratamento de dois sinais diferenciais.
As CMRR’s dos amplificadores de instrumentação podem chegar facilmente a 80 ou 120
dB. A Figura 6 apresenta a configuração de um amplificador de instrumentação, que é formada
basicamente por amplificadores operacionais e resistores.
Figura 6 – Estrutura de um amplificador de instrumentação
Verificando na Figura 6, os amplificadores operacionais do estágio de entrada (que
possuem as entradas V1 e V2) estão configurados como amplificadores não inversores. O
circuito elimina a desvantagem da baixa impedância de entrada do amplificador diferencial
(estágio de saída), visto que os amplificadores operacionais de entrada estão configurados como
buffers [Boylestad, 1998].
Como os buffers tem ganho unitário, o amplificador do estágio de saída terá uma alta
CMRR, desde que os amplificadores operacionais utilizados na montagem tenham alta CMRR.
Também é necessário que os resistores utilizados sejam de precisão [Pertence, 1996].
O ganho total do amplificador de instrumentação da Figura 6 é dado por:
27
R
2R
G = 2 + 1. 4
R3
R1
(1)
Resumindo, as principais vantagens dos amplificadores de instrumentação são:
•
Alta impedância de entrada;
•
Elevado CMRR;
•
Baixa impedância de saída;
•
Ganho estável e ajustável por R1.
Existem amplificadores de instrumentação implementados em um único circuito
integrado, que são muito mais precisos e apresentam outras características de qualidade como
[Burr-Brown, 2004]:
•
Baixa tensão de offset (escala de µV);
•
Baixo drift (variação da precisão ocasionada pela variação de temperatura);
•
Baixa corrente de bias de entrada (devido à alta impedância de entrada);
•
Larga faixa de freqüência (200KHz – depende do ganho);
•
Baixo ruído (depende da freqüência).
28
1.5 Filtro a Capacitores Chaveados
Os processadores de sinais elétricos usualmente são divididos em duas categorias:
sistemas analógicos e sistemas digitais. Um sistema analógico opera com sinais em forma de
tensões, correntes e cargas as quais são funções contínuas de uma variável contínua no tempo.
Exemplos de sistemas analógicos de processamento são os amplificadores de áudio, os filtro RC
passivos e ativos, etc. Num sistema digital cada sinal é representado por uma seqüência de
números e como estes números contêm um número finito de dígitos binários (bits quando
codificados em forma binária) podem assumir somente valores discretos. Estes números são os
valores amostrados da amplitude do sinal em instantes discretos do tempo: no caso de um sinal
digital as variáveis dependente e independente são discretas. Exemplos de sistemas digitais são
um computador de propósito geral e um filtro digital usado na análise de voz [Cañive, 2001].
Os circuitos a capacitores chaveados pertencem a uma categoria classificada entre as duas
categorias descritas acima. Esta é a categoria de sistemas analógicos amostrados. Nestes sistemas
os sinais são representados pela amplitude, do sinal elétrico, não codificada (normalmente
tensão) como nos sistemas analógicos, mas esta amplitude do sinal é amostrada em instantes de
tempo discretos como nos sistemas digitais. A importância desta última categoria de circuitos se
deve às vantagens que oferece para ser integrada, em comparação com as outras categorias
[Cañive, 2001].
Circuitos a capacitores chaveados são extensivamente usados para implementar filtros
analógicos usando tecnologia de circuitos integrados, uma vez que suas características são
determinadas exclusivamente por um sinal de clock estável e razões de capacitores, tornando-se
de grande interesse encontrar novas soluções de projeto para implementações mais práticas e
econômicas. Em contraste com filtros digitais, onde a precisão é determinada por uma seleção
apropriada do número de bits necessários para os dados e os coeficientes do filtro, a precisão em
circuitos analógicos é determinada pelos parâmetros físicos do processo de implementação.
Conseqüentemente estruturas de baixa sensibilidade são de extrema importância em realizações
analógicas [Pereira, 2000].
O interesse por topologias com característica de fase aproximadamente linear tem se
intensificado. Áreas como, por exemplo, a de processamento de imagens necessitam filtros com
característica de fase linear que é conseguida com realizações FIR (resposta finita ao impulso)
mas muitas vezes devido a ordem elevada é inviável a utilização de tais filtros. Por isso uma
estrutura com fase aproximadamente linear na faixa de passagem torna-se uma solução cujos
resultados podem aproximar-se do desejado com a vantagem de ter ordem de realização
perfeitamente implementável. Uma vez que um filtro recursivo a capacitor chaveado (SC)
29
implementado com integradores possui uma boa performance, filtros a capacitores chaveados na
forma direta possuem varias vantagens quando da sua implementação integrada, tais como
redução do consumo de potencia e da área de silício utilizada e possibilidade de multiplicação de
dois ou mais filtros [Pereira, 2000].
Existem muitos métodos de projeto de filtros SC. A maioria dos métodos é baseada na
simulação de circuitos ladder LC duplamente terminados ou na síntese da função de
transferência diretamente no domínio Z, usando configurações em cascata ou multiple-loop
feedback. Estas duas aproximações usam lossless discrete integrator (LDI) como bloco principal
do circuito. Isto leva a que os filtros com este tipo de estruturas apresentem boas características
de sensibilidade com relação aos desvios das razões de capacitâncias [Cañive, 2001].
Mais recentemente tem sido reportado um método de projeto baseado na conexão em
paralelo de seções passa-tudo. A estrutura proposta apresenta alguns avanços em comparação
com estruturas padrões conhecidas. Comparando, esta estrutura, com um filtro elíptico padrão,
pode se observar que apresenta menor sensibilidade na banda de passagem às variações dos
coeficientes, além de precisar de menor capacitância para sua implementação. Apesar destas
características, esta estrutura tem algumas desvantagens práticas que podem comprometer sua
implementação de forma integrada. A seção passa-tudo de segunda ordem usada é sensível a
capacitâncias parasitas das placas superiores dos capacitores, o que deteriora a propriedade de
estrutura lossless. Também para altas freqüências de chaveamento a resposta em freqüência da
fase é sensível às variações das capacitâncias, que é importante para obter baixa atenuação na
banda de rejeição dos filtros [Cañive, 2001].
Em uma análise mais formal e uma argumentação teórica mais completa dos projetos de
filtros SC com baixa sensibilidade, usando conexão em paralelo de seções passa-tudo losssles
são apresentadas novas aproximações de estruturas 2 dos passa-tudo baseadas na “transformada
dos pólos” usando elementos acumuladores implementados por integradores LDI. Este tipo de
estrutura se apresenta como uma solução viável para implementação em forma integrada de
filtros SC de baixa sensibilidade [Cañive, 2001].
Ainda mais recentemente se apresenta uma versão aperfeiçoada de um filtro elíptico
baseado neste tipo de estrutura, junto com os resultados de simulações que mostram menor
sensibilidade em comparação com outras estruturas reportadas [Cañive, 2001].
Devido às inevitáveis variações dos processos de integração, acontecem desvios nos
parâmetros dos filtros, que podem levar o circuito a fugir das especificações do projeto. Por esta
razão, é importante a propriedade de baixa sensibilidade às variações dos coeficientes [Cañive,
2001].
30
Neste sentido a estrutura de filtro usando passa-tudos em paralelo se apresenta como uma
solução viável para integração. Apesar da alta precisão alcançada atualmente para a
implementação de razões de capacitâncias (0.1%-0.3%) com tecnologia CMOS, um pequeno
desvio ou discrepância nos valores das razões de capacitâncias pode levar a erros significativos
de fase e amplitude na resposta do filtro, que podem ser ainda maiores se o filtro não apresentar
baixa sensibilidade a estas variações [Cañive, 2001].
Circuitos baseados em capacitores chaveados operam como um processador de sinal em
tempo discreto, sendo, portanto, mais facilmente analisados através da transformada Z. Em
termos de implementação de filtros, a maior vantagem de circuitos baseados nesta tecnologia é a
acurácia de sua resposta em freqüência. Isto decorre do fato de que os coeficientes do filtro são
agora determinados por razões entre capacitâncias, cujos valores podem ser precisamente
determinados no processo de fabricação de circuitos integrados [Zebulum, 1999].
Os blocos de construção destes circuitos são amplificadores operacionais, capacitores,
chaves e relógios sem superposição de fase [Zebulum, 1999].
A operação de circuitos com capacitores chaveados pode, em muitos casos, ser analisada
através do princípio da equivalência resistor/capacitor chaveado. Este princípio é ilustrado
através da Figura 7. Nesta figura, φ1 e φ2 são sinais de relógio sem superposição de fase
[Zebulum, 1999].
Figura 7 – Princípio da equivalência resistor/capacitor chaveado (adaptado de [Zebulum, 1999])
No circuito da Figura 7 (a) corrente elétrica média é dada pela equação (1):
I avg =
C1(V 1 − V 2)
T
(1)
31
onde T é o período do relógio. Este circuito é equivalente ao resistor Req = T/C1, mostrado na
Figura 7 (b) [Zebulum, 1999].
Entretanto, a aproximação descrita acima é útil apenas na análise de circuitos que operam
em baixa freqüência em relação à freqüência do relógio. A medida em que a freqüência do sinal
de entrada aumenta, técnicas de análise em tempo discreto tornam-se necessárias. Através da
aplicação da transformada Z nas equações de transferência de carga no tempo discreto,
desenvolveu-se uma metodologia que permite uma análise mais direta destes circuitos,
denominada grafo de fluxo de sinais. Esta metodologia é exemplificada através da Figura 8 e da
Figura 9 [Zebulum, 1999].
De acordo com o circuito mostrado na Figura 8, a entrada V1(z) passa por um estágio
inversor simples; a entrada V2(z) passa por um estágio integrador não-inversor com atraso; e
V3(z) passa por um estágio integrador inversor sem atraso. Estes três circuitos são estágios
básicos usados em tecnologia de capacitores chaveados. Uma visão simplificada do circuito é
mostrada na Figura 9. Utilizando o princípio da superposição, a saída do circuito pode ser escrita
pela equação [Zebulum, 1999]:
C 1
C 2 z −1
C1
.
.V1 ( z ) +
.V ( z ) − 3 .
