Sumário
12 Momento Angular
12.1 Introdução
1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12.2 Momento Angular de Uma Partícula
1
. . . . . . . . . . . . . . . . . . . . . . .
1
12.2.1 Partícula percorrendo uma reta . . . . . . . . . . . . . . . . . . . . . .
3
12.2.2 Partícula percorrendo um círculo
4
. . . . . . . . . . . . . . . . . . . . .
12.3 Momento Angular de um Corpo Rígido . . . . . . . . . . . . . . . . . . . . . .
7
12.4 Conservação do Momento Angular . . . . . . . . . . . . . . . . . . . . . . . . .
13
12.5 Impulso Angular
19
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
i
Capítulo 12
Momento Angular
12.1
Introdução
Elétrons, núcleons e moléculas - rodas, engrenagens e polias - planetas, estrelas e galáxias - tudo
gira. O que faz uma roda girar? Uma vez girando, o que a faz parar? Um torque exercido sobre a
roda acarreta uma variação em sua velocidade angular.
Uma vez em movimento, a roda tende a continuar girando. Os torques devido ao atrito nos
mancais e a resitência do ar reduzem a velocidade da roda, levando-a parar. O fato de que a roda
tende a continuar girando evidencia a existência de momento associado ao movimento rotacional
- o momento angular.
12.2
Momento Angular de Uma Partícula
A cada grandeza rotacional existe uma grandeza análoga referente ao movimento de translação de
uma partícula. A grandeza rotacional análoga ao momento linear p⃗ é o momento angular, ⃗l
⃗ . A conservação do momento linear foi estabelecida utilizando as leis de Newton. Da mesma
ou L
forma, as leis de Newton conduzem a outro princípio de conservação - o princípio de conservação
do momento angular.
A força aplicada a uma partícula de massa m produz uma variação da velocidade, d⃗v /dt,
e escrevemos, F⃗ = m d⃗v /dt. Essa força produz um torque sobre a partícula localizada a uma
distância r da origem O, Fig.(12.1), de um referencial inercial.
Escrevemos
d
d⃗r
d⃗v
= (⃗r × m ⃗v ) −
× m ⃗v .
⃗τ = ⃗r × m
dt
dt
dt
O último termo é nulo, pois d⃗r/dt = ⃗v e o produto vetorial com o vetor m ⃗v é igual a zero. Dessa
forma a expressão acima se torna
⃗τ = ⃗r × m
d⃗v
d
= (⃗r × m ⃗v ).
dt
dt
1
2
Cap. 12.
⃗τ =
Momento Angular
d⃗
L.
dt
(12.1)
⃗ denido como sendo o vetor momento angular.
O termo ⃗r × m ⃗v foi substituída pelo vetor L
⃗ com p⃗ (o momento linear) é análoga à relação que liga o
A relação do momento angular L
⃗
torque com a força, ⃗τ = ⃗r × F .
⃗ ≡ ⃗r × p⃗ = ⃗r × m⃗v
L
(12.2)
e dizemos que
o momento angular de uma partícula em relação a um ponto de referência
0,
é igual
⃗r da partícula medido a partir de 0, pelo momento
p⃗ da partícula.
A dimensão do momento angular em SI é kg.m2 /s. O módulo L do momento angular é
ao produto vetorial do vetor posição
linear
L = r p senϕ,
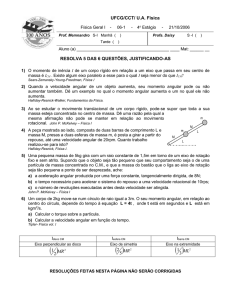
onde ϕ é o ângulo entre ⃗r e p⃗. A direção do vetor momento angular é perpendicular ao plano
formado por ⃗r e p⃗ e o seu sentido pode ser determinado pela regra da mão direita. No caso
⃗ aponta na direção Z.
apresentado na Fig.(12.1) o L
Figura 12.1: Uma partícula de massa
m
move no plano
angular da partícula em relação um eixo é
vetores posição da partícula
p⃗.
⃗ = ⃗r × p⃗
L
x y.
O momento
perpendicular aos
⃗r em relação ao eixo e ao vetor momento linear
12.2.
3
Momento Angular de Uma Partícula
Quando uma força resultante F⃗ atua sobre uma partícula, sua velocidade e seu momento linear
variam, de modo que seu momento angular também pode variar. Derivando a Eq.(12.2) em relação
ao tempo e usando a regra de um produto, obtemos:
⃗
dL
d⃗r
d⃗v
=
× m⃗v + ⃗r × m = ⃗v × m⃗v + ⃗r × m⃗a
dt
dt
dt
O primeiro termo é zero porque contém o produto vetorial do vetor ⃗v por ele mesmo. No
segundo termo temos a força resultante F⃗ (= m⃗a) e obtemos
⃗
dL
dt
= ⃗r × F⃗ = ⃗τ .
