UNIVERSIDADE FEDERAL DO PARANÁ
JOÃO LUIZ GLOVACKI GRANEMAN DE MELO
PROJETO E IMPLEMENTAÇÃO DE UM FILTRO ATIVO PARALELO
MONOFÁSICO PARA CORREÇÃO DE DISTORÇÃO HARMÔNICA
DE CORRENTE
CURITIBA
2013
JOÃO LUIZ GLOVACKI GRANEMAN DE MELO
PROJETO E IMPLEMENTAÇÃO DE UM FILTRO ATIVO PARALELO
MONOFÁSICO PARA CORREÇÃO DE DISTORÇÃO HARMÔNICA
DE CORRENTE
Trabalho de Conclusão de Curso apresentado
à disciplina Projeto de Graduação, como
requisito parcial à conclusão do curso de
Engenharia Elétrica, Setor de Tecnologia,
Universidade Federal do Paraná
Orientador: Prof. Dr. João Américo Vilela
Júnior
CURITIBA
2013
JOÃO LUIZ GLOVACKI GRANEMAN DE MELO
Título: PROJETO E IMPLEMENTAÇÃO DE UM FILTRO ATIVO PARALELO
MONOFÁSICO PARA CORREÇÃO DE DISTORÇÃO HARMÔNICA DE CORRENTE
Trabalho de Conclusão de Curso apresentado como exigência parcial para obtenção do
grau de Engenheiro Eletricista com ênfase em Telecomunicações/Eletrônica, à Universidade
Federal do Paraná.
Data: 11 de dezembro de 2013
Prof. Dr. João Américo Vilela Junior
Orientador
Departamento de Engenharia Elétrica, UFPR
Prof. Dr. Ivan Eidt Colling
Departamento de Engenharia Elétrica, UFPR
Prof. Dr. Rogers Demonti
Departamento de Engenharia Elétrica, UFPR
Dedico este trabalho aos meus pais
Luis e Doralice, minhas referências, por toda a
educação e apoio que me dedicaram.
Sem eles, não teria conseguido
chegar até aqui.
“Se faltam máquinas, você pode
comprá-las. Se não há dinheiro, você toma
emprestado. Mas homens você não pode comprar,
nem pedir emprestado. E homens motivados por
uma ideia são a base do êxito."
— Eggon João da Silva
AGRADECIMENTOS
A Deus, pelo dom da vida.
Ao Prof. João Américo pela oportunidade concedida, orientação, apoio e incentivo,
além de todos os ensinamentos transmitidos que foram de grande valia para a conclusão desse
trabalho.
Aos colegas de faculdade: André “Pernambuco”, Daniel Ussuna, Douglas Prost,
Eugênio Heiss, Gilson Eggert, Ivanderson de Oliveira e Tiago Vinícius, pelo apoio, pelas
inúmeras horas de estudo e pelos momentos de lazer e descontração. E a todos os demais
colegas que de alguma forma contribuíram para que eu chegasse aqui hoje.
Aos colegas de estágio, SE Acesso GVT, R&D da Siemens Enterprise e R&D da
Landis Gyr, que sem sobra de dúvida foram fundamentais para meu crescimento e
desenvolvimento tanto pessoal quanto profissional.
Por fim agradeço à minha família e a minha namorada Viviane por todo o apoio,
compreensão e paciência.
vi
RESUMO
Este Trabalho de Conclusão de Curso apresenta o projeto e implementação um Filtro
Ativo Paralelo (FAP), controlado de forma digital com vistas à redução do conteúdo
harmônico de cargas não lineares advindas da rede elétrica com potência aparente de até
1kVA. O FAP funciona como uma fonte de corrente controlada, injetando/drenando corrente
no ponto onde está conectado, de forma que a corrente drenada da fonte pelo FAP mais a da
carga seja idealmente senoidal.
Primeiramente é realizado um breve estudo sobre as cargas não lineares e filtros
ativos, e as suas influências na qualidade da energia da rede. Em seguida será apresentada a
estrutura do FAP com sua modelagem matemática, a técnica de controle e modulação
utilizada.
Posteriormente são descritas as etapas da construção física do protótipo, apresentando
os cálculos para dimensionamento da carga não linear, banco de capacitores, indutores, placas
auxiliares e os sensores.
Na sequência será apresentado o desenvolvimento do controle digital e do firmware
implementado posteriormente no microcontrolador. Por último são mostrados os resultados
obtidos nos testes funcionais do protótipo.
vii
ABSTRACT
This work of course completion presents the design and implementation of one
Parallel Active Filter (FAP), digitally controlled in order to reduce the harmonic content of
nonlinear loads arising from the power grid with up to 1 kVA. The FAP serves as a current
source controlled by injecting/draining stream at the point where it is connected, so that the
current drawn from the source by the load plus the FAP is ideally sinusoidal.
First a brief study of non-linear loads and active filters, and their influences on the
quality of the power grid is performed. In the sequence will be presented the structure of FAP
with its mathematical modeling, technical control and modulation used.
Later stages of the physical construction of the prototype are described, presenting
calculations for sizing the nonlinear load, capacitors, inductors, sensors, and accessory cards.
In the sequence will be presented in the development of digital control firmware
implementation on a microcontroller. Finally the results obtained are shown in the functional
tests of the prototype.
viii
SUMÁRIO
RESUMO.................................................................................................................................. vi
ABSTRACT ............................................................................................................................ vii
LISTA DE FIGURAS.............................................................................................................. xi
LISTA DE TABELAS ........................................................................................................... xiv
LISTA DE SIGLAS ................................................................................................................ xv
LISTA DE SÍMBOLOS ........................................................................................................ xvi
1.
INTRODUÇÃO ................................................................................................................. 1
2. CARGAS NÃO LINEARES, FILTROS ATIVOS E A QUALIDADE DA ENERGIA
ELÉTRICA ............................................................................................................................... 5
2.1
A Qualidade da Energia Elétrica ............................................................................. 5
2.1.1
3.
Harmônicos ........................................................................................................... 6
2.2
As Cargas não Lineares ............................................................................................. 7
2.3
Filtros Ativos .............................................................................................................. 8
2.3.1
Classificação dos Filtros Ativos ........................................................................... 9
2.3.2
Filtro Ativo Paralelo ........................................................................................... 10
ESTRUTURA DO FAP, MODULAÇÃO E ESTRATÉGIAS DE CONTROLE ...... 12
3.1
Estrutura do Filtro Ativo Paralelo ......................................................................... 12
3.2
Modulação a Três Níveis ......................................................................................... 13
3.3
Estratégia de Controle ............................................................................................. 14
3.3.1
Modelagem do Inversor ...................................................................................... 16
3.3.2
Malha de Corrente .............................................................................................. 16
3.3.3
Malha de Tensão ................................................................................................. 17
ix
4.
5.
7.
PROJETO DOS ELEMENTOS PASSIVOS DO FAP ................................................ 20
4.1
Especificação do FAP .............................................................................................. 20
4.2
Projeto ....................................................................................................................... 21
4.2.1
Projeto da Carga ................................................................................................. 21
4.2.2
Indutor do FAP ................................................................................................... 22
4.2.3
Banco de Capacitores do FAP ............................................................................ 27
PROJETO DOS ELEMENTOS DE CONTROLE DIGITAL .................................... 29
5.1
FTMA de Corrente .................................................................................................. 30
5.2
Projeto do Compensador de Corrente Digital ...................................................... 31
5.3
Projeto do Compensador de Tensão Digital .......................................................... 35
COMPONENTES E CIRCUITOS AUXILIARES ...................................................... 41
7.1
FRDM-KL25Z ARM Cortex M0+ ......................................................................... 42
7.2
Sensor de Corrente ACS712 ................................................................................... 43
7.3
Senoide de Referência .............................................................................................. 44
7.4
MOSFET IRFP460 .................................................................................................. 45
7.5
Driver IR2104 ........................................................................................................... 45
7.6
Indutor
7.7
Banco de Capacitores FAP (
7.8
Banco de Capacitores da Carga
7.9
Circuito de Partida Suave (InRush) ....................................................................... 50
. ................................................................................................................ 46
.............................................................................. 49
.................................................................... 49
7.10 Fonte Auxiliar .......................................................................................................... 51
7.11 Buffer......................................................................................................................... 53
7.12 Filtro Anti-Aliasign .................................................................................................. 54
x
8.
9.
RESULTADOS OBTIDOS ............................................................................................ 55
8.1
Montagem do Protótipo........................................................................................... 55
8.2
Simulação do FTMF da Corrente e Tensão .......................................................... 60
8.3
Implementação do Protótipo................................................................................... 62
8.3.1
Nova Malha de Corrente..................................................................................... 63
8.3.2
Nova Malha de Tensão ....................................................................................... 66
CONCLUSÕES E PERSPECTIVAS ............................................................................ 69
REFERÊNCIAS ..................................................................................................................... 71
APÊNDICE A - Script MatLab Malha de Corrente............................................................ 76
APÊNDICE B - Script MatLab Malha de Tensão ............................................................... 77
APÊNDICE C – Firmware Controle Digital PSIM ............................................................. 78
APÊNDICE D – Diagrama Esquemático Entrada_127AC ................................................ 80
APÊNDICE E – Diagrama Esquemático RC_Load ............................................................ 81
APÊNDICE F – Diagrama Esquemático DC_Power_Supply ............................................ 82
APÊNDICE G – Diagrama Esquemático Controle ............................................................. 83
APÊNDICE H – Diagrama Esquemático Senoide Referência e Sensor de Corrente ...... 84
APÊNDICE I – Diagrama Esquemático Inversor ............................................................... 85
APÊNDICE J – ProcessorExpert.c ....................................................................................... 86
APÊNDICE K – Events.c ....................................................................................................... 89
APÊNDICE L – Tabela dos Custos dos Materiais do Protótipo ........................................ 90
xi
LISTA DE FIGURAS
Figura 1.1 – Forma de onda da corrente drenada pelo retificador com filtro capacitivo [4]...... 2
Figura 1.2 - Inversor de tensão (VSI). ........................................................................................ 3
Figura 1.3 - Inversor de corrente (CSI). ..................................................................................... 3
Figura 1.4 – Filtro ativo monofásico conectado paralelamente à rede e a carga não linear [4]. 4
Figura 2.1 – Retificador monofásico com filtro capacitivo. ....................................................... 7
Figura 2.2 – Tensão e corrente drenada da rede. ........................................................................ 8
Figura 2.3 - Filtro ativo série. ..................................................................................................... 9
Figura 2.4 – Filtro ativo paralelo. ............................................................................................... 9
Figura 2.5 – Princípio de funcionamento de um FAP. ............................................................. 10
Figura 2.6 - Corrente da rede, da carga e do FAP. ................................................................... 11
Figura 3.1 – Inversor de tensão em ponte completa (VSI-FB) [4]. .......................................... 13
Figura 3.2 – Modulação senoidal três níveis. ........................................................................... 14
Figura 3.3 – Monitoramento da corrente de rede. .................................................................... 15
Figura 3.4 – Diagrama de blocos da estrutura de controle. ...................................................... 15
Figura 3.5 – Estrutura de controle da malha de corrente. ......................................................... 16
Figura 3.6 – Diagrama de blocos para o controle da corrente do FAP..................................... 17
Figura 3.7 - Estrutura de controle da malha de tensão. ............................................................ 18
Figura 3.8 - Diagrama de blocos para o controle do FAP. ....................................................... 19
Figura 4.1 - Retificador monofásico de onda completa com filtro capacitivo. ........................ 21
Figura 4.2 - Tensão nos terminais ab do FAP. ......................................................................... 23
Figura 4.3 - Terminais a e b do Inversor de tensão em ponte completa [4]. ............................ 23
Figura 4.4 - Ondulação de corrente parametrizada [4]. ............................................................ 26
Figura 5.1 – FTMA da malha de corrente. ............................................................................... 30
Figura 5.2 – Diagrama de Bode do inversor e do filtro anti-aliasign. ..................................... 32
Figura 5.3 - Inserção dos ganhos da FTMA de corrente. ......................................................... 33
xii
Figura 5.4 – Ganho do compensador. ....................................................................................... 34
