DETERMINAÇÃO DOS PARÂMETROS DO CIRCUITO EQUIVALENTE DO
MIT UTILIZANDO DADOS DE PLACA
G. G. C. de Luna, D. A. Caixeta, G. C. Guimarães
Universidade Federal de Uberlândia, Faculdade de Engenharia Elétrica, Uberlândia-MG (Brasil).
[email protected], [email protected], [email protected]
Resumo – Este trabalho apresenta um método para a
determinação dos parâmetros do circuito equivalente dos
motores de indução, a partir dos dados de catálogo do
fabricante. Os parâmetros do circuito equivalente são
obtidos em função da frequência, e é mostrado também o
equacionamento do modelo proposto e os resultados de
algumas simulações no programa PSP-UFU, o qual foi
desenvolvido em linguagem de programação C++ e
possui interface gráfica para a entrada de dados e para o
processamento e apresentação dos resultados do circuito
equivalente. O método proposto e a implementação
computacional garantem resultados precisos e confiáveis.
In
Imin
Ilock
Icx
R1
R2
R3
Ra
X1
X2
X3
Xa
Zcx
cos φnom
η
slip
ZZ1
ZZ2
ZZ3
ZS
I1
I2
I3
Istart
Palavras-Chave – Motor de indução, Parâmetros do
circuito equivalente, PSP-UFU.
DETERMINATION OF PARAMETERS OF
USING THE EQUIVALENT CIRCUIT
BOARD MIT DATA
Abstract - This paper presents a method for
determining the parameters of the equivalent circuit of
the induction motor, from the manufacturer's catalog
data. The equivalent circuit parameters are obtained as a
function of frequency, and also is shown the equalization
of the model and the results of some simulations PSP UFU program which was developed in C++
programming language and has a graphical interface for
input data and for the processing and presentation of
equivalent circuit results. The proposed method and the
computational implementation ensure accurate and
reliable results.
1
Keywords - Induction motor, equivalent circuit
parameters, PSP- UFU.
I. INTRODUÇÃO
Motor de indução trifásico (MIT) de rotor tipo gaiola é o
mais utilizado no mercado de motores elétricos, possuindo
enrolamentos
trifásicos
distribuídos,
simétricos
e
equilibrados no estator, que pode ser caracterizado por três
bobinas concentradas. Cada fase é distribuída espacialmente
por 120º no perímetro do estator, e cada enrolamento possui
o mesmo número de espiras. O modelo matemático para a
operação em regime permanente, chamado modelo de
circuito equivalente, caracteriza a operação do motor de
indução sob condição de alimentação senoidal e equilibrada,
e com velocidade mecânica constante [1].
O primeiro passo para se obter uma análise do seu
desempenho e especificação está na determinação do circuito
equivalente do MIT. Através deste, é possível determinar os
parâmetros relevantes como queda de tensão, correntes,
perdas e conjugado [2, 3].
Basicamente, no estudo de máquinas elétricas, em cursos
de graduação, é apresentado o cálculo dos parâmetros do
circuito equivalente do motor de indução a partir dos dados
obtidos nos ensaios de rotor bloqueado e a vazio. Outros
métodos e ensaios para a estimação dos parâmetros do
circuito equivalente do MIT têm sido apresentados em vários
trabalhos, mas ainda não se chegou a um consenso quanto ao
melhor método ou ensaio [4, 5, 6, 7].
NOMENCLATURA
MIT
En-fn
Vn-ff
Vcx
Pn-pf
Pa
Corrente nominal.
Corrente mínima para iteração do método.
Corrente de rotor bloqueado.
Corrente complexa
Resistência do estator.
Resistência do rotor referida ao estator.
Resistência de magnetização.
Resistência aparente sem R1.
Reatância de dispersão do estator.
Reatância de dispersão do rotor.
Reatância de magnetização.
Reatância aparente.
Impedância complexa.
Fator de potência.
Rendimento.
Escorregamento.
Impedância do rotor.
Impedância do estator.
Impedância de magnetização.
Impedância em função do escorregamento.
Corrente no rotor.
Corrente no estator.
Corrente de magnetização.
Corrente de partida.
Motor de indução trifásico.
Tensão nominal fase-neutro.
Tensão nominal fase-fase.
Tensão complexa.
Potência nominal por fase.
Potência ativa.
1
análise dos mesmos.
A Plataforma de Sistemas de Potência, é um software de
análise de sistemas elétricos de potência gratuito com uma
interface gráfica amigável, outra característica desejável, é
que o programa seja de código aberto (open-source) para a
criação de novos elementos elétricos e desenvolvimentos de
novas funcionalidades.