(12.3)
A taxa de variação do momento angular de uma partícula é igual ao torque da força
resultante que atua sobre ela.
Usaremos a Eq.(12.2) para encontrar o momento angular total de uma partícula que move em
linha reta e num círculo.
12.2.1
Partícula percorrendo uma reta
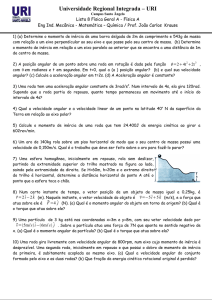
Uma partícula mesmo movendo em uma trajetória retilínea possui momento angular. A Fig.(12.2)
mostra uma partícula no plano XY movendo-se em linha reta paralela ao eixo X. O vetor ⃗r é o
vetor posição em relação a um eixo de rotação que passa pelo O num referencial inercial. O seu
momento linear é p⃗ = m ⃗v e o momento angular, L = m v r⊥ . A distância r⊥ = r senϕ é aquela
da trajetória da partícula ao eixo X e é constante. O vetor ⃗r varia continuamente em sua posição
porque a sua direção, ângulo ϕ, do vetor ⃗r varia, no caso r cresce e ϕ decresce mantendo o produto
constante. Pela equação Eq.(12.2), o módulo do momento angular da partícula em relação ao eixo
que passa pela origem O é
L = r p senϕ = m v r⊥ ,
(12.4)
Se a velocidade da partícula é constante, seu momento angular é constante; de outro modo, varia
⃗ para a partícula na Fig.(12.2) aponta no
com o tempo. Pela regra da mão direita, o vetor L
sentido −k̂ (vetor entrando na página).
Mostramos aqui que existe momento angular mesmo se a partícula não estivesse movendo em
uma trajetória circular. A variação da posição angular (não necessariamente uma volta completa)
aparece no ângulo ϕ em relação ao eixo deslocado da trajetória da partícula.
4
Cap. 12.
Momento Angular
Figura 12.2: Uma partícula no plano XY movendo-se em linha reta
paralela ao eixo-X.
Qual é o momento angular, em relação à origem, de uma partícula de 40, 0 kg ,
no instante em que sua posição é ⃗r = −3, 50î + 1, 50 ĵ , em metros, e sua velociade vetorial é
⃗v = 2, 00 î − 6, 00 ĵ , em metros por segundo?
Exemplo
Solução
Calculamos
1:
Utilizamos a denição do momento angular de uma partícula apresentada na Eq.(12.2).
⃗ = m ⃗r × ⃗v = 40, 0(−3, 5î + 1, 50 ĵ) × (2, 00 î − 6, 00 ĵ)
L
= 40, 0[(3, 5)(6, 0) − (1, 5)(2, 0)]k̂
= 40(21 − 3) = (40)(18) = 720
⃗ = 7, 20 × 102 k̂ (kg.m2 /s).
L
O vetor momento angular aponta na direção Z negativo e é constante, consequentemente, o
torque é nulo.
12.2.2
Partícula percorrendo um círculo
Caso simples e importante a considerar é o de uma partícula percorrendo um círculo de raio r,
Fig.(12.3). Determina-se o momento angular em relação ao centro do círculo por onde passa o
eixo de rotação. Como a velocidade ⃗v é perpendicular ao vetor posição ⃗r, logo pela Eq.(12.2),
L = r p = r m v.
(12.5)
O sentido do vetor momento angular pode ser determinado utilizando a regra de mão direita
entre os vetores ⃗r e p⃗ da Fig.(12.3). Os vetores ⃗r e p⃗ estão contidos no plano XY, signica que
12.2.
5
Momento Angular de Uma Partícula
Figura 12.3: Partícula em movimento circular no plano XY. O seu
o momento angular em relação à origem
0
é
⃗ = mr2 ω k̂ .
L
⃗ se dispõe ao longo do eixo z e aponta para +k̂ (ou −k̂ se o movimento da partícula é horário).
L
Dessa forma, escreve-se o momento angular, na forma vetorial, como
⃗ = m r2 ω k̂ = I ω
L
⃗.
(12.6)
⃗ eω
Foi utilizado a relação v = r ω , onde ω é a velocidae angular da partícula. Observe que L
⃗ são
2
paralelos e a grandeza m r é a inércia rotacional da partícula em relação ao eixo z .
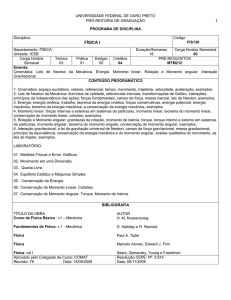
Uma conta de 72 g desliza sem atrito em um arame circular orientado verticalmente, de 0, 90 m de raio, Fig.(12.4). (a) Se a conta é liberada do repouso em θ0 = 0, 93 rad,
qual é seu vetor momento angular em relação ao centro do círculo no instante em que ela cruza o
eixo X ? (b) Calcule, na mesma situação, a variação do momento angular. (c) Comente os movimentos acelerado e desacelerado que a conta realiza enquanto ela se deloca descendo e subindo
pelo arame circular, pelos lados esquerdo e direito da gura.
