Aula do cap. 10
Rotação
Conteúdo da 1ª Parte:
• Corpos rígidos em rotação;
• Variáveis angulares;
• Equações Cinemáticas para
• aceleração Angular constante;
• Relação entre Variáveis Lineares e Angulares;
Referência:
• Halliday, David; Resnick, Robert & Walker, Jearl. Fundamentos de Física,
Vol 1. Cap. 11 da 6a. ed. Rio de Janeiro: LTC, 1996.
• Tipler, Paul. Física, Vol 1 cap. 9. 4a. ed. Rio de Janeiro: LTC, 2000.
O corpo rígido
•O corpo rígido é aquele
no qual a distância entre
duas partículas quaisquer
é fixa!
r
rA = (x A , y A , z A )
r
rB = (xB , y B , z B )
r
rA
r
rB
θ
Ângulo de rotação
( x A − xB ) + ( y A − y B ) + ( z A − z B ) = r
2
2
2
2
• estamos interessados em estudar a rotação de um corpo
rígido em torno de um eixo fixo
Variáveis rotacionais
• a linha de referência é perpendicular ao eixo de rotação e fixa ao corpo. O seu
deslocamento define o ângulo de rotação do corpo rígido.
ẑ
• o sentido da rotação é dado pela regra
da mão direita.
ŷ
x̂
Linha de
referência
Δθ
Um corpo rígido girando em torno de um eixo fixo possui apenas duas
possibilidades de rotação: no sentido horário (-) ou anti-horário (+). O sentido
do vetor velocidade angular é dado pela regra da mão direita: " Posiciona-se a
mão direita aberta com os dedos maiores no mesmo sentido da rotação do
disco. Então, o polegar indicará o sentido do vetor velocidade angular."
Variáveis rotacionais
• cada ponto do corpo rígido executa movimento circular
•Em geral as rotações em um plano podem ser facilmente
descritas por um ângulo e um intervalo de tempo.
•Considere o comprimento S do segmento de um círculo (arco)
contido em ângulo θ. Se o círculo tem um raio r, o comprimento
de sua circunferência é dado por L = 2 π r.
t2
r
a)
t1
θ1
θ
S
θ2
o
S=θr
b)
"Relação 1 rad = 57,3o ou 2π rad = 360o.
x
Variáveis rotacionais
r
r = (x , y)
Velocidade tangencial
r
Δs 2πr
Δθ =
=
= 2π rad
r
r
Vetor velocidade v, no MCU, tem
módulo constante, sendo tangente a
trajetória em cada ponto.
v = distância percorrida = 2π r
tempo gasto
t
Unidade: m/s
rΔθ
v=
=rω
Δt
O tempo necessário para percorrer uma volta completa, chama-se
período do movimento. O inverso do período é a freqüência do
movimento.
Variáveis rotacionais
A velocidade angular média (ω) do corpo, no intervalo entre t1 e t2, é
definida como a razão entre o deslocamento angular
dθ = θ2 - θ1 , e o intervalo de tempo dt = t2 - t1 :
Δθ
ω=
Δt
2π
ω=
T
ω = 2π F
A coordenada angular que descreve a posição de um corpo
na trajetória circular (MCU) pode ser dada por:
θ = θo + ω t
Em uma volta completa o ângulo é 2π rad.:
Δs 2πr
Δθ =
=
= 2π rad
r
r
Variáveis rotacionais
V1 = 2πR1
T
V2= 2πR2
T
ω1 = ω2 = 2π
T
T 1 = T2 e
f1 = f2
Variáveis rotacionais
Velocidade Angular Instantânea:
A velocidade angular instantânea ω é definida como o limite
de ω para o qual dt tende → 0 dt aproxima-se de zero :
ω = lim Δθ = dθ(t)
Δt -0
Δt
dt
Unidade:
É o radiano por segundo ( 1rad/s).
Outras unidades:
rotações por minuto (r.p.m.)
ou 1 r.p.s. = 2π rad/s.
Variáveis rotacionais
Força centrípeta provoca a
aceleração centrípeta no
Movimento Circular
v2
ac =
= ω .v
r
v=rω
aceleração angular média é definida como:
α = Δω
Δt
A unidade de aceleração angular é 1 rad/s2 = 1/s2.
aceleração angular instantânea a é definida como limite desta
razão quando Δt tende a zero :
α = lim Δω =
Δt -0 Δt
d2θ
dt2
Variáveis rotacionais
Principais Equações
Movimento com
Movimento com aceleração
aceleração linear constante
angular constante
a = constante
α = constante
v = vo + at
w = wo + α t
θ = θo + wo t + 1/2 α t2
x = xo + vot + 1/2 at2
Relação entre Variáveis Lineares e Angulares:
V=wr
at = r α
ac =
v2 =
r
w2 r = w v
Δϕ
Será um vetor ? Na figura abaixo aplicam-se dois deslocamentos
angulares de 90º a um livro inicialmente na horizontal; primeiro a rotação em
torno do eixo x e depois a rotação em relação ao y. Inverte-se os deslocamentos
angulares no segundo caso, isto é, primeiro rotação em y depois em x. O livro
acaba chegando a diferentes orientações no final. Portanto, a soma de dois
deslocamentos angulares depende da ordem em que é efetuada, eliminando a
possibilidade de eles serem vetores.
exemplo
Δϕ
não é um
vetor !
rotações sucessivas de um livro pag. 208.