Vo( z ) = −
.V ( z )
−1 2
−1 3
CA 1+ z
CA 1+ z
CA
(2)
Figura 8 - Exemplo de um circuito com capacitores chaveados de três entradas (adaptado de [Zebulum,
1999])
32
Figura 9 - Grafo de fluxo de sinais correspondente ao circuito mostrado em (a) (Adapatado de [Zebulum,
1999])
Uma das maiores vantagens dos circuitos a capacitores chaveados (SC) (contém só
amplificadores, chaves e capacitores) é que todas as constantes de tempo, anteriormente
determinadas pelo produto RC, serão determinadas agora por expressões da forma T(C2/C1). O
período T do pulso de chaveamento é determinado por um circuito gerador de pulsos controlado
por um cristal de quartzo que é altamente preciso e estável. O outro fator da constante de tempo é
C2/C1 que é a razão de duas capacitâncias MOS. Fazendo uso de algumas simples regras no
layout destes elementos é possível obter uma precisão e estabilidade de ordem de 0.1% para a
implementação desta razão. A precisão final neste caso é pelo menos mil vezes melhor do que a
que pode ser alcançada usando resistores e capacitores integrados para a constante de tempo RC
[Cañive, 2001].
Há aplicações onde os sistemas em MOS de processamento analógico de sinais são
competitivos ou inclusive superiores a outras implementações. A seguir se relacionam algumas
das mais sobressalentes propriedades dos sistemas analógicos e se comparam com outras
alternativas de realização [Cañive, 2001]:
i)
Nos circuitos SC os pólos e zeros dependem unicamente das razões de capacitâncias
(e não dos valores absolutos), o que permite a realização de respostas altamente
seletivas com boa precisão e estabilidade. A constante de tempo dos circuitos SC é
proporcional ao período T da freqüência de chaveamento. Como resultado, a resposta
em freqüência do circuito todo H(f) pode ser escalada mudando a freqüência de
33
chaveamento fc=1/T. Mudando o valor de fc pelo valor de 2 fc simplesmente estamos
expandindo a curva de resposta horizontalmente por um fator de 2. Esta é uma forma
de realizar ajustes de respostas em aplicações como osciladores controlados por
tensão, filtros adaptativos, etc.
ii)
Como os circuitos SC trabalham com sinais analógicos, operações básicas como
multiplicação, soma, atraso são muito mais simples de realizar do que nos sistemas
digitais. Isto permite uma maior densidade de operações nos chips analógicos.
iii)
Devido à maior simplicidade das estruturas a capacitores chaveados e à menor área de
silício ocupada, o requerimento de potência DC para uma determinada tarefa de
processamento é significativamente menor para uma implementação a capacitores
chaveados do que para uma digital.
iv)
Por outro lado, os circuitos SC têm uma precisão limitada pela precisão das razões de
capacitâncias, e que é de cerca de 0.1%. Este valor é significativo para um sistema
analógico, mas só corresponde a uma precisão de 10 bits com ponto – flutuante para
um sistema digital. Para aplicações em que este valor é insuficiente, é necessário o
uso de sistemas digitais.
v)
Outro problema é a faixa dinâmica. Devido ao nível do ruído causado pelos
amplificadores operacionais, as chaves, linhas de alimentação e da freqüência de
chaveamento, a faixa dinâmica (razão sinal/ruído) de um circuito a SC é inferior
100dB. Nos circuitos digitais este valor pode ser ultrapassado com o aumento do
numero de bits utilizados para codificar os coeficientes do filtro e as amostras dos
sinais [Cañive, 2001].
34
1.6 Microcontrolador 8031
O Intel 8051 é um microcontrolador clássico, e é um verdadeiro microcomputador
contendo I/O paralelo, contadores/temporizadores, I/O serial, RAM, e EPROM ou ROM
(dependendo do tipo).
A família 8051 é composta por vários membros (a Intel se refere como a família MCS51), cada um adaptado para um tipo específico de sistema [Ferlin, 2000].
O 8051 contém 4Kbytes de ROM, a qual é definida/mascarada quando o chip é
produzido. O 8031 é destinado para aplicações expandidas e usa memória externa. O 8031 usa
três das quatro portas paralelas do chip para fazer o endereçamento convencional e um
barramento de dados com linhas apropriadas de controle.
Desde que o 8031 ainda contenha RAM, uma porta paralela, e uma porta serial - até
mesmo quando funciona como uma CPU principal de um circuito expandido - o número de chips
eventuais necessários para expandir o I/O ou memória é ainda consideravelmente pequeno
[Ferlin, 2000].
A Intel e outras companhias comercializam variações da família MCS-51 com mais
memória interna, mais I/O, baixa potência, e assim por diante. Um 80C31 é uma versão CMOS
de baixa potência do 8031, por exemplo. O 8052, é o mesmo que o 8051, exceto que tem outro
contador/temporizador e RAM e ROM adicionais.
Como se pode esperar tanto a fabricação da máscara quanto a construção do chip
demanda tempo e dinheiro. A programação por máscara faz sentido para uma aplicação que usa
milhares de 8051 idênticos, mas isto não é prático para baixo volume de sistemas e de protótipos
[Ferlin, 2000].
O 8031 não tem o programa armazenado no próprio chip. O sistema incluirá uma
EPROM externa e um “latch” de endereço, como visto na Figura 10. Considerando a queda de
preço das EPROMs e o pesado custo do uso de ambos os 8051s em pouca quantidade, o 8031 é
uma alternativa viável apesar dos chips adicionais. Para muitos sistemas pequenos, a combinação
8031/EPROM é muito melhor em custo/benefício do que um 8051.
Todos os membros da família MCS-51 tem o mesmo núcleo do hardware e, portanto,
usam o mesmo núcleo do conjunto de instruções.
A família de microcontroladores MCS - 51 foi desenvolvida para aplicações de controle e
oferece características de hardware sofisticadas que permitem seu uso no controle industrial,
periféricos inteligentes e em uma variada gama de produtos [Ferlin, 2000].
35
Figura 10 - Sistema com ROM interna e RAM adicional externa (adaptado de [Ferlin, 2000])
O 8031 é um membro desta família que não possui memória interna de programa, embora
toda a arquitetura interna seja a mesma. As características de hardware e software da família
8051 permitem a manipulação de bits com extrema facilidade e possibilitam o desenvolvimento
de sistema microprocessado de um único chip [Ferlin, 2000].
As características funcionais apresentadas abaixo referem-se ao microcontrolador 8051.
•
CPU de 8 bits otimizada para aplicações de controle;
•
Memória Interna de Programa ( 4 Kbytes );
•
Memória Interna de Dados ( 356 bytes );
•
2 Contadores/Temporizadores Programáveis de 16 bits;
•
1 Porta Serial Full - Duplex;
•
32 linhas de E/S;
•
Estrutura de Interrupção com dois níveis de prioridade e 5 fontes (2 externas, 3 internas);
•
RAM interna endereçável bit-a-bit;
•
64 Kbytes para Memória Externa de Programas;
•
64 Kbytes para Memória Externa de Dados.
36
1.7 FFT
1.7.1 Definição
A transformada rápida de Fourier (FFT - Fast Fourier Transform) transforma um sinal do
domínio do tempo para o domínio da freqüência [Lima, 2004].
A FFT utiliza os pontos digitalizados do sinal e a idéia é quebrar o problema de
amostragens de N pontos em N/2 (duas seqüências). Isto porque uma série dividida é mais fácil
de ser resolvida.
Para uma transformada discreta de Fourier (DFT – Discret Fourier Transform), N2
computações devem ser resolvidas. No entanto, para uma DFT de N/2 pontos são necessárias
apenas (N/2)2 = (N2)/4 computações.
Uma DFT de N pontos pode ainda ser dividida em uma FFT de N pontos e duas N/2
pontos DFTs. Isto reduz o número de cálculo para N+2*(N2)/4 = N+(N2)/2.
Então, desde que N é uma potência de 2, pode-se repetir o processo de decimação e
reduzir o número de computações para (N/2)log2(N) multiplicações.
Para uma DFT de 8 pontos seria necessária a execução de N2 ou 64 multiplicações
complexas. Isto acontece porque para cada X(m), nós temos que somar 8 produtos complexos, N
= 0 a 7. Para a implementação em FFT-2 radix seriam necessárias apenas 24 multiplicações
complexas [Lima, 2004].
Embora se saiba que uma FFT de N pontos requer N=2k amostras de entrada, quantas
amostras deve-se coletar para executar a FFT?
O intervalo de tempo da coleção de dados deve ser longo o bastante para satisfazer a
freqüência de resolução para uma dada taxa de amostragem fS.
O intervalo de tempo de coleta de dados é o recíproco da resolução de freqüência
desejada, e quanto mais se amostra em dada fS, mais precisa é a resolução; isto é, o intervalo de
tempo de coleta de dados é N/fS segundos, e a resolução de freqüência é fS/N Hz.
Æ Exemplo:
Precisa-se de uma resolução espectral de 5 Hz, então fS/N = 5Hz.
N = fS/ (resolução desejada) = fS/5 = 0.2 fS Hz
Neste caso se fS for 10 KHz, então N deve ser pelo menos 2000.
Escolhe-se N=2024 por causa da base 2.
37
DFT Æ FFT
N −1
DFT X [m] = ∑ x[n].e
− j 2πm
n
m
n = 1, 2, ..., N – 1
(1)
n =0
Reescrevendo a DFT de forma diferente, como a soma de dois termos, vemos que estes
dois termos representam duas DFTs; uma representa a DFT dos termos de índices pares e a outra
representa a DFT dos índices ímpares
FFT X (m) =
( N / 2 ) −1
∑
n =0
x(2n)W N2 mn + W Nm
( N / 2 ) −1
∑ x(2n + 1)W
n =0
2 mn
N
(2)
Seqüência par [A(m)] Seqüência ímpar [B(m)]
X (m) = A(m) + W Nm B (m) , m = 0 a (N/2)-1, onde N é o número de pontos da amostragem.
O resultado da FFT é um vetor de números complexos em que a parte real representa a
amplitude dos cossenos e a parte imaginária representa a amplitude dos senos.
1.7.2 Algoritmo
Tendo definida a taxa de amostragem e o tamanho da amostra, deve-se realizar a
realocação reversa de bits (RRB) no vetor do sinal no domínio do tempo. Esta realocação deve
ser feita para tornar o cálculo da FFT mais eficiente. A idéia é criar um vetor de indexação com a
nova ordenação. Este novo vetor tem na primeira metade as amostras pares e na outra metade as
amostras ímpares, e todos os pares de amostras, consecutivamente, têm a diferença entre os seus
indexadores sempre igual a N/2.
Exemplo: O vetor 0-1-2-3-4-5-6-7 após passar pela RRB fica 0-4-2-6-1-5-3-7. Percebe-se
que o número de amostras é igual a 8, portanto N = 8. A diferença entre os pares é sempre N/2 =
4, ou seja: 4-0 = 4; 6-2 = 4; 5-1 = 4; 7-3 = 4.