Exemplo 2:
Um corpo colocado livremente numa posição vertical tende a se mover para baixo sob
a ação de uma força - a força gravitacional. Este corpo, a conta, move ao longo do arame circular
de raio r = 0, 90 m que será a sua linha de trajetória em torno do eixo que passa pelo centro do
círculo em O. Em cada instante de seu movimento, a força gravitacional produz um torque em
relação ao eixo. A posição inicial em graus é 53, 3o . O momento angular é calculado utilizando-se
⃗ O = m ⃗r × ⃗v .
a Eq.(12.2):L
(a) Quando a conta passa pelo eixo X , os vetores ⃗
r e ⃗v são perpendiculares e o momento angular
resulta em
Solução
⃗ O = −r m v k̂.
L
A velocidade é obtida utilizando a lei da conservação da energia:
6
Cap. 12.
Momento Angular
√
m v2
= m g h0 = m g r senθ0 ⇒ v = 2 g r senθ0 .
2
√
O valor encontrado é v = 2 (10, 0) (0, 90) sen(0, 93) = 3, 80 m/s. O momento angular é
calculado cujo valor é
⃗ O = −0, 25 k̂ (kg m2 /s).
L
O vetor momento angular aponta para dentro da página.
(b) A variação do momento angular é o torque devido a força aplicada sobre o corpo, no caso, é a
força gravitacional. Quando a conta passa pelo eixo X , os vetores ⃗r e a força gravitacional estão
perpendiculares entre si e resulta em
⃗
dL
= ⃗τO = ⃗r × m ⃗g = −r m g k̂ = −0, 65 k̂ N m.
dt
⃗ são paralelos, signica que o movimento de rotação é acelerado.
Como os vetores ⃗τO e L
(c) O movimento acelerado acontece também quando a conta desce no arame pelo lado esquerdo
da gura. Usando a regra da mão direita para os produtos ⃗r × m⃗g e ⃗r × m⃗v , encontramos que o
⃗ . O movimento é desacelerado
sentido de ⃗τ é o sentido positivo do eixo Z , o mesmo que o de L
⃗ aponta em direção +k̂ (rotação em sentido antiquando a conta sobe no lado direito. O vetor L
horário) e o sentido do vetor torque é o sentido negativo do eixo Z , −k̂ . Quando a conta sobe no
lado esquerdo, os sentidos dos vetores se alternam e o movimento é desacelerado também.
Figura 12.4: Uma conta desliza sem atrito em um arame
circular orientado verticalmente.
12.3.
12.3
7
Momento Angular de um Corpo Rígido
Momento Angular de um Corpo Rígido
Um corpo rígido gira em torno do eixo z Considera-se o corpo rígido constituído de n partículas,
cada uma delas de massa mi na posição ⃗ri em relação à origem O, e que se desloca com a
velocidade escalar ⃗v i = ri ω , Fig.(12.5). O seu momento angular é
⃗ i = mi ri2 ω
L
⃗.
(12.7)
Figura 12.5: O elemento de massa de um corpo rígido gira ao redor de
um eixo e o momento angular
⃗
L
do corpo rígido em relação ao eixo está
na mesma direção da velocidade angular
ω
⃗.
O momento angular deste corpo é a soma dos momentos angulares das partículas individuais:
∑
⃗i
⃗ =
L
L
(12.8)
Se o corpo rígido gira em torno de um eixo de simetria que passa pelo seu centro de massa, o
momento angular é
⃗ = ( ∑ mi r 2 ) ω
⃗
L
i ⃗ = Iω
(12.9)
A Eq.(12.9) vale tanto para o corpo que esteja girando em torno de um eixo de simetria que
passa pelo seu centro de massa como para o corpo em rotação em torno de um eixo que é paralelo
àquele que passa pelo centro de massa de um corpo, Fig.(12.6). Neste caso utilizamos o teorema
de eixos paralelos para expressar a inercia rotacional em relação ao eixo em O′ . De acordo com
este teorema, a inércia rotacional I ′ em torno do eixo z ′ é
I ′ = Icm + m d2 ,
8
Cap. 12.
Momento Angular
onde m é a massa total do corpo. Multiplicando cada elemento por ω
⃗ , obtemos
I ′ω
⃗ = Icm ω
⃗ + m d2 ω
⃗.
Figura 12.6: (a)Elemento de massa, como partícula, de um corpo
rígido e o seu momento angular em relação à origem.
A grandeza I ′ ω
⃗ é o momento angular em relação ao eixo em O′ , enquanto Icm ω
⃗ é o momento
2
angular em relação ao eixo passando pelo centro de massa. A grandeza m d ω
⃗ é o momento
angular de um corpo rígido como uma partícula de massa m que gira com velocidade angular ω
num círculo de raio d em torno do eixo em O′ . A Eq.(12.9) é reescrita como
⃗ =L
⃗ cm + ⃗rcm × m ⃗vcm .
