Instituto Superior Técnico
Departamento de Matemática
Secção de Álgebra e Análise
Exercı́cios Resolvidos
Mudança de Coordenadas
Exercı́cio 1 Considere o conjunto
S = {(x, y) ∈ R2 : −1 < x < 2 ; x2 < y < x2 + 1}
e a função g : R2 → R2 definida por
g(x, y) = (x, y − x2 ).
i) Mostre que g é uma mudança de coordenadas.
Z
ii) Calcule o integral
x2 dxdy usando a mudança de coordenadas g.
S
Resolução:
i)
• A função g, polinomial em cada uma das suas coordenadas, é claramente de classe C 1 .
• A função g é injectiva. De facto, se g(x1 , y1 ) = g(x2 , y2 ), então
(x1 , y1 − x21 ) = (x2 , y2 − x22 )
e, portanto,
x1 = x 2 ; y 1 = y 2 .
• A derivada de g é representada pela matriz
Dg(x, y) =
1
0
−2x 1
e, portanto,
det Dg(x, y) = 1 6= 0.
Assim, g é uma mudança de coordenadas em R2 .
ii) Da descrição do conjunto S temos
−1 < x < 2 ; 0 < y − x2 < 1,
e fazendo (u, v) = g(x, y), obtemos
−1 < u < 2 ; 0 < v < 1.
Seja
T = {(u, v) ∈ R2 : −1 < u < 2 ; 0 < v < 1}.
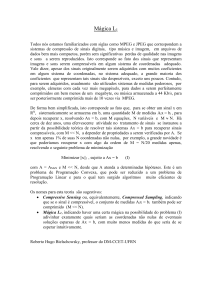
Então, S = g −1 (T ). Na Figura 1 estão representados os conjuntos S e T. Note-se que T é um
intervalo em R2 e, portanto, é vantajoso mudar o domı́nio de integração de S para T.
Note-se também que a mudança de coordenadas adequada é g −1 e que
det Dg −1 (u, v) =
1
= 1.
det Dg(x(u, v), y(u, v))
1
PSfrag replacements
PSfrag replacements
x
y
u
v
S
T
v
y
S
1
y = x2 + 1
−1
−1
y = x2
T
2
-1
2
y=x
y = x2 + 1
x
-1
2
Figura 1:
Portanto,
Z
2
x dxdy =
S
Z
2
T
u | det Dg
−1
(u, v)|dudv
2
Z
=
−1
Z 2
=
Z
1
2
u dv du
0
u2 du
−1
= 3.
Exercı́cio 2
1. Mostre que a função de R2 em R2 , definida pela expressão
u=x
v = y + x2 ,
é uma mudança de coordenadas.
2. Sendo S = {(x, y) ∈ R2 : x > 0 ; y > −x2 ; y < 3 − x2 − 3x}, calcule o integral
Z
2
ey+x dxdy,
S
usando a mudança de coordenadas da alı́nea anterior.
Resolução:
1. Seja g a função definida por (u, v) = g(x, y) = (x, y + x2 ). Então,
(a) g é de classe C 1 , uma vez que é contı́nua e as funções
∂u
= 1;
∂x
∂u
= 0;
∂y
∂v
= 2x ;
∂x
∂v
=1
∂y
são contı́nuas.
(b) g é injectiva. De facto,
(c)
u=x
v = y + x2
⇐⇒
x=u
y = v − u2 ,
isto é, g é invertı́vel e g −1 (u, v) = (u, v − u2 ).
det Dg(x, y) =
2
1 0
2x 1
= 1 6= 0.
u
Portanto, g é uma mudança de coordenadas.
2. Para usar a função g deveremos determinar o conjunto T = g(S).
Note-se que
e, portanto,
S = {(x, y) ∈ R2 : x > 0 ; y + x2 > 0 ; y + x2 < 3 − 3x}
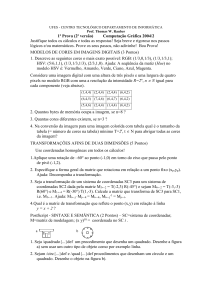
T = {(u, v) ∈ R2 : u > 0 ; 0 < v < 3 − 3u}.