O próximo passo é realizar as somas no domínio da freqüência. Existem vários
procedimentos, mas o mais comum é o Radix-2 utilizando o método butterfly [George e Chu,
2000].
Inicialmente o algoritmo entende que o sinal de N amostras é, na verdade, N sinais de 1
amostra. Como a soma é feita no domínio da freqüência, um termo chamado fator de giro é
considerado no cálculo, que é o termo W já visto anteriormente, ele representa a fase do sinal.
Este termo determina o pulo dentro da circunferência para o número de amostras em que o sinal,
38
nesta etapa do algoritmo, é composto, visto que na primeira etapa do algoritmo as N amostras do
sinal são consideradas como N sinais de uma amostra. A cada etapa do algoritmo o número de
sinais é reduzido pela metade e o número de amostras de cada sinal é uma potencia de 2. A
Figura 11 mostra a execução do algoritmo butterfly para um sinal de 8 amostras.
Figura 11 – Seqüência do algoritmo butterfly
Para explicar melhor cada passo das multiplicações, a Figura 12 apresenta uma
multiplicação de dois sinais de uma amostra.
C = A + WzB
e
D = A + Wz+N/2B
Fazendo ϕ = WzB tem-se:
C=A+ϕ
e
Figura 12 – Multiplicações do método butterly
D=A-ϕ
39
O resultado das multiplicações é a FFT procurada, lembrando que o vetor deve ser
reindexado para as posições originais de forma que as amostras em freqüência sejam
apresentadas corretamente. Para saber a freqüência predominante, deve-se fazer o módulo de
cada resultado da FFT para saber o valor das magnitudes em função da freqüência.
40
1.8 MySQL
O programa MySQL® é um servidor robusto de bancos de dados SQL (Structured Query
Language - Linguagem Estruturada para Pesquisas) muito rápido, multi-tarefa e multi-usuário
[MySQL, 2003].
O Servidor MySQL pode ser usado em sistemas de produção com alta carga e missão
crítica bem como pode ser embutido em programa de uso em massa [MySQL, 2003].
MySQL, o mais popular sistema de gerenciamento de banco de dados SQL Open Source,
é desenvolvido, distribuído e tem suporte da MySQL AB. A MySQL AB é uma empresa
comercial, fundada pelos desenvolvedores do MySQL, cujos negócios são fornecer serviços
relacionados ao sistema de gerenciamento de banco de dados MySQL [MySQL, 2003].
O MySQL é um sistema de gerenciamento de bancos de dados. Um banco de dados é
uma coleção de dados estruturados. Ele pode ser qualquer coisa desde uma simples lista de
compras a uma galeria de imagens ou a grande quantidade de informação de uma rede
coorporativa. Para adicionar, acessar, e processar dados armazenados em um banco de dados de
um computador, é necessário um sistema de gerenciamento de bancos de dados como o Servidor
MySQL. Como os computadores são muito bons em lidar com grandes quantidades de dados, o
gerenciamento de bancos de dados funciona como a engrenagem central na computação, seja
como utilitários independentes ou como partes de outras aplicações [MySQL, 2003].
O MySQL é um sistema de gerenciamento de bancos de dados relacional. Um banco de
dados relacional armazena dados em tabelas separadas em vez de colocar todos os dados em um
só local. Isso proporciona velocidade e flexibilidade. SQL é a linguagem padrão mais comum
usada para acessar banco de dados e é definida pelo Padrão ANSI/ISO SQL [MySQL, 2003].
O MySQL é um software Open Source. Open Source significa que é possível para
qualquer um usar e modificar o programa. Qualquer pessoa pode fazer download do MySQL
pela Internet e usá-lo sem pagar nada. O MySQL usa a GPL (GNU General Public License Licença Pública Geral GNU) disponível em http://www.fsf.org/licenses, para definir o que você
pode e não pode fazer com o software em diferentes situações [MySQL, 2003].
Por que usar o Banco de Dados MySQL? O servidor de banco de dados MySQL é
extremamente rápido, confiável, e fácil de usar. O Servidor MySQL foi desenvolvido
originalmente para lidar com bancos de dados muito grandes de maneira muito mais rápida que
as soluções existentes e tem sido usado em ambientes de produção de alta demanda por diversos
anos de maneira bem sucedida. Apesar de estar em constante desenvolvimento, o Servidor
MySQL oferece hoje um rico e proveitoso conjunto de funções. A conectividade, velocidade, e
41
segurança fazem com que o MySQL seja altamente adaptável para acessar bancos de dados na
Internet [MySQL, 2003].
O Programa de Banco de Dados MySQL é um sistema cliente/servidor que consiste de
um servidor SQL multitarefa que suporta acessos diferentes, diversos programas clientes e
bibliotecas, ferramentas administrativas e diversas interfaces de programação (API's) [MySQL,
2003].
A seguinte lista descreve algumas das características mais importantes do Programa de
Banco de Dados MySQL [MySQL, 2003].
- Portabilidade:
•
Escrito em C e C++.
•
Testado com um amplo faixa de compiladores diferentes.
•
Funciona em diversas plataformas.
•
Utiliza o GNU Automake, Autoconf, e Libtool para portabilidade.
•
API’s para C, C++, Eiffel, Java, Perl, PHP, Python, Ruby e Tcl estão disponíveis.
•
Suporte total a multi-threads usando threads diretamente no kernel. Isto significa que se
pode facilmente usar múltiplas CPUs, se disponível.
•
Fornece mecanismos de armazenamento transacional e não transacional.
•
Tabelas em disco (MyISAM) baseadas em árvores-B extremamente rápidas com
compressão de índices.
•
É relativamente fácil se adicionar outro mecanismo de armazenamento. Isto é útil se for
necessário adicionar uma interface SQL a um banco de dados caseiro.
•
Um sistema de alocação de memória muito rápido e baseado em processo(thread).
•
Joins muito rápidas usando uma multi-join de leitura única otimizada.
•
Tabelas hash em memória que são usadas como tabelas temporárias.
•
Funções SQL são implementadas por meio de uma biblioteca de classes altamente
otimizada e com o máximo de performance. Geralmente não há nenhuma alocação de
memória depois da inicialização da pesquisa.
•
O código do MySQL foi testado com Purify (um detector comercial de falhas de
memória) e também com o Valgrind, uma ferramenta GPL.
•
Disponível como versão cliente/servidor ou embutida (ligada).
42
- Tipos de Coluna:
•
Aceita diversos tipos de campos: tipos inteiros de 1, 2, 3, 4 e 8 bytes com e sem sinal,
FLOAT, DOUBLE, CHAR, VARCHAR, TEXT, BLOB, DATE, TIME, DATETIME,
TIMESTAMP, YEAR, SET e ENUM.
•
Registros de tamanhos fixos ou variáveis, comandos e funções.
•
Completo suporte a operadores e funções nas partes SELECT e WHERE das consultas.
Por exemplo:
mysql> SELECT CONCAT(first_name, " ", last_name) FROM nome_tbl WHERE
income/dependents > 10000 AND age > 30;
•
Suporte pleno às cláusulas SQL GROUP BY e ORDER BY. Suporte para funções de
agrupamento (COUNT(), COUNT(DISTINCT ...), AVG(), STD(), SUM(), MAX() e
MIN()).
•
Suporte para LEFT OUTER JOIN e RIGHT OUTER JOIN com as sintaxes SQL e
ODBC.
•
Alias em tabelas e colunas são disponíveis como definidos no padrão SQL92.
•
DELETE, INSERT, REPLACE, e UPDATE retornam o número de linhas que foram
alteradas (afetadas). É possível retornar o número de linhas com padrão coincidentes
configurando um parâmetro quando estiver conectando ao servidor.
•
O comando específico do MySQL SHOW pode ser usado para devolver informações
sobre bancos de dados, tabelas e índices. O comando EXPLAIN pode ser usado para
determinar como o otimizador resolve a consulta.
•
Nomes de funções não conflitam com nomes de tabelas ou colunas. Por exemplo, ABS é
um nome de campo válido. A única restrição é que para uma chamada de função, espaços
não são permitidos entre o nome da função e o ‘(’ que o segue.
•
Você pode misturar tabelas de bancos de dados diferentes na mesma pesquisa.
- Segurança:
•
Um sistema de privilégios e senhas que é muito flexível, seguro e que permite verificação
baseada em estações/máquinas. Senhas são seguras porque todo o tráfico de senhas é
criptografado quando se conecta ao servidor.
- Escalabilidade e limites:
•
Lida com bancos de dados enormes. Usa-se o Servidor MySQL com bancos de dados que
contém 50.000.000 registros e sabe-se de usuários que usam o Servidor MySQL com
60.000 tabelas e aproximadamente 5.000.000.000 de linhas.
43
•
São permitidos até 32 índices por tabela. Cada índice pode ser composto de 1 a 16
colunas ou partes de colunas. O tamanho máximo do índice é de 500 bytes (isto pode ser
alterado na compilação do MySQL). Um índice pode usar o prefixo de campo com um
tipo CHAR ou VARCHAR.
- Conectividade:
•
Os clientes podem se conectar ao servidor MySQL usando sockets TCP/IP, em qualquer
plataforma. No sistema Windows na família NT (NT, 2000 ou XP), os clientes podem se
conectar usando named pipes. No sistema Unix, os clientes podem se conectar usando
arquivos sockets.
•
A interface Connector/ODBC fornece ao MySQL suporte a programas clientes que usam
conexão ODBC (Open-DataBase-Connectivity). Por exemplo, você pode usar o MS
Access para conectar ao seu servidor MySQL. Os clientes podem ser executados no
Windows ou Unix. O fonte do Connector/ODBC está disponível. Todas as funções
ODBC são suportadas, assim como muitas outras.
- Localização:
•
O servidor pode apresentar mensagem de erros aos clientes em várias línguas.
•
Suporte total para vários conjuntos de caracteres, que incluem ISO-8859-1 (Latin1), big5,
ujis e mais. Por exemplo, os caracteres Escandinavos ‘â’, ‘ä’, ‘ö’ são permitidos em
nomes de tabelas e colunas.
•
Todos os dados são armazenados no conjunto de caracteres escolhido.
•
A ordenação é feita de acordo com o conjunto de caracteres escolhido (o modo sueco por
padrão). É possível alterar isso quando o servidor MySQL é iniciado. Pode-se ver um
exemplo de várias ordenações avançadas, procurando pelo código de ordenação Tcheca.
O Servidor MySQL suporta diversos conjuntos de caracteres que podem ser
especificados em tempo de compilação e execução.