Figura 5.5 – Diagrama de Bode da FTMF de corrente. ............................................................ 34
Figura 5.6 – Gráfico do LR da FTMF de corrente do FAP com controle digital. .................... 35
Figura 5.7 - FTMA da malha de tensão. ................................................................................... 36
Figura 5.8 - Diagrama de Bode da FTMA de tensão................................................................ 37
Figura 5.9 – Ganhos associados a
. ................................................................ 37
Figura 5.10 – Inserção dos ganhos da FTMA de tensão. ......................................................... 39
Figura 5.11 – Ganho do compensador. ..................................................................................... 39
Figura 5.12 - Diagrama de Bode da FTMF de tensão. ............................................................. 40
Figura 5.13 - Gráfico do LR da FTMF de tensão do FAP com controle digital. ..................... 40
Figura 7.1 – Diagrama de blocos do protótipo do FAP. ........................................................... 41
Figura 7.2 - FRDM-KL25Z ARM Cortex M0+ [17]. .............................................................. 42
Figura 7.3 – Esquema de ligação do sensor de corrente ACS712 [20]. ................................... 43
Figura 7.4 – Circuito gerador da senoide de referência. .......................................................... 44
Figura 7.5 – Senoide de referência. ......................................................................................... 44
Figura 7.6 - Esquema de ligação do driver IR2104 [22]. ......................................................... 46
Figura 7.7 – Núcleo e carretel do tipo E [23]. .......................................................................... 46
Figura 7.8 – Banco de capacitores 600µF/420V. ..................................................................... 49
Figura 7.9 - Banco de capacitores 1500µF/200V. .................................................................... 49
Figura 7.10 – Circuito para acionamento do relé. .................................................................... 51
Figura 7.11 – Esquemático fontes auxiliares. ........................................................................... 52
Figura 7.12 –Buffer com AmpOp. ............................................................................................ 53
Figura 7.13 – Filtro anti-aliasign. ............................................................................................ 54
Figura 8.1 – Interruptor diferencial residual. ............................................................................ 55
Figura 8.2 – PCB da entrada AC com circuito de inrush. ........................................................ 56
Figura 8.3 – Fonte Auxiliar (Power Supply). ........................................................................... 56
Figura 8.4 – PCB controle. ....................................................................................................... 57
xiii
Figura 8.5 – PCB inversor. ....................................................................................................... 58
Figura 8.6 – Dimensionamento das trilhas de potência. ........................................................... 59
Figura 8.7 – Montagem final do protótipo do FAP. ................................................................. 59
Figura 8.8 – Simulação da malha de corrente e tensão do FAP controlado digitalmente. ....... 60
Figura 8.9 – Emulador do microcontrolador e PWM do PSIM................................................ 61
Figura 8.10 – Tensão da rede com a corrente de carga e a corrente gerada pelo FAP. ............ 61
Figura 8.11 – Tensão no banco de capacitores do FAP............................................................ 62
Figura 8.12 – Beans Processor Expert. .................................................................................... 62
Figura 8.13 – Setup para teste da malha de corrente. ............................................................... 64
Figura 8.14 – Corrente fornecida pelo FAP. ............................................................................ 64
Figura 8.15 – Corrente na carga não linear. ............................................................................. 65
Figura 8.16 – Corrente na carga linear. .................................................................................... 65
Figura 8.17 – Setup de teste do FAP. ....................................................................................... 66
Figura 8.18 – Tensão no barramento do protótipo. .................................................................. 67
Figura 8.19 – Corrente da carga não linear. ............................................................................. 67
Figura 8.20 – Corrente do FAP. ............................................................................................... 68
Figura 8.21 – Corrente da rede. ................................................................................................ 68
xiv
LISTA DE TABELAS
Tabela 4.1 - Especificação do FAP. ......................................................................................... 20
Tabela 4.2 - Especificação do retificador (carga proposta). ..................................................... 21
Tabela 4.3 – Parâmetros obtidos para o retificador. ................................................................. 22
Tabela 4.4 – Especificação dos componentes para o FAP. ...................................................... 28
Tabela 7.1 - Especificação do sensor de corrente ACS712. ..................................................... 43
Tabela 7.2 - Especificação do MOSFET IRFP460. ................................................................. 45
Tabela 7.3 - Especificação do driver IR2104. .......................................................................... 45
Tabela 7.4 – Parâmetro obtidos para a indutância
. ............................................................. 47
Tabela 7.5 - Especificação do relé SRD-S-12D ....................................................................... 51
Tabela 7.6 - Especificação do Amp Op LM324. ...................................................................... 53
xv
LISTA DE SIGLAS
Sigla
Significado
FAP
Filtro Ativo Paralelo
FAS
Filtro Ativo Série
THD
‘Total Harmonic Distortion’, Distorção Harmônica Total
PFC
‘Power Factor Correction’, Correção de Fator de Potência
VSI
‘Voltage Source Inverter’, Inversor de Tensão
FB-VSI
‘Full Bridge Voltage Source Inverter’, Inversor de Tensão em Ponte
Completa
CSI
‘Current Source Inverter’, Inversor de Corrente
CC
Corrente Contínua
CA
Corrente Alternada
FB
‘Full Bridge’, Ponte Completa
PWM
‘Pulse Width Modulation’, Modulação por Largura de Pulso
A/D
‘Analog-to-Digital’, Analógico-Digital
CI
Circuito Integrado
FTMA
Função de transferência de Malha Aberta
FTMF
Função de transferência de Malha Fechada
BP
Banda Passante
MF
Margem de Fase
AmpOp
Amplificador Operacional
RMS
‘Root-Mean-Square’, Média Quadrática
MOSFET
‘Metal-Oxide Semiconductor Field-Effetc Transistor’, Transistor de
Efeito de Campo
DSP
‘Digital Signal Processor’, Processador Digital de Sinais
MCU
Microcontrolador
PCB
‘Printed Circuit Board’, Placa de Circuito Impresso
FW
‘Firmware’
xvi
LISTA DE SÍMBOLOS
Unidade
Significado
compensador de corrente;
ganho do modulador PWM
função de transferência do inversor
ganho do sensor de corrente
ganho do divisor de tensão do sensor de corrente
ganho do filtro anti-aliasing
ganho do conversor A/D
referência da corrente
função de transferência da malha de corrente do inversor
função de transferência da planta de tensão
ganho do sensor de tensão
referência da tensão do barramento CC
Erro da malha de tensão
1
1. INTRODUÇÃO
A evolução tecnológica no campo da eletrônica tem propiciado inúmeros benefícios à
humanidade. Todos os dias, novos equipamentos e dispositivos eletrônicos são lançados no
mercado, tornando-se cada vez mais presentes e indispensáveis nas vidas das pessoas. Porém,
a grande e contínua proliferação destes equipamentos eletrônicos, tanto nas indústrias quanto
nas residências causam grande preocupação, uma vez que, por operarem de forma não linear,
drenam correntes distorcidas da rede elétrica. A eletrônica de potência tem um papel
fundamental neste processo, pois o processamento eficiente da energia é um tema de
relevância cada vez maior, em função da grande demanda de energia e dos aspectos
ambientais inerentes aos processos de geração.
Hoje em dia são apresentadas novas normas e recomendações [1] e [2], as quais
estabelecem padrões para a melhoria da qualidade da energia elétrica, principalmente em
relação ao fator de potência, taxa de distorção harmônica (THD) e emissão de ruídos (EMI).
A tendência é que estes padrões passem a ser exigidos pelas concessionárias de energia
elétrica, fazendo com que haja a necessidade de solucionar os problemas causados por cargas
não lineares.
Uma topologia comumente encontrada nos equipamentos eletrônicos é o retificador
com filtro capacitivo, estando presente no estágio de entrada de diversos equipamentos. Esta
estrutura drena da rede elétrica, correntes com elevadas conteúdo harmônico conforme
apresentado na Figura 1.1. A circulação de corrente harmônicas pelas impedâncias do sistema
distorce a tensão no ponto de acoplamento comum, e, portanto, podem afetar outras cargas
conectadas a este, além de comprometer o fator de potência [3].
2
Figura 1.1 – Forma de onda da corrente drenada pelo retificador com filtro capacitivo [4].
Uma solução de caráter corretivo para o problema da circulação de harmônicos no
sistema elétrico é a utilização de filtros passivos, que são estruturas constituídas por
elementos passivos, como indutores e capacitores, que quando associados operam como
filtros de bloqueio ou de confinamento de harmônicos. Embora sejam estruturas de baixo
custo, as mesmas apresentam algumas desvantagens, como por exemplo, elevado peso e
volume, possibilidade de ressonância com o sistema e a operação depende da impedância da
rede. Existe a alternativa da utilização de filtros híbridos (associação entre o filtro ativo e o
filtro passivo), porém não serão abordados, pois será dada uma atenção maior ao filtro ativo
que é o objetivo de estudo neste trabalho.
Qualquer inversor bidirecional em corrente pode ser utilizado como filtro ativo. As
diferentes formas de se conectar estes filtros à rede elétrica (série e paralelo) definem as
características do tipo de correção desejada. Segundo [4] e [5], a conexão em série do filtro
ativo é empregada para compensação da tensão da rede, isolando a carga de flutuações de
tensão e possíveis distorções harmônicas. A conexão em paralelo é utilizada para correções de
distorções na corrente.
3
Segundo [6], tanto os inversores de corrente como os de tensão podem ser utilizados
como filtro ativo. Nos inversores de tensão (VSI – Voltage Source Inverter - Figura 1.2) a
tensão do barramento (
) é mantida constante e superior à máxima tensão da fonte de
alimentação. Por dualidade, para o inversor de corrente (CSI – Current Source Inverter Figura 1.3) tem-se que a corrente de barramento (
) deve ser superior ao pico da corrente a
ser compensada pela rede de alimentação (corrente de carga), o que caracteriza elevadas
perdas no indutor de barramento e nos semicondutores. Além disso, o número de
semicondutores que conduz simultaneamente é o dobro do VSI, tendo em vista que o
interruptor possui um diodo em série, aumentando ainda mais as perdas por condução. Por
estas razões, a estrutura mais adequada e utilizada como filtro ativo é o inversor de tensão
(VSI).
Figura 1.2 - Inversor de tensão (VSI).
Figura 1.3 - Inversor de corrente (CSI).
Conforme comentado anteriormente, o filtro ativo paralelo (FAP) é empregado de
forma a compensar os harmônicos de corrente produzidas por cargas não lineares. Ele é
conectado em paralelo com a carga e com a rede, atuando como um dispositivo que injeta ou
drena corrente no ponto de conexão, de maneira que a corrente total drenada da rede elétrica,
composta pela corrente de filtro mais a corrente de carga, seja puramente senoidal e em fase
com a tensão da mesma (Figura 1.4). Desta forma, o conjunto carga não linear mais filtro
ativo possui um comportamento de carga resistiva para a rede elétrica, resultando em um fator
de potência muito próximo à unidade.
4
Figura 1.4 – Filtro ativo monofásico conectado paralelamente à rede e a carga não linear [4].
Com uma estratégia de controle adequada, o FAP também é capaz de compensar
reativo capacitivo ou indutivo produzido pelas cargas. Esta característica contribui para a
versatilidade do FAP.
O objetivo principal deste trabalho visa a implementar um Filtro Ativo Paralelo (FAP)
de 1 kVA, controlado de forma digital por um microcontrolador ARM, com vistas à redução
da distorção harmônica produzida pela carga não linear na rede elétrica.
5
2. CARGAS NÃO LINEARES, FILTROS ATIVOS E A QUALIDADE
DA ENERGIA ELÉTRICA
Neste capítulo serão apresentados os três principais pilares para o desenvolvimento
deste trabalho:
A qualidade da energia elétrica;
As cargas não lineares, especialmente retificadores não controlados, amplamente
utilizados em equipamentos eletrônicos que drenam correntes com elevado
conteúdo harmônicos;
Os filtros ativos de potência: em especial o filtro ativo paralelo (FAP), que se
apresenta como uma solução eficaz com vista à redução da distorção harmônica
de corrente causada pelas cargas não lineares.
2.1
A Qualidade da Energia Elétrica
A qualidade da energia elétrica tem sido alvo de constante preocupação e motivação
para novos estudos nas últimas décadas. A qualidade da energia elétrica não é mais vista
como uma questão unilateral, onde a única responsável é a concessionária de energia, uma
vez que diversos problemas têm origem no consumidor. Neste cenário, consumidores e
concessionárias de energia dividem responsabilidades que são pontuadas por normas
específicas.
Um problema de qualidade de energia são, por exemplo, desvios de tensão, corrente
ou frequência, que podem resultar em falhas ou mau funcionamento do equipamento. Assim,
para definir o que seja qualidade de energia elétrica, tem-se que tratar de vários problemas
que afetam os consumidores da energia elétrica ou os seus usuários indiretos. Esses problemas
vão desde os incômodos visuais provocados pela variação luminosa devido à má regulação da
tensão até a interferência em equipamentos eletrônicos sensíveis, causada por interrupções no
fornecimento de energia ou por fenômenos de mais alta frequência, sobreaquecimento de
máquinas elétricas devido às harmônicas, etc.
6
Podemos citar alguns fatores que motivam a preocupação com a qualidade da energia
da rede elétrica:
O aumento expressivo de cargas não lineares, tanto nas residências como nas
indústrias, que afetam a qualidade da energia da rede elétrica em função do alto
conteúdo harmônico das correntes drenadas por estas;
A maior compreensão por parte dos usuários dos fenômenos presentes na rede
elétrica, que por sua vez têm condições de exigir das concessionárias uma energia
de melhor qualidade;
A grande quantidade de equipamentos sensíveis conectados à rede, como por
exemplo, os equipamentos hospitalares, que dependem de uma energia de boa
qualidade para operarem corretamente.