Na Figura 2 estão representados os conjuntos S e T.
y
v
PSfrag replacements
PSfrag replacements
u
v
3
1
v = 3 − 3u
T
y = 3 − x2 − 3x
x
y
v = 3 − 3u
3
1
S
x
y = −x
2
T
S
y = −x2
y = 3 − x2 − 3x
u
Figura 2:
Note-se que a mudança de coordenadas adequada é g −1 e que
det Dg −1 (u, v) =
1
= 1.
det Dg(x(u, v), y(u, v))
Aplicando o Teorema da Mudança de Coordenadas, teremos
Z Z
Z Z
2
ev | det Dg −1 (u, v) dudv
ey+x dxdy =
T
S
Z 1 Z 3−3u
=
ev dv du
0
=
=
Z
0
1
0
(e3−3u − 1)du
e3
4
− .
3
3
Exercı́cio 3 Considere o conjunto
S = {(x, y, z) ∈ R3 : 0 < x < 1 ; x2 − 1 < y < x2 ; x3 < z < x3 + 2}
e a função g : R3 → R3 definida por
g(x, y, z) = (x, y − x2 , z − x3 ).
i) Mostre que a função g é uma mudança de coordenadas.
ii) Use a mudança de coordenadas g para calcular o integral
3
Z
S
z − x3
dxdydz.
1 + x2
Resolução:
i)
– A função g, sendo polinomial, é claramente de classe C 1 .
– A função g é injectiva. De facto, se g(x1 , y1 , z1 ) = g(x2 , y2 , z2 ) então
(x1 , y1 − x21 , z1 − x31 ) = (x2 , y2 − x22 , z2 − x32 )
e, portanto,
x1 = x 2 ; y 1 = y 2 ; z 1 = z 2 .
– A derivada de g é representada pela matriz
1
Dg(x, y, z) = −2x
−3x2
e, portanto,
0 0
1 0
0 1
det Dg(x, y, z) = 1 6= 0.
Assim, g é uma mudança de coordenadas em R3 .
ii) Da descrição do conjunto S temos
0 < x < 1 ; −1 < y − x2 < 0 ; 0 < z − x3 < 2,
e, fazendo (u, v, w) = g(x, y, z), obtemos
0 < u < 1 ; −1 < v < 0 ; 0 < w < 2.
Note-se que, através da função g, ao conjunto S corresponde o intervalo
T = g(S) = {(u, v, w) ∈ R3 : 0 < u < 1 ; −1 < v < 0 ; 0 < w < 2}.
Portanto,
Z
S
z − x3
dxdydz
1 + x2
=
Z
= 2
1
0
Z
Z
1
0
= 2
Z
0
=
1
0
−1
Z
0
−1
2
w
dw
dv du
2
0 1+u
1
dv
du
1 + u2
Z
1
du
1 + u2
π
.
2
Exercı́cio 4 Determine o volume do conjunto
S = {(x, y, z) ∈ R3 : x > 0 ; y > 0 ; x2 + y 2 < z <
usando uma mudança de coordenadas apropriada.
p
x2 + y 2 }
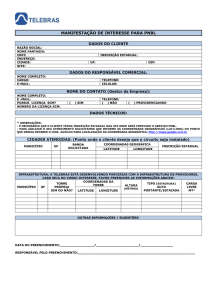
Resolução: O conjunto S apresenta simetria cilı́ndrica em torno do eixo Oz e encontra-se representado na Figura 3.
4
Consideremos as coordenadas cilı́ndricas (ρ, θ, z) definidas por
x = ρ cos θ
y = ρ sen θ
= z.
z
Das inequações x2 + y 2 < z <
p
x2 + y 2 , obtemos
ρ2 < z < ρ,
e das condições x > 0 ; y > 0, concluimos que
0<θ<
π
.