- Clientes e Ferramentas:
•
O servidor MySQL foi construído com suporte para instruções SQL que verificam,
otimizam e reparam tabelas. Estas instruções estão disponíveis a partir da linha de
comando por meio do cliente myisamcheck, O MySQL inclui também o myisamchk, um
utilitário muito rápido para realizar estas operações em tabelas MyISAM.
•
Todos os programas MySQL podem ser chamados com as opções --help ou -? para obter
ajuda online.
44
2 DESCRIÇÃO
2.1 Introdução ao Tema do Projeto
Com base na bibliografia apresentada sobre a doença de Parkinson como o mais
importante tipo de tremor relacionado aos distúrbios do movimento, constatando a falta de um
exame para o diagnóstico deste tremor, assim como um breve estudo sobre acelerômetros, este
projeto tem a finalidade de elaborar um sistema que forneça um auxílio confiável ao médico
neurologista para diagnosticar e avaliar a DP, assim como outros tipos de patologias, tendo como
base a análise do tremor do paciente.
Este sistema computacional de auxílio ao diagnóstico de tremores visa gerar dados
coerentes de forma que o médico especialista (neurologista) decida com maior precisão o tipo de
tratamento, medicamento, fisioterapia, alimentação, etc., para fazer tratamento da enfermidade,
cruzando informações de tremores adquiridas pelo sistema no corpo do paciente com
informações fisiológicas, patológicas e do histórico do mesmo.
A idéia é que o neurologista faça um acompanhamento do paciente com o sistema no
próprio consultório médico, com o sistema fazendo a aquisição dos sinais referentes aos tremores
do paciente. Esses sinais serão enviados ao computador e comporão informações para auxiliar no
diagnóstico médico. Pode-se dizer que o princípio de utilização desse sistema é análogo ao dos
equipamentos que temos atualmente para eletrocardiograma e eletroencefalograma, por exemplo,
pois auxiliam no diagnóstico médico com base em informações coletadas do corpo do paciente
através de sensores.
O sensor utilizado pelo sistema é o acelerômetro, que é um sensor de vibração, variável
de acordo com o movimento de aceleração provocado no mesmo, conforme visto no estudo
teórico anteriormente apresentado.
O sistema possui um software de monitoração que é conectado um banco de dados onde
estarão guardadas as informações dos sinais adquiridos pelo sistema, juntamente com outras
informações pessoais e do histórico do paciente que, associadas, serão utilizadas para auxiliar no
diagnóstico.
2.2 Motivação do Desenvolvimento
Devido à falta de recursos, inclusive computacionais, para o auxílio a um diagnóstico
mais preciso de tipos de tremores, particularmente do Mal de Parkinson, foi percebida a
45
necessidade de desenvolver um sistema que possa ajudar a suprir esta necessidade, verificada
atualmente. Visto, também, que o diagnóstico depende muito da experiência do médico e com a
grande quantidade de médicos entrando no mercado de trabalho, é imprescindível um
equipamento que possa auxiliá-lo em sua profissão.
Apesar de já existirem métodos de alta tecnologia para tratamento de todos os tipos de
tremor, o diagnóstico ainda é bastante delicado, muitas vezes exigindo meses ou até um
amadurecimento da doença para o diagnóstico ser apresentado de forma confiável.
2.3 Situação do Projeto no Contexto Geral em que está Inserido
Equipamentos que usam como elemento sensor o acelerômetro são utilizados, em sua
maioria, em escala de medição industrial nas áreas de engenharia civil e engenharia mecânica
para avaliação de vibração em vigas, estruturas, máquinas, etc., de acordo com as pesquisas
realizadas. Alguns projetos estão começando a serem desenvolvidos utilizando acelerômetros
também na área da medicina e suas ramificações.
Muitos estudos vêm sendo desenvolvidos para buscar uma forma mais confiável de
diagnóstico das doenças que envolvem tremores, principalmente as parkinsonianas, como análise
da voz [UNIFESP], gravação de vídeos [Meneses e Teive, 1996] e acompanhamento com
medicamentos. Entretanto, nenhum método tem se mostrado suficientemente eficaz.
O sistema proposto é bastante interessante para o campo da medicina, principalmente
porque muitos neurologistas do Brasil desconhecem um sistema com a capacidade de auxiliar no
diagnóstico de patologias referentes aos tipos de tremores.
2.4 Análise de Cenário (Macro ambiente)
O projeto faz parte da área de equipamentos médicos como o eletroencefalograma (EEG)
e o eletrocardiograma (ECG), utilizados para diagnóstico e avaliação de doenças, os quais são
dispositivos adaptados ao corpo do paciente para adquirir sinais que apresentarão uma
informação visual para o médico que fará o diagnóstico do mal que está afetando o paciente.
Entretanto, a idéia do projeto é salvar as informações adquiridas pelo sistema num banco de
dados e compor um sistema mais especializado, que apresente dados consistentes para uma
perfeita avaliação e acompanhamento das enfermidades em questão.
46
No caso dos exames de EEG e ECG, a aquisição dos sinais é feita de modo a medir sinais
elétricos gerados pelo corpo que são analisados pelo médico em função de um sinal padrão préexistente.
No caso do projeto em questão, não haverá a aquisição de sinais elétricos do corpo, mas
será captada a vibração em pontos do corpo definidos pelo neurologista e esta vibração será
transformada em sinais elétricos através de sensores chamados acelerômetros. Estes sinais
elétricos são convertidos, então, para valores digitais, enviados ao computador e armazenados e
analisados pelo software do sistema.
Este equipamento poderá ser utilizados em consultórios médicos especializados, clínicas
especializadas e da mesma forma em hospitais, bastando ter um computador para conectar o
sistema, que fará a aquisição dos sinais, e executar o software que irá auxiliar no diagnóstico.
2.5 Metas a Serem Alcançadas
A meta principal a ser alcançada é o funcionamento completo do sistema de forma a
auxiliar no diagnóstico de maneira válida e que seja posteriormente reconhecida por órgãos de
saúde.
Os estudo feitos na área de abrangência deste projeto apresentam uma grande dificuldade
que vem de décadas de pesquisa para a consolidação de um exame laboratorial que forneça um
diagnóstico suficientemente confiável do tipo de tremor ou da patologia que o causou. Portanto
as expectativas são bastante promissoras e este projeto poderá ser um grande avanço na área de
pesquisa em que se encontra. A idéia é continuar com o desenvolvimento do sistema a fim de
futuramente poder consolidá-lo no mercado.
47
3 ESPECIFICAÇÃO TÉCNICA
Na especificação técnica é apresentada uma visão geral do sistema e uma prévia
descrição de cada módulo dos quais o projeto é composto.
A Figura 13 ilustra o sistema como um todo (a) e apresenta as partes do mesmo que
merecem destaque como os dois eixos espaciais de trabalho dos acelerômetros (b), que são os
sensores utilizados, e uma amostragem de sinais elétricos sobreposta à imagem de uma pessoa
idosa (b), pois as doenças relacionadas a tremores ocorrem, na maioria dos casos, em pessoas de
idade avançada.
(a)
(b)
(c)
Figura 13 – (a) Sistema (b) 2 eixos de trabalho dos acelerômetros (c) Sinais adquiridos
3.1 Aspectos Funcionais
O sistema fica interligado com cabos elétricos aos sensores fixados no paciente e este
deve ficar próximo ao computador para que a aquisição dos sinais seja feita em tempo real. Desta
forma, têm-se informações dos sinais pelo tempo que o paciente ficar ao lado do computador
para fazer a análise, o que já é suficiente para o acompanhamento e avaliação médica.
Figura 14 - Disposição dos acelerômetros
Três acelerômetros fazem a aquisição dos sinais. O sistema faz a coleta de dados no braço
do paciente, com sensores em dois dedos, o dedo indicador e o dedo médio, e um sensor
48
posicionado no tendão do antebraço, como mostrado na Figura 14 (vista do braço direito esticado
de um indivíduo de costas).
Estas posições são estratégicas, sugeridas por um neurologista experiente, de forma que
se possa melhor aproveitar os movimentos.
O software no computador faz o armazenamento dos sinais adquiridos em forma de
amplitude e freqüência em um banco de dados, juntamente com informações do histórico do
paciente, como doenças, traumas, raça, hereditariedade, etc.
A verificação da eficiência do sistema será contemplada com base na análise feita em
muitos pacientes, comparando-se níveis médios de freqüência e amplitude dos sinais adquiridos
com as outras informações dos pacientes e verificando semelhanças ou padrões entre eles, de
forma a comprovar a funcionalidade do sistema que irá auxiliar no diagnóstico médico e
avaliação do paciente.
3.2 Módulos do Sistema
Figura 15 – Visão geral do projeto
Dentre os módulos do sistema, o hardware é basicamente composto, na parte da
aquisição, por três acelerômetros que fazem a aquisição dos sinais referentes aos tremores, em
duas dimensões, posicionados em três pontos diferentes na mão e antebraço do paciente.
49
Amplificadores de instrumentação são utilizados para fazer a composição dos sinais X e Y em
apenas um sinal formado pela diferença entre eles. Filtros passa-baixa são utilizados para retirar
ruídos dos sinais, somadores para elevação do nível de referência dos sinais, um conversor
analógico / digital e um microcontrolador da arquitetura 8051 para fazer o gerenciamento da
comunicação dos dados com o computador.
O software é constituído basicamente por módulos de amostragem e armazenamento dos
dados adquiridos, além de módulos de cadastro de dados do paciente e de dados referentes à
avaliação clínica, módulo de histórico do paciente e módulo de emissão de receita ao paciente.
Observa-se uma visão geral do projeto na Figura 15.
50
3.3 Especificação do Hardware
3.3.1 Funções do Hardware
O hardware tem um comportamento totalmente autônomo, ou seja, não há nenhuma
função a ser configurada no mesmo. Toda configuração do sistema (não necessariamente pelo
usuário) é feita através do software no computador. O hardware tem como função fazer a
aquisição dos sinais de vibração e enviá-los ao computador.
3.3.2 Componentes utilizados
-
Acelerômetros ADXL 311 e ADXL203;
-
Amplificadores de Instrumentação INA128;
-
Filtros passa-baixa ativos TLC04;
-
Amplificadores Operacionais OP07;
-
Conversor analógico / digital ADC0808;
-
Latch 74LS373;
-
Microcontrolador 80C31;
-
Resistores, capacitores.