2.1.1 Harmônicos
Os harmônicos são tensões com frequências múltiplas inteiras daquela dita
fundamental (frequência de operação do sistema, normalmente 50Hz ou 60Hz). Sendo assim
em um sistema com frequência nominal igual a 60Hz, teremos harmônicos nas frequências de
120Hz (2º harmônico), 180Hz (3º harmônico) e assim por diante.
Conforme comentado, a distorção harmônica é causada pela presença de cargas não
lineares no sistema. Nestes equipamentos a corrente drenada não é proporcional à forma da
tensão aplicada.
A circulação de correntes harmônicas no sistema elétrico implica diversos efeitos
indesejados [7], tais como:
Aumento da temperatura de operação e das perdas em capacitores, motores e
transformadores;
Atuação indevida de equipamentos de proteção;
Interferência e/ou falhas de operação em equipamentos sensíveis;
Excitação de ressonâncias nas impedâncias do sistema;
Distorção de tensão, em função da circulação de correntes harmônicas nas
impedâncias do sistema.
7
2.2
As Cargas não Lineares
As cargas mais prejudiciais ligadas ao sistema elétrico são as cargas do tipo não linear,
ou seja, que não drenam da fonte de alimentação uma corrente puramente senoidal. Pode-se
citar como este tipo de carga os aparelhos eletrônicos que necessitam um circuito especial na
entrada: fontes chaveadas, retificadores, gradadores, dentre outros. Estes tipos de carga
drenam da rede elétrica uma corrente altamente distorcida, com um número elevado de
harmônicas.
Os retificadores estão presentes em diversos equipamentos, e por ser o foco principal
deste trabalho, serão examinados de forma mais detalhada a seguir.
Como a tensão da rede é geralmente alternada, faz-se necessária a utilização de um
estágio inicial de processamento de energia, que converta a tensão alternada em tensão
contínua. A estrutura de potência comumente utilizada é o retificador monofásico a diodos
com filtro capacitivo. A Figura 2.1 ilustra esta estrutura.
Figura 2.1 – Retificador monofásico com filtro capacitivo.
Para que a tensão sobre a carga possa ser considerada uma fonte de tensão constante, é
necessário utilizar um capacitor com elevada capacitância. Como a transferência de energia da
fonte para o banco ocorre em pequenos espaços de tempo, as correntes de entrada do
conversor têm uma característica impulsiva, apresentando elevados picos, elevada distorção
harmônica e grande fator de crista (razão entre os valores de pico e eficaz).
O formato da corrente drenada por este tipo de carga é apresentado na Figura 2.2,
juntamente com a tensão de entrada (tensão da rede).
8
Figura 2.2 – Tensão e corrente drenada da rede.
2.3
Filtros Ativos
Os princípios básicos dos filtros ativos de potência foram apresentados em 1971, por
H. Sasaki e T. Machida. O cancelamento das correntes harmônicas da carga não linear era
feito através de injeção de correntes harmônicas de mesma amplitude e fase oposta através do
filtro. Como a estrutura de potência do filtro atuava como um amplificador linear, o
rendimento do mesmo era muito baixo e consequentemente impraticável para sistema de
potência [8].
O conceito de filtro ativo, tal qual é conhecido atualmente, foi introduzido em 1976
por Gyugyi e Strycula, os quais apresentaram uma família de filtros constituídos de
conversores PWM com transistores de potência [9].
Os filtros ativos foram inicialmente propostos para a redução de conteúdo harmônico
gerado por conversores utilizados nos sistemas de transmissão em corrente contínua (HVDC).
Como na década de 70 não existiam transistores de alta potência, o filtro não poderia ser
implementado em um sistema de potência real.
A evolução tecnológica dos dispositivos de potência (MOSFET, IGBT), bem como os
componentes de controle (Microcontroladores, DSPs, FPGAs, ARMs, sensores de efeito Hall)
tem sido um fator motivador para os pesquisadores da área. Ao longo dos anos, diversos
trabalhos foram publicados, com novas estratégias para a determinação dos sinais de
referência, técnicas de controle e estruturas de potência.
9
2.3.1 Classificação dos Filtros Ativos
Os filtros monofásicos têm sido pouco estudados, uma vez que seu emprego está
restrito a sistema de baixa potência ou aplicações específicas [10], mesmo assim, é importante
observar que os filtros ativos monofásicos constituem a melhor solução para a correção do
fator de potência em cargas de baixa potência, nas quais não se justifica a utilização de filtros
passivos ou pré-reguladores.
Gyugyi e Strycula [9] separam os filtros ativos em duas categorias, conforme a sua
conexão com a rede elétrica: tipo série (FAS) ou paralelo (FAP), comumente referenciado na
literatura como filtro shunt).
Figura 2.3 - Filtro ativo série.
Figura 2.4 – Filtro ativo paralelo.
10
Também existe uma terceira e quarta categorias denominadas como filtro híbrido e
filtro universal, que são nada mais do que associações dos filtros ativos e passivos e das
topologias série e paralelo respectivamente [4]. O objetivo de estudo deste trabalho está
focado nos filtros Ativos Paralelos.
2.3.2 Filtro Ativo Paralelo
O filtro ativo do tipo paralelo (FAP) é geralmente empregado para corrigir harmônicas
de corrente de cargas não lineares. Ele é conectado em paralelo com a rede e com a carga,
onde ele atua como um dispositivo que injeta ou drena uma corrente do ponto onde foi
conectado de forma que a corrente total drenada da rede elétrica (corrente da carga mais a
corrente do filtro ativo seja senoidal). Pela rede elétrica circula então apenas a componente
fundamental da corrente de carga, resultando para a rede elétrica um comportamento de carga
resistiva (carga não linear mais filtro ativo), como se pode observar na Figura 2.5.
Figura 2.5 – Princípio de funcionamento de um FAP.
Para facilitar o entendimento do princípio de funcionamento do FAP são apresentadas
na Figura 2.6 as correntes drenada da rede, drenada/injetada pelo FAP e drenada pela carga
para o FAP funcionando em paralelo com uma carga não linear do tipo retificador com filtro
capacitivo.
11
Figura 2.6 - Corrente da rede, da carga e do FAP.
Observando a Figura 2.6 verifica-se que a corrente drenada da rede (rosa) é a soma da
corrente drenada pela carga (amarelo) mais a corrente drenada/injetada pelo FAP (verde).
O FAP não processa potência ativa. Por ele circula apenas uma potência reativa para
compensar as harmônicas de corrente da carga ou o reativo de deslocamento da mesma. Desta
forma, as perdas no FAP são menores do que em relação às do FAS, visto que o último
processa toda a corrente de carga, como será visto adiante.
É importante salientar que não é necessário desconectar a carga para acrescentar o
FAP, pois o mesmo é conectado em paralelo com a rede, assim, caso o FAP deixar de operar,
a carga continua sendo alimentada normalmente pela rede, porém com um baixo fator de
potência, além disso, o FAP tem a capacidade de se adaptar a diferentes tipos de cargas (não
lineares e lineares) sem haver a necessidade de um conhecimento prévio das cargas, bastando
apenas respeitar os limites de potência para a qual o FAP foi projetado.
12
3. ESTRUTURA DO FAP, MODULAÇÃO E ESTRATÉGIAS DE
CONTROLE
Para realizar o projeto dos estágios de potência e controle de um filtro ativo paralelo,
conforme apresentado em [4], [6], [11] e [12], deve-se primeiro definir alguns tópicos
essenciais, como: estrutura do FAP, tipo de modulação que será utilizada e a estratégia de
controle.
A estrutura que possui mais características adequadas para operação como FAP
segundo Souza [5] é o inversor de tensão em ponte completa. Dentre elas podemos citar:
O FAP funciona como um caminho de baixa impedância para as harmônicas de
corrente, emulando uma carga linear;
Podem compensar a defasagem entre a tensão da rede e a corrente da carga;
Comparada com filtros passivos, possui um volume menor;
Não há problemas de ressonância com a rede;
Tem capacidade de se adaptar as modificações da carga;
Não é necessário um conhecimento prévio rede antes da instalação;
Esta estrutura permite o emprego de uma modulação PWM senoidal com três níveis,
que também será comentada neste capítulo. Serão apresentadas duas estratégias de controle
com suas respectivas características para o controle do FAP.
3.1
Estrutura do Filtro Ativo Paralelo
Conforme já comentado anteriormente, os inversores bidirecionais em corrente podem
ser empregados para operação como filtro ativo. Tanto os inversores de corrente como os de
tensão podem ser utilizados.
13
O inversor escolhido para compensar a carga proposta é o inversor de tensão em ponte
completa (VSI-FB – Voltage Source Inverter – Full Bridge apresentado na Figura 3.1. Apesar
deste inversor apresentar quatro interruptores, a máxima tensão sobre os mesmos é limitada
pela tensão de barramento que é proveniente de um capacitor ou um banco de capacitores, o
que facilita a malha de controle de tensão, além disso, existe a possibilidade de se aplicar uma
modulação PWM senoidal com três níveis. Por estas características este inversor é indicado
para potências médias (de 500 VA a 10 kVA).
Figura 3.1 – Inversor de tensão em ponte completa (VSI-FB) [4].
3.2
Modulação a Três Níveis
A modulação é um processo de variação de um sinal modulador, aquele que se deseja
reproduzir, através da influência de um sinal portador. A modulação empregada é, em geral, a
modulação por largura de pulso, conhecida por sua sigla em inglês PWM (pulse-width
modulation).
Será empregada para o controle do FAP a modulação PWM senoidal a três níveis, cuja
forma de geração é ilustrada pela Figura 3.2. Na modulação a três níveis, o valor da tensão na
saída será +Vf ,0 ou – Vf, conforme a onda moduladora senoidal apresente valor instantâneo
maior ou menor que a onda triangular respectivamente.
14
Figura 3.2 – Modulação senoidal três níveis.
3.3
Estratégia de Controle
Será utilizada a técnica de monitoramento da corrente da rede. Nesta técnica, faz-se
necessária a utilização de 3 sensores: um para monitoramento da corrente da rede, um para a
aquisição de uma senoide de referência da rede, e o terceiro para monitoramento da tensão de
barramento CC, conforme apresentado na Figura 3.3.
15
Figura 3.3 – Monitoramento da corrente de rede.
A estratégia de controle exige uma malha de corrente (rápida) e uma de tensão (lenta)
externa. Na Figura 3.4, são apresentados todos os elementos e ganhos das duas malhas de
controle.
Figura 3.4 – Diagrama de blocos da estrutura de controle.
A modelagem do conversor e a metodologia de projeto dos controladores para ambas
as malhas serão detalhados na sequência.
16
3.3.1 Modelagem do Inversor
Conforme apresentado por Souza [5], a equação (3.1) estabelece a função de
transferência do modelo de pequenos sinais da corrente de saída do inversor em função da
razão cíclica.
̂
̂
(3.1)
3.3.2 Malha de Corrente
A malha de corrente faz com que a corrente total drenada da rede elétrica siga uma
referência senoidal que é amostrada da rede pelo sensor de tensão CA. Esta malha deve ser
rápida para que o filtro ativo possa gerar as harmônicas de corrente desejadas. A estrutura de
controle da malha de corrente é apresentada na Figura 3.5.
Figura 3.5 – Estrutura de controle da malha de corrente.
Os blocos no domínio S, apresentados na Figura 3.5 representam:
– compensador de corrente;
- ganho do modulador PWM;
– função de transferência do inversor;
- ganho do sensor de corrente;
- ganho do divisor de tensão do sensor de corrente;
- ganho do filtro anti-aliasing (ver seção 7.12);
- ganho do conversor A/D;
– referência da corrente.
17
O diagrama de blocos do controle da corrente do FAP é apresentado na Figura 3.6.
Figura 3.6 – Diagrama de blocos para o controle da corrente do FAP.
A corrente da rede é monitorada e comparada com uma corrente de referência senoidal
e em fase com a tensão da rede. O resultado desta comparação (sinal de erro
) é tratado por
um compensador de corrente, o qual gera o sinal de controle. Este sinal é então comparado
com duas formas de onda dente de serra defasadas de 180º entre si, as quais darão origem à
modulação à três níveis desejada.
3.3.3 Malha de Tensão
A malha de tensão é responsável por garantir a tensão no barramento CC constante,
segundo [6] pelo menos 30% maior que a tensão de pico da rede, e com uma ondulação que
não ultrapasse a especificada para o projeto.
A malha de tensão deve ser bastante lenta, pois ela atua na amplitude da corrente
senoidal que é drenada da rede e, sendo assim, se esta malha for rápida ela fará com que a
18
corrente senoidal drenada da rede se distorça devido ao surgimento de picos de corrente de
diferentes amplitudes e de distorções na corrente de referência.