O desenvolvimento de uma plataforma de análises de
sistemas elétricos de potência, capaz de realizar as seguintes
funções: estudo de fluxo de carga, cálculo de curto-circuito
simétrico e assimétrico, e análise dinâmica através do
programa TransUFU [11]. Por meio de uma GUI é possível
criar uma rede de potência genérica, onde estão presentes os
principais elementos elétricos que podem ser inseridos,
manipulados e visualizados através de várias ferramentas
gráficas. A linguagem de programação escolhida para o
desenvolvimento do programa foi o C++, já para a interface
gráfica foi empregado o wxWidgets, um framework para
criação de GUI multiplataforma [12].
O software desenvolvido foi batizado de Plataforma de
Sistemas de Potência da Universidade Federal de Uberlândia
(PSP-UFU).
Portanto, este trabalho visa apresentar o equacionamento
que, a partir dos dados de placa, determina os parâmetros do
circuito equivalente do MIT, realizando simulações
computacionais no PSP-UFU para verificar a eficácia do
equacionamento retratado.
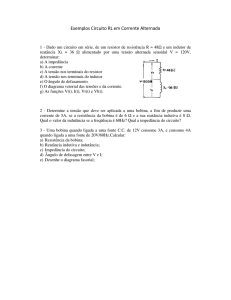
II. CIRCUITO EQUIVALENTE DO MIT PROPOSTO
O circuito equivalente do motor de indução trifásico
utilizado neste estudo será representado por fase e referido ao
estator, tornando desta forma um sistema mais didático e,
com isso, simplificando a interpretação dos resultados,
conforme ilustrado na Figura 1.
Fig. 1. Circuito equivalente do MIT proposto.
Análises realizadas com a utilização dos parâmetros do
circuito equivalente do MIT torna-se de maior importância,
pois, esta representação do motor, contribui para uma maior
eficiência do modelo nos estudos de dinâmica de sistemas
elétricos [8, 9].
Para o cálculo dos parâmetros do circuito equivalente do
motor de indução, são usados os dados fornecidos pelo
fabricante, e de acordo com a NBR 7094/2003 da ABNT, o
catálogo do motor deve apresentar os seguintes dados:
número de fases; tensão nominal; frequência nominal; tipo de
motor (rotor gaiola, rotor bobinado); potência nominal;
velocidade síncrona ou número de polos; classe de
temperatura da isolação do motor; velocidade de rotação
nominal; corrente nominal; corrente com rotor bloqueado;
conjugado nominal; conjugado com rotor bloqueado;
conjugado máximo; rendimento a 100%, 75% e 50% da
potência nominal; fator de potência a 100%, 75% e 50% da
potência nominal; tempo admissível com rotor bloqueado,
partindo da temperatura de operação. [10].
Com estes dados pode-se então determinar todos os
parâmetros a serem utilizados na modelagem, com exceção
da resistência de magnetização Rm, cujo valor é inferior
quando comparado à reatância de magnetização Xm e para
este roteiro de cálculo será desconsiderado por critério de
simplificação.
IV. CÁLCULO DOS PARÂMETROS DO CIRCUITO
EQUIVALENTE
Inicialmente, deve-se determinar o valor da tensão
nominal fase-neutro devido o modelo do circuito equivalente
do MIT está representado por fase, conforme seguinte
equação:
En− fn =
Vn− ff
3
(1)
Na próxima equação obtém-se a potência nominal por
fase:
Pn− pf =
Pa
3
(2)
Com os resultados das equações (1) e (2), juntamente com
o rendimento do MIT e o fator de potência, determina-se a
corrente nominal:
In =
Pn − pf
En − fn . cosϕnom .η
(3)
Como parâmetro de entrada do modelo será necessário
conhecer a razão da corrente de rotor bloqueado pela
corrente nominal, conforme equação (4), porém a mesma
utiliza-se da equação (5) na sequência:
III. PLATAFORMA DE SISTEMAS DE POTÊNCIA
DA UNIVERSIDADE FEDERAL DE UBERLÂNDIA
(PSP-UFU)
Com o aperfeiçoamento dos sistemas, linguagens de
programação e hardwares dos computadores, tornou possível
a implementação de programas computacionais de sistemas
de potência através da interface gráfica do usuário (GUI, do
inglês Graphical User Interface), permitindo a melhoria da
interação do usuário através de elementos gráficos,
proporcionando, maior possibilidade de análise do mesmo
sistema em estudo, com agilidade na criação dos circuitos e
I sp ln =
I lock
In
(4)
Para a determinação da resistência do estator, conforme
(5), será necessário definir qual o valor para o
escorregamento do MIT:
2
R1 =
E n− fn . cosϕ nom
η
.1 −
(
)
In
1
−
slip
Adota-se a reatância de dispersão do estator igual a
reatância de dispersão do rotor referida ao estator, conforme
(16):
(5)
Conforme (6), obtém-se o valor para a tensão complexa:
Vcx = En − fn + 0i
X1 = X 2
(6)
A determinação da resistência do rotor referida ao estator
é dada por (17):
O cálculo da corrente complexa se dá através de (7):
I cx = ( I n . cos ϕ nom ) + ( − I n . (1 − (cos ϕ nom ) 2 )i
R2 = Ra .( X 2 + X 3 ).