3.3.3 Diagrama em blocos com descrição
Acelerômetros
Amplificadores
de
Instrumentação
Filtros
Passa-Baixa
AOP
OP07
Controle
4 bits
x,y
Controle
2 bits
ADXL203
Kit
Microcontrolador
8031
TLC04
INA128
x,y
Conversor
ADC 0808
ADXL311
TLC04
x,y
computador
INA128
Dados
8 bits
ADXL311
INA128
Aquisição
Composição
do
Sinal
Dados
8 bits
TLC04
Filtragem
Somadores
do sinal com
+ 2,5V
Conversão
Analógico /
Digital
Porta
Paralela
Gerenciamento de
Comunicação
Comunicação com o computador
Figura 16 – Diagrama em blocos detalhado do hardware do sistema
51
- Aquisição: A aquisição do sinal de vibração é feita por acelerômetros modelo ADXL311 da
Analog Devices que possuem ±2g de range de medição [Analog, 2003b] instalados nos dedos do
paciente e por um acelerômetro modelo ADXL 203 da Analog Devices que possui ±1,5g de
range de medição [Analog, 2003a] instalado sobre a pele e posicionado na localização do nervo
do antebraço, na metade de sua extensão. Estes acelerômetros ficarão posicionados de forma a
medir a aceleração perpendicular ao movimento e mais uma direção complementar, como mostra
a Figura 17.
Figura 17 – Posicionamento dos acelerômetros
Os acelerômetros ficam dispostos de forma a medir a vibração em duas dimensões
espaciais X e Y.
A estrutura interna, que é praticamente a mesma para os dois acelerômetros escolhidos, é
mostrada na Figura 18. A única diferença é que no ADXL203 não há o resistor de BIAS.
Figura 18 – Estrutura interna dos acelerômetros ADXL311 e ADXL203 (adaptado de [Analog, 2003b])
- Composição: Para a composição dos sinais é utilizado o amplificador de instrumentação INA
128 [Burr-Brown, 2004], cujo o diagrama pode ser verificado na Figura 19. O ganho deste
amplificador de instrumentação é configurado através do resistor RG entre os pinos 1 e 8, através
da formula:
52
G = 1+
50kΩ
RG
(1)
Figura 19 – Estrutura interna do INA128 (adaptado de [Burr-Brown, 2004])
A composição dos sinais das duas direções X e Y em apenas um sinal é feita por este
amplificador de instrumentação configurado com ganho igual a 1, ou seja, como um buffer,
deixando passar apenas a diferença de tensão entre os sinais provenientes das saídas X e Y dos
acelerômetros. Este método é válido, pois sempre que houver um deslocamento mais acentuado
na direção X, o deslocamento na posição Y é pequeno, tendo-se assim, sempre um sinal de
amplitude significativa, composto pela diferença do deslocamento ocorrido nas duas direções. A
única característica peculiar deste processo a ser observada é que, quando o movimento das duas
direções tiver a mesma intensidade, a saída do sinal composto será de nível nulo.
- Filtragem: A filtragem é feita por filtros ativos, construídos internamente utilizando o princípio
de capacitores chaveados, modelo TLC04 da Texas Instruments, que são filtros passa-baixa
Butterworth de 4ª ordem. A estrutura interna deste filtro é apresentada na Figura 20 [BurrBrown, 1995]. A freqüência de corte do filtro será de 20 Hz.
Figura 20 – Estrutura interna do filtro TLC04 (adaptado de [Burr-Brown, 1995])
53
- Elevação da Referência: Como o sinal que vem dos filtros possui valores de amplitude
positivos e negativos, é necessário fazer uma elevação do nível de referência do sinal de 0V para
2,5V, pois o conversor A/D trabalha apenas com níveis de tensão positivos. Por isso é feita uma
soma do sinal que vem dos filtros com +2,5V utilizando amplificador operacional (AOP) em
configuração somador. O AOP utilizado é o OP07 [Texas, 2002], que pode ser visto na Figura 21.
Figura 21 – Amplificador Operacional OP07 (adaptado de [Texas, 2002])
- Conversão Analógico / Digital: A conversão analógico / digital é feita pelo circuito integrado
ADC0808 [National, 1997] que possui 8 bits de resolução e 8 entradas analógicas, mas são
usadas apenas 3 entradas, endereçadas pelo microcontrolador de forma a fazer a aquisição dos
sinais para o processamento. A estrutura interna deste conversor A/D é apresentada na Figura 22.
Figura 22 – Estrutura interna do ADC0808 (adaptado de [National, 1997])
54
- Gerenciamento da Comunicação: O gerenciamento da comunicação, do sistema com o
computador, é feito pelo microcontrolador 80C31 [Intel, 1995] que possui a arquitetura 8051,
não possui memória de programa interna e a memória de dados é restrita aos registradores
internos. Portanto é utilizado um kit, composto por: microcontrolador 8031, memória EPROM e
memória RAM. O microcontrolador faz a aquisição dos três sinais referentes à medição dos
acelerômetros, definindo a taxa de amostragem dos sinais através do controle do tempo de
conversão do ADC, atuando nos pinos de início de conversão (start), habilitação de endereço
(address latch enable) e término de conversão (end of conversion), assim como, envia os dados
ao software no computador informando qual canal (referente ao sensor) está selecionado para a
correta apresentação do sinal na tela e gravação do mesmo no bando de dados. Desta forma o
software faz a amostragem dos sinais dos três acelerômetros e de um quarto sinal, que é a soma
dos três, ao mesmo tempo. Contudo, o microcontrolador garante que cada amostra convertida
pelo ADC tem o seu valor armazenado e é apresentada no software. Então, nenhuma informação
será perdida, todos os valores convertidos pelo ADC, na taxa de amostragem gerenciada pelo
microcontrolador, são guardados no banco de dados do software no computador e utilizados para
análise.
- Comunicação com o Computador: a comunicação com o computador é feita através da porta
paralela trabalhando com 8 bits de dados, que é o máximo que esta porta de comunicação
suporta, e configurada em modo EPP. São usados os 8 pinos de dados e dois pinos de controle
para receber o endereçamento dos dados enviados pelo microcontrolador. Dependendo do
sistema operacional utilizado, é necessário instalar um driver para que o software faça o acesso à
porta paralela do computador. Em Windows NT, 2000, XP e versões mais atuais é necessário
instalar este driver.
55
3.3.4 Ambiente de desenvolvimento
O ambiente utilizado para a programação do microcontrolador 8031, em linguagem
Assembly, é o software Rigel Reads51.
Para o desenho do diagrama esquemático do circuito é utilizado o Software Orcad
Capture e para o desenvolvimento da placa de circuito impresso o software Orcad Layout.
56
3.4 Especificação do Software
3.4.1 Linguagem e ferramenta de desenvolvimento
A linguagem de programação escolhida para o desenvolvimento do software é a
linguagem C++, utilizando o Borland C++ Builder 5 como ambiente de programação e criação
da interface gráfica para interação do usuário com o sistema.
O banco de dados utilizado para armazenamento de dados é a base do MySQL Server.
3.4.2 Interface com o usuário
A interface do sistema com o usuário é feita através do software no computador,
desenvolvido para ambiente gráfico rodando no sistema operacional Microsoft Windows.
3.4.3 Fluxograma com descrição
As funções que o software possui, inicialmente, são:
-
Visualização da medida de vibração em tempo real do sinal composto (pelos eixos X e
Y), proveniente dos três sensores e mais um sinal que é a soma dos três primeiros;
-
Visualização do valor de freqüência do sinal adquirido;
-
Visualização do valor médio de amplitude do sinal adquirido;
-
Campos para preenchimento da avaliação clínica do paciente;
-
Cadastramento de paciente, médico, tremor e remédio;
-
Visualização de histórico do paciente;
-
Emissão de receita médica.
O fluxograma do software é apresentado na Figura 23.
57
Figura 23 – Fluxograma do software
58
3.5 Estimativa de Investimento
Levando em conta os componentes utilizados e a quantidade de horas de trabalho, é
apresentada na Tabela 5 a estimativa de investimento/custos deste projeto para a produção de
uma unidade do sistema. Não estão sendo considerados os custos de utilização dos equipamentos
necessários a testes do circuito eletrônico como osciloscópio, fonte, gerador de funções, etc. e
dos softwares utilizados, que estão disponíveis para utilização nos laboratórios do curso de
Engenharia da Computação do UnicenP, pois a compra desse ferramental encareceria
substancialmente o projeto e não foi conseguido ainda dados de custo de aluguel dessas
ferramentas. Também não estão sendo contados os custos de componentes eletrônicos como
resistores, capacitores, conectores, etc.
Tabela 5- Estimativa de custos
Recurso
Quantidade
Custo Unit.(R$)
Custo (R$)
Acelerômetro ADXL203
1
44,25
44,25
Acelerômetro ADXL311
2
15,04
30,09
INA 128
3
9,82
29,46
Filtro TLC04
3
3,38
10,14
Amp Operacional OP 07
3
1,44
4,34
Porta not 74LS04
1
0,70
0,70
Divisor 74LS393
1
1,64
1,64
Latch 74LS373
2
1,12
2,24
EPROM 27C256
1
7,00
7,00
Cristal 12MHz
1
2,00
2,00
Cristal 4 MHz
1
2,00
2,00
Conversor ADC0808
1
26,95
26,95
Microcontrolador 80C31
1
8,30
8,30
660
7,50
4.950,00
Horas de trabalho
Total
5.119,11
59
3.6 Especificação de Validação do Projeto
O projeto foi validado mediante a testes do sistema com pacientes reais do Ambulatório
de Distúrbios do Movimento do Serviço de Neurologia do Hospital de Clínicas da UFPR sob
supervisão do médico neurologista Dr. Edison Novak e orientação do professor José Carlos da
Cunha.
Os testes foram feitos com pacientes que já possuem uma doença conhecida, para saber
qual é o padrão de sinal referente àquela doença.
Um protocolo de avaliação de tremores, já utilizado pelos neurologistas, foi utilizado para
análise dos pacientes, só que com o sistema acoplado aos mesmos.
Tendo as informações armazenadas no banco de dados com os padrões de cada tipo de
doença, foi feita uma análise comparando os valores apresentados pelo sistema com valores
teoricamente esperados. Foram comprovadas a veracidade dos dados e sua consistência para o
auxílio ao diagnóstico, de modo a validar o projeto, tendo como avaliador o Dr. Edison Novak,
neurologista com experiência e conhecimentos amplos adquiridos desde os anos 70 e 80,
portanto, um profissional capacitado a dizer se o sistema pode ser válido ou não.
60
4 PROJETO
Na fase de projeto são apresentados todos os módulos de hardware e software, como
foram projetados e da forma que são utilizados para a implementação.