A função de transferência
, apresentada em [6], é expressa pela equação
(3.2).
(3.2)
A estrutura de controle da malha de tensão é apresentada na Figura 3.7.
Figura 3.7 - Estrutura de controle da malha de tensão.
Os blocos no domínio ‘s’, apresentados na Figura 3.5 representam:
– função de transferência da malha de corrente do inversor;
– função de transferência da planta de tensão;
- ganho do sensor de tensão;
- ganho do filtro anti aliasing;
- ganho do conversor A/D;
– referência da tensão do barramento CC.
O diagrama de blocos do controle da tensão do FAP é apresentado na Figura 3.8.
19
Figura 3.8 - Diagrama de blocos para o controle do FAP.
A tensão de barramento é amostrada através de um divisor resistivo ou sensor de efeito
Hall e comparada com uma tensão de referência
compensador de tensão, o qual gera um sinal
referência para o controle da corrente.
. O sinal de erro
é tratado por um
que determinará a amplitude da corrente de
20
4. PROJETO DOS ELEMENTOS PASSIVOS DO FAP
Neste capítulo serão apresentados os cálculos para os componentes do estágio de
potência do FAP (indutor e capacitor), bem como o projeto da carga não linear.
Será também apresentada uma metodologia para o projeto das malhas de controle de
tensão e corrente, especificando as frequências de cruzamento das respectivas malhas e os
ganhos relacionados aos sensores de tensão e corrente.
4.1
Especificação do FAP
Para o projeto do filtro ativo paralelo, as especificações das características de operação
devem ser feitas:
Tabela 4.1 - Especificação do FAP.
Especificação
Valor
Tensão Eficaz da Rede
Frequência de Operação da Rede (
127 V
)
Potência Aparente da Carga (S)
Potência Ativa da Carga (P)
Potência Reativa da Carga (Q)
Tensão no Barramento CC
Ripple de tensão no Barramento CC
Ripple de Corrente no Indutor do FAP
Frequência de Comutação dos Interruptores ( )
60 Hz
1000 VA
550 W
835,16 VAR
350 V
5 %
15 %
30k Hz
As ondulações de tensão e corrente no filtro estão estipuladas dentro da faixa
usualmente empregadas devido ao tamanho físico que os componentes assumiriam.
21
4.2
Projeto
4.2.1 Projeto da Carga
A ponte retificadora usada como carga (apresentada Figura 4.1) é projetada de modo
que a potência aparente total S demandada pela carga seja de 1kVA
Figura 4.1 - Retificador monofásico de onda completa com filtro capacitivo.
As especificações de projeto do retificador monofásico de onda completa com filtro
capacitivo estão apresentadas na Tabela 4.2.
Tabela 4.2 - Especificação do retificador (carga proposta).
Especificação
Tensão Eficaz da Rede
Frequência de Operação da Rede
Potência Aparente (S)
Ripple de Saída
Valor
127 V
60 Hz
1000 VA
10 %
Sabe-se que o fator de potência estimado para um retificador monofásico com filtro
capacitivo projetado para esta faixa de potência é de
(estimativa pessimista).
Assim, através da expressão, pode-se obter a potência ativa demandada pelo retificador.
(4.1)
22
Conhecendo a potência ativa do retificador, utilizou-se a metodologia apresentada em
[13] para realizar o projeto do retificador. Sabendo-se a ondulação da tensão de saída
podemos definir o valor do capacitor de saída
e o resistor de saída
do retificador como
sendo:
(4.2)
(4.3)
Onde
,
e
são obtidos através da tensão de pico da rede e da
ondulação de tensão do capacitor de saída
. Os parâmetros finais obtidos para o retificador
estão apresentados na Tabela 4.3.
Tabela 4.3 – Parâmetros obtidos para o retificador.
Componente
Valor
4.2.2 Indutor do FAP
Para determinar as características da corrente processada pelo FAP precisa-se
primeiramente estabelecer equações para a ondulação de corrente no indutor
. A forma de
onda da tensão sobre os terminais ab da ponte completa está apresentada na Figura 4.2.
23
Figura 4.2 - Tensão nos terminais ab do FAP.
Conforme verificamos na Figura 4.3, a tensão sobre o indutor
é a diferença entre a
tensão nos terminais ab e a tensão da rede.
Figura 4.3 - Terminais a e b do Inversor de tensão em ponte completa [4].
Na operação a três níveis a tensão
e
para
varia entre zero e
para
e zero
. Devido à simetria da forma de onda da tensão
, será analisada
apenas o primeiro intervalo.
A análise pode ser realizada quando os interruptores
e
estão conduzindo, de
acordo com a Figura 4.3. Assim, tem-se a equação (4.4):
(4.4)
24
Considerando que a tensão sobre o indutor, dentro do intervalo de análise, não varie, a
partir de (4.4) tem-se (4.5).
(4.5)
O intervalo de tempo
da equação (4.5), para uma modulação dente de serra, é
calculado de acordo com (4.6)
(4.6)
Como pelo FAP não deve circular potência ativa (apenas o suficiente para suprir as
perdas), pode-se considerar que a tensão
possui uma componente fundamental de mesma
amplitude, frequência e fase que a tensão da rede. Assim sendo, obtemos (4.7).
(4.7)
Em [6] é apresentado que:
(4.8)
Substituindo (4.7) em (4.8) obtém-se a razão cíclica instantânea para meio período de
operação (
), a qual é expressa por (4.9).
(4.9)
Substituindo (4.9) em (4.6), e o resultado em (4.5), obtém-se a equação de ondulação
no indutor do FAP para o semiciclo positivo da rede, conforme (4.10).
25
{
[
] }
(4.10)
A relação entre o pico da tensão da rede e o valor da tensão de barramento
conhecida como índice de modulação (
é
), de acordo com a equação (4.11). Para suprir a
demanda de corrente proveniente da carga, o valor da tensão de barramento deve ser (pelo
menos) 30% da tensão de pico da rede.
(4.11)
A ondulação de corrente parametrizada é apresentada em (4.12).
(4.12)
̅̅̅̅
Através da equação (4.13) e (4.12) em (4.10), tem-se a ondulação de corrente
parametrizada, em função de
e
, para o semiciclo positivo de operação (
̅̅̅̅
[
]
).
(4.13)
Através da equação (4.13) traça-se o gráfico da Figura 4.4, que apresenta a ondulação
de corrente parametrizada no indutor do FAP para diferentes valores do índice de modulação
(
), durante o intervalo
.
26
Figura 4.4 - Ondulação de corrente parametrizada [4].
De acordo com o gráfico da Figura 4.4, percebe-se que para a modulação a três níveis,
a ondulação máxima de corrente parametrizada é igual a 0,25 e é independente do índice de
modulação
e
.
Desta forma, a indutância do filtro ativo paralelo pode ser obtida através da expressão
(4.12), considerando a ondulação de corrente parametrizada definida pela Figura 4.4 e os
valores apresentados na Tabela 4.1. Assim, reescrevendo (4.12) obtém-se a expressão (4.14),
que será utilizada para o cálculo da indutância do FAP.
̅̅̅̅̅̅̅̅̅̅̅
(4.14)
Para a utilização da expressão (4.12), é necessário calcular o valor da ondulação
máxima de corrente permitida no indutor. A ondulação de corrente apresentada na Tabela 4.1
é uma porcentagem da corrente de pico da rede (corrente de entrada). Como esta corrente será
considerada senoidal e em fase com a tensão da rede, o valor da corrente eficaz drenada da
rede é obtida por (4.15).
(4.15)
A corrente de pico foi estimada através de simulação com o software PSIM [14]. O
valor da mesma é apresentado pela equação (4.16):
27
(4.16)
Com o valor da corrente de pico da rede, calcula-se a ondulação (10%) de corrente
máxima no indutor do filtro através de (4.17):
(4.17)
De acordo com a Figura 4.4, para o índice de modulação encontrado por (4.11),
, a máxima ondulação de corrente parametrizada é 0,25. Assim, através da equação
(4.13) e da Tabela 4.1 calcula-se a indutância necessária para o filtro ativo através de (4.18):
̅̅̅̅̅̅̅̅̅̅̅
(4.18)
4.2.3 Banco de Capacitores do FAP
Um valor inicial para o capacitor de barramento do FAP pode ser encontrado através
da relação (4.19), que calcula a capacitância de um retificador monofásico de onda completa
com filtro capacitivo, fornecida por [13].
(
A potência reativa do FAP (
)
) é, na verdade, a potência que será processada pelo
mesmo, ou seja, toda a potência reativa demandada pela carga (
√
(4.19)
√
) apresentada em (4.20):
(4.20)
28
Já os valores
e
são obtidos através da ondulação de tensão do
barramento apresentado na Tabela 4.1.
(4.21)
(
)
Vale lembrar que existem dois critérios para a escolha de capacitores: o critério de
ondulação da tensão apresentado pela equação (4.19) e o critério de capacidade de condução
de corrente.
A dificuldade de se encontrar capacitores com capacidade de corrente elevada faz com
que seja necessária a associação de capacitores em paralelo, reduzindo desta forma a
resistência série do barramento.
Os parâmetros obtidos para o filtro ativo estão apresentados na Tabela 4.4.
Tabela 4.4 – Especificação dos componentes para o FAP.
Especificação/Parâmetro
Valor
Índice de modulação
0,51
Máxima ondulação de corrente parametrizada no indutor
0,25
Capacitor
Indutor
(estimativa inicial)
29
5. PROJETO DOS ELEMENTOS DE CONTROLE DIGITAL
Para o projeto das malhas de controle de tensão e corrente deve-se analisar a função de
transferência de malha aberta (FTMA) do sistema. Todavia, para o correto dimensionamento
dos compensadores envolvidos, alguns conceitos devem ser reforçados, como por exemplo:
frequência de cruzamento, margem de fase e banda passante.
Função de Transferência de Malha Aberta (FTMA): é a composição no domínio
‘z´ de todos os blocos que representam a malha de controle em laço aberto, ou
seja, o modelo da planta, o compensador, o ganho dos sensores, considerados em
cascata sem que se realimente a malha. No domínio ‘z´, os blocos da FTMA são
multiplicados um a um;
Frequência de cruzamento
): é a frequência na qual o ganho da FTMA é 0dB.
Esta frequência determina a largura de banda passante;
Banda passante (BP): é a banda definida pela frequência de cruzamento, que
caracteriza a velocidade de resposta. Quanto maior a banda passante da FTMA,
mais rápida será a resposta do sistema;
Margem de fase (MF): a margem de fase expressa diretamente a robustez do
sistema a perturbações. Quanto maior a margem de fase da FTMA, mais estável
será o sistema em malha fechada. Sua definição é apresentada na equação (5.1):
(5.1)
Onde
representa a fase da FLMA na frequência de cruzamento.
Função de Transferência de Malha Fechada (FTMF): sistema cuja informação da
variável de saída é utilizada como argumento na determinação da variável de
controle.
Lugar das Raízes (LR): o método do lugar das raízes (LR) é um método gráfico
que permite esboçar a trajetória dos pólos de um sistema em malha fechada, em
função do ganho de um sistema.
O projeto consiste então em ajustar os parâmetros do circuito das malhas de corrente e
tensão, de tal forma que se tenha a velocidade de resposta desejada (largura da banda
passante) e que o sistema seja estável em malha fechada (margem de fase adequada).
30
5.1
FTMA de Corrente
A função de transferência de malha aberta (FTMA) digital de corrente é a composição
de todos os blocos que representam a malha de controle em laço aberto (ver Figura 5.1), no
domínio ‘z’, ou seja, a função de transferência que relaciona a corrente com a razão cíclica do
inversor (
corrente (
, o compensador de corrente (
, ganho do modulador PWM (
de transferência do filtro anti-aliasign (
, o ganho do amostrador de
, ganho do conversor AD (
, ganho do divisor resistivo (
, função
,
considerados em cascata sem que se realimente a malha. No domínio ‘z’, os blocos da FTMA
são multiplicados um a um, o que resulta na expressão (5.2):
(5.2)
Sendo:
*
(5.3)
Figura 5.1 – FTMA da malha de corrente.
A primeira etapa em um projeto de controle é determinar um modelo que represente de
modo satisfatório a função de transferência do inversor. Conforme descrito no capítulo
anterior (3.3.1), temos que a função de transferência do inversor é dada por (5.4).
(5.4)
31
Juntamente com a função de transferência do inversor, é acrescida a função de
transferência do filtro anti-aliasign. Segundo Bonfim [15], temos que a função de
transferência de um filtro é dada pela equação (5.5). Maiores detalhes sobre o filtro antialiasign são apresentados na seção 7.12.