2
z
1
z
S
PSfrag replacements 1
PSfrag replacements
ρ
x
y
S
0
y
0
T
z=ρ
z = ρ2
z=ρ
T
z = ρ2
1
1
x
ρ
Figura 3: O conjunto S e respectivo corte segundo θ fixo
As superfı́cies dadas por z = ρ2 e por z = ρ, intersectam-se para ρ = 1 ou ρ = 0. Portanto,
temos
0<ρ<1
0 < θ < π2
ρ2 < z < ρ.
O conjunto T representado na Figura 3 é o corte em S segundo θ fixo. Fazendo rodar T em
torno do eixo Oz, obtemos o conjunto S.
Sendo ρ o jacobiano da função (ρ, θ, z) 7→ (x, y, z), aplicando o Teorema da Mudança de
Coordenadas, obtemos
Z π/2 Z 1 Z ρ
ρdz dρ dθ
vol(S) =
0
=
=
Z
ρ2
0
π/2
0
π
.
24
Z
1
2
0
ρ(ρ − ρ )dρ dθ
Exercı́cio 5 Calcule as coordenadas do centróide do sólido
1
3 p
V = {(x, y, z) ∈ R3 : y 2 + z 2 ≤ x + ; x ≥ 0, y ≥ 0 ; z ≥ 0 ; x ≤ − y 2 + z 2 },
2
2
usando uma mudança de coordenadas apropriada.
5
Resolução: O sólido tem simetria cilı́ndrica em torno do eixo Ox. Por isso, convém considerar
coordenadas cilı́ndricas em torno deste eixo:
x = x
y = ρ cos θ
z = ρ sen θ.
Nestas coordenadas o sólido passa a ser descrito pelas condições seguintes:
2
ρ ≤ x + 12
ρ sen θ ≥ 0
ρ cos θ ≥ 0
x≥0
x ≤ 23 − ρ.
A segunda e terceira condições traduzem-se simplesmente em 0 ≤ θ ≤
PSfrag replacements
PSfrag replacements
ρ
z
x = 32 − ρ
x = ρ2 − 21
3
2
x=
3
2
−ρ
1
2
1
1
2
3
2
√1
2
Na Figura 4 encontra-se
x
y
z
V
V
π
2.
x = ρ2 − 21
x
√1
2
y
1
ρ
Figura 4: O sólido V e respectivo corte segundo θ fixo
representado o sólido V bem como um corte em V segundo θ fixo. Assim, teremos
!
Z π2 Z 12 Z √x+ 21
Z 23 Z 32 −x
vol(V ) =
ρdρdx +
ρdρdx dθ
0
=
=
π
2
0
Z
1
2
0
1
2
0
1
2
x+
dx +
2
17π
.
96
Z
3
2
1
2
( 23
0
2
− x)
dx
2
!
Por simetria, uma vez que o sólido não se altera trocando as coordenadas y e z, temos y = z.
A coordenada y é calculada da forma seguinte:
!
R
Z π2 Z 21 Z √x+ 21
Z 32 Z 32 −x
y
96
2
2
V
y=
ρ cos θdρdx +
ρ cos θdρdx dθ
=
1
vol(V )
17π 0
0
0
0
2
!
Z π2
Z 12
3
Z 32 3
(x + 21 ) 2
( 2 − x)3
96
=
cos θdθ
dx +
dx
1
17π 0
3
3
0
2
√
8(13 2 − 2)
√
.
=
85π 2
6
Da mesma forma se calcula a coordenada x :
!
R
Z π2 Z 12 Z √x+ 21
Z 23 Z 32 −x
x
96
ρxdρdx +
xρdρdx dθ
x= V
=
1
vol(V )
17π 0
0
0
0
2
!
Z 12
Z 32
x + 21
( 23 − x)2
96 π
x
=
x
dx +
dx
1
17π 2
2
2
0
2
=
1
.