4.1 Hardware
4.1.1 Aquisição
A aquisição dos sinais de tremor é feita pelos acelerômetros.
Os acelerômetros que vão aos dedos do paciente são os modelos ADXL311 que possuem
maior escala de medida de aceleração, pois sofrerão uma movimentação maior. Estes
acelerômetros possuem ±2g (2 x 9,81m/s2) de escala máxima de medição.
Na Figura 24 é apresentado o diagrama do acelerômetro que irá fixado aos dedos do
paciente.
Figura 24 – Diagrama do acelerômetro de 2g
O resistor Rbias garante um funcionamento correto do componente, minimizando ruídos
eletrônicos que desestabilizam o nível de saída zero quando o acelerômetro está em repouso. É
aconselhado no datasheet do ADXL311 o uso de um resistor de valor entre 50kΩ a 2MΩ.
Um capacitor deve ser colocado em cada saída X e Y para garantir a redução de ruídos e
para fazer uma filtragem antialiasing (sinais de sombra que parecem existir quando a freqüência
de amostragem não é suficientemente grande). Para calcular o valor deste capacitor é utilizado o
cálculo padrão de freqüência de corte para largura de banda de 3dB:
61
f =
1
(1)
2.π .R.C
O datasheet apresenta como resistor interno, para uso no cálculo, um valor de 32kΩ. O
sistema irá medir freqüências entre 1Hz e 30Hz, concentrando-se mais em baixas freqüências.
Mas, para compreender esta faixa de freqüências, considerando que o filtro é de 4ª ordem, pode
se utilizar 20Hz. Então, aplicando na equação (2) para encontrar o valor do capacitor teremos:
C=
1
= 0,24µF ⇒ 220ηF
2.3,14.32k .10
(2)
O acelerômetro que vai fixado ao antebraço sofre menores vibrações, portanto é utilizado
o modelo ADXL203 que possui ±1,5g de escala máxima de medição, o que oferece uma melhor
sensibilidade. Na Figura 25 é apresentado o diagrama do acelerômetro que vai fixado ao
antebraço do paciente.
Figura 25 – Diagrama do acelerômetro de 1,5g
Observa-se que neste acelerômetro não existe um resistor Rbias, pois não é necessário.
Este acelerômetro é construído com novas técnicas que garantem uma grande estabilidade em
0g. O cálculo dos capacitores ligados às saídas X e Y é o mesmo do acelerômetro ADXL311.
62
4.1.2 Composição
A composição dos sinais provenientes das saídas X e Y de cada acelerômetro é feita
através dos amplificadores de instrumentação INA 128, configurados para ganho unitário,
portanto, sem resistor Rg entre os pinos 1 e 8. Um capacitor é acoplado à saída para retirar
qualquer nível DC que possa haver. A Figura 26 apresenta o diagrama desta etapa do circuito.
Figura 26 – Diagrama do amplificador de instrumentação INA 128
4.1.3 Filtragem
A filtragem dos sinais provenientes dos amplificadores de instrumentação é feita através
dos circuitos integrados TLC04, que são filtros passa-baixa de 4ª ordem. A freqüência de corte
utilizada para o cálculo desses filtros é de 20Hz. A Figura 27 apresenta o diagrama deste filtro.
Figura 27 – Diagrama do filtro passa-baixa de 20 Hz
Estes filtros utilizam internamente a técnica de capacitores chaveados, já apresentada na
introdução teórica.
A freqüência de corte deste filtro é conseguida aplicando-se uma freqüência de oscilação
externa 50 vezes maior. Portanto, para se ter uma freqüência de corte de 20Hz, deve-se projetar
um oscilador RC de 50x20 = 1000Hz. A equação para o cálculo do circuito oscilador RC
apresentada pelo datasheet do TLC04 é:
63
f clock =
1
1,69.R.C
(3)
Arbitrando-se um valor de 470ηF e utilizando o valor de 1000Hz para a freqüência,
calcula-se o valor do resistor:
R=
1
= 1258Ω ≅ 1,2kΩ
1,69.1000.470η
(4)
4.1.4 Elevação da Referência
É feita uma elevação da referência do sinal para 2,5V para trabalhar com os sinais
somente em valor positivo, devido ao conversor analógico/digital só interpretar valores positivos
de 0V a 5V. Isto é feito com o amplificador operacional OP07 configurado como somador nãoinversor.
A Figura 28 apresenta o diagrama deste somador.
Figura 28 – Diagrama do circuito elevador do nível de referência
Foram feitos os cálculos para esta etapa do circuito, mas na prática os resultados não
foram os esperados de acordo com os cálculos realizados. Então foram feitos testes variando os
valores dos resistores que definem o ganho e os resistores que fazem o somatório do sinal de
entrada com um nível DC, de modo a se chegar num sinal de saída com amplitude igual ao sinal
de entrada acrescido de 2,5 de nível DC. Desta forma foram obtidos os valores de resistores, para
a configuração do somador utilizando o amplificador operacional OP07, de forma experimental.
Provavelmente esta diferença entre teoria e prática se deve à impedância do sinal de entrada.
64
4.1.5 Conversão A/D
A conversão A/D é feita pelo circuito integrado ADC0808 recebendo como entrada os
sinais compostos dos 3 acelerômetros e tendo em sua saída o sinal digital de 8 bits, selecionada
por endereçamento a partir do microcontrolador 8051.
Figura 29 – Diagrama do conversor analógico / digital
65
O ADC0808 necessita de um sinal de clock para seu correto funcionamento sendo,
portanto, necessária a inclusão ao projeto de um circuito gerador de clock , implementado com
um cristal, portas NOT e resistores, pode ser visto no diagrama do conversor A/D na Figura 29.
Como está sendo utilizado um cristal de 4MHz, foi implementado um divisor de freqüência
utilizando o circuito integrado 74LS393 dividindo a freqüência por 8 e obtendo-se uma
freqüência de entrada para o conversor A/D de 500KHz, que é uma freqüência dentro da faixa de
funcionamento especificada para este circuito integrado.
O pino OE (Output Enable – Habilitação da saída) é ligado ao GND para manter as
saídas sempre habilitadas. O pino ALE (Address Latch Enable – Carga do dado endereçado) é
ligado ao pino START (início de conversão) conforme é apresentado no datasheet do
componente e é controlado pelo 8031. O pino EOC (End of Conversion – Término de
Conversão) é controlado e sincronizado com o sinal de START através do microcontrolador
8031. Os pinos de saída de dados são ligados a um latch que possui suas saídas habilitadas
apenas quando o microcontrolador 8031 habilita o endereço de leitura dos dados do conversor
A/D através do barramento de dados do kit do 8031. Foi tentado controlador o conversor A/D
pelo seu próprio pino de output enable (OE), mas ocorreram alguns problemas. Utilizando o
circuito integrado 74LS373 o controle de carga dos dados funcionou corretamente.
4.1.6 Gerenciamento da Comunicação
O gerenciamento da comunicação entre o sistema e o computador é feito pelo
microcontrolador 8031, que executa um algoritmo de gerenciamento dos sinais para transmissão
ao microcomputador. É utilizada uma placa de circuito impresso que forma um kit contendo o
microcontrolador, uma memória EPROM (para gravação do programa) e uma memória RAM
(para manipulação de dados), além de interfaces de entrada / saída como a porta P1, barramento
de dados, barramento de endereços e conexão serial.
Como se estima que os sinais de tremor a serem amostrados não irão passar de 30Hz e
será feita uma amostragem de três sinais praticamente ao mesmo tempo, então se tem 90Hz, ou
seja, 90 amostras em 1 segundo. Como a freqüência de amostragem de um sinal deve ser pelo
menos o dobro da freqüência do mesmo, então o valor mínimo da freqüência de amostragem
deve ser de 180Hz. A aquisição é feita com a duração de 1 minuto, ou seja, 60 segundos, e para
resolver uma FFT deve-se ter um número de amostras de 2n. Se for escolhido 213 = 8.192
amostras, tem-se 8.192/60 = 136,5 amostras por segundo que é menos que a freqüência de
amostragem desejada. Então, pegando 214=16.384 amostras tem-se 16.384/60 = 273,06 amostras
66
por segundo, o que satisfaz a necessidade. Para garantir que pequenos erros de transmissão não
interfiram na quantidade de amostras, a taxa de 276Hz foi utilizada.
Com base nesse valor estipulado, as amostragens feitas pelo conversor A/D devem ser
feitas a cada 1/276 segundos, ou seja, a cada 3,62 mili segundos. O tempo de conversão do ADC
trabalhando a 500KHz é de 140ηs.
O microcontrolador utiliza a porta P3 para controle do conversor A/D. Então, a cada 3,62
mili segundos microcontrolador seleciona um canal do ADC (P3.2 e P3.3), habilita a conversão
do ADC (P3.4) setando o pino de start, espera que o bit de end of conversion do ADC seja
setado (que demora 140ηs), monitorando o bit P3.5, recebe o valor pelo barramento de dados,
endereçando o latch (que contém os dados do conversor A/D) pelo bit A15 do barramento de
endereços, envia este mesmo valor
para o computador pela porta P1 (cada instrução do
microcontrolador funcionando a 12MHz dura 1µs) e aciona um contador que demora o tempo
restante para completar os 3,62ms da taxa de amostragem. E então seleciona o canal do próximo
sensor e repete todo o processo. O fluxograma deste procedimento é apresentado na Figura 30.
Figura 30 – Fluxograma do algoritmo executado no 8031
67
Este processo realizado pelo microcontrolador possibilita a medição da freqüência do
sinal, realizada no software, através de um algoritmo de transformada rápida de Fourier,
utilizando a taxa de amostragem especificada.
4.1.7 Comunicação com o Computador
A comunicação com o computador é feita através da porta paralela que recebe os dados
enviados pelo microcontrolador 8051 para os pinos 2 a 8 e este faz também a seleção de qual dos
sinais dos acelerômetros está sendo enviado, informando o endereço selecionado para os pinos
de controle de status 15 (Error – menos significativo) e 13 (Slct out – mais significativo) da
porta paralela. Dessa forma, o microcontrolador envia os dados na taxa de amostragem
especificada e a porta paralela é sincronizada, através da monitoração dos pinos de
endereçamento, e faz o armazenamento dos dados e amostra em localização apropriada para cada
sensor na tela do software.
4.1.8 Esquemático Completo do Hardware
Os esquemáticos completos do hardware do projeto são apresentados na Figura 26, que
mostra o diagrama do sistema de aquisição e na Figura 27, que mostra o diagrama do kit 8031 já
com as conexões especificadas para adaptação ao sistema de aquisição.