(7)
O valor da impedância complexa pode ser determinado
conforme (8):
Z cx =
Vcx
I cx
(16)
slip
((X 2 + X 3 ) − X a )
(17)
A impedância do estator é dada por (18):
Z z1 = R1 + X 1i
(8)
(18)
A resistência aparente (parte real) sem a resistência do
estator pode ser encontrada através de (9):
Para o cálculo da impedância do rotor referida ao estator
são necessários os resultados obtidos nas equações (17) e
(15), conforme evidenciado em (19):
Ra = Z cx ( real ) − R1
Z z 2 = R2 + X 2 i
(9)
(19)
A parte imaginária da impedância complexa é exatamente
a Reatância aparente, conforme (10):
Já para a determinação da impedância de magnetização é
necessário o resultado obtido em (14) e adotar R3 nulo.
X a = Z cx (imaginária )
Z z 3 = R3 + X 3i
(10)
Conhecido o valor do escorregamento pode-se então
determinar da impedância devida ao escorregamento,
utilizando a equação (21):
Este método de cálculo passa por um processo iterativo, e
os limites mínimos e máximos para o somatório das
reatâncias X2 e X3 são calculados conforme equações (11) e
(12):
Zs =
2
( X 2 + X 3 )mínimo
R
= a
Xa
(11)
I1 =
En− fn
I n .I min
2
[(X 2 + X 3 ).((X 2 + X 3 ) − X a )] + [(X 2 + X 3 ).Ra ]
((X 2 + X 3 ) − X a )
(22)
(23)
O cálculo da corrente do rotor referida ao estator é dada
em (24):
(13)
I2 =
V3
Zs
(24)
Por sua vez a determinação da corrente de magnetização é
vista em (25):
I3 =
(14)
V3
Z z3
(25)
A corrente de partida é dada pelo valor da corrente do
estator, conforme equação (26):
Com o valor do somatório definido e o valor retornado
pela equação (14) pode-se então determinar o valor da
reatância de dispersão do rotor referida ao estator, conforme
equação na sequência:
X 2 = ((X 2 + X 3 ) − X 3 )
Vcx
Z .Z
Z z1 + s z 3
Z s + Z z3
V3 = Vcx − (I 1 .Z z1 )
Caso ambos critérios sejam satisfeitos o processo em um
laço para que o seja calculado o valor do somatório, assim
posteriormente poderá ser calculado o valor da reatância de
magnetização, conforme (14):
X3 =
(21)
Para as próximas equações, será necessário determinar a
tensão de magnetização em (23):
(12)
O método iterativo ainda descreve mais uma condição,
caso seja verdadeira a (13), deverá ser utilizado o somatório
máximo, caso contrário deverá utilizar o valor de dez vezes o
somatório mínimo.
( X 2 + X 3 )máximo < 10.( X 2 + X 3 )mínimo
Z z2
slip
A corrente do estator é dada por (22):
Para o valor da corrente mínima descrito na equação (12)
deve-se adotar o valor de 0,1 A, pois as iterações não podem
iniciar com valor nulo devido limitações da mesma equação.
( X 2 + X 3 )máximo =
(20)
I start = I 1
(15)
3
(26)
Tabela II - Determinação dos parâmetros do circuito equivalente
dos MIT´s da WEG linha W22 IR3 Premium
O processo torna-se mais uma vez recursivo, retornando
para a equação (15) por mais 10 iterações até convergir entre
os valores dados pelas equações (11), (12) e (13). O valor do
somatório é dado pela equação (27):
( X 2 + X 3 ) = ( X 2 + X 3 )mín + 0,5.(( X 2 + X 3 ) − ( X 2 + X 3 )mín ) (27)
Por fim, os valores calculados podem ser utilizados para a
simulação, com a utilização do software PSP-UFU.