2
Exercı́cio 6 Calcule o momento de inércia, relativo ao eixo Oz, do sólido
p
p
V = {(x, y, z) ∈ R3 : − x2 + y 2 ≤ z ≤ x2 + y 2 ; 0 ≤ x2 + y 2 ≤ 1},
sabendo que a densidade de massa é a função α(x, y, z) = y 2 .
Resolução: O sólido tem simetria cilı́ndrica em
coordenadas cilı́ndricas em torno deste eixo:
x =
y =
z =
torno do eixo Oz. Por isso, convém considerar
ρ cos θ
ρ sen θ
z.
O sólido V é a intersecção da região exterior a dois cones, unidos na origem pelos vértices, e da
região interior
O cone superior é descrito pela
pao cilindro vertical de raio 1 centrado na origem.
p
equação z = x2 + y 2 e o cone inferior pela equação z = − x2 + y 2 .
Nas coordenadas cilı́ndricas o sólido V define-se da seguinte forma:
−ρ ≤ z ≤ ρ ;
0 ≤ ρ ≤ 1.
Na Figura 5 encontra-se representado um corte em V, segundo θ fixo.
z
z=ρ
1 ρ
PSfrag replacements
z = −ρ
Figura 5: Corte em V segundo θ fixo
A distância d(x, y, z) de um ponto (x, y, z) ∈ V ao eixo Oz é dada por
p
d(x, y, z) = ||(x, y, 0)|| = x2 + y 2 = ρ.
7
Assim, pela definição de momento de inércia, temos:
Z
Z 2π Z
2
I=
α(x, y, z)d (x, y, z)dxdydz =
V
0
Z
=
1
0
2π
Z
2
0
2 2
ρ (sen θ) ρ ρdz dρ dθ
−ρ
(sen θ)2 dθ
2π
.
7
=
ρ
Z
1
2ρ6 dρ
0
Exercı́cio 7 Determine o volume do conjunto
S = {(x, y, z) ∈ R3 : x > 0 ; y > 0 ; 0 < z <
usando uma mudança de coordenadas apropriada.
p
x2 + y 2 ; x2 + y 2 + z 2 < 1},
p
Resolução: O conjunto S é limitado pelo cone z = x2 + y 2 e pela esfera x2 + y 2 + z 2 = 1 e,
portanto, apresenta tanto simetria cilı́ndrica como simetria esférica e encontra-se representado na
Figura 6.
z
S
√
2
2
y
PSfrag replacements
z
1
x
Figura 6: Esboço do conjunto S
1. Coordenadas esféricas:
Nas coordenadas esféricas (r, θ, φ), as condições x > 0 ; y > 0 traduzem-se em
π
0<θ< .
2
p
Das inequações 0 < z < x2 + y 2 , obtemos
π
π
<φ< .
4
2
Da inequação x2 + y 2 + z 2 < 1 concluimos que
0 < r < 1.
Portanto, em coordenadas esféricas, S é descrito pelas condições
0<r<1
0 < θ < π2
π
π
4 < φ < 2.
8
Do Teorema da Mudança de Coordenadas, obtemos
vol(S) =
=
=
Z
1
Z
0
π
2
Z
1
0
√
π 2
.
12
π
2
Z
π
4
Z
π
2
π
2
2
r sen φdθ
0
!
!
dφ dr
!
2
r sen φdφ dr
π
4
2. Coordenadas cilı́ndricas:
Consideremos as coordenadas cilı́ndricas (ρ, θ, z) em que ρ =
Dado que x > 0 ; y > 0, então
0<θ<
Das inequações 0 < z <
p
π
.
2
p
x2 + y 2 .
x2 + y 2 , obtemos
0<z<ρ
e da inequação x2 + y 2 + z 2 < 1, temos
ρ2 + z 2 < 1,
ou seja,
ρ<
p
1 − z 2.
As superfı́cies z = 0 (plano) e ρ2 + z 2 = 1 (esfera) intersectam-se em ρ = 1.