68
Figura 31 - Diagrama esquemático do circuito de aquisição
69
Figura 32 - Diagrama esquemático do kit 8031
70
4.2 Software
O projeto do software foi feito pensando na programação em três camadas (Interface,
Negócio e Banco de Dados), sendo que agora serão apresentados os diagramas que servem como
base para a implementação do software.
4.2.1 Casos de Uso
Nos casos de uso definem-se os atores e as interações, mas neste projeto tem-se apenas
um ator que é o médico e suas interações com o sistema, como visto na Figura 33.
Figura 33 – Casos de uso do software
71
4.2.2 Diagrama de Classes
O diagrama de classes apresenta elementos conectados pelos seus relacionamentos
estáticos. O diagrama de classes do software é mostrado na Figura 34.
Figura 34 – Diagrama de classes do software
72
4.2.3 Diagramas de Seqüência e Diagramas de Estados
Os diagramas de seqüência apresentam interações em uma seqüência de tempo.
Apresentam os objetos participando e interagindo em suas linhas de vida, trocando mensagens de
modo a se chegar em um resultado ou operação. Não apresentam as associações entre os objetos.
Os diagramas de estados apresentam a resposta de um objeto de uma classe a partir de um
estímulo externo. Representam uma máquina de estados.
Na Figura 35 são apresentados o diagrama de seqüência e o diagrama de estados do
cadastro do paciente. O mesmo esquema é utilizado para os cadastros do médico, do tremor e do
remédio, mudando-se apenas os nomes das classes e métodos.
[Não Cadastrado]
Cadastro do Paciente
::Paciente
[Novo Paciente]
Ativo
Cadastrar
Médico
NovoPaciente()
SetPaciente()
[Cadastrado]
(a )
(b)
Figura 35 – (a) Diagrama de seqüência e (b) diagrama de estados do cadastro do paciente
73
Na Figura 36 são apresentados os diagramas para a avaliação do paciente.
Avaliação
::Avaliacao
::Historico
::Paciente
::Tratamento
Médico
NovaAvaliacao()
GetPaciente()
AvaliacaoSimples()
GetHistorico()
NovoTratamento()
EmitirReceita()
[Avaliação Iniciada]
Registrando Avaliação
Emitir Receita
[Avaliação Simples do Paciente]
[Avaliação Pronta]
Avaliação Simples
Figura 36 – Diagramas de seqüência e estados para a avaliação do paciente
[Avaliação Efetuada]
74
Na Figura 37 são apresentados os diagramas para a avaliação monitorada do paciente.
Avaliação Monitorada
::Avaliacao
::Diagnostico
::Paciente
::Tratamento
::Monitoracao
Médico
NovaAvaliacao()
GetPaciente()
AvaliacaoMonitorada()
NovaMonitoracao()
NovoTratamento()
EmitirReceita()
[Nova Avaliação]
[Avaliação Efetuada]
Registrando Avaliação
Emitir Receita
[Avaliação Monitorada do Paciente]
[Avaliação Pronta]
Monitoração do Paciente
Figura 37 – Diagramas de seqüência e estados para a avaliação monitorada do paciente
75
4.2.4 Interface
A interface define toda e qualquer interação do usuário com o sistema. A seguir são
apresentadas as principais interfaces do software projetado.
A interface da tela de avaliação que, inclusive, é a tela inicial do software é mostrada na
Figura 38. Primeiro escolhe-se o médico e o paciente, então, clica-se em “Iniciar Avaliação” para
que o resto dos campos seja habilitado e o processo de avaliação do paciente possa ocorrer. Ao
terminar a avaliação deve-se clicar em “Concluir e Salvar Avaliação” para que os dados da
avaliação sejam gravados.
Figura 38 – Tela de avaliação
76
Ao clicar em monitorar aparece a tela de visualização do gráfico da aquisição dos sinais
dos três sensores e dos valores de amplitude e freqüência, vista na Figura 39. Ao iniciar a
monitoração ocorre todo o procedimento de comunicação com o hardware do sistema,
amostrando os sinais dos sensores nos gráficos correspondentes, apresentando suas amplitudes
médias e executando o algoritmo de FFT para apresentar a freqüência dos sinais. Para comprovar
o funcionamento deste algoritmo, na fase de testes da integração do hardware com o software,
foi utilizado um gerador de funções fornecendo uma onda senoidal nas entradas dos sensores
(acelerômetros). Assim foi possível verificar que o valor de freqüência apresentado no software é
o mesmo da freqüência fornecida pelo gerador.
No final da monitoração, marca-se qual tipo de tremor foi analisado, se necessário
escreve-se alguma observação e se tudo estiver correto clica-se em “Gravar e Voltar” para que se
possa iniciar uma nova monitoração a partir da tela de avaliação.
Figura 39 – Tela de monitoração
77
A tela de cadastro do paciente é mostrada na Figura 40.
Figura 40 – Tela de cadastro do paciente
A tela de cadastro do médico é mostrada na Figura 41.
Figura 41 – Tela de cadastro do médico
78
A tela de cadastro do tremor é apresentada na Figura 42.
Figura 42 – Tela de cadastro do tremor
A tela de cadastro do remédio é apresentada na Figura 43.
Figura 43 – Tela de cadastro do remédio
79
A tela de emissão de receita, que possui a inclusão do(s) tratamento(s) é mostrada na
Figura 44. Tratamento significa a indicação de um remédio, sua posologia e período para
utilização.
Figura 44 – Tela de emissão de receita
Figura 45 – Tela de histórico do paciente
80
A tela de histórico do paciente é mostrada na Figura 45. Aparecem todas as avaliações
feitas pelo paciente e ao selecionar uma avaliação aparecem embaixo as monitorações feitas
naquela avaliação. É possível também ver os gráficos das monitorações, clicando na monitoração
desejada. A Figura 46 mostra uma monitoração do histórico de um paciente.
Figura 46- Tela do histórico da monitoração do tremor do paciente
81
4.2.5 Banco de Dados
O banco de dados utilizado é o MySQL. Ele usa um conector ODBC para instanciar a
base de dados que deve ser configurado no DNS de sistema no ODBC do Windows. Deve ser
configurado um alias no BDE da Borland para que o banco seja acessado pelo software que é
implementado no ambiente Borland C++ Builder.
As tabelas seguem, basicamente, a estrutura do diagrama de classes apresentado
anteriormente, cada classe corresponde à uma tabela na base de dados. O acesso à base de dados
tanto para gravação como para consulta é feita através de uma camada de código chamada
broker. A Figura 47 apresenta o software de gerenciamento do banco de dados MySQL.
Figura 47 – Software de gerenciamento do banco de dados MySQL
82
5 RESULTADOS
O sistema ficou em testes por um mês no Hospital de Clínicas de Curitiba e contou com
13 pacientes que foram submetidos aos testes com o acompanhamento de um especialista da
área.
Foi utilizado um protocolo de testes padrão já utilizado pelos médicos, para análise por
observação, mas agora com o paciente tendo os sensores fixados ao seu corpo. Cada teste tem a
duração de um minuto e são analisados os seguintes tremores: de repouso, postural e cinético.
O sistema também foi utilizado com pessoas normais realizando os mesmos testes feitos
com os pacientes para comprovar a sua eficiência.
A utilização do sistema com pacientes que possuem a doença já conhecida, foi feita com
o propósito de gerar um banco de dados que possa, com a aquisição de muito mais dados,
compor uma base que forneça subsídios para se implementar futuramente um algoritmo de
reconhecimento de padrões de forma que o sistema possa sozinho fornecer um diagnóstico
baseado nas informações do tremor e do histórico do paciente.
A Tabela 6 apresenta os diagnósticos dos pacientes que contribuíram com os testes do
sistema.
Tabela 6- Diagnósticos dos pacientes analisados
Nome Idade Sexo
ARS
74
F
CF
61
F
FBF
55
F
GAFM
43
IB
Diagnóstico
Braço
Parkinson
Direito
Tremor de
Tremor Tremor Tremor
Maior
Repouso Postural Cinético Amplitude
(Hz)
(Hz)
(Hz)
(V)
4,663
4,211
7,446
0,250
Direito
3,470
3,504
3,992
0,765
Parkinsonismo
Direito
6,368
6,738
8,642
0,212
M
Parkinsonismo
Direito
8,676
8,372
9,855
0,156
73
F
Parkinson
Direito
6,974
7,244
0,303
0,107
JFF
64
M
Parkinson
Esquerdo
5,188
5,744
6,098
0,345
JRC
72
F
Parkinson
Direito
7,850
4,211
7,143
0,195
LNG
58
F
Parkinson
Direito
5,963
5,862
7,833
0,175
LBJ
47
M
Parkinsonismo
Direito
6,974
6,502
7,597
0,283
MFM
77
F
Parkinson
Direito
7,345
5,525
0,286
0,134
MPA
67
M
Parkinson
Direito
6,283
6,688
7,345
1,076
RAS
65
M
Parkinsonismo
Direito
6,637
8,574
8,086
0,154
ZV
80
F
Essencial
Direito
7,345
5,222
5,980
0,293
Holmes
83
O primeiro teste realizado é o teste de tremor em repouso, com o braço e a mão apoiados
na mesa por 1 minuto, como mostra a Figura 48.
Figura 48- Teste de tremor de repouso
O segundo teste é do tremor postural, em que o paciente fica com os braços levantados,
também por 1 minuto, como mostra a Figura 49.
Figura 49- Teste de tremor postural
O terceiro teste é do tremor cinético, realizado com o paciente fazendo um movimento
apontando com o dedo indicador para o seu próprio nariz e para o dedo do médico, por 1 minuto,
conforme mostra a Figura 50.
Figura 50- Teste de tremor cinético
84
O sistema mostrou resultados, conforme a teoria, podendo-se verificar no espectro de
freqüências dos sinais dos pacientes com doença de Parkinson que a predominância fica na
média de 4 a 6 Hz. O tempo de 1 minuto foi verificado pelos profissionais de neurologia
experimentalmente como suficiente e ideal para a aquisição dos dados.
Pegando, como exemplo, o paciente JFF, a Figura 51 apresenta o sinal de amplitude em
função do tempo, a Figura 52 apresenta o gráfico do espectro de freqüências no software e a
Figura 53 o mesmo espectro gerado no Matlab. Observa-se a predominância em torno das
freqüências de 5Hz a 6Hz.
Figura 51- Sinal de amplitude
Figura 52- Espectro de freqüências no software
Figura 53- Espectro de freqüências no Matlab
Analisando uma pessoa normal, o sistema apresenta os gráficos praticamente nulos, ou
seja, não há amplitude nem uma freqüência predominante, pois não há tremor, como visto na
Figura 54 e na Figura 55.