(5.5)
Em seguida as duas funções no domínio ‘s’ (inversor e filtro) foram transformadas
para o domínio ‘z’ através da função ‘c2d’, ou ‘continuos to discrete’ do programa MATLAB
[16], que apresenta a sintaxe exibida em (5.6).
(5.6)
Foi utilizado período de amostragem ( ) igual a ⁄ com o método de transformada
de Tustin. As equações (5.7) e (5.8) apresentam respectivamente as funções transferências do
inversor e do filtro anti-aliasign no domínio ‘z’.
(5.7)
(5.8)
5.2
Projeto do Compensador de Corrente Digital
A equação (5.9) é obtida a partir do produto das equações (5.7) e (5.8).
(5.9)
32
Através da ferramenta SisoTool do Matlab é possível gerar o diagrama de Bode da
equação (5.9), apresentado na Figura 5.2.
Figura 5.2 – Diagrama de Bode do inversor e do filtro anti-aliasign.
Quanto maior a frequência, melhor será a resposta dinâmica do sistema. No entanto,
para evitar os efeitos do chaveamento sobre o sinal de controle, utilizou-se ⁄ da frequência
de chaveamento, ou seja,
. Segundo [4], a margem de fase (
usual para os
filtros ativos está em torno de 55°. Desta forma foram ajustados os pólos e zeros a fim de
garantir estas especificações.
A equação (5.3) apresenta o ganho
, como sendo o produto dos ganhos a seguir:
(5.10)
(5.11)
(5.12)
33
(5.13)
Logo teremos que:
(5.14)
*
Alocando os pólos e zeros do compensador com o auxílio do diagrama de Bode,
obteve-se o compensador apresentado na equação (5.15).
(5.15)
Na interface da ferramenta SisoTool são inseridos os valores da função de
transferência do inversor com o filtro, o ganho
compensador
e a função de transferência do
. A Figura 5.3 apresenta o menu onde são inseridos os ganhos da
FTMA.
Figura 5.3 - Inserção dos ganhos da FTMA de corrente.
Na sequência é inserido o ganho K (22) do compensador
visto na Figura 5.4.
, como pode ser
34
Figura 5.4 – Ganho do compensador.
O diagrama de Bode da FTMF obtido pode ser visto na Figura 5.5 e o gráfico do LR
na Figura 5.6. Verifica-se que a FTMF de corrente apresentou na frequência de cruzamento
(
) uma margem de fase de 54,3° para o sistema.
Figura 5.5 – Diagrama de Bode da FTMF de corrente.
35
Figura 5.6 – Gráfico do LR da FTMF de corrente do FAP com controle digital.
O script utilizado no MatLab está apresentado na Apêndice A.
5.3
Projeto do Compensador de Tensão Digital
A função de transferência de malha aberta (FTMA) de tensão é a composição no
domínio ‘z’ de todos os blocos que representam a malha de controle em laço aberto (ver
Figura 5.7), ou seja, os ganhos associados à função de transferência de malha fechada da
corrente (
tensão (
), o compensador de tensão (
), o modelo da planta (
função de transferência do filtro (
), o ganho da malha de
), o ganho do sensor de tensão (
ea
), considerados em cascata sem que se realimente
a malha. No domínio ‘z’, os blocos da FTMA são multiplicados um a um, o que resulta na
expressão (5.16):
(5.16)
Onde:
36
(5.17)
*
Figura 5.7 - FTMA da malha de tensão.
Para o projeto do compensador de tensão, será utilizada a mesma metodologia descrita
no compensador de corrente.
Primeiramente encontra-se a função de transferência
, apresentada em [6], e
expressa pela equação (5.18).
(5.18)
Em seguida a mesma foi discretizada com o comando ‘c2d’ do MatLab.
(5.19)
A função de transferência do filtro anti-aliasign em 60Hz é apresentada em (5.20).
(5.20)
A equação (5.9) é obtida a partir do produto das equações (5.7) e (5.8).
37
(5.21)
Através do SisoTool é possível gerar o diagrama de Bode da equação (5.21),
apresentado na Figura 5.8.
Figura 5.8 - Diagrama de Bode da FTMA de tensão.
Para a malha de tensão, sabendo-se que a mesma deve ser lenta quando comparada
com a malha de corrente, será adotada uma frequência de cruzamento de 2 Hz.
Como a malha de corrente está algumas décadas acima da frequência de corte da
malha de tensão, esta se comporta como um ganho para a malha de tensão. Este ganho está
dividido em duas parcelas: o valor de pico da referência senoidal de corrente e o ganho da
propriamente dito (
. Estes ganhos estão ilustrados na Figura
5.9.
Figura 5.9 – Ganhos associados a
.
A corrente de pico de referência senoidal é calculada de acordo com (5.22) arbitrandose um valor para o ponto de operação do compensador de tensão.
38
(5.22)
Escolhendo um valor de operação de ⁄ da resolução do AD para o ponto de
operação do compensador de tensão (
e dos outros ganhos conforme
apresentados na etapa anterior, através de (5.23) calcula-se o valor de pico da corrente de
referência senoidal.
(5.23)
O
é encontrado analisando a FTMA de corrente para baixas frequências.
Este ganho é dado por:
(5.24)
A finalidade do sensor de tensão é fornecer uma amostra da tensão do barramento.
Será utilizado um divisor resistivo, o qual apresentará um ganho conforme apresentado na
equação (5.25):
(5.25)
Desta forma obtemos o ganho
através da equação (5.26):
*
(5.26)
Alocando os pólos e zeros do compensador com o auxílio do diagrama de Bode,
obteve-se o compensador implementado pela equação (5.27).
39
(5.27)
No SisoTool é carregado os valores dos ganhos
, da FTMA de tensão,
e a função de transferência do compensador de tensão
. A Figura 5.10
apresenta o menu onde são inseridos os ganhos da FTMA.
Figura 5.10 – Inserção dos ganhos da FTMA de tensão.
Na sequência é inserido o ganho K (
) do compensador
, como pode
ser visto na Figura 5.11.
Figura 5.11 – Ganho do compensador.
O diagrama de Bode da FTMF obtido pode ser visto na Figura 5.12 e o gráfico do LR
na Figura 5.13. Verifica-se que a FTMF de corrente apresentou na frequência de cruzamento
(
) uma margem de fase de 70,4° para o sistema.
40
Figura 5.12 - Diagrama de Bode da FTMF de tensão.
Figura 5.13 - Gráfico do LR da FTMF de tensão do FAP com controle digital.
O script utilizado no MatLab está apresentado na Apêndice B.
41
7. COMPONENTES E CIRCUITOS AUXILIARES
Neste capítulo serão apresentados os componentes principais utilizados para a
implementação do protótipo do filtro ativo, bem como o projeto dos circuitos auxiliares
relevantes à construção do protótipo de 1kVA.
A Figura 7.1 apresenta um diagrama de blocos da estrutura do protótipo do FAP.
Figura 7.1 – Diagrama de blocos do protótipo do FAP.
42
7.1
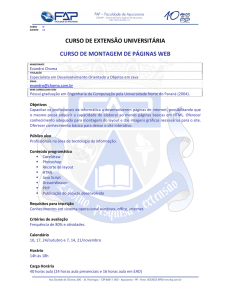
FRDM-KL25Z ARM Cortex M0+
A estrutura de controle e comando do protótipo foi desenvolvida com o kit FRDM-
KL25Z ARM Cortex M0+ da Freescale [17]. A FRDM-KL25Z (Figura 7.2) é uma
plataforma de desenvolvimento composta pelo microcontrolador Kinetis ARM ® Cortex ™M0+ série L.
Foi escolhido entre os diversos softwares de desenvolvimento para a FRDM-KL25Z
o CodeWarrior [18] da Freescale. O CodeWarrior contempla o Processor Expert, que se trata
de um software de programação em alto nível, o que facilita a programação e configuração do
kit.
Figura 7.2 - FRDM-KL25Z ARM Cortex M0+ [17].
A FRDM-KL25Z oferece:
Microcontrolador ARM MKL25Z128VLK4 MCU - 48 MHz, 128 KB de
memória flash, 16 KB SRAM;
Fácil acesso ao MCU I/O
8 canais de PWM;
14 canais de AD de 16 bits;
Facilidade de programação com o Processor Expert;
Gravação OpenSDA [19];
Depuração USB.
43
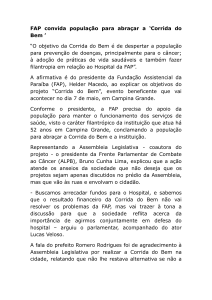
7.2
Sensor de Corrente ACS712
O sensor de corrente ca deve fornecer uma amostra da corrente drenada da rede para
o controlador de corrente conforme apresentado na Figura 7.3.
A máxima corrente drenada da rede com o uso do FAP será de 13 ampères. Assim,
optou-se pelo sensor de corrente ACS712-20 [20], que permite a leitura de até 20 ampères
eficazes. As suas especificações podem ser vistas na Tabela 7.1
Tabela 7.1 - Especificação do sensor de corrente ACS712.
Especificação
Máxima Leitura de Corrente Bidirecional
Tensão de Alimentação
Valor
20 A
5 V
Sensibilidade
100 mV/A
Offset
2,5 V
Isolação
2,1k Vrms
FONTE: Datasheet ACS712.
O esquema de ligação deste sensor é apresentado na Figura 7.3.
Figura 7.3 – Esquema de ligação do sensor de corrente ACS712 [20].
44
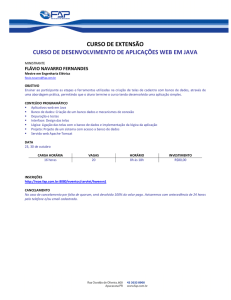
7.3
Senoide de Referência
A função do circuito apresentado na Figura 7.4 é fornecer uma amostra da corrente
de entrada, para que esta siga a referência senoidal da rede.
O circuito consiste primeiramente de um transformador abaixador para gerar uma
réplica da senoide da rede, porém com amplitude menor. Como o ARM que será utilizado não
permite níveis de tensões negativos, foram inseridos dois diodos polarizados, a fim de gerar
uma tensão de 1,4V para deslocar o centro da senoide. O divisor resistivo formado por R1 e R2
condiciona o sinal aos níveis de tensão (Figura 7.5) suportados pelos conversores A/D do
ARM.
Figura 7.4 – Circuito gerador da senoide de referência.
Figura 7.5 – Senoide de referência.
45
7.4
MOSFET IRFP460
O MOSFET escolhido foi o IRFP460 [21], N_Channel da Fairchild Semiconductor.
As características de tensão e corrente deste MOSFET são muito maiores que as exigidas pelo
projeto, o que aumenta a margem de segurança necessária para o seu desenvolvimento. As
características deste componente são apresentadas na Tabela 7.2
Tabela 7.2 - Especificação do MOSFET IRFP460.
Especificação
Valor
Tensão Dreno-Source
500 V
Tensão Gate-Source
±20 V
Corrente Máxima
20 A
0,27 Ω
RDS
FONTE: Datasheet IRFP460.
7.5
Driver IR2104
O driver é o dispositivo responsável por fornecer os pulsos de comando aos
interruptores (MOSFETs) dos braços da ponte completa. Nas estruturas em ponte completa
estes pulsos, tensão entre gate-source, devem ser isolados, devido ao fato de alguns
interruptores não apresentarem o ponto de source em comum.
O driver escolhido é o IR2104 [22], da International Rectifier. As suas
características são apresentadas na Tabela 7.3.
Tabela 7.3 - Especificação do driver IR2104.
Especificação
V offset
Corrente de Entrada
Gate drive supply
Vcc máxima
Tempo on/off
Deadtime
FONTE: Datasheet IR2104.
Valor
600 V
130m/270m A
10-20 V
25 V
680&150n s
520n s
46
Figura 7.6 - Esquema de ligação do driver IR2104 [22].
7.6
Indutor
.
Com o valor da indutância
obtido na seção 4.2.2.1, e com as características da
corrente do FAP pode-se realizar o projeto físico do indutor
. A metodologia utilizada para
o projeto está apresentada em [13] e [23] e o tipo de núcleo o escolhido foi o tipo E-E.
Figura 7.7 – Núcleo e carretel do tipo E [23].
Onde
é a área da perna central e
é a área da janela do carretel.
A Tabela 7.4 apresenta os parâmetros obtidos para a indutância
. Para a corrente
eficaz e de pico obtidas pelas equações (4.15) e (4.16), foi acrescido um percentual de 20%
para que se possa garantir que o indutor não sature nem se superaqueça em qualquer condição
de carga.
47
Tabela 7.4 – Parâmetro obtidos para a indutância
.