L
(12.10)
A variação do momento angular para uma partícula, Eq.(12.8), é extendida para um corpo
rígido considerando constituído de n−partículas, dessa forma escrevemos como
∑
∑ dL
⃗
⃗i
d ∑⃗
dL
= (
Li ) =
(12.11)
τ⃗i =
dt
dt
dt
Nesta equação a soma dos torques pode incluir tanto os torques internos como os devidos às
forças externas ao sistema. As forças internas entre as duas partículas atuam paralelamente à reta
que as une, e satisfazem a terceira lei de Newton, logo a soma dos torques internos é nula,
∑
⃗τext =
⃗
dL
dt
(12.12)
12.3.
9
Momento Angular de um Corpo Rígido
Figura 12.7: (b) O corpo gira em torno de um eixo deslocado do centro de massa do corpo.
Esta é igual a Eq.(12.3) obtida para uma partícula.
A taxa de variação do momento angular
de um sistema é igual ao torque resultante que atua sobre o sistema em virtude das forças
externas.
No exemplo a seguir é apresentado
quatro métodos de resoluções
ao mesmo problema.
A Fig.(12.8a) mostra dois corpos unidos um o leve e inextensível passando por
uma polia xa ao teto. Consideramos a polia de raio R e massa m e não há atrito em seu eixo. Os
corpos de massas m1 e m2 ( m2 > m1 ) se movem com aceleração linear a, a partir do repouso, no
sentido indicado na gura. A corda não desliza sobre a superfície da polia. Encontrar a expressão
para a aceleração linear dos dois corpos.
Exemplo 3:
Como o corpo m2 possui maior massa, então ele desce e outro sobe com a mesma
aceleração em módulo, uma vez que a corda é inextensível. Todos os pontos da corda e da borda
da polia possuem a mesma velocidade linear v e vale a relação v = R ω , onde ω é a velocidade
angular da polia. Do mesmo modo, entre as acelerações linear e angular, a = R α.
Solução
Primeiro Método Aplicaremos para esta análise: as equações dinâmicas de movimento dos
corpos como partículas sob uma força resultante (segunda lei de Newton de translação); e a polia
como um corpo rígido sob um torque resultante. A polia gira no sentido horário e os vetores das
10
Cap. 12.
Momento Angular
grandezas de rotação têm direção entrando no plano da gura, −k̂ . Aqui separamos os corpos
em três partes conforme os diagramas de forças construídos, Fig.(12.8b). O vetor torque atuando
sobre a polia em seu eixo de rotação é ⃗τ = ⃗τ1 +⃗τ2 , onde os índices 1 e 2 se referem às contribuições
das forças T1 e T2 exercidas pela corda nas bordas direita e esquerda da polia. A força gravitacional
exercidad pela Terra sobre a polia, m g e a força de reação exercida pelo eixo sobre a polia passam
pelo eixo de rotação e, portanto, não produzem torque. As expressões escalares de torque e de
movimento dos corpos são
T1 R − T2 R = −I α =⇒ (T2 − T1 )R = I α,
T1 − m1 g = m1 a; T2 − m2 g = −m2 a.
(12.13)
(12.14)
O sinal negativo se refere ao sentido negativo de orientação dos vetores. As acelerações angular
da polia e translacional dos corpos são relacionados por a = R α. Usando esta relação e operando
as Eqs.(12.13) e (12.14), obtemos a expressão para a aceleração translacional:
a=
m2 − m1 )g
.
m1 + m2 + I/R2
(12.15)
As tensões na corda e a reação R se obtem pelas expressões
T1 = m1 (g + a),
T2 = m2 (g − a),
R = T1 + T2 + m g.
(12.16)
(12.17)
Segundo Método O princípio de conservação da energia é utilizado.
Considera-se que os
corpos se movem verticalmente a uma distância h, m1 para cima e m2 para baixo. Considera-se,
na posição inicial dos corpos, a referência de energia potencial nula e energia cinética, também,
nula por que os corpos iniciam o movimento do repouso. Destas considerações escrevemos
m1 g h − m1 g h +
m1 v 2 m1 v 2 I ω 2
+
+
= 0.
2
2
2
(12.18)
A velocidade angular da polia se relaciona com a velocidade linear de um ponto da borda deste
corpo por ω = v/R. Usando esta relação e a Eq.(12.18) para expressar v 2 como
[
]
(m2 − m1 )g
2
v =2
h.
(12.19)
m1 + m2 + I/R2
Esta expressão é a conhecida equação de Torricelli, onde o termo entre colchetes é a aceleração
dos corpos. Deste modo
a=
(m2 − m1 )g
.
m1 + m2 + I/R2
(12.20)
12.3.
Momento Angular de um Corpo Rígido
Figura 12.8:
Exemplo 3:
11
(a) Dois corpos e uma polia (máquina de
Atwood). (b) Diagrama de forças envolvidas no sistema.