Lembrando, para as variáveis lineares...
O cálculo de θ(t) a partir de ω(t)
t
θ − θ 0 = ∫ ω(t ) dt
t0
O cálculo de v(t) a partir de a(t)
t
ω − ω0 = ∫ α(t ) dt
t0
•
•
•
•
Resumo dos Conceitos
Problema direto,
– x(t) →(derivada) → v(t)
– v(t) →(derivada) → a(t)
Problema inverso
– a(t) →(integral) → v(t)
– v(t) →(integral) → x(t)
Quem fez?
Newton
Variáveis rotacionais
Exemplo
Cálculo da velocidade angular da Terra em torno do seu eixo
A Terra completa uma revolução a cada
23h56min (dia sideral).
O módulo da sua velocidade angular é
2π rad 6,28 rad
− 5 rad
ω=
=
= 7,289 ×10
86160 s
dia
s
e a sua direção aponta para o
norte ao longo do eixo de rotação.
r
ω
Aula do cap. 10
Energia Cinética na
Rotação
Conteúdo 2ª Parte:
• Energia Cinética de Rotação e
• Momento de Inércia.
• Definição de Torque.
• Trabalho e Potência no Movimento Rotacional.
Referência:
• Halliday, David; Resnick, Robert & Walker, Jearl. Fundamentos de Física, Vol 1.
Cap. 11 da 6a. ed. Rio de Janeiro: LTC, 1996.
• Tipler, Paul. Física, Vol 1 cap. 9. 4a. ed. Rio de Janeiro: LTC, 2000.
Energia Cinética na Rotação
A Energia cinética total de um corpo em rotação é a soma
das energia cinéticas de todas as partículas que constituem
o corpo.
energia cinética translacional
Kt = 1/2 mv2
energia cinética rotacional
(rotação) Kr = ?
Energia Cinética na Rotação
Energia cinética de translação Kt = 1/2 mv2
substituindo v = wr
cada partícula m do corpo K = 1/2 m(wr)2
Kr= 1/2 ( Σmr2 ) w2
A grandeza Σmr2 é denominada Inércia à
rotação - momento de inércia
I = Σ m r2
Momento de Inércia
energia cinética translacional
Kt = 1/2 mv2
energia cinética rotacional
(rotação)
Kr = 1/2 I w2
Exemplo: Quatro partículas de massa m, estão ligadas por hastes de
massa desprezível formando um retângulo de lados 2a e 2b. O sistema
gira em torno de um eixo no plano da figura. Calcular o momento de
inércia, nas situações apresentadas.
Momento de Inércia:
I = Σ m r2 = m1 r12 + m2 r22 + m3 r32 + m4 r42
I = m a2 + m a2 + m a2 + m a2 = 4ma2
I =
2
4ma
Momento de Inércia:
I = Σ m r2 = m1 r12 + m2 r22 + m3 r32 + m4 r42
I = m 02 + m 02 + m (2a)2 + m (2a)2 = 8ma2
I = 8ma2
Cálculo do Momento de Inércia:
Anel homogêneo de massa M e densidade linear λ
M
M
λ=
⇒ dm =
R/ dϕ
2π R
2π R/
dϕ dl = R dϕ
R
Aro
2π
M
I = ∫ R dm = ∫ R
dϕ = MR 2
2π
0
2
2
Cilindro ou Disco homogêneo de massa M e densidade superficial σ
M
M
⇒ dm =
2π/ r dr
σ=
2
2
πR
π/ R
dr
4 R
R
2M
2M r
I = ∫ r dm = ∫ r
r dr = 2
2
R
R 4
0
2
R
2
0
r
ds = 2π r dr
1
= MR 2
2
Tabela de momentos de inércia
Ver tabela 11.2 pag. 213 Halliday 6ª ed.
O teorema dos eixos paralelos
Lista 20 exercício2)
I = I CM + Mh
2
a) Calcule o momento de inércia de uma barra delgada de ferro
de 2 m de comprimento e 8,7 kg de massa, em torno de um eixo
perpendicular à barra e localizado a 30 cm do centro da barra.
b) O momento de inércia é uma grandeza escalar ou vetorial e
qual sua unidade?
h
CM
.
O trabalho e Energia cinética no
deslocamento angular
1
1
2
2
⇒ ΔW = I ω f − I ω i
2
2
O trabalho total é igual à variação da energia
cinética de rotação.