Especificação/Parâmetro
Valor
Indutância
2,24m H
Corrente de Pico (
13 A
Corrente Eficaz (
Indução Magnética Máxima (
4,33 A
)
0,3 T
Densidade de Máxima de Corrente do Cobre (
Permeabilidade Magnética do Ar (
)
)
450 A/cm²
1,257 µH/m
Frequência de Comutação dos Interruptores ( )
30k Hz
Fator de Ocupação na Área da Janela (
0,7 --
)
A primeira etapa do dimensionamento do núcleo de ferrite consiste em calcular a
bitola necessária para conduzir a corrente eficaz demandada pelo FAP, que depende por sua
vez, da máxima densidade de corrente admitida pelo condutor. A expressão (7.1) apresenta o
cálculo da área do condutor
(7.1)
Com o valor obtido em (7.1) é possível associar através de uma tabela de fios
esmaltados uma bitola de 19 AWG, que corresponde a uma área de 0,006527 cm² e um
diâmetro de 0,091 cm.
A utilização de condutores em altas frequências deve levar em conta o efeito pelicular
(skin effect). É sabido que, à medida que a frequência aumenta, a corrente no interior de um
condutor tende a se distribuir pela periferia, ou seja, existe uma maior densidade de corrente
nas bordas e menor na região central. Esse efeito causa uma redução na área efetiva do
condutor. Em outras palavras, o efeito pelicular atua de maneira a limitar a área máxima do
condutor a ser empregado [23].
Segundo BARBI [13], o valor da profundidade de penetração pode ser obtido através
da equação (7.2).
48
(7.2)
√
√
Desta forma o condutor utilizado não deve possuir um diâmetro superior a
seja,
, ou
. De acordo com a tabela de fios esmaltados, para o diâmetro
referido deve-se usar um condutor com bitola de 21 AWG, que possui uma área de 0,004105
cm².
Como o diâmetro do condutor encontrado (0,091 cm) é superior ao limite fixado pelo
efeito pelicular, é necessário associar condutores em paralelo a fim de que se possa conduzir a
corrente sem superaquecimento dos fios condutores. O número de condutores pode ser
encontrado a partir da equação (7.3).
(7.3)
Conforme apresentado por BARBI [13], para a escolha do núcleo de ferrite, deve-se
encontrar o valor do produto das áreas conforme apresentamos na equação (7.4), e encontrar
um fabricante que forneça um modelo maior e próximo ao calculado.
(7.4)
Assim pode-se selecionar o modelo do núcleo de ferrite como sendo NEE-65/33/39
da Thorthon [24].
O entreferro possui uma relutância muito maior que a do núcleo, fazendo com o
valor de L seja inacessível às variações na permeabilidade do núcleo, desta forma, o indutor
pode operar com valores maiores de corrente sem que ocorra saturação do núcleo.
Constatou-se que com um entreferro de aproximadamente 0,8cm, densidade de fluxo
definida como parâmetro de projeto do indutor não deve ultrapassar 0,3T. Desta forma, a
partir da equação (7.5) é possível encontrar o número de espiras necessárias para ser montado
o indutor.
49
√
7.7
√
(7.5)
Banco de Capacitores FAP (
De acordo com a equação (4.21), será necessário um banco de capacitores de
1µF. Desta forma, optou-se por utilizar 4 capacitores 150µF/420V da Rubycon [25],
colocados em paralelo (Figura 7.8), alcançando assim um banco de 600µF/420V.
Figura 7.8 – Banco de capacitores 600µF/420V.
7.8
Banco de Capacitores da Carga
De acordo com a equação (4.2), será necessário um banco de capacitores de
Desta forma, optou-se por utilizar 6 capacitores 1000µF/100V da Rubycon [25],
colocados em série dois a dois (Figura 7.9), alcançando assim um banco de 1500µF/200V.
Figura 7.9 - Banco de capacitores 1500µF/200V.
50
7.9
Circuito de Partida Suave (InRush)
Um circuito de partida faz-se necessário para limitar a corrente de pré-carga do
capacitor de barramento do FAP, tendo em vista que este se comporta como um curto-circuito
quando descarregado. Para reduzir este efeito, utiliza-se um resistor de limitação de corrente
de pré-carga (
), que limita o pico da corrente de carga do capacitor. Este resistor deve
ser curto-circuitado quando a tensão dos capacitores atingir aproximadamente 180V (valor de
pico da senoide da rede).
O valor de
é definido de acordo com (7.6).
(7.6)
A corrente de pico (
deve ser estipulada para que não haja danos nos
FETs bem como no indutor de filtragem
. Assim sendo, o resistor
será calculado
para uma corrente máxima de aproximadamente 8A, o que não compromete os componentes
citados.
Logo, utilizando (7.6) teremos que:
(7.7)
Este resistor deve possuir uma capacidade de suportar corrente elevada (resistor de
potência), tendo em vista os níveis de corrente que circularam por ele. Serão utilizados
resistores em paralelo de
, resultando em uma impedância total de
Devido aos níveis de corrente que circularam pelo FAP, para curto-circuitar o
resistor de inrush será utilizado um relé. Foi escolhido o relé SRD-S-12D [26] da Sanyou. As
características deste relé estão apresentadas na Tabela 7.5:
51
Tabela 7.5 - Especificação do relé SRD-S-12D
Especificação
Max Corrente de Chaveamento
Max Tensão de Chaveamento
Tensão Nominal Bobina
Resistência Bobina
Valor
15 A
250 VAC
24 VDC
1600 Ω
FONTE: Datasheet relé SRD-S-12D.
Para realizar o acionamento do relé, foi utilizado um transistor NPN BC548-B [27] e
um transistor PNP BC558 [28], ambos da Fairchild, no modo de saturação. A Figura 7.10
apresenta o diagrama elétrico desenvolvido para o acionamento do relé.
Figura 7.10 – Circuito para acionamento do relé.
7.10
Fonte Auxiliar
Para a alimentação do ARM, drivers e sensor de corrente, foi necessário desenvolver
uma placa com fontes auxiliares, denominada “DC_Power_Supply” (Apêndice E), cuja
função é fornecer tensões de 3,3V, 5V e 24V.
As fontes estão divididas em quatro estágios: transformador abaixador, estágio de
retificação, estágio de filtragem e regulação de tensão. O diagrama completo das fontes
auxiliares é apresentado na Figura 7.11.
52
Figura 7.11 – Esquemático fontes auxiliares.
A ponte retificadora utilizada foi a D10XB60 [29] da Shindgen. Esta ponte
retificadora é capaz de suportar 600V e 10A.
Os capacitores de filtragem da tensão retificada
e
são calculados através da
equação (7.8):
(7.8)
Onde:
o
é a corrente de carga máxima,
é a frequência da rede (60Hz) e
é a ondulação máxima permitida no capacitor. Assim, utilizando a equação (7.8) e
considerando as correntes de carga, podemos calcular os capacitores de filtragem
apresentados em (7.9) e (7.10):
(7.9)
(7.10)
Serão utilizados os valores comerciais para os capacitores calculados em (7.9) e
(7.10), assim
e
.
53
Os capacitores de filtro
,
,
,
e
, são responsáveis por filtrar as altas
frequências, portanto podem ser capacitores cerâmicos de 100nF/63V. Para a filtragem de
ruídos na tensão de saída dos reguladores são inseridos os capacitores eletrolíticos
,
e
de 10µF/50V.
Para a etapa de regulação das tensões de saída das fontes auxiliares serão utilizados
os reguladores LM7805 [30], LM7824 [30] e LDV33 [31].
7.11
Buffer
O buffer garante que os sinais vindos dos sensores de corrente, tensão e senoide de
referência, não sejam afetados pela impedância de entrada do circuito, reforçando as correntes
e casando as impedâncias.
O buffer foi construído com um amplificador operacional da Texas Instruments,
LM324 [32], na configuração seguidor unitário, sem inversão de polaridade ou fase. A Figura
7.12 apresenta o diagrama elétrico do buffer.
Figura 7.12 –Buffer com AmpOp.
Tabela 7.6 - Especificação do Amp Op LM324.
Especificação
Alimentação
Corrente de saída
Valor
3-32V V
50 mA
Largura de Banda
1 MHz
Numero de Amp Op
4
FONTE: Datasheet LM324.
54
7.12
Filtro Anti-Aliasign
O filtro anti-aliasing é um filtro do tipo “passa-baixas” com Amp Op, onde a
frequência de corte ( ) do filtro, segundo o teorema de Nyquist, deve ser a metade da
frequência de amostragem.
O filtro foi desenvolvido com o LM324 [32] utilizado anteriormente para
desenvolvimento do buffer. O circuito elétrico é apresentado na Figura 7.13.
Figura 7.13 – Filtro anti-aliasign.
Para dimensionamento do filtro anti-aliasign para os circuitos da senoide da
referência e do senhor de corrente, atendendo aos critérios de Nyquist, estipulou-se uma
frequência de corte
. Arbitrando-se o valor da capacitância
, encontra-se
o valor de R através da equação (7.11):
(7.11)
Processo análogo foi feito para o projeto do filtro anti-aliasign para o circuito do
sensor do barramento CC, porém, para uma frequência de corte
capacitância
. Utilizando uma
, encontra-se o valor de R através da equação (7.12):
(7.12)
55
8.
RESULTADOS OBTIDOS
8.1
Montagem do Protótipo
Nesta seção é apresentado como todos os elementos anteriormente descridos foram
montados tanto fisicamente como logicamente.
Para garantir uma proteção contra fugas de correntes, na entrada do protótipo foi
previsto um interruptor diferencial residual (DR) da JNG [33]. O DR permite desligar o
circuito caso seja detectada uma corrente de fuga superior 30 mA. A corrente de fuga é
avaliada pela soma algébrica dos valores instantâneos das correntes de entrada e saída do
protótipo.
Figura 8.1 – Interruptor diferencial residual.
Na entrada foi projetada e confeccionada uma placa de circuito impresso (PCB) para
ligar fisicamente todos os pontos de tensão AC do protótipo: fontes de alimentação, sensor de
corrente, sensor da senoide de referência, carga não linear e inversor. Nesta PCB também está
montado o circuito de inrush, responsável por minimizar o pico de corrente oriundo da carga
inicial dos capacitores. O diagrama elétrico está apresentado no apêndice E. A PCB está
apresentada na Figura 8.2.
56
Figura 8.2 – PCB da entrada AC com circuito de inrush.
O circuito de alimentação, transformadores abaixadores e PCB “Power Supply” foram
posicionados de forma a facilitar a conexão com a PCB do controle/inversor (Figura 8.3).
Figura 8.3 – Fonte Auxiliar (Power Supply).
57
A FRDM-KL25Z foi conectada à PCB controle/inversor. Os circuitos de aquisição da
senoide de referência e do sensor de corrente, juntamente com o buffer e o filtro anti-aliasing,
por serem circuitos sensíveis às interferências, foram posicionados o mais próximo possível
da FRDM-KL25Z de forma a minimizar o efeito de ruídos provenientes do ambiente externo.
Figura 8.4 – PCB controle.
No que diz respeito ao inversor, os drivers IR2104, foram posicionados de forma a
mantê-los equidistantes da FRDM-KL25Z e mais próximos possíveis dos FETs, para evitar
desta forma disparos acidentais dos mesmos provenientes de ruído externo.
58
Figura 8.5 – PCB inversor.
As trilhas de potência foram dimensionas de forma a propiciar circulação de correntes
de até 15A. O dimensionamento foi realizado através de uma aplicação presente no KiCAD
(Figura 8.6). Desta forma, no layout nenhuma trilha de potência ficou com largura menor que
10mm, para uma PCB com 35µm de espessura.
59
Figura 8.6 – Dimensionamento das trilhas de potência.
Os demais componentes, indutor do filtro e carga não linear, foram conectados à PCB
da entrada 127VAC (Figura 8.2), sempre observando a referência para suas conexões. A
referência esta apresentada na Figura 8.8. A Figura 8.7 apresenta o protótipo final montado.
Figura 8.7 – Montagem final do protótipo do FAP.
60
8.2
Simulação do FTMF da Corrente e Tensão
Para verificação do funcionamento da malha de corrente e tensão, foi simulado com o
auxílio do PSIM [14] o FAP juntamente com a carga conectados em paralelo com a rede,
controladas de forma digital (Figura 8.8). Nela estão inseridos os ganhos dos sensores, filtros,
conversores AD e PWMs detalhados no capítulo 5.
Figura 8.8 – Simulação da malha de corrente e tensão do FAP controlado digitalmente.
O PSIM permite “emular” o microcontrolador e o PWM foi utilizando a estrutura
apresentada na Figura 8.9. O código desenvolvido para esse teste está apresentado no
Apêndice C.
61
Figura 8.9 – Emulador do microcontrolador e PWM do PSIM.
Na Figura 8.10 é apresentada a corrente da rede juntamente com a corrente drenada
pela carga, e a corrente gerada pelo FAP a fim de eliminar a distorção harmônica provocada
pela carga não linear. Verifica-se que o controle ocorre de forma satisfatória, visto que o FAP
consegue gerar uma corrente de módulo igual ao consumido pela carga, porém defasado 180º.