é a expressão anteriomente obtida, Eq.(12.15).
Terceiro Método Nesta análise identicamos a polia e os corpos como um sistema não
isolado, Fig.(12.8a),
sujeito ao torque externo devido à força gravitacional sobre os corpos. A
∑
equação , ⃗τext = Is α
⃗ , é utilizada, onde Is é a inércia rotacional do sistema composto por polia
e dois corpos. Escrevemos
m1 g R − m2 g R = −Is α.
(12.21)
Consideramos os corpos na borda da polia, então
I s = I + m1 R 2 + m2 R 2
e usando α = a/R, obtemos da expressão acima, Eq.(12.21), para a aceleração escalar de translação a.
Quarto Método
Neste último método, com as mesmas considerações do terceiro método,
utilizamos a Eq.(12.12), ou seja, o momento angular. O sentido de movimento dos corpos é horário
e escrevemos o momento angular com sinal negativo:
L = −m1 v R − m2 v R − I v/R = −(m1 + m2 + I/R2 ) R V.
Aplicando a derivada, temos
dL
= −(m1 + m2 + I/R2 ) R a.
dt
12
Cap. 12.
Momento Angular
A Eq.(12.12 se torna
m1 g R − m2 g R = −(m1 + m2 + I/R2 ) R a
(12.22)
e a expressão para aceleração a é obtida.
Pretendeu-se mostrar neste exemplo, a máquina de Atwood, já conhecida nas
aplicações das Leis Newton, como os conceitos de torque e momento angular são utilizados e suas
expressões relacionadas. Nos dois primeiros métodos foram utilizadas as equações de movimento e
da energia que são de fácil entendimento. Nos dois últimos métodos, o aluno deve anotar, analisar
com cuidado as expressões de torque aplicado, a inércia rotacional do sistema e o momento angular.
Observações
Um contrapeso de massa m é preso a um cabo leve que é enrolado em torno
de uma polia, Fig.(12.9). A polia é um aro no de raio R e massa M . Os raios da polia têm
massa desprezível. (a) Qual é o módulo do torque resultante sobre o sistema em torno do eixo
da polia? (b) Quando o contrapeso tem uma velocidade escalar v , a polia tem uma velocidade
angular ω = v/R. Determine o módulo do momento angular total em torno do eixo da polia. (c)
⃗ , calcule a aceleração do contrapeso.
Utilizando o resultado da parte (b) e ⃗τ = dL/dt
Exemplo 4:
Quando o sistema é liberado, a esfera m cai e a polia gira no sentido anti-horário. Este
problema é semelhante ao da máquina de Atwood que resolvemos utilizando,separadamente, as
equações de movimento dos corpos sob a ação das forças externas, tensão e força gravitacional.
Aqui a abordagem é diferente visto que utilizaremos o momento angular.
Identicamos a esfera e polia como um único sistema não isolado, sujeito ao torque externo
devido a força gravitacional sobre a esfera. Calculamos o momento angular em relação ao eixo da
polia da esfera em movimento de translação (como uma partícula) e o da polia em rotação pura (
aro de momento de inércia I = M R2 ).
A esfera tem uma velocidade escalar v , então o momento angular da esfera é m v R. No mesmo
instante, todos os pontos no aro da polia também se movem com a velocidade escalar v e a relação
com a velocidade angular ω é v = R ω , então o momento angular da polia é I ω = M v R.
Solução
Figura 12.9: Exemplo 4: Polia e contrapeso.
(a) Trataremos o torque externo total sobre o sistema em torno do eixo da polia. A força gravi-
tacional sobre a polia e a reação normal do eixo sobre a polia não contribuem com o torque por
12.4.
13
Conservação do Momento Angular
que as linhas de ação destas duas forças passam pelo eixo, ou seja, o braço de momento é zero.
A força gravitacional m ⃗g que age sobre a esfera produz um torque cujo módulo é m g R. Aqui R
é o braço de momento da força em torno do eixo. O torque externo resultante em torno do eixo
da polia é
∑
τext = m g R
.
(b) O momento angular total do sistema é
L = m v R + M v R = (m + M )v R.
(c) Substituindo esta expressão e o torque externo resultante na equação 12.12, escrevemos
mgR =
d
dv
[(m + M )v R] = (m + M )R
dt
dt
Como dv/dt = a, obtemos a expressão para a:
a=
Observações
mg
.
m+M
: Ao expressar o torque resultante em relação ao eixo da polia, não incluimos
as forças que o cabo exerce sobre os corpos porque elas são forças internas ao sistema considerado.
Em vez disso, analisamos o sistema como um todo. Se a polia for muito leve, M << m, então
a ≈ g e se comporta como se não existisse a polia. Por outro lado, se M >> m, então a ≈ 0
signica que a força gravitacional m g não é suciente para mover (girar) a polia.