As superfı́cies z = ρ (cone) e ρ2 + z 2 = 1 (esfera) intersectam-se segundo z =
z
PSfrag replacements
√
2
2
ρ=
ρ=z
√
1 − z2
0
√
2
2
1
ρ
Figura 7: Corte em S segundo θ constante
Portanto, em coordenadas cilı́ndricas, S é descrito pelas condições
0 < θ < √π2
0 < z√
< 22
z < ρ < 1 − z2.
Na Figura 7 está representado um corte em S segundo θ fixo.
9
√
2
2 .
Do Teorema da Mudança de Coordenadas, temos
vol(S) =
=
=
Z
π
2
Z
0
1
2
Z
π
2
√
2
2
0
Z
0
√
π 2
.
12
Z
√
2
2
0
√
1−z 2
!
ρdρ dz
z
(1 − 2z 2 )dz
!
!
dθ
dθ
Exercı́cio 8 Considere o sólido
S = {(x, y, z) ∈ R3 : z 2 <
1 2
(x + y 2 ) ; x2 + y 2 + z 2 < 4 ; x2 + y 2 > 1 ; y > 0}.
3
1. Calcule o volume de S usando coordenadas esféricas.
1
2. Assumindo que a densidade de massa de S é a função f (x, y, z) = x2 +y
2 , calcule o momento
de inércia de S relativo ao eixo Oz, usando coordenadas cilı́ndricas.
Resolução: O sólido S encontra-se representado na Figura 8.
z
S
PSfrag replacements
y
x
Figura 8: Esboço do sólido S
1. O volume de S é dado pelo integral vol(S) =
Z
1 dxdydz.
S
Em coordenadas esféricas (r, θ, φ), o conjunto S descreve-se da seguinte forma:
z2 <
1 2
(x + y 2 )
3
r2 cos2 φ <
⇐⇒
tan2 φ > 3
π
2π
<φ<
3
3
r<2
r2 sen2 φ > 1
1
r>
sen φ
r sen φ sen θ > 0
⇐⇒
x2 + y 2 + z 2 < 4
x2 + y 2 > 1
⇐⇒
⇐⇒
⇐⇒
y>0
1 2
r sen2 φ
3
⇐⇒
⇐⇒
⇐⇒
⇐⇒
10
sen θ > 0
0 < θ < π.
Assim, teremos
Z
vol(S) =
Z
=
π
Z
0
π
Z
0
π
8
3
2π
3
Z
π
3
2π
3
π
3
2
r2 sen φdr
1
sen φ
8
1
−
3 3 sen3 φ
π
2π
+ cos
=
− cos
3
3
0
8
2
= π
.
− √
3 3 3
Z
!
!
dφ dθ
!
sen φ dφ dθ
2π !
1 cos φ 3
dθ
+
3 sen φ π
3
2. O momento de inércia de S em relação ao eixo Oz é dado pelo integral
Z
1
(x2 + y 2 )dxdydz = vol(S).
I=
2 + y2
x
S
Em coordenadas cilı́ndricas (ρ, θ, φ), o conjunto S descreve-se da forma seguinte:
z2 <
1 2
(x + y 2 )
3
1 2
r
3
1
|z| < √ r
3
r2 + z 2 < 4
z2 <
⇐⇒
⇐⇒
x2 + y 2 + z 2 < 4
2
2
x +y >1
y>0
⇐⇒
⇐⇒
⇐⇒
r>1
0 < θ < π.
z
PSfrag replacements
z=
√1 r
3
z 2 + ρ2 = 4
√
1
r=1
3
2
ρ
z = − √13 r
Figura 9: Corte em S com θ fixo
Portanto, tendo em conta o corte em S com θ fixo, o momento de inércia é dado por
!
! !
Z π Z √3 Z √1 r
Z 2 Z √4−r2
3
I =
rdz dr + √
rdz dr dθ =
√
0
= π
Z
1
√
3
1
− √13 r
2
√ r2 dr +
3
3
Z
2
√
3
2r
p
4 − r2 dr
2
2 23 2
(4
−
r
)
= π 2 − √ −
3
√
3 3
2
3
8
2
= π
− √
.
3 3 3
11
− 4−r 2
!