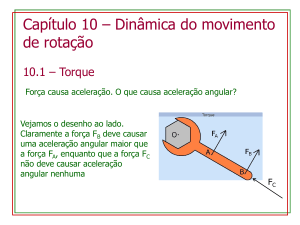
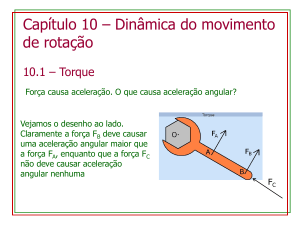
Torque
• Para deslocarmos um corpo sobre uma superfície
aplicamos uma força sobre ele. Agora, se quisermos
girar um corpo ao redor de um ponto ou de um eixo
devemos aplicar-lhe um torque. O torque tende a girar
ou mudar o estado de rotação dos corpos,
representando o efeito girante de uma força.
F
F
Eixo de rotação
Torque
• Para aplicar um torque a força deve ser exercida em
um ponto que não coincida com o eixo de rotação e
numa direção que não coincida com o raio de giro.
Torque e braço de uma força.
Torque
O efeito girante de uma força ou torque depende de duas
coisas:
- da intensidade da força aplicada;
- do comprimento do braço da força.
Força
Força
Força
Imagem: conviteafisica.com.br
Torque
Forças de mesmo módulo/ torques diferentes
F4
Eixo de rotação
F3
F5
F1
Giro no sentido horário torque
F2
-
Giro no sentido anti-horário torque +
Torque
• Definimos o torque como sendo o produto
da força pelo comprimento de seu braço. F
Torque τ = r x F.
θ
r
braço da força
r sen θ
Torque τ = r x F = F r senθ
Eq. 11.31
O braço da força r senθ é a menor distância entre a direção da
força aplicada e o eixo de rotação. Ele é obtido tomando a
distância do ponto de rotação perpendicular à direção da força.
F
Torque
θ
r
braço da força
r sen θ
Torque τ = r x F = F r senθ
F
r
O braço da força r é a menor distância
entre a direção da força aplicada e o
eixo de rotação. Ele é obtido tomando
a distância do ponto de rotação
perpendicular à direção da força.
Eixo
Braço da força = r sen90º = r
Torque Vetor
Torque como produto vetorial
τ =r x F
Podemos calcular o produto vetorial entre vetores é através do
determinante de uma matriz. Efetuar τ = r x F .
r = 3m i + 4mj + 5m k
e F = 2N i + 3Nj - 1N k
i j k
2 3 − 1 = (15 + 4) ⋅ i + (−3 − 10) ⋅ j + (8 − 9) ⋅ k = 19 i − 13 j − 1 k
3 4 5
= 19 i − 13 j − 1 k
τ
Trabalho e Potência no Movimento Rotacional
Uma força aplicada a um corpo em rotação realiza trabalho
sobre o corpo. Este trabalho pode ser expresso em termos do
torque da força e do deslocamento angular.
dw = F . ds = F r dθ = τ dθ
ds = dθ r
• Onde grandeza τ = r F é o torque, que na forma vetorial :
θf
W = ∫ τ dθ
θi
τ =r x F
Potência no Movimento Rotacional
• Voltando a potência relacionado como movimento
rotacional podemos escrever:
dw = F . ds = F r dθ = τ dθ
Pot = dw = τ dθ
dt
dt
ou
Pot = τ ω
Eq. 11.47
isto é, a potência instantânea é igual ao produto do torque pela
velocidade angular instantânea.
• Resultado análogo ao caso linear P = Fv.
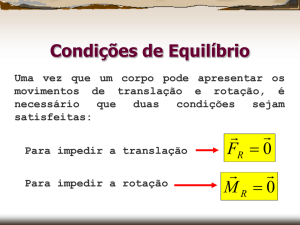
A segunda Lei de Newton para a rotação
A segunda Lei de Newton toma uma forma peculiar
quando aplicada aos movimentos que envolvem rotação.
F = ma
Torque τ = r x F
e
τ=Iα
a = αr
Exercícios
1) Uma bicicleta é montada de modo que a roda traseira possa
girar livremente. A corrente aplica uma força de 18 N ao pinhão
de força, a uma distância rPINHÃO = 7 cm do eixo da roda.
Considere que a roda seja um aro (I = MR2) de raio R = 35 cm e
massa M = 2,4 kg.
Qual a velocidade angular
da roda depois de 5 s?
Resposta exercício 1)
Exercício 2)
Um corpo de massa m está pendurado em uma corda que passa
por uma polia cujo momento de inércia em relação ao próprio
eixo é I e o raio e R. A polia tem rolamento sem atrito e a corda
não escorrega pela sua borda.
Calcular a tensão na corda e
a aceleração do corpo.
Resposta do exercício 2)
Exercício Resolvido
Máquina de Atwood com uma polia com massa
Massa 1
∑ Fy = m1 g − T1 = m1a
Massa 2
∑F
y
= T2 − m2 g = m2 a
∑τ = T1 R − T2 R = Iα =
Polia
1
1
1
2 a
= MR
= MRa ⇒ T1 − T2 = Ma
R 2
2
2
Então
⎛
⎞
⎟
⎜ m −m
1
2
⎟g
a =⎜
⎜⎜ m + m + 1 M ⎟⎟
2
⎝ 1
2 ⎠