12.4
Conservação do Momento Angular
Quando não há torque externo resultante agindo sobre o sistema, a Eq.(12.12) resulta em
⃗
dL
dt
A Eq.(12.23) é a
⃗ = constante.
= 0, =⇒ L
lei da conservação do momento angular
(12.23)
e diz que:
Se o torque externo resultante que atua sobre um sistema é igual a zero, então o momento
⃗ do sistema permanece constante.
L
Podemos aplicar esta lei ao corpo isolado, o qual gira em torno do eixo, dito eixo de rotação.
Suponha que o corpo inicialmente rígido de alguma forma redistribua sua massa em relação a esse
angular
14
Cap. 12.
Momento Angular
eixo de rotação, variando seu momento de inércia em torno desse eixo. Uma vez que o momento
angular do corpo não pode mudar, escrevemos essa lei de conservação como
If ωf = Ii ωi .
ω
(12.24)
Aqui os índices i e f se referem aos valores do momento de inércia I e da velocidade angular
.
antes e depois da redistribuição de massa
Um disco de md = 2, 0 kg e de raio desprezível se move a vdi = 3, 0 m/s e
atinge uma haste de ms = 1, 0 kg e d = 4, 0 m de comprimento que está sobre uma superfície
horizontal de gelo, portanto sem atrito, como mostra a vista de cima na Fig.(12.10a). O disco
colide perpendicularmente a haste na sua extremidade. Considere que a colisão é elástica. O
momento de inércia da haste em torno do seu centro de massa é I = 1, 33 kg m2 . (a) Explicar
por que as grandezas momentos linear e angular e energia cinética do sistema é constante. (b)
Encontre as velocidades linear do disco vdf , linear da haste vs e angular da haste ω após a colisão.
Exemplo 5:
Ignora-se o som produzido na colisão e como não há atrito entre as superfícies dos
corpos envolvidos, então o disco e a haste formam um sistema isolado em termos de momento
linear e momento angular. Por outro lado a colisão é elástica, logo a energia é constante.
(b) Escrevemos as equações das três grandezas que se conservam: o momento linear,
Solução (a)
md vdf + ms vs = md vdi ;
(12.25)
o momento angular com sinal de rotação no sentido horário,
−r md vdf − I ω = −r md vdi ;
(12.26)
e r = d/2 e a energia cinética antes e após a colisão se conserva:
2
2
md vdf
ms vs2 I ω 2
md vdi
+
+
=
.
2
2
2
2
(12.27)
As três equações possuem as três incógnitas do problema. Manipulando-as algebricamente,
encontramos
vs =
2vdi
= 1, 3 m/s;
1 + ms /md + r2 ms /I
ω=
r m s vs
= 2, 0 rad/s;
I
vdf = vdi −
ms
vs = 2, 3 m/s.
md
12.4.
Conservação do Momento Angular
15
Figura 12.10: Vista de cima de um disco colidindo com uma haste. (a)
Antes da colisão, o disco colide perpendicularmente com a haste. Após
a colisão (b) a haste gira e translada para a direita.
Observações Este é um exemplo em que as três grandezas envolvidas no fenômeno de co-
lisão entre os corpos rígidos se conservam. O aluno deve se acostumar a expressar as respostas
literalmente e somente depois utilizar os valores numéricos. Por exemplo, mostre que vdf ≈ −vdi
se ms >> md .
Na vista de cima, Fig.(12.11), quatro hastes nas e uniformes, cada uma com
massa M e comprimento d = 0, 50 m, estão rigidamente conectadas a um eixo vertical formando
uma roleta. A roleta gira em sentido horário em torno do eixo, o qual está preso ao piso, com
módulo da velocidade angular inicial ωi = 2, 0 rad/s. Uma bola de argila de massa m = M/3 e
velocidade inicial vi = 12 m/s é lançada ao longo da trajetória mostrada, θ = 60o , e se gruda na
extremidade de um das hastes. (a) Discuta sobre a conservação ou a não das seguintes grandezas:
o momento linear, a energia cinética e o momento angular do sistema. (b) Qual é a velocidade
angular após a colisão , ωf , do sistema bola-roleta?
Exemplo 6:
A colisão é totalmente inelástica (argila gruda na haste), logo a energia cinética
do sistema não se conserva. O momento linear total não é conservado, pois durante a colisão uma
força externa atua sobre a roleta no ligamento do eixo com o piso. Esta a força evita que a roleta
se desloque sobre o piso ao ser atingido pela bola de argila. As forças que agem sobre as hastes
são a força de reação da superfície horizontal sobre a haste e a força gravitacional que se cancelam
e a força de atrito é nula. Portanto, o torque externo total é nulo e o momento angular total do
⃗ , em torno do eixo que passa pelo pino é conservado. As forças envolvidas na colisão
sistema, L
produzem apenas torques internos que se cncelam e a força que atua no eixo de rotação possui
braço de momento da força nulo.
(b) Usando a lei de conservação do momento angular, escrevemos
Solução (a)
Lrol,f + Lb,f = Lrol,i + Lb,i .