85
Figura 54- Sinal de amplitude de um paciente sem tremor
Figura 55- Espectro de freqüências de um paciente sem tremor
86
6 CONCLUSÃO
O sistema demonstrou-se eficaz para o acompanhamento clínico de pacientes com doença
de tremor. É claro que um banco de dados bem maior deve ser gerado e isto irá acontecendo
conforme o sistema for sendo utilizado.
Não foi adotado nenhum procedimento padrão para os testes iniciais, ou seja, alguns
pacientes estavam tomando remédio e outros não tinham tomado no dia do teste. A diversidade
de medicações é grande e, devido a pouca quantidade de pacientes analisados ficou difícil fazer
alguma análise em questão de eficácia dos remédios, mesmo porque os pacientes não foram
avaliados sem medicação. Também foi feita a medição de cada tipo de tremor apenas uma vez. O
ideal seria ter, pelo menos, duas medições de cada paciente para comparação dos resultados.
Contudo, o sistema demonstrou-se eficaz para a avaliação dos tremores, fornecendo resultados
quantitativos para auxiliar o médico.
É questionada pelos médicos a posição dos sensores, se é a melhor posição a se analisar o
tremor. Mas nenhum estudo até hoje comprova um método para ser utilizado com este propósito.
Então a idéia é adotar estas posições como padrões e seguir um protocolo de avaliação para que
os dados adquiridos sejam bem fundamentados e continuar com pesquisas em cima do sistema
para fomentar, se possível, uma consolidação do equipamento como um produto.
A proposta para continuidade do trabalho é fazer o processamento desses sinais de tremor
armazenados, utilizando métodos, de aplicabilidade a ser verificada, como métodos estatísticos,
redes neurais, reconhecimento de padrões e/ou outros, de modo que o sistema possa, sozinho,
fornecer um diagnóstico baseado nas informações do tremor e do histórico do paciente.
87
7 REFERÊNCIAS BIBLIOGRÁFICAS
[Analog, 2003a] ADXL103/203 Low Cost ±1.5g Single/Dual Axis Accelerometer. Norwood,
MA. USA, 2003. Preliminary Technical Data. Disponível em http://www.analog.com,
acessado em Março / 2004.
[Analog, 2003b] ADXL311 Low Cost, Ultracompact ±2g Dual Axis Accelerometer. Norwood,
MA. USA, 2003. Datasheet. Disponível em http://www.analog.com, acessado em Março /
2004.
[Boylestad, 1998] BOYLESTAD, R.L. et al. Dispositivos Eletrônicos e Teoria de Circuitos. Rio
de Janeiro: Editora Prentice Hall Ltda, 1998.
[Budzinski, 1999] BUDZINSKI, João Augusto Scheid. Acelerômetros. Trabalho para a
disciplina de Instrumentação Eletrônica. UFPR. Curitiba, 1999. Disponível em
http://www.eletrica.ufpr.br/edu/ie99/trab2/joao/index.htm, acessado em Março / 2004.
[Burr-Brown, 1995] TLC04 Butterworth Fourth-Order Low-Pass Switched Capacitor Filters
Datasheet. Dallas, Texas. USA, 1995. Datasheet. Disponível em http://www.burrbrown.com, acessado em Março / 2004.
[Burr-Brown, 2004] INA 128 INA 129 Precision, Low Power Instrumentation Amplifiers
Datasheet. Dallas, Texas. USA, 2004. Datasheet. Disponível em http://www.burrbrown.com, acessado em Julho / 2004.
[Cañive, 2001] CAÑIVE, Jorge Morales. Filtros a Capacitores Chaveados CMOS Testáveis e de
Baixa Sensibilidade. Tese – Universidade Federal do Rio de Janeiro. Rio de Janeiro, 2001.
Disponível em www.pads.ufrj.br/docs/jorge_doctoratethesis.pdf, acessado em Abril / 2004.
[Curotto, 2003] CUROTTO, Cláudio Luiz. Integração de Recursos de Data Mining com
Gerenciadores de Banco de Dados Relacionais. Universidade Federal do Rio de Janeiro.
Rio de Janeiro, 2003. Disponível em
http://www.coc.ufrj.br/teses/doutorado/inter/2003/teses/CUROTTO_CL_03_t_D_int.pdf,
acessado em Abril / 2004.
[DCN Merck] Manual Merck Saúde para a Família. Seção – Distúrbios do Cérebro e dos Nervos.
Capítulo 67 – Distúrbios do Movimento. Disponível em
http://www.msd-brazil.com/msd43/m_manual/mm_sec6_67.htm, acessado em Março /
2003.
[DFT Scielo] MATTOS, James Pitágoras de. Diagnóstico Diferencial dos Tremores. Arquivos
de Neuro-Psiquiatria. Junho 1998, vol.56, no.2, p.320-323. Disponível em
http://www.scielo.br/scielo.php?script=sci_arttext&pid=S0004282X1998000200027&lng=en&nrm=isso, acessado em Março / 2004.
88
[Doscher, 2004] DOSCHER, James. Using iMEMS Accelerometers in Instrumentation
Applications. MEMS Technology. Analog Devices. ADXL202 Technical Library.
Disponível em http://www.analog.com, acessado em Março / 2004.
[eMedix] Medix – Doenças e Prevenção – Doneça de Parkinson – Descrição. Disponível em
http://www.emedix.com.br/artigos/neu005_1g_parkinson.shtml, acessado em Maio/2003.
[Equipe UNC] Unineuro - Unidade de Neurologia Clínica. Problemas Neurológicos Comuns.
Texto 16 - As causas da doença de Parkinson e Texto 17 - Parkinsonismo e a Doença de
Parkinson. Disponível em http://www.unineuro.com.br/doencas.html, acessado em Março /
2003.
[Ferlin, 2000] FERLIN, Edson Pedro. Microcontrodadores Família 8031 / 8051. Curitiba, 2000.
Disponível em http://pagina.de/ferlin, acessado em Março / 2004.
[George e Chu, 2000] GEORGE, Alan.; CHU, Eleanor. Inside the FFT Black Box – Serial and
Parallel Fast Fourier Transform Algorithms. University of Ontario. Canada, 2000.
[Intel, 1995] 80C31 MCS51 CHMOS Single Chip 8 Bit Microcontroler Datasheet. Intel
Corporation, 1995. Disponível em http://www.intel.com, acessado em Março / 2004.
[Lima, 2004] LIMA, Manoel Eusébio de. FFT. PCT - Centro de Informática – UFPE. Disponível
em www.cin.ufpe.br/~mel/curso_pct/aulas/aula11.PDF, acessado em Julho / 2004.
[MEMS] MEMS and Nanotechnology Clearinghouse. What is MEMS Technology? Disponível
em http://www.memsnet.org/mems/what-is.html, acessado em Março / 2004.
[Meneses e Teive, 1996] MENESES, Murilo S.; TEIVE, Hélio Afonso G. Doença de Parkinson
– Aspectos Clínicos e Cirúrgicos. Editora Guanabara Koogan: Rio de Janeiro, 1996.
[MySQL, 2003] MySQL Technical Reference for Version 5.0.0-alpha. Versão em Português.
MySQL AB, 2003. Disponível em http://dev.mysql.com/get/Downloads/Manual/manuala4.pt.pdf/from/pick, acessado em Maio / 2004.
[National, 1997] ADC0808/ADC0809 8 Bit µP Compatible A/D Converters with 8 Channel
Multiplexer.
National
Semiconductor
Corporation,
1997.
Disponível
em
http://www.national.com, acessado em Abril / 2004.
[Neto, 2000] NETO, Emilio Hoffmann Gomes. Transdutores de Pressão de Silício. Trabalho
para a disciplina de Instrumentação Eletrônica. UFPR. Curitiba, 2000. Disponível em
http://www.eletrica.ufpr.br/edu/ie00/transd/emilio, acessado em Março / 2004.
[Pereira, 2000] PEREIRA, Jacqueline Silva. Teoria e Implementação Prática de Filtros a
Capacitores Chaveados na Forma Direta. Tese – Universidade Federal do Rio de Janeiro.
Rio de Janeiro, 2000. Disponível em http://www.pads.ufrj.br/docs/jac_mastersthesis.pdf,
acessado em Abril / 2004.
89
[Rosenberg, 2000] ROSENBERG, Roger N. Atlas de Neurologia Clínica. Tradução: VARGA,
Vilma Ribeiro Sousa, Editora Revinter: Rio de Janeiro, 2000.
[Silva, 2002] SILVA, Romero Tavares da. Notas de Aula de Física. Universidade Federal da
Paraíba. Paraíba, 2002. Disponível em
http://www.fisica.ufpb.br/~romero/pdf/02_vetores_e_escalares.pdf, acessado em Maio /
2004.
[Site
ABP]
Associação
Brasil
Parkinson.
O
que
é
Parkinson?
Disponível
em
http://www.parkinson.org.br/, acessado em Março / 2003.
[Tipler, 2000] TIPLER, Paul A. Física para Cientistas e Engenheiros. Volume 1 – Mecânica,
Oscilações e Ondas, Termodinâmica. 4ª Edição. Editora LTC. Rio de Janeiro, 2000.
[Texas, 2002] OP07C, OP07D Precision Operational Amplifiers. Dallas, Texas. USA, 2002. Datasheet.
Disponível em http://www.ti.com, acessado em Abril / 2004.
[UNIFESP] Comunicação UNIFESP – Jornal da Paulista – Sutil Diferença. Ano 16 – N° 183.
Setembro, 2003. Disponível em
http://www.unifesp.br/comunicacao/jpta/ed183/pesquisa3.htm, acessado em Março / 2003.
[Weinberg, 1999] WEINBERG, Harvey. Dual Axis, Low g, Fully Integrated Accelerometers.
Volume 33, Number 1. January, 1999. Disponível em
http://www.analog.com/library/analogDialogue/archives/33-01/accel/index.html, acessado
em Março / 2004.
[Zebulum, 1999] ZEBULUM, Ricardo Salem. Síntese de Circuitos Eletrônicos por Computação
Evolutiva. Tese de Doutorado – PUC/RJ. Rio de Janeiro, 1999. Disponível em
www.ica.ele.puc-rio.br/publicacoes/ download/tes_0003.pdf, acessado em Abril / 2004.
[Zonamedica] Enfermedad de Parkinson. Definición. Disponível em
http://www.zonamedica.com.ar/categorias/medicinailustrada/parquinson/index.html,
acessado em Março / 2004.