Figura 8.10 – Tensão da rede com a corrente de carga e a corrente gerada pelo FAP.
Conforme pode ser observado na Figura 8.11, a malha de controle de tensão mantém a
tensão do banco constante em 350V, com um ripple de 18VDC.
62
Figura 8.11 – Tensão no banco de capacitores do FAP.
8.3
Implementação do Protótipo
O firmware para a FRDM-KL25Z foi desenvolvido como pro Processor Expert [34].
O Processor Expert trabalha com estruturas denominadas ‘beans’, que são macros que
permitem uma configuração em alto nível (Figura 8.12), configurando de forma abstrata para
o usuário os registradores do microcontrolador.
Figura 8.12 – Beans Processor Expert.
Os códigos fonte do ProcessorExpert.c e Events.c estão nos apêndices J e K
respectivamente.
63
Em virtude do curto tempo não foi possível obter os resultados nas condições
nominais de operação. Dessa forma, os resultados apresentados foram obtidos em testes
preliminares com tensão e potência reduzida. Os ensaios foram realizados com apenas 10%
das condições nominais de corrente e de tensão:
Alimentação da rede: 12,7 VAC;
Tensão de barramento: 35 VDC.
Para realizar esta etapa, as malhas de controle também foram re-projetadas, sendo que
a malha de corrente, foi testada independente, para depois ser testada juntamente com a malha
de tensão.
8.3.1 Nova Malha de Corrente
O novo controlador da malha de corrente foi projetado, conforme apresentado na
seção 5.2, onde o mesmo é apresentado pela equação (8.1) abaixo:
(8.1)
A fim de testá-lo, foi realizado o setup apresentado na Figura 8.13. Na entrada, ao
invés de conectar o protótipo na rede, foi inserido uma carga de
“alimentado” com uma fonte externa de 35VDC.
e o barramento foi
64
Figura 8.13 – Setup para teste da malha de corrente.
Verificou-se que nesta configuração, o FAP operou como inversor, injetando energia
na rede (Figura 8.14), suprindo a corrente exigida pela carga não linear (Figura 8.15) e pela
carga linear (Figura 8.16) como esperado.
Figura 8.14 – Corrente fornecida pelo FAP.
65
Figura 8.15 – Corrente na carga não linear.
Figura 8.16 – Corrente na carga linear.
66
8.3.2 Nova Malha de Tensão
Com o controlador da malha de corrente implementado e testado, o passo seguinte foi
projetar o controlador da malha de tensão, conforme apresentado na seção 5.4. A equação
(8.2) apresenta o controlador da malha de tensão:
(8.2)
Para testá-lo, foi realizado o setup apresentado na Figura 8.17. A semelhança entre os
resultados obtidos por simulação e os obtidos com o protótipo comprovam o correto
funcionamento do mesmo.
Figura 8.17 – Setup de teste do FAP.
Verifica-se através da Figura 8.18, que a tensão do barramento se manteve fixa, porém
com um pequeno offset, provavelmente proveniente de alguma imprecisão do ajuste do
divisor resistivo.
67
Figura 8.18 – Tensão no barramento do protótipo.
A Figura 8.19 apresenta a corrente de carga que se deseja corrigir.
Figura 8.19 – Corrente da carga não linear.
A Figura 8.20 apresenta a corrente gerada pelo FAP, a fim de corrigir a distorção
produzida pela carga não linear.
68
Figura 8.20 – Corrente do FAP.
A Figura 8.21 apresenta a corrente senoidal da rede, fazendo com que o conjunto carga
mais FAP represente uma carga resistiva pura, caracterizando desta forma uma baixa
distorção harmônica.
Figura 8.21 – Corrente da rede.
69
9.
CONCLUSÕES E PERSPECTIVAS
O inversor foi projetado com dois braços de MOSFETs, controlados por dois drivers
que eram acionados através da modulação PWM gerado pelo microcontrolador. Como
unidade de processamento e controle foi utilizado um microcontrolador ARM de alto
desempenho em conjunto com os sensores de corrente e tensão CA e CC. Todos os circuitos
auxiliares e componentes passivos foram criteriosamente projetados e implementados a fim de
garantir o perfeito funcionamento do projeto.
Toda a malha de controle, tensão e corrente, foram projetadas digitalmente através da
técnica de alocação de pólos e zeros com o auxílio da ferramenta sisotool do MatLab.
Ressaltando que a malha de corrente deveria ser uma malha rápida, para responder aos picos
de correntes da carga, enquanto que a malha de tensão deveria ser uma malha mais lenta.
Antes de realizar a implementação prática do FAP, foram realizadas diversas análises
das malhas de controle em conjunto com o circuito de potência através do simulador PSIM.
Durante os testes, foi desenvolvido um firmware para que pudesse ser observado o
comportamento do FAP. Também foram acrescidos vários módulos, a fim de realizar as
simulações com maior fidelidade ao processo real.
Em virtude do curto tempo não foi possível obter os resultados nas condições
nominais de operação. Dessa forma, os resultados foram obtidos em testes preliminares com
tensão e potência reduzida, 10% das condições nominais de corrente e de tensão, sendo
necessário realizar um novo projeto das malhas de controle para as novas especificações. Com
os resultados práticos alguns pontos foram levantados para serem levados em consideração
em trabalhos futuros:
A frequência de operação do microcontrolador, que embora possua uma frequência de
operação alta, durante a rotina de execução do código, a taxa de amostragem ficou
próxima de 5kHz;
A falta de um recurso de hardware no microcontrolador para trabalhar com pontos
flutuantes comprometeu a frequência de operação, visto que esta rotina foi
implementada via software exigindo muito mais processamento de cálculos do
mesmo.
70
Observou-se na prática que a frequência de cruzamento das malhas de controle ficou
muito abaixo do previsto e utilizado nas simulações, devido à baixa frequência de
amostragem, sendo necessário adequá-las para 1kHz para a malha de corrente e 2Hz
para a malha de tensão;
Mesmo com todas as alterações, a semelhança obtida entre os resultados experimentais
e os resultados de simulação evidencia o funcionamento de forma correta do FAP,
aproximando a prática com a teoria estudada. Analisando os resultados finais, comprava-se o
funcionamento e eficácia do FAP para correção de harmônicos de corrente gerados por cargas
não lineares.
Pretende-se dar continuidade em trabalhos futuros o estudo do FAP, estudando de
forma mais criteriosa os pontos críticos levantados com o protótipo buscando: minimizar os
ruídos dos sensores de corrente seja pela troca dos mesmos; redimensionar as malhas de
controle para a frequência de operação suportada pelo microcontrolador; ou substituir o
microcontrolador por um que tenha suporte para trabalhar com pontos flutuantes e frequência
mais alta de operação.
71
REFERÊNCIAS
[1] I. S. 519-1992, “IEEE Recomended Pratices and Requiriments for Harmonic Control in
Electrical Power Systems,” 1992.
[2] I. S. 6100-3-2, “IEEE Intenational Standad - Eletromagnetic Compatibility - Limits of
Harmonic Current Emission”.
[3] M. S. ORTEMANN, “Filtro Ativo Trifásico com Controle Vetorial Utilizando DSP:
Projeto e Implementação,” Dissertação de Mestrado UFSC, Florianópolis, SC, 2008.
[4] D. LINDEKE, “Projeto de um Filtro Ativo Paralelo Usando Técnica de Controle
Analógico e Digital,” Dissertação de Mestrado UFSC, Florianópolis, SC, 2003.
[5] F. P. SOUZA, “Correção do Fator de Potência para Instalações de Baixa Potência
Empregando Filtros Ativos,” Tese de Doutorado UFSC, Florianópolis, SC, 2000.
[6] M. P. FENILI, “Estudo e Implementação de um Filtro Ativo Paralelo Monofásico de
8kVA,” Dissertação de Mestrado UFSC, Florianópolis, SC, 2007.
[7] E. KASSICK, “Harmonicas em Sistemas Industriais de Baixa Tensão.,” Apostila INEP
UFSC, Florianópolis, SC, 2008.
[8] F. PENG, A. H. e A. NABAE, “A new Approach to Harmonic Compensation in Power
Systems,” IAS Annual Meeting, n. Conference Record off the 1988 IEEE, pp. 874-880,
1988.
[9] L. GYUGYI e E. DTRYCULA, “Active AC Power Filters,” IEEE ind. Appl. Ann.
Meeting, n. vol.19, pp. 529-535, 1976.
72
[10] H. AKAGI, “Active Harmonic Filters,” IEEE Proc, vol. 93 nº12, pp. 2128-2141, 2005.
[11] F. POTTKER, “Correção do Fator de Potência para Instalações de Baixa Potência
Empregando Filtros Ativos,” Tese de doutorado INEP-PGEEL-UFSC, Florianópolis, SC,
2000.
[12] B. SANTOS, P. MELO e W. DANELUZ, “Projeto e Implementação de um Filtro Ativo
Série Monofásico para Correção de Distorção Harmônica de Tensão Controlado por
Processado Digital de Sinais,” Projeto final de curso UTFPR, Curitiba, PR, 2007.
[13] I. BARBI, Projetos de Fontes Chaveadas, Florianópolis, SC, 2001.
[14] PSIM. [Online]. Available: http://powersimtech.com/products/psim/. [Acesso em 2013].
[15] M. J. d. C. Bonfim, “Filtros Ativos (Notas de Aula),” UFPR, Curitiba-PR, 2009.
[16] MatLab,
MathWorks,
2010.
[Online].
Available:
http://www.mathworks.com/products/matlab/. [Acesso em 22 junho 2013].
[17] Frescale, “User's Manual,” FRDM-KL25Z. [Online].
[18] Freescale, “CodeWarrior Common Features Guide,” [Online].
[19] Freescale, “User's Guide,” OpenSDA, 18 09 2012. [Online].
[20] Datasheet, Allegro MicroSystems, ACS712 - Hall Effect-Based Linear Current Sensor .
[21] Datasheet, Fairchild Semiconductor, Mosfet IRFP460.
73
[22] Datasheet, International Rectifier, IR2104 - Half-Bridge Driver.
[23] I. BARBI, C. FONT e R. ALVES, “Projeto Físico de Indutores e Transformadores,”
INEP, Florianópolis, SC, 2002.
[24] Datasheet, Thornton Eletrônica Ltda., NEE-65/33/39.
[25] Datasheet, Rubycon, Capacitors Catalog 2014.
[26] Datasheet, Sanyous Relays, SRD-S-12D .
[27] Datasheet, Fairchild Semiconductor, BC548 - NPN Transistor.
[28] Datasheet, Fairchild Semiconductor, BC558 - PNP Transistor.
[29] Datasheet, Shindengen, D10XB60 - General Purpose Rectifiers.
[30] Datasheet, Fairchild Semiconductor, LM78XX Series Positive Voltage Regulator.
[31] Datasheet, ON Semiconductor, LD1117 Series - Low Drop Fixed and Adjustable
Positive Voltage Regulators.
[32] Datasheet, Texas Instruments, LM324 - Low Power Quad Operational Amplifiers.
[33] M. d. Fabricante, JNG Materiais Elétricos, Interruptores Diferenciais DR.
[34] Freescale,
“http://www.freescale.com/webapp/sps/site/home=BEAN_STORE_MAIN,”
11 08 2013. [Online].
74
[35] A. OLIVEIRA, J. OLIVEIRA, A. VILAÇA e A. FILHO, “Uma Contribuição para a
Quantificação e Qualificação das Distorções Hamonicas,” COBEP, 1997.
[36] R. DUGAN, M. McGRANAGHAN e H. BEATY, Eletrical Power Sytems Quality, New
York: McGraw-Hill, 1996.
[37] A. SOUZA, “Retificadores Monofásicos de Alto Fator de Potência com Reduzidas
Perdas de Condução e Comutação Suave,” Tese de Doutorado, PPGEEL-UFSC,
Florianópolis, SC, 1998.
[38] J. L. B. MARQUES e G. P. BRAZ, “EEL7300 - Eletrônica Aplicada - Conteúdos para a
Prática,” Apostila IEB, Florianópolis, SC, 2002.
[39] J. A. VILELA, “Aula 3.3 - Projeto de Sistema de Controle Linear,” Notas de Aula,
Curitiba, PR, 2013.
[40] Sisotool,
MathWorks,
2010.
[Online].
Available:
http://www.mathworks.com/help/control/ref/sisotool.html. [Acesso em 20 junho 2013].
[41] A. L. P. FRANÇA, “SACCI2 - Sistema Auntomático para Confecção de Circuito
Impresso 2,” Trabalho de Conclusão de Curso - UFPR, Curitiba, PR, 2012.
[42] “Kicad,”
[Online].
Available:
http://www.kicad-
pcb.org/display/KICAD/KiCad+EDA+Software+Suite. [Acesso em 2013].