16
Cap. 12.
Momento Angular
Figura 12.11: Uma vista de cima de quatro hastes rigidamente conectadas girando livremente em torno do
eixo central e a trajetória da bola de argila.
onde os índices i e f denotam os instantes antes e após a colisão da bola de argila com a haste.
Cada termo é apresentado a seguir. Primeiramente, pode-se considerar que o eixo de rotação
se localiza na extremidade das quatro hastes que se unem cuja inércia rotacional do conjunto é
IO = 4(M d2 /3). Pode-se, ainda, supor que a roleta é formada por duas hastes de massa 2M e
comprimento 2 d cada. Nesse caso, o eixo de rotação passa pelo centro da nova haste formada e
a inércia rotacional do conjunto é
IO = 2
2 M (2 d)2
M d2
=4
.
12
3
A roleta inicailmente gira no sentido horário, ou sentido negativo (ω
⃗ = −ωi k̂ ):
4
Lrol,i = −Io ωi = − M d2 ωi ,
3
4
Lrol,f = Io ωf = M d2 ωf ;
3
(12.28)
A bola, sendo uma partícula, expressamos como
Lb,i = m d vi cos 60o ,
Lb,f = m d2 ωf .
(12.29)
Substituindo-as na equação acima, obtemos a expressão da velocidade angular:
ωf =
1
(−4 d ωi + vi cos 60o )
5d
O valor numérico é obtido:
ωf = 0, 8 rad/s.
(12.30)
12.4.
Conservação do Momento Angular
17
O sistema bola mais a roleta gira no sentido anti-horário.
Exemplo 7:
Um carrossel de raio R está girando com velocidade angular ωo , no sentido
horário, em torno de um eixo vertical que passa pelo centro do carrossel e sem atrito. Uma criança
corre numa linha reta tangente à borda da plataforma, com velocidade vc e pula na borda do
carrossel, conforme a Fig.(12.12). (a) Quais grandezas se conservam: momento linear, momento
angular e energia cinética? Explicar a resposta. (b) Qual a velocidade angular que adquire o
carrossel? (b) Uma vez a criança no carrossel, ela caminha em linha radial (em direção ao centro
da plataforma). Calcular a nova velocidade angular que adquire o carrossel.
Quando a criança pula no carrossel, provoca um impulso linear (∆ p) na direção
tangente à borda do carrossel. Em resposta a esse impulso linear, o eixo do carrossel responde em
forma de uma força (F = ∆p/∆t), impedindo que o carrossel tenha o movimento de translação.
Dessa forma, o momento linear não se conserva.
A energia cinética não se conserva uma vez que a colisão entre a criança e o carrossel é uma
colisão totalmente inelástica.
Não existe atrito no eixo do carrossel e, consequentemente, não há torque no eixo. Concluímos
que o momento angular se conserva em relação ao eixo que passa pelo eixo do carrossel.
(b) Momento angular inicial:
Li = −I ω0 + mR vc .
Solução (a)
O momento angular após a criança pular no carrossel:
Lf = (m R2 + I)ωf .
(12.31)
Pela conservação do momento angular, Lf = Li , obtemos
m R v c − I ω0
(12.32)
m R2 + I
a velocidade angular do carrossel, notadamente menor do que ω0 .
(c) O momento de inércia da criança é nulo quando ela chega no centro do carrossel. Escrevemos
a nova expressão para a conservação do momento angular,
ωf =
I ωcc = (m R2 + I) ωf
e encontramos
(12.33)
m R vc − I ω 0
(m R2 + I)
=
ωf .
I
I
Foi utilizada a expressão de ωf dada pela Eq.(12.32). Verica-se a velocidade angular do sistema,
criança no centro, é maior do que quando ela estava na borda.
Obs. Explicação sobre a energia cinética antes e depois de a criança caminhar para o centro
do carrossel. Quando a criança está na borda do carrossel:
ωcc =
Kborda =
(m R2 + I) ωf2
Ii ωf2
=
2
2
18
Cap. 12.
Momento Angular
Quando a criança está no centro do carrossel:
Kcentro =
2
I ωcc
I (m R2 + I)2 2
=
ωf
2
2 I2
Kcentro =
(m R2 + I)
Kborda .
I
Verica-se que a energica cinética do sistema aumenta quando a criança caminha para o
centro do carrossel. A criança realiza trabalho ao se mover para o centro do carrossel (eixo de
rotação). Essa energia cinética extra provem do trabalho realizado pela criança. O trabalho é
positivo, pois a força de atrito entre a criança e a superfície do carrossel, em direção ao eixo de
rotação, é a reação da força impulsiva dos pés sobre a superfície do carrossel e o deslocamento
é em direção ao centro. Essa energia é, em parte, proveniente da energia potencial química do
corpo da criança. O sistema é isolado em termos de energia, mas um processo de tranasformação
dentro do sistema converte a energia potencial ( energia interna) em cinética.