V. ESTUDO DE CASO
A metodologia proposta para o cálculo dos parâmetros do
MIT, foi desenvolvida utilizando dados do fabricante WEG,
e será apresentada a seguir:
Inicialmente, foi implementado no PSP-UFU o algoritmo
com todo o equacionamento matemático descrito
anteriormente. Contemplando uma tela de “boas vindas” ao
usuário que possibilite o preenchimento de maneira intuitiva,
visando uma melhor iteração com o usuário.
Posteriormente, o algoritmo foi testado comparando com
os valores obtidos através do PSP-UFU com os valores de
corrente, velocidade, rendimento e fator de potência,
calculados por meio do circuito equivalente implementado
com os dados de catálogo do fabricante.
Finalmente, toda a metodologia proposta é testada
comparando-se os resultados da simulação com os dados de
catálogo do fabricante. Foram comparados os conjugados de
partida e nominal e os valores do fator de potência e
rendimento disponíveis nos catálogos de fabricantes com os
valores obtidos pelo método apresentado.
Para a verificação da proposta de cálculo dos parâmetros
do circuito equivalente do MIT é usado os dados de catálogo
de fabricante de motores, cujas principais características de
são apresentadas na Tabela I.
P
[kW]
X1
[pu]
R1
[pu]
R2
[pu]
X2
[pu]
X3
[pu]
15
0.059013
0.043342
0.015461
0.059013
1.83605
30
0.072719
0.035868
0.014913
0.072719
2.08794
45
0.063768
0.032951
0.011824
0.063768
2.22527
75
0.065427
0.031802
0.008856
0.065427
2.24380
90
0.067757
0.032858
0.005953
0.067757
2.15670
110
0.070017
0.031513
0.005881
0.070017
2.28366
185
0.064525
0.027505
0.005874
0.064525
2.36936
VI. CONCLUSÕES
O método para a determinação dos parâmetros do circuito
equivalente do MIT proposto e implementado neste trabalho
permite a análise do comportamento e desempenho e torna-se
uma ferramenta adequada para a simulação, com o objetivo
de melhorar a especificação dos motores ou de sistemas
elétricos que possuem cargas motoras, de modo a assegurar
uma maior eficiência energética.
Dessa forma, utilizando dados de catálogos de fabricantes
de motores, este trabalho objetivou apresentar uma
metodologia para a determinação dos parâmetros do circuito
equivalente do MIT. Em suma, a técnica retratada se baseou
em dados do catálogo do fabricante, possibilitando a
modelagem computacional no software PSP-UFU para a
simulação de fluxo de potência e estabilidade dinâmica.
Portanto, nota-se que o método proposto se mostrou eficaz
com relação ao objetivo pretendido. Dessa forma, o estudo
apresentado pode servir como ferramenta de grande utilidade
para viabilizar o desenvolvimento de estudos dinâmicos
acerca de complexos sistemas industriais com predominância
de cargas motoras.
Tabela I - Dados os MIT retirados do catálogo da WEG linha W22
IR3 Premium
AGRADECIMENTOS
P
[kW]
Ip / In
J
[kgm²]
ω
[rpm]
η
[%]
cos φ
[%]
In
[A]
15
7.7
0.14707
1775
93.4
0.82
25.7
Os autores agradecem a CAPES pelo apoio financeiro a
pesquisa.
30
6.6
0.32017
1775
94.4
0.84
49.6
REFERÊNCIAS
45
7.5
0.74182
1780
95.1
0.86
72.2
75
7.4
1.71411
1785
95.5
0.86
120
90
7.2
2.44250
1790
95.6
0.85
145
110
7.0
2.66455
1790
95.8
0.86
175
185
7.6
3.88580
1790
96.3
0.87
290
[1] JOSÉ, A.T; TEREZA, A.N.B.C. “Determinação dos
parâmetros do circuito equivalente do MIT através de
dados de catálogos de fabricante”, UFSJ – Universidade
Federal de São João del-Rei, nº. 14, 2006.
[2] ASSUNÇÃO, J. T. “Análise e Especificação de Motores
de Indução Trifásicos com Rotor Tipo Gaiola
Controlados Através do Valor Eficaz e Frequência da
Tensão do Estator”, Dissertação de mestrado em
Engenharia Elétrica, EFEI - Escola Federal de
Engenharia de Itajubá, Itajubá, 1990.
[3] LOBOSCO, O.S. e DIAS, J. L. P. C, “Seleção e
Aplicação de Motores Elétricos”, Ed. McGraw-Hill:
Siemens, AS, São Paulo, 351p, 1988.
Para o estudo deste sistema elétrico foram utilizados os
dados de MIT da linha W22 IR3 Premium disponíveis no site
da WEG [13]. Todos os MIT analisados possuem frequência
de 60 Hz, 4 polos e tensão de 440 V.