[43] Unicamp,
“http://www.dsce.fee.unicamp.br/~antenor/htmlfile/harmo/fpCAP7/cap7.html,” [Online].
[Acesso em 27 10 2013].
75
[44] E. KASSICK, “Harmonicas em Sistemas Industriais de Baixa Tensão.,” Dissertação de
Mestrad UFSC, Florianópolis, SC, 2004.
[45] M. J. d. C. Bonfim, “http://www.eletrica.ufpr.br/marlio/te054/capitulo5.pdf,” UFPR,
2011. [Online].
76
APÊNDICE A - Script MatLab Malha de Corrente
clc
clear all
close all
format long
f=30000;
Ts=1/f;
%======================================%
% Inversor no dominio 's'
%======================================%
Vcc = 350;
Lf = 2.24*10^-3;
num_Inversor = Vcc;
den_Inversor = [Lf 0];
FT_Inversor = tf(num_Inversor,den_Inversor)
%======================================%
% Inversor no dominio 'z'
%======================================%
FT_Inversor_Digital = C2D(FT_Inversor,Ts,'tustin')
%======================================%
% Filtro Anti-Alisign no dominio 's'
%======================================%
fi=30000;
w = 2*pi*fi/2
num_Alisign = w;
den_Alisign = [1 w];
FT_Filtro = tf(num_Alisign,den_Alisign)
%======================================%
% Filtro Anti-Alisign no dominio 'z'
%======================================%
FT_Filtro_Digital = C2D(FT_Filtro,Ts,'tustin')
%======================================%
% Produto Inversor & Filtro Anti-Alisign
%======================================%
FT_Inve_Filtro = FT_Inversor*FT_Filtro
Inv_Fil_d = C2D(FT_Inve_Filtro,Ts,'tustin')
%======================================%
% Ajustar a função de transferencia
%======================================%
Gc3_d_ajus = ZPK([0.388],[0.0594],22,Ts)
Gc3_d_ajus=tf(Gc3_d_ajus)
sisotool
77
APÊNDICE B - Script MatLab Malha de Tensão
clc
clear all
close all
format long
%======================================%
% Malha de Tensão no dominio 's'
%======================================%
Mi = 0.5132;
Cf2 = 2*569*10^-6;
num_tensao = Mi;
den_tensao = [Cf2 0];
FT_MTensao = tf(num_tensao,den_tensao)
%======================================%
% Malha de Tensão no dominio 'z'
%======================================%
f = 30000;
Ts=1/f;
FT_MTensao_Digital = C2D(FT_MTensao,Ts,'tustin')
%======================================%
% Filtro Anti-Alisign no dominio 's'
%======================================%
fi = 60
w = 2*pi*fi/2
num_Alisign = w;
den_Alisign = [1 w];
FT_Filtro = tf(num_Alisign,den_Alisign)
%======================================%
% Filtro Anti-Alisign no dominio 'z'
%======================================%
FT_Filtro_Digital = C2D(FT_Filtro,Ts,'tustin')
%======================================%
% Filtro Anti-Alisign no dominio 'z'
%======================================%
FT_MTensao_Filtro = FT_MTensao*FT_Filtro
%======================================%
% Malha de Tensã eFunçao de transferencia
% do compensador no dominio 's'
%======================================%
FT_MTensao_Filtro_d = C2D(FT_MTensao_Filtro,Ts,'tustin')
Gv_d_ajus = ZPK([0.99933],[1],5e-8,Ts)
Gv_d_ajus=tf(Gv_d_ajus)
sisotool
78
APÊNDICE C – Firmware Controle Digital PSIM
//--------------------------------------------------------------------------------------------------------------//Declaração das variaveis
//--------------------------------------------------------------------------------------------------------------static double Vrede, Iinv, Iref, Iref2, Vbanco;
static double Vc[4], Erro[4], Vd1, Vd2, Vv[3], Errov[3] ;
static long am, Tperiod, cont;
static int x=0.;
if (x <=0)
{
x=1;
Erro[0]=0.;
Erro[1]=0.;
Erro[2]=0.;
Vc[0]=0.;
Vc[1]=0.;
Vc[2]=0.;
Errov[0]=0.;
Errov[1]=0.;
Vv[0]=0.;
Vv[1]=0.;
}
//------------------------------------------------------------------------------------------------------------// Aquisição dos dados numa frequencia definida
//------------------------------------------------------------------------------------------------------------Tperiod=1./10000.;
// frequencia de amostragem
am=Tperiod/delt;
// amostras a cada numero de passos de calculo
cont=cont+1.;
if (am<cont)
//Rotina do programa
{
cont=0;
//Resetar a contagem
Vrede=21845*in[0]-30583;
Vbanco=21845*in[1];
Iinv=21845*in[2]-30583;
// Malha de tensão
Errov[2]=Errov[1];
Errov[1]=Errov[0];
Errov[0] = - Vbanco + 53490;
Vv[2]=Vv[1];
Vv[1]=Vv[0];
// Aquisição dos sinais
79
Vv[0] = 5e-8*Errov[0] - 4.997e-8*Errov[1] +Vv[1];
Iref=Vv[0];
// Malha de corrente
Erro[2]=Erro[1];
Erro[1]=Erro[0];
Iref2=10.4875e-6*Vrede*Iref;
Erro[0] = Iref2 - Iinv;
Vc[2]=Vc[1];
Vc[1]=Vc[0];
Vc[0]=22*Erro[0]-8.536*Erro[1]-0.0594*Vc[1];
if (Vc[0]>32000) {Vc[0]=32000;}
if (Vc[0]<-32000) {Vc[0]=-32000;}
Vd1=32767+Vc[0];
Vd2=32767-Vc[0];
}
// Sinais de comando
out[0]=Vd1;
out[1]=Vd2;
out[2]=Vv[0];
80
APÊNDICE D – Diagrama Esquemático Entrada_127AC
81
APÊNDICE E – Diagrama Esquemático RC_Load
82
APÊNDICE F – Diagrama Esquemático DC_Power_Supply
83
APÊNDICE G – Diagrama Esquemático Controle
84
APÊNDICE H – Diagrama Esquemático Senoide Referência e Sensor de
Corrente
85
APÊNDICE I – Diagrama Esquemático Inversor
86
APÊNDICE J – ProcessorExpert.c
/* ###################################################################
** Filename : ProcessorExpert.c
** Project : ProcessorExpert
** Processor : MKL25Z128VLK4
** Version : Driver 01.01
** Compiler : GNU C Compiler
** Date/Time : 2013-11-20, 13:58, # CodeGen: 0
** ###################################################################*/
/* Including needed modules to compile this module/procedure */
#include "Cpu.h"
#include "Events.h"
#include "TI1.h"
#include "TimerIntLdd1.h"
#include "TU1.h"
#include "PWM1.h"
#include "PwmLdd1.h"
#include "TU2.h"
#include "PWM2.h"
#include "PwmLdd2.h"
#include "Conta.h"
#include "BitIoLdd3.h"
#include "AD1.h"
#include "AdcLdd1.h"
#include "SD.h"
#include "BitIoLdd1.h"
#include "In_Rush.h"
#include "BitIoLdd2.h"
/* Including shared modules, which are used for whole project */
#include "PE_Types.h"
#include "PE_Error.h"
#include "PE_Const.h"
#include "IO_Map.h"
{
//-----------------------------------------------------------------------------------------------------//
Declaração das Variaveis
//-----------------------------------------------------------------------------------------------------double Vrede, Vbanco, Iinv;
int Sen_Ref=0, Banco_CAP=0, Sen_Corr=0; // PTB0, PTB1, PTB2
double conta_corrente,soma_corrente;
double Iref, Iref2;
double Erro_0, Erro_1;
double Vc_0, Vc_1, Vc_2;
double Errov_0, Errov_1;
double Vv_0, Vv_1, Vv_2;
int Vd1, Vd2;
int x=0,cont=0;
87
for(;;)
{
//-------------------------------------------------------------------------------------------------------------// Declaração das Variaveis
//-------------------------------------------------------------------------------------------------------------if (x <= 0)
{
x = 1;
Erro_0 = 0.;
Erro_1 = 0.;
Vc_0 = 0.;
Vc_1 = 0.;
Vc_2 = 0.;
Errov_0 = 0.;
Errov_1 = 0.;
Vv_0 = 0.;
Vv_1 = 0.;
Vv_2 = 0.;
}
// Aquisição dos sinais
AD1_Measure(TRUE);
AD1_GetChanValue16(0x0,&Sen_Ref); // Leitura do Sensor da Senoide de Referência
AD1_GetChanValue16(0x1,&Banco_CAP); // Leitura do Sensor do Banco de Capacitores
AD1_GetChanValue16(0x2,&Sen_Corr); // Leitura do Sensor da Corrente da Rede
Vrede = Sen_Ref - 28002;
Vbanco = Banco_CAP;
Iinv = Sen_Corr - 30100;
//1.45/3*2e16
// Malha de tensão
Errov_1 = Errov_0;
Errov_0 = -Vbanco + 50400; //2.6/3*2e16
Vv_2 = Vv_1;
Vv_1 = Vv_0;
// Compensador de Tensão
Vv_0 = 0.00000005*Errov_0 – 0.00004997*Errov_1 + Vv_1;
if (Vv_0 > 64000) {Vv_0 = 64000;}
if (Vv_0 < -64000) {Vv_0 = -64000;}
Iref = Vv_0;
88
//Iref=1000;
// Malha de corrente
Erro_1 = Erro_0;
//Iref2 = 10.4875e-6*Vrede*Iref;
Erro_0 = Iref2 - Iinv;
Vc_1 = Vc_0;
// Compensador de Corrente
//Vc_0 = 22*Erro_0 -8.536*Erro_1 -0.0594*Vc_1;
if (Vc_0 > 30000) {Vc_0 = 30000;}
if (Vc_0 < -30000) {Vc_0 = -30000;}
Vd1 = 32767 - Vc_0;
Vd2 = 32767 + Vc_0;
PWM1_SetRatio16(Vd1);
PWM2_SetRatio16(Vd2);
}
#ifdef PEX_RTOS_START
PEX_RTOS_START();
#endif
/* END ProcessorExpert */
89
APÊNDICE K – Events.c
/* ###################################################################
** Filename : Events.c
** Project : ProcessorExpert
** Processor : MKL25Z128VLK4
** Component : Events
** Version : Driver 01.00
** Compiler : GNU C Compiler
** ###################################################################*/
#include "Cpu.h"
#include "Events.h"
#ifdef __cplusplus
extern "C" {
#endif
void TI1_OnInterrupt(void)
{
// Habilita o In Rush após 100ms
In_Rush_SetVal();
// Habilitação do SD dos Drivers
SD_SetVal();
// Desabilitar a interrupção do Timer
TI1_Disable();
}
/* END Events */
#ifdef __cplusplus
} /* extern "C" */
#endif
90
APÊNDICE L – Tabela dos Custos dos Materiais do Protótipo
Descrição
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
Barra de Pinos BMD040
Borne B09
Cabos
Capacitor 100n
Capacitor 10u/63V
Capacitor 4700u/35V
Cinta
Diodo 1N4007
Diodo 1N4148
Diodo Zener 3V9
DR DLZ176 JNG
Fita dessoldadora
FRDM-KL25Z
Fusível Rápido 15A
Indutor 2,24mH
Indutor 2,24mH
Indutor 700uH
LDV33
LM7804
LM7824
Parafuso 1/8x2
Parafuso 3,5/40
PCB Cooling FETs
PCB DC_power_supply
PCB Entrada_127AC
PCB MCU_Inversor
PCB RC_Load
PCF 03 Fêmea
PCF 04 Fêmea
PCM 03 Macho
PCM 04 Macho
Pino Banana
Ponte KBPC3510
Porta fusível
Prolongador
Terminal PCT
Trafo +-6VAC - 0,4A
Trafo +-9VAC - 1A
outros
Qtd
1
18
8
10
6
2
1
10
5
10
1
1
1
2
1
1
1
1
1
1
26
26
1
1
1
1
1
10
10
10
10
18
1
1
21
40
1
1
1
Unidade (R$)
2,40
3,80
2,35
0,10
0,10
2,60
3,90
0,10
0,10
0,25
35,00
14,90
54,00
0,26
180,00
180,00
60,00
0,97
0,97
0,97
0,08
0,06
28,00
45,10
56,20
150,00
42,20
0,10
0,10
0,20
0,30
2,95
4,90
0,55
0,45
0,10
8,30
14,20
60,00
Total
Valor (R$)
2,40
68,40
18,80
1,00
0,60
5,20
3,90
1,00
0,50
2,50
35,00
14,90
54,00
0,52
180,00
180,00
60,00
0,97
0,97
0,97
2,11
1,53
28,00
45,10
56,20
150,00
42,20
1,00
1,00
2,00
3,00
53,10
4,90
0,55
9,45
4,00
8,30
14,20
60,00
1.118,27