Figura 12.12: Carrossel girando no sentido horário e a
menina pula na borda da plataforma .
Um professor de física está sentado em um banco giratório em torno de um eixo
vertical sem atrito com velocidade angular ωi , Fig.(12.13). O professor tem os braços distentidos
e segura um haltere em cada mão, de modo que o momento de inércia do sistema (professor,
assento e halteres) é Ii . Ele puxa rapidamente os halteres para si, de modo que o momento de
inércia nal do sistema é um terço do momento de inércia inicial: If = Ii /3. (a) Qual é sua
velocidade angular nal? (b) Compare as energias cinéticas nal e inicial do sistema. Despreze
o torque devido ao atrito no eixo do banco durante o intervalo de tempo no qual o momento de
inércia do sistema varia. (c) Qual é a origem do aumento ou da dimuição da energia cinética do
sistema?
Exemplo 8:
12.5.
19
Impulso Angular
Como o torque devido ao atrito no eixo do banco é desprezível e não há torques
externos sobre o sistema, logo seu momento angular é conservado:
Ii
Ii ωi = If ωf = ωf .
3
Resolvendo em relação a ωf temos:
ωf = 3 ωi .
Solução (a)
Verica-se que a conservação do momento angular exige o aumento da velocidade angular, seja o
mesmo que a diminuição do momento de inércia.
(b) A energia cinética nal do sistema é:
1
1 Ii
Kf =
If ωf2 = ( )(3ωi )2
2
2 3
1
= 3( Ii ωi2 ) = 3 Ki .
2
Assim, a energia cinética do sistema aumenta.
(c) O aumento da energia cinética, ou seja, variação positiva dessa energia, ∆ K > 0, é igual
ao trabalho (positivo) realizado pelo professor ao aproximar os halteres ao seu tronco. A força
aplicada pelo professor sobre os alteres é radial e centrípeta. O trabalho realizado é positivo porque
o deslocamenteo é, também, radialmente em direção ao centro (eixo de rotação).
Figura 12.13: Professor em um banco giratório.
12.5
Impulso Angular
Quando um torque τ atua num corpo de momento de inércia I constante, durante o tempo t1 a
t2 , a velocidade angular varia de ω1 a ω2 , escrevemos
dω
τ =Iα=I
,
dt
∫
∫
t2
ω2
τ (t) dt =
t1
ω1
I dω = I ω2 − I ω1 = ∆ L
(12.34)
20
Cap. 12.
A integração de torque no tempo durante o qual ele atua é chamado
torque, denotado por Jθ :
∫ t2
Jθ =
τ (t) dt = ∆ L.
Momento Angular
impulso angular do
(12.35)
t1
Esta grandeza é o análogo rotacional do impulso linear de uma força. A Eq.(12.35) arma que
o impulso angular que atua sobre um corpo é igual à variação no seu momento angular em
relação ao mesmo eixo.
Um grande torque que atua apenas durante um curto intervalo de tempo é chamado torque
impulsivo.
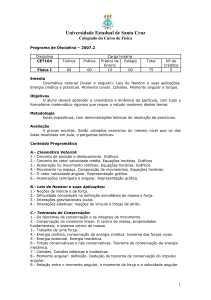
Uma força dependente do tempo, F (t), atua num intervalo de tempo muito
pequeno, sobre um corpo rígido que possui momento de inércia I, Fig.(12.14). Mostre que
∫
τ dt =< F > b∆t = I(ωf − ωi )
Exemplo 9:
onde b é o braço do momento da força; < F > é o valor médio da força durante este intervalo
de tempo; ωi (ωf ) é a ∫velocidade angular imediatamente antes (após) da aplicação (remoção ) da
força. ( A quantidade τ dt denomina-se impulso angular que corresponde a uma grandeza linear
análoga denominado impulso linear.)
Figura 12.14: Força
intervalo de tempo.
Solução
F (t)
age sobre um corpo rígido num curto
12.5.
21
Impulso Angular
Seja
⃗τ =
⃗
dL
dt
e fazendo a integração no tempo
∫
∫
⃗ =L
⃗f − L
⃗ i = I(⃗ωf − ω
⃗τ dt = dL
⃗ i ).
(12.36)
∫
⃗ impulso angular e é igual à variação do momento angular. Um corpo rígido
Denomina-se Ldt
é submetido a uma força que varia com o tempo:
⃗τ = ⃗r × F⃗ (t)
ou
τ = r F senθ.
Seja b = r senθ o braço do torque. Escrevemos
∫
∫
τ dt =
∫
b F (t) dt = b
F (t) dt = b < F > dt
onde < F > é o valor médio da força no intervalo de tempo ∆ t, tempo de duração da ação da
força F (t). Temos
τ =I
e escrevemos
∫
∫
τ dt =
dω
dt
dω
I
dt = I
dt
∫
dω = I(ωf − ωi ).
Finalmente,
I(ωf − ωi ) = b < F > dt.
q.e.d