Na Tabela II, são apresentados os parâmetros do circuito
equivalente do MIT, cuja os resultados foram obtidos através
das simulações computacionais efetuadas no software
PSP - UFU de modo a verificar a eficácia da metodologia.
4
Geraldo Caixeta Guimarães graduou-se em
Engenharia Elétrica pela Universidade
Federal de Uberlândia – UFU – em 1977. Ele
obteve o título de mestre pela Universidade
Federal de Santa Catarina em 1984 e de
Ph.D. pela Universidade de Aberdeen, no
Reino Unido. Atualmente é professor do
Departamento de Engenharia Elétrica da
UFU. Suas áreas de pesquisa são: geração
eólica, geração distribuída. Dinâmica e controle de sistemas
elétricos, fluxo de potência, estabilidade transitória e de tensão e
eletromagnetismo aplicado.
[4] CÓRCOLES; F., PEDRA; J., SALICHS; M. and
SAINZ; L., “Analysis of the induction machine
parameter identification”, IEEE Transactions. Energy
Conversion, vol. 17, pp. 183-190, June 2002.
[5] PEDRA; J., SAINZ; L., “Parameter estimation of
squirrel-cage induction motors without torque
measurements”, IEE Proc.-Electr. Power Appl., vol. 153,
nº 2, March 2006.
[6] WALTERS; S. S. and WILLOUGHBY; R. D,
“Modeling induction motors for system studies”, IEEE
Transactions. Industry Applications, vol. IA-19, pp. 875878, Sep. /Oct, 1983.
[7] JOHNSON; B. K., and WILLIS, J. R., “Tailoring
induction motor analytical models to fit know motor
performance characteristics and satisfy particular study
needs”, IEEE Trans. Power Syst., vol. 6, pp. 959-965,
Aug. 1991.
[8] GUIMARÃES G. C. Curso de Dinâmica de Sistemas
Elétricos – Parte I: Modelagem de uma Máquina
Síncrona e seus Controles para Estudos de Estabilidade
Transitória, Universidade Federal de Uberlândia, 2008.
[9] GUIMARÃES G. C.; Curso de Dinâmica de Sistemas
Elétricos – Parte II: Modelagem de uma Máquina
Síncrona e seus Controles para Estudos de Estabilidade
Transitória, Universidade Federal de Uberlândia, 2008.
[10] NBR 7094/2003, "Máquinas elétricas girantes Motores
de indução - Especificação", ABNT, 2003.
[11] GUIMARÃES G. C. “Manual do TransUFU: Programa
de Análise de Estabilidade Transitória da UFU”,
Universidade Federal de Uberlândia, 2000.
[12] WXWIDGETS. “wxWidgets: Cross-Platform GUI
Library”. Acessado em 18 de novembro de 2015, em:
http://www.wxwidgets.org.
[13] WEG – Catálogo de motores elétricos industriais W22
IR3 Premium. Acessado em: 15 de maio de 2015, em:
http://ecatalog.weg.net/tec_cat/tech_motor_sel_web.asp.
DADOS BIOGRÁFICOS
Glauber George Coelho de Luna, nasceu
em Caruaru-PE, em 1982. Graduou-se em
Engenharia
de
Computação
pela
Universidade de Uberaba –UNIUBE em
2008, em 2012 obteve o título de Especialista
em Segurança do Trabalho pela Faculdade
Pitágoras – Belo Horizonte. Atualmente é
professor da Faculdade Pitágoras de
Uberlândia e mestrando em Engenharia
Elétrica na Universidade Federal de Uberlândia – FEELT e
pesquisador do Laboratório de Dinâmica de Sistemas Elétricos
Daniel Araújo Caixeta nasceu em
Uberlândia-MG, em 1985. Graduou-se em
Engenharia Elétrica pela Universidade Federal
de Uberlândia – UFU – em 2008 e obteve seu
título de mestre em Engenharia Elétrica pela
Universidade Federal de Santa Catarina –
UFSC – em 2010. Já o título de doutor em
Engenharia Elétrica foi obtido em 2014 pela
UFU. Atualmente é professor da Faculdade Pitágoras de Uberlândia
e pesquisador do Laboratório de Dinâmica de Sistemas Elétricos da
UFU. Suas áreas de pesquisa são: geração eólica, geração
distribuída, estabilidade de sistemas elétricos e redes elétricas
inteligentes.
5



![1. [5] Um circuito integrado precisa de uma tensão de alimentação](http://s1.studylibpt.com/store/data/000892095_1-927da8bea174b016f37ec8deb83e76f0-300x300.png)